ZPRACOVÁNÍ SNÍMKŮ SRDEČNÍCH BUNĚK
|
|
|
- Alexandra Blažková
- před 8 lety
- Počet zobrazení:
Transkript
1 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF BIOMEDICAL ENGINEERING ZPRACOVÁNÍ SNÍMKŮ SRDEČNÍCH BUNĚK PROCESSING OF CARDIAC CELL IMAGES BAKALÁŘSKÁ PRÁCE BACHELOR'S THESIS AUTOR PRÁCE AUTHOR VEDOUCÍ PRÁCE SUPERVISOR MARTIN VÁCLAVEK Ing. JAN ODSTRČILÍK, Ph.D. BRNO 2015
2 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Ústav biomedicínského inženýrství Bakalářská práce bakalářský studijní obor Biomedicínská technika a bioinformatika Student: Martin Václavek ID: Ročník: 3 Akademický rok: 2014/2015 NÁZEV TÉMATU: Zpracování snímků srdečních buněk POKYNY PRO VYPRACOVÁNÍ: 1) Seznamte se s principem snímání mikroskopických obrazů srdečních buněk. 2) Prostřednictvím odborné literatury proveďte studium metod zvýrazňování a segmentace obrazu. Rovněž proveďte literární rešerši prací zabývajících se použitím těchto metod v oblasti zpracování obrazů srdečních buněk. 3) Vybrané metody blíže nastudujte a implementujte ve vybraném programovém prostředí za účelem analýzy kontrakce srdečních buněk. 4) Implementované algoritmy otestujte a vhodně vyhodnoťte na dostupných obrazových datech. 5) Proveďte diskusi dosažených výsledků a zhodnoťte účinnost a využitelnost aplikovaného řešení. 6) K vytvořeným programovým funkcím sepište přehledný návod k obsluze. DOPORUČENÁ LITERATURA: [1] PAWLEY, J. Handbook of Biological Confocal Microscopy. 3rd ed. Springer, New York, [2] JAN, J. Medical Image Processing, Reconstruction and Restoration - Concepts and Methods. CRC Tylor and Francis, New York, Termín zadání: Termín odevzdání: Vedoucí práce: Ing. Jan Odstrčilík, Ph.D. Konzultanti bakalářské práce: prof. Ing. Ivo Provazník, Ph.D. Předseda oborové rady UPOZORNĚNÍ: Autor bakalářské práce nesmí při vytváření bakalářské práce porušit autorská práva třetích osob, zejména nesmí zasahovat nedovoleným způsobem do cizích autorských práv osobnostních a musí si být plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení části druhé, hlavy VI. díl 4 Trestního zákoníku č.40/2009 Sb.
3 Abstrakt Tato bakalářská práce se zaobírá tématem číslicového zpracování obrazu v oblasti snímání vzorků srdečních buněk. Cílem práce je seznámení se s metodami snímání obrazů buněk srdce, dále s metodami číslicového zpracování obrazu za účelem analýzy kontraktility kardiocytu z předem získaných sekvencí snímků. Jsou zde popsány jednotlivé základní metody zpracování obrazu a principy, na kterých jsou tyto metody založeny. Také jsou uvedeny a popsány způsoby měření kontraktility kardiocytu. V další části jsou vybrané metody implementovány v programovacím prostředí MATLAB a aplikovány na dvě sekvence snímků buněk myokardu, které byly získány pomocí mikroskopie ve světlém poli. Klíčová slova číslicové zpracování obrazu, kardiocyt, zpracování snímků buněk srdce, MATLAB, analýza kontraktility, Wienerův filtr, Cannyho detektor, detekce hran, segmentace Abstract This bachelor thesis is dealing with topic of digital image processing in the field of cardiac cell imaging. The aim of this thesis is familiarization with cardiac cell imaging methods and then with methods of digital image processing for a purpose of cardiocyte contractility analysis of previously captured image sequences. Basic methods of image processing and principles, which they are based on, are described. Methods for assessing cardiocyte contractility are also described. In the following part, chosen methods are implemented in MATLAB and applied on two image sequences of cardiac cells, which were obtained using bright field microscopy. Keywords digital image processing, cardiocyte, cardiac cell images processing, MATLAB, contractility analysis, Wiener filter, Canny detector, edge detection, segmentation
4 VÁCLAVEK, M. Zpracování snímků srdečních buněk. Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, s. Vedoucí bakalářské práce Ing. Jan Odstrčilík PhD.
5 PROHLÁŠENÍ Prohlašuji, že svou bakalářskou práci na téma Zpracování snímků srdečních buněk jsem vypracoval samostatně pod vedením vedoucího bakalářské práce a s použitím odborné literatury a dalších informačních zdrojů, které jsou všechny citovány v práci a uvedeny v seznamu literatury na konci práce. Jako autor uvedené bakalářské práce dále prohlašuji, že v souvislosti s vytvořením této diplomové práce jsem neporušil autorská práva třetích osob, zejména jsem nezasáhl nedovoleným způsobem do cizích autorských práv osobnostních a jsem si plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení 152 trestního zákona č. 140/1961 Sb. V Brně dne podpis autora
6 PODĚKOVÁNÍ Tímto bych rád poděkoval vedoucímu práce Ing. Janu Odstrčilíkovi, Ph.D. za účinnou metodickou, pedagogickou a odbornou pomoc, za jeho trpělivost, vstřícnost a poskytnutí cenných rad při zpracování mé bakalářské práce. Také bych chtěl poděkovat svým rodičům za jejich trpělivost a nesmírnou podporu při mých studiích. V Brně dne podpis autora
7 OBSAH OBSAH SEZNAM OBRÁZKŮ SEZNAM ZKRATEK 1 ÚVOD SNÍMÁNÍ OBRAZŮ KARDIOMYOCYTŮ TRANSMISNÍ METODY OPTICKÉ MIKROSKOPIE Fázová kontrastní mikroskopie (PCM) Diferenciální interferenční kontrastní mikroskopie (DIC) FLUORESCENČNÍ MIKROSKOPIE Epifluorescenční mikroskopie Konfokální mikroskopie SIMULTÁNNÍ MĚŘENÍ FOTOTOXICITA ČÍSLICOVÉ ZPRACOVÁNÍ OBRAZU D SYSTÉMY PRO ZPRACOVÁNÍ OBRAZŮ Bodové operátory Lokální operátory Globální operátory METODY ZVÝRAZŇOVÁNÍ OBRAZU Transformace kontrastu Zostřování obrazu Potlačování šumu METODY OBRAZOVÉ ANALÝZY Detekce hran Segmentace obrazu MORFOLOGICKÉ OPERACE Dilatace Eroze Otevírání a uzavírání obrazu ANALÝZA KONTRAKTILITY ANALÝZA POMOCÍ MĚŘENÍ PERIODICITY SARKOMER ANALÝZA POMOCÍ MĚŘENÍ VELIKOSTI KARDIOCYTU Zpracování snímků buněk srdce ANALÝZA KONTRAKTILITY MIKROSKOPEM ATOMÁRNÍCH SIL... 41
8 5 REALIZACE MĚŘENÍ KONTRAKTILITY FÁZE PŘEDZPRACOVÁNÍ SEGMENTACE Detekce hran Morfologické transformace MĚŘENÍ KONTRAKTILITY VÝSLEDKY A DISKUZE VÝSLEDKY SEGMENTACE MĚŘENÍ KONTRAKTILITY ZÁVĚR SEZNAM POUŽITÉ LITERATURY SEZNAM PŘÍLOH
9 SEZNAM OBRÁZKŮ Obr. 1: Příklady zpracovávaných obrazů kardiomyocytů. Obr. 2: Princip průchodu světla fázovým kontrastním mikroskopem. Převzato z [7]. Obr. 3: Princip diferenciálního interferenčního kontrastního mikroskopu. Převzato z [7]. Obr. 4: Jablonského diagram 1) fáze excitace, 2) přesun molekuly do nejnižšího energetického excitovaného stavu, 3) návrat molekul do svého základního stavu. Převzato z [11]. Obr. 5: Princip SDCM. Převzato z [7]. Obr. 6: Princip LSCM. Převzato z [7]. Obr. 7: Schéma systému pro zpracování 2D signálu Obr. 8: Schematické znázornění bodového operátoru; hodnota pixelu výstupního obrazu (output) je ovlivněna pouze hodnotou pixlu vstupního obrazu (input) na stejné pozici. Převzato z [17] Obr. 9: Schematické znázornění lokálního operátoru; maska velikosti 3x3 překrývá část vstupního obrazu (input), výsledný pixel výstupního obrazu (output) pozičně odpovídá středovému elementu masky. Převzato z [17]. Obr. 10: Schematické znázornění globálního operátoru; maska vah (uprostřed) je aplikována na celý vstupní obraz (nalevo), výsledná hodnota pixelu výstupního obrazu (vpravo) je tedy ovlivněna všemi pixely vstupního obrazu. Převzato z [17]. Obr. 11: Příklad po částech lineární transformační funkce; horizontální osa značí intenzitu pixelu vstupního obrazu, vertikální osa intenzitu výstupního pixelu. Vyznačení na horizontální ose odpovídá rozsahu zvýrazňovaného kontrastu vstupního obrazu, na vertikální ose je pak vyznačená výsledná změna intenzity výstupního obrazu. Převzato z [15]. Obr. 12: Schematické znázornění profilů hran v obraze. Převzato z [18] Obr. 13: Schematické znázornění profilu hrany při procesu zostřování hran Obr. 14: Diagram Wienerovy filtrace. W reprezentuje Wienerův filtr, y(i,j) je výstupní obraz, d(i,j) je obraz bez šumu, e(i,j) je pak střední kvadratická odchylka. Obr. 15: Pixely sousedící středovému elementu ve 45 skocích. Obr. 16: Ilustrace 3. kroku Cannyho detektoru. Šipky udávají směr gradientu, číselná hodnota je velikost gradientu. Výsledné ponechané pixely jsou vyznačeny bílým obrysem. Převzato z [21]. Obr. 17: Dvojité prahování pixely znázorněné bílou barvou svou intenzitou přesahují vysoký práh T H, tvoří tak silnou hranu, intenzity pixelů mezi prahy jsou znázorněny šedou barvou, tvoří slabé hrany, hodnoty pixelů pod úrovní spodního prahu T L jsou potlačeny. Převzato z [22]. Obr. 18: Histogramy tří objektů A, B, C. Vlevo se objekty svou intenzitou výrazně liší, vpravo se objekty překrývají. Převzato z [15]. Obr. 19: Příklady masek pro morfologické operace. Vlevo nahoře maska tvaru diamantu, vpravo nahoře maska tvaru disku, dole maska tvaru linie s možným nastavením sklonu. Origin udává střed masky, R její poloměr, LEN a DEG délku a sklon linie. Obr. 20: Průběh dilatace. Nahoře vstupní obraz tvaru obdelníku a strukturovací element, uprostřed překrývání strukturovacího elementu a obrazu, dole výsledný dilatovaný obraz. Převzato z [24]. Obr. 21: Průběh eroze. Nahoře vstupní obraz a strukturovací element, uprostřed překrývání strukturovacího elementu a obrazu, dole výsledný obraz po erozi. Převzato z [24]. Obr. 22: Princip AFM. Obr. 23: Hlavička vytvořené funkce
10 Obr. 24: Vlevo nahoře originální obraz, uprostřed filtrace Wienerovým filtrem, vpravo Gaussova filtrace, vlevo dole obraz po morfologické operaci, vpravo dole obraz po odečtení od filtrace Wienerovým filtrem. Obr. 25: Stejné kroky zpracování aplikované na druhou sekvenci. Obr. 26: Strukturovací element typu disk a poloměru 4. Obr. 27: Profily hran originálního obrazu, 1. a 2. derivace. Obr. 28: Nahoře originální obraz, dole obrazy detekovaných hran Canny detektor (vlevo), Sobelův operátor (uprostřed), metoda zero-crossing (vpravo). Detekce probíhala po použití Wienerovy filtrace. Obr. 29: Stejné pořadí jednotlivých detekcí hran pro druhou sekvenci. Obr. 30: Velikost a tvar strukturovacího elementu pro dilataci hran v horizontálním směru (vlevo) a vertiálním směru (vpravo). Obr. 31: Jednotlivé kroky morfologických operací při použití Wienerovy filtrace. Dilatace (vlevo nahoře), vyplnění objektu (nahoře uprostřed), první odstranění falešných objektů (vpravo nahoře), vyhlazeni objektu (vlevo uprostřed), druhé odstranění falešných (uprostřed), extrakce kontury (vpravo uprostřed), vysegmentovaný kardiocyt. Obr. 32: Jednotlivé kroky morfologických operací pro druhou sekvenci. Obr. 33: Pofil řádku obrazu kardiocytu s přičtenou konturou. Dvě maxima reprezentují konce kardiocytu. Obr. 34: Vývojový diagram funkce analyzakontraktility.m. Obr. 35: Cannyho operátor (vlevo), Sobelův operátor (uprostřed), zero-crossing metoda (vpravo). Nahoře je předchozí použití Gaussova filtru, dole Wienerova filtru. Sekvence sekv1.avi. Obr. 36: Výsledky detekce hran pro sekvenci sekv2.avi, stejné řazení obrázků jako v předchozím obraze. Obr. 37: Příklady obrázků se segmentovanými kardiocyty ze sekvence sekv1.avi. První a třetí řada Gaussova filtrace + Cannyho detektor (vlevo) a zero-crossing (vpravo), druhá a čtvrtá řada Wienerova filtrace + Cannyho detektor (vlevo) a zero-crossing (vpravo). Obr. 38: Segementace kardiocytu sekvence sekv2.avi. Řazení obrázků stejné jako v předchozím setu. Obr. 39: Grafy kontraktility pro kombinaci Wienerův filtr a Cannyho detektor. Obr. 40: Grafy kontraktility pro kombinaci Wienerův filtr a metoda zero-crossing. Obr. 41: Grafy kontraktility pro kombinaci Gaussův filtr a Cannyho detektor. Obr. 42: Grafy kontraktility pro kombinaci Gaussův filtr a metoda zero-crossing. Obr. 43: Graf kontraktility pro kombinaci Wienerův filtr a Cannyho detektor. Obr. 44: Graf kontraktility pro kombinaci Wienerův filtr a metoda zero-crossing. Obr. 45: Graf kontraktility pro kombinaci Gaussův filtr a Cannyho detektor. Obr. 46: Graf kontraktility pro kombinaci Gaussův filtr a metoda zero-crossing Obr. 47: Detail pravé strany kardiocytu s málo kontrastní sarkolemou.
11 SEZNAM ZKRATEK SNR PCM DIC SDCM LSCM CCD AFM Signal to Noise Ratio Phase Contrast Microscopy Differential Interference Contrast Microscopy Spinning Disk Confocal Microscopy Laser Scanning Confocal Microscopy Charge-Coupled Device Atomic Force Microscopy
12 1 ÚVOD Kardiovaskulární onemocnění jsou nejzávažnějšími a nejnebezpečnějšími nemocemi dnešní doby. Odhaduje se, že každý rok na tato onemocnění zemře přibližně 17,5 milionů lidí na světě. Výdaje na jejich léčbu, která však často bývá neúspěšná, přesahují 300 miliard eur [1]. Proto je předmětem mnoha studií zkoumání těchto nemocí, jejich příčin, projevů a hledání způsobů jejich léčby. Lidské tělo můžeme anatomicky rozdělit do orgánových soustav (kardiovaskulární soustava, gastrointestinální soustava a další). Orgánové soustavy jsou tvořeny jednotlivými orgány, např. srdcem, cévami, krví. Dalším stupněm dělení jsou tkáně, které dohromady tvoří orgány. Stavebním prvkem všech tkání jsou pak samotné buňky a mezibuněčná hmota. Pokud je předmětem výzkumu chování samotného orgánu, je nejvhodnější zkoumat chování základního stavebního kamene orgánu, tedy buňky. Základní jednotkou srdce, která provádí kontrakci, je ventrikulární myocyt. Přímým zdrojem informací o kontraktilitě srdce pod vlivem léků nebo nemoci je tak měření kontraktility samotného kardiomyocytu [2]. Jelikož by však pozorování kardiomyocytů člověka odporovalo biomedicínské etice, tak se v kardiovaskulárním výzkumu používají izolované dospělé, neonatální nebo embryonální kardiocyty ze srdce jiných savců, např. krys a myší [1], [2]. Metody, které zkoumají kontraktilitu kardiomyocytu je možné rozdělit do dvou skupin. První skupinou jsou metody, které přímo zpracovávají 2D mikroskopické snímky celé buňky. To je možné díky vysokorychlostním kamerám s velkým prostorovým rozlišením. Tyto metody jsou založené na měření kontraktility pomocí detekce hranic buňky a následném měření její délky nebo obsahu [1], [3]. Druhou skupinou jsou pak metody, které využívají světelné difrakce. Tyto metody měří kontraktilitu myocytu pomocí zkoumání vnitřní struktury buňky, konkrétně periodicitu sarkomer [4]. Je přirozené, že při akvizici, digitalizaci a přenosu obrazových dat mikroskopem a následným systémem, který zpracovává tato data, dochází k určitým deformitám obrazu. Ty se projevují zanesením šumu do obrazu, jeho rozostřením a dalšími nedokonalostmi. Dalším problémem může být kvalita snímané scény. Mimo buňku, jež je předmětem zájmu, se ve snímané scéně mohou objevit další nechtěné objekty (např. bubliny, mrtvé buňky). Dále pak samotná buňka může obsahovat různé nedostatky 6
13 v podobě nepravidelných roztřepených konců buňky nebo lokálního přerušení sarkolemy [1]. Všechny tyto nedokonalosti obrazu pak znemožňují jeho analýzu. Proto je v případě první skupiny metod zapotřebí využít technik číslicového zpracování obrazu, kterými je možné tyto chyby potlačit a následně obraz dále zpracovat pro jeho kvalitnější analýzu. Cílem této práce je seznámit se s jednotlivými metodami snímání obrazů buněk srdce a technikami číslicového zpracování obrazu a s jejich využitím pak zmíněné nedokonalosti z obrazu odstranit a potřebné objekty v obraze zvýraznit. Dále vybrané metody implementovat v programovém prostředí za účelem analýzy kontraktility myocytu a na předem získaných datech tyto metody otestovat. 7
14 2 SNÍMÁNÍ OBRAZŮ KARDIOMYOCYTŮ Kardiomyocyty jsou podlouhlé buňky o rozměrech přibližně 25 µm na šířku a 100 µm na délku. Jsou tvořeny paralelně uspořádanými myofibrilami, které jsou pomocí Z-linií rozděleny do sarkomer tvořící typické příčné pruhování. Myofibrily se skládají z myofilament konkrétně aktinu a myozinu. Tato myofilamenta jsou zodpovědná za kontraktilitu samotné buňky. Tak jako všechny buňky i kardiomyocyt je ohraničen cytoplazmatickou membránou sarkolemou [1], [3]. Aby bylo možné sledovat pouze jeden kardiocyt, je nutné jej izolovat ze srdeční tkáně. Izolace kardiocytu je proces skládající se z mnoha kroků. Ty zahrnují několikastupňovou perfuzi vyoperovaného srdce různými roztoky a pufry, jeho následnou inkubaci a enzymatickou disociaci samotného myocytu. Proces izolace je nutné provádět ve sterilním prostředí, za stabilních podmínek, které jsou přirozené lidskému tělu (37 C, ph = 7,4). Takto izolovaná buňka by měla být použita do 8 hodin od izolace, avšak při úspěšné kultivaci je možné tuto dobu prodloužit až na 48 hodin [2], [5]. U izolovaných kardiocytů samozřejmě nedochází ke spontánním kontrakcím, jelikož pro vyvolání kontrakce je nutný akční potenciál. Ten je pří pozorování simulován umělým elektrickým polem, které je vytvořeno pomocí stimulátoru a dvou platinových elektrod umístěných na opačných koncích komory, ve které mikroskopické pozorování probíhá. Stimuly vyvolávající kontrakci mohou mít různé parametry dobu trvání 3 ms, s frekvencemi 0,33 nebo 0,5 Hz, velikostí musí přesahovat prahový potenciál [1], [2], [5]. Vzhledem k tomu, že předmětem pozorování jsou živé buňky u kterých jsou pozorovány dynamické vlastnosti, bude obraz snímán v čase, tedy bude ve formátu videa. Metody snímání obrazů kardiomyocytů a technické příslušenství mikroskopů volíme podle požadovaných vlastností obrazu. V případě zkoumání kontraktility je potřebné dobré prostorové i časové rozlišení videa. Obojí je dnes zajištěno díky rychlému rozvoji digitálních technologií a obraz je tedy snímán pomocí vysokorychlostních kamer s vysokým prostorovým rozlišením [3]. Dalším požadavkem je vysoký kontrast obrazu a vysoký poměr signálu obrazu ku šumu (tzv. SNR). Kontraktilitu je možné měřit více metodami. Pokud kontraktilitu hodnotíme z hlediska zkracování buňky pomocí digitálního zpracování obrazu, nabízenými metodami jsou metody klasické optické mikroskopie ve světlém poli nebo laserové difrakční metody. 8


15 Jelikož je kontrakce myokardu založena na změnách koncentrace vápenatého kationtu Ca 2+ v intracelulárním prostředí, je možné kontraktilitu měřit i pomocí měření obsahu iontů Ca 2+ uvnitř buňky. To umožňují metody fluorescenční mikroskopie [3], [6]. Obr. 1: Příklady zpracovávaných obrazů kardiomyocytů. 2.1 Transmisní metody optické mikroskopie Tyto metody jsou založeny na detekci intenzity světla prošlého vzorkem. Když světlo prochází vzorkem, dochází na jeho strukturách k absorbci a rozptylu světla, což vede k jeho útlumu. Když je pak utlumené světlo detekováno na detektoru, jeho rozdílné intenzity vytváří kontrast obrazu. Mikroskopie světlého pole však často nedokáže poskytnout potřebný kontrast pro následné zpracování snímku, protože většina živých vzorků je téměř průhledných. Proto se pro pozorování živých buněk používají techniky, které zvyšují kontrast výsledného obrazu fázová kontrastní mikroskopie (PCM) a diferenciální interferenční kontrastní mikroskopie (DIC) [7], [8], [9] 9
16 2.1.1 Fázová kontrastní mikroskopie (PCM) Při průchodu světla prostředím, které je téměř průhledné a od okolního prostředí se liší pouze vyšším indexem lomu, dochází k nepatrným změnám ve fázi prošlého světla. Tato fázová modulace je převedena na odpovídající změny amplitudy detekovaného signálu, které jsou pak zobrazeny jako rozdíly kontrastu. Obr. 2: Princip průchodu světla fázovým kontrastním mikroskopem. Převzato z [7]. Světlo z osvětlovacího systému je kondenzorem (Condenser) zaostřeno na pozorovaný vzorek (Specimen). Na vzorku dochází k rozptylu světla. Do objektivu (Objective) dopadá světlo, které prošlo pozadím pozorovaného vzorku bez fázové změny (Undeviated Light) a světlo, které se rozptýlilo při průchodu vzorkem (Deviated Light). Rozptýlené světlo bývá fázově posunuto o -90 (resp. π/2) oproti světlu z pozadí. Na fázové destičce (Phase plate) dochází k dalšímu fázovému posunu rozptýleného světla o +90 (+π/2). Výsledný obraz vzniká interferencí těchto dvou vlnění, které jsou navzájem fázově posunuty o 180. To pak ve výsledku vytváří amplitudový rozdíl, a tedy rozdíl v kontrastu [7], [10] Diferenciální interferenční kontrastní mikroskopie (DIC) Další způsob zvýšení kontrastu u téměr transparentních buněk je založen opět na interferenci dvou svazků paprsků. Koherentní světlo ze zdroje osvětlení je rozděleno pomocí Wollastonova hrnolu (Wollaston Prism) na dva koherentní svazky paprsků. Kondenzorem jsou paprsky zaostřeny na vzorek. Při průchodu těchto svazků vzorkem 10
17 dochází k jejich vzájemnému fázovému posunu. Následně jsou oba svazky paprsků pomocí Normaného hranolu (Normanski Prism) spojeny do jednoho svazku, čímž dochází k jejich interferenci. Jejich vzájemný fázový rozdíl při interferenci opět způsobí amplitudové změny, resp. kontrastní rozdíly [7], [10]. Obr. 3: Princip diferenciálního interferenčního kontrastního mikroskopu. Převzato z [7]. 2.2 Fluorescenční mikroskopie Fluorescenční mikroskopie je, podle názvu, založena na fluorescenčním jevu. Tento jev se společně s fluorescencí nazývá luminiscence. Luminiscenci je možné charakterizovat jako schopnost určitých látek, nazývajících se luminofory, resp. fluorofory, vyzářit fotony světla, ke které dochází při excitaci molekul těchto látek. Na základě povahy excitovaného stavu se pak luminiscence dělí na zmíněnou fluorescenci a fosforescenci, jež mají odlišné vlastnosti. Aby docházelo k fluorescenci, musí být splněny dvě podmínky. První je zapotřebí látka, která tento jev umožňuje fluorofor. Molekuly fluoroforu je pak nutné excitovat. K tomu dochází absorbcí elektromagnetického záření, nejčastěji záření světelného. Absorbcí tohoto záření molekuly fluoroforu přijmou energii a dostávají se do energeticky vyšších hladin excitovaných stavů. V závislosti na vlnové délce světla a tedy jeho energii, které způsobí excitaci, se molekuly fluoroforu mohou dostat do různých excitovaných stavů. Avšak vzhledem k tomu, že fluorofor v těchto energeticky vyšších stavech není stabilní, jeho molekuly přecházejí do nejnižšího, semi-stabilního excitovaného stavu. Následně se pak molekuly přeskupí ze semi-stabilního excitovaného stavu zpět do původního energetického základního stavu. Při tomto 11
18 posledním přechodu dochází k uvolnění přebytečné energie v podobě fotonů emise světla. Celý tento jev, který proběhne za velmi krátký časový úsek, přibližně 10 ns, je znázorěn v tzv. Jablonského diagramu [11], [12], [13]. Obr. 4: Jablonského diagram 1) fáze excitace, 2) přesun molekuly do nejnižšího energetického excitovaného stavu, 3) návrat molekul do svého základního stavu. Převzato z [11] Epifluorescenční mikroskopie Jak již bylo zmíněno v kapitole 2, fluorescenční metody se používají k měření koncentrací Ca 2+ iontů uvnitř kardiocytu. Při vnější stimulaci buňky se otevřou vápníkové kanály v cytoplazmatické membráně, což vede ke zvýšení koncentrace Ca 2+ iontů v intracelulárním prostředí. Tyto změny aktivují kontraktilní aparát a myocyt se kontrahuje [6]. Fluorescenční metody měření kontraktility jsou založeny na označení Ca 2+ iontů pomocí vhodných fluorescenčních sond (fluoroforů). Tyto sondy jsou excitovány excitačním světlem a dochází k vyzáření emisního záření, které je detekováno detektorem. V oblasti se zvýšenou koncentrací vápenatých kationtů je intenzita detekovaného emisního záření vyšší, což oproti nízké koncentraci iontů mimo buňku vede ke kontrastnímu rozdílu Konfokální mikroskopie Konfokální mikroskopie je pokročilejší metoda fluorescenční mikroskopie, která oproti klasickému epifluorescenčnímu mikroskopu nabízí několik výhod. Hlavní výhodou je jeho vyšší rozlišovací schopnost. Té je dosaženo snímáním emitovaného světla pouze z ohniskové roviny mikroskopu. Nežádoucí světlo emitované z jiných rovin vzorku, které by způsobovalo zhoršení kvality obrazu v podobě rozostření, je odfiltrováno bodovou clonou. Konfokální mikroskop také umožňuje nastavit hloubku vzorku (vertikální Z-rovina), ze které se záření bude detekovat [7]. 12
19 Existují dvě techniky využívající konfokální princip. První je konfokální mikroskop s rotujícím Nipkowovým kotoučem (SDCM Spinnig disk confocal microscopy). Nipkowův kotouč je proděravěná kruhovitá deska (až desítky tisíc dírek o průměru μm pinholes, uspořádaných do spirály). SDCM zpravidla obsahuje dva Nipkowovy kotouče, kdy první z nich umístěný za zdrojem excitačního záření, rozkládá svazek světla tak, že v jednu chvíli jsou osvíceny stovky až tisíce bodů vzorku najednou. Druhý Nipkowův kotouč provádí prostorovou filtraci emisního záření ze vzorku. Druhou technikou je laserový skenovací konfokální mikroskop (LSCM). U této metody konfokální mikroskopie záření prochází první bodovou clonou, následně skrze excitační filtr na dichroické zrcátko. To v tomto případě excitační světlo o kratších vlnových délkách odrazí na objektiv, resp. na pozorovaný vzorek. Zde dochází k excitaci a vyzáření světla o vyšší vlnové délce, které se vrací skrze objektiv na dichroické zrcátko. To již záření o vyšší vlnové délce propustí na bariérový filtr, odkud pokračuje skrze druhou bodovou clonu na fotonásobičový detektor. Detekce emitovaného záření pouze z fokální, zaostřené roviny je dosaženo právě pomocí dvou bodových clon. Značnou výhodou SDCM oproti LSCM je rychlejší snímání scény díky Nipkowově kotouči. SDCM je pak vhodnější pro snímání dynamické scény. Zároveň také v případě SDCM dochází v čase k menšímu ozáření pozorovaného vzorku, což snižuje fototoxicitu, která bude popsána dále. [7], [8], [9] Obr. 5: Princip SDCM. Převzato z [7]. 13
20 Obr. 6: Princip LSCM. Převzato z [7]. 2.3 Simultánní měření Díky určitým modifikacím mikroskopu a použitím dvou snímacích kamer je možné provádět simultánní fluorescenční měření koncentrace Ca 2+ iontů a snímání kardiocytu pomocí jedné z transmisních metod optické mikroskopie [3]. Pokud pomineme koncentraci Ca 2+ a rozdíly metod fluorescenční mikroskopie, kvalita fluorescenčního signálů závisí na celkové intezitě excitačního záření zachyceného detektorem. Stejně tak i kvalita trasmisního signálu, kromě vzhledu kardiocytu, závisí na celkové intezitě prošlého záření zachyceného kamerou. Vzhledem k tomu, že oba dva signály prochází stejnou optickou cestou, je nutno je od sebe oddělit pomocí optických filtrů. Důvodem je to, že jak transmisní, tak fluorescenční techniky mají pro svůj signál v optické trase prvky, které by zeslabovaly intenzitu daného detekovaného signálu (u PCM to jsou fázové destičky, u DIC optické hranoly). Zárověn, i když jsou od sebe oba signály spektrálně dostatečně oddělené, jeden do druhého by zanášely šum. Při simultánním snímání je tedy potřeba zvážit, zda je měření obou signálů opravdu nutné [3], [6], [8], [9]. 14
21 2.4 Fototoxicita Při snímání živých buněk mikroskopem se objevují dva zásadní problémy, které se týkají jediného předmětu udržet buňku při pozorování naživu a způsobit jí co nejméně škody, aby byla zachována její přirozená funkce. Prvním problémem, který se však daří vcelku úspěšně řešit, je zachování přirozeného vnějšího prostředí buňky. Zde se jedná o udržení stabilní teploty okolního prostředí, parciálního tlaku O 2 a CO 2, ph, vlhkosti vzduchu, osmolarity. K nastavení a zachování těchto podmínek se používá tzv. kultivační snímací komora [9], [14]. Mnohem závažnějším problémem, se kterým je možné se vypořádat pouze částečně a za cenu kompromisů, je tzv. fototoxicita. Jelikož většina buněk, včetně kardiomyocytů, nejsou běžně vystavovány světlu, často u nich dochází k poškození vlivem světla. V případě transmisních metod je fototoxicita minimální. I tak je však potřeba znát spektrální vlastnosti použitého zdroje světla a omezit jeho intezitu, pokud obsahuje složky blízké ultrafialovému a infračervenému záření [9]. Fototoxicita je problémem hlavně u fluorescenčních metod. Při excitaci molekul fluoroforu totiž dochází ke vzniku volných radikálů, které mohou buňku poškodit. Proto je vhodné celkově minimalizovat dobu expozice vzorku excitačnímu záření a intenzitu excitačního záření. Tohoto je možné optimalizací optické cesty mikroskopu, aby se dosáhlo co nejvyšší efektivity, a použitím co nejcitlivější detektorů fluorescenčního záření samozřejmě s vědomím možného snížení poměru SNR, kdy při citlivětjším snímání dochází k detekci většího množství šumu. Při pozorování živých buněk je nutné volit kompromis mezi kvalitním snímkem, poměrem SNR a viabilitou buňky. [7], [8], [9] 15
22 3 ČÍSLICOVÉ ZPRACOVÁNÍ OBRAZU Obraz je možné definovat jako vizuální scénu, která je zachycena pomocí zobrazovacího systému (např. mikroskop) transformováním prostoru předmětového do prostoru obrazového. Obraz, jakožto dvourozměrný signál (2D), bývá matematicky popsán spojitou, resp. diskrétní obrazovou funkcí o dvou proměnných f(x,y), kde x a y jsou rovinné prostorové souřadnice a funkční hodnota představuje hodnotu jasu na daných souřadnicích. Pro zajištění schopnosti zpracovávat obraz číslicovými metodami, je nezbytné nejprve obraz zdigitalizovat. Tímto procesem rozumíme navzorkování obrazu do matice prvků (pixelů) o rozměru M x N, čímž ze spojité obrazové funkce získáme funkci diskrétní. Druhým krokem je kvantizace navzorkovaného obrazu do úrovní jasu. Spojité hodnoty funkce jsou tedy převedeny na diskrétní hodnoty jednotlivých pixelů. V dnešní době už probíhá veškeré zpracování obrazu na počítači, proto bývá digitalizace obrazu zajištěna již při akvizici dat. Vzhledem k tomu, že je někdy složité zajistit linearitu přenosu signálu zobrazovacím systémem, obraz nemusí vždy přesně odpovídat vizuální scéně z hlediska barevnosti, prostorového zkreslení a může obsahovat šum znehodnocující obraz, případně další nedokonalosti, které znemožňují jeho kvalitní interpretaci a vizuální analýzu. Proto byly vyvinuty metody, které se tyto nedokonalosti snaží potlačit a zlepšit tak informační využití a subjektivní dojem obrazu. [15], [16] Číslicové metody zpracování obrazu je možné dle jejich účelu rozdělit do tří kategorií. První kategorie se zabývá zvýrazňováním obrazu, které se provádí za účelem zlepšení subjektivního dojmu z obrazu. Patří sem například transformace kontrastu, zostřování a zdůrazňování hran. Toto zlepšení pak umožňuje kvalitnější použití metod druhé kategorie obrazové analýzy. Účelem těchto metod je detekování hran v obraze, segmentace a následně popis obrazu. Výsledkem tedy bývá popis obrazu, který do procesu analýzy vstupuje, na rozdíl od metod zvýrazňování, kde je výstupem zlepšený obraz. Do poslední kategorie se řadí metody rekonstrukce tomografických obrazů z planárních projekcí (vytváření 3D modelů z 2D projekcí) a metody obrazové fúze kombinování dvou a více obrazů do jednoho. Tato práce se zabývá použitím a kombinací metod zvýrazňování obrazu a obrazové analýzy. [15] 16
23 3.1 2D systémy pro zpracování obrazů Jednotlivé metody zpracování obrazu jsou realizovány pomocí vícerozměrných systémů pro zpracování obrazu (v našem případě 2D systémy, protože zpracováváme 2D signál), neboli tzv. operátorů. Tyto systémy jsou popsány jednoduchou rovnicí: g(x, y) = P{f(x, y)} (3.1) kde je vstupní obraz f(x,y) zpracován operátorem P a výstupem je zpracovaný obraz g(x,y). Obr. 7: Schéma systému pro zpracování 2D signálu Operátory můžeme rozdělit na základě několika kritérií. Podle toho, jestli operátor splňuje princip superpozice (viz rovnice (3.2)) nebo ne, rozlišujeme operátory lineární a nelineární. P { a i f i (x, y) } = a i P{f i (x, y)} f i (3.2) Operátory mohou být směrově závislé, tedy anizotropní, a naopak nezávislé na směru, ve kterém obraz zpracovávají izotropní. Pokud se vlastnosti systému mění v závislosti na poloze systému v rovině obrazu, jedná se o prostorově variantní operátory (např. adaptivní filtry). Jestliže jsou vlastnosti systému nezávislé na jeho pozici, operátor je prostorově invariantní. Posledním kritériem dělení operátorů je jak velkým okolím 17
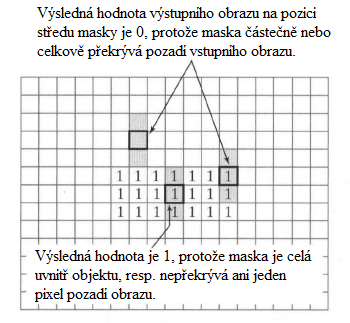
24 zpracovávaného pixelu vstupního obrazu je ovlivněna výsledná hodnota pixelu výstupního obrazu operátory bodové, lokální a globální. [15] Bodové operátory Operace realizované bodovými operátory jsou základní a nejjednodušší metody zpracování obrazu. Při této operaci je hodnota každého pixelu výstupního obrazu ovlivněna pouze pixelem vstupního obrazu ležícím na stejné pozici. Tuto operaci je také možné definovat pomocí rovnice (3.3) g(x, y) = N{f(x, y)} (3.3) kde f (x,y) je hodnota pixelu vstupního obrazu na pozici x a y, g (x,y) je hodnota pixelu výstupního obrazu na stejné pozici a N reprezentuje transformační funkci operátoru. Tyto operátory, které se svou povahou řadí převážně mezi nelineární, realizují transformace kontrastu, vytvoření negativu, popřípadě pseudobarvení obrazu. [15] Obr. 8: Schematické znázornění bodového operátoru; hodnota pixelu výstupního obrazu (output) je ovlivněna pouze hodnotou pixlu vstupního obrazu (input) na stejné pozici. Převzato z [17] Lokální operátory Lokální operátory jsou specifické tím, že hodnota pixelu výstupního obrazu je ovlivněna určitým okolím obklopující pixel vstupního obrazu na stejných souřadnicích. Velikost tohoto okolí je dáno rozměrem tzv. masky vah (L x L). Ta prochází obrazem a realizuje výpočet hodnoty výstupního pixelu konvolucí masky s oblastí obrazu, kterou 18
 = f(m, n)h i,k (m i, n k) m=i L/2 n=k L/2 (3.4) L reprezentuje rozměr masky, g(i,k) hodnotu výstupního pixelu, f(m,n) hodnota vstupních pixelů a h(i,k) masku vah.")
25 maska překrývá (viz rovnice (3.4)). Rozměr masky bývá značně menší, než je velikost celého obrazu, a volí se liché rozměry, aby maska měla element přesně uprostřed (např. 3 x 3, 5 x 5). i+l/2 k+l/2 g(i, k) = f(m, n)h i,k (m i, n k) m=i L/2 n=k L/2 (3.4) L reprezentuje rozměr masky, g(i,k) hodnotu výstupního pixelu, f(m,n) hodnota vstupních pixelů a h(i,k) masku vah. Tyto operátory, které bývají také nazývány maskové nebo konvoluční operátory, mají lineární charakter a jsou převážně prostorově invariantní. Používají se pro redukci šumu, vyhlazování obrazu, zostřování hran a jejich detekci. [15] Obr. 9: Schematické znázornění lokálního operátoru; maska velikosti 3x3 překrývá část vstupního obrazu (input), výsledný pixel výstupního obrazu (output) pozičně odpovídá středovému elementu masky. Převzato z [17] Globální operátory Pro globální operátory platí, že každý pixel výstupního obrazu je ovlivněn všemi pixely obrazu vstupního. V podstatě je tento operátor rozšířením lokálního operátoru, jehož maska vah má stejné rozměry, jako vstupní obraz. Matematicky je tato operace popsána rovnicí (3.5). 19
 N je rozměr celého obrazu, g(i,k) hodnota výstupního pixelu, f(m,n) hodnota vstupních pixelů a h(m,n,i,k) jsou váhy určující jak velký vliv bude mít daný vstupní pixel na pixel výstupní.")
26 N 1 N 1 g(i, k) = f(m, n)h(m, n, i, k) m=0 n=0 (3.5) N je rozměr celého obrazu, g(i,k) hodnota výstupního pixelu, f(m,n) hodnota vstupních pixelů a h(m,n,i,k) jsou váhy určující jak velký vliv bude mít daný vstupní pixel na pixel výstupní. Globální operátory se používají pro pokročilejší metody zpracování obrazů, mezi které patří rekonstrukce a restaurace obrazů, tvorba a následné zpracování frekvenčních spekter 2D signálů pomocí dvourozměrné Fourierovy transformace (FT). [15], [17] Obr. 10: Schematické znázornění globálního operátoru; maska vah (uprostřed) je aplikována na celý vstupní obraz (nalevo), výsledná hodnota pixelu výstupního obrazu (vpravo) je tedy ovlivněna všemi pixely vstupního obrazu. Převzato z [17]. 3.2 Metody zvýrazňování obrazu Zvýrazňování obrazu může být definováno jako proces, do kterého vstupuje vstupní, nedokonalý obraz, a na výstup dává pozměněný obraz, který poskytuje lepší subjektivní psychosenzorický vjem než obraz původní. Co přesně toto zlepšení znamená, záleží na tom, k čemu má být výsledný obraz použit, případně jak má být dále zpracován. Konkrétním účelem může být vizuální analýza obrazu, texturní analýza, hranová detekce a následná segmentace obrazu. Je vhodné také zdůraznit, že tyto metody nijak neupravují informační obsah obrazu dochází pouze k selektivnímu zvýraznění některých rysů na úkor jiných. Mezi metody zvýrazňování obrazu můžeme zařadit transformace kontrastu, případně barevné stupnice, vyhlazování a potlačení šumu a dalších rušivých komponent obrazu, 20
27 zostřování a zdůrazňování hran, geometrické transformace obrazu (přiblížení, neboli zoomování určité části obrazu, odstranění geometrické distorze obrazu). [15] Transformace kontrastu Schopnost rozlišit jednotlivé části obrazu, a tedy potažmo jeho celkový vzhled, je dán hodnotami kontrastu každého z pixelů. Obraz, který není dostatečně kontrastní, je obtížné kvalitně analyzovat. Proto je fundamentální metodou zvýrazňování obrazu úprava jeho kontrastu. Tato operace bývá realizována pomocí bodového operátoru a je popsána rovnicí (3.3). V závislosti na tom, jak vypadá vstupní obraz a jaké oblasti obrazu mají být zvýrazněny (resp. jaké hodnoty kontrastu), může být transformační funkce operátoru lineární, po částech lineární nebo nelineární, v případě, kdy provádíme gamma korekci. Obr. 11: Příklad po částech lineární transformační funkce; horizontální osa značí intenzitu pixelu vstupního obrazu, vertikální osa intenzitu výstupního pixelu. Vyznačení na horizontální ose odpovídá rozsahu zvýrazňovaného kontrastu vstupního obrazu, na vertikální ose je pak vyznačená výsledná změna intenzity výstupního obrazu. Převzato z [15]. 21
28 3.2.2 Zostřování obrazu Aby bylo možné rozlišit a identifikovat jednotlivé objekty a tvary v obraze, je mimo dobrý kontrast potřebná i dostatečná ostrost hran. Pokud jsou hrany ostré, obraz se pak člověku jeví detailnější, a tak i kvalitnější. Hranu můžeme specifikovat v prostorové oblasti jako části obrazu, kde se náhle a výrazně mění hodnota jasu. Ve frekvenční oblasti jsou hrany vnímány jako části obrazu s vysokou prostorovou frekvencí. Obecně je hrana popsána jako vektorová veličina, která je definována svou velikostí a směrem. Velikost (3.6) a směr (3.7) vektoru získáme z gradientu obrazové funkce. [15] f(x, y) = ( f x ) 2 + ( f y ) 2 (3.6) θ(x, y) = arctan ( f f ) (3.7) x y Jak je možné vidět na obrázku níže, určitým problémem může být hrana v zašuměném obraze, jelikož šum se v obraze také jeví jako určitá náhlá změna hodnoty jasu. Obr. 12: Schematické znázornění profilů hran v obraze. Převzato z [18] Zostřování hran může probíhat jak v prostorové, tak ve frekvenční oblasti. Podstatou je získání co nejstrmějšího a nejvyššího profilu hrany, resp. zvýšení podílu vysokofrekvenčních složek obrazu. Zostřování hran tedy můžeme rozumět jako zpracování obrazu filtrem typu horní propust, který odfiltruje složky o nízké frekvenci, čímž zvýrazní vyšší frekvence obsahující detaily, resp. hrany. 22
29 V prostorové oblasti je proces zostřování realizován pomocí lokálních konvolučních operátorů. Pokud jsou hrany rozostřené pouze v určitém směru, používá se anizotropní operátor (např. Sobelův). Častěji však bývá zapotřebí zostřit všechny hrany bez ohledu na směr rozostření a používá se izotropní operátor (Laplaceův). Obr. 13: Schematické znázornění profilu hrany při procesu zostřování hran Jak již bylo zmíněno, problémem je zostřování zašuměného obrazu. Šum má vysokofrekvenční charakter, proto je při zostřování hran v podstatě zdůrazňován a výsledný obraz pak obsahuje více šumu. [15] Potlačování šumu Další základní metodou pro zvýrazňování obrazu je potlačování šumu. Z důvodu nedokonalosti zobrazovacích systémů, přenosu 2D signálu a náhodných chyb při jeho digitalizaci, je přítomnost šumu v obraze takřka nevyhnutelná. Šum se podle jeho vlastností dělí do několika kategorií. Podle jeho amplitudy a prostorové distribuce můžeme šum dělit na šedý šum, který většinou postihuje všechny pixely obrazu, má spojité rozdělení amplitud, často Gaussovské (př. Gaussovský šum), a impulsní šum, který postihuje pouze izolované pixely (případně malé skupiny pixelů) a má velkou amplitudu až limitní hodnoty černé a bílé (šum sůl a pepř ). V závislosti na tom, jakým způsobem šum ovlivňuje hodnoty pixelů, jej dělíme na aditivní hodnota šumu se k hodnotám intenzity pixelů přičítá, a multiplikativní intenzita pixelů obrazu je znásobena hodnotami šumu. Podle spektrálního obsahu se šum dělí na širokopásmový, nebo úzkopásmový. Poslední kritériem dělení je závislost šumu na obsahu obrazu nezávislý na obsahu obrazu (tepelný šum, impulsní šum) a závislý na obsahu obrazu. 23
30 Podle dostupných apriorních znalostí o charakteru šumu jsou používány různé metody potlačování šumu. V zásadě těmto metodám můžeme rozumět jako filtry typu dolní propust, které odstraňují vysokofrekvenční složku, resp. šum. Zde však vzniká základní problém této metody, přesně opačný v případě zostřování obrazu. S odfiltrováním vyšších frekvencí, které nenesou pouze šum, ale i detaily obrazu, dochází zároveň ke ztrátě ostrosti obrazu. Výsledný obraz tedy obsahuje méně šumu, avšak může být rozostřený. Proto se musí volit kompromis mezi zostřováním obrazu a potlačením šumu, který obsahuje. [15] Příkladem operace potlačení šumu může být tzv. průměrování. Tato metoda se používá pro potlačení širokopásmového Gaussovského šedého šumu. Tento šum většinou postihuje všechny pixely obrazu a má nulovou střední hodnotu. Metoda průměrování je založena na předpokladu, že hodnota intenzity pixelu zašuměného obrazu je dána součtem intenzity pixelu a hodnoty šumu. Zatímco se hodnoty intenzity pixelu na totožných místech v jednotlivých vzorcích vstupujících do průměrování příliš nemění, hodnoty šumu mají rozptyl větší. Proto se při průměrování hodnoty šumu vzájemně vykompenzují a hodnota intenzity pixelu bývá zachována. Průměrování může být realizováno dvěma způsoby. Pokud máme N identických (příp. skoro identických) obrazů, průměrování může být provedeno globálně, tedy zprůměrováním všech N obrazů. V případě, že máme pouze jeden obraz, nebo se snímaná scéna mění, je možné využít prostorového průměrování, tzv. vyhlazování. Tato metoda aplikuje na obraz konvoluční lokální operátor, který má průměrovací charakter. Výsledná hodnota intenzity pixelu g i,k je pak dána g(i, k) = c m.n f m,n ; (m, n) A i,k (3.8) A i,k kde A i,k je okolí zpracovávaného pixelu na pozici (i,k) a c m,n jsou váhy masky. [15] Typickým příkladem masky, která se používá na prostorové průměrování, je Gaussova maska, která obsahuje hodnoty s Gaussovským rozložením: [ 2 4 2] (3.9)
31 Wienerův filtr Wienerův filr je adaptivní lineární filtr, jehož výhodou je relativní zachování hran ve filtrovaném obraze. Výsledný obraz f Wienerovy filtrace je odhadem obrazu f, který není poškozený šumem. Tento odhad je založen na minimalizaci střední kvadratické odchylky těchto dvou obrazů [19]: e 2 = ℇ {(f(i, j) f (i, j)) 2 } (3.10) kde ℇ označuje průměr. Tam, kde je odchylka větší, vyhlazení Wienerovým filtrem je malé. Kde je odchylka malá, vyhlazení je intenzivnější. Obr. 14: Diagram Wienerovy filtrace. W reprezentuje Wienerův filtr, y(i,j) je výstupní obraz, d(i,j) je obraz bez šumu, e(i,j) je pak střední kvadratická odchylka. Ve frekvenční oblasti je Wienerův filtr definován následovně [15]: M(u, v) = 1 H(u, v) H(u, v) 2 H(u, v) 2 + S vv(u, v) S ff (u, v) (3.11) kde H(u,v) reprezentuje systém způsobující poškození obrazu, S ff (u,v) je výkonové spektrum původního obrazu, S vv (u,v) pak výkonové spektrum šumu. 3.3 Metody obrazové analýzy Metody obrazové analýzy ve zpracování obrazu slouží k získání určitých informací z obrazu, které jsou následně analyzovány automaticky, nebo umožňují snadnější 25
32 a přesnější vizuální analýzu člověkem. Výstupem může být například obraz rozdělený do segmentů, které zvýrazňují jednotlivé objekty v obraze. Následně pak můžeme měřit jejich rozměry a objem. Základními dvěma metodami obrazové analýzy jsou hranová detekce a segmentace obrazu Detekce hran Jak již bylo zmíněno v kapitole 3.2.2, hrany jsou velmi důležité elementy v obraze. Hrany, jakožto náhlé a velké změny intenzity sousedních pixelů obrazu, většinou značí hranice objektů v obraze. Proto je jejich detekce zásadní pro následnou segmentaci obrazu při segmentaci na základě detekce hran. Detekce hran bývá realizována na základě zkoumání změny intenzity sousedních pixelů. Ta je dána absolutní hodnotou velikosti gradientu obrazové funkce (viz rovnice 3.6). Aby bylo možné určit, jak velká změna intenzity v obraze reprezentuje hranu, absolutní hodnota gradientu se porovnává s prahovou hodnotou, která je předem nastavena. Zde nastává zásadní problém, a to na jakou hodnotu práh nastavit. V případě, že zvolíme příliš nízkou hodnotu prahu, sice dojde k požadované detekci skutečných hran, avšak detekovány jsou i falešné hrany, tedy hrany, které neodpovídají hranicím objektu, ale např. šumu, který nebyl dostatečně potlačen. Naopak, při volbě vyšší hodnoty prahu, falešné hrany detekovány nejsou, současně však nemusí být detekovány i skutečné hrany. Pro úspěšnou detekci hran je tedy zásadní nastavení optimální hodnoty prahu. To většinou probíhá experimentálně na základě vizuálního zhodnocení výsledného binárního obrazu, často však za cenu kompromisů. Tento binární, resp. černobílý obraz tvoří mapu hran zpracovávaného obrazu, kde bílé oblasti (jedničky) reprezentují detekované pixely, které tvoří hranu, a černé oblasti (nuly) tvoří pozadí. [15], [20] V procesu detekce hran jsou jednotlivé směrové derivace aproximovány pomocí lokálních konvolučních operátorů. Příkladem takového operátoru může být Sobelův operátor, který je tvořen dohoromady 8 směrovými maskami [15]: 26
33 h 0 = [ ] h 1 = [ 1 0 1] h 2 = [ 2 0 2] h 3 = [ 1 0 1] h 4 = [ ] h 5 = [ 1 0 1] h 6 = [ 2 0 2] h 7 = [ 1 0 1] (3.12) Detekce hrany a určení jejího směru pro každý pixel získáme nalezením maxima podle [15]: g i,k = (max j ( j g i,k ) T); θ i,k = j max 45 (3.13) kde j max udává řád masky, která dává maximum absolutní odezvy a T je zvolená hodnota prahu. Dalšími příklady lokálních konvolučních operátorů, které se používají pro detekci hran, jsou Prewittův, Kirschův, Robertův nebo Laplaceův operátor Cannyho detektor Speciálním druhem hranového detektoru je Cannyho detektor. Je to komplexní algoritmus, jež se sestává z několika kroků, které budou popsány. Tento detektor je založen na třech hlavních kritériích [20], [21]: 1. Nízká chybovost: Maximalizace pravděpodobnosti detekce opravdové hrany a minimalizace pravděpodobnosti detekce hrany falešné způsobené šumem. 2. Správná lokalizace hran: Detekované hrany by měly být, co se týče vzdálenosti, co nejblíže hranám opravdovým. 3. Počet detekovaných hran: Jedna opravdová hrana by neměla být detekována více než jednou a vytvořit tak více jak jednu detekovanou hranu. Samotná detekce hran je rozdělena do 5 fází: 27
34 1. Vyhlazování obrazu: Je nevyhnutelné, že při sběru obrazových dat dochází k zašumění obrazu (viz kapitola 3.2.3). Proto je pro dodržení výše zmíněných kritérií nutné šum odstranit. Toho je dosaženo použitím Gaussova filtru. Filtrace je provedena konvolucí vstupního obrazu f(x,y) a Gaussovy masky G(x,y) (viz (3.9)), tedy: f s (x, y) = G(x, y) f(x, y) (3.14) 2. Zjištění gradientu: Hrana je popsána jako vektorová veličina o určité velikosti a směru (viz kapitola 3.2.2). Dalším krokem je tedy výpočet velikosti a směru gradientu v každém bodě obrazu podle rovnic (3.6) a (3.7). Výsledkem je obraz reprezentující velikost a směr gradientu. 3. Potlačení ne-maximálních hodnot: Dalším krokem je v podstatě zúžení a zostření detekovaných hran v obraze obdrženém z kroku 2. Toho lze dosáhnout ponecháním lokálních maxim hrany, tedy hodnot, které nejpřesnějí odpovídají reálné hraně, protože gradient je v tomto místě největší, a potlačením všech ostatních hodnot [21], [20]. Jedním ze způsobů provedení této operace je zaokrouhlení směru gradientu θ(x,y) na nejbližších 45. Okolí jednoho pixelu v jednotlivých 45 skocích je tvořeno všemi jeho přímo sousedícími pixely, viz Obr. 15. Obr. 15: Pixely sousedící středovému elementu ve 45 skocích. Hodnota pixelu ve středové pozici je porovnána s hodnotami pixelů sousedících ve směru a proti směru gradientu. Tedy pokud gradient středového pixelu po zaokrouhlení směřuje nahoru (90 ), sousedící pixely pro srovnání jsou horní a dolní, resp. ve směru 90 a -90. Pokud je hodnota středového pixelu větší než 28
![hodnoty daných sousedních pixelů, je zachována, pokud větší není, je potlačena [21]. Obr. 16: Ilustrace 3. kroku Cannyho detektoru. Šipky udávají směr gradientu, číselná hodnota je velikost gradientu.](/docs-images/52/28923530/images/35-0.png "Výsledné ponechané pixely jsou vyznačeny bílým obrysem. Převzato z [21]. 4. Dvojité prahování: Výsledkem předchozího kroku je obraz detekovaných zúžených hran.")

35 hodnoty daných sousedních pixelů, je zachována, pokud větší není, je potlačena [21]. Obr. 16: Ilustrace 3. kroku Cannyho detektoru. Šipky udávají směr gradientu, číselná hodnota je velikost gradientu. Výsledné ponechané pixely jsou vyznačeny bílým obrysem. Převzato z [21]. 4. Dvojité prahování: Výsledkem předchozího kroku je obraz detekovaných zúžených hran. Je však pravděpodobné, že mezi správně detekovanými hranami budou i hrany falešné způsobené např. šumem. Canny detektor využívá dvou prahů T H a T L, kdy T H > T L. Pixely hran větší než T H jsou ponechány a označeny jako silné hrany. Pixely s hodnotou mezi T H a T L jsou také ponechány a označeny jako slabé hrany. Hrany s nižší intenzitou než T L jsou potlačeny [21]. Obr. 17: Dvojité prahování pixely znázorněné bílou barvou svou intenzitou přesahují vysoký práh T H, tvoří tak silnou hranu, intenzity pixelů mezi prahy jsou znázorněny šedou barvou, tvoří slabé hrany, hodnoty pixelů pod úrovní spodního prahu T L jsou potlačeny. Převzato z [22]. 5. Propojení hran: Posledním krokem Cannyho algoritmu je propojení detekovaných hran. Jelikož je nepravděpodobné, že by šum po vyhlazení při jeho detekci a prahování mohl tvořit silnou hranu, tyto hrany jsou automaticky považovány za hrany opravdové. Slabé hrany však mohou být tvořené 29
36 i detekovaným šumem. Proto jsou do výsledného obrazu zakomponovány pouze ty slabé hrany, jejichž pixely přímo sousedí s pixely silných hran [21], [20] Segmentace obrazu Segmentace obrazu je druhou zásadní metodou obrazové analýzy. Cílem této operace je vymezit a rozdělit obraz na oblasti, které reprezentují různé objekty. Formálně je proces segmentace popsán jako rozdělení celé oblasti obrazu R na dílčí obrazy, resp. segmenty {R 1, R 2,, R s }. Výsledkem pak může být detekce a vyznačení orgánů, cév, kostí nebo v našem případě buněk, resp. shluků buněk. V dnešní době již existuje mnoho segmentačních metod, které však mají vždy určité společné rysy. Jednotlivé metody se pak dají rozdělit podle dvou kritérií. Prvním kritériem je parametr, na základě kterého segmentace probíhá. Parametrem může být hodnota intenzity pixelu, hodnota gradientu obrazové funkce nebo analýza textury. Výsledný obraz má binární charakter bílé oblasti reprezentují vymezené objekty, černé odpovídá pozadí. Příkladem segmentační metody pracující s intenzitou pixelů je segmentace prahováním. Tato metoda vychází z předpokladu, že určité části obrazu, reprezentující jednotlivé objekty, mají relativně homogenní charakter, co se týče intenzity jejich pixelů. S využitím prahů pak dojde k oddělení jednotlivých objektů od pozadí. Problémem u této metody je, stejně jako u detekce hran, nastavení hodnoty prahu. Nastavení prahů může být provedeno experimentálně, kdy jsou nastavovány různé hodnoty prahů a výsledek segmentace je ihned zobrazen a zhodnocen. Druhou možností je nastavení prahů pomocí histogramu obrazu. Pokud se jednotlivé objekty v obraze výrazně liší svou intenzitou, tato odlišnost se projeví i v histogramu. Prahy pak nastavíme pomocí detekcí minim v histogramu. V případě, že se však jednotlivé objekty svou intenzitou prolínají, není možné s přesností určit jejich přesné hranice intenzity a výsledek takové segmentace může být velmi chybový [15]. 30
37 Obr. 18: Histogramy tří objektů A, B, C. Vlevo se objekty svou intenzitou výrazně liší, vpravo se objekty překrývají. Převzato z [15]. Segmentační metody, které pracují s výše zmíněnými parametry, se mohou dělit také podle techniky, kterou segmentaci provádíme. Takto můžeme metody rozdělit do tří skupin: segmentace na základě regionů (oblastí) v obraze, segmentace na základě detekce hran a segmentace pomocí klasifikačních technik. První dvě zmíněné metody využívají podobností parametrů uvnitř určité oblasti, resp. odlišností mezi parametry v rozdílných oblastech. Segmentace pomocí klasifikačních technik využívá apriorních znalostí o zkoumaných objektech, na základě kterých je možné jednotlivé pixely rozdělit podle jejich hodnot, a tak vymezit dané oblasti. [23], [15] Segmentace na základě narůstání oblastí je jednou z nejstarších metod segmentace obrazu [15]. Je založena na myšlence, že jednotlivé části obrazu (objekty) mají relativně homogenní charakter (viz předchozí odstavec). Segmentace probíhá tak, že je určen pixel uvnitř každé potenciální oblasti pro segmentaci. Tento pixel je popsán určitým parametrem p s (např. intenzita pixelu), který je pro danou oblast typický. Poté se k tomuto počátečnímu pixelu, a následně dalším, přidávají jejich přímo sousedící pixely s parametrem p j, které splňují předem určené kritérium homogenity: p s p j T (3.15) Pokud tato podmínka není splněna, pixel j nepatří do dané oblasti. Modifikací této metody můžeme dosáhnout lepších výsledků, když kritérium homogenity upravíme na 31
38 p i p j T (3.16) kde p i je hodnota parametru již zakomponovaného pixelu do dané oblasti. Takto může docházet k pozvolným změnám parametru p i uvnitř objektu. Narůstání oblasti se v tomto případě zastaví, když dojde k náhlé, velké změně p i, což pravděpodobně odpovídá hranici objektu. Algoritmus je ukončen, když jsou všechny pixely obrazu přiřazeny do jednotlivých oblastí [15]. Základní metodou využívající hodnoty gradientu obrazové funkce, je segmentace na základě detekce hran. Tato metoda je založena na předpokladu že hranice objektu je v obraze reprezentována náhlou, velkou změnou hodnot intenzity sousedních pixelů, resp. hranou. Tyto hrany jsou detekovány pomocí hranového operátoru (viz 3.3.1). Pokud jsou hrany detekovány správně, jsou tvořeny spojitou, tenkou linií a nejsou detekovány falešné hrany, výsledná křivka reprezentující detekované hrany by měla být uzavřená. Potom vnitřek této křivky je hledaná oblast pro segmentaci. Bohužel, z důvodů nedokonalosti jak samotného obrazu (šum, nevýrazné hrany, další nepotřebné objekty), tak metod detekce hran, často bývají detekované hrany nespojité. Navíc, kvůli kompromisnímu nastavení hodnoty prahu, bývají detekovány i falešné hrany, které neodpovídají hranicím segmentovaného objektu. Proto je zapotřebí obraz reprezentující detekované hrany dále zpracovat pomocí morfologických operací. 3.4 Morfologické operace Morfologické transformace obrazu jsou operace, které se nejčastějí aplikují na binární obrazy, je však možné je použít i na obrazy ve stupních šedi. Tyto operace umožňují odstranění falešně detekovaných objektů za účelem elementární analýzy velikosti, tvaru a počtu elementů v obraze [15], [20]. Dále také v případě, že např. detekovné hrany nejsou spojité, morfologické transformace umožňují protažení těchto hran, čímž dojde k jejich propojení, a tedy utvoření celistvé hrany. V této práci jsou morfologické operace popsány a prezentovány pouze na binárních obrazech. Morfologické operace, jsou realizovány pomocí morfologických operátorů. Těmi základními jsou eroze a dilatace. Jejich vzájemné kombinace pak mohou tvořit morfologické otevírání, uzavírání obrazu nebo hit or miss transformace. Použitím tzv. strukturovacího elementu, což je v podstatě lokální maskový operátor, který je 32
![postupně posouván celým obrazem (viz kapitola 3.1.2), dochází k morfologickým transformacím [15]. Tyto masky obvykle nabývají binárních hodnot.](/docs-images/52/28923530/images/39-0.png "Často se používají masky o velikosti 3x3, avšak využití masek větších rozměrů nebo anizotropních masek nepravidelných tvarů je také možné.")
39 postupně posouván celým obrazem (viz kapitola 3.1.2), dochází k morfologickým transformacím [15]. Tyto masky obvykle nabývají binárních hodnot. Často se používají masky o velikosti 3x3, avšak využití masek větších rozměrů nebo anizotropních masek nepravidelných tvarů je také možné. Příkladem mohou být masky tvaru kříže, disku, diamantu nebo linie. Obr. 19: Příklady masek pro morfologické operace. Vlevo nahoře maska tvaru diamantu, vpravo nahoře maska tvaru disku, dole maska tvaru linie s možným nastavením sklonu. Origin udává střed masky, R její poloměr, LEN a DEG délku a sklon linie Dilatace Dilatace je základní morfologická operace používaná pro zvětšování nebo narůstání objektů v obraze [24]. Mechanismus této operace je podobný prostorové konvoluci. Při dilataci je maska, tedy strukturovací element, posouvána obrazem. V případě, kdy maska tvořená jedničkami, překryje část obrazu, ve které jsou také jedničky, resp. bílé oblasti, na pozici středu masky (origin) je uložena jednička. Tedy výstupní obraz je tvořen hodnotami 1 na každé pozici středu strukturovacího elementu tam, kde strukturovací element překrýval alespoň jeden pixel s hodnotou 1 vstupního obrazu [24]. Tímto lze dosáhnout vyplnění malých děr v objektu nebo propojení objektů, které nejsou navzájem propojeny (např. detekované hrany). K těmto požadovaným výstupům však dochází za cenu zvětšení celého objektu [15], který pak přesně neodpovídá vstupnímu obrazu. 33
40 Pokud A reprezentuje vstupní obraz, B strukturovací element, pak dilatace A B je dána jako množinová operace A B = {z (B ) z A } (3.17) kde z jsou pozice středu strukturovacího elementu a je prázdná množina. Výsledný obraz je množinou všech středů strukturovacího elementu B, kdy B překrývá alespoň jeden element vstupního obrazu A [24]. 34
41 Obr. 20: Průběh dilatace. Nahoře vstupní obraz tvaru obdelníku a strukturovací element, uprostřed překrývání strukturovacího elementu a obrazu, dole výsledný dilatovaný obraz. Převzato z [24] Eroze Eroze je operace, které zmenšuje, resp. zužuje objekty v binárním obraze [24]. Opět dochází k posouvání strukturovacího elementu po obraze. Avšak na rozdíl od dilatace, výstupní obraz na pozicích středu strukturovacího elementu nabývá hodnoty 1 pouze, když se celý strukturovací element vejde do daného objektu tvořeného jedničkami. Tedy na pozici středu strukturovacího elementu je uložena jednička pouze tehdy, když maska překrývá jenom pixely o hodnotě 1, resp. nepřekrývá žádné pixely pozadí obrazu. [24] Takto lze dosáhnout odstranění malých, falešně detekovaných objektů, do kterých se strukturovací element nevejde. Opět však za cenu toho, že dojde ke zmenšení celého objektu [15]. Eroze vstupního obrazu A a strukturovacího elementu B je dána množinovou operací A B A B = {z (B) z A} (3.18) Výsledný obraz A B je množina všech středů strukturovacího elementu z takových B, která jsou celé obsažené v A [24]. 35
42 36
43 Obr. 21: Průběh eroze. Nahoře vstupní obraz a strukturovací element, uprostřed překrývání strukturovacího elementu a obrazu, dole výsledný obraz po erozi. Převzato z [24] Otevírání a uzavírání obrazu Jak již bylo zmíněno, morfologické operace otevírání a uzavírání obrazu jsou pouze kombinacemi dilatace a eroze. Často se však tyto kombinace využívají spíše než samotná eroze či dilatace. Erozí dojde k odstranění malých nepotřebných objektů a výčnělků, dilatace vede k odfiltrování děr a mezer. Nechtěným výstupem těchto operací je změna velikosti objektu. Tomu je možné se zčásti vyhnout v použitím stejného strukturovacího elementu pro erozi i dilataci. V takovém případě je eroze částečně komplementární dilataci, a naopak. Velikost erozí zmenšeného objektu je dilatací stejným strukturovacím elementem přibližně obnovena. Opačně, dilatací zvětšený objekt je pak erozí také přibližně obnoven. Takto je dosaženo odfiltrování nechtěných objektů z obrazu se zachováním původní velikosti požadovaného objektu [15]. Morfologické otevírání obrazu A B je definováno jako eroze obrazu A strukturovacím elementem B následovaná dilatací výsledného obrazu elementem B, tedy [24]: A B = (A B) B (3.19) Naopak morfologické uzavírání obrazu A B je dilatace obrazu A elementem B a jeho následná eroze pomocí B [24]: A B = (A B) B (3.20) 37
44 4 ANALÝZA KONTRAKTILITY Analýza kontraktility kardiocytu na základě snímání mikroskopických obrazů může probíhat dvěma základními metodami. Tyto je možné rozdělit podle předmětu zaměření. Zaměření může být na vnitřní strukturu buňky, tedy na zkracování sarkomer [4], [25-28]. Tato je realizována převážně světelnou difrakční technikou. Druhá metoda se zaměřuje na snímaní obrazů celého myocytu a následné zpracování tohoto obrazu. Analýza probíhá měřením velikosti kardiocytu, resp. jeho délky od jednoho konce ke druhému [1], [3-6], nebo analýzou změn jeho tvaru [26]. 4.1 Analýza pomocí měření periodicity sarkomer Metody světelné difrakce se pro měření periodicity sarkomer pruhovaných svalů používají již od konce 19. stol. [4]. Dnes se jako zdroj světla u těchto metod používá laser. Difrakční metody jsou vysoce závislé na časovém a prostorovém rozlišení výsledného obrazu. Obojí je zajištěno pomocí CCD detektorů (charge-coupled device) a tak tyto metody poskytují dobré výsledky. Jejich nevýhodou je však velká náchylnost na pohyb kardiocytu. Při kontrakci se buňka může posouvat a rotovat, což ovlivňuje měření [1], [4]. 4.2 Analýza pomocí měření velikosti kardiocytu Tyto metody analýzy kontraktility jsou realizovány na základně digitálního zpracování obrazu. Obrazová data ve formátu videa, jsou pro tyto metody nejčastěji nasnímány pomocí PCM nebo DIC (viz kapitola 2.1), jež poskytují kvalitní kontrastní snímky. Zpracování videa, které probíhá snímek za snímkem, je založeno na detekci hranic kardiocytu, jeho segmentaci a následné měření jeho délky, obsahu nebo porovnávání tvarů pomocí korelace. Při těchto metodách je důležitým prvkem natočení a zachycení kardiocytu v určitém směru. To bývá nejlépe na střed obrazovky a ve směru rovnoběžném s rastrem obrazu, resp. s horizontální osou. Speciálně při analýze kontraktility pomocí měření délky kardiocytu je nasměrování důležité. Případné rotace a translace kardiocytu jsou pak, stejně jako u difrakčních metod, hlavním zdrojem chyb měření. Dalším zdrojem chyb mohou být různé nedokonalosti samotného kardiocytu necelistvé a roztřepené hranice kardiocytu [1], [3], [26]. 38
45 4.2.1 Zpracování snímků buněk srdce Celý proces zpracování snímků kardiocytů je možné rozdělit do tří fází. První je předzpracování obrazu. Zde můžeme zařadit metody, které vedou ke zlpešení vizuálního vjemu obrazu a zvýšení úspěšnosti následných procesů zpracování. Jedná se o metody zmíněné v kapitole 3.2. Ve druhé fázi dochází k základnímu analytickému zpracování obrazu. Používají se segmentační metody a morfologické transformace (viz kapitoly 3.3 a 3.4). Posledním krokem je pak samotná analýza obrazu, v našem případě tedy měření velikosti nebo obsahu kardiocytu nebo korelační analýza. Předzpracování Ve fázi předzpracování dochází k odfiltrování šumu z obrazu a jeho ostření. Na základě vzhledu obrazu je však nutné volit mezi těmito metodami. Jestliže obraz obsahuje šum, jak tomu ve většině případů bývá, metody zvýrazňování hran by sice vedly k jejich zostření, ale zároveň by také zdůraznily šum, což by vedlo k obtížnější segmentaci obrazu. Proto se v tomto kroku volí spíše odstranění šumu i přes to, že je doprovázeno rozostřením obrazu. Techniky potlačení šumu jsou voleny podle toho, jaký typ šumu obraz obsahuje. Pokud je obraz znehodnocen impulsním šumem (šum sůl a pepř ), používá se mediánový filtr. Okno, nejčastěji o velikosti 3 x 3, prochází obrazem. Hodnoty intenzit pixelů obsažené v okně se seřadí od nejmenší po největší a na pozici středu okna se uloží medián. Pokud má šum nulovou střední hodnotu, účelné je použít Gaussovský filtr popsaný v kapitole Celkově je však potřeba volit kompromis mezi odstraněním šumu a ztátou ostrosti hran. Vzhledem k tomu, že pro další zpracování obrazu je potřebné zachování hran v obraze, je vhodné použití některé z metod adaptivního filtrování. Základní možností je Wienerův adaptivní filtr, jehož popis je uveden v kapitole Další možností je vyhlazování obrazu metodou totální variace zachovávající hrany, která je popsána v [1]. Je také možné využít techniky, která vede ke kontrastnímu zvýraznění kardiocytu oproti jeho pozadí. Tato metoda je zmíněna v [5]. Šedotónový obraz z mikroskopu je podroben morfologické transformaci uzavírání (kapitola 3.4.3). Výsledek morfologické operace je pak odečten od původního obrazu, čímž dojde k onomu zvýraznění. 39
46 Segmentace Segmentaci je možné provádět metodami uvedenými v kapitole Výsledky jednotlivých metod však záleží na kvalitě výstupu předchozí fáze. Základní metoda prahováním je sice implementačně nejjednodušší, ale poskytuje kvalitní výsledky pouze když je kardiocyt dostatečně kontrastní oproti pozadí [3], [5], [27]. Práh je možné zvolit heuristicky nebo na základě předchozí analýzy histogramu obrazu. Vzhledem k povaze kardiomyocytu je ohraničen sarkolemou, na které dochází k výraznému útlumu a rozptylu procházejícího světla, což vede k vytvoření tmavé křivky obklopující kardiomyocyt [3], je vhodné provádět segmentaci na základě detekce hran. Tato tmavá křivka je oproti okolí reprezentována vysokou hodnotou gradientu (viz 3.2.2), která může být detekována hranovým detektorem. Jednou z možností je Cannyho detektor. Detekce hran však bývá komplikovaná z několika důvodů. I přesto, že sarkolema vytváří vysoké rozdíly v kontrastu, v některých místech může být sarkolema poškozena nebo špatně zaostřena, což vede k jejímu upozadění. Poté je její detekce v daných místech nepřesná. Se správně detekovanými hranami kardiomyocytu může současně dojít i k detekci falešných hran; buďto objektů mimo předmět zájmu, nebo hran tvořených velkými změnami intenzity, které se kvůli nedostatečnému vyhlazení mohou objevit uvnitř nebo mimo buňku. Tento problém je částečně potlačen použitím Cannyho detektoru. [3], [21] Výsledná křivka reprezentující hrany často bývá nespojitá a proto je nutné ji upravit morfologickými operacemi. Tyto jsou popsány v kapitole 3.4. Dochází k propojení nespojitých hran jejich dilatací, vyplnění děr v segmentu kardiocytu, odstranění falešně detekovaných objektů a vyhlazení finálního objektu erozí. Výsledný obraz, ze kterého může být extrahována kontura, by pak měl reprezentovat pouze samotný kardiomyocyt [3], [5], [6]. Diskrétní Fourierovou transformací je možné z výsledného tvaru získat Fourierovy deskriptory, které se také využívají pro hodnocení tvaru buňky [1]. Měření velikosti a tvaru buňky Měření velikosti, resp. délky kontrahujícího se kardiocytu, je možné pomocí nalezení jeho konců. To bývá realizováno detekcí změn intezity (sarkolema) v řádkovém profilu obrazu. V profilu jsou přítomny dva extrémy, první reprezentující začátek, druhý konec kardiocytu, které jsou detekovány překročením nastaveného prahu. Signál představující kontrakce buňky je vypočten vzdáleností těchto nalezených extrémů ze všech snímků sekvence. Signál kontrakce je možné změřit i pomocí aproximace vysegmentovaného 40
47 kardiocytu obdélníkem. Vzdálenost dvou konců buňky je v tomto případě rovna delší hraně obdélníku. Předpokladem těchto metod je natočení buňky do horizontálního směru [3], [6]. Další možností, jak získat signál kontrakce kardiocytu, je výpočtem obsahu plohy obrazce ze se segmentace. Tím, že vysegmentovaný obraz je binárního charakteru, pro výpočet plochy v podstatě stačí sečíst všechny jeho hodnoty (jedničky tvoří oblast segmentu, nuly pozadí). Tento způsob není závislý na nasměrování kardiocytu [5]. Signál kontrakce, ve smyslu rozdílu mezi obrazy relaxovaného a kontrahovaného kardiocytu, je možné získat také pomocí geometrické transformace obrazu. Rozdíl mezi relaxovaným a kontrahovaným kardiocytem je možné definovat jako energii deformace těchto obrazů při přechodu mezi jedním a druhým stavem [26]. 4.3 Analýza kontraktility mikroskopem atomárních sil Mikroskopie atomárních sil (AFM) je speciální technika používaná pro 3D zobrazení povrchů vzorků. Hlavním komponentem AFM je sonda v podobě velmi ostrého hrotu, která je upevněna na ohebném nosníku. Tato sonda je posouvána po vzorku s nerovným povrchem, přičemž dochází k deformacím nosníku a jeho posouvání v z-rovině. Změna této polohy je detekována pomocí změn v úhlu laserového paprsku. Výsledný obraz povrchu vzorku je sestaven přenesením závislosti velikosti ohnutí nosníku na poloze sondy na vzorku [28]. Obr. 22: Princip AFM. 41
48 Při analýze kontraktility kardiocytu pomocí AFM nedochází ke skenování vzorku posuvem sondy po povrchu. Sonda je stabilizována v jedné poloze v rovině xy a přiložena na povrch kardiocytu. Při kontrakci a relaxaci dochází k nárůstu, resp. zmenšení jeho velikosti v z-rovině, což je detekováno sondou [29]. 42
49 5 REALIZACE MĚŘENÍ KONTRAKTILITY Tato kapitola popisuje implementaci metody analýzy kontraktility kardiocytu pomocí dektekce jeho konců a následného měření jejich vzdálenosti a pomocí výpočtu celkového obsahu buňky. Implementace byla provedena v programovacím prostředí MATLAB R2013a (verze produktu ) s vzužitím knihovny funkcí pro zpracování obrazu Image Processing Toolbox (IPT). Veškeré zpracování bylo prováděno na osobním počítači s touto konfigurací: procesor Intel Core i5 M480 (2,67 GHz), operační paměť 4 GB DDR3 RAM, grafický procesor NVIDIA GeForce 310M s operačním systémem Windows 8.1. V této práci jsou zpracovávány dvě sekvence snímků izolovaných kardiocytů. Tyto videa jsou ve formátu.avi. Obě mají rozlišení 128x128 pixelů a jsou nasnímány v šedotónové stupnici. V MATLABu jsou data kódována v datovém formátu typu uint8, což značí, že intezity pixelů nabývají hodnot v rozmezí ve smyslu černá až bílá. Byla vytvořena funkce analyzakontraktility.m, která byla použit pro zpracování obou videí. Zpracování a analýza probíhá snímek za snímkem. Vstupními parametry vytvořené funkce jsou: typ filtrace, typ detektoru, název vstupní sekvence snímků, název výstupní sekvence snímků s provedenou segmentací. function [] = analyzakontraktility(f, d, nazev_vstup, nazev_vystup) Obr. 23: Hlavička vytvořené funkce 5.1 Fáze předzpracování Video je nejprve načteno ze souboru pomocí funkce VideoReader, která vytvoří objekt se základními informacemi o dané sekvenci snímků (doba trvání a rozlišení, počet snímků za sekundu, název souboru sekvence snímků a adresářová cesta). Následně je video přečteno a uloženo do proměnné pomocí funkce read. Ve fázi předzpracování bylo provedeno vyhlazení obrazu a zvýraznění kontrastu kardiocytu oproti pozadí. Vyhlazení bylo prováděno dvěma metodami první je Wienerova filtrace (viz kapitola ). Druhým způsobem vyhlazení byla Gaussova filtrace. Wienerova filtrace byla provedena použitím základní funkce z IPT wiener2. Vstupními parametry této funkce jsou vstupní obraz, velikost masky a odhad energie 43
). Výsledné obrazy (Obr. 24 a Obr.")
50 šumu. Velikost masky byla zvolena 3x3 a odhad energie šumu byl ponechán na samotné funkci. V druhém případě byla filtrace provedena konvolucí obrazu kardiocytu a lokálního operátoru s Gaussovským rozložením hodnot (viz (3.9)). Výsledné obrazy (Obr. 24 a Obr. 25) byly použity pro následnou segmentaci a její výsledky vizuálně porovnány. Obr. 24: Vlevo nahoře originální obraz, uprostřed filtrace Wienerovým filtrem, vpravo Gaussova filtrace, vlevo dole obraz po morfologické operaci, vpravo dole obraz po odečtení od filtrace Wienerovým filtrem. 44


51 Obr. 25: Stejné kroky zpracování aplikované na druhou sekvenci. Po filtraci dochází ke zmíněnému zvýšení kontrastu mezi kardiocytem a jeho pozadím. Pro tento účel byl použit následující postup. Morfologickou transformací uzavírání (3.4.3) byl vytvořen obraz reprezentující vnitřní prostor kardiocytu bez tmavé sarkolemy. Při odečtení tohoto obraz od původního filtrovaného obrazu, dojde ke zvýraznění kontrastu sarkolemy a vnitřního prostoru buňky oproti pozadí. Strukturovacím elementem pro tuto operaci byl zvolen disk o poloměru 4 elementů. Průběh a výsledek těchto kroků je prezentován v Obr. 24 a Obr. 25. Obr. 26: Strukturovací element typu disk a poloměru 4. 45
52 5.2 Segmentace Pro segmentaci kardiocytu byla zvolena metoda založená na detekci hran objektu. Důvodem je využití kontrastní sarkolemy kardiocytu. Segmentaci můžeme rozdělit na detekci hran a následné morfologické transformace Detekce hran Detekce hran v obraze je realizována pomocí tří různých hranových operátorů: Sobelův operátor, Laplaceův operátor a Cannyho detektor. Hrany byly detekovány v obraze po zvýšení kontrastu. Výsledné obrazy jsou dále morfologicky zpracovány a úspěšnost detekce hran je pak vizuálně zhodnocena. Sobelův operátor je tvořen 8 směrovými maskami (rovnice (3.12)). Tyto masky realizují aproximaci velikosti gradientu v obraze v každém z osmi směrů. Výsledný pixel reprezentující hranu je dán výběrem maxima gradientu z osmi směrů, jež přesahuje stanovený práh (rovnice (3.13)). [15] Laplaceův operátor je založen na metodě zero-crossing. Aplikací Laplaceova diferenciálního operátoru L (6.16) na vstupní obraz získáme obraz reprezentující 2. derivaci jeho hodnot. V oblasti hrany 2. derivace prochází nulou, resp. dochází ke změně znamének (viz Obr. 27). Tato změna znamének je detekována pomocí masky m (5.1) a pixel v daném místě je označen za hranu, pokud jsou splněny všechny L = [ 1 8 1] m = [ 1 x 1] (5.1) z následujících podmínek: alespoň jeden ze sousedních pixelů má opačné znaménko než ostatní; rozdíl maximálních hodnot s opačnými znaménky v masce musí být větší než stanovený práh; daný zkoumaný pixel leží uprostřed masky (pozice x) mezi hodnotami s opačnými znaménky. V případě, že je jedna z podmínek porušena, pixel není označen za hranu [15]. 46
53 Obr. 27: Profily hran originálního obrazu, 1. a 2. derivace. Detekce hran Cannyho operátorem je popsána v kapitole Výsledný obraz je binárního charakteru, kde jedničky reprezentují hrany objektu, nuly pozadí. 47
. Detekce probíhala po použití Wienerovy filtrace. Obr.")
54 Obr. 28: Nahoře originální obraz, dole obrazy detekovaných hran Canny detektor (vlevo), Sobelův operátor (uprostřed), metoda zero-crossing (vpravo). Detekce probíhala po použití Wienerovy filtrace. Obr. 29: Stejné pořadí jednotlivých detekcí hran pro druhou sekvenci. 48
55 5.2.2 Morfologické transformace Ve druhém kroku segmentace byly prováděny morfologické transformace obrazů detekovaných hran. Hrany byly v určitých částech nespojité, proto bylo zapotřebí je protáhnout, vyplnit díry, resp. vnitřek kardiocytu, z okolí odstranit falešně detekované objekty, výsledný útvar zahladit a následně z něj extrahovat konturu. Jednotlivé základní operace, pomocí kterých byly tyto transformace provedeny, jsou popsány v kapitole 3.4. Pro dilataci byly použity 2 strukturovací elementy vektorového typu. Liší se od sebe pouze svou orientací, kdy první z nich realizuje protažení hran v horizontálním směru, druhý pak ve vertikálním směru. Obr. 30: Velikost a tvar strukturovacího elementu pro dilataci hran v horizontálním směru (vlevo) a vertiálním směru (vpravo). Následně dochází k vyplnění vnitřního prostoru kardiocytu. To je provedeno pomocí funkce imfill, která umožňuje vyplnění množiny bodů pozadí, které nemohou být vyplněny pouze pomocí protažení hrany obrazu. Protože takový obraz stále obsahuje falešně detekované objekty, tyto jsou v dalším kroku odstraněny. Kritériem odstranění je jejich velikost. Pokud jsou falešné objekty menší jak stanovená hranice pixelů, jsou odmazány. Dalším krokem je vyhlazení perimetru objektu. K tomu je použita morfologická transformace eroze (kapitola 3.4.2). Eroze je provedena dvakrát za sebou kvůli přílišnému zvětšení perimetru objektu, ke kterému dochází při prvotní dilataci. Při první erozi je použit strukturovací element typu disk o poloměru 2, v opakované erozi pak disk s poloměrem 1. V posledním kroku je ještě jednou provedeno odmazání objektů, které nepatří ke kardiocytu. Důvodem je odstranění objektů, které byly k buňce připojeny úzkou linií, jež byla erozí přerušena. Výsledkem těchto kroků je obraz reprezentující kardiocyt. Z něj je extrahována kontura, která je přičtena do původního obrazu pro zvýraznění kardiocytu. Veškeré mezikroky jsou uvedeny v následujících setech obrázků. 49
, vyplnění objektu (nahoře uprostřed), první odstranění falešných objektů (vpravo nahoře), vyhlazeni objektu (vlevo uprostřed), druhé odstranění")
56 Obr. 31: Jednotlivé kroky morfologických operací při použití Wienerovy filtrace. Dilatace (vlevo nahoře), vyplnění objektu (nahoře uprostřed), první odstranění falešných objektů (vpravo nahoře), vyhlazeni objektu (vlevo uprostřed), druhé odstranění falešných (uprostřed), extrakce kontury (vpravo uprostřed), vysegmentovaný kardiocyt. 50


57 Obr. 32: Jednotlivé kroky morfologických operací pro druhou sekvenci. 5.3 Měření kontraktility Kontraktilita byla zjišťována dvěma způsoby. V prvním z nich dochází k výpočtu obsahu plochy vysegmentovaného kardiocytu. Obsah byl vypočítán sumou všech pixelů obrazu před extrakcí kontury, tedy z objektu, který svým tvarem odpovídá kardiocytu (v Obr. 31 a Obr. 32 to jsou obrazy uprostřed). Druhou realizovanou metodou byl výpočet pomocí vzdálenosti konců kardiocytu. K výpočtu byl použit snímek s vysegmentovaným kardiocytem (v Obr. 31 a Obr
58 snímky dole). V tomto snímku byl po vizuální analýze vybrán jeden řádek, který odpovídal středu buňky. Ve zvoleném řádku probíhalo hledání maximálních hodnot, resp. hodnot křivky tvořící perimetr segmentu, pomocí funkce find. Pozice těchto hodnoty odpovídají pozicím jednomu a druhému konci buňky. Jejich vzájemná vzdálenost pak byla vypočítána pomocí Euklidovské vzdálenosti [15]: C E (a, b) = a b = (a i b i ) 2 N i=1 (6.18) Vypočtené vzdálenosti, resp. velikosti obsahu plochy, tvoří signál kontraktility kardiocytu. Obr. 33: Pofil řádku obrazu kardiocytu s přičtenou konturou. Dvě maxima reprezentují konce kardiocytu. Výpočet vzdálenosti byl ošetřen podmínkou, pomocí které je výsledný graf kontraktility interpolován. V případě, že nedojde ke správné segmentaci a v obraze s vysegmentovaným kardiocytem není detekována jeho kontura, hodnota vzdálenosti 52

59 mezi konci buňky v daném snímku je nahrazena hodnotou vzdálenosti konců ze snímku předchozího. Obr. 34: Vývojový diagram funkce analyzakontraktility.m. 53

60 6 VÝSLEDKY A DISKUZE V této kapitole jsou uvedeny výsledky segmentace pro uvedené metody filtrace a detekce hran. Ty jsou vizuálně zhodnoceny a v případě úspěšné segmentace jsou výsledky použity pro následující analýzu kontraktility. Výsledky analýzy kontraktility jsou uvedeny pro obě metody měření délky a obsahu plochy kardiocytu. 6.1 Výsledky segmentace Segmentace probíhala v obrazech po filtraci Wienerovým a Gaussovým filtrem na základě detekce hran výše zmíněnými detektory. Výsledky pro porovnání detekcí hran pomocí jednotlivých operátorů jsou uvedeny v následujících dvou setech obrázků. Obr. 35: Cannyho operátor (vlevo), Sobelův operátor (uprostřed), zero-crossing metoda (vpravo). Nahoře je předchozí použití Gaussova filtru, dole Wienerova filtru. Sekvence sekv1.avi. 54
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
Fluorescenční mikroskopie
 Fluorescenční mikroskopie Pokročilé biofyzikální metody v experimentální biologii Ctirad Hofr 1 VYUŽITÍ FLUORESCENCE, PŘÍMÁ FLUORESCENCE, PŘÍMÁ A NEPŘÍMA IMUNOFLUORESCENCE, BIOTIN-AVIDINOVÁ METODA IMUNOFLUORESCENCE
Fluorescenční mikroskopie Pokročilé biofyzikální metody v experimentální biologii Ctirad Hofr 1 VYUŽITÍ FLUORESCENCE, PŘÍMÁ FLUORESCENCE, PŘÍMÁ A NEPŘÍMA IMUNOFLUORESCENCE, BIOTIN-AVIDINOVÁ METODA IMUNOFLUORESCENCE
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Optická konfokální mikroskopie a mikrospektroskopie. Pavel Matějka
 Optická konfokální mikroskopie a Pavel Matějka 1. Konfokální mikroskopie 1. Princip metody - konfokalita 2. Instrumentace metody zobrazování 3. Analýza obrazu 2. Konfokální 1. Luminiscenční 2. Ramanova
Optická konfokální mikroskopie a Pavel Matějka 1. Konfokální mikroskopie 1. Princip metody - konfokalita 2. Instrumentace metody zobrazování 3. Analýza obrazu 2. Konfokální 1. Luminiscenční 2. Ramanova
Mikroskopické metody Přednáška č. 3. Základy mikroskopie. Kontrast ve světelném mikroskopu
 Mikroskopické metody Přednáška č. 3 Základy mikroskopie Kontrast ve světelném mikroskopu Nízký kontrast biologických objektů Nízký kontrast biologických objektů Metodika přípravy objektů pro světelnou
Mikroskopické metody Přednáška č. 3 Základy mikroskopie Kontrast ve světelném mikroskopu Nízký kontrast biologických objektů Nízký kontrast biologických objektů Metodika přípravy objektů pro světelnou
Restaurace (obnovení) obrazu při známé degradaci
 obrazu při známé degradaci") Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
Operace s obrazem. Biofyzikální ústav LF MU. Projekt FRVŠ 911/2013
 Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Bioimaging rostlinných buněk, CV.2
 Bioimaging rostlinných buněk, CV.2 Konstrukce mikroskopu (optika, fyzikální principy...) Rozlišení - kontrast Live cell microscopy Modulace kontrastu (Phase contrast, DIC) Videomikroskopia Nízký kontrast
Bioimaging rostlinných buněk, CV.2 Konstrukce mikroskopu (optika, fyzikální principy...) Rozlišení - kontrast Live cell microscopy Modulace kontrastu (Phase contrast, DIC) Videomikroskopia Nízký kontrast
CT-prostorové rozlišení a citlivost z
 CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
CT-prostorové rozlišení a citlivost z Doc.RNDr. Roman Kubínek, CSc. Předmět: lékařská přístrojová fyzika Prostorové rozlišení a citlivost z Prostorové rozlišení význam vyjádření rozlišení měření rozlišení
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
DIGITÁLNÍ FOTOGRAFIE
 DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
DIGITÁLNÍ FOTOGRAFIE Petr Vaněček, katedra informatiky a výpočetní techniky Fakulta aplikovaných věd, Západočeská univerzita v Plzni 19. listopadu 2009 1888, Geroge Eastman You press the button, we do
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Zpracování obrazu a fotonika 2006
 Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
Základy zpracování obrazu Zpracování obrazu a fotonika 2006 Reprezentace obrazu Barevný obrázek Na laně rozměry: 1329 x 2000 obrazových bodů 3 barevné RGB kanály 8 bitů na barevný kanál FUJI Superia 400
13 Barvy a úpravy rastrového
 13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.2487/2011
 Využití v biomedicíně III Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Zpracování přirozeného obrazu Za přirozený obraz považujeme snímek
Využití v biomedicíně III Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Zpracování přirozeného obrazu Za přirozený obraz považujeme snímek
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe. Adam Novozámský (novozamsky@utia.cas.cz)
") NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
Spektrální charakteristiky
 Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Spektrální charakteristiky Cíl cvičení: Měření spektrálních charakteristik filtrů a zdrojů osvětlení 1 Teoretický úvod Interakcí elektromagnetického vlnění s libovolnou látkou vzniká optický jev, který
Fluorescence (luminiscence)
") Fluorescence (luminiscence) Patří mezi luminiscenční metody fotoluminiscence. Luminiscence efekt, kdy excitované molekuly či atomy vyzařují světlo při přechodu z excitovaného do základního stavu. Podle
Fluorescence (luminiscence) Patří mezi luminiscenční metody fotoluminiscence. Luminiscence efekt, kdy excitované molekuly či atomy vyzařují světlo při přechodu z excitovaného do základního stavu. Podle
Viková, M. : MIKROSKOPIE II Mikroskopie II M. Viková
 II Mikroskopie II M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz Osvětlovac tlovací soustava I Výsledkem Köhlerova nastavení je rovnoměrné a maximální osvětlení průhledného preparátu, ležícího
II Mikroskopie II M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz Osvětlovac tlovací soustava I Výsledkem Köhlerova nastavení je rovnoměrné a maximální osvětlení průhledného preparátu, ležícího
Pozorování Slunce s vysokým rozlišením. Michal Sobotka Astronomický ústav AV ČR, Ondřejov
 Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
Pozorování Slunce s vysokým rozlišením Michal Sobotka Astronomický ústav AV ČR, Ondřejov Úvod Na Slunci se důležité děje odehrávají na malých prostorových škálách (desítky až stovky km). Granule mají typickou
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Příklady použití tenkých vrstev Jaromír Křepelka
 Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
ROZ1 - Cv. 3 - Šum a jeho odstranění ÚTIA - ZOI
 Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Viková, M. : MIKROSKOPIE V Mikroskopie V M. Viková
 Mikroskopie V M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz Hloubka ostrosti problém m velkých zvětšen ení tloušťka T vrstvy vzorku kolmé k optické ose, kterou vidíme ostře zobrazenou Objektiv
Mikroskopie V M. Viková LCAM DTM FT TU Liberec, martina.vikova@tul.cz Hloubka ostrosti problém m velkých zvětšen ení tloušťka T vrstvy vzorku kolmé k optické ose, kterou vidíme ostře zobrazenou Objektiv
Omezení barevného prostoru
 Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Konstrukční varianty systému pro nekoherentní korelační zobrazení
 Konstrukční varianty systému pro nekoherentní korelační zobrazení Technický seminář Centra digitální optiky Vedoucí balíčku (PB4): prof. RNDr. Radim Chmelík, Ph.D. Zpracoval: Petr Bouchal Řešitelské organizace:
Konstrukční varianty systému pro nekoherentní korelační zobrazení Technický seminář Centra digitální optiky Vedoucí balíčku (PB4): prof. RNDr. Radim Chmelík, Ph.D. Zpracoval: Petr Bouchal Řešitelské organizace:
3 METODY PRO POTLAČENÍ ŠUMU U ŘE- ČOVÉHO SIGNÁLU
 3 METODY PRO POTLAČENÍ ŠUMU U ŘE- ČOVÉHO SIGNÁLU V současné době se pro potlačení šumu u řečového signálu používá mnoho různých metod. Jedná se například o metody spektrálního odečítání, Wienerovy filtrace,
3 METODY PRO POTLAČENÍ ŠUMU U ŘE- ČOVÉHO SIGNÁLU V současné době se pro potlačení šumu u řečového signálu používá mnoho různých metod. Jedná se například o metody spektrálního odečítání, Wienerovy filtrace,
Speciální spektrometrické metody. Zpracování signálu ve spektroskopii
 Speciální spektrometrické metody Zpracování signálu ve spektroskopii detekce slabých signálů synchronní detekce (Lock-in) čítaní fotonů měření časového průběhu signálů metoda fázového posuvu časově korelované
Speciální spektrometrické metody Zpracování signálu ve spektroskopii detekce slabých signálů synchronní detekce (Lock-in) čítaní fotonů měření časového průběhu signálů metoda fázového posuvu časově korelované
Světlo jako elektromagnetické záření
 Světlo jako elektromagnetické záření Základní pojmy: Homogenní prostředí prostředí, jehož dané vlastnosti jsou ve všech místech v prostředí stejné. Izotropní prostředí prostředí, jehož dané vlastnosti
Světlo jako elektromagnetické záření Základní pojmy: Homogenní prostředí prostředí, jehož dané vlastnosti jsou ve všech místech v prostředí stejné. Izotropní prostředí prostředí, jehož dané vlastnosti
Optika pro mikroskopii materiálů I
 Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
Optika pro mikroskopii materiálů I Jan.Machacek@vscht.cz Ústav skla a keramiky VŠCHT Praha +42-0- 22044-4151 Osnova přednášky Základní pojmy optiky Odraz a lom světla Interference, ohyb a rozlišení optických
1 Jasové transformace
 1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
1 Jasové transformace 1.1 Teoretický rozbor 1.1.1 Princip jasové transformace Jasové transformace představují transformační funkce, které mění vždy určitou hodnotu vstupní jasové funkce na výstupní. Transformace
Metoda Live/Dead aneb využití fluorescenční mikroskopie v bioaugmentační praxi. Juraj Grígel Inovativní sanační technologie ve výzkumu a praxi
 Metoda Live/Dead aneb využití fluorescenční mikroskopie v bioaugmentační praxi Juraj Grígel Inovativní sanační technologie ve výzkumu a praxi Co je to vlastně ta fluorescence? Některé látky (fluorofory)
Metoda Live/Dead aneb využití fluorescenční mikroskopie v bioaugmentační praxi Juraj Grígel Inovativní sanační technologie ve výzkumu a praxi Co je to vlastně ta fluorescence? Některé látky (fluorofory)
ZÁKLADNÍ METODY REFLEKTOMETRIE
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
VLNOVÁ OPTIKA. Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník
 VLNOVÁ OPTIKA Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník Vlnová optika Světlo lze chápat také jako elektromagnetické vlnění. Průkopníkem této teorie byl Christian Huyghens. Některé jevy se dají
VLNOVÁ OPTIKA Mgr. Jan Ptáčník - GJVJ - Fyzika - Optika - 3. ročník Vlnová optika Světlo lze chápat také jako elektromagnetické vlnění. Průkopníkem této teorie byl Christian Huyghens. Některé jevy se dají
Moderní metody rozpoznávání a zpracování obrazových informací 15
 Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
Moderní metody rozpoznávání a zpracování obrazových informací 15 Hodnocení transparentních materiálů pomocí vizualizační techniky Vlastimil Hotař, Ondřej Matúšek Katedra sklářských strojů a robotiky Fakulta
M I K R O S K O P I E
 Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Inovace předmětu KBB/MIK SVĚTELNÁ A ELEKTRONOVÁ M I K R O S K O P I E Rozvoj a internacionalizace chemických a biologických studijních programů na Univerzitě Palackého v Olomouci CZ.1.07/2.2.00/28.0066
Potlačování šumu v mikroskopických snímcích pomocí adaptivního non-local means filtru
 Potlačování šumu v mikroskopických snímcích pomocí adaptivního non-local means filtru Jarní škola 2013 Krušné hory, Mariánská 28. května 2013 Motivace Časosběrná fluorescenční mikroskopie detekce částic
Potlačování šumu v mikroskopických snímcích pomocí adaptivního non-local means filtru Jarní škola 2013 Krušné hory, Mariánská 28. května 2013 Motivace Časosběrná fluorescenční mikroskopie detekce částic
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Analýza obrazu II. Jan Macháček Ústav skla a keramiky VŠCHT Praha
 Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Analýza obrazu II Jan Macháček Ústav skla a keramiky VŠCHT Praha +4- - 44-45 Reference další doporučená literatura Microscopical Examination and Interpretation of Portland Cement and Clinker, Donald H.
Název a číslo materiálu VY_32_INOVACE_ICT_FYZIKA_OPTIKA
 Název a číslo materiálu VY_32_INOVACE_ICT_FYZIKA_OPTIKA OPTIKA ZÁKLADNÍ POJMY Optika a její dělení Světlo jako elektromagnetické vlnění Šíření světla Odraz a lom světla Disperze (rozklad) světla OPTIKA
Název a číslo materiálu VY_32_INOVACE_ICT_FYZIKA_OPTIKA OPTIKA ZÁKLADNÍ POJMY Optika a její dělení Světlo jako elektromagnetické vlnění Šíření světla Odraz a lom světla Disperze (rozklad) světla OPTIKA
12 Metody snižování barevného prostoru
 12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
12 Metody snižování barevného prostoru Studijní cíl Tento blok je věnován základním metodám pro snižování barevného rozsahu pro rastrové obrázky. Postupně zde jsou vysvětleny důvody k použití těchto algoritmů
Optické spektroskopie 1 LS 2014/15
 Optické spektroskopie 1 LS 2014/15 Martin Kubala 585634179 mkubala@prfnw.upol.cz 1.Úvod Velikosti objektů v přírodě Dítě ~ 1 m (10 0 m) Prst ~ 2 cm (10-2 m) Vlas ~ 0.1 mm (10-4 m) Buňka ~ 20 m (10-5 m)
Optické spektroskopie 1 LS 2014/15 Martin Kubala 585634179 mkubala@prfnw.upol.cz 1.Úvod Velikosti objektů v přírodě Dítě ~ 1 m (10 0 m) Prst ~ 2 cm (10-2 m) Vlas ~ 0.1 mm (10-4 m) Buňka ~ 20 m (10-5 m)
Diskrétní 2D konvoluce
 ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Charakteristiky optického záření
 Fyzika III - Optika Charakteristiky optického záření / 1 Charakteristiky optického záření 1. Spektrální charakteristika vychází se z rovinné harmonické vlny jako elementu elektromagnetického pole : primární
Fyzika III - Optika Charakteristiky optického záření / 1 Charakteristiky optického záření 1. Spektrální charakteristika vychází se z rovinné harmonické vlny jako elementu elektromagnetického pole : primární
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
Jak se měří rychlost toku krve v cévách?
 Jak se měří rychlost toku krve v cévách? Princip této vyšetřovací metody je založen na Dopplerově jevu, který spočívá ve změně frekvence ultrazvukového vlnění při vzájemném pohybu zdroje a detektoru vlnění.
Jak se měří rychlost toku krve v cévách? Princip této vyšetřovací metody je založen na Dopplerově jevu, který spočívá ve změně frekvence ultrazvukového vlnění při vzájemném pohybu zdroje a detektoru vlnění.
1 3D snímání: Metody a snímače
 1 3D snímání: Metody a snímače Nejprve je potřeba definovat, že se v rámci tohoto předmětu budeme zabývat pouze bezkontaktními metodami zisku hloubkové informace. Metody pro 3D snímání lze dělit v podstatě
1 3D snímání: Metody a snímače Nejprve je potřeba definovat, že se v rámci tohoto předmětu budeme zabývat pouze bezkontaktními metodami zisku hloubkové informace. Metody pro 3D snímání lze dělit v podstatě
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
MĚŘENÍ ABSOLUTNÍ VLHKOSTI VZDUCHU NA ZÁKLADĚ SPEKTRÁLNÍ ANALÝZY Measurement of Absolute Humidity on the Basis of Spectral Analysis
 MĚŘENÍ ABSOLUTNÍ VLHKOSTI VZDUCHU NA ZÁKLADĚ SPEKTRÁLNÍ ANALÝZY Measurement of Absolute Humidity on the Basis of Spectral Analysis Ivana Krestýnová, Josef Zicha Abstrakt: Absolutní vlhkost je hmotnost
MĚŘENÍ ABSOLUTNÍ VLHKOSTI VZDUCHU NA ZÁKLADĚ SPEKTRÁLNÍ ANALÝZY Measurement of Absolute Humidity on the Basis of Spectral Analysis Ivana Krestýnová, Josef Zicha Abstrakt: Absolutní vlhkost je hmotnost
Roman Juránek. Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 30
 Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Společná laboratoř optiky. Skupina nelineární a kvantové optiky. Představení vypisovaných témat. bakalářských prací. prosinec 2011
 Společná laboratoř optiky Skupina nelineární a kvantové optiky Představení vypisovaných témat bakalářských prací prosinec 2011 O naší skupině... Zařazení: UP PřF Společná laboratoř optiky skupina nelin.
Společná laboratoř optiky Skupina nelineární a kvantové optiky Představení vypisovaných témat bakalářských prací prosinec 2011 O naší skupině... Zařazení: UP PřF Společná laboratoř optiky skupina nelin.
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ
 ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
ROZDĚLENÍ SNÍMAČŮ, POŽADAVKY KLADENÉ NA SNÍMAČE, VLASTNOSTI SNÍMAČŮ (1.1, 1.2 a 1.3) Ing. Pavel VYLEGALA 2014 Rozdělení snímačů Snímače se dají rozdělit podle mnoha hledisek. Základním rozdělení: Snímače
Princip rastrovacího konfokálního mikroskopu
 Konfokální mikroskop Obsah: Konfokální mikroskop... 1 Princip rastrovacího konfokálního mikroskopu... 1 Rozlišovací schopnost... 2 Pozorování povrchů ve skutečných barvách... 2 Konfokální mikroskop Olympus
Konfokální mikroskop Obsah: Konfokální mikroskop... 1 Princip rastrovacího konfokálního mikroskopu... 1 Rozlišovací schopnost... 2 Pozorování povrchů ve skutečných barvách... 2 Konfokální mikroskop Olympus
OBRAZOVÁ ANALÝZA. Speciální technika a měření v oděvní výrobě
 OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
OBRAZOVÁ ANALÝZA Speciální technika a měření v oděvní výrobě Prostředky pro snímání obrazu Speciální technika a měření v oděvní výrobě 2 Princip zpracování obrazu matice polovodičových součástek, buňky
Luminiscence. emise světla látkou, která je způsobená: světlem (fotoluminiscence) fluorescence, fosforescence. chemicky (chemiluminiscence)
 fluorescence, fosforescence. chemicky (chemiluminiscence)") Luminiscence Luminiscence emise světla látkou, která je způsobená: světlem (fotoluminiscence) fluorescence, fosforescence chemicky (chemiluminiscence) teplem (termoluminiscence) zvukem (sonoluminiscence)
Luminiscence Luminiscence emise světla látkou, která je způsobená: světlem (fotoluminiscence) fluorescence, fosforescence chemicky (chemiluminiscence) teplem (termoluminiscence) zvukem (sonoluminiscence)
3D KAMERY A TECHNOLOGIE
 3D KAMERY A TECHNOLOGIE strojové vidění nás baví Zdeněk Šebestík, ATEsystem s.r.o., 2016 KDO JSME Vznik v roce 2013, spol. s r.o. 5 majitelů, pouze vlastní kapitál Dnes 18 zaměstnanců, 3 ext. spolupracovníci
3D KAMERY A TECHNOLOGIE strojové vidění nás baví Zdeněk Šebestík, ATEsystem s.r.o., 2016 KDO JSME Vznik v roce 2013, spol. s r.o. 5 majitelů, pouze vlastní kapitál Dnes 18 zaměstnanců, 3 ext. spolupracovníci
ODRAZ A LOM SVĚTLA. Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika
 ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
ODRAZ A LOM SVĚTLA Mgr. Jan Ptáčník - GJVJ - Septima - Fyzika - Optika Odraz světla Vychází z Huygensova principu Zákon odrazu: Úhel odrazu vlnění je roven úhlu dopadu. Obvykle provádíme konstrukci pomocí
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Metody využívající rentgenové záření. Rentgenografie, RTG prášková difrakce
 Metody využívající rentgenové záření Rentgenografie, RTG prášková difrakce 1 Rentgenovo záření 2 Rentgenovo záření X-Ray Elektromagnetické záření Ionizující záření 10 nm 1 pm Využívá se v lékařství a krystalografii.
Metody využívající rentgenové záření Rentgenografie, RTG prášková difrakce 1 Rentgenovo záření 2 Rentgenovo záření X-Ray Elektromagnetické záření Ionizující záření 10 nm 1 pm Využívá se v lékařství a krystalografii.
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Fyzika II. Marek Procházka Vlnová optika II
 Fyzika II Marek Procházka Vlnová optika II Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení složek vlnění s různou
Fyzika II Marek Procházka Vlnová optika II Základní pojmy Reflexe (odraz) Refrakce (lom) jevy na rozhraní dvou prostředí o různém indexu lomu. Disperze (rozklad) prostorové oddělení složek vlnění s různou
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Pokročilé operace s obrazem
 Získávání a analýza obrazové informace Pokročilé operace s obrazem Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 (BFÚ LF MU) Získávání
Získávání a analýza obrazové informace Pokročilé operace s obrazem Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 (BFÚ LF MU) Získávání
Elektronová mikroskopie SEM, TEM, AFM
 Elektronová mikroskopie SEM, TEM, AFM Historie 1931 E. Ruska a M. Knoll sestrojili první elektronový prozařovací mikroskop 1939 první vyrobený elektronový mikroskop firma Siemens rozlišení 10 nm 1965 první
Elektronová mikroskopie SEM, TEM, AFM Historie 1931 E. Ruska a M. Knoll sestrojili první elektronový prozařovací mikroskop 1939 první vyrobený elektronový mikroskop firma Siemens rozlišení 10 nm 1965 první
MATEMATIKA V MEDICÍNĚ
 MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
Vybrané spektroskopické metody
 Vybrané spektroskopické metody a jejich porovnání s Ramanovou spektroskopií Předmět: Kapitoly o nanostrukturách (2012/2013) Autor: Bc. Michal Martinek Školitel: Ing. Ivan Gregora, CSc. Obsah přednášky
Vybrané spektroskopické metody a jejich porovnání s Ramanovou spektroskopií Předmět: Kapitoly o nanostrukturách (2012/2013) Autor: Bc. Michal Martinek Školitel: Ing. Ivan Gregora, CSc. Obsah přednášky
Frekvenční analýza optických zobrazovacích systémů
 OPT/OZI L05 Frekvenční analýza optických zobrazovacích systémů obecný model vstupní pupila výstupní pupila v z u y z o x z i difrakčně limitovaný zobrazovací systém: rozbíhavá sférická vlna od bodového
OPT/OZI L05 Frekvenční analýza optických zobrazovacích systémů obecný model vstupní pupila výstupní pupila v z u y z o x z i difrakčně limitovaný zobrazovací systém: rozbíhavá sférická vlna od bodového
Geometrická optika. předmětu. Obrazový prostor prostor za optickou soustavou (většinou vpravo), v němž může ležet obraz - - - 1 -
, v němž může ležet obraz - - - 1 -") Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Geometrická optika Optika je část fyziky, která zkoumá podstatu světla a zákonitosti světelných jevů, které vznikají při šíření světla a při vzájemném působení světla a látky. Světlo je elektromagnetické
Interpolace trojrozměrných dat magnetické rezonance
 Rok / Year: Svazek / Volume: Číslo / Number: 2010 12 2 Interpolace trojrozměrných dat magnetické rezonance Interpolation of magnetic resonance threedimensional data Jan Mikulka mikulka@feec.vutbr.cz Ústav
Rok / Year: Svazek / Volume: Číslo / Number: 2010 12 2 Interpolace trojrozměrných dat magnetické rezonance Interpolation of magnetic resonance threedimensional data Jan Mikulka mikulka@feec.vutbr.cz Ústav
Metody využívající rentgenové záření. Rentgenovo záření. Vznik rentgenova záření. Metody využívající RTG záření
 Metody využívající rentgenové záření Rentgenovo záření Rentgenografie, RTG prášková difrakce 1 2 Rentgenovo záření Vznik rentgenova záření X-Ray Elektromagnetické záření Ionizující záření 10 nm 1 pm Využívá
Metody využívající rentgenové záření Rentgenovo záření Rentgenografie, RTG prášková difrakce 1 2 Rentgenovo záření Vznik rentgenova záření X-Ray Elektromagnetické záření Ionizující záření 10 nm 1 pm Využívá
Optoelektronické senzory. Optron Optický senzor Detektor spektrální koherence Senzory se CCD prvky Foveon systém
 Optoelektronické senzory Optron Optický senzor Detektor spektrální koherence Senzory se CCD prvky Foveon systém Optron obsahuje generátor světla (LED) a detektor optické prostředí změna prostředí změna
Optoelektronické senzory Optron Optický senzor Detektor spektrální koherence Senzory se CCD prvky Foveon systém Optron obsahuje generátor světla (LED) a detektor optické prostředí změna prostředí změna
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Úvod do laserové techniky KFE FJFI ČVUT Praha Michal Němec, 2014. Plynové lasery. Plynové lasery většinou pracují v kontinuálním režimu.
 Aktivní prostředí v plynné fázi. Plynové lasery Inverze populace hladin je vytvářena mezi energetickými hladinami některé ze složek plynu - atomy, ionty nebo molekuly atomární, iontové, molekulární lasery.
Aktivní prostředí v plynné fázi. Plynové lasery Inverze populace hladin je vytvářena mezi energetickými hladinami některé ze složek plynu - atomy, ionty nebo molekuly atomární, iontové, molekulární lasery.
Základní pojmy a vztahy: Vlnová délka (λ): vzdálenost dvou nejbližších bodů vlnění kmitajících ve stejné fázi
: vzdálenost dvou nejbližších bodů vlnění kmitajících ve stejné fázi") LRR/BUBCV CVIČENÍ Z BUNĚČNÉ BIOLOGIE 1. SVĚTELNÁ MIKROSKOPIE A PREPARÁTY V MIKROSKOPII TEORETICKÝ ÚVOD: Mikroskopie je základní metoda, která nám umožňuje pozorovat velmi malé biologické objekty. Díky
LRR/BUBCV CVIČENÍ Z BUNĚČNÉ BIOLOGIE 1. SVĚTELNÁ MIKROSKOPIE A PREPARÁTY V MIKROSKOPII TEORETICKÝ ÚVOD: Mikroskopie je základní metoda, která nám umožňuje pozorovat velmi malé biologické objekty. Díky
ZÁKLADNÍ ČÁSTI SPEKTRÁLNÍCH PŘÍSTROJŮ
 ZÁKLADNÍ ČÁSTI SPEKTRÁLNÍCH PŘÍSTROJŮ (c) -2008, ACH/IM BLOKOVÉ SCHÉMA: (a) emisní metody (b) absorpční metody (c) luminiscenční metody U (b) monochromátor často umístěn před kyvetou se vzorkem. Části
ZÁKLADNÍ ČÁSTI SPEKTRÁLNÍCH PŘÍSTROJŮ (c) -2008, ACH/IM BLOKOVÉ SCHÉMA: (a) emisní metody (b) absorpční metody (c) luminiscenční metody U (b) monochromátor často umístěn před kyvetou se vzorkem. Části
vzorek1 0.0033390 0.0047277 0.0062653 0.0077811 0.0090141... vzorek 30 0.0056775 0.0058778 0.0066916 0.0076192 0.0087291
 Vzorová úloha 4.16 Postup vícerozměrné kalibrace Postup vícerozměrné kalibrace ukážeme na úloze C4.10 Vícerozměrný kalibrační model kvality bezolovnatého benzinu. Dle následujících kroků na základě naměřených
Vzorová úloha 4.16 Postup vícerozměrné kalibrace Postup vícerozměrné kalibrace ukážeme na úloze C4.10 Vícerozměrný kalibrační model kvality bezolovnatého benzinu. Dle následujících kroků na základě naměřených
Zobrazovací systémy v transmisní radiografii a kvalita obrazu. Kateřina Boušková Nemocnice Na Františku
 Zobrazovací systémy v transmisní radiografii a kvalita obrazu Kateřina Boušková Nemocnice Na Františku Rentgenové záření Elektromagnetické záření o λ= 10-8 10-13 m V lékařství obvykle zdrojem rentgenová
Zobrazovací systémy v transmisní radiografii a kvalita obrazu Kateřina Boušková Nemocnice Na Františku Rentgenové záření Elektromagnetické záření o λ= 10-8 10-13 m V lékařství obvykle zdrojem rentgenová
Ultrazvuková defektoskopie. Vypracoval Jan Janský
 Ultrazvuková defektoskopie Vypracoval Jan Janský Základní principy použití vysokých akustických frekvencí pro zjištění vlastností máteriálu a vad typické zařízení: generátor/přijímač pulsů snímač zobrazovací
Ultrazvuková defektoskopie Vypracoval Jan Janský Základní principy použití vysokých akustických frekvencí pro zjištění vlastností máteriálu a vad typické zařízení: generátor/přijímač pulsů snímač zobrazovací
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Laboratoř RTG tomografice CET
 Výzkumná zpráva Pro projekt NAKI DF12P01OVV020 Komplexní metodika pro výběr a řemeslné opracování náhradního kamene pro opravy kvádrového zdiva historických objektů Laboratoř RTG tomografice CET Vypracovala:
Výzkumná zpráva Pro projekt NAKI DF12P01OVV020 Komplexní metodika pro výběr a řemeslné opracování náhradního kamene pro opravy kvádrového zdiva historických objektů Laboratoř RTG tomografice CET Vypracovala:
Rastrové digitální modely terénu
 Rastrové digitální modely terénu Rastr je tvořen maticí buněk (pixelů), které obsahují určitou informaci. Stejně, jako mohou touto informací být typ vegetace, poloha sídel nebo kvalita ovzduší, může každá
Rastrové digitální modely terénu Rastr je tvořen maticí buněk (pixelů), které obsahují určitou informaci. Stejně, jako mohou touto informací být typ vegetace, poloha sídel nebo kvalita ovzduší, může každá
ZPRACOVÁNÍ OBRAZU přednáška 3
 ZPRACOVÁNÍ OBRAZU přednáška 3 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ZPRACOVÁNÍ OBRAZU přednáška 3 Vít Lédl vit.ledl@tul.cz TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Makroskopická obrazová analýza pomocí digitální kamery
 Návod pro laboratorní úlohu z měřicí techniky Práce O3 Makroskopická obrazová analýza pomocí digitální kamery 0 1 Úvod: Cílem této laboratorní úlohy je vyzkoušení základních postupů snímání makroskopických
Návod pro laboratorní úlohu z měřicí techniky Práce O3 Makroskopická obrazová analýza pomocí digitální kamery 0 1 Úvod: Cílem této laboratorní úlohy je vyzkoušení základních postupů snímání makroskopických
C Mapy Kikuchiho linií 263. D Bodové difraktogramy 271. E Počítačové simulace pomocí programu JEMS 281. F Literatura pro další studium 289
 OBSAH Předmluva 5 1 Popis mikroskopu 13 1.1 Transmisní elektronový mikroskop 13 1.2 Rastrovací transmisní elektronový mikroskop 14 1.3 Vakuový systém 15 1.3.1 Rotační vývěvy 16 1.3.2 Difúzni vývěva 17
OBSAH Předmluva 5 1 Popis mikroskopu 13 1.1 Transmisní elektronový mikroskop 13 1.2 Rastrovací transmisní elektronový mikroskop 14 1.3 Vakuový systém 15 1.3.1 Rotační vývěvy 16 1.3.2 Difúzni vývěva 17
VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ
 VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ Markéta Mazálková Katedra komunikačních a informačních systémů Fakulta vojenských technologií,
VYUŽITÍ MATLABU PRO PODPORU VÝUKY A PŘI ŘEŠENÍ VÝZKUMNÝCH ÚKOLŮ NA KATEDŘE KOMUNIKAČNÍCH A INFORMAČNÍCH SYSTÉMŮ Markéta Mazálková Katedra komunikačních a informačních systémů Fakulta vojenských technologií,
Termovizní měření. 1 Teoretický úvod. Cíl cvičení: Detekce lidské kůže na snímcích z termovizní i klasické kamery
 Termovizní měření Cíl cvičení: Detekce lidské kůže na snímcích z termovizní i klasické kamery 1 Teoretický úvod Termovizní měření Termovizní kamera je přístroj pro bezkontaktní měření teplotních polí na
Termovizní měření Cíl cvičení: Detekce lidské kůže na snímcích z termovizní i klasické kamery 1 Teoretický úvod Termovizní měření Termovizní kamera je přístroj pro bezkontaktní měření teplotních polí na
Zpracování digitalizovaného obrazu (ZDO) - Segmentace
 - Segmentace") Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
základní vlastnosti, používané struktury návrhové prostředky MATLAB problém kvantování koeficientů
 A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
Šum a jeho potlačení. Michal Švanda. Astronomický ústav MFF UK Astronomický ústav AV ČR. Spektroskopie (nejen) ve sluneční fyzice LS 2011/2012
 ve sluneční fyzice LS 2011/2012") Šum a jeho potlačení Spektroskopie (nejen) ve sluneční fyzice LS 2011/2012 Michal Švanda Astronomický ústav MFF UK Astronomický ústav AV ČR Šum Náhodná veličina Aditivivní měření=signál+šum Obvykle nekorelovaný
Šum a jeho potlačení Spektroskopie (nejen) ve sluneční fyzice LS 2011/2012 Michal Švanda Astronomický ústav MFF UK Astronomický ústav AV ČR Šum Náhodná veličina Aditivivní měření=signál+šum Obvykle nekorelovaný
13. Spektroskopie základní pojmy
 základní pojmy Spektroskopicky významné OPTICKÉ JEVY absorpce absorpční spektrometrie emise emisní spektrometrie rozptyl rozptylové metody Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti
základní pojmy Spektroskopicky významné OPTICKÉ JEVY absorpce absorpční spektrometrie emise emisní spektrometrie rozptyl rozptylové metody Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
(Umělé) osvětlování pro analýzu obrazu
 osvětlování pro analýzu obrazu") (Umělé) osvětlování pro analýzu obrazu Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky 166 36 Praha
(Umělé) osvětlování pro analýzu obrazu Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky 166 36 Praha
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Úvod do spektrálních metod pro analýzu léčiv
 Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Úvod do spektrálních metod pro analýzu léčiv Pavel Matějka, Vadym Prokopec pavel.matejka@vscht.cz pavel.matejka@gmail.com Vadym.Prokopec@vscht.cz
Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti Úvod do spektrálních metod pro analýzu léčiv Pavel Matějka, Vadym Prokopec pavel.matejka@vscht.cz pavel.matejka@gmail.com Vadym.Prokopec@vscht.cz
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Obsah. Funkce grafu Zdrojová data pro graf Typ grafu Formátování prvků grafu Doporučení pro tvorbu grafů Zdroje
 Grafy v MS Excel Obsah Funkce grafu Zdrojová data pro graf Typ grafu Formátování prvků grafu Doporučení pro tvorbu grafů Zdroje Funkce grafu Je nejčastěji vizualizací při zpracování dat z různých statistik
Grafy v MS Excel Obsah Funkce grafu Zdrojová data pro graf Typ grafu Formátování prvků grafu Doporučení pro tvorbu grafů Zdroje Funkce grafu Je nejčastěji vizualizací při zpracování dat z různých statistik
1 Zpracování a analýza tlakové vlny
 1 Zpracování a analýza tlakové vlny 1.1 Cíl úlohy Prostřednictvím této úlohy se naučíte a zopakujete: analýzu biologických signálů v časové oblasti, analýzu biologických signálů ve frekvenční oblasti,
1 Zpracování a analýza tlakové vlny 1.1 Cíl úlohy Prostřednictvím této úlohy se naučíte a zopakujete: analýzu biologických signálů v časové oblasti, analýzu biologických signálů ve frekvenční oblasti,