DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
|
|
|
- Dana Veselá
- před 6 lety
- Počet zobrazení:
Transkript
1 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc.
2 CÍLE PRÁCE Sestavit programy pro kinematické, dynamické a elastostatické analýzy mechanismu TetraSphere Na základě těchto analýz provézt vícekriteriální optimalizaci mechanismu pomocí genetických algoritmů Pokusit se nalézt Pareto množinu mechanických vlastností mechanismu z výsledků optimalizace Nalézt jedno optimální řešení a určit jeho mechanické vlastnosti

3 MECHANISMUS TETRASPHERE Sférický mechanismus Paralelní kinematická struktura, redundantní pohony Pracovní prostor: naklopení o 100 do lib. směru
4 UVAŽOVANÉ MECHANICKÉ VLASTNOSTI Pracovní prostor základní předpoklad Dexterita kinematické vlastnosti a přenos sil v tuhém mechanismu Globální dynamika dosažitelné zrychlení a rychlosti Tuhost deformace a přenos sil v poddajném mechanismu Modální vlastnosti vlastní frekvence, vlastní tvary, ovlivnění zpětnovazebního řízení
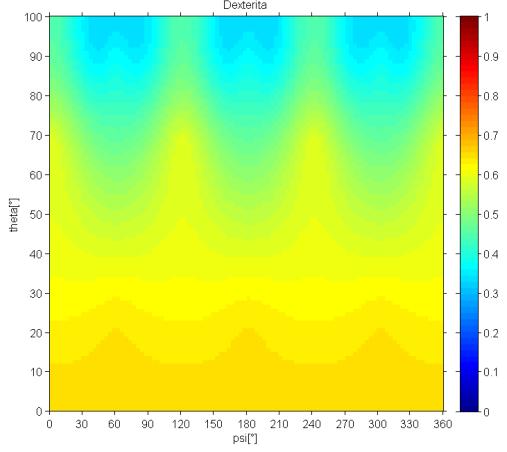
5 DEXTERITA Schopnost efektivně přenést síly z pohonů na platformu Odhalení singulárních poloh Hodnoty jsou přiřazeny polohám Nalezení převodů mezi pohony a nezávislými souřadnicemi v maticovém tvaru Dexterita definována jako převrácená hodnota podmíněnosti převodové matice S 12 = S φz ψ S φx θ S φz φ 1 v pi = S 12 2 r 2pi 2 ω 12 1 r 1ni T 1 v pi 1 v vi = 0 1 v vi = D = z i J 2 q ω 12 + J z z = 0 J = J z 1 J q 1 cond(j)
6 GLOBÁLNÍ DYNAMIKA θ = θ p θ = θ p d 1 Hledání maximálních dosažitelných zrychlení Výpočet vztažen ke trajektorii Zrychlení závisí na poloze a rychlosti na trajektorii Vychází se z inverzní dynamiky Předpoklad že r+1 pohonů dosahuje limitního momentu θ = 2 θ p 2 d θ p d 2 M θ Φ T λ = g + Tn Φ T T λ n = M θ g n = Ad Bd 1 + C + Dd 2 + V red y red
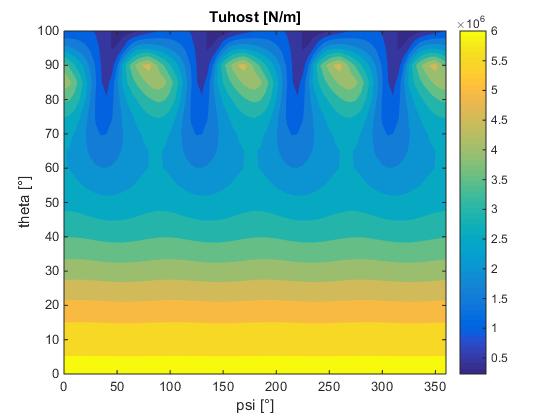
7 TUHOST Určení deformací od působících silových účinků Předpokládá poddajná tělesa Diskretizace mechanismu prutovou soustavou Pruty přenášení tah/tlak jsou spojeny sférickými klouby Rám uvažován jako tuhý Využito MKP algoritmů z [m] K e = EA L c x c x c y c x c z c x c x c x c y c x c z c x c x c y c y c y c z c y c x c y c y c y c z c y c x c z c y c z c z c z c x c z c y c z c z c z c x c x c y c x c z c x c x c x c y c x c z c x c x c y c y c y c z c y c x c y c y c y c z c y c x c z c y c z c z c z c x c z c y c z c z c z K = F Diskretizace mechanismu y [m] x [m]
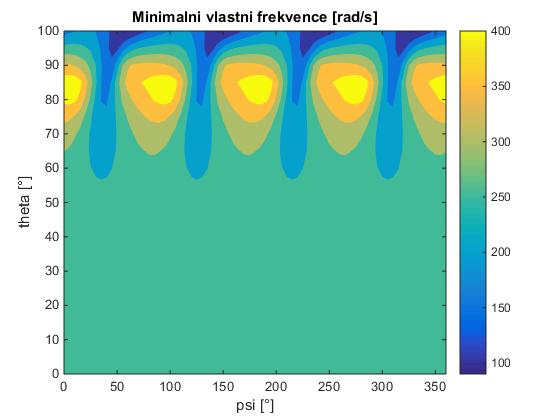
8 MODÁLNÍ ANALÝZA Hledání vlastních frekvencí a tvarů kmitu Uvažuje kombinaci vlivů hmotnosti setrvačné síly tuhosti elastické síly Vychází z výpočtu tuhosti, využívá stejnou prutovou soustavu a MKP přístup Vyhodnocuje se nejnižší vlastní frekvence M + K = 0 Mλ 2 + K u = 0 det Mλ 2 + K = 0 ω = iλ
9 OPTIMALIZACE Návrh optimalizačních parametrů Volba kritérií Optimalizační metoda Zpracování výsledků
10 OPTIMALIZAČNÍ PARAMETRY Uvažuje se rotační symetrie Vzdálenost vozíků od globální osy z je pevná Optimalizační parametry: R vzdálenost vazeb mezi platformou a nohami a osou z platformy h vzdálenost vazeb mezi platformou a nohami a rovinou xy platformy L délka nohou A_nohy průřez nohou A_stopky průřez stopky k1, k2, k,3 koeficienty závislosti řízení orientace φ = f(ψ, θ)
11 NADBYTEČNÝ STUPEŇ VOLNOSTI Poslední Eulerův úhel (úhel rotace) nemá vliv na orientaci normály platformy v prostoru Možnosti volby: Nejčastější řešení: φ = ψ Modifikace pro TetraSphere: φ = ψ + konst. Zobecnění modifikace: φ = ψ + k 1 θ 4 + k 2 θ 2 + k Dexterita Dexterita theta [ ] theta [ ] psi [ ] psi [ ] 0
12 OPTIMALIZAČNÍ METODA - CÍLOVÁ FUNKCE Byly využity genetické algoritmy (program GAOT) Cílová funkce se maximalizuje 600 generací 10 jedinců v generaci Cílová funkce byla vážený součet minimální dexterity, dynamiky, tuhosti a vlastní frekvence v pracovním prostoru Váhové koeficienty se variují K cílové funkci bylo přičteno dodatečné ohodnocení Toto ohodnocení zohledňuje rozložení vlastností v pracovním prostoru CF = v 1 dext min + v 2 dyn min + v 3 tuh min + v 4 omg min + dodatečné_ohodnocení

13 VÝSLEDKY ZOBRAZENÍ JEDINCŮ V PROSTORU KRITÉRIÍ

14 ZOBRAZENÍ VÝZNAMNÉ ČÁSTI PARETO MNOŽINY

15 VOLBA OPTIMÁLNÍHO ŘEŠENÍ
16 VOLBA OPTIMÁLNÍHO ŘEŠENÍ

17 VLASTNOSTI VÝSLEDNÉHO ŘEŠENÍ


18 VLASTNOSTI VÝSLEDNÉHO ŘEŠENÍ Trajektorie s konstantní precesí Trajektorie s konstantní nutací
19 ZÁVĚR Cíle diplomové práce naplněny Vytvořeny výpočty pro jednotlivá kritéria Provedena vícekriteriální optimalizace Nalezena Pareto množina Vybráno optimální řešení a jeho vlastnosti Navíc navržené řízení orientace podáno jako patentová přihláška
20 DĚKUJI ZA POZORNOST
21 OPTIMALIZACE POLOHOVÁNÍ TŘETÍHO ÚHLU JAKO REDUNDANTNÍHO Analyzovaný mechanismus uvažován jako naklápěcí hlava obráběcího stroje Pak třetí úhel je redundantní a lze ho užít pro optimalizaci, jak bylo ukázáno Pokud předepsány všechny tři úhly, není co optimalizovat Nastavení všech tří úhlů pro funkci manipulace nebude optimální pro polohování naklápěcí hlavy
22 UKÁZKY VÝVOJE CÍLOVÉ FUNKCE V ZÁVISLOSTI NA GENERACI Ve většině optimalizací výsledky začaly stagnovat okolo 200 generace (obr. vlevo) V některých případech výsledky zjevně nedokonvergovali a bylo by potřeba více generací (obr. vpravo)
23 VOLBA VÁHOVÝCH KOEFICIENTŮ Hodnoty váhových koeficientů: {0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1} Počet kombinací: 11 4 = Podmínka součtu váhových koeficientů: 4 i=1 v i = 1 Tuto podmínku splňuje 256 kombinací váhových koeficientů
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere
 NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
20. května Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém. výstřelu zasáhnout bod na zemi v definované vzdálenosti.
 Ukázková semestrální práce z předmětu VSME Tomáš Kroupa 20. května 2014 Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém lučištníka, který má při pevně daném natažení luku jen
Ukázková semestrální práce z předmětu VSME Tomáš Kroupa 20. května 2014 Abstrakt V následujícím dokumentu je popsán způsob jakým analyzovat problém lučištníka, který má při pevně daném natažení luku jen
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
FYZIKA I. Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
Ing. Ondřej Kika, Ph.D. Ing. Radim Matela. Analýza zemětřesení metodou ELF
 Ing. Ondřej Kika, Ph.D. Ing. Radim Matela Analýza zemětřesení metodou ELF Obsah Výpočet vlastních frekvencí Výpočet seizmických účinků na konstrukci Výpočet pomocí metody ekvivalentních příčných sil (ELF
Ing. Ondřej Kika, Ph.D. Ing. Radim Matela Analýza zemětřesení metodou ELF Obsah Výpočet vlastních frekvencí Výpočet seizmických účinků na konstrukci Výpočet pomocí metody ekvivalentních příčných sil (ELF
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
FYZIKA I. Pohyb setrvačníku. Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art.
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
ZATÍŽENÍ KŘÍDLA - I. Rozdělení zatížení. Aerodynamické zatížení vztlakových ploch
 ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
Únosnost kompozitních konstrukcí
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Experimentální hodnocení bezpečnosti mobilní fotbalové brány
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Zjednodušená deformační metoda (2):
:") Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
ČVUT UPM 6/2013. Eliška Bartůňková
 ČUT UPM 6/2013 Eliška Bartůňková Úvod 1. Motivace PMPD 1.1 Jednoosá napjatost Obsah 1.2 Zobecnění jednoosé napjatosti pro ohýbaný prut 2. Důkaz základní věty mezní analýzy pro diskrétní modely 3. Formulace
ČUT UPM 6/2013 Eliška Bartůňková Úvod 1. Motivace PMPD 1.1 Jednoosá napjatost Obsah 1.2 Zobecnění jednoosé napjatosti pro ohýbaný prut 2. Důkaz základní věty mezní analýzy pro diskrétní modely 3. Formulace
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Betonové konstrukce (S) Přednáška 3
 Přednáška 3") Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA
 ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA Zpracoval Doc. RNDr. Zdeněk Hlaváč, CSc Pojem šroubového pohybu Šroubový pohyb je definován jako pohyb, jejž lze ve vhodném referenčním bodě rozložit
ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA Zpracoval Doc. RNDr. Zdeněk Hlaváč, CSc Pojem šroubového pohybu Šroubový pohyb je definován jako pohyb, jejž lze ve vhodném referenčním bodě rozložit
Tvorba výpočtového modelu MKP
 Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);
, který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);") Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Metamorfóza obrázků Josef Pelikán CGG MFF UK Praha
 Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
ENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU
 P Ř Í K L A D Č. 4 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský kolektiv : Ing. Martin
P Ř Í K L A D Č. 4 LOKÁLNĚ PODEPŘENÁ ŽELEZOBETONOVÁ DESKA S OTVOREM VE SLOUPOVÉM PRUHU Projekt : FRVŠ 011 - Analýza metod výpočtu železobetonových lokálně podepřených desek Řešitelský kolektiv : Ing. Martin
Obr. 9.1 Kontakt pohyblivé části s povrchem. Tomuto meznímu stavu za klidu odpovídá maximální síla, která se nezývá adhezní síla,. , = (9.
 9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
JEDNOTKY. E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze. Abstrakt
 SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky. Základní pojmy
 Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Potenciální proudění
 Hydromechanické procesy Potenciální proudění + plíživé obtékání koule M. Jahoda Proudění tekutiny Pohyby elementu tekutiny 2 čas t čas t + dt obecný pohyb posunutí lineární deformace rotace úhlová deformace
Hydromechanické procesy Potenciální proudění + plíživé obtékání koule M. Jahoda Proudění tekutiny Pohyby elementu tekutiny 2 čas t čas t + dt obecný pohyb posunutí lineární deformace rotace úhlová deformace
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
F - Mechanika tuhého tělesa
 F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
Využití sendvičové struktury pro stojanové těleso obráběcího stroje
 Využití sendvičové struktury pro stojanové těleso obráběcího stroje Ing. Pavel Vrba Vedoucí práce: Prof. Ing. Jaromír Houša, DrSc. Abstrakt Na parametry přesnosti a produktivity stroje na výrazný vliv
Využití sendvičové struktury pro stojanové těleso obráběcího stroje Ing. Pavel Vrba Vedoucí práce: Prof. Ing. Jaromír Houša, DrSc. Abstrakt Na parametry přesnosti a produktivity stroje na výrazný vliv
Řešení kontaktní úlohy v MKP s ohledem na efektivitu výpočtu
 Řešení kontaktní úlohy v MKP s ohledem na efektivitu výpočtu Jan Hynouš Abstrakt Tato práce se zabývá řešením kontaktní úlohy v MKP s ohledem na efektivitu výpočtu. Na její realizaci se spolupracovalo
Řešení kontaktní úlohy v MKP s ohledem na efektivitu výpočtu Jan Hynouš Abstrakt Tato práce se zabývá řešením kontaktní úlohy v MKP s ohledem na efektivitu výpočtu. Na její realizaci se spolupracovalo
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Stavební mechanika přednáška, 10. dubna 2017
 Stavební mechanika 3 7. přednáška, 10. dubna 2017 Stavební mechanika 3 7. přednáška, 10. dubna 2017 Obecná deformační metoda 8) poznámky k využití symetrie 9) využití výpočetních programů 10) kontrola
Stavební mechanika 3 7. přednáška, 10. dubna 2017 Stavební mechanika 3 7. přednáška, 10. dubna 2017 Obecná deformační metoda 8) poznámky k využití symetrie 9) využití výpočetních programů 10) kontrola
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů.
 Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím
 Stavební mechanika, 2.ročník bakalářského studia AST Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím Katedra stavební mechaniky Fakulta stavební, VŠB - Technická univerzita Ostrava Osnova přednášky
Stavební mechanika, 2.ročník bakalářského studia AST Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím Katedra stavební mechaniky Fakulta stavební, VŠB - Technická univerzita Ostrava Osnova přednášky
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
OTÁZKY VSTUPNÍHO TESTU PP I LS 2010/2011
 OTÁZKY VSTUPNÍHO TESTU PP I LS 010/011 Pomocí Thumovy definice, s využitím vrubové citlivosti q je definován vztah mezi součiniteli vrubu a tvaru jako: Součinitel tvaru α je podle obrázku definován jako:
OTÁZKY VSTUPNÍHO TESTU PP I LS 010/011 Pomocí Thumovy definice, s využitím vrubové citlivosti q je definován vztah mezi součiniteli vrubu a tvaru jako: Součinitel tvaru α je podle obrázku definován jako:
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice. Cyklistický převod výpočet rychlosti pohybu cyklisty
 Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice. Předmět: Matematika, fyzika Téma: Cyklistický převod výpočet rychlosti pohybu cyklisty Věk žáků: 16-19 Časová
Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice. Předmět: Matematika, fyzika Téma: Cyklistický převod výpočet rychlosti pohybu cyklisty Věk žáků: 16-19 Časová
MECHANIKA TUHÉHO TĚLESA
 MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
Pružnost a pevnost (132PRPE) Písemná část závěrečné zkoušky vzorové otázky a příklady. Část 1 - Test
 Písemná část závěrečné zkoušky vzorové otázky a příklady. Část 1 - Test") Pružnost a pevnost (132PRPE) Písemná část závěrečné zkoušky vzorové otázky a příklady Povolené pomůcky: psací a rýsovací potřeby, kalkulačka (nutná), tabulka průřezových charakteristik, oficiální přehled
Pružnost a pevnost (132PRPE) Písemná část závěrečné zkoušky vzorové otázky a příklady Povolené pomůcky: psací a rýsovací potřeby, kalkulačka (nutná), tabulka průřezových charakteristik, oficiální přehled
Příklady z teoretické mechaniky pro domácí počítání
 Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
Analýza napjatosti PLASTICITA
 Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk
 Aleš Bezděk") 5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
Nauka o materiálu. Přednáška č.4 Úvod do pružnosti a pevnosti
 Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Návrh parametrů inertoru pro zlepšení vypružení vozidla
 Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
Návrh parametrů inertoru pro zlepšení vypružení vozidla Bc. Pavel Houfek 1 ČVUT v Praze, Fakulta strojní, Ústav mechaniky, mechatroniky a biomechaniky, Technická 4, 166 07 Praha 6, Česká republika Vedoucí
Modelování blízkého pole soustavy dipólů
 1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
1 Úvod Modelování blízkého pole soustavy dipólů J. Puskely, Z. Nováček Ústav radioelektroniky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně Purkyňova 118, 612 00 Brno Abstrakt Tento
Pružnost a pevnost (132PRPE), paralelka J2/1 (ZS 2015/2016) Písemná část závěrečné zkoušky vzorové otázky a příklady.
, paralelka J2/1 (ZS 2015/2016) Písemná část závěrečné zkoušky vzorové otázky a příklady.") Pružnost a pevnost (132PRPE), paralelka J2/1 (ZS 2015/2016) Písemná část závěrečné zkoušky vzorové otázky a příklady Povolené pomůcky: psací a rýsovací potřeby, kalkulačka (nutná), tabulka průřezových
Pružnost a pevnost (132PRPE), paralelka J2/1 (ZS 2015/2016) Písemná část závěrečné zkoušky vzorové otázky a příklady Povolené pomůcky: psací a rýsovací potřeby, kalkulačka (nutná), tabulka průřezových
Hydromechanické procesy Hydrostatika
 Hydromechanické procesy Hydrostatika M. Jahoda Hydrostatika 2 Hydrostatika se zabývá chováním tekutin, které se vzhledem k ohraničujícímu prostoru nepohybují - objem tekutiny bude v klidu, pokud výslednice
Hydromechanické procesy Hydrostatika M. Jahoda Hydrostatika 2 Hydrostatika se zabývá chováním tekutin, které se vzhledem k ohraničujícímu prostoru nepohybují - objem tekutiny bude v klidu, pokud výslednice
trubku o délce l. Prut (nebo trubka) bude namáhán kroutícím momentem M K [Nm]. Obrázek 1: Prut namáhaný kroutícím momentem.
![trubku o délce l. Prut (nebo trubka) bude namáhán kroutícím momentem M K [Nm]. Obrázek 1: Prut namáhaný kroutícím momentem.](/thumbs/99/141481369.jpg "trubku o délce l. Prut (nebo trubka) bude namáhán kroutícím momentem M K [Nm]. Obrázek 1: Prut namáhaný kroutícím momentem.") Namáhání krutem Uvažujme přímý prut neměnného kruhového průřezu (Obr.2), popřípadě trubku o délce l. Prut (nebo trubka) bude namáhán kroutícím momentem M K [Nm]. Obrázek : Prut namáhaný kroutícím momentem.
Namáhání krutem Uvažujme přímý prut neměnného kruhového průřezu (Obr.2), popřípadě trubku o délce l. Prut (nebo trubka) bude namáhán kroutícím momentem M K [Nm]. Obrázek : Prut namáhaný kroutícím momentem.
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine
 MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine Bc. Petr Kříbala Vedoucí práce: Ing. Jiří Mrázek, Ph.D., Ing. František Starý Abstrakt
MKP analýza konstrukčních řetězců ovinovacího balicího stroje FEM Analysis of Construction Parts of Wrapping Machine Bc. Petr Kříbala Vedoucí práce: Ing. Jiří Mrázek, Ph.D., Ing. František Starý Abstrakt
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
STABILITA SYNCHRONNÍHO HO STROJE PRACUJÍCÍHO
 STABILITA SYNCHRONNÍHO HO STROJE PRACUJÍCÍHO DO TVRDÉ SÍTĚ Ing. Karel Noháč, Ph.D. Západočeská Univerzita v Plzni Fakulta elektrotechnická Katedra elektroenergetiky a ekologie Analyzovaný ý systém: Dále
STABILITA SYNCHRONNÍHO HO STROJE PRACUJÍCÍHO DO TVRDÉ SÍTĚ Ing. Karel Noháč, Ph.D. Západočeská Univerzita v Plzni Fakulta elektrotechnická Katedra elektroenergetiky a ekologie Analyzovaný ý systém: Dále
Abstrakt: Autor navazuje na svůj referát z r. 2014; pokusil se porovnat hodnoty extrémů některých slunečních cyklů s pohybem Slunce kolem barycentra
 Úvaha nad slunečními extrémy - 2 A consideration about solar extremes 2 Jiří Čech Abstrakt: Autor navazuje na svůj referát z r. 2014; pokusil se porovnat hodnoty extrémů některých slunečních cyklů s pohybem
Úvaha nad slunečními extrémy - 2 A consideration about solar extremes 2 Jiří Čech Abstrakt: Autor navazuje na svůj referát z r. 2014; pokusil se porovnat hodnoty extrémů některých slunečních cyklů s pohybem
Téma: Dynamika - Úvod do stavební dynamiky
 Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Spojitý nosník. Příklady
 Spojitý nosník Příklady Příklad, zadání A = konst. =, m I = konst. =,6 m 4 E = konst. = GPa q =kn / m F kn 3 = M = 5kNm F = 5kN 8 F3 = 8kN 4,5 . způsob řešení n p = (nepočítáme pootočení ve styčníku č.3)
Spojitý nosník Příklady Příklad, zadání A = konst. =, m I = konst. =,6 m 4 E = konst. = GPa q =kn / m F kn 3 = M = 5kNm F = 5kN 8 F3 = 8kN 4,5 . způsob řešení n p = (nepočítáme pootočení ve styčníku č.3)
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Obr.94. Tečná reakce T r musí být menší nebo rovna třecí síle F t
 7.3 Odpory při valení Valení je definováno tak, že dotykové body valícího se tělesa a podložky jsou v relativním klidu. Je zaručeno příkladně tak, že těleso omotáme dvěma vlákny, která jsou upevněna na
7.3 Odpory při valení Valení je definováno tak, že dotykové body valícího se tělesa a podložky jsou v relativním klidu. Je zaručeno příkladně tak, že těleso omotáme dvěma vlákny, která jsou upevněna na
TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE
 1 TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE Michal Jandera Obsah přednášek 1. Stabilita stěn, nosníky třídy 4.. Tenkostěnné za studena tvarované profily: Výroba, chování průřezů, chování prutů. 3. Tenkostěnné
1 TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE Michal Jandera Obsah přednášek 1. Stabilita stěn, nosníky třídy 4.. Tenkostěnné za studena tvarované profily: Výroba, chování průřezů, chování prutů. 3. Tenkostěnné
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu
 Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Použití matematického aparátu při řešení prostorových mechanismů. Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO
 Použití matematického aparátu při řešení prostorových mechanismů Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO Téma přednášky - Mechanismy Co je to mechanismus? oustava těles spojených
Použití matematického aparátu při řešení prostorových mechanismů Ondřej FRANTIŠEK Katedra mechaniky 337, Fakulta strojní, VŠB-TUO Téma přednášky - Mechanismy Co je to mechanismus? oustava těles spojených
1 Rozdělení mechaniky a její náplň 2
 Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................
Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................