ZÁKLADNÍ PARAMETRY GYROSKOPU
|
|
|
- Bedřich Tichý
- před 8 lety
- Počet zobrazení:
Transkript
1 ZÁKLADNÍ PARAMETRY GYROSKOPU v Vektor obvodové rchlosti Moment hbnosti r Hlavní osa otáčení Vektor úhlové rchlosti
2 SLEDOVÁNÍ OTÁČENÍ ZEMĚKOULE POMOCÍ GYROSKOPU t hlavní osa t = 0 rovník Groskop je na rovníku, v čase t = 0 je poloha hlavní os vertikální. V čase t svírá s vertikálou úhel β = em.t, kde em je úhlová rchlost otáčení Země. t = 6 h. em Po 6 hodinách je poloha hlavní os vhledem k Zemi vodorovná Groskop s nenulovým momentem hbnosti achovává konstantní polohu hlavní os otáčení v prostoru
3 CORIOLISOVO ZRYCHLENÍ CORIOLISOVA SÍLA RADIÁLNÍ POHYB v u UNÁŠIVÝ POHYB B v r A v r A v r v r B V uo v u v r A B A v u V uo a c = 2[ v r ] v r a c v r v r v r a c v u v r F C F c = - 2 m a C = 2m[ v r ] hmota m
4 PRECESNÍ POHYB GYROSKOPU F hlavní osa groskopu M F k A 1 v r v v r F k A 4 p M A 2 p F k v r p v r F k A 3 F M g
5 PRECESNÍ POHYB GYROSKOPU 1. Groskop má moment hbnosti M 2. Dvojice sil F vvolá moment M Z, který se snaží otáčet groskopem podél os úhlovou rchlostí ω Z. F l F C v F C M p F 3. Na groskop působí dvě rchlostiobvodová rchlost v a úhlová rchlost ω Z. Tím dojde ke vniku Coriolisova rchlení a Coriolisov síl F C, která vvolá moment groskopické reakce M G a precesní moment M p hlavní os groskopu podél os. p p M G Věta o precesi: Působí-li na groskop s nenulovým momentem hbnosti vnější moment, který vvolá otáčení kolem jiné os než je hlavní osa groskopu, dojde k precesnímu pohbu při němž se hlavní osa groskopu posune do směru vnějšího momentu po nejkratší dráe.
6 ZÁKLADNÍ USPOŘÁDÁNÍ MECHANICKÝCH GYROSKOPŮ POUŽITÝCH NA LETADLE Kardanův ávěs a) 4 Groskop se dvěma stupni volnosti 3 b) Groskop se třemi stupni volnosti Groskop se otáčí úhlovou rchlostí kolem hlavní os otáčení. Tomu odpovídá moment hbnosti = J Y J Y je moment setrvačnosti k ose otáčení Groskop s nenulovým momentem hbnosti achovává konstantní polohu hlavní os otáčení v prostoru
7 POUŽITÍ GYROSKOPU NA LETADLE K MĚŘENÍ ÚHLŮ X absolutní podélný sklon kurs absolutní příčný sklon X X - vertikála
8 ZÁKLADNÍ USPOŘÁDÁNÍ UMĚLÉHO HORIZONTU K MĚŘENÍ ABSOLUTNÍHO PODÉLNÉHO A PŘÍČNÉHO SKLONU LETADLA Groskop se 3 stupni volnosti pomocí Kardanova ávěsu. Hlavní osa groskopu s momentem nastavena do vertikál
9 vertikála boční osa letadla stupnice podélného sklonu podélná osa letadla stupnice příčného sklonu drak letadla
10 KONSTRUKCE UMĚLÉHO HORIZONTU směr letu

11 UKAZOVACÍ ČÁST UMĚLÉHO HORIZONTU stupnice podélného sklonu smbol letadla spojený s poudrem přístroje stupnice příčného sklonu smbol aretace stupnice tlačítko aretace stupnice ukaatel relativního příčného sklonu knoflík pro nastavení nul stupnice podélného sklonu
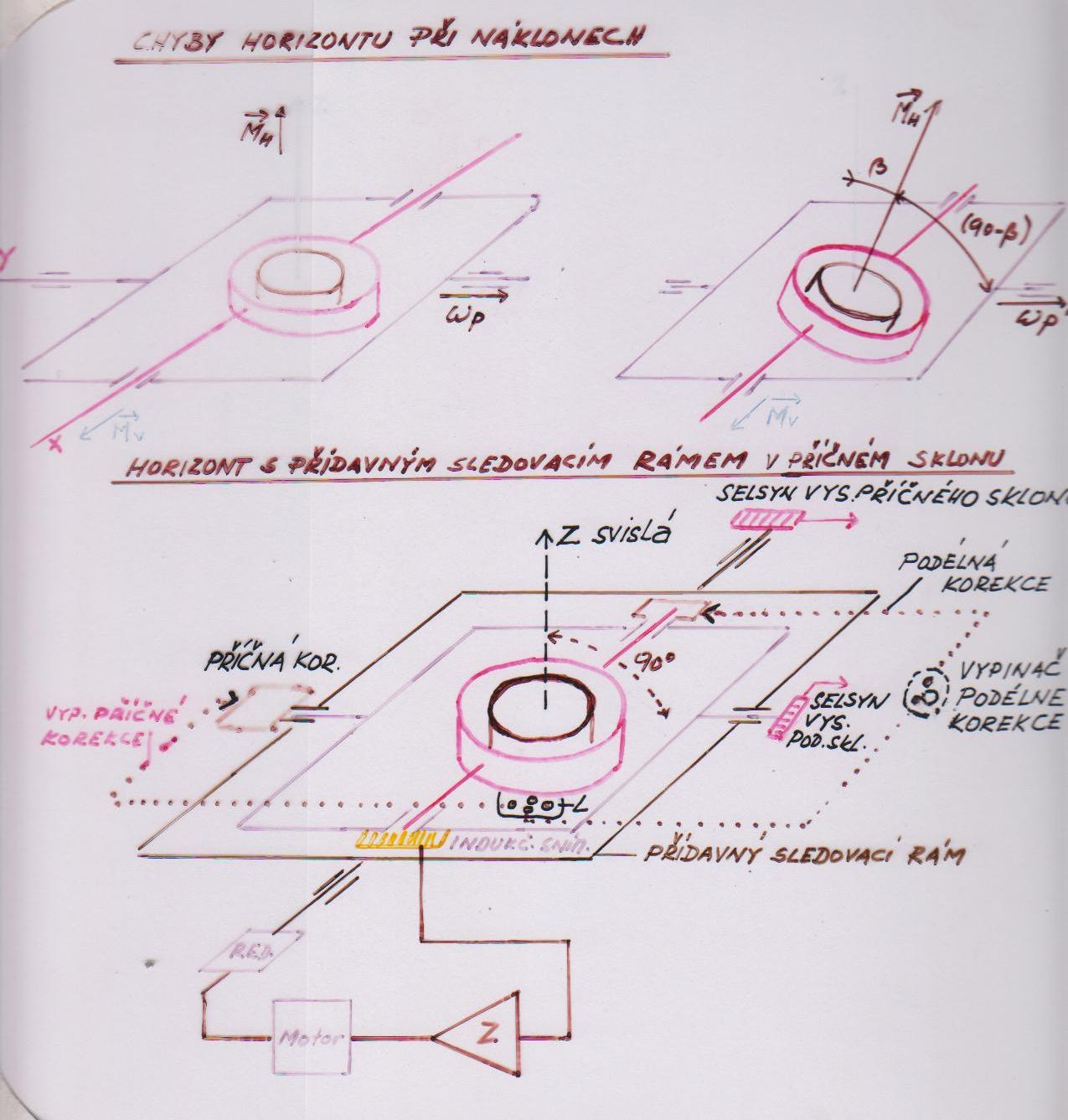
12 VZDUCHOVÁ KOREKCE POLOHY HLAVNÍ OSY GYROSKOPU groskop turbinkou s sstém vduchové korekce a) M K clonka se ávažím reakční síla F K reakční síla F K náklon hl. os b) c) hl. osa svisle d)
13 KOREKCE POMOCÍ ELEKTROLYTICKÉ LIBELY 2 Y 1 S X Y 1 S X 1 X 1 R X1 Y 1 R Y1 R X2 X 2 Y 2 2 Y 2 R Y2 X 2 vodorovná poloha X 2 náklon v ose Y 2 S
14 REALIZACE KOREKCE UMĚLÉHO HORIZONTU POMOCÍ ELEKTROLYTICKÉ LIBELY 0 0 pα KM Mk V U pβ umístění libel KM Mk V
15
16 MĚŘENÍ ÚHLOVÉ RYCHLOSTI ZATÁČENÍ GYROSKOPEM SE 2 STUPNI VOLNOSTI 5 6 M M PX

17 UKAZOVACÍ ČÁST VARIO - ZATÁČKOMĚRU stupnice variometru indikace atáčení nastavení nul variometru ukaatel skluu
18 MĚŘENÍ RELARIVNÍHO PŘÍČNÉHO SKLONU (SKLUZU) SPRÁVNĚ PROVEDENÁ ZATÁČKA a n a n R, g a v g a v a v r a) b)
19 DEFINICE KURSU LETADLA magnetický sever sever kompasu eměpisný sever deviace deklinace eměpisný kurs podélná osa letadla
 A LOXODROMĚ J 1 2 a)")
20 USPOŘÁDÁNÍ SMĚROVÉHO SETRVAČNÍKU POHYB PO ORTODROMĚ S 4 3 B A B 5 POHYB LETDLA PO ORTODROMĚ b) A LOXODROMĚ J 1 2 a)
21 USPOŘÁDÁNÍ GYROPOLOKOMPASU S KOREKCÍ NA OTÁČENÍ ZEMĚ Vnějšíí rám Kardanova ávěsu M Korekční motor v ose KM Vnitřní rám s grem Jednoosá elektroltická libela U 1 KM Korekční motor v ose M U 2
22 POUŽITÍ GYROPOLOKOMPASU K LETU PO ORTODROMĚ ro S em o po V po V vertikála R H V ro ro drak letadla po R poledník rovník
23 ZEMSKÉ MAGNETICKÉ POLE magnetická osa emská osa siločár magn. pole. H V 65 0 a) inklinace A: 70 sev. šířk, 90 áp. délk B: 72,5 jižní. šířk, 154 vých. délk b) H K H Z = (24 až 47)A/m H V = 15 A/m emský povrch

24 MAGNETICKÝ KOMPAS S PERMANENTNÍM MAGNETEM osvětlení plovák se stupnicí miska s kapalinou dilatační krabice korekční sstém permanentní magnet konektor

25 FEROMAGNETICKÉ SONDY KONSTRUKCE TŘÍSLOŽKOVÝCH SNÍMAČŮ I b A k B 3 A B H p H v snímací cívka 1 A B 2 3 pólový nástavec U v OTEVŘENÝ MAGN. OBVOD feromagnetické plíš společná budící cívka I b S X U S Y U UZAVŘENÝ(TOROIDNÍ) MAGNETICKÝ OBVOD H v

26 PRŮBĚH TOKŮ A INDUKOVANÝCH NAPĚTÍ U FEROMAGNETICKÉ SONDY
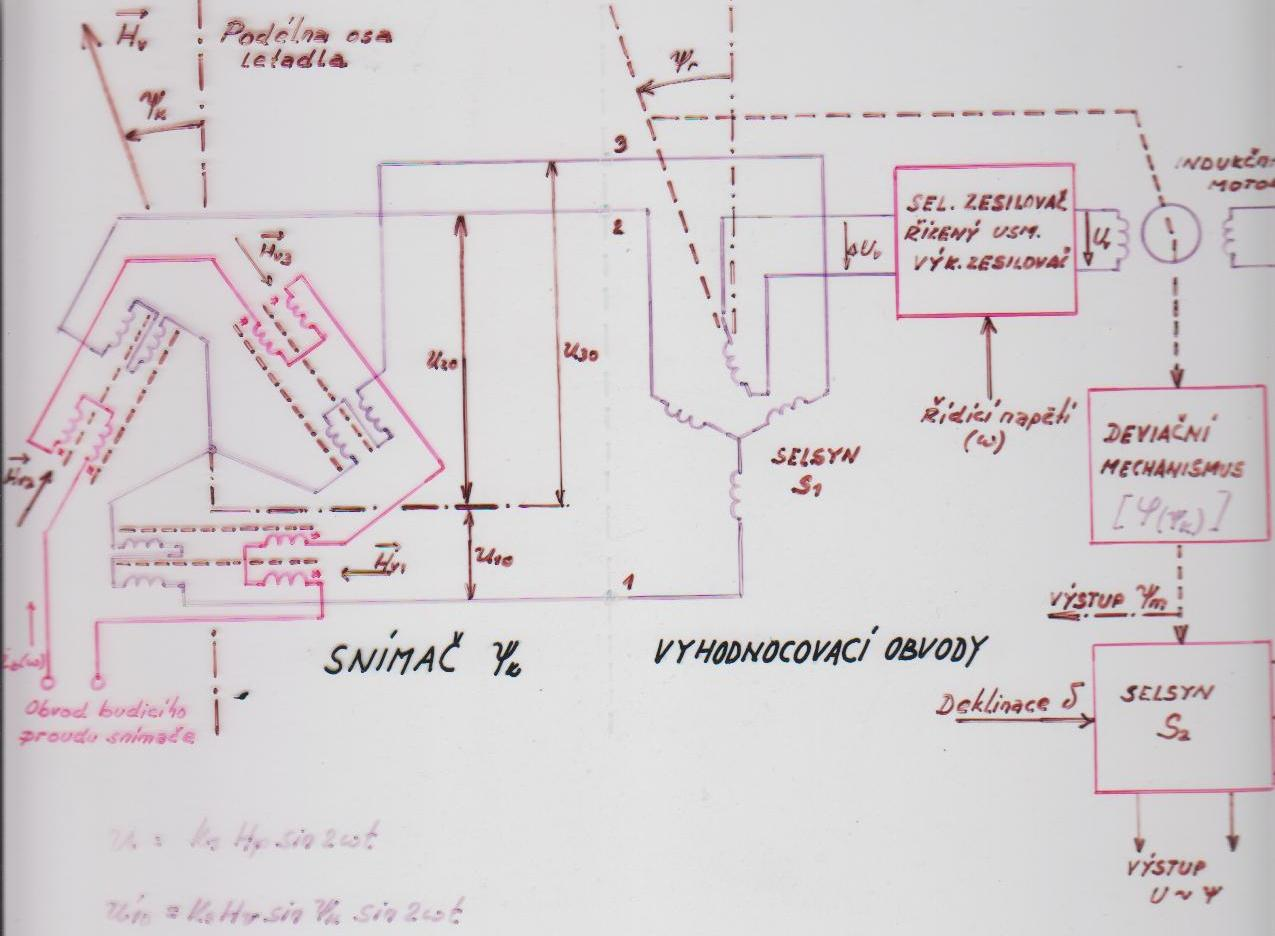
27 SYSTÉM GYROMAGNETICKÉHO KOMPASU
28 BLOKOVÉ SCHÉMA GYROMAGNETICKÉHO KOMPASU VÝSTUP SNÍMAČ MAGN. POLE U U U I b KOREKČNÍ MECHANIZMUS U ZESILOVAČ AUTOMATU SESOUHLASENÍ BUZENÍ SOND VEKTOR ZEMSKÉHO MAGNETICKÉHO POLE KONTROL A ZEM. ŠÍŘKA VSTUP DEVIACE (pevný po kompenaci) VSTUP DEKLINACE (nastavitelný) VSTUP RYCHLÉHO SESOUHLASENÍ POMALÉ SESOUHLASENÍ MAGNETICKY SNÍMANÝ KURS PULT ŘÍZENÍ ZADÁNÍ ZEM. ŠÍŘKY GYROSKOP UKAZATEL GYROPOLO KOMPAS REŽIM SIGNÁL PRO RYCHLÉ SESOUHLASENÍ MAGNETICKÝ KOMPAS RYCHLÉ SESOUHLASENÍ MAGNETICKY SNÍMANÝ KURS
ω JY je moment setrvačnosti k ose otáčení y
 ZÁKLADNÍ USPOŘÁDÁNÍ MECHANICKÝCH GYROSKOPŮ POUŽITÝCH NA LETADLE 3 2 1 ω 3 2 1 ω 3 ω Kardanův ávěs ω a) 4 Groskop se dvěma stupni volnosti 3 b) Groskop se třemi stupni volnosti Groskop se otáčí úhlovou
ZÁKLADNÍ USPOŘÁDÁNÍ MECHANICKÝCH GYROSKOPŮ POUŽITÝCH NA LETADLE 3 2 1 ω 3 2 1 ω 3 ω Kardanův ávěs ω a) 4 Groskop se dvěma stupni volnosti 3 b) Groskop se třemi stupni volnosti Groskop se otáčí úhlovou
DEFINICE ZÁKLADNÍCH LETOVÝCH A PILOTÁŽNĚ NAVIGAČNÍCH VELIČIN
 DEFINICE ZÁKLADNÍCH LETOVÝCH A PILOTÁŽNĚ NAVIGAČNÍCH VELIČIN y y g v H y x x v vodorovná rovina H z z z x g vodorovná rovina vztažné úrovně Z J V S z g MĚŘENÍ VÝŠKY LETU DEFINICE VÝŠEK METODY MĚŘENÍ VÝŠEKY
DEFINICE ZÁKLADNÍCH LETOVÝCH A PILOTÁŽNĚ NAVIGAČNÍCH VELIČIN y y g v H y x x v vodorovná rovina H z z z x g vodorovná rovina vztažné úrovně Z J V S z g MĚŘENÍ VÝŠKY LETU DEFINICE VÝŠEK METODY MĚŘENÍ VÝŠEKY
FYZIKA I. Pohyb setrvačníku. Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art.
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
Galileova transformace
 Glileov trnsformce r V Neeistuje v čse t = působ 0: = jk určit bsolutní rchlost m F m F m F ' konst.. Newtonův ákon r ' ' ' m ' F m ' F m ' F poloh ' ' v Vt ' rchlost ' v v ' v v ' v rchlení ' ' ' V ovnoměrně
Glileov trnsformce r V Neeistuje v čse t = působ 0: = jk určit bsolutní rchlost m F m F m F ' konst.. Newtonův ákon r ' ' ' m ' F m ' F m ' F poloh ' ' v Vt ' rchlost ' v v ' v v ' v rchlení ' ' ' V ovnoměrně
PARAMETRY MĚŘENÉ NA DVOUPROUDÉM MOTORU
 PARAMETRY MĚŘENÉ NA DVOUPROUDÉM MOTORU EPR vstup NACT OLEJ OP,OT, OQ FF/ FU FP PALIVO EGT EPR výstup Obr.1 NK - nízkotlaký kompresor, VK - vysokotlaký kompresor, VT - vysokotlaká turbina, NT - nízkotlaká
PARAMETRY MĚŘENÉ NA DVOUPROUDÉM MOTORU EPR vstup NACT OLEJ OP,OT, OQ FF/ FU FP PALIVO EGT EPR výstup Obr.1 NK - nízkotlaký kompresor, VK - vysokotlaký kompresor, VT - vysokotlaká turbina, NT - nízkotlaká
ADC (ADS) AIR DATA COMPUTER ( AIR DATA SYSTEM ) Aerometrický počítač, Aerometrický systém. V současné době se používá DADC Digital Air data computer
 AIR DATA COMPUTER ( AIR DATA SYSTEM ) Aerometrický počítač, Aerometrický systém. V současné době se používá DADC Digital Air data computer") ADC (ADS) AIR DATA COPUTER ( AIR DATA SYSTE ) Aerometrický očítač, Aerometrický systém V současné době se oužívá DADC Digital Air data comuter Slouží ke snímání a komlexnímu zracování aerometrických a
ADC (ADS) AIR DATA COPUTER ( AIR DATA SYSTE ) Aerometrický očítač, Aerometrický systém V současné době se oužívá DADC Digital Air data comuter Slouží ke snímání a komlexnímu zracování aerometrických a
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
LETECKÉ PŘEDPISY VŠEOBECNÉ ZNALOSTI VRTULNÍKU
 LETECKÉ PŘEDPISY LEGISLATIVA Úmluva o mezinárodním civilním letectví Mezinárodní organizace pro civilní letectví Poznávací značky letadel - Annex 7 (L7) Letová způsobilost letadel - Annex 8 (L8) PRAVIDLA
LETECKÉ PŘEDPISY LEGISLATIVA Úmluva o mezinárodním civilním letectví Mezinárodní organizace pro civilní letectví Poznávací značky letadel - Annex 7 (L7) Letová způsobilost letadel - Annex 8 (L8) PRAVIDLA
FYZIKA II. Petr Praus 10. Přednáška Magnetické pole v látce
 FYZIKA II Petr Praus 10. Přednáška Magnetické pole v látce Osnova přednášky Magnetické pole v látkovém prostředí, Ampérovy proudové smyčky, veličiny B, M, H materiálové vztahy, susceptibilita a permeabilita
FYZIKA II Petr Praus 10. Přednáška Magnetické pole v látce Osnova přednášky Magnetické pole v látkovém prostředí, Ampérovy proudové smyčky, veličiny B, M, H materiálové vztahy, susceptibilita a permeabilita
Soustava hmotných bodů
 Soustava hmotných bodů Těleso soustava hmotných bodů Tuhé těleso - pevný předmět jehož rozměr se nemění každé těleso se skládá z mnoha částc síla působící na -tou částc výsledná síla působící na předmět
Soustava hmotných bodů Těleso soustava hmotných bodů Tuhé těleso - pevný předmět jehož rozměr se nemění každé těleso se skládá z mnoha částc síla působící na -tou částc výsledná síla působící na předmět
Vítězslav Stýskala TÉMA 1. Oddíly 1-3. Sylabus tématu
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala TÉMA 1 Oddíly 1-3 Sylabus tématu 1. Zařazení a rozdělení DC strojů dle ČSN EN 2. Základní zákony, idukovaná ems, podmínky, vztahy
Elektrotechnika - test
 Základní škola, Šlapanice, okres Brno-venkov, příspěvková organizace Masarykovo nám. 1594/16, 664 51 Šlapanice www.zsslapanice.cz MODERNÍ A KONKURENCESCHOPNÁ ŠKOLA reg. č.: CZ.1.07/1.4.00/21.2389 Elektrotechnika
Základní škola, Šlapanice, okres Brno-venkov, příspěvková organizace Masarykovo nám. 1594/16, 664 51 Šlapanice www.zsslapanice.cz MODERNÍ A KONKURENCESCHOPNÁ ŠKOLA reg. č.: CZ.1.07/1.4.00/21.2389 Elektrotechnika
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Učební texty Diagnostika snímače 4.
 Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
Předmět: Ročník: Vytvořil: Datum: Praxe Fleišman Luděk 9.12.2012 Potenciometrický snímač pedálu akcelerace Název zpracovaného celku: Učební texty Diagnostika snímače 4. U běžného řízení motoru zadává řidič
1. Regulace otáček asynchronního motoru - skalární řízení
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Spínaný reluktanční motor s magnety ve statoru
 - 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
- 1 - Spínaný reluktanční motor s magnety ve statoru (c) Ing. Ladislav Kopecký, 2007 Úvod Spínaný reluktanční motor (SRM) je rotační elektrický stroj, kde jak stator, tak rotor má vyniklé póly. Statorové
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Elektro-motor. Asynchronní Synchronní Ostatní DC motory. Vinutý rotor. PM rotor. Synchron C
 26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
26. března 2015 1 Elektro-motor AC DC Asynchronní Synchronní Ostatní DC motory AC brushed Univerzální Vícefázové Jednofázové Sinusové Krokové Brushless Reluktanční Klecový stroj Trvale připojeny C Pomocná
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Obr. 4 Změna deklinace a vzdálenosti Země od Slunce v průběhu roku
 4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
Elektřina a magnetismus úlohy na porozumění
 Elektřina a magnetismus úlohy na porozumění 1) Prázdná nenabitá plechovka je umístěna na izolační podložce. V jednu chvíli je do místa A na vnějším povrchu plechovky přivedeno malé množství náboje. Budeme-li
Elektřina a magnetismus úlohy na porozumění 1) Prázdná nenabitá plechovka je umístěna na izolační podložce. V jednu chvíli je do místa A na vnějším povrchu plechovky přivedeno malé množství náboje. Budeme-li
Tématické okruhy teoretických zkoušek Part 66 1 Modul 11B Aerodynamika, konstrukce a systémy pístových letounů
 Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
3.1 Magnetické pole ve vakuu a v látkovén prostředí
 3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
ZATÍŽENÍ KŘÍDLA - I. Rozdělení zatížení. Aerodynamické zatížení vztlakových ploch
 ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
CVIČENÍ č. 10 VĚTA O ZMĚNĚ TOKU HYBNOSTI
 CVIČENÍ č. 10 VĚTA O ZMĚNĚ TOKU HYBNOSTI Stojící povrch, Pohybující se povrch Příklad č. 1: Vodorovný volný proud vody čtvercového průřezu o straně 25 cm dopadá kolmo na rovinnou desku. Určete velikost
CVIČENÍ č. 10 VĚTA O ZMĚNĚ TOKU HYBNOSTI Stojící povrch, Pohybující se povrch Příklad č. 1: Vodorovný volný proud vody čtvercového průřezu o straně 25 cm dopadá kolmo na rovinnou desku. Určete velikost
Tématické okruhy teoretických zkoušek Part 66 1 Modul 12 Aerodynamika, konstrukce a systémy vrtulníků
 Tématické okruhy teoretických zkoušek Part 66 1 12.1 Teorie letu Aerodynamika rotoru 1 2 - Názvosloví; Vlivy gyroskopické precese; Reakce kroutícího momentu a směrové řízení; Asymetrie vztlaku, odtrhávání
Tématické okruhy teoretických zkoušek Part 66 1 12.1 Teorie letu Aerodynamika rotoru 1 2 - Názvosloví; Vlivy gyroskopické precese; Reakce kroutícího momentu a směrové řízení; Asymetrie vztlaku, odtrhávání
Stacionární magnetické pole
 Stacionární magnetické pole Magnetické pole se nachází v okolí planety Země, v okolí permanentních magnetů a také v okolí vodičů s proudem. Všechna tato pole budeme v laboratorní práci studovat za pomoci
Stacionární magnetické pole Magnetické pole se nachází v okolí planety Země, v okolí permanentních magnetů a také v okolí vodičů s proudem. Všechna tato pole budeme v laboratorní práci studovat za pomoci
Pohony s krokovými motorky
 Pohony s krokovými motorky V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost setkat se s
Pohony s krokovými motorky V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost setkat se s
Mechatronické systémy s krokovými motory
 Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
pneumatiky a kola zavěšení kol odpružení řízení
 Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
FYZIKA II. Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce
 a Elektromagnetická indukce") FYZIKA II Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce Osnova přednášky tenká cívka, velmi dlouhý solenoid, toroid magnetické pole na ose proudové smyčky
FYZIKA II Petr Praus 8. Přednáška stacionární magnetické pole (pokračování) a Elektromagnetická indukce Osnova přednášky tenká cívka, velmi dlouhý solenoid, toroid magnetické pole na ose proudové smyčky
Graf závislosti dráhy s na počtu kyvů n 2 pro h = 0,2 m. Graf závislosti dráhy s na počtu kyvů n 2 pro h = 0,3 m
 Řešení úloh 1. kola 59. ročníku fyzikální olympiády. Kategorie B Autoři úloh: J. Thomas (1,, 3, 4, 7), J. Jírů (5), P. Šedivý (6) 1.a) Je-li pohyb kuličky rovnoměrně zrychlený, bude pro uraženou dráhu
Řešení úloh 1. kola 59. ročníku fyzikální olympiády. Kategorie B Autoři úloh: J. Thomas (1,, 3, 4, 7), J. Jírů (5), P. Šedivý (6) 1.a) Je-li pohyb kuličky rovnoměrně zrychlený, bude pro uraženou dráhu
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
6 Pohyb částic v magnetickém poli
 Pohb částic v magnetickém poli V této části si ukážeme, jak homogenní magnetické pole ovlivňuje pohb částic. Soustavu souřadnic volíme vžd tak, ab vektor magnetickéindukce Bsměřovalposměruos (obr.).. Lorentova
Pohb částic v magnetickém poli V této části si ukážeme, jak homogenní magnetické pole ovlivňuje pohb částic. Soustavu souřadnic volíme vžd tak, ab vektor magnetickéindukce Bsměřovalposměruos (obr.).. Lorentova
MOTORU S CIZÍM BUZENÍM
 Stejnosměrný motor Cíle cvičení: Naučit se - zapojení motoru s cizím buzením - postup při spouštění - reverzace chodu - vliv napětí na rychlost otáčení - vliv buzení na rychlost otáčení - vliv spouštěcího
Stejnosměrný motor Cíle cvičení: Naučit se - zapojení motoru s cizím buzením - postup při spouštění - reverzace chodu - vliv napětí na rychlost otáčení - vliv buzení na rychlost otáčení - vliv spouštěcího
1 Tuhé těleso a jeho pohyb
 1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
Osnova kurzu. Elektrické stroje 2. Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 3
 Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Osnova kurzu 1) 2) 3) 4) 5) 6) 7) 8) 9) 1) 11) 12) 13) Úvodní informace; zopakování nejdůležitějších vztahů Základy teorie elektrických obvodů 1 Základy teorie elektrických obvodů 2 Základy teorie elektrických
Elektrické výkonové členy Synchronní stroje
 Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Elektrické výkonové členy prof. Ing. Jaroslav Nosek, CSc. EVC 7 Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace výuky. Tato prezentace představuje učební pomůcku a průvodce
Příklady z teoretické mechaniky pro domácí počítání
 Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014
 Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
Fakulta strojní VŠB TUO Technická diagnostika Vibrodiagnostika Ing. Jan BLATA, Ph.D. Kat. 340, VŠB-TU Ostrava Ostrava 2014 Vibrodiagnostika Je jednou z nejpoužívanějších metod pro diagnostiku technického
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu DC motoru a DC servomotoru Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu DC motoru a DC servomotoru Autor: Doc. Ing. Josef Formánek, Ph.D. Tvorba grafické vizualizace
Tématické okruhy teoretických zkoušek Part 66 1 Modul 11B Aerodynamika, konstrukce a systémy pístových letounů
 Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
Měření horizontálních a vertikálních úhlů Úhloměrné přístroje a jejich konstrukce Horizontace a centrace Přesnost a chyby v měření úhlů.
 Měření horizontálních a vertikálních úhlů Úhloměrné přístroje a jejich konstrukce Horizontace a centrace Přesnost a chyby v měření úhlů Kartografie přednáška 10 Měření úhlů prostorovou polohu směru, vycházejícího
Měření horizontálních a vertikálních úhlů Úhloměrné přístroje a jejich konstrukce Horizontace a centrace Přesnost a chyby v měření úhlů Kartografie přednáška 10 Měření úhlů prostorovou polohu směru, vycházejícího
BIOMECHANIKA SPORTU ODRAZ
 BIOMECHANIKA SPORTU ODRAZ Co je to odraz? Základní činnost, bez které by nemohly být realizovány běžné lokomoční aktivity (opakované odrazy při chůzi, běhu) Komplex multi kloubních akcí, při kterém spolupůsobí
BIOMECHANIKA SPORTU ODRAZ Co je to odraz? Základní činnost, bez které by nemohly být realizovány běžné lokomoční aktivity (opakované odrazy při chůzi, běhu) Komplex multi kloubních akcí, při kterém spolupůsobí
Stacionární magnetické pole. Kolem trvalého magnetu existuje magnetické pole.
 Magnetické pole Stacionární magnetické pole Kolem trvalého magnetu existuje magnetické pole. Stacionární magnetické pole Pilinový obrazec magnetického pole tyčového magnetu Stacionární magnetické pole
Magnetické pole Stacionární magnetické pole Kolem trvalého magnetu existuje magnetické pole. Stacionární magnetické pole Pilinový obrazec magnetického pole tyčového magnetu Stacionární magnetické pole
Synchronní stroje. Φ f. n 1. I f. tlumicí (rozběhové) vinutí
 vinutí") Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Synchronní stroje Synchronní stroje n 1 Φ f n 1 Φ f I f I f I f tlumicí (rozběhové) vinutí Stator: jako u asynchronního stroje ( 3 fáz vinutí, vytvářející kruhové pole ) n 1 = 60.f 1 / p Rotor: I f ss.
Magnetické pole - stacionární
 Magnetické pole - stacionární magnetické pole, jehož charakteristické veličiny se s časem nemění kolem vodiče s elektrickým polem je magnetické pole Magnetické indukční čáry Uzavřené orientované křivky,
Magnetické pole - stacionární magnetické pole, jehož charakteristické veličiny se s časem nemění kolem vodiče s elektrickým polem je magnetické pole Magnetické indukční čáry Uzavřené orientované křivky,
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D.
 Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D. Ze zadaných třinácti příkladů vypracuje každý posluchač samostatně
Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D. Ze zadaných třinácti příkladů vypracuje každý posluchač samostatně
Příklady: 31. Elektromagnetická indukce
 16. prosince 2008 FI FSI VUT v Brn 1 Příklady: 31. Elektromagnetická indukce 1. Tuhý drát ohnutý do půlkružnice o poloměru a se rovnoměrně otáčí s úhlovou frekvencí ω v homogenním magnetickém poli o indukci
16. prosince 2008 FI FSI VUT v Brn 1 Příklady: 31. Elektromagnetická indukce 1. Tuhý drát ohnutý do půlkružnice o poloměru a se rovnoměrně otáčí s úhlovou frekvencí ω v homogenním magnetickém poli o indukci
NESTACIONÁRNÍ MAGNETICKÉ POLE. Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník
 NESTACIONÁRNÍ MAGNETICKÉ POLE Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník Nestacionární magnetické pole Vektor magnetické indukce v čase mění směr nebo velikost. a. nepohybující
NESTACIONÁRNÍ MAGNETICKÉ POLE Mgr. Jan Ptáčník - GJVJ - Fyzika - Elektřina a magnetismus - 3. ročník Nestacionární magnetické pole Vektor magnetické indukce v čase mění směr nebo velikost. a. nepohybující
Upravené znění ze dne: 1. 12. 2006 UL 3 Obsah str. 1-1 Výcviková osnova UL 3 LAA ČR UV 3. Výcviková osnova pilota ultralehkého motorového vírníku
 Upravené znění ze dne: 1. 12. 2006 UL 3 Obsah str. 1-1 Výcviková osnova UL 3 LAA ČR UV 3 Výcviková osnova pilota ultralehkého motorového vírníku Na základě pověření vydala Letecká amatérská asociace ČR,
Upravené znění ze dne: 1. 12. 2006 UL 3 Obsah str. 1-1 Výcviková osnova UL 3 LAA ČR UV 3 Výcviková osnova pilota ultralehkého motorového vírníku Na základě pověření vydala Letecká amatérská asociace ČR,
Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku
 Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku 1. Určete skalární a vektorový součin dvou obecných vektorů a a popište, jak závisí výsledky těchto součinů na úhlu mezi vektory.
Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku 1. Určete skalární a vektorový součin dvou obecných vektorů a a popište, jak závisí výsledky těchto součinů na úhlu mezi vektory.
Několik způsobů měření otáček
 Několik způsobů měření otáček BRONISLAV BALEK SŠDOS Moravský Krumlov Úvod Měření otáček je požadováno v mnoha oborech. V příspěvku bude ukázáno několik způsobů tohoto měření za pomocí ISESu (internetového
Několik způsobů měření otáček BRONISLAV BALEK SŠDOS Moravský Krumlov Úvod Měření otáček je požadováno v mnoha oborech. V příspěvku bude ukázáno několik způsobů tohoto měření za pomocí ISESu (internetového
Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů
 Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů Metodický koncept k efektivní podpoře klíčových odborných kompetencí s využitím cizího jazyka ATCZ62 - CLIL jako výuková strategie na
Technologie a řízení letecké dopravy: 6. Základní konstrukce letounů Metodický koncept k efektivní podpoře klíčových odborných kompetencí s využitím cizího jazyka ATCZ62 - CLIL jako výuková strategie na
STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE
 DANIEL TUREČEK 2005 / 2006 1. 412 5. 14.3.2006 28.3.2006 5. STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE 1. Úkol měření 1. Určete velikost tíhového zrychlení pro Prahu reverzním
DANIEL TUREČEK 2005 / 2006 1. 412 5. 14.3.2006 28.3.2006 5. STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE 1. Úkol měření 1. Určete velikost tíhového zrychlení pro Prahu reverzním
11. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky
 Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 11. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 7.4.2016 Jiří Šebesta Ústav radioelektroniky
Specializovaný kurs U3V Současný stav a výhledy digitálních komunikací 11. Elektronická navigace od lodní přes leteckou po GPS principy, vlastnosti, technické prostředky 7.4.2016 Jiří Šebesta Ústav radioelektroniky
Skalární řízení asynchronních motorů
 Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Vlastnosti pohonů s rekvenčním řízením asynchronních motorů Frekvenčním řízením střídavých motorů lze v současné době docílit téměř vlastností stejnosměrných regulačních pohonů a lze očekávat ještě další
Elektromechanické akční členy (2-0-2)
") Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
Přednášky: Elektromechanické akční členy (2-0-2) 1. Řízený pohyb v mechanických soustavách Všeobecně, motiv, princip. Zdroje zobecněných sil v mechanických soustavách. Přehled, typové a výkonové rozdělení
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, konstrukce a princip činnosti stejnosměrných strojů Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM:
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
Řízení asynchronních motorů
 Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení asynchronních motorů Ing. Jiří Kubín, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY.
 STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Vznik trojfázového napětí Průběh naznačený na obrázku je jednofázový,
STŘÍDAVÝ ELEKTRICKÝ PROUD Trojfázová soustava TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY. Vznik trojfázového napětí Průběh naznačený na obrázku je jednofázový,
I. MECHANIKA 5. Otáčení tuhého tělesa III
 I. MECHANIKA 5. Otáčení tuhého tělesa III Obsah setrvačníky volný setrvačník kulový setrvačník symetrický setrvačník asymetrický setrvačník volná osa rotace, stabilita těžký setrvačník principy využití
I. MECHANIKA 5. Otáčení tuhého tělesa III Obsah setrvačníky volný setrvačník kulový setrvačník symetrický setrvačník asymetrický setrvačník volná osa rotace, stabilita těžký setrvačník principy využití
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje. Pracovní list - příklad vytvořil: Ing.
 Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Určeno studentům středního vzdělávání s maturitní zkouškou, druhý ročník, synchronní stroje Pracovní list - příklad vytvořil: Ing. Lubomír Kořínek Období vytvoření VM: září 2013 Klíčová slova: synchronní
Magnetické vlastnosti látek (magnetik) jsou důsledkem orbitálního a rotačního pohybu elektronů. Obíhající elektrony představují elementární proudové
 jsou důsledkem orbitálního a rotačního pohybu elektronů. Obíhající elektrony představují elementární proudové") MAGNETICKÉ POLE V LÁTCE, MAXWELLOVY ROVNICE MAGNETICKÉ VLASTNOSTI LÁTEK Magnetické vlastnosti látek (magnetik) jsou důsledkem orbitálního a rotačního pohybu elektronů. Obíhající elektrony představují elementární
MAGNETICKÉ POLE V LÁTCE, MAXWELLOVY ROVNICE MAGNETICKÉ VLASTNOSTI LÁTEK Magnetické vlastnosti látek (magnetik) jsou důsledkem orbitálního a rotačního pohybu elektronů. Obíhající elektrony představují elementární
Orientace v terénu bez mapy
 Písemná příprava na zaměstnání Terén Orientace v terénu bez mapy Zpracoval: por. Tomáš Diblík Pracoviště: OVIÚ Osnova přednášky Určování světových stran Určování směrů Určování č vzdáleností Určení č polohy
Písemná příprava na zaměstnání Terén Orientace v terénu bez mapy Zpracoval: por. Tomáš Diblík Pracoviště: OVIÚ Osnova přednášky Určování světových stran Určování směrů Určování č vzdáleností Určení č polohy
Leoš Liška.
 Leoš Liška 1) Tvar a rozměry zeměkoule, rovnoběžky a poledníky. 2) Zeměpisná šířka a délka, druhy navigace při létání. 3) Časová pásma na zemi, používání času v letectví, UTC, SEČ, SELČ. 4) Východ a západ
Leoš Liška 1) Tvar a rozměry zeměkoule, rovnoběžky a poledníky. 2) Zeměpisná šířka a délka, druhy navigace při létání. 3) Časová pásma na zemi, používání času v letectví, UTC, SEČ, SELČ. 4) Východ a západ
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk
 Aleš Bezděk") 5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
Elektronické systémy řízení a kontroly podvozku
 Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 23.10.2012 Název zpracovaného celku: Elektronické systémy řízení a kontroly podvozku Elektronické systémy aktivně zasahují řidiči do řízení
Předmět: Ročník: Vytvořil: Datum: Silniční vozidla druhý NĚMEC V. 23.10.2012 Název zpracovaného celku: Elektronické systémy řízení a kontroly podvozku Elektronické systémy aktivně zasahují řidiči do řízení
SOUČASNOST A BUDOUCNOST INERCIÁLNÍCH MEMS SENZORŮ
 SOUČASNOST A BUDOUCNOST INERCIÁLNÍCH MEMS SENZORŮ Abstrakt: Jan Čižmár Univerzita obrany, Kounicova 65, 662 10 Brno jan.cizmar@unob.cz Nejrůznější mikro-elektro-mechanické (mikrosystémové) senzory jsou
SOUČASNOST A BUDOUCNOST INERCIÁLNÍCH MEMS SENZORŮ Abstrakt: Jan Čižmár Univerzita obrany, Kounicova 65, 662 10 Brno jan.cizmar@unob.cz Nejrůznější mikro-elektro-mechanické (mikrosystémové) senzory jsou
Stejnosměrné stroje Konstrukce
 Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
Stejnosměrné stroje Konstrukce 1. Stator část stroje, která se neotáčí, pevně spojená s kostrou může být z plného materiálu nebo složen z plechů (v případě napájení např. usměrněným napětím) na statoru
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Elektromagnetismus 163
 Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
Elektromagnetismus 163 I I H= 2πr Magnetické pole v blízkosti vodi e s proudem x r H Relativní permeabilita Materiály paramagnetické feromagnetické (nap. elezo, nikl, kobalt) diamagnetické Ve vzduchu je
Simulace mechanických soustav s magnetickými elementy
 Simulace mechanických soustav s magnetickými elementy Martin Bílek, Jan Valtera Modelování mechanických soustav 4.12.2014 Úvod Magnetismus je fyzikální jev, při kterém dochází k silovému působení na nositele
Simulace mechanických soustav s magnetickými elementy Martin Bílek, Jan Valtera Modelování mechanických soustav 4.12.2014 Úvod Magnetismus je fyzikální jev, při kterém dochází k silovému působení na nositele
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2012/2013 8.8 2014 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace měření
Snímače a akční členy zážehových motorů
 Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Ústav automobilního a dopravního inženýrství Snímače a akční členy zážehových motorů Brno, Česká republika Rozdělení komponent motor managementu Snímače nezbytné k určení základních provozních parametrů
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 11 Název úlohy: Krokový motor a jeho řízení Anotace: Úkolem
Stejnosměrný generátor DYNAMO
 Stejnosměrný generátor DYNAMO Cíle cvičení: Naučit se - stavba stejnosměrných strojů hlavní části, - svorkovnice, - schématické značky, - náhradní schéma zdroje napětí, - vnitřní indukované napětí, - magnetizační
Stejnosměrný generátor DYNAMO Cíle cvičení: Naučit se - stavba stejnosměrných strojů hlavní části, - svorkovnice, - schématické značky, - náhradní schéma zdroje napětí, - vnitřní indukované napětí, - magnetizační
PŘÍLOHA A. ÚSTAV VÝKONOVÉ ELEKTROTECHNIKY A ELEKTRONIKY Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně
 Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Fakulta elektrotechniky a komunikačních technologií 72 Vysoké učení technické v Brně PŘÍLOHA A Obrázek 1-A Rozměrový výkres - řez stroje Označení Název rozměru D kex Vnější průměr kostry D kvn Vnitřní
Systémy analogových měřicích přístrojů
 Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
Systémy analogových měřicích přístrojů Analogové měřicí přístroje obsahují elektromechanická ústrojí, která využívají magnetických, tepelných či dynamických účinků elektrického proudu nebo účinků elektrostatického
3. Diskutujte výsledky měření z hlediska platnosti Biot-Savartova zákona.
 1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
1 Pracovní úkol 1. Změřte závislost výchlk magnetometru na proudu protékajícím cívkou. Měření proveďte pro obě cívk a různé počt závitů (5 a 10). Maximální povolený proud obvodem je 4. 2. Výsledk měření
MODELOVÁNÍ VLASTNOSTI BEZKARDANOVÝCH INERCIÁLNÍCH NAVIGAČNÍCH SYSTÉMU MODELLING OF THE FEATURES OF STRAPDOWN INERTIAL NAVIGATION SYSTEMS
 58 Proceedings of the Conference "Modern Safet Technologies in Transportation - MOSATT 2005" MODELOVÁNÍ VLASTNOSTI BEZKARDANOVÝCH INERCIÁLNÍCH NAVIGAČNÍCH SYSTÉMU MODELLING OF THE FEATURES OF STRAPDOWN
58 Proceedings of the Conference "Modern Safet Technologies in Transportation - MOSATT 2005" MODELOVÁNÍ VLASTNOSTI BEZKARDANOVÝCH INERCIÁLNÍCH NAVIGAČNÍCH SYSTÉMU MODELLING OF THE FEATURES OF STRAPDOWN
Vzájemné silové působení
 magnet, magnetka magnet zmagnetované těleso. Původně vyrobeno z horniny magnetit, která má sama magnetické vlastnosti dnes ocelové zmagnetované magnety, ferity, neodymové magnety. dva magnetické póly (S-J,
magnet, magnetka magnet zmagnetované těleso. Původně vyrobeno z horniny magnetit, která má sama magnetické vlastnosti dnes ocelové zmagnetované magnety, ferity, neodymové magnety. dva magnetické póly (S-J,
Digital Control of Electric Drives. Vektorové řízení asynchronních motorů. České vysoké učení technické Fakulta elektrotechnická
 Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
ELEKTROMAGNETICKÉ POLE
 ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
ELEKTROMAGNETICKÉ POLE 1. Magnetická síla působící na náboj v magnetickém poli Fyzikové Lorentz a Ampér zjistili, že silové působení magnetického pole na náboj Q, závisí na: 1. velikosti náboje Q, 2. relativní
PŘÍLOHA. nařízení Komise v přenesené pravomoci,
 EVROPSKÁ KOMISE V Bruselu dne 12.10.2015 C(2015) 6823 final ANNEX 1 PART 9/11 PŘÍLOHA nařízení Komise v přenesené pravomoci, kterým se mění nařízení Rady (ES) č. 428/2009, kterým se zavádí režim Společenství
EVROPSKÁ KOMISE V Bruselu dne 12.10.2015 C(2015) 6823 final ANNEX 1 PART 9/11 PŘÍLOHA nařízení Komise v přenesené pravomoci, kterým se mění nařízení Rady (ES) č. 428/2009, kterým se zavádí režim Společenství
Co už víme o magnetismu
 Co už víme o magnetismu ➊ Označ písmenem A (ano) tělesa z látek magnetických a písmenem N (ne) z látek nemagnetických. Můžeš se na základě obrázků rozhodnout ve všech případech? Pokud ne, které obrázky
Co už víme o magnetismu ➊ Označ písmenem A (ano) tělesa z látek magnetických a písmenem N (ne) z látek nemagnetických. Můžeš se na základě obrázků rozhodnout ve všech případech? Pokud ne, které obrázky
Řezání závitu s konstantním stoupáním (G33, SF)
") Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
Funkce Pomocí příkazu G33 je možné vyrábět závity s konstantním stoupáním: Válcový závit 3 Rovinný závit 2 Kuželový závit 1 Poznámka Technickým předpokladem pro tento způsob řezání závitů pomocí příkazu
Tématické okruhy teoretických zkoušek Part 66 1 Modul 11A Aerodynamika, konstrukce a systémy turbínových letounů
 Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
Tématické okruhy teoretických zkoušek Part 66 1 11.1 Teorie letu 11.1.1 Aerodynamika letounu a řízení letu 1 2 - Činnost a účinek: - řízení příčného náklonu: křidélka a spoilery; - řízení podélného sklonu:
Doc. Ing. Stanislav Kocman, Ph.D , Ostrava
 9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
9. TOČIV IVÉ ELEKTRICKÉ STROJE Doc. Ing. Stanislav Kocman, Ph.D. 2. 2. 2009, Ostrava Stýskala, 2002 DC stroje Osnova přednp ednášky Princip činnosti DC generátoru Konstrukční provedení DC strojů Typy DC
Toroidní generátor. Ing. Ladislav Kopecký, červenec 2017
 1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je
1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je