Aplikace robotiky v biomedicíně. Ing. Adam Chromý
|
|
|
- Aleš Bárta
- před 6 lety
- Počet zobrazení:
Transkript
1 Ing. Adam Chromý
2 Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti 2. Přehled robotů v lékařství přehled robotických systémů v dnešním lékařství, jejich funkce, vlastnosti a výhody a nevýhody 3. Vývoj robotů pro biomedicínu obecný postup při návrhu nových robotů, hledání příležitostí, mezioborová spolupráce 4. Biomedicínská robotika na našem pracovišti představení našich projektů - Robotický 3D skener a měřicí balanční plošina pro fyzioterapii 2/78
3 Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti 2. Přehled robotů v lékařství přehled robotických systémů v dnešním lékařství, jejich funkce, vlastnosti a výhody a nevýhody 3. Vývoj robotů pro biomedicínu obecný postup při návrhu nových robotů, hledání příležitostí, mezioborová spolupráce 4. Biomedicínská robotika na našem pracovišti představení našich projektů - Robotický 3D skener a měřicí balanční plošina pro fyzioterapii 3/78

 první nápady")
4 Počátky lékařské robotiky století snaha o vytvoření umělého člověka spíše hříčky pro přilákání pozornosti 19. století s rozvojem industrializace (parní stroj) první nápady na užití robotiky v lékařství nebyli schopni své nápady realizovat 4/78
5 Počátky lékařské robotiky 1. pol. 20. století GE Yes-Man, 1956 objevují se první praktické aplikace první teleoperátory stroje pro vykonávání činnosti na dálku vyvíjeny původně pro atomový průmysl začaly se užívat pro manipulaci s nakažlivými a toxickými materiály 5/78





6 Počátky lékařské robotiky GE Yes-Man, pol. 20. století činnosti na dálku Vizualizace vjemů pro vyvíjeny původně atomový průmysl začaly se užívat pro Snímání manipulaci spohybů nakažlivými a toxickými materiály Komunik. kanál objevují se první Teleoperátory praktické aplikace stroje bez umělé inteligence první teleoperátory zprostředkovávají dálkové vnímání a působení stroje pro vykonávání Snímání vjemů Silové působení 6/78
7 Počátky lékařské robotiky 1. pol. 20. století GE Yes-Man, 1956 objevují se první praktické aplikace první teleoperátory stroje pro vykonávání činnosti na dálku vyvíjeny původně pro atomový průmysl začaly se užívat pro manipulaci s nakažlivými a toxickými materiály 7/78


8 Počátky lékařské robotiky GE Yes-Man, 1956 MASCOT, /78

 začaly se využívat pro")
9 Počátky lékařské robotiky 2. pol. 20. století bouřlivý rozvoj lékařské robotiky první průmyslové roboty stále bez UI, ale realizují předepsaný program, který lze lehce přeprogramovat na rozdíl od teleoperátorů není potřeba operátor vyvinuty pro urychlení výroby aut v General Motors (UNIMATE, 1961) začaly se využívat pro automatizaci rutinních úkolů při přípravě léků (míchání, vážení, manipulace) 9/78


10 Počátky lékařské robotiky elektrické invalidní vozíky první kolečková křesla se objevují v 6 stol. př. n. l. na čínských malbách první elektricky poháněné vozíky až v roce 1953 (G. Klein, Kanada) robotické exoskelety vnější kostra se silovými aktuátory umožňuje zvýšit sílu nebo umožnit pohyb postižených končetin první exoskelet Hardiman v roce 1960 (General Electric, USA) 10/78
 vnitřní oblek měří")


11 Počátky lékařské robotiky Hardiman násobič síly (25x) vnitřní oblek měří mech. napětí tenzometry vnější oblek pomocí motorů realizuje nás. sílu velká hmotnost (2x co uzvedne) velká časová odezva malá rychlost chůze neúspěšný 11/78


12 Počátky lékařské robotiky chirurgické roboty robot asistuje operatérovi, který jej ovládá v reálném čase první chirurg. robot Heartthrob, 1983 (Kanada) rehabilitační roboty (1989) pro pacienty s nervovým postižením pomáhá jim ve cvičení nervového systému (princip adaptivity) 12/78
 se přechází spíše k jednoúčelovým")


13 Současný stav od vývoje univerzálních prostředků (exoskelety) se přechází spíše k jednoúčelovým univerzální složité roboty vs. efektivní jednoúčelové převládá spíše inovace a vylepšování stávajících aplikací než vývoj zcela nových pokrok brzdí velká byrokracie certifikace, zájem velkých firem o co největší složitost Simple Robot 13/78

14 Trendy do budoucnosti očekává se velká revoluce v souvislosti s rozvojem nanověd není však nic jisté nanorobotická cílená distribuce léčiv rakovina nanorobotické chirurgické operace menší invaze nanorobotické čištění cév snížení rizika infarktu... i v makrosvětě je velký prostor pro nová zařízení zdravotnictví má velké rezervy co se týče optimality zdravotnické péče rozvoj v této oblasti je brzděn neznalostí mezi obory 14/78
15 Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti 2. Přehled robotů v lékařství přehled robotických systémů v dnešním lékařství, jejich funkce, vlastnosti a výhody a nevýhody 3. Vývoj robotů pro biomedicínu obecný postup při návrhu nových robotů, hledání příležitostí, mezioborová spolupráce 4. Biomedicínská robotika na našem pracovišti představení našich projektů - Robotický 3D skener a měřicí balanční plošina pro fyzioterapii 15/78
 ne příliš nákladné vybavení nevýhody: 2D pohled přes kamery těžký pohyb s nástroji => velké nároky na zkušenost chirurga omezený výhled => riziko poranění okolních")
16 Laparoskopie princip: výhody: minimální invazivnost operace => menší krvácení, bolest, rychlejší hojení, menší rizika (např. infekce) ne příliš nákladné vybavení nevýhody: 2D pohled přes kamery těžký pohyb s nástroji => velké nároky na zkušenost chirurga omezený výhled => riziko poranění okolních struktur 16/78

 systém Da Vinci")
17 Chirurgické roboty funkce silového děliče umožňuje mikroposuvy a přesné pohyby ovládání pohyby jako u klasické operace nebo přes PC (joysticky) systém Da Vinci 17/78
18 Chirurgické roboty Robotický systém Da Vinci pův. pro US Army jeden chirurg pro více letadlových lodí princip: výhody: chirurg není stresován nemusí stát, může v klidu sedět vyšší přesnost pozicování nástroje => minimální invazivnost operace => menší krvácení, bolest, rychlejší hojení, menší rizika třetí ruka, kontrola zanoření nástroje, zoom,... => kvalitnější výkon SW omezení prudkých pohybů, apod. => vyšší bezpečnost možnost operace na dálku (ne příliš časté) nevýhody: cena systému 45 mil. Kč + každá nástroj 100 tis. Kč => 9 v ČR 18/78

19 Invalidní vozíky princip teleoperátorů dálkově ovládané vozítko problém s podvozky neexistuje univerzální podvozek diferenciální: jednoduché, dobrá manipulovatelnost, jen rovina Ackermanův: složitější, horší manipulovatelnost, i do terénu všesměrová kola: může jet všemi směry + rotovat, jen rovina, nečistoty hybridní robotické podvozky: 19/78






20 Invalidní vozíky 20/78
")

21 Robotické exoskelety silový násobič nebo dálkově ovládaný (jako invalidní vozík) praktické využití: zvedání pacientů v nemocnici rehabilitace končetin umožnění chůze nemohoucím 21/78

 nevýhody: stále ještě příliš drahé pro masové použití napojení")
22 Umělé robotické končetiny náhrada chybějících končetin DARPA projekt => 100 mil. USD snaha o napojení na nerv. syst. ovládání ruky na dobré úrovni problémy se snímači tlak, teplota ukázka: Youtube (2:00 a 4:43) nevýhody: stále ještě příliš drahé pro masové použití napojení stroj/člověk velmi křehké nemožnost použití v běžném prostř. 22/78




23 Rehabilitační kybernetika Rehabilitační robotika roboty jsou využity jako pomůcka pro rehabilitaci převážně exoskelety ovládané pacientem, s pevným programem, ovládané fyzioterapeutem Zpětnovazební pomůcky ovládání her cíleným pohybem lidského těla hra kuličky v bludišti, balanční deska,... 23/78
")
24 Stomatologický robot Stomatologický 3D robot CEREC ušetří se čas, náhrada je přesnější a estetičtější zaměření zubní čelisti a tvorba 3D modelu modelování nového zubu frézování zubu z keramického bločku implantace zubu ukázka: Youtube (od času 1:50) 24/78
")

25 Manipulátory a teleoperátory teleoperační manipulátory manipulátory řízené dálkově v reálném čase pro manipulaci s nebezpečným (dynamické rentgeny) nebo nakažlivým materiálem (infikované tkáně) Průmyslové roboty pro automatizaci rutinních úkonů (výroba léků, biochemické analýzy, histologické rozbory) 25/78


26 Další aplikace robotiky Pomocné roboty robotická sestra podávání nástrojů, ovládané hlasem RIBA II zvedač a přenášeč paceintů v nemocnicích MySpoon krmení pacientů bez rukou exoskelety pro zvedání pacientů v nemocnicích a mnoho dalších... 26/78
27 Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti 2. Přehled robotů v lékařství přehled robotických systémů v dnešním lékařství, jejich funkce, vlastnosti a výhody a nevýhody 3. Vývoj robotů pro biomedicínu obecný postup při návrhu nových robotů, hledání příležitostí, mezioborová spolupráce 4. Biomedicínská robotika na našem pracovišti představení našich projektů - Robotický 3D skener a měřicí balanční plošina pro fyzioterapii 27/78

28 Pokrok ve zdravotnictví Snaha o vyléčení nevyléčitelného nové nástroje a procedury nové léky a terapie rozšiřuje oblast vyléčitelnosti Optimalizace léčebných procesů nové přístupy a způsoby nové metody nové nástroje zkracuje cestu k vyléčení 28/78

29 Pokrok ve zdravotnictví Snaha o vyléčení nevyléčitelného nové nástroje a procedury nové léky a terapie rozšiřuje oblast vyléčitelnosti Mezioborová spolupráce Optimalizace léčebných procesů lékař ví co je potřeba, ale neví jak nové přístupy a způsoby technik ví jak, ale neví co je potřeba nové metody výrazně ovlivňuje rychlost pokroku nové nástroje zkracuje cestu k vyléčení 29/78
30 Pokrok ve zdravotnictví Snaha o vyléčení nevyléčitelného nové nástroje a procedury nové léky a terapie rozšiřuje oblast vyléčitelnosti Optimalizace léčebných procesů nové přístupy a způsoby nové metody nové nástroje zkracuje cestu k vyléčení 30/78



31 Pokrok ve zdravotnictví Snaha o vyléčení nevyléčitelného Ukázka z praxe: vývoj robotického skeneru nové nástroje a procedury nové léky a terapie rozšiřuje oblast vyléčitelnosti Optimalizace léčebných procesů nové přístupy a způsoby nové metody nové nástroje zkracuje cestu k vyléčení 31/78

32 Pokrok ve zdravotnictví Snaha o vyléčení nevyléčitelného nové nástroje a procedury nové léky a terapie rozšiřuje oblast vyléčitelnosti Optimalizace léčebných procesů nové přístupy a způsoby nové metody nové nástroje zkracuje cestu k vyléčení 32/78
33 Případová studie Optimalizace procesu rekonvalescence pacienta po vážných zraněných nebo invazivních operacích. pro optimalizaci nutné kvantifikovat přínos léčby často velmi těžké jej kvantifikovat dotazníky, rozhovory velmi subjektivní = velký šum hledání objektivních parametrů měříme objem svalové hmoty a tvar svalu velmi malé přírůstky = nutné měřit velmi přesně srovnávání 3D modelů 33/78
34 Jak se to dělá dnes pomocí MRI je vytvořen 3D model z modelu se použije pouze povrch postižené části těla, vnitřní struktury jsou zbytečné na modelech měříme kvantitativní parametry rehabilitace srovnáváme tyto parametry v průběhu času 34/78
35 Jak se to dělá dnes pomocí MRI je vytvořen 3D model z modelu se použije pouze povrch postižené části těla, vnitřní struktury jsou zbytečné na modelech měříme kvantitativní parametry rehabilitace Velice drahé pořízení modelu srovnáváme tyto parametry v průběhu času Dlouhá doba skenování Blokování ostatních pacientů Nemožnost častého skenování 35/78

36 Projekt 3D skeneru laserový skener robotický manipulátor skenovaný objekt 36/78



37 Robotický 3D skener zařízení pro optické snímání povrchu těla neklade žádné speciální nároky na pacienta výstupem je 3D počítačový model 37/78
38 Parametry zařízení precizní komponenty: rozlišení výstupního obrazu desetiny až setiny milimetru robotické rameno: libovolná snímací trajektorie = zachycení detailů složitého povrchu výměnné skenery: vysoká flexibilita užití = jednoduše přizpůsobitelné konkrétní aplikaci optický princip: šetrný k pacientům, žádné přípravy pro snímání, žádné požadavky na pacienta i obsluhu 38/78
39 Srovnání s MRI několikanásobně nižší náklady (pořizovací i provozní) vyšší rozlišení při kratším skenovacím čase nulová zátěž pacienta a jednoduchá obsluha neblokujeme pacienty, kteří MRI potřebují 1 MRI1 Robotický 3D skener Pořizovací náklady od Kč cca Kč Cena snímku Kč cca 1 Kč Doba pořízení snímku min. 1 2 min. Rozlišení snímku až 0,5 mm 0,06 0,1 mm Výstupní model vnitřní struktury povrch objektu Zdroj: 39/78
40 Shrnutí případové studie Optimalizace léčebných procesů je neméně důležitý směr, kde je mnoho co dělat v konkrétním příkladu lékaři věděli, že proces není optimální, ale nevěděli, jak jej optimalizovat často však ani nevědí, že pracují neoptimálně důležitost mezioborové spolupráce komunikace s lékařskými odborníky jak se co dělá a hledání optimálnějšího řešení 40/78
41 Obsah přednášky 1. Historie aplikované robotiky v biomedicíně první robotické systémy v medicíně, první podpůrné prostředky, jejich vývoj v čase, současný stav a trendy do budoucnosti 2. Přehled robotů v lékařství přehled robotických systémů v dnešním lékařství, jejich funkce, vlastnosti a výhody a nevýhody 3. Vývoj robotů pro biomedicínu obecný postup při návrhu nových robotů, hledání příležitostí, mezioborová spolupráce 4. Biomedicínská robotika na našem pracovišti představení našich projektů - Robotický 3D skener a měřicí balanční plošina pro fyzioterapii 41/78



42 Robotický 3D skener laserový skener skenovaný objekt výsledný 3D model robotický manipulátor 42/78
43 Princip robotického 3D skeneru Měření vzdálenosti pomocí laserového řádkového snímače Pohyb se skenerem po předem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změřené vzdálenosti Stínovaný model povrchu snímaného objektu 43/78
44 Princip robotického 3D skeneru Měření vzdálenosti pomocí laserového řádkového snímače Pohyb se skenerem po předem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změřené vzdálenosti Stínovaný model povrchu snímaného objektu 44/78


45 Měření vzdálenosti Laserový skener scancontrol 2750 měřicí rozsah: mm délkové rozlišení: μm úhlové rozlišení: 0,019 snímací frekvence: až 2 khz hmotnost: 800g výstupem je sekvence vzdálenostních profilů: 45/78

46 Princip robotického 3D skeneru Měření vzdálenosti pomocí laserového řádkového snímače Pohyb se skenerem po předem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změřené vzdálenosti Stínovaný model povrchu snímaného objektu 46/78
 v = pitch (podle osy Y) w = yaw (podle osy X)")
47 Pohyb se skenerem Se skenerem je pohybováno po předem nadefinované trajektorii vlastní jednoduchý jazyk pro popis trajektorie zkompilováno do formy posloupnosti skenovacích pozic popsaných v 6 DOF: translace: x,y,z rotace: u,v,w u = roll (podle osy Z) v = pitch (podle osy Y) w = yaw (podle osy X) 47/78

48 Pohyb se skenerem Schéma hlavního mechanismu: 48/78
49 Princip robotického 3D skeneru Měření vzdálenosti pomocí laserového řádkového snímače Pohyb se skenerem po předem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změřené vzdálenosti Stínovaný model povrchu snímaného objektu 49/78

50 Výpočet polohy bodu Poloha je vypočtena postupným užitím několika homogenních transformací Transformace z nativních souřadnic robota a skeneru do výchozích souřadnic 50/78
51 Homogenní transformace 0 = výchozí souřadný systém M... manipulátor E... koncový bod manipulátoru S... laserový skener L... laserový dálkoměr 51/78
52 Homogenní transformace HSL: rotace kolem osy Z o úhel α = cos 8 sin 8 sin 8 cos 8 α... natočení rozmítacího systému laserového skeneru vůči ose x 52/78
 sin (xt) 53/78")
53 Homogenní transformace HES: translace a RPY rotace v 6DOF popisující umístění laserového skeneru na robotu = + + xt, yt, zt... ut... vt... wt... translace rotace roll rotace pitch rotace yaw cx... sx... cos (xt) sin (xt) 53/78
 sin (x) 54/78")
54 Homogenní transformace HME: translace a RPY rotace v 6DOF popisující pozici koncového bodu manipulátoru = + + x, y, z... translace u... rotace roll v... rotace pitch w... rotace yaw cx... sx... cos (x) sin (x) 54/78
55 Homogenní transformace H0M: translace a RPY rotace v 6DOF popisující pozici manipulátoru ve výchozím souř. systému Souřadný systém 0 je obvykle stejný jako je souřadný systém manipulátoru M. 55/78

56 Homogenní transformace Celková transformace H0L: kombinace jednotlivých homogenní transformací 0 = 0 56/78

57 Ukázka získaného mraku bodů 57/78
58 Princip robotického 3D skeneru Měření vzdálenosti pomocí laserového řádkového snímače Pohyb se skenerem po předem známé trajektorii pomocí robotického ramene Výpočet polohy bodu ze znalosti polohy ramene, natočení skeneru a změřené vzdálenosti Stínovaný model povrchu snímaného objektu 58/78


59 Stínované modely povrchu hledání trojúhelníků v mraku bodů pomocí Delaunayovy triangulace nebo pomocí postupného spojování zobrazení dat aplikace s užitím frameworku XNA 59/78
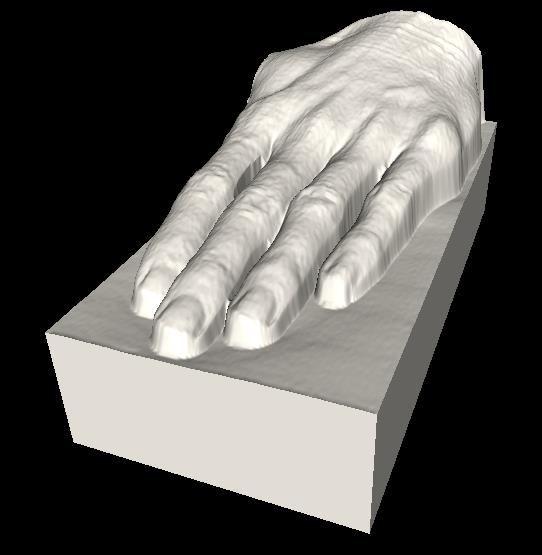

60 Ukázka výsledného modelu 60/78

61 Měřicí balanční plošina Obslužný SW inerciální snímač balanční plošina 61/78
62 Měřicí balanční plošina víceúčelová rehabilitační pomůcka diagnostická funkce: objektivní měření funkce stabilizačního systému pomocí nadefinovaných testů terapeutická funkce: pomocí hraní her vytváří pomocnou zpětnou vazbu, která pomáhá správně nastavit regulátor v mozku 62/78

63 Měřicí balanční plošina žádaná hodnota akční zásah regulační odchylka regulátor neelektrická výst. veličina soustava převodník elektrická výst. veličina 63/78
64 Měřicí balanční plošina žádaná hodnota akční zásah regulační odchylka regulátor - stabilizační svalstvo neelektrická výst. veličina převodník elektrická výst. veličina 64/78
65 Měřicí balanční plošina žádaná hodnota regulační odchylka nervové signály regulátor - stabilizační svalstvo neelektrická výst. veličina převodník elektrická výst. veličina 65/78
66 Měřicí balanční plošina žádaná hodnota regulační odchylka nervové signály regulátor - stabilizační svalstvo náklon vůči rovn. poloze převodník elektrická výst. veličina 66/78
67 Měřicí balanční plošina žádaná hodnota regulační odchylka nervové signály regulátor - stabilizační svalstvo náklon vůči rovn. poloze rovnovážné ústrojí elektrická výst. veličina 67/78
68 Měřicí balanční plošina žádaná hodnota regulační odchylka nervové signály regulátor - stabilizační svalstvo náklon vůči rovn. poloze rovnovážné ústrojí nervové signály 68/78
69 Měřicí balanční plošina rovnováha regulační odchylka nervové signály regulátor - stabilizační svalstvo náklon vůči rovn. poloze rovnovážné ústrojí nervové signály 69/78
70 Měřicí balanční plošina nervové signály náklon rovnováha regulátor - stabilizační svalstvo náklon vůči rovn. poloze rovnovážné ústrojí nervové signály 70/78
71 Měřicí balanční plošina nervové signály náklon rovnováha regulace - stabilizační svalstvo náklon vůči rovn. poloze rovnovážné ústrojí nervové signály 71/78
72 Měřicí balanční plošina Balanční deska => pomocná regulační smyčka: převodník rovnováha - rovnováha nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A - rovnovážné ústrojí nervové signály 72/78
73 Měřicí balanční plošina elektr. signál rovnováha - rovnováha inerciální snímač nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A - rovnovážné ústrojí nervové signály 73/78

74 Měřicí balanční plošina obr. vizualizace náklonu obslužný SW rovnováha - rovnováha elektr. signál inerciální snímač nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A - rovnovážné ústrojí nervové signály 74/78
75 Měřicí balanční plošina obr. vizualizace náklonu nervové signály rovnováha oko - rovnováha obslužný SW elektr. signál inerciální snímač nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A - rovnovážné ústrojí nervové signály 75/78

76 Měřicí balanční plošina obr. vizualizace náklonu nervové signály rovnováha oko - rovnováha obslužný SW elektr. signál inerciální snímač nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A - rovnovážné ústrojí nervové signály 76/78


77 Měřicí balanční plošina obr. vizualizace náklonu nervové signály rovnováha oko - rovnováha obslužný SW elektr. signál inerciální snímač nervové signály náklon regulace B nervové signály náklon stabilizační svalstvo náklon vůči rovn. poloze regulace A adaptace - rovnovážné ústrojí nervové signály 77/78

78 Děkuji za pozornost Ing. Adam Chromý Technická Brno místnost SE1.112 «
Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii. Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D.
 Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D. Projekt 3D skeneru laserový skener robotický manipulátor skenovaný objekt 2/12 Robotický
Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii Ing. Adam Chromý doc. Ing. Luděk Žalud, Ph.D. Projekt 3D skeneru laserový skener robotický manipulátor skenovaný objekt 2/12 Robotický
Kalibrační proces ve 3D
 Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Kalibrační proces ve 3D FCC průmyslové systémy společnost byla založena v roce 1995 jako součást holdingu FCC dodávky komponent pro průmyslovou automatizaci integrace systémů kontroly výroby, strojového
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Programování průmyslových robotů. Ing. Adam Chromý
 Ing. Adam Chromý Co je průmyslový robot? definice dle ISO 8373:2012: Průmyslový robot je poháněné zařízení programovatelné ve dvou nebo více osách s určitým stupněm samostatnosti, pohybující se uvnitř
Ing. Adam Chromý Co je průmyslový robot? definice dle ISO 8373:2012: Průmyslový robot je poháněné zařízení programovatelné ve dvou nebo více osách s určitým stupněm samostatnosti, pohybující se uvnitř
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Moderní trendy měření Radomil Sikora
 Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
Moderní trendy měření Radomil Sikora za společnost RMT s. r. o. Členění laserových měřičů Laserové měřiče můžeme členit dle počtu os na 1D, 2D a 3D: 1D jsou tzv. dálkoměry, které měří vzdálenost pouze
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Struktura a typy lékařských přístrojů. X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů
 Struktura a typy lékařských přístrojů X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Struktura a typy lékařských přístrojů X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k uspořádání řídícím systémům i řízení manipulátorů a robotů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k
Terestrické 3D skenování
 Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Jan Říha, SPŠ zeměměřická www.leica-geosystems.us Laserové skenování Technologie, která zprostředkovává nové možnosti v pořizování geodetických dat a výrazně rozšiřuje jejich využitelnost. Metoda bezkontaktního
Alternativní ovládání PC a okolí
 Alternativní ovládání PC a okolí Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/ Alternativní ovládání
Alternativní ovládání PC a okolí Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/ Alternativní ovládání
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Robotika
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Využití virtuální reality v rehabilitační péči. A. Bohunčák, M. Janatová, M. Tichá FBMI ČVUT v Praze, 1. LF UK
 Využití virtuální reality v rehabilitační péči A. Bohunčák, M. Janatová, M. Tichá FBMI ČVUT v Praze, 1. LF UK Pracoviště Společné biomedicínské pracoviště FBMI a 1. LF Spolupráce FBMI a Kliniky rehabilitačního
Využití virtuální reality v rehabilitační péči A. Bohunčák, M. Janatová, M. Tichá FBMI ČVUT v Praze, 1. LF UK Pracoviště Společné biomedicínské pracoviště FBMI a 1. LF Spolupráce FBMI a Kliniky rehabilitačního
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II
 Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
Kroužek pro přírodovědné talenty při Hvězdárně Valašské Meziříčí Lekce 17 ROBOTIKA II POHLEDY BĚŽNÉHO ČLOVĚKA JAKÉ ZNÁTE ROBOTY? - nejrůznější roboti se objevují už v kreslených filmech pro nejmenší -
Odborný léčebný ústav Paseka, příspěvková organizace realizoval v roce 2013 tyto vybrané investiční akce:
 Odborný léčebný ústav Paseka, příspěvková organizace realizoval v roce 2013 tyto vybrané investiční akce: A) Stavební část 1. Rekonstrukce čističky odpadních vod Akce realizována v měsíci říjen listopad
Odborný léčebný ústav Paseka, příspěvková organizace realizoval v roce 2013 tyto vybrané investiční akce: A) Stavební část 1. Rekonstrukce čističky odpadních vod Akce realizována v měsíci říjen listopad
CT-prostorové rozlišení a citlivost z
 CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Tisková konference k realizaci projektu. vybavení komplexního. Olomouc, 9. listopadu 2012
 Tisková konference k realizaci projektu Modernizace a obnova přístrojového vybavení komplexního kardiovaskulárního k centra FN Olomouc Olomouc, 9. listopadu 2012 Fakultní nemocnice Olomouc je součástí
Tisková konference k realizaci projektu Modernizace a obnova přístrojového vybavení komplexního kardiovaskulárního k centra FN Olomouc Olomouc, 9. listopadu 2012 Fakultní nemocnice Olomouc je součástí
Alternativní ovládání PC a okolí
 Alternativní ovládání PC a okolí Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/ Alternativní ovládání
Alternativní ovládání PC a okolí Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická ČVUT v Praze http://cyber.felk.cvut.cz/ Alternativní ovládání
Neurorehabilitační péče po CMP
 Neurorehabilitační péče po CMP As. MUDr. Martina Hoskovcová Rehabilitační oddělení Neurologické kliniky 1. LF UK a VFN v Praze Ucelená rehabilitace výcvik nebo znovuzískání co možná nejvyššího stupně funkčních
Neurorehabilitační péče po CMP As. MUDr. Martina Hoskovcová Rehabilitační oddělení Neurologické kliniky 1. LF UK a VFN v Praze Ucelená rehabilitace výcvik nebo znovuzískání co možná nejvyššího stupně funkčních
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
OBSAH. Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení
 OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
OBSAH Metoda 3D laserového skenování Výhody Důvody a cíle použití Pilotní projekt Postup prací Výstupy projektu Možnosti využití Závěry a doporučení METODA LASEROVÉHO SKENOVÁNÍ Laserové skenovací systémy
Bezdrátový přenos signálu v reálné aplikaci na letadle.
 Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Bezdrátový přenos signálu v reálné aplikaci na letadle. Jakub Nečásek TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Mechatronika ve strojírenství
 Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Pozemní laserové skenování. Doc. Ing. Vlastimil Hanzl, CSc.
 Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Pozemní laserové skenování Doc. Ing. Vlastimil Hanzl, CSc. Laserové skenování Technologie pro bezkontaktní určování prostorových souřadnic s následujícím 3D modelování a vizualizací skenovaných objektů.
Struktura a typy lékařských přístrojů. X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů
 Struktura a typy lékařských přístrojů X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Struktura a typy lékařských přístrojů X31LET Lékařskátechnika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
1. lékařská fakulta UK a VFN
 1. lékařská fakulta UK a VFN 3D videoanalysa pomocí infračervené kamery s aktivními markery Systém 3D infrakamer - LUKOtronic - AS 200 Mgr. Zdeněk Guřan Klinika rehabilitačního lékařství 1.LF UK a VFN
1. lékařská fakulta UK a VFN 3D videoanalysa pomocí infračervené kamery s aktivními markery Systém 3D infrakamer - LUKOtronic - AS 200 Mgr. Zdeněk Guřan Klinika rehabilitačního lékařství 1.LF UK a VFN
Strabismus diagnostika / rehabilitace
 Strabismus diagnostika / rehabilitace Strabismus - diagnostika Základ je dobrá diagnostika - SW nástroje (objektivní, přesné, rychlé, více informací, eliminace chyb lékaře, opakovatelnost) Vhodné pro děti
Strabismus diagnostika / rehabilitace Strabismus - diagnostika Základ je dobrá diagnostika - SW nástroje (objektivní, přesné, rychlé, více informací, eliminace chyb lékaře, opakovatelnost) Vhodné pro děti
Teorie bezkontaktního měření rozměrů
 Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Teorie bezkontaktního měření rozměrů Zpracoval: Petr Zelený Pracoviště: KVS Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským sociálním fondem a státním rozpočtem
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Svalem na robota Anotace: Úkolem týmu je
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Svalem na robota Anotace: Úkolem týmu je
KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC
 KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC CNC CAM CNC CNC OBECNĚ (Kk) SOUSTRUŽENÍ SIEMENS (Ry) FRÉZOVÁNÍ SIEMENS (Hu) FRÉZOVÁNÍ HEIDENHEIM (Hk) CAM EdgeCAM (Na) 3D OBJET PRINT (Kn) CNC OBECNĚ
KOMPLEXNÍ VZDĚLÁVÁNÍ KATEDRA STROJNÍ SPŠSE a VOŠ LIBEREC CNC CAM CNC CNC OBECNĚ (Kk) SOUSTRUŽENÍ SIEMENS (Ry) FRÉZOVÁNÍ SIEMENS (Hu) FRÉZOVÁNÍ HEIDENHEIM (Hk) CAM EdgeCAM (Na) 3D OBJET PRINT (Kn) CNC OBECNĚ
Aplikace bin picking s použitím senzorové fúze
 Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Moderní metody rozpoznávání a zpracování obrazových informací 2018 Aplikace bin picking s použitím senzorové fúze Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta strojní Oddělení
Mikroskop atomárních sil: základní popis instrumentace
 Mikroskop atomárních sil: základní popis instrumentace Jednotlivé komponenty mikroskopu AFM Funkce, obecné nastavení parametrů a jejich vztah ke konkrétním funkcím software Nova Verze 20110706 Jan Přibyl,
Mikroskop atomárních sil: základní popis instrumentace Jednotlivé komponenty mikroskopu AFM Funkce, obecné nastavení parametrů a jejich vztah ke konkrétním funkcím software Nova Verze 20110706 Jan Přibyl,
Struktura a typy lékařských přístrojů. X31ZLE Základy lékařské elektroniky Jan Havlík Katedra teorie obvodů
 Struktura a typy lékařských přístrojů X31ZLE Základy lékařské elektroniky Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Struktura a typy lékařských přístrojů X31ZLE Základy lékařské elektroniky Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Snadné testy i cvičení některých schopností člověka Petr Novák
 Snadné testy i cvičení některých schopností člověka Petr Novák (novakpe@labe.felk.cvut.cz) Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická
Snadné testy i cvičení některých schopností člověka Petr Novák (novakpe@labe.felk.cvut.cz) Nature Inspired Technologies Group (NIT) - http://nit.felk.cvut.cz/ Katedra kybernetiky Fakulta elektrotechnická
Možnost chirurgického plánování a precizní ortodontická analýza prostřednictvím jedinečného 3D zobrazovacího systému i-cat
 Přední pozice ve 3D dentálních zobrazovacích systémech Možnost chirurgického plánování a precizní ortodontická analýza prostřednictvím jedinečného 3D zobrazovacího systému i-cat Chirurgické předpoklady:
Přední pozice ve 3D dentálních zobrazovacích systémech Možnost chirurgického plánování a precizní ortodontická analýza prostřednictvím jedinečného 3D zobrazovacího systému i-cat Chirurgické předpoklady:
MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010
 MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010 1 www.clicmag.cz STR. 1/2 Robotické operace jsou stále dostupnější a vyhledávanější. V Centru robotické chirurgie Fakultní nemocnice u sv. Anny v Brně
MONITORING ČESKÁ REPUBLIKA ÚNOR OD 13.2. DO 19.2.2010 1 www.clicmag.cz STR. 1/2 Robotické operace jsou stále dostupnější a vyhledávanější. V Centru robotické chirurgie Fakultní nemocnice u sv. Anny v Brně
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
Armeo Senso ŘEŠENÍ PRO MAXIMÁLNÍ OBNOVU FUNKCE HORNÍ KONČETINY
 WE MOVE YOU Armeo Senso ŘEŠENÍ PRO MAXIMÁLNÍ OBNOVU FUNKCE HORNÍ KONČETINY ArmeoSenso je založen na 10 letech klinických zkušeností s přístroji Armeo společnosti Hocoma. VYSOCE INTENZIVNÍ TERAPIE HORNÍ
WE MOVE YOU Armeo Senso ŘEŠENÍ PRO MAXIMÁLNÍ OBNOVU FUNKCE HORNÍ KONČETINY ArmeoSenso je založen na 10 letech klinických zkušeností s přístroji Armeo společnosti Hocoma. VYSOCE INTENZIVNÍ TERAPIE HORNÍ
Pokročilé robotické technologie pro průmyslové aplikace
 Vize v automatizaci - Digitální továrna 4. října 2011 Výstaviště Brno Pokročilé robotické technologie pro průmyslové aplikace Aleš Pochylý, Tomáš Kubela, Vladislav Singule, Lukáš Flekal 1/18 Pokročilé
Vize v automatizaci - Digitální továrna 4. října 2011 Výstaviště Brno Pokročilé robotické technologie pro průmyslové aplikace Aleš Pochylý, Tomáš Kubela, Vladislav Singule, Lukáš Flekal 1/18 Pokročilé
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Laserové skenování (1)
") (1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
(1) Prohloubení nabídky dalšího vzdělávání v oblasti zeměměřictví a katastru nemovitostí ve Středočeském kraji CZ.1.07/3.2.11/03.0115 Projekt je finančně podpořen Evropským sociálním fondem astátním rozpočtem
BIOMECHANIKA. 3,Geometrie lidského těla, těžiště, stabilita, moment síly
 BIOMECHANIKA 3,Geometrie lidského těla, těžiště, stabilita, moment síly Studijní program, obor: Tělesná výchovy a sport Vyučující: PhDr. Martin Škopek, Ph.D. TĚŽIŠTĚ TĚLESA Tuhé těleso je složeno z velkého
BIOMECHANIKA 3,Geometrie lidského těla, těžiště, stabilita, moment síly Studijní program, obor: Tělesná výchovy a sport Vyučující: PhDr. Martin Škopek, Ph.D. TĚŽIŠTĚ TĚLESA Tuhé těleso je složeno z velkého
Medical Training Therapy (MTT) podle Dr. Alfena znamená revoluci ve všech oblastech léčby zad!
 podle Dr. Alfena znamená revoluci ve všech oblastech léčby zad!") Medical Training Therapy (MTT) podle Dr. Alfena znamená revoluci ve všech oblastech léčby zad! Medical Training Therapy podle Dr. Alfena: až 89 % všech bolestí zad je možno vyléčit! Běžné metody léčby
Medical Training Therapy (MTT) podle Dr. Alfena znamená revoluci ve všech oblastech léčby zad! Medical Training Therapy podle Dr. Alfena: až 89 % všech bolestí zad je možno vyléčit! Běžné metody léčby
Povolání Vyšší odborné vzdělání; Bakalářský studijní program
 Fyzioterapeut Jednotka práce bude aktualizována v souladu s platnou legislativou v průběhu roku 2013-2014. Fyzioterapeut provádí diagnostickou, preventivní a léčebnou péči v oblasti poruch pohybového aparátu
Fyzioterapeut Jednotka práce bude aktualizována v souladu s platnou legislativou v průběhu roku 2013-2014. Fyzioterapeut provádí diagnostickou, preventivní a léčebnou péči v oblasti poruch pohybového aparátu
IQ Easy firmy Simco-ION
 IQ Easy firmy Simco-ION Nová generace zařízení pro inteligentní ovládání statické elektřiny Firma Simco-ION představuje novou generaci výrobků pro účinnou eliminaci statické elektřiny, elektrostatické
IQ Easy firmy Simco-ION Nová generace zařízení pro inteligentní ovládání statické elektřiny Firma Simco-ION představuje novou generaci výrobků pro účinnou eliminaci statické elektřiny, elektrostatické
Využití principů industry 4.0 v robotickém měřicím pracovišti ROMESY
 Využití principů industry 4.0 v robotickém měřicím pracovišti ROMESY industry 4.0 Principy Interoperabilita (Internet věcí) Virtualizace Decentralizace Operace v reálném čase Orientace na služby Modularita
Využití principů industry 4.0 v robotickém měřicím pracovišti ROMESY industry 4.0 Principy Interoperabilita (Internet věcí) Virtualizace Decentralizace Operace v reálném čase Orientace na služby Modularita
TRENDY V POČÍTAČOVÉM PROJEKTOVÁNÍ VÝROBNÍCH SYSTÉMŮ ERGONOMICKÉ SIMULACE PODNIKOVÝCH PROCESŮ
 TRENDY V POČÍTAČOVÉM PROJEKTOVÁNÍ VÝROBNÍCH SYSTÉMŮ ERGONOMICKÉ SIMULACE PODNIKOVÝCH PROCESŮ Ing. V. Glombíková, PhD. Systémy pro simulaci výrobních systémů Systémy vyznačující se schopností vyhodnocení
TRENDY V POČÍTAČOVÉM PROJEKTOVÁNÍ VÝROBNÍCH SYSTÉMŮ ERGONOMICKÉ SIMULACE PODNIKOVÝCH PROCESŮ Ing. V. Glombíková, PhD. Systémy pro simulaci výrobních systémů Systémy vyznačující se schopností vyhodnocení
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK
 ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
ROBOTIKA M3A 2018/2019 ING. VLADIMÍR VYHŇÁK Návrh robotizovaných pracovišť Program ABB Robot Studio (dále jen ABB-RS) slouží k přípravě programů průmyslových robotů a jejich nejbližší periférie, k jejich
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
TOTÁLNÍ ENDOPROTÉZA RAMENNÍHO KLOUBU EDUKAČNÍ MATERIÁL PRO PACIENTY
 TOTÁLNÍ ENDOPROTÉZA RAMENNÍHO KLOUBU EDUKAČNÍ MATERIÁL PRO PACIENTY Vážení pacienti, jste po operaci totální endoprotézy (TEP) ramenního kloubu. V zotavování po operaci a návratu k aktivnímu životu bude
TOTÁLNÍ ENDOPROTÉZA RAMENNÍHO KLOUBU EDUKAČNÍ MATERIÁL PRO PACIENTY Vážení pacienti, jste po operaci totální endoprotézy (TEP) ramenního kloubu. V zotavování po operaci a návratu k aktivnímu životu bude
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU
 PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
PROGRAMOVÁNÍ ROBOTŮ LEGO MINDSTORM S VYUŽITÍM MATLABU J. Mareš*, A. Procházka*, P. Doležel** * Ústav počítačové a řídicí techniky, Fakulta chemicko-inženýrská, Vysoká škola chemicko-technologická, Technická
Jan Horák. Pilíře řešení
 Jan Horák Pilíře řešení Nová generace systémů Důsledek rozvoje a změn informatiky ve zdravotnictví: Nové technologie Výkonnost, mobilita, velikost monitorů, dotykové ovládání, vzdálené přístupy Nové možnosti
Jan Horák Pilíře řešení Nová generace systémů Důsledek rozvoje a změn informatiky ve zdravotnictví: Nové technologie Výkonnost, mobilita, velikost monitorů, dotykové ovládání, vzdálené přístupy Nové možnosti
Amethyst BioMat Infračervený Regenerační Systém
 Amethyst BioMat Infračervený Regenerační Systém Prevence Regenerace Relaxace www.richwayeu.com Feel Better - Heal Faster Amethyst BioMat systém ² Amethyst BioMat je infračervený systém určený pro každodenní
Amethyst BioMat Infračervený Regenerační Systém Prevence Regenerace Relaxace www.richwayeu.com Feel Better - Heal Faster Amethyst BioMat systém ² Amethyst BioMat je infračervený systém určený pro každodenní
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
SZZK magisterská. - speciální a vývojová kineziologie - léčebná rehabilitace
 SZZK magisterská Studijní program: Studijní obor: Teoretická zkouška: Praktická zkouška: Specializace ve zdravotnictví Fyzioterapie - biomechanika člověka - speciální a vývojová kineziologie - léčebná
SZZK magisterská Studijní program: Studijní obor: Teoretická zkouška: Praktická zkouška: Specializace ve zdravotnictví Fyzioterapie - biomechanika člověka - speciální a vývojová kineziologie - léčebná
Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy
 VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Závěr, shrnutí a výstupy pro další předměty projektu EduCom
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. Závěr, shrnutí a výstupy pro další předměty projektu EduCom Ing. Petr Keller,
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. Závěr, shrnutí a výstupy pro další předměty projektu EduCom Ing. Petr Keller,
ehealth, telemedicína a asistivní technologie na ČVUT FEL Praha
 České vysoké učení technické v Praze Fakulta elektrotechnická ehealth, telemedicína a asistivní technologie na ČVUT FEL Praha Lenka Lhotská, Miroslav Burša, Michal Huptych, Jan Havlík Katedra kybernetiky,
České vysoké učení technické v Praze Fakulta elektrotechnická ehealth, telemedicína a asistivní technologie na ČVUT FEL Praha Lenka Lhotská, Miroslav Burša, Michal Huptych, Jan Havlík Katedra kybernetiky,
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
ZPRÁVA Z PRŮMYSLOVÉ PRAXE
 ZPRÁVA Z PRŮMYSLOVÉ PRAXE Číslo projektu Název projektu Jméno a adresa firmy Jméno a příjmení, tituly studenta: Modul projektu CZ.1.07/2.4.00/31.0170 Vytváření nových sítí a posílení vzájemné spolupráce
ZPRÁVA Z PRŮMYSLOVÉ PRAXE Číslo projektu Název projektu Jméno a adresa firmy Jméno a příjmení, tituly studenta: Modul projektu CZ.1.07/2.4.00/31.0170 Vytváření nových sítí a posílení vzájemné spolupráce
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ TRENDY EVROPSKÉHO STAVEBNICTVÍ
 ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
ROBOTIZACE A JEJÍ IMPLEMENTACE VE STAVEBNICTVÍ doc. Ing. Pavel Svoboda, CSc. a Ing. Michal Bruzl ČVUT v Praze Fakulta stavební Katedra technologie staveb TRENDY EVROPSKÉHO STAVEBNICTVÍ 1 Obsah přednášky
Naše malé systémy pro velká zadání. Technické specifikace
 Měření kontur odklon od tradičních způsobů: Spojení měřicích os X a Z je možné jen do jistých mezí. Naše řešení: oddělení os X a Z. Osa X provádí posuv měřeného prvku, zatímco osa Z zajišt uje kontakt
Měření kontur odklon od tradičních způsobů: Spojení měřicích os X a Z je možné jen do jistých mezí. Naše řešení: oddělení os X a Z. Osa X provádí posuv měřeného prvku, zatímco osa Z zajišt uje kontakt
Struktura a typy lékařských přístrojů. A6M31LET Lékařská technika Jan Havlík Katedra teorie obvodů
 Struktura a typy lékařských přístrojů A6M31LET Lékařská technika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Struktura a typy lékařských přístrojů A6M31LET Lékařská technika Jan Havlík Katedra teorie obvodů xhavlikj@fel.cvut.cz Elektronické lékařské přístroje využití přístrojové techniky v medicíně diagnostické
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD
 PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
PRŮMYSLOVÁ AUTOMATIZACE REGULOVANÉ POHONY ROBOTICKÁ PRACOVIŠTĚ KAMEROVÉ SYSTÉMY OBCHOD ӏ Svařování ӏ Manipulace ӏ Broušení, frézování, řezání ӏ Lepení ӏ Robotické buňky ӏ Jednotlivá pracoviště ӏ Robotické
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Optoelektronické. BGL Vidlicové optické závory. snímače
 Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
Jednocestné optické závory jsou nepřekonatelné v jejich schopnosti rozlišovat malé díly a jemné detaily, stejně jako v provozní spolehlivosti. Nevýhody jsou pouze v jejich montáži a nastavení. A právě
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP
 SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
VYHODNOCOVÁNÍ DAT Z MĚŘENÍ POHYBU POMOCÍ 3D KAMERY S AKTIVNÍMI MARKERY
 VYHODNOCOVÁNÍ DAT Z MĚŘENÍ POHYBU POMOCÍ 3D KAMERY S AKTIVNÍMI MARKERY FUNDA T. ČVUT v Praze, Fakulta biomedicínského inženýrství, Společné pracoviště ČVUT a UK Abstract Analýza specificky zadaných pohybů
VYHODNOCOVÁNÍ DAT Z MĚŘENÍ POHYBU POMOCÍ 3D KAMERY S AKTIVNÍMI MARKERY FUNDA T. ČVUT v Praze, Fakulta biomedicínského inženýrství, Společné pracoviště ČVUT a UK Abstract Analýza specificky zadaných pohybů
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA BIOMEDICÍNSKÉHO INŽENÝRSTVÍ STUDIJNÍ OBORY. přehled.
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA BIOMEDICÍNSKÉHO INŽENÝRSTVÍ STUDIJNÍ OBORY přehled www.fbmi.cvut.cz OBORY BAKALÁŘSKÉHO STUDIA PROGRAM: BIOMEDICÍNSKÁ A KLINICKÁ TECHNIKA Biomedicínský technik
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA BIOMEDICÍNSKÉHO INŽENÝRSTVÍ STUDIJNÍ OBORY přehled www.fbmi.cvut.cz OBORY BAKALÁŘSKÉHO STUDIA PROGRAM: BIOMEDICÍNSKÁ A KLINICKÁ TECHNIKA Biomedicínský technik
MONITORING RACH DA VINCI ČESKÁ REPUBLIKA A SLOVENSKO
 MONITORING RACH DA VINCI ČESKÁ REPUBLIKA A SLOVENSKO ČERVEN - ČERVENEC OD 26.06. DO 02.07.2010 1 ZDRAVOTNICKKÉ NOVINY 2 www.radio.cz Čech učí Američany operovat cévy Primář cévního oddělení Nemocnice Na
MONITORING RACH DA VINCI ČESKÁ REPUBLIKA A SLOVENSKO ČERVEN - ČERVENEC OD 26.06. DO 02.07.2010 1 ZDRAVOTNICKKÉ NOVINY 2 www.radio.cz Čech učí Američany operovat cévy Primář cévního oddělení Nemocnice Na
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Svalem na robota Anotace: Úkolem týmu je
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 10 Název úlohy: Svalem na robota Anotace: Úkolem týmu je
Pohled MZ Úhrady akutní lůžkové péče v r. 2013, Kontroly poskytované péče
 Pohled MZ Úhrady akutní lůžkové péče v r. 2013, Kontroly poskytované péče ing. Petr Nosek, MZČR INMED, 22.11.2012 Řešení kontrol a přehledů péče ze strany plátce, poskytovatele a pacienta. Co je nejefektivnější?
Pohled MZ Úhrady akutní lůžkové péče v r. 2013, Kontroly poskytované péče ing. Petr Nosek, MZČR INMED, 22.11.2012 Řešení kontrol a přehledů péče ze strany plátce, poskytovatele a pacienta. Co je nejefektivnější?
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
Vizuální zpětná vazba při tréninku stability. MUDr. M. Janatová, Ing. A. Bohunčák, MUDr. M. Tichá
 Vizuální zpětná vazba při tréninku stability MUDr. M. Janatová, Ing. A. Bohunčák, MUDr. M. Tichá Laboratoř virtuální reality Společné pracoviště 1.LF UK a FBMI ČVUT, Albertov Interdisciplinární tým Doc.
Vizuální zpětná vazba při tréninku stability MUDr. M. Janatová, Ing. A. Bohunčák, MUDr. M. Tichá Laboratoř virtuální reality Společné pracoviště 1.LF UK a FBMI ČVUT, Albertov Interdisciplinární tým Doc.
Nejnovější metody léčby karcinomu prostaty
 Nejnovější metody léčby karcinomu prostaty FN a LFUK HRADEC KRÁLOVÉ Josef Košna Urologická klinika FN a LFUK Hradec Králové Úvod Nádor prostaty je druhým nejčastějším nádorem u mužů po kožních nádorech
Nejnovější metody léčby karcinomu prostaty FN a LFUK HRADEC KRÁLOVÉ Josef Košna Urologická klinika FN a LFUK Hradec Králové Úvod Nádor prostaty je druhým nejčastějším nádorem u mužů po kožních nádorech
Přístrojové vybavení společnosti GETA Centrum s.r.o. pro měření a hodnocení fyziologických faktorů práce
 konference 25.-26. května 2016 Přístrojové vybavení společnosti GETA Centrum s.r.o. pro měření a hodnocení fyziologických faktorů práce Ing. Petr Gaďourek GETA Centrum s.r.o. Strana: 2 All rights reserve
konference 25.-26. května 2016 Přístrojové vybavení společnosti GETA Centrum s.r.o. pro měření a hodnocení fyziologických faktorů práce Ing. Petr Gaďourek GETA Centrum s.r.o. Strana: 2 All rights reserve
KARIM VFN PRAHA. M. Gregorovičová. strana 1
 KARIM VFN PRAHA M. Gregorovičová strana 1 KARIM KARIM AMB - Centrum pro léčbu bolesti - Kanylační centrum - Anesteziologické ambulance Lůžková část KARIM - Resuscitační péče 16 lůžek - Pooperační péče
KARIM VFN PRAHA M. Gregorovičová strana 1 KARIM KARIM AMB - Centrum pro léčbu bolesti - Kanylační centrum - Anesteziologické ambulance Lůžková část KARIM - Resuscitační péče 16 lůžek - Pooperační péče
Husky KTW, s.r.o., J. Hradec
 Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice. Předmět: Matematika Téma: Goniometrie při měření výrobků Věk žáků: 15-16 let Časová dotace: Potřebné pomůcky,
Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice. Předmět: Matematika Téma: Goniometrie při měření výrobků Věk žáků: 15-16 let Časová dotace: Potřebné pomůcky,
Prostředky automatického řízení
 VŠB-Technická Univerzita Ostrava SN2AUT01 Prostředky automatického řízení Návrh měřícího a řídicího řetězce Vypracoval: Pavel Matoška Zadání : Navrhněte měřicí řetězec pro vzdálené měření průtoku vzduchu
VŠB-Technická Univerzita Ostrava SN2AUT01 Prostředky automatického řízení Návrh měřícího a řídicího řetězce Vypracoval: Pavel Matoška Zadání : Navrhněte měřicí řetězec pro vzdálené měření průtoku vzduchu
METROTOMOGRAFIE JAKO NOVÝ NÁSTROJ ZAJIŠŤOVÁNÍ JAKOSTI VE VÝROBĚ
 METROTOMOGRAFIE JAKO NOVÝ NÁSTROJ ZAJIŠŤOVÁNÍ JAKOSTI VE VÝROBĚ Ing. Petr Knap Carl Zeiss spol. s r.o., Praha ÚVOD Společnost Carl Zeiss Industrielle Messtechnik GmbH již dlouhou dobu sleduje vývoj v poměrně
METROTOMOGRAFIE JAKO NOVÝ NÁSTROJ ZAJIŠŤOVÁNÍ JAKOSTI VE VÝROBĚ Ing. Petr Knap Carl Zeiss spol. s r.o., Praha ÚVOD Společnost Carl Zeiss Industrielle Messtechnik GmbH již dlouhou dobu sleduje vývoj v poměrně
Robotika průmyslové roboty. Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002
 Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Robotika průmyslové roboty Vypracoval: Bc. Ludvík Kochaníček Kód prezentace: OPVK-TBdV-AUTOROB-KE-3-STZ-KOH-002 Technologie budoucnosti do výuky CZ.1.07/1.1.38/02.0032 CO ZNAMENÁ ROBOT Samotné slovo robot
Ing. Petr Knap Carl Zeiss spol. s r.o., Praha
 METROTOMOGRAFIE JAKO NOVÝ NÁSTROJ ZAJIŠŤOVÁNÍ JAKOSTI VE VÝROBĚ Ing. Petr Knap Carl Zeiss spol. s r.o., Praha ÚVOD Společnost Carl Zeiss Industrielle Messtechnik GmbH již dlouhou dobu sleduje vývoj v poměrně
METROTOMOGRAFIE JAKO NOVÝ NÁSTROJ ZAJIŠŤOVÁNÍ JAKOSTI VE VÝROBĚ Ing. Petr Knap Carl Zeiss spol. s r.o., Praha ÚVOD Společnost Carl Zeiss Industrielle Messtechnik GmbH již dlouhou dobu sleduje vývoj v poměrně
Analýza optické trasy optickým reflektometrem
 Analýza optické trasy optickým reflektometrem Zadání: Pomocí optického reflektometru, zkrácené označení OTDR (Optical Time-Domain Reflectometer), proměřte trasu, která je složena z několika optických vláken.
Analýza optické trasy optickým reflektometrem Zadání: Pomocí optického reflektometru, zkrácené označení OTDR (Optical Time-Domain Reflectometer), proměřte trasu, která je složena z několika optických vláken.
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
Mechatronické systémy příklady ANS
 Mechatronické systémy příklady ANS (automatizované nevýrobní systémy) historické, učebnicové a další příklady a) walkman Walkman je příkladem výrobku, který mechatronika stvořila. Je ukázkou tzv. konstruování
Mechatronické systémy příklady ANS (automatizované nevýrobní systémy) historické, učebnicové a další příklady a) walkman Walkman je příkladem výrobku, který mechatronika stvořila. Je ukázkou tzv. konstruování
Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D.
 Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D. K A T E D R A Ř Í D I C Í T E C H N I K Y, F E L Č V U T Motivace Regulace v každodenním životě, o které ne tak často přemýšlíme: Sprchování (nastavení
Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D. K A T E D R A Ř Í D I C Í T E C H N I K Y, F E L Č V U T Motivace Regulace v každodenním životě, o které ne tak často přemýšlíme: Sprchování (nastavení
Robotická rehabilitační pomůcka pro děti
 Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Robotická rehabilitační pomůcka pro děti Jakub Fibigar, Jan Škoda Střední průmyslová škola elektrotechnická a Vyšší
Středoškolská technika 2014 Setkání a prezentace prací středoškolských studentů na ČVUT Robotická rehabilitační pomůcka pro děti Jakub Fibigar, Jan Škoda Střední průmyslová škola elektrotechnická a Vyšší
ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY
 ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY Nadlimitní zakázka zadaná v otevřeném řízení dle 56 zákona č. 134/2016 Sb., o zadávání veřejných zakázek, ve znění pozdějších předpisů Předmět veřejné zakázky Extrakorporální
ZADÁVACÍ DOKUMENTACE VEŘEJNÉ ZAKÁZKY Nadlimitní zakázka zadaná v otevřeném řízení dle 56 zákona č. 134/2016 Sb., o zadávání veřejných zakázek, ve znění pozdějších předpisů Předmět veřejné zakázky Extrakorporální
Příloha č. 5 k nařízení vlády č. 361/2007 Sb. (Zapracovaná změna provedená NV č. 68/2010 Sb. a změna č. 93/2012 Sb.)
") Příloha č. 5 k nařízení vlády č. 361/2007 Sb. (Zapracovaná změna provedená NV č. 68/2010 Sb. a změna č. 93/2012 Sb.) Fyzická zátěž, její hygienické limity a postup jejich stanovení ČÁST A Přípustné a průměrné
Příloha č. 5 k nařízení vlády č. 361/2007 Sb. (Zapracovaná změna provedená NV č. 68/2010 Sb. a změna č. 93/2012 Sb.) Fyzická zátěž, její hygienické limity a postup jejich stanovení ČÁST A Přípustné a průměrné
spsks.cz Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU
 Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních
Část druhá - Praxe Technologie řízení robotického ramena Zpracováno v rámci projektu CZ.1.07/3,2, 10/04.0024 financovaného z fondů EU kapitola 3 Obsah 9 Úvod... 37 10 Metodika... 38 10.1 Úprava vstupních