Základy regulace. Regulační smyčka
|
|
|
- Blažena Matějková
- před 6 lety
- Počet zobrazení:
Transkript


1 Základy regulace Regulace je proces, který udržuje nějakou fyzikální veličinu na požadované hodnotě, resp. v požadovaných mezích, tj. stabilizuje tuto veličinu. Regulátory se v některých aplikacích nazývají stabilizátory. Prvky zajišťující regulaci vytvářejí svým vzájemným působením uzavřený okruh, tzv. regulační okruh nebo též regulační smyčku. Regulace probíhá v uzavřené smyčce tvořené zpětnou vazbou regulované veličiny. Ruční regulace Regulační smyčka V regulační smyčce je regulovaná veličina snímána a srovnávána v komparátoru s požadovanou hodnotou. Rozdíl požadované hodnoty w a skutečné hodnoty x je regulační diference e = w x, která je regulačním členem transformována na nastavovací veličinu y a ta je výstupní veličinou Y R regulátoru a zároveň vstupní veličinou regulovaného systému ovládaného pouze pomocí nastavovacího členu. Výstupem regulovaného systému je regulovaná veličina x. Ve stabilizovaném stavu regulační smyčky je regulační diference velmi malá nebo nulová. Při poruchách, nebo změnách nastavení požadované hodnoty řídicí veličiny w naroste regulační diference, která je změnou nastavovací veličiny y minimalizována. Regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem

2 Aby nedocházelo ke kmitání v regulační smyčce, musí být zajištěno, aby změna nastavovací veličiny neprobíhala příliš rychle. Zjednodušené schéma regulace obsahuje regulátor a regulovaný systém, nebo při podrobnějším členění komparátor, regulační člen, ovladač, nastavovací člen, regulovaný systém a měřicí zařízení (snímači regulované veličiny. Regulátor se skládá z komparátoru, regulačního členu a ovladače. Regulovaný sytém je vybaven nastavovacím členem a snímačem regulované veličiny. Regulátor přímo řídí regulovaný systém nastavovacím signálem y. Zjednodušené funkční schéma regulace Druhy regulace Regulační členy regulátorů Při ruční regulaci přebírá některé z funkcí regulační smyčky člověk Automatická regulace probíhá bez vlivu člověka s výjimkou zadání hodnoty řídicí veličiny, tj. požadované hodnoty regulované veličiny. Automatická regulace může být nastavena časově konstantní řídicí hodnotou w = konst nebo časově proměnnou funkcí w= f(t). Regulace může být tedy nastavena na konstantní nebo na proměnnou hodnotu. K charakteristikám regulačního členu transformujícího signál regulační diference patří: výstupní odezva na vstupní skokovou funkci, tj. skoková odezva výstupní odezva na vstupní sinusovou funkci, tj sinusová odezva Bodův diagram, který znázorňuje zesílení (poměr amplitud) a fázový posun v závislosti na kmitočtu.


3 Proporcionální člen bez zpoždění (P-člen) P-člen, odezva na skokový signál a schematická značka Výstupní signál s 2 P-členu je proporcionální vstupnímu signálu s 1. Funkční závislost výstupu na vstupu je dána násobením konstantním zesilovacím činitelem. U tachogenerátoru (chápaného jako P-člen) je konstantou úměrnosti (proporcionality) K P poměr výstupního napětí a otáček, přičemž výstupní napětí tachogenerátoru U T je vztaženo k referenčnímu napětí U 0 a otáčky n 1 k referenčním otáčkám n 0. Dále uvedené příklady P-členů jsou většinou snímače a zesilovače. Odezvou P-členu na skokovou funkci je opět skoková funkce bez zpoždění. Schematická značka P-členu proto nese označení připomínající časový průběh skokové funkce. Odezvou P-členu (lineárního členu) na sinusový vstupní signál je rovněž kmitočtově nezávislý sinusový signál. Výstupní signál je zde pro všechny kmitočty ve fázi se vstupním signálem, tj. fázový posun je stále ϕ= 0. Tachogenerátor

4 Bodův diagram P-členu ukazuje poměr výstupní amplitudy ke vstupní amplitudě signálu a fázový úhel ϕ mezi výstupním a vstupním signálem, a to obě veličiny v závislosti na kmitočtu, resp. poměru úhlového kmitočtu ω k referenčnímu úhlového kmitočtu ω 0. F = s 2 / s 1 je hodnota přenosové funkce. Pro lineární člen, tj. P-člen, je F = K P a ϕ= 0. Odezva P-členu na sinusový signál Bodův diagram Proporcionální člen se zpožděním 1. řádu (PT 1 -čien) PT 1 -člen má výstupní odezvu proporcionální s určitým zpožděním vstupního signálu. Charakteristikami jsou konstanta úměrnosti K P (zesilovací činitel) a konstanta časového zpoždění T. Odezvou s 2 na skokovou vstupní funkci s 1 je exponenciální funkce odpovídající přechodnému jevu při nabíjení kondenzátoru v obvodu stejnosměrného napětí, tedy s 2 = K P [1 exp( t /T)]. Exponenciální funkce exp( t/t) má po čase t= 3T zanedbatelnou hodnotu e -3 = 0.05 a výstupní funkce má pak hodnotu K P -krát větší, než byla vstupní hodnota. Příkladem PT1-členů jsou prvky absorbující část energie vstupního signálu, např. členy s nezanedbatelnou vstupní kapacitou, např. s kondenzátorem RC-dolní propusti nebo členy absorbující jiný typ energie. Příkladem může být stejnosměrný motor s určitou setrvačnou hmotností rotoru, který má při změnách napětí na rotoru zpožděnou reakci, spočívající ve změnách otáček

5 PT 1 člen, odezva na skokový signál a schematická značka Průběh změny otáček při skokové změně budicího napětí rotoru dynama PT 1 -člen vyhlazuje signály vysokého kmitočtu. PT 1 -člen je proto také označován jako dolní pásmová propust 1. řádu, protože propouští nízké kmitočty a potlačuje vysoké kmitočty. Při vysokých kmitočtech je ω/ω 0 > 1, tj. ω = 2πf > ω 0 = 2πf 0, při nízkých kmitočtech je ω/ω 0 < 1, tj. ω = 2πf < ω 0 = 2πf 0. Při úhlovém kmitočtu ω 0 = 2πf 0 = 1/T jsou zjištěny referenční charakteristické hodnoty PT 1 - členu. Protože PT 1 -člen zpožďuje časově vstupní signál, dochází k fázovému posunu výstupního signálu oproti signálu vstupnímu. Úhel fázového posunu se mění od ϕ = 0 při úhlovém kmitočtu ω = 0 až k ϕ = 90 při úhlovém kmitočtu ω. Při ω = 2πf 00 = ω 0 je úhel fázového posunu ϕ = 45 Chování PT 1 členu při sinusovém vstupním napětí
 PT 2 -člen se skládá ze dvou za sebou zapojených PT 1 -členů.")
 na funkci tvaru S,")
6 Bodův diagram PT 1 členu Proporcionální člen se zpožděním 2. řádu (PT 2 - člen) PT 2 -člen se skládá ze dvou za sebou zapojených PT 1 -členů. Signál zpožděný prvním PT 1 -členem je znovu zpožděn druhým PT 1 -členem absorbujícím (a pak uvolňujícím) energii. Exponenciální odezvu prvního stupně na skokovou funkci transformuje druhý stupeň (druhý PT 1 -člen) na funkci tvaru S, připomínající funkci y= sin (x-π/2)+1. Průběh signálu má v počátku vodorovnou směrnici. PT 2 člen
7 Kmitavý člen Kmitavý člen (zakmitávající tvarovací obvod) obsahuje rovněž dva akumulátory energie, které se střídavě nabíjejí a vybíjejí. Protože se však přitom část energie mění v teplo, má odezva členu na skokovou funkci tvar průběhu tlumených kmitů. Kmitavý člen je charakterizován vlastním rezonančním kmitočtem f 0, resp. odpovídajícím vlastním úhlovým kmitočtem (jmenovitým úhlovým kmitočtem) 2πf 0 a činitelem tlumení D (Damping). Při D = 0 (bez tlumení) následují po prvním překmitu kmity kolem střední hodnoty amplitudy signálu. Pro D = 1 jsou kmity tlumené a pro D > 1 má kmitavý člen vlastnost PT 2 -členu. Příkladem kmitavého členu jsou setrvačné pružinové tlumiče. Při tlumení je energie střídavě akumulována v napnuté pružině a v pohybující se hmotě. Kmitavý člen Skokové odezvy kmitavého členu Chování kmitavého členu při sinusovém vstupním signálu

8 Integrační člen (I-člen) Bodův diagram kmitavého členu a PT 2 členu Výstupem l-členu je signál odpovídající průběhem integrálu funkce vstupního signálu Tím je myšlena integrace narůstající plochy pod křivkou vstupní funkce. Integrační časová konstanta T I udává přitom čas, za který dosáhne výstupní veličina hodnoty 1 při hodnotě vstupní skokové funkce 1. Převrácená hodnota integrační časové konstanty se nazývá integrační koeficient K I = 1/T I. Operační zesilovač s kondenzátorem ve zpětné vazbě tvoří integrační člen. Výstupní napětí je úměrné integrálu vstupního napětí. Odezvou l-regulátoru (integračního členu) na sinusový signál je rovněž sinusový signál. Při malých kmitočtech signálu, tj. při ω << 1/T I je výstupní signál mnohem větší než vstupní signál (v závislosti na zesílení operačního zesilovače). Při ω >> ω 0 = 1/T I je výstupní signál integračního členu mnohem menší než vstupní signál. Z Bodova diagramu je také vidět, že při ω = ω 0 je výstupní amplituda stejná jako vstupní amplituda. Fázový posun je u l- členu stále -90, což znamená, že je výstupní signál zpožděn za vstupním signálem. Skoková odezva a schematická značka l-členu
. Derivace odpovídá směrnici tečny, nebo též strmosti grafu vstupního signálu, tj. stoupání funkce.")
 = k, kde k je konstanta. D-členy na vstupu operačních zesilovačů mohou sloužit např. k derivování signálu snímače.")
9 Chování l-členu při sinusovém vstupním signálu Bodův diagram l-členu Derivační člen (D-člen) Tvar výstupní funkce (signálu) derivačního členu odpovídá derivaci vstupní funkce (vstupního signálu). Derivace odpovídá směrnici tečny, nebo též strmosti grafu vstupního signálu, tj. stoupání funkce. Odezvou D-členu na skokovou změnu (skokovou funkci) je jehlový impulz. Odezvou D-členu na lineárně rostoucí funkci (signál) je konstantní funkce (signál). Matematicky vyjádřeno y = (k. x) = k, kde k je konstanta. D-členy na vstupu operačních zesilovačů mohou sloužit např. k derivování signálu snímače. Je-li tímto signálem údaj dráhy (polohy) x, je derivací tohoto signálu signál udávající rychlost v X = dx/dt (první derivace dráhy podle času).


10 Odezvou D-členu na sinusový signál je rovněž signál sinusového průběhu. Amplituda výstupního signálu je však závislá na kmitočtu. Z Bodova diagramu je vidět, že pro ω < ω 0 je amplituda výstupního signálu menší než amplituda vstupního signálu. Pro ω = ω 0 = 1/T D je výstupní amplituda stejná jako vstupní amplituda. Fázový posun mezi výstupním a vstupním signálem je stále ϕ = +90, což znamená, že výstupní signál předbíhá vstupní signál. Odezvy D-členu na sinusové signály malých a velkých kmitočtů Zpožďovací člen Bodův diagram D-členu Odezvou zpožďovacího členu na skokovou změnu vstupního signálu je časově zpožděná skoková změna výstupního signálu. Změna (reakce) na výstupu následuje po určitém (mrtvém) čase T Z tj. po určitém zpoždění. Odezvou zpožďovacího členu na sinusový signál je časově, tedy fázově posunutý sinusový signál. Je-li zpoždění rovno periodě signálu, je fázový posun = ϕ = Pro ω 0 = 2πf 0 = 1/T Z je fázový posun ϕ = -360 /2 π = '. Zpožďovací členy jsou používány při zpracování signálů pomocí počítače, kdy jsou vstupní signály přesouvány mezi paměťovými místy v rytmu taktovacího kmitočtu. Perioda taktovacího signálu představuje zpoždění T Z.
. Obsahuji spínací kontakty nebo elektronické spínací obvody řízené pomocí klopných obvodů. Analogové regulátory přestavují stále (plynule) nastavovací člen.")
11 Skoková odezva a schematická značka zpožďovacího členu Bodův diagram zpožďovacího členu Regulátory Spínací (přepínací) regulátory mění nastavovací veličinu přepínáním dvou nebo několika hodnot (stupňů). Obsahuji spínací kontakty nebo elektronické spínací obvody řízené pomocí klopných obvodů. Analogové regulátory přestavují stále (plynule) nastavovací člen. Jejich základním prvkem je většinou operační zesilovač. Číslicové regulátory mění nastavovanou veličinu stupňovitě. Při mnohastupňové regulaci může být regulace jemná a plynulá téměř jako analogová regulace. Číslicové regulátory bývají většinou řízené mikrokontrolérem. Spínací regulátory Dvoustavové regulátory mají dva rozlišitelné stavy nebo též polohy. Používají se např. k regulaci teploty. Bimetalový regulátor spojuje v jedné jednotce snímač, komparátor a spínač. Překročí-li požadovaná teplota požadovanou hodnotu, prohne se bimetalový pásek a odpojí topeni. Klesne-Ii regulovaná teplota pod dolní mezní hodnotu, zapne bimetalový spínač znovu topení. Aby kontakty při malé vzdálenosti nejiskřily, je sepnutí (i odtrh) urychleno trvalým magnetem, který při rozpínání pozdrží rozpojení a kontakty jsou pak odtrženy od sebe při napružení bimetalového pásku, tedy rychleji a do dostatečné vzdálenosti. Vlivem tohoto trvalého magnetu existuje přepínací diference mezi vypínací teplotou a zapínací teplotou Čím větší je přepínací diference, tím více kolísá (kmitá) regulovaná veličina kolem požadované hodnoty. Přepínací diference se také nazývá hystereze regulátoru.

 je lineární závislost regulované veličiny na nastavovací veličině.")
12 Dvoupolohový regulátor Bimetalový regulátor Analogové regulátory Analogové regulátory jsou regulátory, které mohou nastavit nastavovací veličinu na kteroukoliv hodnotu mezi oběma krajními hodnotami spojitého rozsahu. Jsou také označovány jako spojité regulátory. Nejdůležitějšími analogovými regulátory jsou P- regulátor, Pl-regulátor a PID-regulátor. Vlastností P-regulátoru (proporcionálního regulátoru) je lineární závislost regulované veličiny na nastavovací veličině. Schematická značka P-regulátoru se označuje v regulačních obvodech K PR. Regulace teploty dvoustavovým regulátorem
 než napěťový signál odpovídající požadované (řídící)")
 mezi výstupním napětím a vstupním napětím. Poměr R K /R e je konstantou úměrnosti K PR (a také zesílením) P- regulátoru.")
13 P regulátor a PI regulátor Elektronický P-regulátor Jednoduchý elektronický P-regulátor je čtyřpól (dvojbran) pracující jako diferenciální zesilovač regulační diference. Operační zesilovač je v součtovém zapojení a napěťový signál odpovídající skutečné regulované hodnotě je přiváděn v opačné polaritě (- U X ) než napěťový signál odpovídající požadované (řídící) hodnotě (U W ). Výstupní napětí regulátoru je pak úměrné regulační diferenci e, resp. rozdílovému napětí U e. Pomocí odporů je možno přizpůsobit regulátor přiváděným vstupním signálům. Rovnice regulátoru vyjadřuje lineární závislost (proporcionalitu) mezi výstupním napětím a vstupním napětím. Poměr R K /R e je konstantou úměrnosti K PR (a také zesílením) P- regulátoru. P-regulátory pracuji bez zpožděni a s trvalou regulační diferencí (která by mohla být teoreticky odstraněna za nekonečně dlouhou dobu). Elektronický PI-regulátor Pl-regulátor vytváří nastavovací veličinu součtem dvou složek. Jedna složka je tvořena proporcionální odezvou na regulační diferenci (P-složka) a druhá složka (l-složka) je úměrná součinu P-složky a času. Elektronický Pl-regulátor je kombinací P-regulátoru a l-regulátoru. Pl-regulátory se často používají k regulaci otáček, protože díky l-členu úplně odstraňují regulační diferenci.
 a derivace P-složky (D-složky). Při vzniku regulační diference vytváří P-složka okamžitě trvalou složku nastavovacího signálu.")


14 PID regulátory 25 Univerzálnějším regulátorem je PID-regulátor Nastavovací signál je tvořen váženým součtem proporcionální odezvy na regulační diferenci (P-složky), integrálu P-složky (l-složky) a derivace P-složky (D-složky). Při vzniku regulační diference vytváří P-složka okamžitě trvalou složku nastavovacího signálu. l-složka vytváří účinnou složku nastavovacího signálu i při nepatrné regulační diferenci, kterou může odstranit v prakticky dosažitelném čase. D-složka se uplatní jenom při změnách regulační diference a může předvídavým překmitem nastavovacího signálu urychlit vyrovnání náhle vzniklé regulační diference. Elektronické PID-regulátory jsou tvořeny operačními zesilovači. Regulační diference je vytvářena vstupním operačním zesilovačem a další 3 paralelně zapojené operační zesilovače vytvářejí P-složku, l-složku a D-složku. Ve výstupním operačním zesilovači se sčítají uvedené 3 složky a váhy těchto složek je možno nastavit odpory PID regulátor PID regulátor s operačními zesilovači

15 Nevýhodou PID-regulátoru je obtížnost optimálního nastavení, které vyžaduje nastavení 3 parametrů, a to nastavení K PR a časových konstant T n a T v. Pokud bychom chtěli otestovat regulátor pro 10 hodnot každého ze 3 parametrů, museli bychom provést teoreticky 10x10x10 = 1000 testů. Z uvedených důvodů jsou v mnoha případech používány P-regulátory nebo Pl-regulátory, což záleží i na vlastnostech regulovaného objektu. Regulační smyčka (okruh) musí být ve všech důležitých a typických situacích stabilní. Číslicová regulace Úlohou řídicích počítačů v zařízeních je řízení a regulace. V jednotlivých případech se jedná o snímání hodnot veličin, informujících o stavu procesu, např. teploty, dráhy, tlaku nebo otáček, jejich porovnávání s mezními hodnotami vypočtenými z hodnot řídících veličin a výpočty hodnot nastavovacích signálů. Nastavovací hodnoty, např. napětí na motoru, ovlivňují proces a tím opět snímané stavové veličiny. Tím je tvořena uzavřená regulační smyčka mezi regulovaným procesem a regulátorem, který je realizovaný jako počítačový program. Úlohou počítače je tedy počítat regulační diferenci a v souladu s naprogramovanými vlastnostmi regulátoru vypočítávat hodnoty nastavovací veličiny a odpovídající signál předávat aktoru (akčnímu členu) v řízeném či regulovaném procesu. Počítač zpravidla také kontroluje, zda nepřekračuje regulační diference meze bezpečnosti a dohlíží tak na bezpečnost regulovaného procesu. Samooptimalizující nebo též adaptivní regulační systém může být programovou změnou parametrů upravován a přizpůsobován regulovanému procesu tak, aby byla regulace optimální, tj. rychlá a bezpečná (bez nebezpečného kmitání). Digitalizace a vzorkování Analogové veličiny sledované jako parametry regulovaného procesu musí být pro účely číslicového zpracování popisovány čísly s určitou přesností. Podle počtu rozlišitelných stupňů měřeného rozsahu je třeba volit šířku slova při ukládání číselných hodnot s odpovídající přesností do paměti počítače. Numerická rozlišitelnost počítače by měla být výrazně větší, než rozlišitelnost snímače v regulované smyčce, aby byla chyba způsobená zpracováním dat co nejmenší. Číslicový počítač nemůže zpracovávat kontinuálně analogové signály z procesu jako analogový regulátor, ale může snímat nebo též odečítat či vzorkovat periodicky jejich okamžité hodnoty, např. s opakovací periodou 10 ms. Mluvíme pak o časové diskretizaci.
.")
16 Digitalizace a vzorkování analogového signálu z regulovaného procesu Časově a hodnotově kontinuální signály, tj. signály se spojitým průběhem, jsou digitalizovány pomoci ADpřevodníku, spínače a paměťového členu (paměti odečtené hodnoty, tj. vzorku signálu). Snímání (přenos do počítače) digitalizovaných hodnot se uskutečňuje periodicky s periodou T A v krátkých časových okamžicích (časová diskretizace). Časově a hodnotově diskretizovaný signál schodovitého průběhu odpovídá původnímu spojitému signálu tím přesněji, čím větší je vzorkovací kmitočet f A = 1/T A a čím větší počet stupňů má A/D-převodník. Maximální možný vzorkovací kmitočet je dán délkou regulačního programu, který může regulovat i více smyček, a rychlostí počítače. Vzorkovací (snímací) kmitočet regulátoru by měl být s ohledem na přesnost regulace co největší.

17 Snímání vzorků signálů a jejich uchovávání ve vstupních pamětech způsobí zpoždění (vzorkovací zpoždění) za původním signálem odpovídající polovině snímací (vzorkovací) periody. Tento časový posun působí stejně jako fázový posun a ovlivňuje regulační smyčku v souvislosti se sklonem ke kmitání podobně nepříznivě, jako např. zpožďovací člen (který může obrátit fázi zpětné vazby a způsobit oscilace). Fázový posun způsobený ukládáním vzorků do vyrovnávacích (vstupních) pamětí narůstá s rostoucím kmitočtem signálů, tj. s rostoucí rychlostí dějů snímaného a regulovaného procesu. Časová diskretizace způsobuje stálé fázové zpoždění v regulační smyčce a zhoršuje stabilitu regulace. 32 Regulační algoritmus Analogicky s funkcí analogového PID-regulátoru vypočítává při číslicové regulaci PID-algoritmus hodnoty nastavovací funkce. Algoritmus je realizován programem, který vypočítává z hodnot vstupních signálů hodnoty výstupních signálů (nastavovacích funkcí). PID-algoritmy se dělí na nastavovací algoritmy a rychlostní algoritmy. PID nastavovací algoritmus Nastavovací funkce PID-regulátoru y se skládá (sčítá) ze tří aditivních částí, a to z části proporcionální regulační odchylce e (P-část), z části odpovídající časovému integrálu regulační diference (l-část) a části odpovídají první derivaci regulační odchylky podle času (D-část). Při číslicové regulaci se regulační diference nemění spojitě, ale skokově v okamžicích T A, 2 T A, 3 T A. n T A a nabývá hodnot e 1, e 2, e 3, e n. Integraci spojité funkce zde nahradí sčítáni hodnot diskrétní funkce a derivaci nahradí rozdíl sousedních hodnot. V časovém okamžiku nt A je vypočtena hodnota y a nastavovací veličiny y. Při číslicové regulaci je integrování nahrazeno sčítáním a derivování odčítáním. Nastavovací algoritmus PID obsahuje výpočet P-části, l- části a D-části.
 a ty jsou pak sečteny viz obr.")

18 Příklad Vytvořte skokovou odezvu číslicového PIDregulátoru s parametry K P = 0,2, T v = 3 T A a T n = 4 T A jako graf pro prvních 11 odečtů (vzorků) hodnoty skokové funkce. Řešení: Postupně jsou sestaveny jednotlivé části odezvy (P-část černě, I-část červeně, D-část modře) a ty jsou pak sečteny viz obr. Nastavovací PID-algoritmus vypočítává hodnoty nastavovací funkce z diskrétních hodnot regulační diference. Skoková odezva je srovnávací charakteristika regulátoru konstruovaná za předpokladu neměnící se regulační diference, tj. za předpokladu neúčinné regulace, která nezmenšuje regulační diferenci. Skoková odezva číslicového PID regulátoru

 Vytvořte blokové schéma programu.")
19 PID rychlostní algoritmus Zatímco nastavovací algoritmus vypočítává nastavovací hodnoty, vypočítává rychlostní algoritmus jen její přírůstky Δy n = y n y n-1 a tyto přírůstky přičítá k hodnotě nastavovací veličiny y n-1 uložené v paměti. Rovnice rychlostního PID-algoritmu: Rychlostní PID-algoritmus vypočítává přírůstky nastavovací funkce z diskrétních hodnot regulační diference. Příklad Naprogramujte v jazyce C rychlostní algoritmus PID s parametry K P = 0,2, T n = 4 T A, T v = 3 T A, T A = 1s. a) Vytvořte blokové schéma programu. b) Napište odpovídající program v jazyce C. Blokové schéma programu PID-algoritmu Program v jazyce C

 za řídící veličinou.")
20 Regulace P-systémů V regulačních smyčkách, obsahujících regulované systémy charakterizované lineárními zpožděnými přenosy, tj. proporcionální systémy, jsou většinou používány Plregulátory nebo PlD-regulátory. Při rychlých změnách řídicí veličiny (regulaci rychlých dějů) jsou používány Pl-regulátory, což je případ vlečných regulovaných obvodů, kdy je regulovaná veličina ve stálém vleku (se stálou regulační diferencí bez nebezpečí překmitu) za řídící veličinou. PID-regulátor je pro děje s prudkými změnami řídící veličiny nevhodný pro jeho překmit při prudké změně způsobený jeho derivačním členem (částí), který zde není výhodou, ale v tomto případě jen možnou příčinou nelinearity. PID-regulátor je efektivní při regulaci pevné hodnoty, při které je regulační diference vyvolávaná rušivými vlivy, tj. např. při regulaci pevně nastavené teploty. Regulace P-systémů Regulace otáček pomocí Pl-regulátoru U obráběcích strojů by měly skutečné otáčky n sk hlavního pohonu i pohonů vřeten (posuvů) co nejpřesněji sledovat požadované hodnoty n pož zadávané numerickým řídicím (NC) systémem. Regulační smyčka se skládá z elektronického Pl-regulátoru, zesilovače pro řízení pohonu (motoru), motoru s časovou konstantou T m a tachogenerátoru. Zesilovač pohonu i tachogenerátor pracují téměř bez zpoždění, tzn., že se chovají jako P-členy (lineární členy). Motor může být v regulační smyčce přibližně reprezentován PT 1 -členem. Při požadavku změny otáček o Δn pož je generován regulátorem nastavovací signál ΔU yp ~ K PR * (n pož n sk ) a přenesen zesilovačem pohonu na motor. V souladu s tím, jak se nová hodnota n sk přiblíží požadované hodnotě n pož se zmenší ΔU yp. Integrující část regulátoru (l-část) vytváří složku signálu ΔU yi úměrnou časovému integrálu rozdílu (n pož n sk ). To znamená, že Pl-regulátor odstraní díky své integrační složce úplně regulační diferencí. Blokové a funkční schéma regulace otáček
21 Při Pl-regulaci a PID regulaci je na rozdíl od vlečné P-regulace odstraněna regulační diference. Je-li známa maximální rychlost změn řídící veličiny w, je možno pro mezní kmitočet těchto změn regulátor pomocí parametrů K PR a T n optimálně nastavit. Při optimálním nastavení je rychle odstraňována regulační odchylka a regulátor ještě nekmitá. Velké hodnoty K PR a malé hodnoty T n způsobí silné kmitání. Součin K PR.K s představuje celkové zesílení regulační odchylky (K s je zesílení v zesilovači pohonu) a T m časovou konstantu motoru. Skokové odezvy Pl-regulátoru při různém nastavení parametrů K PR, T n (T m = 100 ms) Regulace I-systémů Regulace polohy pomocí P-regulátoru Při regulaci systémů obsahujících integrující prvky (l-členy) jsou ve vlečných regulačních smyčkách většinou používány P-regulátory U obráběcích strojů může být poloha suportu nebo pohyblivého stolu snímána pomocí analogového snímače a regulována pomocí operačního zesilovače. Zadávání požadované polohy je rovněž analogové přes ADpřevodník do počítače nebo ručně potenciometrem - viz obr. Vznikne-li regulační diference (např. mechanickým odporem obrábění) Δx = x pož X sk, je zesílena a ovlivní otáčky motoru ve smyslu zmenšení regulační diference Δx. Rychlost posuvu v je úměrná (proporcionální) polohové diferenci Δx. Je tím větší, čím větší je konstanta úměrnosti K PR regulátoru, zesílení výkonového zesilovače, otáčky n 0 motoru při jmenovitém napětí a čím větší je stoupání vodicího šroubu vřetene s Sp. Všechna tato dílčí zesílení se násobí a jsou zahrnuta v zesílení rychlosti K v. Zesílení rychlosti je poměr rychlosti posuvu v k diferenci polohy Δx, tj. K v = v/ Δx.



22 Při zahrnutí dílčích zesílení do jediného parametru K v je možno regulaci polohy suportu obráběcího stroje znázornit zjednodušeně pomocí funkčního schématu se třemi členy. První člen je proporcionální člen se zesílením rychlosti K v. Druhý člen reprezentuje dynamické vlastnosti (setrvačnost) pohonu suportu. Je-li k pohonu použit servomotor s časovou konstantou T A, je možno jej považovat za zpožďovací člen 1. řádu. Třetím členem je integrující člen reprezentující dráhu jako časový integrál rychlosti suportu, odvozené z rychlosti otáčení vodicího šroubu, který prochází vodicí matkou spojenou pevně se suportem nebo posuvným stolem stroje. Uspořádání jednotek analogové regulace polohy suportu (stolu) obráběcího stroje Funkční schéma analogové regulace polohy suportu (stolu) obráběcího stroje

23 Příklad: Požadovaná hodnota, tj. řídící hodnota polohy w, je měněna od počáteční polohy x 1 = 2 mm do koncové polohy x 2 = 12 mm stálou rychlostí po dobu 1 s. Jaká je diference polohy Δx během pohybu suportu, je-li zesílení rychlosti K v = 10 s -1? Řešení: Δx = V/K v = (x-x 1 )/Δt/K v = 10mms -1 /10s -1 = 1 mm Suport se tedy pohybuje se skluzem 1 mm za hodnotou řídící veličiny w. Tento skluz je způsoben odporem (brzdným) při pohybu suportu. Čím je větší zesílení rychlosti K v, tím menší je při zadané rychlosti posuvu v diference polohy Δx. Rychlostní zesílení K v však nelze libovolně zvyšovat, protože by mohl suport při dané rychlosti v a malé regulační diferenci překmitnout vlivem setrvačnosti přes koncovou polohu a pak kmitat. Při použití pohonu s rychlou reakcí, tj. s malou setrvačnou časovou konstantou T A, tj. s malým momentem setrvačnosti a velkým točivým momentem, může být zvoleno velké rychlostní zesílení K v, které je stanoveno v závislosti na časové setrvačné (dynamické) konstantě pohonu T A viz obr. Při K v = 1/4T A nedochází k překmitu suportu přes koncovou polohu při dojezdu. Při požadavku co nejrychlejšího vystavení při přijatelně malé odchylce polohy a malém překmitu v koncové poloze je jako optimální volena většinou hodnota K v 0,28/T A. Příklad: Překmit v závislosti na rychlostním zesílení Smyčka regulace polohy zahrnuje pohon s časovou dynamickou konstantou T A = 80 ms. a) Jaké rychlostní zesílení K v je třeba nastavit na regulátoru polohy, má-li být vystavování co nejrychlejší při malém překmitu a malé regulační odchylce v koncové (cílové) poloze vystavení? b) Jak velký bude překmit x P při rychlosti suportu v= 120 mm/min? Řešení: a) K v 0,28/T A = 0,8/0,08 = 10 s -1 b) Z obrázku je možno pro K v. T A = 0,8 odečíst hodnotu x P /(v. T A ) = 0,41 x P = 0,41. v. T A = 0, mm/min. 80 ms = 66 μm
 posuvu suportu.")

24 Měření rychlosti zesílení Závislost překmitu na rychlostním zesílení při daných dynamických vlastnostech a rychlosti posuvu Aby mohlo být rychlostní zesílení optimálně nastaveno, musí být experimentálně ověřeno chování systému. K tomu je třeba oddělit smyčku regulace polohy, např. rozpojením spojky mezi motorem pohonu a vodicím šroubem (vřetenem) posuvu suportu. Pak posuneme ručně suport o malý kousek. Skutečná poloha se potom nekryje s požadovanou polohou, tj. s polohou danou řídící veličinou. Motor se rozběhne určitými otáčkami, aby vyrovnal diferenci polohy. Protože je však motor odpojen od vodícího šroubu, nedojde ke skutečné regulaci polohy. Otáčky motoru odpovídající určité rychlosti posuvu, zůstávají konstantní a lze je dobře změřit. Nastavení regulátoru Dobrá regulace je podmíněna dobrým nastavením regulátoru. Regulátor je většinou nastavován tak, aby při skokové změně řídící veličiny w dosáhla regulovaná veličina x co nejdříve nově nastavené požadované hodnoty x pož a přitom jen málo a krátkodobě tuto požadovanou hodnotu x pož = w překmitla - viz obr. Rychlost je posuzována podle času regulační odezvy t o, za který dosáhne regulovaná veličina poprvé nově nastavené hodnoty. Doba regulace t r je čas, za který se po skokové změně řídicí veličiny zmenší rozkmit oscilací kolem nově nastavené hodnoty w pod předepsané rozpětí ±Δx, většinou ±10% w. Regulátor je nastavován pomocí parametrů K PR (konstanta úměrnosti), T n (časová integrační konstanta) a T v (časová derivační konstanta). Velká hodnota K PR při malé hodnotě T n vede vždy k silnému kmitání (s velkým rozkmitem) nebo k dlouhému (málo tlumenému) kmitání, vede tedy k nestabilitě regulační smyčky. Průběh zakmitávání regulované veličiny při skokové změně řídící veličiny

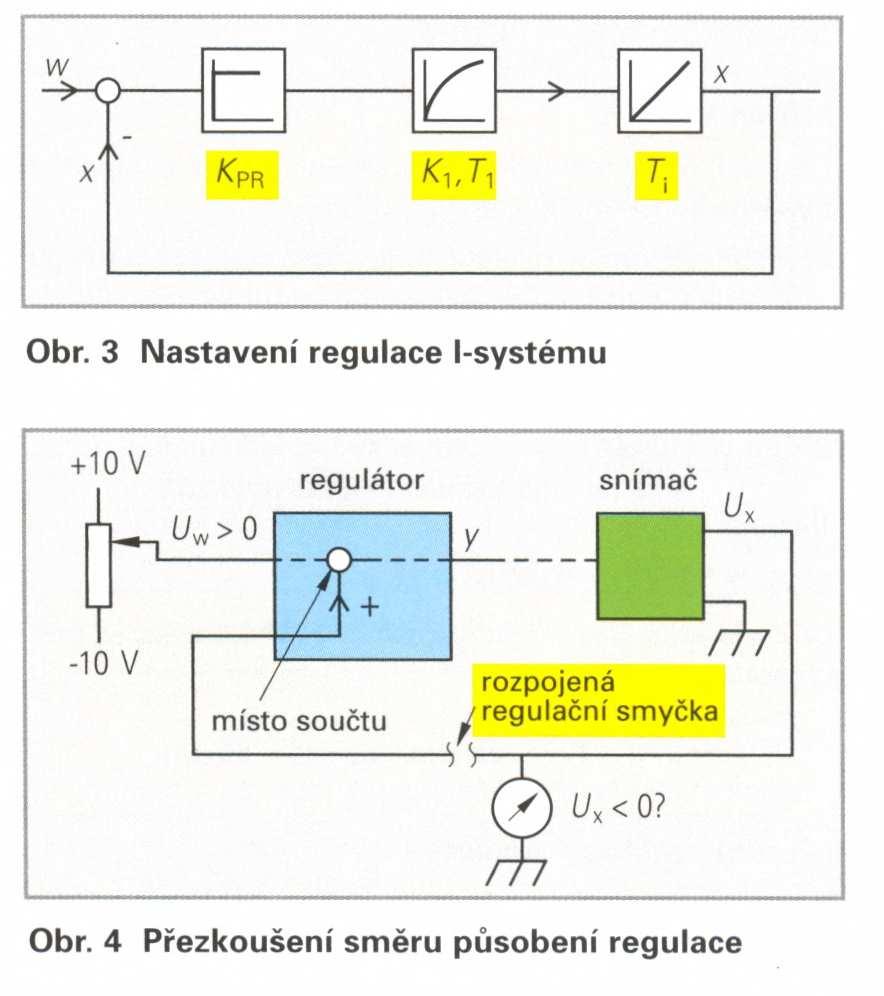
25 Regulační smyčka je většinou optimálně nastavena, nabývá-li regulační plocha nejmenší hodnoty. Samooptimalizující regulátory obsahují mikrokontrolér, který mění parametry a počítá regulační plochu tak dlouho, až najde její minimum. Při výpočtech muže být regulační okruh simulován matematickým modelem regulovaného systému a regulačním algoritmem, jehož parametry jsou měněny. Určení nastavovacích hodnot parametrů regulátoru Regulace systémů s PT 1 -členy a zpožďovacími členy: Podle metody Zieglera a Nicholse je regulátor nejprve nastavován jako P-regulátor viz obr. pomocí parametru K PR do stavu, kdy začne netlumeně kmitat a příslušná hodnota parametru je označena jako K PRkrit. Potom je změřena perioda netlumených oscilací T P. Parametry jsou pak nastaveny na optimální hodnoty dle tabulky. Regulace systémů s l-členem: K regulaci je opět volen P-regulátor viz obr. a součin všech zesílení v regulační smyčce je nastaven na výchozí hodnotu K0 = TP/TI. Potom je měněna hodnota KPR a pomoci ní je nastaveno optimální chování regulační smyčky. Přezkoušení směru působení regulace: Regulační smyčka pracuje správně jen tehdy, je-li v komparátoru na vstupu regulátoru regulovaná veličina x od řídící veličiny w odčítána a ne přičítána. Při nesprávné orientaci musí být snímač přepólován.
26
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Nejjednodušší, tzv. bang-bang regulace
 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Obr. 1 Činnost omezovače amplitudy
 . Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
. Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka
![Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka](/thumbs/91/107653662.jpg "Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka") Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
Binární data. Číslicový systém. Binární data. Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu
 5. Obvody pro číslicové zpracování signálů 1 Číslicový systém počítač v reálném prostředí Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu Binární data
5. Obvody pro číslicové zpracování signálů 1 Číslicový systém počítač v reálném prostředí Klávesnice Snímače polohy, dotykové displeje, myš Digitalizovaná data odvozená z analogového signálu Binární data
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu řídícího systému - analogové systémy v řízení výrobních strojů Autor: Doc. Ing. Josef
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Tvorba grafické vizualizace principu řídícího systému - analogové systémy v řízení výrobních strojů Autor: Doc. Ing. Josef
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady k základním pojmům principu řídicích systémů u výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu
 Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Nespojité (dvou- a třípolohové ) regulátory
 regulátory") Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
13 Měření na sériovém rezonančním obvodu
 13 13.1 Zadání 1) Změřte hodnotu indukčnosti cívky a kapacity kondenzátoru RC můstkem, z naměřených hodnot vypočítej rezonanční kmitočet. 2) Generátorem nastavujte frekvenci v rozsahu od 0,1 * f REZ do
13 13.1 Zadání 1) Změřte hodnotu indukčnosti cívky a kapacity kondenzátoru RC můstkem, z naměřených hodnot vypočítej rezonanční kmitočet. 2) Generátorem nastavujte frekvenci v rozsahu od 0,1 * f REZ do
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech.
 viz např. vstupní test ve skriptech.") Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu
 9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
9. Čidla napětí a proudu Čas ke studiu: 15 minut Cíl Po prostudování tohoto odstavce budete umět popsat princip činnosti základních zapojení čidel napětí a proudu samostatně změřit zadanou úlohu Výklad
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor
 METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka
 Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Operační zesilovač, jeho vlastnosti a využití:
 Truhlář Michal 6.. 5 Laboratorní práce č.4 Úloha č. VII Operační zesilovač, jeho vlastnosti a využití: Úkol: Zapojte operační zesilovač a nastavte jeho zesílení na hodnotu přibližně. Potvrďte platnost
Truhlář Michal 6.. 5 Laboratorní práce č.4 Úloha č. VII Operační zesilovač, jeho vlastnosti a využití: Úkol: Zapojte operační zesilovač a nastavte jeho zesílení na hodnotu přibližně. Potvrďte platnost
Nízkofrekvenční (do 1 MHz) Vysokofrekvenční (stovky MHz až jednotky GHz) Generátory cm vln (až desítky GHz)
 Vysokofrekvenční (stovky MHz až jednotky GHz) Generátory cm vln (až desítky GHz)") Provazník oscilatory.docx Oscilátory Oscilátory dělíme podle několika hledisek (uvedené třídění není zcela jednotné - bylo použito vžitých názvů, které vznikaly v různém období vývoje a za zcela odlišných
Provazník oscilatory.docx Oscilátory Oscilátory dělíme podle několika hledisek (uvedené třídění není zcela jednotné - bylo použito vžitých názvů, které vznikaly v různém období vývoje a za zcela odlišných
Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2)
 + prvky regulačních soustav (1/2)") Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Kvalita regulačního pochodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
filtry FIR zpracování signálů FIR & IIR Tomáš Novák
 filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK
 Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Regulační obvody se spojitými regulátory
 Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Regulace. Dvoustavová regulace
 Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Název: Téma: Autor: Číslo: Prosinec 2013. Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Název: Téma: Autor: Číslo: Inovace a zkvalitnění výuky prostřednictvím ICT Elektrický proud střídavý Elektronický oscilátor
Základy elektrotechniky
 Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Základy elektrotechniky Přednáška Stejnosměrné stroje 1 Konstrukční uspořádání stejnosměrného stroje 1 - hlavní póly 5 - vinutí rotoru 2 - magnetický obvod statoru 6 - drážky rotoru 3 - pomocné póly 7
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
4.1 OSCILÁTORY, IMPULSOVÉ OBVODY
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1 OSCILÁTORY, IMPULSOVÉ OBVODY 4.1.1 OSCILÁTORYY Oscilátory tvoří samostatnou skupinu elektrických obvodů,
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 4.1 OSCILÁTORY, IMPULSOVÉ OBVODY 4.1.1 OSCILÁTORYY Oscilátory tvoří samostatnou skupinu elektrických obvodů,
Ṡystémy a řízení. Helikoptéra Petr Česák
 Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Fyzikální praktikum 3 Operační zesilovač
 Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
Střední odborná škola a Střední odborné učiliště, Dubno Ing. Miroslav Krýdl Tematická oblast ELEKTRONIKA
 Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_03_Filtrace a stabilizace Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
Číslo projektu Číslo materiálu CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_ENI_2.MA_03_Filtrace a stabilizace Název školy Střední odborná škola a Střední odborné učiliště, Dubno Autor Ing. Miroslav Krýdl Tematická
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
31SCS Speciální číslicové systémy Antialiasing
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
Teoretický úvod: [%] (1)
![Teoretický úvod: [%] (1)](/thumbs/26/8023335.jpg "Teoretický úvod: [%] (1)") Vyšší odborná škola a Střední průmyslová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy Číslo úlohy ZESILOVAČ OSCILÁTOR 101-4R Zadání 1. Podle přípravku
Vyšší odborná škola a Střední průmyslová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy Číslo úlohy ZESILOVAČ OSCILÁTOR 101-4R Zadání 1. Podle přípravku
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
VY_32_INOVACE_AUT-2.N-06-DRUHY AUTOMATICKEHO RIZENI. Střední odborná škola a Střední odborné učiliště, Dubno
 Číslo projektu Číslo materiálu Název školy Autor Tematická oblast Ročník CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_AUT-2.N-06-DRUHY AUTOMATICKEHO RIZENI Střední odborná škola a Střední odborné učiliště, Dubno
Číslo projektu Číslo materiálu Název školy Autor Tematická oblast Ročník CZ.1.07/1.5.00/34.0581 VY_32_INOVACE_AUT-2.N-06-DRUHY AUTOMATICKEHO RIZENI Střední odborná škola a Střední odborné učiliště, Dubno
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
II. Nakreslete zapojení a popište funkci a význam součástí následujícího obvodu: Integrátor s OZ
 Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
Datum: 1 v jakém zapojení pracuje tranzistor proč jsou v obvodu a jak se projeví v jeho činnosti kondenzátory zakreslené v obrázku jakou hodnotu má odhadem parametr g m v uvedeném pracovním bodu jakou
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr
 11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
11. Odporový snímač teploty, měřicí systém a bezkontaktní teploměr Otázky k úloze (domácí příprava): Pro jakou teplotu je U = 0 v případě použití převodníku s posunutou nulou dle obr. 1 (senzor Pt 100,
Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace.
 Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace. 10.12.2014 Obsah prezentace Chyby při přechodu kvadrantů vlivem pasivních odporů Kompenzace kvadrantových chyb
Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace. 10.12.2014 Obsah prezentace Chyby při přechodu kvadrantů vlivem pasivních odporů Kompenzace kvadrantových chyb
Šum AD24USB a možnosti střídavé modulace
 Šum AD24USB a možnosti střídavé modulace Vstup USB měřicího modulu AD24USB je tvořen diferenciálním nízkošumovým zesilovačem s bipolárními operačními zesilovači. Charakteristickou vlastností těchto zesilovačů
Šum AD24USB a možnosti střídavé modulace Vstup USB měřicího modulu AD24USB je tvořen diferenciálním nízkošumovým zesilovačem s bipolárními operačními zesilovači. Charakteristickou vlastností těchto zesilovačů
Harmonické oscilátory
 Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Elektrické stroje. Jejich použití v automobilech. Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec
 Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
Elektrické stroje Jejich použití v automobilech Použité podklady: Doc. Ing. Pavel Rydlo, Ph.D., TU Liberec Stejnosměrné motory (konstrukční uspořádání motoru s cizím buzením) Pozor! Počet pólů nemá vliv
OPERA Č NÍ ZESILOVA Č E
 OPERAČNÍ ZESILOVAČE OPERAČNÍ ZESILOVAČE Z NÁZVU SE DÁ USOUDIT, ŽE SE JEDNÁ O ZESILOVAČ POUŽÍVANÝ K NĚJAKÝM OPERACÍM. PŮVODNÍ URČENÍ SE TÝKALO ANALOGOVÝCH POČÍTAČŮ, KDE OPERAČNÍ ZESILOVAČ DOKÁZAL USKUTEČNIT
OPERAČNÍ ZESILOVAČE OPERAČNÍ ZESILOVAČE Z NÁZVU SE DÁ USOUDIT, ŽE SE JEDNÁ O ZESILOVAČ POUŽÍVANÝ K NĚJAKÝM OPERACÍM. PŮVODNÍ URČENÍ SE TÝKALO ANALOGOVÝCH POČÍTAČŮ, KDE OPERAČNÍ ZESILOVAČ DOKÁZAL USKUTEČNIT
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Operační zesilovače. U výst U - U +
 Operační zesilovače Analogové obvody zpracovávají signál spojitě se měnící v čase. Nejpoužívanější součástkou v současné době je operační zesilovač. Název operační pochází z dob, kdy se používal (v elektronkovém
Operační zesilovače Analogové obvody zpracovávají signál spojitě se měnící v čase. Nejpoužívanější součástkou v současné době je operační zesilovač. Název operační pochází z dob, kdy se používal (v elektronkovém
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
VY_32_INOVACE_E 15 03
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
PŘECHODOVÁ CHARAKTERISTIKA
 PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR
 1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
1 JEDNOFÁZOVÝ INDUKČNÍ MOTOR V této kapitole se dozvíte: jak pracují jednofázové indukční motory a jakým způsobem se u různých typů vytváří točivé elektromagnetické pole, jak se vypočítají otáčky jednofázových
Práce s PID regulátorem regulace výšky hladiny v nádrži
 Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Systém vykonávající tlumené kmity lze popsat obyčejnou lineární diferenciální rovnice 2. řadu s nulovou pravou stranou:
 Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
Pracovní úkol: 1. Sestavte obvod podle obr. 1 a změřte pro obvod v periodickém stavu závislost doby kmitu T na velikosti zařazené kapacity. (C = 0,5-10 µf, R = 0 Ω). Výsledky měření zpracujte graficky
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Regulační obvody s nespojitými regulátory
 Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
Mějme obvod podle obrázku. Jaké napětí bude v bodech 1, 2, 3 (proti zemní svorce)? Jaké mezi uzly 1 a 2? Jaké mezi uzly 2 a 3?
? Jaké mezi uzly 1 a 2? Jaké mezi uzly 2 a 3?") TÉMA 1 a 2 V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky V jakých jednotkách se vyjadřuje napětí uveďte název a značku jednotky V jakých jednotkách se vyjadřuje odpor uveďte název
TÉMA 1 a 2 V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky V jakých jednotkách se vyjadřuje napětí uveďte název a značku jednotky V jakých jednotkách se vyjadřuje odpor uveďte název
Měření a automatizace
 Měření a automatizace Číslicové měřící přístroje - princip činnosti - metody převodu napětí na číslo - chyby číslicových měřících přístrojů Základní pojmy v automatizaci - řízení, ovládání, regulace -
Měření a automatizace Číslicové měřící přístroje - princip činnosti - metody převodu napětí na číslo - chyby číslicových měřících přístrojů Základní pojmy v automatizaci - řízení, ovládání, regulace -
Zesilovače. Ing. M. Bešta
 ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
Rezistor je součástka kmitočtově nezávislá, to znamená, že se chová stejně v obvodu AC i DC proudu (platí pro ideální rezistor).
.") Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR. 2.1 Princip
 1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
1 OBSAH 2 STEJNOSMĚRNÝ MOTOR...1 2.1 Princip...1 2.2 Běžný komutátorový stroj buzený magnety...3 2.3 Komutátorový stroj cize buzený...3 2.4 Motor se sériovým buzením...3 2.5 Derivační elektromotor...3
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Testování ochrany při nesymetrickém zatížení generátoru terminálu REM 543
 Testování ochrany při nesymetrickém zatížení generátoru terminálu REM 543 Cíle úlohy: Cílem úlohy je seznámit se s parametrizací terminálu REM543, zejména s funkcí ochrany při nesymetrickém zatížení generátoru.
Testování ochrany při nesymetrickém zatížení generátoru terminálu REM 543 Cíle úlohy: Cílem úlohy je seznámit se s parametrizací terminálu REM543, zejména s funkcí ochrany při nesymetrickém zatížení generátoru.
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Mechatronické systémy s krokovými motory
 Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
Mechatronické systémy s krokovými motory V současné technické praxi v oblasti řídicí, výpočetní a regulační techniky se nejvíce používají krokové a synchronní motorky malých výkonů. Nejvíce máme možnost
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Stejnosměrné generátory dynama. 1. Princip činnosti
 Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Stejnosměrné generátory dynama 1. Princip činnosti stator dynama vytváří budící magnetické pole v tomto poli se otáčí vinutí rotoru s jedním závitem v závitech rotoru se indukuje napětí změnou velikosti
Oscilátory. Návod k přípravku pro laboratorní cvičení v předmětu EO.
 Oscilátory Návod k přípravku pro laboratorní cvičení v předmětu EO. Měření se skládá ze dvou základních úkolů: (a) měření vlastností oscilátoru 1 s Wienovým členem (můstkový oscilátor s operačním zesilovačem)
Oscilátory Návod k přípravku pro laboratorní cvičení v předmětu EO. Měření se skládá ze dvou základních úkolů: (a) měření vlastností oscilátoru 1 s Wienovým členem (můstkový oscilátor s operačním zesilovačem)
ELEKTRONIKA. Maturitní témata 2018/ L/01 POČÍTAČOVÉ A ZABEZPEČOVACÍ SYSTÉMY
 ELEKTRONIKA Maturitní témata 2018/2019 26-41-L/01 POČÍTAČOVÉ A ZABEZPEČOVACÍ SYSTÉMY Řešení lineárních obvodů - vysvětlete postup řešení el.obvodu ohmovou metodou (postupným zjednodušováním) a vyřešte
ELEKTRONIKA Maturitní témata 2018/2019 26-41-L/01 POČÍTAČOVÉ A ZABEZPEČOVACÍ SYSTÉMY Řešení lineárních obvodů - vysvětlete postup řešení el.obvodu ohmovou metodou (postupným zjednodušováním) a vyřešte
princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,
, paralelní provoz synchronních generátorů, kompenzace sítě synchronním generátorem,") 1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1 SYNCHRONNÍ INDUKČNÍ STROJE 1.1 Synchronní generátor V této kapitole se dozvíte: princip činnosti synchronních motorů (generátoru), paralelní provoz synchronních generátorů, kompenzace sítě synchronním
1. Změřte závislost indukčnosti cívky na procházejícím proudu pro tyto případy:
 1 Pracovní úkoly 1. Změřte závislost indukčnosti cívky na procházejícím proudu pro tyto případy: (a) cívka bez jádra (b) cívka s otevřeným jádrem (c) cívka s uzavřeným jádrem 2. Přímou metodou změřte odpor
1 Pracovní úkoly 1. Změřte závislost indukčnosti cívky na procházejícím proudu pro tyto případy: (a) cívka bez jádra (b) cívka s otevřeným jádrem (c) cívka s uzavřeným jádrem 2. Přímou metodou změřte odpor
1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda derivační obvod se zadanou časovou konstantu: τ 2 = 320µs
 1 Zadání 1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda integrační obvod se zadanou časovou konstantu: τ 1 = 62µs derivační obvod se zadanou časovou konstantu: τ 2 = 320µs Možnosti
1 Zadání 1. Navrhněte a prakticky realizujte pomocí odporových a kapacitních dekáda integrační obvod se zadanou časovou konstantu: τ 1 = 62µs derivační obvod se zadanou časovou konstantu: τ 2 = 320µs Možnosti
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
Měření neelektrických veličin. Fakulta strojního inženýrství VUT v Brně Ústav konstruování
 Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Měření neelektrických veličin Fakulta strojního inženýrství VUT v Brně Ústav konstruování Obsah Struktura měřicího řetězce Senzory Technické parametry senzorů Obrazová příloha Měření neelektrických veličin
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem
 upravit následujícím způsobem") Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Operační zesilovač (dále OZ)
") http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
http://www.coptkm.cz/ Operační zesilovač (dále OZ) OZ má složité vnitřní zapojení a byl původně vyvinut pro analogové počítače, kde měl zpracovávat základní matematické operace. V současné době je jeho
1 U Zapište hodnotu časové konstanty derivačního obvodu. Vyznačte měřítko na časové ose v uvedeném grafu.
 v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
DUM 19 téma: Digitální regulátor výklad
 DUM 19 téma: Digitální regulátor výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 19 téma: Digitální regulátor výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Hlavní parametry rádiových přijímačů
 Hlavní parametry rádiových přijímačů Zpracoval: Ing. Jiří Sehnal Pro posouzení základních vlastností rádiových přijímačů jsou zavedena normalizovaná kritéria parametry, podle kterých se rádiové přijímače
Hlavní parametry rádiových přijímačů Zpracoval: Ing. Jiří Sehnal Pro posouzení základních vlastností rádiových přijímačů jsou zavedena normalizovaná kritéria parametry, podle kterých se rádiové přijímače
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry
 18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
18A - PRINCIPY ČÍSLICOVÝCH MĚŘICÍCH PŘÍSTROJŮ Voltmetry, A/D převodníky - principy, vlastnosti, Kmitoměry, čítače, fázoměry, Q- metry Digitální voltmetry Základním obvodem digitálních voltmetrů je A/D
Témata profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika)
") ta profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika) 1. Cívky - vlastnosti a provedení, řešení elektronických stejnosměrných
ta profilové maturitní zkoušky z předmětu Souborná zkouška z odborných elektrotechnických předmětů (elektronická zařízení, elektronika) 1. Cívky - vlastnosti a provedení, řešení elektronických stejnosměrných
LC oscilátory s transformátorovou vazbou
 1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
1 LC oscilátory s transformátorovou vazbou Ing. Ladislav Kopecký, květen 2017 Základní zapojení oscilátoru pro rezonanční řízení motorů obsahuje dva spínače, které spínají střídavě v závislosti na okamžité
Title: IX 6 11:27 (1 of 6)
") PŘEVODNÍKY ANALOGOVÝCH A ČÍSLICOVÝCH SIGNÁLŮ Převodníky umožňující transformaci číslicově vyjádřené informace na analogové napětí a naopak zaujímají v řídícím systému klíčové postavení. Značná část měřených
PŘEVODNÍKY ANALOGOVÝCH A ČÍSLICOVÝCH SIGNÁLŮ Převodníky umožňující transformaci číslicově vyjádřené informace na analogové napětí a naopak zaujímají v řídícím systému klíčové postavení. Značná část měřených