ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
|
|
|
- Matyáš Bílek
- před 6 lety
- Počet zobrazení:
Transkript
1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2012 Martin Tröstl
2 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE BAKALÁŘSKÁ PRÁCE Vedoucí práce Ing. Jindřich HODAČ, Ph.D. Katedra mapování a kartografie květen 2012 Martin TRÖSTL
3 Zadání bakalářské práce
4 ABSTRAKT V této bakalářské práci jsou testovány vlivy vybraných parametrů na přesnost fotoplánu. Testování je prováděno pomocí geodeticky zaměřeného testovacího pole. Testován je vliv způsobu odstranění distorze snímků, vliv konfigurace vlícovacích bodů, vliv počtu vlícovacích bodů a vliv použité konstanty komory při snímkování. Pro tvorbu fotoplánů je použit software SIMphoto. Nejvyšší vliv z testovaných parametrů byl zjištěn u způsobu odstranění distorze. Podle geometrické kvality fotografie před vstupem do transformace se odvíjí vlivy ostatních parametrů na výslednou přesnost fotoplánu. KLÍČOVÁ SLOVA Fotoplán, SIMphoto, testovací pole, přesnost, kalibrace, konfigurace vlícovacích bodů, odstranění distorze ABSTRACT This bachelor thesis tests the influence of the chosen parameters on accuracy of the photogrammetic plan. The testing process is performed by a geodesic focused test field. The effect of a distortion removal method is tested, the influence of control points configuration, the influence of the control points number and the influence of the used constant of the imaging chamber for imaging. SIMphoto software is used for the creation of photoplans. The highest effect of the tested parameters was found out in a way of distortion removal. Influences of other parameters on the resulting photogrammetic plan accuracy depend on the accuracy of the photography before entering the transformation. KEYWORDS Photomap, SIMphoto, test field, accuracy, calibration, removal of distortions, points configuration
5 Čestné prohlášení Prohlašuji, že jsem tuto bakalářskou práci vypracoval samostatně, pouze za odborného vedení vedoucího bakalářské práce Ing. Jindřicha Hodače, Ph.D. Dále prohlašuji, že veškeré podklady, ze kterých jsem čerpal, jsou uvedeny v seznamu použité literatury. Datum: Martin Tröstl
6 PODĚKOVÁNÍ Rád bych poděkoval vedoucímu bakalářské práce za odborné vedení a pomoc při zpracování této práce. Dále bych chtěl poděkovat své rodině za podporu při tvorbě bakalářské práce i během celého studia.
7 Obsah 1 Úvod Testovací pole Výběr testovacího pole Zaměření testovacího pole Teorie tvorby fotoplánu Použité přístroje a programy Canon EOS 5D Mark II Trimble 3600 DR SIMphoto PhotoModeler ShiftN Kalibrace v SW PhotoModeler Snímání kalibračního pole Výpočet kalibrace Testování Snímkování Vizualizace výsledků testování Testování způsobů odstranění distorze Bez odstranění distorze Odstranění distorze v ShiftN Kalibrace PhotoModeler Zhodnocení Vliv počtu vlícovacích bodů a jejich konfigurace Použitých 6 bodů pro transformaci Použity 4 body pro transformaci Vliv použité konstanty komory Závěr Seznam použité literatury Seznam příloh
8 1 Úvod Předmětem této bakalářské práce je testování různých vlivů na přesnost výsledného fotoplánu. Pro toto určení byla zvolena technologie testování pomocí rovinného testovacího pole. Body testovacího pole jsou zaměřeny geodeticky s dostatečnou přesností. Při testování jsou hodnoceny rozdíly mezi takto určenými souřadnicemi a souřadnicemi odečtenými z jednotlivých vytvořených fotoplánů. Souřadnicové rozdíly na jednotlivých bodech jsou vyneseny do přehledných grafů, které jsou uvedeny v příloze. O volbě a zaměření testovacího pole pojednává druhá kapitola. Testovací pole je zaměřeno geodeticky pomocí totální stanice ze dvou stanovisek. Výpočet souřadnic bodů probíhá různými výpočetními metodami a výsledkem je průměr. Tím je docíleno, aby přesnost určení bodů byla pro testování dostatečná. Dosažená přesnost je zde zhodnocena. Ve třetí kapitole jsou uvedeny a popsány použité softwary. Uvedeny jsou zde programy použité pro fotogrammetrické úpravy. Hlavním programem při tvorbě fotoplánů a posuzování jejich přesnosti byl software SIMphoto. Pak jsou zde uvedeny programy pro provedení kalibrace. V další kapitole je popsán postup kalibrace neměřické komory v programu PhotoModeler. Pomocí této kalibrace byly upraveny nejen snímky použité pro testování této kalibrace, ale snímky všech dalších testů. Proto je mu věnována samostatná čtvrtá kapitola. V páté kapitole jsou již popsány konkrétní testy a prezentace jejich výsledků. Nejprve je zde testován vliv různých způsobů odstranění distorze snímku. Zde jsou porovnány fotoplány určené ze snímků bez zavedení distorze, s upravenými snímky v programu Shift, který je založen pouze na odhadu distorze pomocí optického vjemu(tj. od oka) a třetí metodou je korektní kalibrace v programu PhotoModeler. Předmětem podkapitoly 5.4 je testování vlivu počtu a konfigurace vlícovacích bodů při transformaci. Počet bodů je volen na 6 bodů a 4 body. Rozmístění bodů je voleno po celém snímku, ve dvou třetinách, třetině a u 4 vlícovacích bodů i v jedné šestině. 7
9 Posledním testem je vliv použitého nastavení zoomu (tj. konstanty komory). V průběhu testování byly použity konstanty komory 16 mm a 24 mm. Zde už je pouze zhodnocení na základě výsledků získaných v předchozích kapitolách. V závěru jsou popsány dosažené výsledky. Cílem této práce je tedy pomocí testovacího pole a vytvořených fotoplánů určit, jak ovlivňují přesnost výsledného fotoplánu tyto vlivy: vliv způsobu odstranění distorze vliv počtu a konfigurace lícovacích bodů vliv použité konstanty komory Z této práce by mělo být patrné, co si tvůrce fotoplánu může dovolit při jeho tvorbě, aby splnil požadovanou přesnost. 8



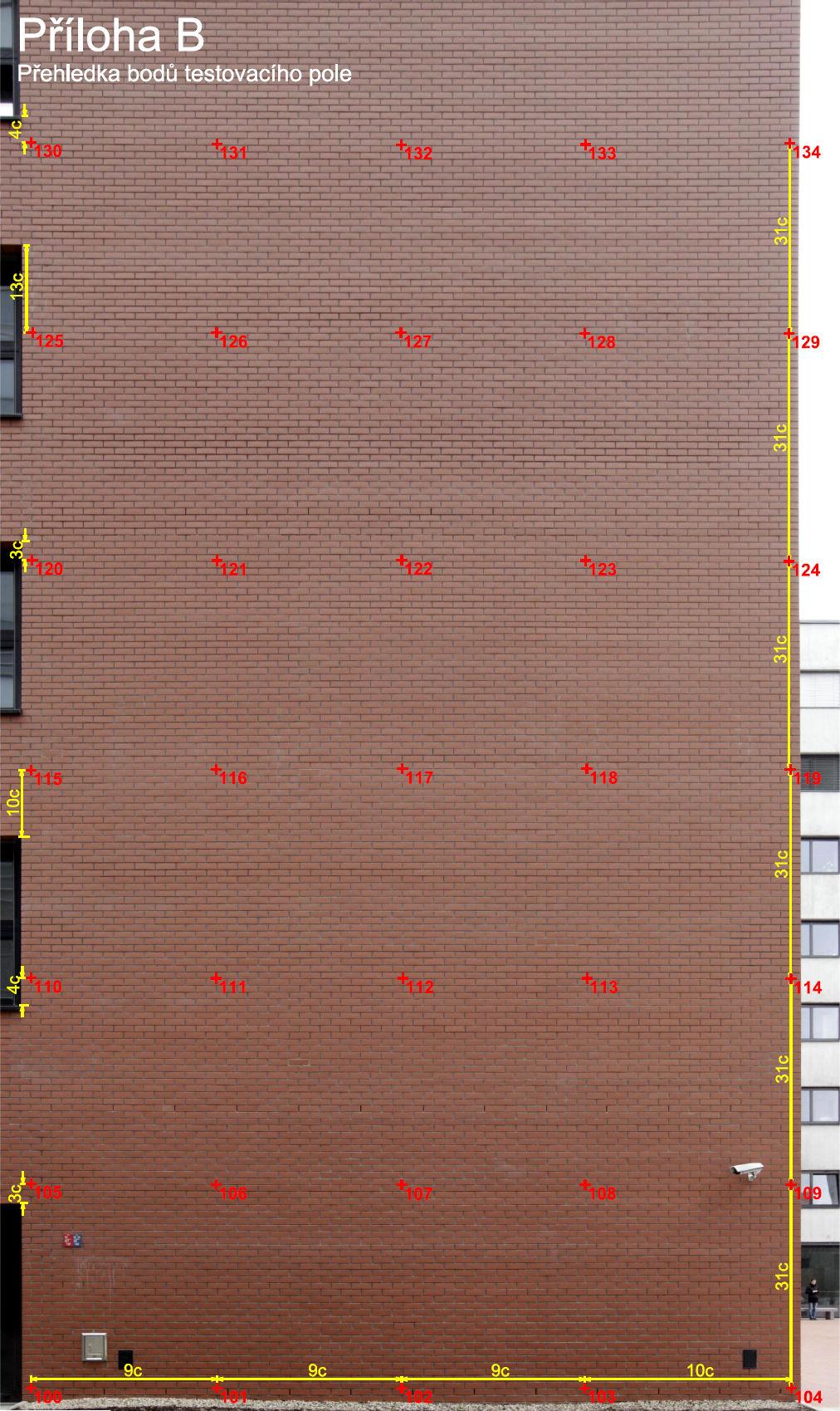
10 2 Testovací pole Před samotným testováním je nutné zvolit vhodné testovací pole a zaměřit s dostatečnou přesností souřadnice jeho bodů. 2.1 Výběr testovacího pole Při výběru testovacího pole byly definovány nároky na rozměr tohoto pole přibližně 10 ä 15 metrů. Dalším požadavkem bylo, aby na testovacím poli byl dostatečný počet dobře identifikovatelných bodů. Proto by mělo být pole dostatečně kontrastní. Síť bodů testovacího pole by měla být pokud možno co nejvíce pravidelná. Pole by mělo být rovinné. Objekt pro zhotovení testovacího pole s požadovanými vlastnostmi byl nalezen přímo v blízkosti fakulty. Je jím část jihozápadní stěny fakulty architektury a fakulty informačních technologií. Testovací pole je orientováno na výšku. Jeho rozměry jsou přibližně 9 ä 15 metrů. Stěna je složena z dlaždic cihlového tvaru. To umožňuje dostatečně pravidelné rozložení bodů testovacího pole. Jako body testovacího pole jsou určeny rohy dlaždic. Body jsou rozmístěny do sedmi řad po pěti bodech. Počet bodů testovacího pole tedy činí 35. Vzdálenost mezi jednotlivými body je necelých 2,5 metru. V lichých řadách jsou body umístěny ve spodním rohu cihly, která je vlevo od spáry. U sudých řad je bod umístěn v horním rohu cihly, která je opět vlevo od spáry. Přehledka testovacího pole je uvedena v příloze B a DVD příloze [VII]. Obr. 2.1: Umístění bodu v liché řadě Obr. 2.2: Umístění bodu v sudé řadě 9

11 2.2 Zaměření testovacího pole Obr. 2.3: Testovací pole Dne 23.listopadu 2012 bylo provedeno zaměření testovacího pole totální stanicí Trimble 3600 DR. Tento přístroj umožňuje měření jak na odrazný hranol, tak měření se samoodrazem. Zaměření bylo provedeno ze dvou stanovisek 4001 a 4002, aby byl možný výpočet souřadnic protínáním. Mezi stanovisky bylo použito měření na hranol. Body testovacího pole byly zaměřeny pomocí samoodrazu. Celkem bylo zaměřeno 35 bodů testovacího pole. Měření bylo ukládáno do vnitřní paměti přístroje. Na konci měření na každém stanovisku byla zkontrolována orientace. V DVD příloze [I] jsou uvedeny zápisníky měření pro zpracování v Gromě. 10
12 Obr. 2.4: Situace Výpočet souřadnic: Počátek byl vložen do bodu Osa X byla dána do spojnice s bodem 4002 a osa Y směřuje ke zdi. Souřadnice bodu 4002 byly určeny průměrem z měření na obou stanoviscích. ČB Y[m] X[m] Z[m] ,000 0,000 0, ,000 21,367 0,291 Tab. 2.1: Souřadnice stanovisek Dále byly vypočítány body testovacího pole polární metodou dávkou z obou stanovisek. Následoval výpočet protínání z úhlů a protínání z délek. Polohové souřadnice byly tedy získány čtyřikrát (ze stejných dat). Výsledné souřadnice byly vypočteny aritmetickým průměrem. Výšková souřadnice byla určena dvakrát trigonometricky. Výsledkem je opět průměr. Takto získané souřadnice byly sklopeny do roviny. Následně byla provedena transformace. Počátek soustavy byl vložen do bodu 100 v levém dolním rohu. Osa Y je orientována do spojnice bodů 100, 130 a osa Y vpravo. Výpočet byl proveden v programu Groma 7. Protokoly a seznamy souřadnic jsou přiloženy v příloze na DVD [II] a [III]. 11
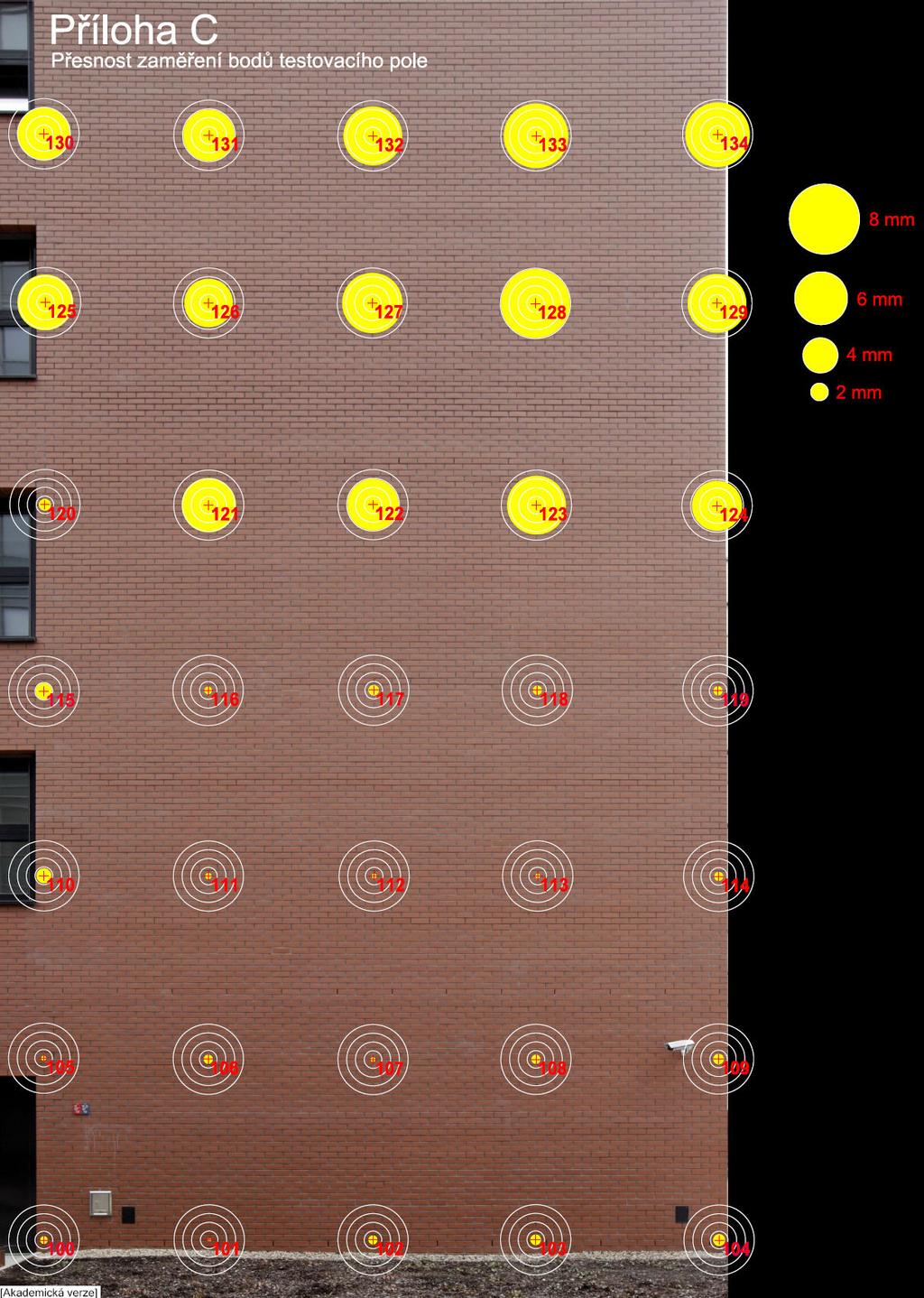
13 Přesnost v zaměření bodů není stejná. Z důvodu strmosti záměr jsou výše položené body určeny s nižší přesností. Přesnost byla hodnocena pomocí výběrové směrodatné odchylky souřadnicové. Nepřesnost souřadnic ve směru kolmém na testovací pole byla díky sklopení do roviny eliminována. Výběrová směrodatná odchylka souřadnice X byla získána ze čtyř určení této souřadnice a směrodatná odchylka souřadnice Y byla určena ze dvou určení. Protože jsou na snímcích odečítány souřadnice a ve vizualizaci jsou používány souřadnicové rozdíly, tak je výsledná přesnost bodů testovacího pole vyjádřena pomocí výběrové směrodatné odchylky souřadnicové. [ vxvx] ( n 1) sx =, n s xy = s 2 x s 2 y + s = 2 y [ v v ] n y y ( n 1) V softwaru MicroStation byl zhotoven obrázek zobrazující body a přesnost jejich určení (viz. příloha č. 3 a [VIII]). Maximální směrodatná odchylka souřadnicová dosahuje hodnoty 8 mm. Ve spodní části je ovšem přesnost výrazně vyšší a maximální hodnota v oblasti do čtvrté řady bodů je 2 mm. Souřadnice ze všech metod výpočtu a z nich získané průměrné hodnoty i s popisem přesnosti jsou uvedeny v příloze na DVD č. [IX]. 2.3 Teorie tvorby fotoplánu Tvorba fotoplánu patří mezi základní úlohy jednosnímkové fotogrammetrie. V případě, že je snímek rovinného objektu přesně svislý, pak je vztah mezi snímkem, objektem a fotoplánem jednoduchý. Obraz se liší pouze měřítkem. Obecně však toto neplatí, a tak je měřítko ve snímku proměnné s polohou na snímku z důvodu různé vzdálenosti k jednotlivým bodům, proto dochází k perspektivnímu pohledu. V případě zvoleného testovacího pole se jedná o objekt rovinný, tudíž není nutné se zabývat radiálními posuny podrobných bodů v závislosti na prostorovém rozložení. Jako geometrický vztah mezi rovinami tedy platí Pappova věta. Dvojpoměr čtveřice bodové nebo paprskové zůstává v rovině mapy i snímku zachován. 12
14 13 Obr. 2.5: Pappova věta Matematickým vyjádřením skutečnosti je kolineární transformace mezi snímkem a fotoplánem. Touto transformací přecházíme z 3D do 2D ˆ ˆ ˆ ˆ ˆ ˆ c y c x c a y a x a X = ˆ ˆ ˆ ˆ ˆ ˆ c y c x c b y b x b Y = Pro řešení těchto rovnic je potřeba pět identických bodů. Rovnice mají dohromady devět neznámých. Jedné neznámé se zbavíme pomocí substituce, kdy vydělíme rovnice konstantou 3 ĉ. Pak stačí k transformaci čtyři identické body. Zjednodušené rovnice mají tvar: = y c x c a y a x a X = y c x c b y b x b Y Řešení kolineární transformace se provádí pomocí různých softwarů. V těchto programech je nutná identifikace minimálně čtyř identických (vlícovacích) bodů. Těmto bodům jsou přiřazeny geodetické souřadnice a je proveden výpočet. Mnohé programy umožňují zadávání pouze délek mezi těmito body a souřadnice si vypočítají sami. V této práci byl pro tvorbu fotoplánu použit software SIMphoto. V této kapitole bylo čerpáno z [1] D B D A C B C A D B A D B C A C =

15 3 Použité přístroje a programy V této kapitole jsou popsány přístroje použité při zaměření a snímkování testovacího pole. Dále jsou zde popsány programy použité pro úpravu snímků a tvorbu fotoplánů. 3.1 Canon EOS 5D Mark II Canon EOS 5D Mark II je digitální zrcadlovka s full frame snímačem, který má rozlišení 21,1 megapixelů. Rozměry full frame CMOS čipu jsou mm. Rozlišení fotoaparátu je pixelů. Přístroj má také schopnost pořizovat videosekvence ve Full HD kvalitě 1920 x 1080 pixelů. Fyzická velikost jednoho pixelu je 6,4 mikrometru. Rozsah citlivostí je ISO 100 až ISO 6400, při aktivaci rozšíření citlivosti je k dispozici rozsah ISO 50 až Snímač má integrovaný čistící systém EOS. Autofokus má 9 hlavních ostřících bodů plus dalších 6 pomocných ostřících bodů. Volič režimů expozice nabídne klasické složení programové automatiky, priority clony, priority času a plně manuálního nastavení. Nastavení doby expozice je možné od 30 sekund až do 1/8000 s. Čerpáno z [3]. Obr. 3.1: Canon EOS 5D Mark II 14

16 3.2 Trimble 3600 DR Totální stanice Trimble 3600 s označením DR jsou vybaveny duálním dálkoměrem, umožňujícím měřit s přesností 3mm + 2 ppm na hranol s dosahem až 2500 m. Patentovaný dálkoměr s pasivním odrazem měří s přesností 3 mm + 2 ppm do vzdálenosti 150 m. Přesnost měření úhlů je 0,9 mgon. Měření se ukládá do vnitřní paměti viz [4] a [5]. Obr. 3.2: Trimble 3600 DR 15

17 3.3 SIMphoto Pro testování byla používána aplikace SIMphoto. Jedná se o volně šířitelný software vytvořený v rámci diplomové práce ing. Davida Čížka na Fakultě stavební, ČVUT v Praze. Program je prvotně určen pro odborníky z památkové péče k dokumentaci historických objektů. SIMphoto je aplikace zaměřená na zpracování rastrových dat metodou jednosnímkové fotogrammetrie. V aplikaci je možné otevřít a editovat jen dva podporované typy rastrových obrázků JPEG a TIFF. Fotoplán může být vytvořen na základě měření vlícovacích bodů, nebo zaměření jednoduché sítě délek. Je také možné snímku přiřadit rozměr ze samostatně určených vzdáleností. Software zároveň předkládá několik funkcí umožňujících odstranění distorze objektivu, vložení grafického měřítka, otočení rastru a další. Na výsledném fotoplánu lze určovat libovolné vzdálenosti. Výstup se ukládá do formátů TIFF, JPEG, nebo PDF (pro tisk v měřítku). Čerpáno z [6]. Webová stránka programu: Obr. 3.1: Obrazovka SIMphoto 16

18 3.4 PhotoModeler Program PhotoModeler je software vyvinutý kanadskou firmou EOS Systems Inc. Software je určen pro tvorbu rovinných či prostorových modelů. Další z jeho funkcí je i možnost provést kalibraci pomocí předdefinovaného testovacího pole a k tomuto účelu byl program použit v této bakalářské práci. Internetové stránky firmy: ShiftN ShiftN je freewarová aplikace, která umí automaticky analyzovat a opravit chybné perspektivní linie na fotografiích. Je vhodný především pro úpravy fotografií geometricky přesných budov či jiných objektů s dobře identifikovatelnými liniemi. Program umožňuje jak automatickou opravu distorze, tak manuální opravu. Webové stránky: Obr. 3.2: ShiftN Dále byl použit program Groma pro výpočet geodetických souřadnic a Microsoft Excel pro práci s tabulkami. Pro vizualizace byl použit program MicroStation. 17
19 4 Kalibrace v SW PhotoModeler Kalibrace neměřičské digitální komory slouží k určení vlastností tohoto přístroje. Těmito vlastnostmi jsou parametry tzv. prvků vnitřní orientace. Mezi prvky vnitřní orientace patří:: Konstanta komory Poloha hlavního snímkového bodu Zkreslení = distorze Rozličné další parametry Pojem zkreslení shrnuje více dílčích vlivů. Těmito vlivy jsou radiální, tangenciální a symetrická distorze, nekolmost os souřadnicového systému a afinita. V praxi se často využívá pro souhrnný popis těchto vlivů polynomická funkce, která s dostatečnou přesností popisuje zkreslení daného objektivu. U digitálních komor se při snímkování využívá více ohniskových vzdáleností. Pro každé toto nastavení je potřeba provést samostatnou kalibraci. Pro kalibraci byla použita metoda pomocí rovinného kalibračního pole. 4.1 Snímání kalibračního pole Pro každou konstantu komory bylo nasnímáno 12 snímků (viz DVD příloha [3]) kalibračního pole používaného pro tento účel na fakultě. Byla snaha o stejné nastavení fotoaparátu jako při snímkování přímo v terénu. Pravidla pro pořizování snímků jsou: Všechny snímky pořízeny na jedno zapnutí fotoaparátu Neměnit zaostření nastavit manuální zaostření Konfigurace - Snímky byly pořizovány přibližně pod úhlem 45. Pole bylo nasnímáno ze všech čtyř stran nejprve v normální poloze, poté s natočením fotoaparátu o 90 doprava a doleva. Pokrytí pole pole by mělo pokrývat co největší část snímku 18
20 ČESKÉ VYSOKÉ UČENÍ V PRAZE Obr. 4.1: Ukázka snímku pro kalibraci 4.2 Výpočet kalibrace Kalibrace byla provedena pro konstanty komory 16 mm a 24 mm. K výpočtu kalibračních prvků byl použit program PhotoModeler Scanner. Tento program umožňuje výpočet těchto parametrů: Konstanta komory Koeficienty distorze Souřadnice hlavního snímkového bodu Postup kalibrace bude dále popsán pouze pro hodnotu 16 mm. Výpočet pro hodnotu 24 mm proběhl obdobně. V programu byl zvolen nový projekt a následně bylo do něho importováno dvanáct snímků kalibračního pole. Poté je potřeba nastavit výchozí hodnoty prvků vnitřní orientace. Zadávána je konstanta komory v celých milimetrech v tomto případě 16 mm. Dále je zadávána velikost čipu, kterou je nejprve nutné vypočítat. Hodnotu získáme vynásobením počtu pixelů ( ) fyzickou velikostí jednoho pixelu 6,4 mm(w = 35, 9424 mm, H = 23, 9616 mm). Jako poloha hlavního snímkového bodu 19

21 se použije polovina z těchto hodnot. Ostatní hodnoty(koeficienty distorze) se ponechají nulové. Obr. 4.2: Počáteční nastavení prvků vnitřní orientace Po nastavení přibližných hodnot můžeme přejít k výpočtu kalibračních prvků. V nabídce Project/Camera Calibration/Options se nastaví možnosti vlastního výpočtu. Tato nastavení byla provedena podle postupu, který doporučuje p. Ing. Řezníček na základě zkušeností s tímto programem. Nastavení se skládá ze dvou částí (Procesing stage: Stage1, Stage2). V nastavení Stage1 necháme zaškrtnuty konstantu komory, polohu hlavního snímkového bodu a první koeficient průběhu radiální distorze. U nastavení Stage2 jsou zaškrtnuty všechny kalibrované hodnoty. Celé nastavení je zobrazeno na obrázcích obr. 4.3 a obr Po dokončení nastavení se spustí první výpočet. 20




22 Obr. 4.3: První výpočet Stage1 Obr. 4.4: První výpočet Stage2 Při automatickém označení a referencování bodů dochází k chybám, které je nutné manuálně odstranit. Program nás dále informuje o tom, zda byl některý z kal. parametrů vyloučen z důvodu korelace. Při novém nastavení je vhodné tyto parametry z výpočtu vynechat. Opět zde přikládám tabulky znázorňující nové nastavení kalibrace obr. 4.5 a obr Obr. 4.5: První výpočet Stage1 Obr. 4.6: První výpočet Stage2 Výsledkem celé kalibrace je kalibrační protokol, který získáme po druhém výpočtu. V protokolu je možné vyčíst hodnoty prvků vnitřní orientace a přesnost s jakou byly určeny. Tak můžeme hodnotit správnost kalibrace a vyčíst zde, zda došlo ke korelaci. Kalibrace byla provedena pro konstanty komory 16 mm a 24 mm. Příslušné protokoly jsou uvedeny v DVD příloze [III]. 21
23 parametr I II Legenda F[mm] 16,223 23,457 konstanta komory X[mm] 17, ,012 Y[mm] 11, ,839 K1 2, , K2-2, , K3 0 4, P1 3, , P2-2, , souřadnice hlavního snímkového bodu koeficienty radiální distorze koeficienty tangenciální distorze Tab. 4.1: Výsledné hodnoty prvků vnitřní orientace 22
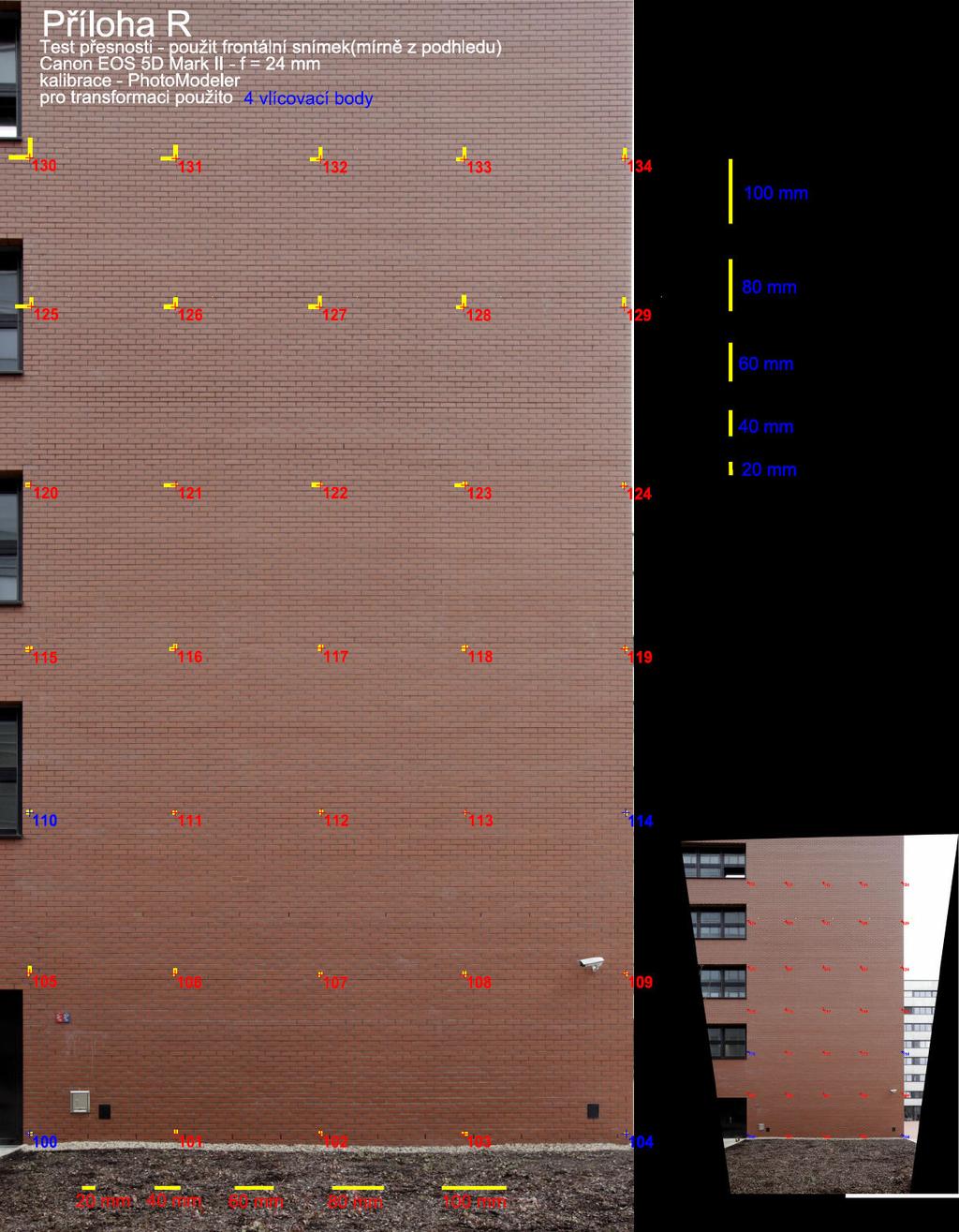
24 5 Testování V této kapitole jsou testovány různé vlivy na přesnost při tvorbě fotoplánu: vliv způsobu odstranění distorze vliv počtu a konfigurace vlícovacích bodů vliv použité konstanty komory Testování je prováděno na základě geodeticky zaměřeného testovacího pole. Přesnost testování je také ovlivněna přesností geodetického zaměření bodů testovacího pole a přesností identifikace(odečtení) jednotlivých bodů v programu SIMphoto. 5.1 Snímkování Při snímkování testovacího pole byl použit fotoaparát Canon EOS 5D Mark II. Snímkování probíhalo z ruky. Testovací pole je orientováno na výšku, proto jsou pořízené snímky získané z podhledu. V nastavení byla vybrána priorita nastavení času. Čas snímání byl nastaven na 1/60 s. Hodnota ISO byla nastavena na 400. Pro konstanty komory 16 mm a 24 mm byly pořízeny série snímků testovacího pole s drobnými úpravami nastavení fotoaparátu. Pro testování byly ze získaných snímků vybrány ty, které měly dobrou konfiguraci, byly dostatečně ostré a kontrastní. Tyto snímky jsou uvedeny v DVD příloze [IV]. Dále byly pořízeny snímky pro určení koeficientu distorze v programu Shift. V tomto případě byla použita pouze konstanta komory f = 16 mm. Byla snímkována pouze část testovacího pole. Přitom byla snaha o kolmost osy záběru na rovinu stěny. Snímky jsou použity v podkapitole a jsou součástí příloh odevzdaných na DVD [IV]. 5.2 Vizualizace výsledků testování Pro každý vytvořený fotoplán v rámci testování byl v programu MicroStation na podkladu jedné z transformovaných fotografií vytvořen graf. Je zde zobrazena síť bodů testovacího pole a na každém z těchto bodů je pomocí vektorů ve směru os X a Y zobrazen posun bodu ve vytvořeném fotoplánu oproti skutečnému umístění zjištěnému 23
25 pomocí geodetického zaměření. Pro tvorbu grafu byla vytvořena dvě měřítka tak, aby bylo možné vizuálně hodnotit výsledky testů. Vektorové měřítko je zobrazeno v pravé a ve spodní části grafu. Každý graf je opatřen popisem použitého fotoaparátu a konstanty komory. Dále je zde uveden počet bodů použitých pro transformaci a jejich umístění je zobrazeno modrou barvou. V pravé dolní části je zobrazena miniatura skutečného transformovaného snímku i s umístěním bodů testovacího pole a bodů označených modře, které byly použity v transformaci viz přílohy [VI]. 5.3 Testování způsobů odstranění distorze V prvním případě byl vytvořen fotoplán z původních neupravených snímků. Ve druhém případě byl k úpravě snímku použit program ShiftN a jako třetí možnost byla provedena oprava snímku podle kalibračních protokolů získaných v programu PhotoModeler. Distorze byla odstraněna v programu SIMphoto. Testování proběhlo pro konstanty komory 16 mm a 24 mm. Všechny fotoplány byly vytvořeny v programu SIMphoto Bez odstranění distorze Nejprve byl spuštěn program SIMphoto a do něj byl načten snímek. Dále byla použita volba fotoplán metoda zaměření vlícovacích bodů. Zde bylo navoleno spustit snímání a pomocí kurzoru byly označeny identické body. Pro tvorbu fotoplánu bylo použito 6 identických bodů rovnoměrně rozmístěných po poli. Po označení všech šesti bodů bylo navoleno otevřít tabulku bodů a každému bodu byly přiděleny souřadnice určené geodeticky. Následně bylo využito tlačítko zobrazit opravy. Pomocí oprav lze určit, zda je přesnost sejmutí souřadnic přibližně stejná. Pokud je hodnota nějaké opravy výrazně vyšší, je dobré zkontrolovat přesnost sejmutí tohoto bodu. Transformační tabulky byly ukládány do textových souborů. Následně bylo stisknuto tlačítko transformovat a v zobrazeném okénku byla zadána výsledná skutečná velikost jednoho pixelu. Proběhla transformace a vznikl výsledný fotoplán s možností odečítat souřadnice a určovat vzdálenosti. 24
26 Ve výsledném fotoplánu byly pomocí kurzoru odečteny souřadnice všech bodů testovacího pole. V programu Microsoft Office Excel byly vypočteny souřadnicové rozdíly souřadnic bodů určených geodeticky a souřadnic určených z fotoplánu má býti mínus jest. Souřadnicové rozdíly byly vyneseny se záporným znaménkem do grafu, jako vektory zobrazující kam je bod posunut ve fotoplánu oproti skutečnosti. Výsledky: f = 16 mm příloha D Z vytvořeného grafu je patrné, že distorze má velký vliv na výslednou přesnost fotoplánu. V blízkosti bodu 112 byl střed snímku u neupravené fotografie. Od tohoto bodu se nepřesnost všemi směry zvyšuje. Vektory směřují směrem ven od tohoto bodu. Je patrné, že na bodech použitých při transformaci je přesnost mnohem vyšší než na ostatních bodech. To ovlivňuje i vysokou přesnost nejvyšší řady bodů. Nejvyšší odchylky byly zjištěny v částech v horní části fotoplánu ve středu mezi vlícovacími body. Maximální polohová odchylka dosahuje hodnoty 10 cm. f = 24 mm příloha E Fotoplán vytvořený objektivem s ohniskovou vzdáleností f = 24 mm již není tolik nepřesný. To lze přičíst tomu, že v tomto nastavení se distorze téměř neuplatňuje. Stále je zde možné sledovat zhoršení přesnosti v závislosti na vzdálenosti od středu původního snímku. Nejvyšší dosažená odchylka zde činí již pouze 2,5 cm. Na bodech použitých v transformaci je možno sledovat daleko vyšší přesnost než ve zbytku sítě Odstranění distorze v ShiftN V programu ShiftN je možnost odstranění distorze manuálně. Nejprve byl sejmut snímek kolmo na stěnu, která byla použita jako testovací pole. Její výhodou jsou dobře znatelné linie. Při snímání bylo použito stejné nastavení fotoaparátu, jako při snímání pro tvorbu fotoplánu. Testována byla jen konstanta komory f = 16 mm. Na snímcích s touto konstantou komory je radiální distorze opticky dobře znatelná. 25

27 Obr. 5.1: Snímek pro odhad koeficientu radiální distorze v ShiftN V programu ShiftN byl načten takto získaný snímek. V panelu nástrojů byla použita funkce Adjust correction. Zde byl pomocí jezdce iterativním způsobem zjištěn nejvhodnější parametr distorze. Je zde možné porovnávat původní a upravený snímek. Program poskytuje pomocné linie, podle kterých lze lépe odhadnout kolmost či rovnoběžnost linií. Po úpravě by tedy měl vzniknout rastr s rovnými vzájemně kolmými liniemi. Koeficient distorze byl odhadnut na hodnotu 0,19. Obr. 5.1: Nastavení při opravě distorze v Shift 26

28 Po zjištění koeficientu byl do programu načten snímek určený pro tvorbu fotoplánu. V okně Adjust correction byla nastavena zjištěná hodnota distorze. Snímek byl upraven a uložen. Upravený snímek je součástí DVD přílohy. Snímek byl zpracován stejně jako neupravený snímek v podkapitole Nejprve byl načten do programu SIMphoto a zde byl pomocí šesti identických bodů vytvořen fotoplán. Souřadnicové odchylky byly vyneseny do grafu, který je uveden v příloze H. Výsledky: f = 16 mm Z grafu je možné poznat, že provedená kalibrace byla nedostatečná. Vektory zobrazující vychýlení bodů vůči skutečné poloze stále směřují ven ze snímku. Podle vzdálenosti od středu původního snímku se zvyšuje polohová odchylka. Přesto je přesnost fotoplánu znatelně vyšší než bez úprav. Maximální polohová odchylka zde činí již pouze 3,7 cm. Přesnost se tedy zvýšila pouze úpravou pomocí optického vjemu téměř 3 krát Kalibrace PhotoModeler Postup kalibrace byl popsán již v kapitole 4. Jedná se o korektní kalibrace pomocí dvanácti snímků. V programu SIMphoto je možnost zadat získané hodnoty do tabulky a provést transformaci, která distorzi opraví. Obr 5.2 a Obr. 5.3: Nastavení parametrů komory v SIMphoto 27
29 Kalibrované snímky byly uloženy a jsou uvedeny v DVD příloze. Poté z nich byl pomocí šesti vlícovacích bodů vytvořen fotoplán. Na vytvořeném fotoplánu byly odečteny souřadnice bodů testovacího pole a vyneseny do grafu. Výsledky: f = 16 mm příloha F Přesnost fotoplánu vytvořeného z kalibrovaného snímku je mnohem vyšší než v předchozích případech. Maximální polohová odchylka zde dosahuje 1,8 cm. Z vytvořeného grafu můžeme sledovat, že provedená kalibrace byla mírně přehnaná. Směr vynesených vektorů je u většiny bodů opačný, než v předchozích případech a směřují převážně do středu původního snímku (k bodu č. 112). Ve střední části snímku tedy můžeme pozorovat i vyšší přesnost. Také opět vidíme zvýšenou přesnost na bodech použitých při transformaci. f = 24 mm - příloha G Vytvořený fotoplán vykazuje přesnost, kterou se dá již těžko posuzovat pomocí použitého geodetického zaměření bodů. Z grafu můžeme vyčíst nepřesnost zaměření jednotlivých bodů. Nejvyšší nepřesnost vykazuje bod č. 120 a proto není ve výsledcích testů brán v úvahu. Odečteme-li vektory zobrazené v tomto grafu od vektorů v ostatních grafech, získáme jejich skutečnou hodnotu bez vlivu nepřesnosti geodetického určení. Toho bylo využito při tvorbě spojnicových grafů uvedených v dalších testech Zhodnocení Vliv způsobu odstranění distorze na přesnost výsledného fotoplánu je markantní. Při použití širokoúhlého objektivu bez korekcí dosahovala maximální polohová odchylka za daných podmínek snímkování 10 centimetrů. Při použití programu ShiftN a korekci pouze podle odhadu na základě optického vjemu byla hodnota maximální odchylky pro f = 16 mm snížena na 3,7 cm. To znamená, že získaný fotoplán je téměř třikrát přesnější. Použití této metody předpokládá distorzi znatelnou pouze podle oka. Umožňuje tedy lidem bez kalibrovaného fotoaparátu znatelně zvýšit přesnost. Jak získání koeficientu distorze objektivu, tak 28
30 úprava snímku v programu ShiftN je časově nenáročná. Program je volně dostupný, uživatelsky nenáročný a s jeho pomocí lze zvýšit přesnost bez velké námahy na rozumnou míru. Pokud použijeme k tvorbě fotoplánu snímky upravené pomocí kalibrace v programu PhotoModeler, je jeho přesnost vysoká. Pro širokoúhlý objektiv je maximální polohová odchylka menší než dva centimetry. U objektivu s ohniskovou vzdáleností f = 24 mm je přesnost výsledného fotoplánu vyšší než je možné posoudit použitým geodetickým zaměřením a snímáním souřadnic. Korektní kalibrací tedy můžeme zvýšit přesnost fotoplánu přibližně o řád oproti postupu bez odstranění distorze. Tato metoda je pro fotogrammetrické práce nejpoužívanější. Zvýšení přesnosti je markantní. Nevýhodou je potřeba příslušného softwaru. Kalibrace je časově náročnější a kalibraci je nutné provést přímo pro použitou konstantu komory. Při hodnocení získaných grafů bylo zjištěno, že bod č. 120 neodpovídá předpokládaným trendům a značně se tedy liší jeho přesnost od ostatních. V grafech je tento bod vynášen ale při hodnocení není uvažován. V DVD příloze [VI] jsou tabulky v Microsoft Office Excel pro f = 16 mm a f = 24 mm, kde jsou pro všechny body uvedeny odečtené souřadnice a souřadnicové rozdíly, pomocí kterých byly tvořeny grafy. 5.4 Vliv počtu vlícovacích bodů a jejich konfigurace Pro kolineární transformaci je nutný počet čtyři vlícovací body. Fotoplán určený pomocí pouze čtyř vlícovacích bodů je bez kontroly. Kromě kontroly je další výhodou většího počtu bodů i vyrovnání, kdy je minimalizován čtverec oprav. V této práci je testován počet čtyř a šesti vlícovacích bodů. Nejlepší rozestavení vlícovacích bodů je rovnoměrně po celém zaměřovaném objektu. Ne vždy je však možné pokrýt rovnoměrně zaměřenými body celý objekt (např. s ohledem na dostupné vybavení). Proto je v této kapitole testováno, jak se sníží přesnost při použití bodů ve dvou třetinách testovacího pole, v třetině a v jedné šestině. 29
31 Pro testování byl použit jako základní snímek vytvořený v podkapitole (tj. frontální s f = 24 mm).byl tedy použit snímek upravený v programu SIMphoto podle kalibračního protokolu získaného v SW PhotoModeler Použitých 6 bodů pro transformaci V programu SIMphoto byly vytvořeny série fotoplánů pro konstanty komory F = 16 mm a F = 24 mm. Jedna série obsahuje fotoplány vytvořené pomocí šesti vlícovacích bodů rozmístěných: a) po celém testovacím poli b) ve dvou třetinách testovacího pole c) v třetině testovacího pole Z každého fotoplánu byly odečteny souřadnice bodů testovacího pole. V SW Microsoft Excel byly vypočteny souřadnicové rozdíly mezi geodetickým zaměřením a těmito odečtenými souřadnicemi. Rozdíly byly vyneseny do přehledných grafů, které jsou uvedeny v příloze (viz dále). Výsledky: f = 16 mm Varianta a) Tento fotoplán a graf vyjadřující jeho přesnost byl vytvořen již pro testování vlivu způsobu odstranění distorze v podkapitole 5.3. Graf je uveden v příloze F. Přesnost fotoplánu je po celé ploše přibližně stejná. Maximální polohová odchylka zde činí 1,9 cm. Varianta b) Při transformaci nebyl použit bod č. 120, ale vedlejší bod č Při testování bylo zjištěno špatné geodetické zaměření bodu 120. Umístěním vlícovacích bodů do spodních dvou třetin testovacího pole bylo docíleno zvýšení přesnosti v této oblasti. Zatím co při rozmístění vlíc. bodů po celém snímku bylo dosaženo v této oblasti maximální odchylky 1,9 cm, při rozmístění ve dvou třetinách je to již pouze 1,3 cm. V horní oblasti grafu, kde nejsou zastoupeny vlícovací body, vidíme postupné zhoršování přesnosti. Nejhorší hodnoty vykazují body 30
32 v horních rozích testovacího pole. Maximální polohová odchylka zde činí 3,6 cm. Vektory naznačují, že v horní části se fotoplán roztahuje ve směru osy Y a do stran. Graf je uveden v příloze CH. Varianta c) Při umístění vlíc. bodů ve spodní třetině je již snížení přesnosti v horní části fotoplánu značné. Oproti třetině s vlícovacími body, kde max. polohová odchylka činí 1,3 cm, v levém horním rohu testovacího pole činí polohová odchylka 9,7 cm. Z vynesených vektorů je možné sledovat roztahování horní části fotoplánu. Graf je uveden v příloze I. f = 24 mm Varianta a) Fotoplán vytvořený pomocí snímku získaného objektivem s konstantou komory f = 24 mm, kde bylo použito šest vlícovacích bodů rozmístěných po celém testovacím poli byl vytvořen již pro testování vlivu způsobu odstranění distorze v kapitole 5.2. Graf je uveden v příloze G. Fotoplán vykazuje vysokou přesnost po celé ploše. Varianta b) Při transformaci nebyl použit bod č. 120, ale vedlejší bod č V průběhu testování bylo zjištěno špatné geodetické zaměření bodu 120. Přesnost spodní části fotoplánu zůstává přibližně stejná. Hodnota maximální polohové odchylky v části s vlícovacími body činí 8 mm. Zhoršení přesnosti v závislosti na vzdálenosti od této oblasti je pozvolné. Linie bodů přímo nad touto oblastí dokonce vykazuje nejvyšší přesnost. Na nejvyšší linii však již lze sledovat zvýšenou nepřesnost ve směru osy Y fotoplán se zmenšuje. Maximální polohová odchylka zde činí 1,5 cm. Graf je uveden v příloze N. Varianta c) Při umístění vlíc. bodů ve spodní třetině je snížení přesnosti z grafu dobře patrné. Horní část fotoplánu ujíždí do levé strany a zmenšuje se. Kupodivu maximální polohová odchylka má stejnou hodnotu jako v předchozím případě 1,5 cm. Nyní se ovšem snížení přesnosti týká téměř celé horní poloviny, která má průměrnou polohovou odchylku 1,1 cm. V případě a činila tato odchylka 5 mm a v případě b činila 6 mm. Graf je uveden v příloze O. 31
33 Zhodnocení: Při použitém širokoúhlém objektivu lze sledovat jistou podobnost s testováním způsobů odstranění distorze. Při umístění vlíc. bodů ve dvou třetinách testovacího pole se výsledná přesnost podobá fotoplánu při odstranění distorze pomocí SW ShiftN. Pokud použijeme body pouze ve třetině, podobá se přesnost fotoplánu bez odstranění distorze. Pro vyhodnocení byly zhotoveny spojnicové grafy, kde jsou vyneseny průměrné polohové odchylky bodů v jednotlivých liniích testovacího pole. Před tvorbou grafů byl eliminován vliv nepřesného geodetického zaměření odečtením souřadnicových rozdílů pořízených při tvorbě nejpřesnějšího fotoplánu (f = 24 mm, 6 vlícovacích bodů po celé ploše). Dobře je postup znatelný na grafu 5.2. Test - F=16 mm, 6 bodů polohová odchylka [m] 0,090 0,080 0,070 0,060 0,050 0,040 0,030 0,020 0,010 0, ,5 5 7, ,5 15 celá dvě třetiny třetina Osa Y[m] Graf 5.1 Testování vlivu konfigurace vlícovacích bodů pro f = 16 mm a 6 vlíc. bodů Z grafu je dobře znatelné zlepšení přesnosti při hustějším použití vlícovacích bodů. Podle grafu lze odhadnout, že při rozmístění vlícovacích bodů v polovině fotoplánu je přesnost na okraji fotoplánu dvakrát horší. Ve větší vzdálenosti však přesnost rychle klesá. Při užití bodů v jedné třetině vzrostla průměrná polohová odchylka až na 8 cm. 32
34 Test - F = 24 mm, 6 bodů Polohová odchylka [m] 0,012 0,010 0,008 0,006 0,004 0,002 0, ,5 5 7, ,5 15 Osa Y[m] celá dvě třetiny třetina Graf 5.2 Testování vlivu konfigurace vlícovacích bodů pro f = 24 mm a 6 vlíc. bodů Při nastavení zoomu na hodnotu f = 24 mm není zhoršení přesnosti při použití vlíc. bodů jen v části fotoplánu tak velké. Při této přesnosti již hraje vliv i přesnost odečtení bodů. Přesnost odečtených souřadnic z referenčního fotoplánu odhaduji na 3 mm. Využijeme-li při transformaci body ve dvou třetinách testovacího pole, sníží se přesnost na nejvyšší časti fotoplánu na 6 mm. To činí dvojnásobek oproti původní přesnosti. Pokud použijeme body ve třetině, je snížení přesnosti čtyřnásobné Použity 4 body pro transformaci V programu SIMphoto byly vytvořeny série fotoplánů pro konstanty komory f = 16 mm a f = 24 mm. Jedna série obsahuje fotoplány vytvořené pomocí čtyř vlícovacích bodů rozmístěných: a) po celém testovacím poli b) ve dvou třetinách testovacího pole c) v třetině testovacího pole d) v šestině testovacího pole Z každého fotoplánu byly odečteny souřadnice bodů testovacího pole. V SW Microsoft Excel byly vypočteny souřadnicové rozdíly mezi geodetickým zaměřením a těmito odečtenými souřadnicemi. Rozdíly byly vyneseny do přehledných grafů, které jsou uvedeny v příloze (viz dále). 33
35 Výsledky: f = 16 mm Varianta a) Přesnost fotoplánu při použití čtyř vlícovacích bodů je mírně nižší než při použití šesti bodů. Vytvořený graf potvrzuje, že kalibrace byla mírně přehnaná. Vektory, které směřují směrem do středu snímku jsou mírně protažené. Maximální polohová odchylka je 2 cm a průměrná polohová odchylka je 1 cm. Graf je uveden v příloze J. Varianta b) Při použití vlíc. bodů ve dvou třetinách testovacího pole byla zvýšena přesnost v této části fotoplánu. V oblasti nad vlícovacími body je znatelné rozšiřování fotoplánu do stran. Dále je zde patrné zmenšování fotoplánu v ose Y. Největší nepřesnosti jsou v rozích fotoplánu. Zde je i maximální polohová odchylka 4,7 cm. Nepřesnost je tedy více než dvakrát vyšší. Graf je uveden v příloze K. Varianta c) V případě, kdy jsou vlíc. body umístěny ve třetině testovacího pole, je již požito při vynášení vektorů v grafu menší měřítko. Fotoplán se roztahuje především do levé strany a smršťuje se ve směru osy Y. Nepřesnost fotoplánu v každé vyšší řadě testovacího pole je znatelně vyšší. Nejvyšší dosaženou polohovou odchylkou je 9,4 cm. To přibližně odpovídá přesnosti při použití šesti vlíc. bodů viz případ f = 24mm - varianta c) a příloha I. Graf je uveden v příloze L. Varianta d) V tomto případě byly použity pro transformaci pouze čtyři body v levém dolním rohu. Z grafu vidíme, jak se přesnost s výškou bodu na fotoplánu rapidně snižuje. Maximální polohová odchylka je pochopitelně na bodě v pravém horním rohu a činí 20 cm. Graf je uveden v příloze M. f = 24 mm Varianta a) Fotoplán vytvořený pomocí čtyř vlícovacích bodů se téměř neliší od grafu vytvořeného pomocí šesti vlíc. bodů. Z toho lze usoudit, že provedená kalibrace měla vyšší přesnost, než lze pomocí použitého geodetického zaměření určit. Graf je uveden v příloze P. Varianta b) Při porovnání tohoto grafu s grafem z předchozího případu vidíme vliv jednoho špatně sejmutého bodu 121 na celý fotoplán. Zde je vidět nevýhoda použití pouze čtyř vlícovacích bodů, kdy nedochází k vyrovnání. Je zde možné sledovat nízkou 34
36 přesnost v dolní části plánu i snižování přesnosti v důsledku chybějících vlíc. bodů v horní části. To je vidět na bodě č. 134, kde je zjištěna polohová odchylka 15 mm. Paradoxně způsobila nepřesnost bodu 121 zvýšení přesnosti v levé horní části fotoplánu. Fotoplán se smršťuje. Graf je uveden v příloze Q. Varianta c) Bohužel není pro vytvoření grafu popisujícího přesnost fotoplánu vytvořeného pomocí čtyř vlíc. bodů umístěných ve třetině vhodné ani jedno z měřítek grafů použitých v této práci. Je zde možné sledovat roztahování fotoplánu ve směru osy Y a do levé strany. Maximální zjištěná hodnota polohové odchylky je 4,5 cm. Graf je uveden v příloze R. Varianta d) Při použití vlíc. bodů v levé dolní šestině se přesnost dále zhoršuje. Rozpínání fotoplánu v horní části je výraznější. Maximální polohová odchylka činí 5,1 cm. Graf je uveden v příloze S. Zhodnocení: Při použití pouze čtyř vlícovacích bodů není možná kontrola pomocí oprav v transformační tabulce. Pokud je tedy geodetické zaměření vlícovacích bodů nepřesné, je výrazně zhoršena přesnost celého fotoplánu. Pro znehodnocení fotoplánu stačí nepřesnost určení jednoho bodu. Důkazem je výrazný rozdíl mezi grafy při použití objektivu f = 24 mm a umístění vlíc. bodů ve dvou třetinách fotoplánu. Při použití šesti vlíc. bodů je přesnost mnohem vyšší než u čtyř bodů. Při použití dobře kalibrovaného snímku pro tvorbu fotoplánu není počet vlícovacích bodů důležitý (uvažujeme-li přesné geodetické určení vlíc. bodů). U fotoplánu při použití snímku pořízeného širokoúhlým objektivem, kde zůstala zbytková distorze, další vlícovací body tuto chybu mírní pomocí vyrovnání. Změna počtu vlícovacích bodů neměla velký vliv na přesnost oblastí bez vlíc. bodů. Výjimkou je situace s konstantou komory f = 24 a body ve třetině fotoplánu (viz přílohy O a R). V tomto případě přičítám výrazný rozdíl přesnosti zvýšení počtu bodů o bod 112, který je přímo v horní řadě a jeho poloha je zřejmě posunuta v ose Y. Ve spojnicových grafech uvedených níže je dobře viditelný dopad umístění vlíc. bodů pouze v části fotoplánu. Křivky průměrných polohových odchylek mají průběh podobný exponenciální křivce. 35
37 Před tvorbou grafů byl eliminován vliv nepřesného geodetického zaměření odečtením souřadnicových rozdílů pořízených při tvorbě nejpřesnějšího fotoplánu (f = 24 mm, 6 vlícovacích bodů po celé ploše). V grafech byla hodnocena průměrná polohová odchylka v krajní linii bodů testovacího pole. Jsou to přibližně odhadnuté hodnoty ze spojnicových grafů (viz str. 32, 33, 36 a 37). Násobky odchylek jsou odvozeny od průměrných hodnot z pole pokrytého vlícovacími body: 1) vlícovací body ve dvou třetinách fotoplánu dvojnásobná odchylka 2) vlícovací body v polovině fotoplánu trojnásobná odchylka 3) vlícovací body v třetině fotoplánu osminásobná odchylka Je ovšem velký rozdíl, v jakých hodnotách jsou v těchto grafech průměrné polohové odchylky. Přesnost (tj. vliv odstranění distorze) původního snímku má obrovský vliv na výsledný fotoplán. Pro dobře kalibrovaný snímek s f = 24 mm byla i při použití vlíc. bodů pouze v šestině pole dosažena v nejvyšší řadě průměrná polohová odchylka 3,7 cm. Dalšího vylepšení by mohlo být dosaženo snad pouze lepší konfigurací při pořizování snímku. Pro konstantu komory f = 16 mm je za použití stejných vlícovacích bodů přesnost fotoplánu významně horší. Test - F = 16 mm, 4 body Polohová odchylka[m] 0,18 0,16 0,14 0,12 0,1 0,08 0,06 0,04 0,02 0 0,0 2,5 5,0 7,5 10,0 12,5 15,0 Osa Y [m] celá dvě třetiny třetina šestina Graf 5.3 Testování vlivu konfigurace vlícovacích bodů pro f = 16 mm a 4 vlíc. body 36
38 Test F = 24 mm, 4 body Polohová odchylka [m] 0,040 0,035 0,030 0,025 0,020 0,015 0,010 0,005 0, ,5 5 7, ,5 15 celá dvě třetiny třetina šestina Osa Y[m] Graf 5.4 Testování vlivu konfigurace vlícovacích bodů pro f = 24 mm a 4 vlíc. body 5.5 Vliv použité konstanty komory V průběhu celého testování byly použity dva snímky. Jeden snímek byl pořízen s konstantou komory nastavenou na hodnotu 16 mm a druhý na 24 mm. Pro oba snímky bylo provedeno testování způsobů odstranění distorze. Pro f = 16 mm bylo vyzkoušeno odstranění distorze pomocí SW ShiftN. Tím bylo dosaženo na použitém testovacím poli při použitých 6 vlícovacích bodech maximální polohové odchylky 3 cm. Takto lze i při nastavení zoomu do širokoúhlé polohy snadno odstranit distorzi objektivu znatelnou pouhým okem. Při nastavení zoomu na hodnotu f = 24 mm dosahuje snímek přesnosti, kdy už opravu distorze nelze opticky určit. Druhým způsobem odstranění distorze byla korektní kalibrace v programu PhotoModeler a následná úprava podle kalibračního protokolu v SW SIMphoto. Pro nastavení zoomu na do širokoúhlé polohy tak byla maximální polohová odchylka snížena na 1,8 cm (tj. 6 VB, celé pokrytí viz příloha F). Přesnost kalibrace druhého snímku (tj f = 24 mm, 6 VB, celé pokrytí) nelze použitou metodou určit. Takto provedená kalibrace má vyšší přesnost, neumožňuje podchytit geodetické zaměření bodů testovacího pole. 37
39 V průběhu dalšího testování je zřetelné, že přesnost kalibrace velice ovlivňuje přesnost výsledného fotoplánu. Použitím vlícovacích bodů pouze v části fotoplánu se umocňuje chyba v částech bez vlíc. bodů. Použitý objektiv má tedy obrovský vliv na přesnost kalibrovaného snímku a tím i výsledného fotoplánu. 38
40 6 Závěr Bylo provedeno testování různých vlivů na přesnost při tvorbě fotoplánu. Testování bylo provedeno na základě geodeticky zaměřeného testovacího pole. V průběhu testování bylo vytvořeno 17 fotoplánů z kterých byly odečteny souřadnice 35 bodů testovacího pole (595 odečtených bodů). Fotoplány byly vytvořeny v SW SIMphoto. Ze souřadnic získaných z fotoplánu a ze souřadnic určených geodeticky byly vytvořeny souřadnicové rozdíly. Ty byly vyneseny do grafů, které jsou součástí přílohy. Pomocí této vizualizace byly výsledky zhodnoceny. Nositelem přesnosti při tvorbě fotoplánu objektu bez hloubkového členění je určení radiální distorze a její odstranění. Zlepšení přesnosti tedy můžeme dosáhnout použitím co nejvhodnějšího objektivu a přesnou kalibrací ve vhodném softwaru. Při dostatečném pokrytí vlícovacími body lze dosáhnout přesnosti v jednotkách milimetru. Této přesnosti bylo dosaženo při použití objektivu s konstantou komory 24 mm a odstranění distorze pomocí kalibrace v programu PhotoModeler a úpravě snímku podle kal. protokolu v SW SIMphoto. Rozmístění a počet použitých bodů při transformaci má vliv především při nedostatečné kalibraci vstupního snímku. Při přesné kalibraci a přesném geodetickém určení vlícovacích bodů lze vliv počtu a konfigurace vlíc. bodů celkem úspěšně eliminovat. Dalším důležitým faktorem je konfigurace při pořizování snímku. Ideální je snímek s kolmou osou na plochu objektu, kdy osa záběru jej protíná v jeho středu. Testování vlivu konfigurace snímku není předmětem této bakalářské práce. Největšími komplikacemi při práci bylo odečítání souřadnic, kdy bylo nutné přepočítávat dlaždice pro odečet správného bodu. Další komplikací byla nižší přesnost geodetického zaměření, než je přesnost nejpřesnějších fotoplánů. Přesto bylo vždy možné vyvodit důvěryhodné závěry. Práce splnila stanovené cíle a zjištěné informace v celku potvrdily teoretické předpoklady. 39
41 7 Seznam použité literatury [1] PAVELKA, Karel. Fotogrammetrie 1. únor 2009, ČVUT Praha, 200 s. ISBN [2] KULÍK, Tomáš. Fotogrammetrická dokumentace části sálu komendy v Českém Dubu. Praha, s. Bakalářská práce, ČVUT, Fakulta stavební [3] Nová poloprofi třída: Canon EOS 5D Mark II.[online]. [cit ]. Dostupné z WWW: < [4] Totální stanice Trimble [online]. [cit ]. Dostupné z WWW: < [5] Trimble 3600 Series. [online]. [cit ]. Dostupné z WWW: % %20ver0400%20ENG.pdf simphoto [6] SIMphoto.. jednoduchá jednosnímková fotogrammetrie. [online]. [cit ]. Dostupné z WWW: 40
42 8 Seznam příloh A Seznam souřadnic rovina B Přehledka bodů testovacího pole C Přesnost zaměření bodů testovacího pole D Graf F = 16 bez kalibrace_6bodu_cela E Graf F = 24 bez kalibrace_6bodu_cela F Graf F = 16 kalibrace PhotoModeler G Graf F = 24 kalibrace PhotoModeler H Graf F = 16 kalibrace Shift CH Graf F = 16 kalibtace PM 6bodu_dve_tretiny I Graf F = 16 kalibtace PM 6bodu_tretina J Graf F = 16 kalibtace PM 4body_cela K Graf F = 16 kalibtace PM 4body_dve_tretiny L Graf F = 16 kalibtace PM 4body_tretina M Graf F = 16 kalibtace PM 4body_sestina N Graf F = 24 kalibtace PM 6bodu_dve_tretiny O Graf F = 24 kalibtace PM 6bodu_tretina P Graf F = 24 kalibtace PM 4body_cela Q Graf F = 24 kalibtace PM 4body_dve_tretiny R Graf F = 24 kalibtace PM 4body_tretina S Graf F = 24 kalibtace PM 4body_sestina T Seznam DVD příloh 41
43 Příloha A Seznam souřadnic bodů testovacího pole Y X ČB Y[m] X[m] 100 0,000 0, ,001 2, ,003 4, ,012 6, ,016 9, ,477-0, ,476 2, ,480 4, ,481 6, ,483 9, ,972 0, ,970 2, ,973 4, ,977 6, ,976 9, ,497-0, ,501 2, ,505 4, ,512 6, ,517 9, ,060-0, ,053 2, ,053 4, ,052 6, ,051 9, ,578 0, ,572 2, ,568 4, ,564 6, ,563 9, ,122 0, ,122 2, ,123 4, ,121 6, ,123 9,227 42
44 43
45 44
46 45
47 46
48 47
49 48
50 49
51 50
52 51
53 52
54 53
55 54
56 55
57 56
58 57
59 58
60 59
61 60
62 61
63 T Seznam příloh na DVD [I] Zaměření - měření4001.mes- měření na stanovisku měření4002.mes - měření na stanovisku protokoly složka s needitovanými protokoly z výpočtů (formát *.pro) [II] [III] Seznamy souřadnic - polarka4001.crd - polarka4002.crd - protínání z délek.crd - protínání z úhlů.crd - průměr.crd - sklopeno.crd rovinné souřadnice - test. pole.crd správné umístění počátku a souř. os Kalibrace PhotoModeler f=16mm snímky, kal. protokol, projekt - f=24mm snímky, kal. protokol, projekt [IV] Původní snímky - F= 16mm.jpg - F = 24mm.jpg - ShiftN.jpg snímek pro určení koeficientu distorze [V] [VI] Kalibrované snímky - kalibrovana16.jpg - kalibrovana24.jpg Testy -TEST_způsoby odstranění distorze F = 16mm - bez kal trans. tabulka, fotoplán, graf - kal PM trans. tabulka, fotoplán, graf - Shift trans. tabulka, fotoplán, graf - f=16_tabulka.xls -F = 24mm- bez kal trans. tabulka, fotoplán, graf - kal PM trans. tabulka, fotoplán, graf - f=16_tabulka.xls 62
64 - TEST_F16_počet a konfigurace VB -4body- cela - trans. tabulka, fotoplán, graf - dve tretiny - trans. tabulka, fotoplán, graf - tretina - trans. tabulka, fotoplán, graf - sestina - trans. tabulka, fotoplán, graf - F16_4body.xls -6bodu- cela - trans. tabulka, fotoplán, graf - dve tretiny - trans. tabulka, fotoplán, graf - tretina - trans. tabulka, fotoplán, graf - sestina - trans. tabulka, fotoplán, graf - F16_6bodu.xls - TEST_F24_počet a konfigurace VB -4body- cela - trans. tabulka, fotoplán, graf - dve tretiny - trans. tabulka, fotoplán, graf - tretina - trans. tabulka, fotoplán, graf - sestina - trans. tabulka, fotoplán, graf - F24_4body.xls -6bodu- cela - trans. tabulka, fotoplán, graf - dve tretiny - trans. tabulka, fotoplán, graf - tretina - trans. tabulka, fotoplán, graf - sestina - trans. tabulka, fotoplán, graf - F24_6bodu.xls [VII] Přehledka bodů testovacího pole.pdf [VIII] Přesnost zaměření bodů testovacího pole.pdf [IX] [X] Průměrné souřadnice bodů test. pole + přesnost zaměření.xls Bakalářská práce.pdf 63
Testování programu PhotoScan pro tvorbu 3D modelů objektů. Ing. Tomáš Jiroušek
 Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
Testování programu PhotoScan pro tvorbu 3D modelů objektů Ing. Tomáš Jiroušek Obsah Rozlišovací schopnost použitých fotoaparátů Kalibrace určení prvků vnitřní orientace Objekty pro testování Testování
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE PRAHA 2013 Martin Tröstl ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE Vedoucí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ DIPLOMOVÁ PRÁCE PRAHA 2013 Martin Tröstl ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE DIPLOMOVÁ PRÁCE Vedoucí
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MĚŘICKÝ SNÍMEK PRVKY VNITŘNÍ A VNĚJŠÍ ORIENTACE CHYBY SNÍMKU MĚŘICKÝ SNÍMEK Základem měření je fotografický snímek, který je v ideálním případě
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník JEDNOSNÍMKOVÁ FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY JEDNOSNÍMKOVÉ FTM Matematickým vyjádřením skutečnosti je kolineární transformace, ve které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny
 Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
Využití letecké fotogrammetrie pro sledování historického vývoje krajiny Jitka Elznicová Katedra informatiky a geoinformatiky Fakulta životního prostředí Univerzita J.E.Purkyně v Ústí nad Labem Letecké
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE
 ZÁKLADY FOTOGRAMMETRIE") SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník MATEMATICKÉ (OPTICKÉ) ZÁKLADY FOTOGRAMMETRIE MATEMATICKÉ ZÁKLADY FOTOGRAMMETRIE fotogrammetrie využívá ke své práci fotografické snímky, které
Přehled vhodných metod georeferencování starých map
 Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Přehled vhodných metod georeferencování starých map ČVUT v Praze, katedra geomatiky 12. 3. 2015 Praha Georeferencování historická mapa vs. stará mapa georeferencování umístění obrazu mapy do referenčního
Práce s texty, Transformace rastru, Připojení GPS
 Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Školení programu TopoL xt Práce s texty, Transformace rastru, Připojení GPS Obsah: 1. Uživatelské rozhraní (heslovitě, bylo součástí minulých školení) 2. Nastavení programu (heslovitě, bylo součástí minulých
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM
 Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
Fotogrammetrické 3D měření deformací dálničních mostů typu TOM Ing. Karel Vach CSc., s.r.o. Archeologická 2256, 155 00 Praha 5 http://www.eurogv.cz 1 Objekt SO 208 2 Technické zadání: - provést zaměření
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník RELATIVNÍ A ABSOLUTNÍ ORIENTACE AAT ANALYTICKÁ AEROTRIANGULACE PŘÍPRAVA STEREODVOJICE PRO VYHODNOCENÍ Příprava stereodvojice pro vyhodnocení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
Terestrické 3D skenování
 Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Cvičení software Groma základní seznámení
 Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Cvičení software Groma základní seznámení 4 2 3 1 Obr. 1: Hlavní okno programu Groma v.11. Hlavní okno 1. Ikony základních geodetických úloh, lze je vyvolat i z menu Výpočty. 2. Ikona základního nastavení
Rychlý manuál. pro uživatele softwaru Trimble ACCESS v totálních stanicích. Listopad 2015 MM
 Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
Rychlý manuál pro uživatele softwaru Trimble ACCESS v totálních stanicích Listopad 2015 MM Po zapnutí totální stanice se zobrazí výchozí okno softwaru Trimble ACCESS (TA) V záhlaví se zobrazuje uživatel
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin
 Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
Vliv realizace, vliv přesnosti centrace a určení výšky přístroje a cíle na přesnost určovaných veličin doc. Ing. Martin Štroner, Ph.D. Fakulta stavební ČVUT v Praze 1 Úvod Při přesných inženýrsko geodetických
PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP
 Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Digitální technologie v geoinformatice, kartografii a DPZ PROBLEMATICKÉ ASPEKTY GEOREFERENCOVÁNÍ MAP Katedra geomatiky Fakulta stavební České vysoké učení technické v Praze Jakub Havlíček, 22.10.2013,
Stereofotogrammetrie
 Stereootogrammetrie Princip stereoskopického vidění a tzv. yziologické paralaxy Paralaxa je relativní změna v poloze stacionárních objektů způsobená změnou v geometrii pohledu. horizontální yziologická
Stereootogrammetrie Princip stereoskopického vidění a tzv. yziologické paralaxy Paralaxa je relativní změna v poloze stacionárních objektů způsobená změnou v geometrii pohledu. horizontální yziologická
V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv.
 3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
3D FOTOGRAMMETRIE V poslední době se v oblasti dokumentace archeologických movitých i nemovitých památek začíná objevovat zcela nová, digitální metoda tzv. pozemní 3D fotogrammetrie. Jedná se o tvorbu
Laserové skenování (1)
") (1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
(1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy
 Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Centrum Digitální Optiky Meo S-H: software pro kompletní diagnostiku intenzity a vlnoplochy Výzkumná zpráva projektu Identifikační čí slo výstupu: TE01020229DV003 Pracovní balíček: Zpracování dat S-H senzoru
Digitální kartografie 3
 Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
Digitální kartografie 3 základy práce v ESRI ArcGIS strana 2 Založení nového projektu v aplikaci ArcMap 1. Spuštění aplikace ArcMap v menu Start Programy ArcGIS. 2. Volba Blank map pro založení nového
SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE
 SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE (Řešení kruţnicových oblouků v souřadnicích) 3. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec 2015
SYLABUS 9. PŘEDNÁŠKY Z INŢENÝRSKÉ GEODÉZIE (Řešení kruţnicových oblouků v souřadnicích) 3. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec 2015
SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS
 SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS NIVELACE - úvod NIVELACE je měření výškového rozdílu od realizované (vytyčené) vodorovné roviny Provádí se pomocí
SPŠ STAVEBNÍ České Budějovice GEODÉZIE STA NIVELACE VÝŠKOVÉ MĚŘENÍ A VÝŠKOVÉ BODOVÉ POLE JS NIVELACE - úvod NIVELACE je měření výškového rozdílu od realizované (vytyčené) vodorovné roviny Provádí se pomocí
Měřická dokumentace používané metody
 Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
Měřická dokumentace používané metody Pod měřickou dokumentaci zahrnuji takové metody a postupy kde výstup vzniká na podkladě přesných měření. Přesněji řečeno měření prováděných metodami geodetickými nebo
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací
 Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací The two-step method calibration of digital camera utilizing non-linear transformation V. Obr, B. Koska* vitezslav.obr@fsv.cvut.cz
Dvoukroková metoda kalibrace digitální kamery s využitím nelineárních transformací The two-step method calibration of digital camera utilizing non-linear transformation V. Obr, B. Koska* vitezslav.obr@fsv.cvut.cz
Výuka v terénu I. Obory: Inženýrská geodézie a Důlní měřictví. Skupiny: GB1IGE01, GB1IGE02, GB1DME
 Výuka v terénu I Obory: Inženýrská geodézie a Důlní měřictví Skupiny: GB1IGE01, GB1IGE02, GB1DME01 27. 4-30. 4. 2015 1. Trojúhelníkový řetězec Zásady pro zpracování úlohy: Zaměřte ve skupinách úhly potřebné
Výuka v terénu I Obory: Inženýrská geodézie a Důlní měřictví Skupiny: GB1IGE01, GB1IGE02, GB1DME01 27. 4-30. 4. 2015 1. Trojúhelníkový řetězec Zásady pro zpracování úlohy: Zaměřte ve skupinách úhly potřebné
K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR
 K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR Vlastimil Kratochvíl * Příspěvek obsahuje popis vlastností některých postupů, využitelných pro transformaci souřadnic mezi geodetickými systémy
K metodám převodu souřadnic mezi ETRS 89 a S-JTSK na území ČR Vlastimil Kratochvíl * Příspěvek obsahuje popis vlastností některých postupů, využitelných pro transformaci souřadnic mezi geodetickými systémy
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE 2015 Alexander Vachuška ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE 2015 Alexander Vachuška ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
Popisná statistika. Komentované řešení pomocí MS Excel
 Popisná statistika Komentované řešení pomocí MS Excel Vstupní data Máme k dispozici data o počtech bodů z 1. a 2. zápočtového testu z Matematiky I v zimním semestru 2015/2016 a to za všech 762 studentů,
Popisná statistika Komentované řešení pomocí MS Excel Vstupní data Máme k dispozici data o počtech bodů z 1. a 2. zápočtového testu z Matematiky I v zimním semestru 2015/2016 a to za všech 762 studentů,
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Obsah. Základy práce s rastry. GIS1-5. cvičení. ČVUT v Praze, Fakulta stavební, katedra mapování a kartografie
 ČVUT v Praze, Fakulta stavební, katedra mapování a kartografie říjen 2010 Obsah prezentace 1 2 3 4 Měli bychom umět ovládat prostorové analýzy překryvné (overlay) a bĺızkostní (buffer) funkce umět kombinovat
ČVUT v Praze, Fakulta stavební, katedra mapování a kartografie říjen 2010 Obsah prezentace 1 2 3 4 Měli bychom umět ovládat prostorové analýzy překryvné (overlay) a bĺızkostní (buffer) funkce umět kombinovat
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2015 Cvičen ení č.. 1 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metodický pokyn. k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území
 Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
Ministerstvo zemědělství ČR Č.j.: 28181/2005-16000 Metodický pokyn k zadávání fotogrammetrických činností pro potřeby vymezování záplavových území Určeno: K využití: státním podnikům Povodí Zemědělské
Zaměření vybraných typů nerovností vozovek metodou laserového skenování
 Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
Zaměření vybraných typů nerovností vozovek metodou laserového skenování 1. Účel experimentů V normě ČSN 73 6175 (736175) Měření a hodnocení nerovnosti povrchů vozovek je uvedena řada metod k určování podélných
5.1 Definice, zákonné měřící jednotky.
 5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
5. Měření délek. 5.1 Definice, zákonné měřící jednotky. 5.2 Měření délek pásmem. 5.3 Optické měření délek. 5.3.1 Paralaktické měření délek. 5.3.2 Ryskový dálkoměr. 5.4 Elektrooptické měření délek. 5.4.1
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Pavel KAVÁLEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Studijní program: GEODÉZIE A KARTOGRAFIE Studijní obor:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Pavel KAVÁLEK ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ Studijní program: GEODÉZIE A KARTOGRAFIE Studijní obor:
K přesnosti volného stanoviska
 K přesnosti volného stanoviska MDT Doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Abstrakt Článek se zabývá rozborem přesnosti a vyvozením obecnějších závěrů pro přesnost určení souřadnic
K přesnosti volného stanoviska MDT Doc. Ing. Martin Štroner, Ph.D., ČVUT Fakulta stavební, Praha Abstrakt Článek se zabývá rozborem přesnosti a vyvozením obecnějších závěrů pro přesnost určení souřadnic
ení tvaru a polohy laserového svazku
 Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
Původní metoda určen ení tvaru a polohy laserového svazku dálkoměru Ing. Bronislav Koska prof. Ing. Jiří Pospíš íšil, CSc. Katedra speciáln lní geodézie Fakulta stavební ČVUT v Praze Obsah prezentace Úvod
DIGITÁLNÍ ORTOFOTO. SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník
 DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
DIGITÁLNÍ ORTOFOTO SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník DIGITÁLNÍ SNÍMEK Ortofotomapa se skládá ze všech prvků, které byly v době expozice přítomné na povrchu snímkované oblasti.
Metodika měření linearity CCD snímačů
 Metodika měření linearity CCD snímačů (test na plochu) Ver. 1.7 Zpracoval: Zdeněk Řehoř BRNO 2009 Metodika měření linearity CCD je určena pro stanovení závislosti odezvy senzorů na velikosti na detektor
Metodika měření linearity CCD snímačů (test na plochu) Ver. 1.7 Zpracoval: Zdeněk Řehoř BRNO 2009 Metodika měření linearity CCD je určena pro stanovení závislosti odezvy senzorů na velikosti na detektor
měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power
 CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
CC E V-STARS PRAHA člen skupiny měřicí technologie Optický hledáček Wi-Fi Kruhový interní blesk Spoušť Externí blesk Lasserová stopa Objektiv f=21mm Baterie Power Co je to V-STARS V-STARS (INCA3 camera)
Konverze grafických rastrových formátů
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Konverze grafických rastrových formátů semestrální práce Jakub Hořejší Ondřej Šalanda V
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Konverze grafických rastrových formátů semestrální práce Jakub Hořejší Ondřej Šalanda V
Kontrola svislosti montované budovy
 1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
1. Zadání Kontrola svislosti montované budovy Určete skutečné odchylky svislosti panelů na budově ČVUT. Objednatel požaduje kontrolu svislosti štítové stěny objektu. Při konstrukční výšce jednoho podlaží
Předloha č. 2 podrobné měření
 Předloha č. 2 podrobné měření 1. Zadání 2. Zápisník 3. Stručný návod Groma 4. Protokol Groma 5. Stručný návod Geus 6. Protokol Geus 7. Stručný návod Kokeš 8. Protokol Kokeš 1 Zadání 1) Vložte dané body
Předloha č. 2 podrobné měření 1. Zadání 2. Zápisník 3. Stručný návod Groma 4. Protokol Groma 5. Stručný návod Geus 6. Protokol Geus 7. Stručný návod Kokeš 8. Protokol Kokeš 1 Zadání 1) Vložte dané body
Digitální fotoaparáty a digitalizace map
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Digitální fotoaparáty a digitalizace map semestrální práce Martina Jíšová Petr Dvořák editor:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE Digitální fotoaparáty a digitalizace map semestrální práce Martina Jíšová Petr Dvořák editor:
Soubor programových modulů pro blízkou fotogrammetrii
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební katedra geomatiky Thákurova 7, 166 29 Praha 6 Soubor programových modulů pro blízkou fotogrammetrii Manuál k programu pro potlačení distorze objektivů
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební katedra geomatiky Thákurova 7, 166 29 Praha 6 Soubor programových modulů pro blízkou fotogrammetrii Manuál k programu pro potlačení distorze objektivů
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY
 APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
GEOREFERENCOVÁNÍ RASTROVÝCH DAT
 GEOREFERENCOVÁNÍ RASTROVÝCH DAT verze 1.0 autoři listu: Lukáš Brůha, video Jan Kříž Cíle V tomto pracovním listu se student: seznámí se základní koncepcí geometrické transformace souřadnicových systémů,
GEOREFERENCOVÁNÍ RASTROVÝCH DAT verze 1.0 autoři listu: Lukáš Brůha, video Jan Kříž Cíle V tomto pracovním listu se student: seznámí se základní koncepcí geometrické transformace souřadnicových systémů,
GEPRO řešení pro GNSS Leica
 GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
GEPRO řešení pro GNSS Leica GEPRO spol. s r. o. Ing. Jan Procházka GEPRO řešení pro GNSS Leica GNSS rover» odolný PC tablet s Win 7» GNSS anténa přes bluetooth» až 1 cm přesnost» KOKEŠ, MISYS, PROLAND
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Úlohy nad rastrovými daty Daniela
PROTOKOL O ZKOUŠCE 101 / 2009
 Doc. Ing. Jiří Plch, CSc., Světelná technika Brno IČ 181 42 443 PROTOKOL O ZKOUŠCE 101 / 2009 Předmět zkoušky : Zadavatel : Jasová analýza osvětlení vozovky svítidly se světelnými diodami iguzzini Objednávka
Doc. Ing. Jiří Plch, CSc., Světelná technika Brno IČ 181 42 443 PROTOKOL O ZKOUŠCE 101 / 2009 Předmět zkoušky : Zadavatel : Jasová analýza osvětlení vozovky svítidly se světelnými diodami iguzzini Objednávka
Modelování blízkého pole soustavy dipólů
 1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
DZDDPZ3 Digitální zpracování obrazových dat DPZ. Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava
 DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie
 4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie Podle orientace osy záběru dělíme snímky ve fotogrammetrii na snímky svislé (kolmé), šikmé, ploché a horizontální
4. Souřadnicové soustavy ve fotogrammetrii, vlivy působící na geometrii letecké fotografie Podle orientace osy záběru dělíme snímky ve fotogrammetrii na snímky svislé (kolmé), šikmé, ploché a horizontální
Fotogammetrie. Zpracoval: Jakub Šurab, sur072. Datum:
 Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
Fotogammetrie Zpracoval: Jakub Šurab, sur072 Datum: 7.4.2009 Co je fotogrammetrie Fotogrammetrie je věda, způsob a technologie, která se zabývá získáváním využitelných měření map, digitálních modelů a
Škola: Gymnázium, Brno, Slovanské náměstí 7 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Název projektu: Inovace výuky na GSN
 Škola: Gymnázium, Brno, Slovanské náměstí 7 Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Název projektu: Inovace výuky na GSN prostřednictvím ICT Číslo projektu: CZ.1.07/1.5.00/34.0940
Škola: Gymnázium, Brno, Slovanské náměstí 7 Šablona: III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Název projektu: Inovace výuky na GSN prostřednictvím ICT Číslo projektu: CZ.1.07/1.5.00/34.0940
Úvod. OLYMPUS Stream Rychlý návod k obsluze
 Upozornění * Podívejte se prosím na on-line nápovědu v návodu (help) softwaru, nastavení softwaru, kalibraci systému a podrobná nastavení.. *Tento návod k obsluze obsahuje základní funkce verze SW Start
Upozornění * Podívejte se prosím na on-line nápovědu v návodu (help) softwaru, nastavení softwaru, kalibraci systému a podrobná nastavení.. *Tento návod k obsluze obsahuje základní funkce verze SW Start
Gymnázium Vincence Makovského se sportovními třídami Nové Město na Moravě
 VY_32_INOVACE_INF_BU_02 Sada: Digitální fotografie Téma: Základy ovládání digitálního fotoaparátu Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití:
VY_32_INOVACE_INF_BU_02 Sada: Digitální fotografie Téma: Základy ovládání digitálního fotoaparátu Autor: Mgr. Miloš Bukáček Předmět: Informatika Ročník: 3. ročník osmiletého gymnázia, třída 3.A Využití:
6.1 Základní pojmy - zákonné měřící jednotky
 6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
6. Měření úhlů 6.1 Základní pojmy 6.2 Teodolity 6.3 Totální stanice 6.4 Osové podmínky, konstrukční chyby a chyby při měření 6.5 Měření úhlů 6.6 Postup při měření vodorovného úhlu 6.7 Postup při měření
MATEMATIKA základní úroveň obtížnosti
 MATEMATIKA základní úroveň obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 22 úloh. Časový limit pro
MATEMATIKA základní úroveň obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % 1 Základní informace k zadání zkoušky Didaktický test obsahuje 22 úloh. Časový limit pro
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Fyzikální praktikum FJFI ČVUT v Praze
 Fyzikální praktikum FJFI ČVUT v Praze Úloha 6: Geometrická optika Datum měření: 8. 4. 2016 Doba vypracovávání: 10 hodin Skupina: 1, pátek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: V přípravě
Fyzikální praktikum FJFI ČVUT v Praze Úloha 6: Geometrická optika Datum měření: 8. 4. 2016 Doba vypracovávání: 10 hodin Skupina: 1, pátek 7:30 Vypracoval: Tadeáš Kmenta Klasifikace: 1 Zadání 1. DÚ: V přípravě
Digitalizace starých glóbů
 Milan Talich, Klára Ambrožová, Jan Havrlant, Ondřej Böhm Milan.Talich@vugtk.cz 21. kartografická konference, 3. 9. - 4. 9. 2015, Lednice Cíle Vytvoření věrného 3D modelu, umožnění studia online, možnost
Milan Talich, Klára Ambrožová, Jan Havrlant, Ondřej Böhm Milan.Talich@vugtk.cz 21. kartografická konference, 3. 9. - 4. 9. 2015, Lednice Cíle Vytvoření věrného 3D modelu, umožnění studia online, možnost
Návod k použití softwaru Solar Viewer 3D
 Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
Návod k použití softwaru Solar Viewer 3D Software byl vyvinut v rámci grantového projektu Technologie a systém určující fyzikální a prostorové charakteristiky pro ochranu a tvorbu životního prostředí a
DronFest TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii
 TOPGEOSYS s.r.o. DronFest 2018 - TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii Ing. Václav Šafář,Ph.D. 1.června 2018 areál DEPO2015 TOPGEOSYS s.r.o. AUTORIZOVANÝ PRODEJ PHASEONE INDUSTRIAL PRO ČESKOU
TOPGEOSYS s.r.o. DronFest 2018 - TOPGEOSYS s.r.o. Kamery pro leteckou fotogrammetrii Ing. Václav Šafář,Ph.D. 1.června 2018 areál DEPO2015 TOPGEOSYS s.r.o. AUTORIZOVANÝ PRODEJ PHASEONE INDUSTRIAL PRO ČESKOU
Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy
 Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy Jakub Havlíček Katedra geomatiky Fakulta stavební ČVUT v Praze Dep. of Geomatics, www.company.com FCE Obsah 1. Vícelistová
Porovnání metod při georeferencování vícelistového mapového díla Müllerovy mapy Moravy Jakub Havlíček Katedra geomatiky Fakulta stavební ČVUT v Praze Dep. of Geomatics, www.company.com FCE Obsah 1. Vícelistová
Metoda Monte Carlo a její aplikace v problematice oceňování technologií. Manuál k programu
 Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE
 ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
ZAMĚŘENÍ FASÁD METODOU VÍCESNÍMKOVÉ POZEMNÍ FOTOGRAMMETRIE SFP Letecká a pozemní fotogrammetrie Radobyčická 10, Plzeň, ČR tel./fax 377 970 901, info@sfp-carto.cz Praxe prokázala, že oproti klasickým geodetickým
Nastavení TS Leica TS06 pro měření úhlů a délek
 Nastavení TS Leica TS06 pro měření úhlů a délek a) Tlačítka s fixní funkcí b) Navigační tlačítka c) ENTER d) ESC e) Funkční klávesy F1 až F4 f) Alfanumerická klávesnice Libelu a olovnici lze spustit tlačítky
Nastavení TS Leica TS06 pro měření úhlů a délek a) Tlačítka s fixní funkcí b) Navigační tlačítka c) ENTER d) ESC e) Funkční klávesy F1 až F4 f) Alfanumerická klávesnice Libelu a olovnici lze spustit tlačítky
Digitální fotoaparáty, základy digitální fotografie
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Digitální fotoaparáty, základy digitální fotografie Obsah Obsah...1 Digitální fotoaparáty...3 Základní rozdělení...3
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Digitální fotoaparáty, základy digitální fotografie Obsah Obsah...1 Digitální fotoaparáty...3 Základní rozdělení...3
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství. Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ. VOŠ a SŠS Vysoké Mýto leden 2008
 Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Přípravný kurz k vykonání maturitní zkoušky v oboru Dopravní stavitelství Ing. Pavel Voříšek MĚŘENÍ VZDÁLENOSTÍ VOŠ a SŠS Vysoké Mýto leden 2008 METODY MĚŘENÍ DÉLEK PŘÍMÉ (měřidlo klademe přímo do měřené
Laserový skenovací systém LORS vývoj a testování přesnosti
 Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
Laserový skenovací systém LORS vývoj a testování přesnosti Ing. Bronislav Koska Ing. Martin Štroner, Ph.D. Doc. Ing. Jiří Pospíšil, CSc. ČVUT Fakulta stavební Praha Článek popisuje laserový skenovací systém
KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY
 KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY K1655_CMYK.indd 35 10.3.2009 13:41:01 Podkladové fotografie jsou alfou a omegou pro vytváření panoramatických záběrů Proces tvorby digitálních panoramat začíná
KAPITOL A 3 FOTO GRAFUJEME PODKL AD OVÉ SNÍMKY K1655_CMYK.indd 35 10.3.2009 13:41:01 Podkladové fotografie jsou alfou a omegou pro vytváření panoramatických záběrů Proces tvorby digitálních panoramat začíná
Popisná statistika kvantitativní veličiny
 StatSoft Popisná statistika kvantitativní veličiny Protože nám surová data obvykle žádnou smysluplnou informaci neposkytnou, je žádoucí vyjádřit tyto ve zhuštěnější formě. V předchozím dílu jsme začali
StatSoft Popisná statistika kvantitativní veličiny Protože nám surová data obvykle žádnou smysluplnou informaci neposkytnou, je žádoucí vyjádřit tyto ve zhuštěnější formě. V předchozím dílu jsme začali
První piloti, navigátoři a letečtí fotografové. Obsah přednášky: Moderní technologie v geodézii a jejich využití v KN
 Moderní technologie v geodézii a jejich využití v KN (1) Moderní technologie v geodézii a jejich využití v KN DPLS a integrace nových měřických postupů Ing. Václav Šafář, VÚGTK, v.v.i., v vaclav.safar@vugtk.cz
Moderní technologie v geodézii a jejich využití v KN (1) Moderní technologie v geodézii a jejich využití v KN DPLS a integrace nových měřických postupů Ing. Václav Šafář, VÚGTK, v.v.i., v vaclav.safar@vugtk.cz
GEODÉZIE II. Metody určov. Geometrická nivelace ze středu. vzdálenost
 Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
Vysoká škola báňská technická univerzita Ostrava Hornicko-geologická fakulta Institut geodézie a důlního měřictví GEODÉZIE II 1. URČOV OVÁNÍ VÝŠEK Metody určov ování převýšení Geometrická nivelace Ing.
DIGITÁLNÍ FOTOGRAFIE
 DIGITÁLNÍ FOTOGRAFIE - princip digitalizace obrazu, části fotoaparátů, ohnisková vzdálenost, expozice, EXIF data, druhy digitálních fotoaparátů Princip vzniku digitální fotografie digitální fotoaparáty
DIGITÁLNÍ FOTOGRAFIE - princip digitalizace obrazu, části fotoaparátů, ohnisková vzdálenost, expozice, EXIF data, druhy digitálních fotoaparátů Princip vzniku digitální fotografie digitální fotoaparáty
Transformace dat mezi různými datovými zdroji
 Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
Staré mapy TEMAP - elearning
 Staré mapy TEMAP - elearning Modul 5 Digitalizace glóbů Ing. Markéta Potůčková, Ph.D. 2015 Přírodovědecká fakulta UK v Praze Katedra aplikované geoinformatiky a kartografie Motivace Glóby vždy byly a jsou
Staré mapy TEMAP - elearning Modul 5 Digitalizace glóbů Ing. Markéta Potůčková, Ph.D. 2015 Přírodovědecká fakulta UK v Praze Katedra aplikované geoinformatiky a kartografie Motivace Glóby vždy byly a jsou
7. Určování výšek II.
 7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
7. Určování výšek II. 7.1 Geometrická nivelace ze středu. 7.1.1 Princip geometrické nivelace. 7.1.2 Výhody geometrické nivelace ze středu. 7.1.3 Dělení nivelace dle přesnosti. 7.1.4 Nivelační přístroje.
Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena
 Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena Před spuštěním programu je dobré přepnout program do tzv.run Modu pomocí klávesové zkratky Ctrl+M, čímž se nám sníží zatížení
Příloha 1: Popis ovládání programu pro vyhodnocování chyb v pohybu vřetena Před spuštěním programu je dobré přepnout program do tzv.run Modu pomocí klávesové zkratky Ctrl+M, čímž se nám sníží zatížení
Měření deformací betonového nosníku III během zátěžové zkoušky. Deformation measurement of concrete beam III during a strain test
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 154 Katedra speciální geodézie Měření deformací betonového nosníku III během zátěžové zkoušky Deformation measurement of concrete beam III during a strain test bakalářská
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 154 Katedra speciální geodézie Měření deformací betonového nosníku III během zátěžové zkoušky Deformation measurement of concrete beam III during a strain test bakalářská
Tvorba rastrovej mapy III. vojenského mapovania územia Slovenska
 Výzkumný ústav geodetický, topografický a kartografický, v.v.i. Slovenská technická univerzita v Bratislave, Stavebná fakulta, Katedra geodetických základov Slovenská agentúra životného prostredia Tvorba
Výzkumný ústav geodetický, topografický a kartografický, v.v.i. Slovenská technická univerzita v Bratislave, Stavebná fakulta, Katedra geodetických základov Slovenská agentúra životného prostredia Tvorba
IVT. Rastrová grafika. 8. ročník
 IVT Rastrová grafika 8. ročník listopad, prosinec 2013 Autor: Mgr. Dana Kaprálová Zpracováno v rámci projektu Krok za krokem na ZŠ Želatovská ve 21. století registrační číslo projektu: CZ.1.07/1.4.00/21.3443
IVT Rastrová grafika 8. ročník listopad, prosinec 2013 Autor: Mgr. Dana Kaprálová Zpracováno v rámci projektu Krok za krokem na ZŠ Želatovská ve 21. století registrační číslo projektu: CZ.1.07/1.4.00/21.3443
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 2 Tvorba tematických
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 2 Tvorba tematických
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
3. Souřadnicové výpočty
 3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
Souřadnicové prostory
 Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Digitální fotografie. Mgr. Milana Soukupová Gymnázium Česká Třebová
 Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
Digitální fotografie Mgr. Milana Soukupová Gymnázium Česká Třebová Téma sady didaktických materiálů Digitální fotografie I. Číslo a název šablony Číslo didaktického materiálu Druh didaktického materiálu
4.1 Základní pojmy Zákonné měřicí jednotky.
 4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
4. Měření úhlů. 4.1 Základní pojmy 4.1.1 Zákonné měřicí jednotky. 4.1.2 Vodorovný úhel, směr. 4.1.3 Svislý úhel, zenitový úhel. 4.2 Teodolity 4.2.1 Součásti. 4.2.2 Čtecí pomůcky optickomechanických teodolitů.
CZ.1.07/2.2.00/28.0021)
") Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2014 Cvičen ení č.. 2 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Metody geoinženýrstv enýrství Ing. Miloš Cibulka, Ph.D. Brno, 2014 Cvičen ení č.. 2 Vytvořeno s podporou projektu Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Vytyčovací sítě. Výhody: Přizpůsobení terénu
 Typ liniové sítě záleží na požadavcích na přesnost. Mezi tyto sítě patří: polygonové sítě -> polygonový pořad vedený souběžně s liniovou stavbou troj a čtyřúhelníkové řetězce -> zdvojený polygonový pořad
Typ liniové sítě záleží na požadavcích na přesnost. Mezi tyto sítě patří: polygonové sítě -> polygonový pořad vedený souběžně s liniovou stavbou troj a čtyřúhelníkové řetězce -> zdvojený polygonový pořad
Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na. x 2 x 1
 Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Měřická dokumentace části zámku ve Chvatěrubech (okr. Mělník)
") ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra mapování a kartografie Měřická dokumentace části zámku ve Chvatěrubech (okr. Mělník) bakalářská práce Studijní program: Geodézie a kartografie
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta stavební Katedra mapování a kartografie Měřická dokumentace části zámku ve Chvatěrubech (okr. Mělník) bakalářská práce Studijní program: Geodézie a kartografie
Podrobné polohové bodové pole (1)
") Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání
Podrobné polohové bodové pole (1) BUDOVÁNÍ NEBO REVIZE A DOPLNĚNÍ PODROBNÉHO POLOHOVÉHO BODOVÉHO POLE Prohloubení nabídky dalšího vzdělávání v oblasti Prohloubení nabídky zeměměřictví dalšího vzdělávání