Nejjednodušší, tzv. bang-bang regulace
|
|
|
- Hynek Prokop
- před 9 lety
- Počet zobrazení:
Transkript
1 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo kýženého stavu.

2 Nejjednodušší, tzv. bang-bang regulace Dvoustavový, tzv. bang-bang regulátor je spínač, který sepne, je-li dosaženo nějaké hodnoty. Příkladem je např. bimetalový spínač v žehličce. Výsledkem takové regulace je, že regulovaná veličina (zde teplota) kolísá kolem žádané hodnoty v rozmezí daném hysterzí, nebo zpožděním čidla.
 kolísá kolem")
3 Spojitá regulace přívod vody žádoucí hladina vody čep ventil plovák výtok Záchodové splachovadlo je nejjednodušším příkladem spojitého regulátoru. Proud přitékající vody je omezen, nebo úplně zavřen ventilem ovládaným přes páku plovákem. Když záchod trochu teče, plovák udržuje ventil mírně pootevřený a pouští malý pramínek přitékající vody, který přesně kompenzuje odtok. Hladina se udržuje na konstantní hodnotě a nekolísá.

4 Základní pojmy

5 Stavový popis v regulační technice Lineární soustavy se popisují diferenciálními rovnicemi. V nejobecnější podobě lze soustavu libovolného řádu s m vstupy a r výstupy popsat dvěma soustavami diferenciálních rovnic.

6 Rovnice ve stavovém prostoru

7 Význam matic ve stavovém prostoru

8 Popis soustavy 1. řádu Příklad soustavy 1. řádu, tzv. setrvačného členu. Obvod s cívkou a odporem, po sepnutí narůstá proud exponenciálně s časovou konstantou τ. Obvod lze popsat diferenciální rovnicí 1. řádu a jednou počáteční podmínkou. Řešení je zde možné analyticky. Výsledkem je popis časového průběhu proudu odporem. Lze ukázat, že časová konstanta τ odpovídá okamžiku, kdy veličina dosáhne 0,632 konečné hodnoty po ustálení děje. Toho lze využít při identifikaci soustav.

9 Soustava 2. řádu Příkladem soustavy 2. řádu může být těleso na pružině s tlumením, např. kolo u auta s pérem a tlumičem. Řešením soustavy může být kmitavý děj, nebo i průběh bez překmitu, je-li tlumení velké. Závaží se ustálí, vyrovnají-li se tíhová síla a tah pružiny.

10 Řešení regulačních soustav V regulační technice je tradičně používán popis soustav prostřednictvím operátorového počtu - Laplaceovy transfrormace, která převádí diferenciální rovnice na polynomiální.

11 Laplaceova transformace
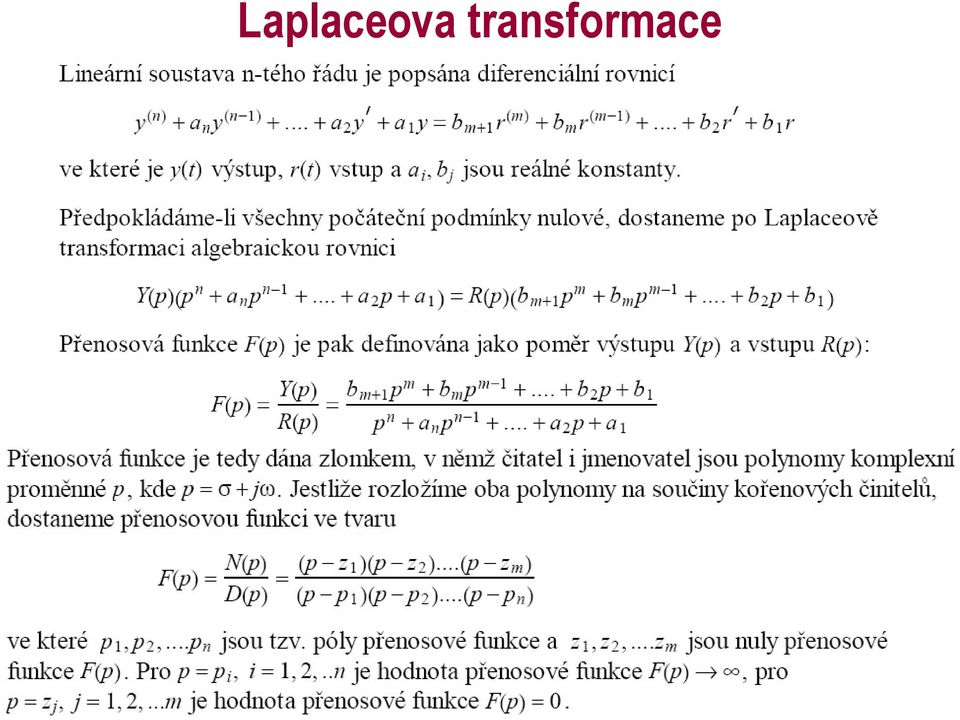
12 Přenosové funkce Přenosová funkce v Laplaceově transformaci v polynomiálním tvaru je nejčastějším způsobem, jak popsat soustavu. Mocnina operátoru p ve jmenovateli určuje řád soustavy. Soustava může obsahovat i tzv. dopravní zpoždění. S dopravním zpožděním se můžeme setkat ve sprše. Otočíme-li kohoutkem teplé vody, trvá nějakou konstantní dobu danou délkou hadice, než pocítíme teplejší vodu tekoucí z růžice. Přechodové charakteristiky soustav 1. až 5. řádu.

13 Identifikace soustav z přechodové charakteristiky Soustavy popisujeme impulzní charakteristikou (časovou odezvou na Diracův impulz), přechodovou charakteristikou (odezvou na jednotkový skok), nebo frekvenční charakteristikou V praxi se nejsnáze měří přechodová charakteristika (zapneme proud, pustíme závaží, zapneme topení, ap.). Ze změřené charakteristiky lze odečíst hlavní časovou konstantu (T n ), dobu prodlevy (T u ), která svědčí na přítomnost dalších, kratších časových konstant, nebo dopravního zpoždění. Z polohy inflexního bodu i lze odhadnout řád soustavy.
, dobu prodlevy (T u ), která svědčí na přítomnost dalších, kratších")
14 Proporcionální regulátor Nejjednodušším spojitým regulátorem je proporcionální P regulátor. Není ničím jiným, než zesilovačem se zesílením Kp. Regulační odchylku zesílí a působí na soustavu regulačním zásahem proporcionálně úměrným této odchylce (viz splachovací nádržka).

15 Integrační regulátor Integrační I regulátor má přechodovou odezvu v podobě lineárně narůstající veličiny integruje konstantu (přechodový skok). V soustavě řízené I regulátorem reaguje regulátor na skok postupně narůstajícím akčním zásahem, jak integruje odchylku. Jak odchylka klesá, narůstá zásah pomaleji. Integruje-li I reg. příliš rychle, dojde k překmitu. I reg. zaručí dlouhodobě nulovou odchylku. I když se objeví chybová veličina, I reg. naintegruje tak velký regulační zásah, že ji vykompenzuje.

16 Proporcionálně integrační regulátor Velmi užitečná kombinace P a I regulátoru je PI regulátor. Spojuje výhody P regulátoru, který reaguje okamžitě a I regulátoru, který zaručí nulovou dlouhodobou odchylku (dokáže naintegrovat velký zásah).

17 PID regulátor Univerzální spojitý regulátor, který poslouží pro většinu soustav. K PI regulátoru je přidána derivační D složka, která reaguje derivační špičkou na přechodový děj. Dokáže urychlit odezvu regulované soustavy. Derivační složka je ale nebezpečná, může snadno způsobit kmitání.

18 Přehled charakteristik regulátorů Impulzní a frekvenční charakteristiky P, I, PD, PI, PID, reálného PD a reálného PID

19 Kritéria pro návrh regulátorů Obvykle chceme, aby soustava co nejrychleji a s nejmenšími odchylkami sledovala průběh požadované hodnoty. Kritérií pro hodnocení kvality regulace (a návrh regulátoru) je celá řada, např. kritérium ITAE, které integruje absolutní hodnotu odchylky a násobí ji váhovou funkcí narůstající lineárně s časem (čím později, tím víc odchylka vadí). Návrh regulátoru je pak optimalizací minimalizující tuto hodnotu.

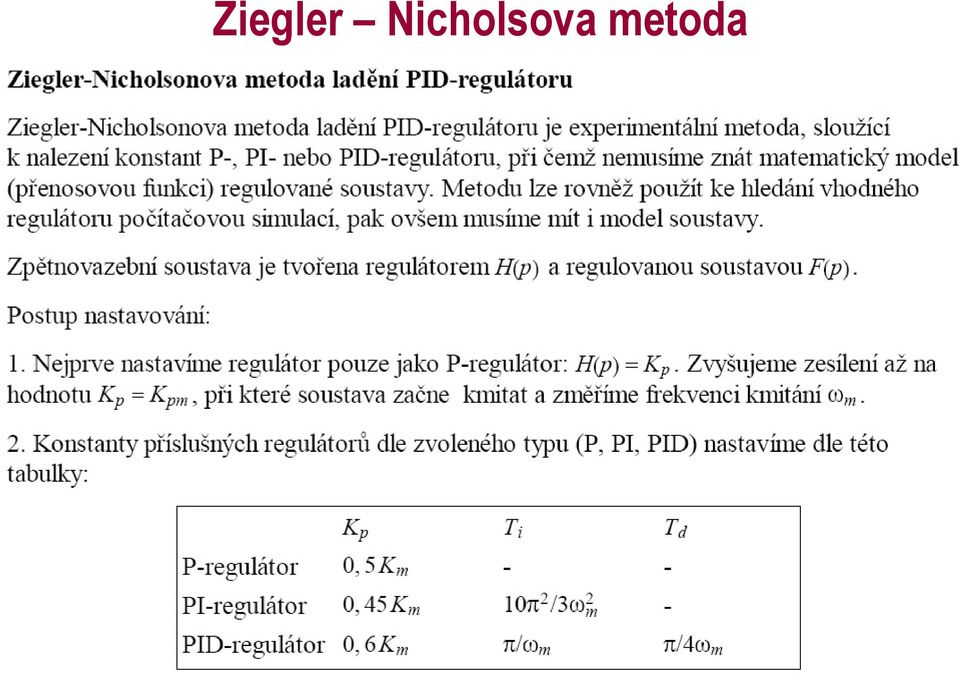
20 Ziegler Nicholsova metoda
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Regulační obvody se spojitými regulátory
 Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
Regulační obvody se spojitými regulátory U spojitého regulátoru výstupní veličina je spojitou funkcí vstupní veličiny. Regulovaná veličina neustále ovlivňuje akční veličinu. Ta může dosahovat libovolné
k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor
 METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
METODICKÝ LIST k DUM 08. pdf ze šablony 1_šablona_automatizační_technika_I 03 tematický okruh sady: regulátor Téma DUM: spojitá regulace test 1 Anotace: Digitální učební materiál DUM - slouží k výuce regulátorů
Projekt realizovaný na SPŠ Nové Město nad Metují. s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje
 Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Projekt realizovaný na SPŠ Nové Město nad Metují s finanční podporou v Operačním programu Vzdělávání pro konkurenceschopnost Královéhradeckého kraje Modul 03 Technické předměty Ing. Otakar Maixner 1 Spojité
Bezpečnost chemických výrob N111001
 Bezpečnost chemických výrob N111001 Petr Zámostný místnost: A-72a tel.: 4222 e-mail: petr.zamostny@vscht.cz Základní pojmy z regulace a řízení procesů Účel regulace Základní pojmy Dynamické modely regulačních
Bezpečnost chemických výrob N111001 Petr Zámostný místnost: A-72a tel.: 4222 e-mail: petr.zamostny@vscht.cz Základní pojmy z regulace a řízení procesů Účel regulace Základní pojmy Dynamické modely regulačních
Robustnost regulátorů PI a PID
 Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Automatické měření veličin
 Měření veličin a řízení procesů Automatické měření veličin» Čidla» termočlánky, tlakové senzory, automatické váhy, konduktometry» mají určitou dynamickou charakteristiku» Analyzátory» periodický odběr
Měření veličin a řízení procesů Automatické měření veličin» Čidla» termočlánky, tlakové senzory, automatické váhy, konduktometry» mají určitou dynamickou charakteristiku» Analyzátory» periodický odběr
Nespojité (dvou- a třípolohové ) regulátory
 regulátory") Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Práce s PID regulátorem regulace výšky hladiny v nádrži
 Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Práce s PID regulátorem regulace výšky hladiny v nádrži Cíl úlohy Zopakování základní teorie regulačního obvodu a PID regulátoru Ukázka praktické aplikace regulačního obvodu na regulaci výšky hladiny v
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2)
 + prvky regulačních soustav (1/2)") Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
Ṡystémy a řízení. Helikoptéra Petr Česák
 Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Regulace. Dvoustavová regulace
 Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
Regulace Dvoustavová regulace Využívá se pro méně náročné aplikace. Z principu není možné dosáhnout nenulové regulační odchylky. Měřená hodnota charakteristickým způsobem kmitá kolem žádané hodnoty. Regulační
PŘECHODOVÁ CHARAKTERISTIKA
 PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
PŘECHODOVÁ CHARAKTERISTIKA Schéma Obr. 1 Schéma úlohy Popis úlohy Dynamická soustava na obrázku obr. 1 je tvořena stejnosměrným motorem M, který je prostřednictvím spojky EC spojen se stejnosměrným generátorem
2. Základní teorie regulace / Regulace ve vytápění
 Regulace v technice prostředí (staveb) (2161087 + 2161109) 2. Základní teorie regulace / Regulace ve vytápění 9. 3. 2016 a 16. 3. 2016 Ing. Jindřich Boháč Regulace v technice prostředí Ing. Jindřich Boháč
Regulace v technice prostředí (staveb) (2161087 + 2161109) 2. Základní teorie regulace / Regulace ve vytápění 9. 3. 2016 a 16. 3. 2016 Ing. Jindřich Boháč Regulace v technice prostředí Ing. Jindřich Boháč
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Obr. 1 Činnost omezovače amplitudy
 . Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
. Omezovače Čas ke studiu: 5 minut Cíl Po prostudování tohoto odstavce budete umět definovat pojmy: jednostranný, oboustranný, symetrický, nesymetrický omezovač popsat činnost omezovače amplitudy a strmosti
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
otopných soustav Co je to regulace? jeden soustavy teplota tlak ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TZ Kabele
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TB21- Regulace otopných soustav T21 2006-2007 Kabele Co je to regulace? ařízen zení,, na jehož impuls se měním jeden nebo více v provozních
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov TB21- Regulace otopných soustav T21 2006-2007 Kabele Co je to regulace? ařízen zení,, na jehož impuls se měním jeden nebo více v provozních
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Kvalita regulačního pochodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) Stabilita
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
HPS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECHODOVÉ CHARAKTERISTIKY
 Schéma PS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECODOVÉ CARAKTERISTIKY A1 K1L U1 K1R A2 PC K2L K2R B1 U2 B2 PjR PjR F C1 S1 h L S2 F C2 h R A/D, D/A PŘEVODNÍK A OVLÁDACÍ JEDNOTKA u R u L Obr. 1 Schéma úlohy
Schéma PS - SEŘÍZENÍ PID REGULÁTORU PODLE PŘECODOVÉ CARAKTERISTIKY A1 K1L U1 K1R A2 PC K2L K2R B1 U2 B2 PjR PjR F C1 S1 h L S2 F C2 h R A/D, D/A PŘEVODNÍK A OVLÁDACÍ JEDNOTKA u R u L Obr. 1 Schéma úlohy
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK
 Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Laboratorní úloha č.8 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH CHARAKTERISTIK a/ PNEUMATICKÉHO PROPORCIONÁLNÍHO VYSÍLAČE b/ PNEUMATICKÉHO P a PI REGULÁTORU c/ PNEUMATICKÉHO a SOLENOIDOVÉHO VENTILU ad a/ Cejchování
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot
 Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ
 NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
NS / PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha č. - Dvoupolohová regulace teploty Vypracoval: Ha Minh.. Spolupracoval: Josef Dovrtěl I. Zadání ) Zapojte laboratorní úlohu dle schématu. ) Zjistěte a zhodnoťte
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Tlumené a vynucené kmity
 Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Regulační obvody s nespojitými regulátory
 Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
Regulační obvody s nespojitými regulátory Dvoupolohový regulátor ve spojení s regulovanou statickou a astatickou soustavou. Známe již funkci regulovaných soustav a nespojitých regulátorů a můžeme přejít
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov EEB1 Vytápění Regulace a měřm ěření doc.ing.karel Kabele,CSc. Co je to regulace? Zařízen zení,, na jehož impuls se měním jeden nebo více
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov EEB1 Vytápění Regulace a měřm ěření doc.ing.karel Kabele,CSc. Co je to regulace? Zařízen zení,, na jehož impuls se měním jeden nebo více
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH
 TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky. NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar
 UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
1. VÝBĚR ZÁKLADNÍCH POJMŮ
 1. VÝBĚR ZÁKLADNÍCH POJMŮ 1.1 Měřicí technika Kalibrace (starší název cejchování) je soubor úkonů, hledající za určených podmínek vztah mezi hodnotami udávanými měřicím přístrojem (nebo měřicí sestavou)
1. VÝBĚR ZÁKLADNÍCH POJMŮ 1.1 Měřicí technika Kalibrace (starší název cejchování) je soubor úkonů, hledající za určených podmínek vztah mezi hodnotami udávanými měřicím přístrojem (nebo měřicí sestavou)
Ivan Švarc. Radomil Matoušek. Miloš Šeda. Miluše Vítečková. c..~"f~ AKADEMICKÉ NAKlADATEL.STVf. Brno 20 I I
 Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Czech Technical University in Prague Faculty of Electrical Engineering. Fakulta elektrotechnická. České vysoké učení technické v Praze
 Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
DUM 02 téma: Spojitá regulace - výklad
 DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
DUM 02 téma: Spojitá regulace - výklad ze sady: 03 Regulátor ze šablony: 01 Automatizační technika I Určeno pro 4. ročník vzdělávací obor: 26-41-M/01 Elektrotechnika ŠVP automatizační technika Vzdělávací
Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy
 VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
VŠB-TU OSTRAVA 2005/2006 Prostředky automatického řízení Úloha č.5 Zapojení PLC do hvězdy Jiří Gürtler SN 7 Zadání:. Seznamte se s laboratorní úlohou využívající PLC k reálnému řízení a aplikaci systému
Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
ZÁKLADY AUTOMATIZACE TECHNOLOGICKÝCH PROCESŮ V TEORII
 VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech.
 viz např. vstupní test ve skriptech.") Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu
 REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu Mechanizace je zavádění mechanizačních prostředků do lidské činnosti, při které tyto prostředky nahrazují člověka jako zdroj energie, ale ne jako zdroj
REGULAČNÍ TECHNIKA základní pojmy, úvod do předmětu Mechanizace je zavádění mechanizačních prostředků do lidské činnosti, při které tyto prostředky nahrazují člověka jako zdroj energie, ale ne jako zdroj
Kompaktní mikroprocesorový regulátor MRS 04
 Kompaktní mikroprocesorový regulátor MRS 04 Dvojitý čtyřmístný displej LED Čtyři vstupy Čtyři výstupy Regulace: on/off, proporcionální, PID, PID třístavová Přístupové heslo Alarmové funkce Přiřazení vstupu
Kompaktní mikroprocesorový regulátor MRS 04 Dvojitý čtyřmístný displej LED Čtyři vstupy Čtyři výstupy Regulace: on/off, proporcionální, PID, PID třístavová Přístupové heslo Alarmové funkce Přiřazení vstupu
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
VLIV VELIKOSTI VZORKOVACÍ PERIODY NA NÁVRH DISKRÉTNÍHO REGULAČNÍHO OBVODU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
Západočeská univerzita. Lineární systémy 2
 Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Prostředky vnější regulace tkacího procesu
 Teorie tkaní Prostředky vnější regulace tkacího procesu M. Bílek 2016 Autoregulační procesy však nejsou schopny vyřešit nestejnoměrnosti rezultující ze systematických variabilit a neshod procesu tkaní.
Teorie tkaní Prostředky vnější regulace tkacího procesu M. Bílek 2016 Autoregulační procesy však nejsou schopny vyřešit nestejnoměrnosti rezultující ze systematických variabilit a neshod procesu tkaní.
Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka
![Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka](/thumbs/91/107653662.jpg "Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka") Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
BASPELIN MRP Popis obsluhy indikační a řídicí jednotky MRP T2
 Baspelin, s.r.o. Hálkova 10 614 00 BRNO tel. + fax: 545 212 382 tel.: 545212614 e-mail: info@baspelin.cz http://www.baspelin.cz BASPELIN MRP Popis obsluhy indikační a řídicí jednotky MRP T2 květen 2004
Baspelin, s.r.o. Hálkova 10 614 00 BRNO tel. + fax: 545 212 382 tel.: 545212614 e-mail: info@baspelin.cz http://www.baspelin.cz BASPELIN MRP Popis obsluhy indikační a řídicí jednotky MRP T2 květen 2004
Úvod do mobilní robotiky AIL028
 Závěrečná přednáška zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 9. ledna 2006 1 2 3 Obsah Obsah zapnutí levého i pravého motoru na plný výkon ještě nutně neznamená pohyb po přímce
Závěrečná přednáška zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 9. ledna 2006 1 2 3 Obsah Obsah zapnutí levého i pravého motoru na plný výkon ještě nutně neznamená pohyb po přímce
2. Regulované soustavy 2.1 Statické a astatické regulované soustavy Soustavy vyšších řádů
 2. Regulované soustavy Největší vliv na průběh regulačního děje mají přenosové vlastnosti regulovaných soustav a ústředních regulačních členů. Při návrhu regulace je třeba znát přenosové vlastnosti regulované
2. Regulované soustavy Největší vliv na průběh regulačního děje mají přenosové vlastnosti regulovaných soustav a ústředních regulačních členů. Při návrhu regulace je třeba znát přenosové vlastnosti regulované
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Mechatronika ve strojírenství
 Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Mechatronika ve strojírenství Zpracoval: Ing. Robert Voženílek, Ph.D. Pracoviště: katedra vozidel a motorů (TUL) Tento materiál vznikl jako součást projektu In-TECH 2, který je spolufinancován Evropským
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Ing. Petr Vlček. Řízení a regulace. SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 Elektrotechnika - Mechatronika. Monitorovací indikátor 06.43.
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Ing. Petr Vlček Řízení a regulace SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 Elektrotechnika - Mechatronika
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Ing. Petr Vlček Řízení a regulace SOUBOR PŘÍPRAV PRO 3. R. OBORU 23-41-M/01 Elektrotechnika - Mechatronika
D C A C. Otázka 1. Kolik z následujících matic je singulární? A. 0 B. 1 C. 2 D. 3
 atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
BASPELIN CPL. Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24
 BASPELIN CPL Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24 červenec 2007 EQ23 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné
BASPELIN CPL Popis obsluhy ekvitermního regulátoru CPL EQ23/EQ24 červenec 2007 EQ23 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov. Regulace. Co je to regulace?
 ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Regulace 242 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné soustavy teplota hmotnostní
ČVUT v Praze Fakulta stavební Katedra technických zařízení budov Regulace 242 Co je to regulace? Zařízení, na jehož impuls se mění jeden nebo více provozních parametrů otopné soustavy teplota hmotnostní
Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D.
 Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D. K A T E D R A Ř Í D I C Í T E C H N I K Y, F E L Č V U T Motivace Regulace v každodenním životě, o které ne tak často přemýšlíme: Sprchování (nastavení
Regulátory I N G. M A R T I N H L I N O V S K Ý, P H D. K A T E D R A Ř Í D I C Í T E C H N I K Y, F E L Č V U T Motivace Regulace v každodenním životě, o které ne tak často přemýšlíme: Sprchování (nastavení
O /OFF a PID REGULACE Co je to O /OFF regulace?
 O /OFF a PID REGULACE Pro jednoduchost se budeme zabývat regulací na konstantní hodnotu žádaná hodnota se v čase nemění. Co je to O /OFF regulace? Je to základní typ regulace zapnuto / vypnuto, též dvoupolohová
O /OFF a PID REGULACE Pro jednoduchost se budeme zabývat regulací na konstantní hodnotu žádaná hodnota se v čase nemění. Co je to O /OFF regulace? Je to základní typ regulace zapnuto / vypnuto, též dvoupolohová
Verifikace modelu VT přehříváků na základě provozních měření
 Verifikace modelu VT přehříváků na základě provozních měření Jan Čejka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Verifikace modelu VT přehříváků na základě provozních měření Jan Čejka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
STOČ 2007. Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA. Úvod
 Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA VŠB-TU OSTRAVA, FEI Miroslav Štefela, kat.455 Úvod Motivace práce Pro řízení procesů s využitím průmyslové sběrnice Profibus-PA
Laboratorní model řízení procesů s využitím průmyslové sběrnice Profibus-PA VŠB-TU OSTRAVA, FEI Miroslav Štefela, kat.455 Úvod Motivace práce Pro řízení procesů s využitím průmyslové sběrnice Profibus-PA
Sauter Components 71211642920 05
 21.164/1 SHK 621...661: Regulátory teploty pro jednotky Fan Coil, elektromechanické Vaše výhoda pro dosažení vyšší energetické účinnosti Umožňuje ovládat vzduchotechnické komponenty na základě potřeby.
21.164/1 SHK 621...661: Regulátory teploty pro jednotky Fan Coil, elektromechanické Vaše výhoda pro dosažení vyšší energetické účinnosti Umožňuje ovládat vzduchotechnické komponenty na základě potřeby.
Studijní opory k předmětu 6AA. 6AA Automatizace. Studijní opory k předmětu. Ing. Petr Pokorný 1/40 6AA AUTOMATIZACE 6AA - cvičení
 6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Základy regulace. Regulační smyčka
 Základy regulace Regulace je proces, který udržuje nějakou fyzikální veličinu na požadované hodnotě, resp. v požadovaných mezích, tj. stabilizuje tuto veličinu. Regulátory se v některých aplikacích nazývají
Základy regulace Regulace je proces, který udržuje nějakou fyzikální veličinu na požadované hodnotě, resp. v požadovaných mezích, tj. stabilizuje tuto veličinu. Regulátory se v některých aplikacích nazývají
Regulační obvod s měřením akční veličiny
 Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Řízení technologických systémů v elektroenergetice
 Řízení technologických systémů v elektroenergetice Ivan Petružela Provoz elektrizačních soustav 1. Řízení technologických systémů 1 Řízení energetické soustavy Vznik elektrizačních soustav Řízení technologických
Řízení technologických systémů v elektroenergetice Ivan Petružela Provoz elektrizačních soustav 1. Řízení technologických systémů 1 Řízení energetické soustavy Vznik elektrizačních soustav Řízení technologických
REGULÁTOR TEPLOTY. typ REGU 2198. www.aterm.cz. REGU2198 Technická dokumentace. REGU2198 Technická dokumentace
 REGULÁTOR TEPLOTY typ REGU 2198 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku byla doložena shoda s příslušnými
REGULÁTOR TEPLOTY typ REGU 2198 1. Úvod Tento výrobek byl zkonstruován podle současného stavu techniky a odpovídá platným evropským a národním normám a směrnicím. U výrobku byla doložena shoda s příslušnými
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je:
, za předpokladu, že je:") Ivan Douša Vodárna2. Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je: 1. povolena odchylka do 5% v ustáleném stavu na skok řídicí veličiny
Ivan Douša Vodárna2. Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je: 1. povolena odchylka do 5% v ustáleném stavu na skok řídicí veličiny
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. )
") ( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
Identifikátor materiálu: VY_32_INOVACE_357
 Identifikátor materiálu: VY_32_INOVACE_357 Anotace Autor Jazyk Očekávaný výstup Výuková prezentace.na jednotlivých snímcích jsou postupně odkrývány informace, které žák zapisuje či zakresluje do sešitu.
Identifikátor materiálu: VY_32_INOVACE_357 Anotace Autor Jazyk Očekávaný výstup Výuková prezentace.na jednotlivých snímcích jsou postupně odkrývány informace, které žák zapisuje či zakresluje do sešitu.
Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc.
 Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Fyzikální praktikum 3 Operační zesilovač
 Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
Ústav fyzikální elekotroniky Přírodovědecká fakulta, Masarykova univerzita, Brno Fyzikální praktikum 3 Úloha 7. Operační zesilovač Úvod Operační zesilovač je elektronický obvod hojně využívaný téměř ve
Prostředky automatického řízení
 Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní Katedra automatizační techniky a řízení Prostředky automatického řízení Měření č. 1 - Dvoupolohová regulace Vypracovali: Pavel Matoška Lukáš
Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní Katedra automatizační techniky a řízení Prostředky automatického řízení Měření č. 1 - Dvoupolohová regulace Vypracovali: Pavel Matoška Lukáš
filtry FIR zpracování signálů FIR & IIR Tomáš Novák
 filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1. Regulace teplovodních otopných soustav úvod, základní pojmy
 Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_20_OC_2.01 Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1 Autor Tématický celek Ing. Zdenka
Číslo projektu Číslo materiálu Název školy CZ.1.07/1.5.00/34.0394 VY_32_INOVACE_20_OC_2.01 Střední odborná škola a Střední odborné učiliště, Hustopeče, Masarykovo nám. 1 Autor Tématický celek Ing. Zdenka
ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
APOSYS 10. Kompaktní mikroprocesorový regulátor APOSYS 10. MAHRLO s.r.o. Ľudmily Podjavorinskej 535/11 916 01 Stará Turá
 APOSYS 10 Kompaktní mikroprocesorový regulátor APOSYS 10 Popis dvojitý čtyřmístný displej LED univerzální vstup s galvanickým oddělením regulační výstupy reléové regulace: on/off, proporcionální, PID,
APOSYS 10 Kompaktní mikroprocesorový regulátor APOSYS 10 Popis dvojitý čtyřmístný displej LED univerzální vstup s galvanickým oddělením regulační výstupy reléové regulace: on/off, proporcionální, PID,
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Laboratorní úloha Seřízení PI regulátoru
 Laboratorní úloha Seřízení PI reglátor 1. Stanovení optimálních parametrů (r 0 (zesílení), I (časová integrační konstanta)) reglátor PI pro reglaci sostavy tří nádrží vyžitím přechodové odezvy reglované
Laboratorní úloha Seřízení PI reglátor 1. Stanovení optimálních parametrů (r 0 (zesílení), I (časová integrační konstanta)) reglátor PI pro reglaci sostavy tří nádrží vyžitím přechodové odezvy reglované
REGULÁTOR TØÍ/ ÈTYØCESTNÝCH VENTILÙ POPIS
 REGULÁTOR TØÍ/ ÈTYØCESTNÝCH VENTILÙ R3V Je určen pro plynulou regulaci pohonu směšovacího ventilu na základě teploty v místnosti, venkovní teploty, teploty za ventilem nebo teploty zpátečky. Podle zvoleného
REGULÁTOR TØÍ/ ÈTYØCESTNÝCH VENTILÙ R3V Je určen pro plynulou regulaci pohonu směšovacího ventilu na základě teploty v místnosti, venkovní teploty, teploty za ventilem nebo teploty zpátečky. Podle zvoleného
Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech
 Proceedings of International Scientific onference of FME Session 4: Automation ontrol and Applied Informatics Paper 7 Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech DAVIDOVÁ, Olga
Proceedings of International Scientific onference of FME Session 4: Automation ontrol and Applied Informatics Paper 7 Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech DAVIDOVÁ, Olga
BASPELIN CPM EQ21. Popis obsluhy ekvitermního regulátoru CPM EQ21
 BASPELIN CPM EQ21 Popis obsluhy ekvitermního regulátoru CPM EQ21 září 2002 EQ21 CPM Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy
BASPELIN CPM EQ21 Popis obsluhy ekvitermního regulátoru CPM EQ21 září 2002 EQ21 CPM Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy