Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
|
|
|
- Barbora Benešová
- před 6 lety
- Počet zobrazení:
Transkript
1 Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction


2 Studijní materiály Khoo: Physiological Control Systems Analýza systémů na fyziologických příkladech usr:pwd biokyb:a6m33mos
3 Systémy Spojité vs diskrétní Deterministické vs stochastické Časově proměnné vs časově invariantní Nezávisí na tom, kolik je hodin Kauzální vs nekauzální Kauzální systém závisí pouze na minulých a současných hodnotách Derivace je přirozeně NEKAUZÁLNÍM výpočtem Tato kauzalita nemá nic společného s tím, že je modelica akauzální Lineární vs nelineární
4 Lineární systémy Lineární systém (soustava) je systém, v němž platí princip superpozice. To znamená, že za předpokladu, že platí: Aditivita (výstupem pro součet dvou signálů bude stejný, jako součet výstupů pro tyto signály jednotlivě) Homogenita (výstup pro násobek jiného vstupu bude roven stejnému násobku výstupu pro tento vstup): Tyto podmínky lze také zapsat jako jedinou:
5 Superpozice řešení průtoku elektrického proudu skládání působení sil na hmotný bod je-li systém lineární a lze využít superpozice, je řešení takového systému často velmi jednoduché a jednoznačné. Chování takových systémů lze předpovědět i do budoucnosti. Nelineární nelze využít (např. dioda)
6 Linearizace Zvolím pracovní oblast (bod)


7 Systémová analýza
8 LTI systémy Matematicky elegantní vztahy mezi vstupy a výstupy Lze určit výstupní odezvu na jakýkoli vstup Lze určit vstup při pozorování výstupu Čili: znám-li reakci na krátký vstup, mohu seskládat libovolný vstup a tím i libovolný výstup Nevytváří nové frekvenční složky, pouze zesiluje či potlačuje
9 Popis LTI systémů Vnější popis systému diferenciální rovnice přenos a poloha pólů a nul přenosu systému přechodová funkce impulsní funkce kmitočtový přenos Vnitřní popis systému (okamžitý stav) Stavový popis (stavové veličiny)

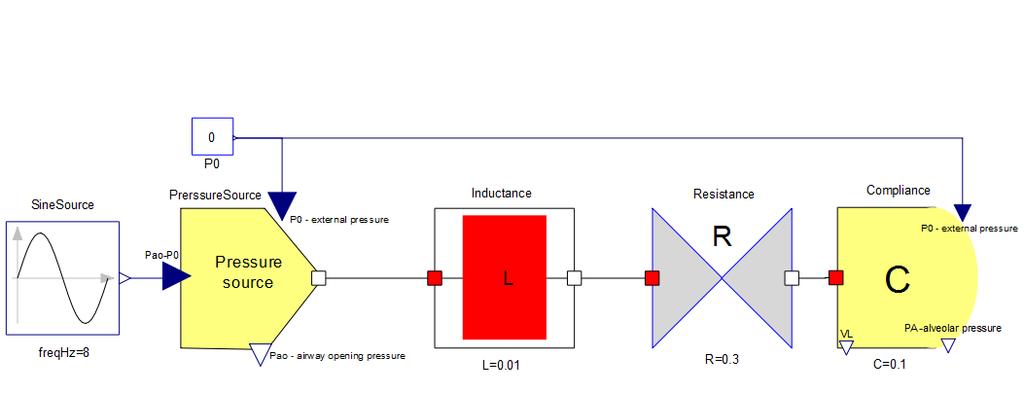
10 Nejjednodušší model mechaniky dýchání Ventilátor - zdroj tlaku Setrvačnost Odpor Vnější atmosferický tlak Pružný vak
11 Nejjednodušší model mechaniky dýchání Ventilátor - zdroj tlaku Setrvačnost L - Inertance Odpor R- Rezistance P A P o Pružný C - Kapacitance vak Vnější atmosferický tlak
12 Nejjednodušší model mechaniky dýchání Ventilátor - zdroj tlaku L Inertance R- Rezistance P A Výstup P o C - Kapacitance Vnější atmosferický tlak řesení
13 Nejjednodušší model mechaniky dýchání řesení?



14 Logaritmické zrcadlo sčítání a odečítání násobení a dělení umocňování /odmocňování Prostor obrazu Prostor originálu řesení
 Prostor obrazu Prostor originálu")
15 Laplaceovo zrcadlo Oblast komplexní proměnné (s) Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu řesení?
16 Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu řesení?
 Prostor obrazu Prostor")
17 Derivování originálu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
18 Derivování originálu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
19 Derivování originálu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
 Prostor obrazu Prostor")
20 Integrování originálu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
21 Linearita obrazu a originálu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
22 Posun originálu (zpoždění) = útlum obrazu Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
23 Posun obrazu = útlum originálu Laplaceovo zrcadlo Oblast komplexní proměnné (s) - úloha v obraze Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu
 Prostor obrazu Prostor")
24 Změna měřítka (podobnost) Laplaceovo zrcadlo - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu

25 Originál: f(t) Příklady Obraz: F(s) Laplaceovo zrcadlo 1 Wolfram Mathematica: atd. Prostor obrazu Prostor originálu
26 Příklady Originál: y(t), x(t) Laplaceovo zrcadlo Obraz: Y(s), X(s) Prostor obrazu Prostor originálu
27 Příklady Originál: y(t), x(t) Laplaceovo zrcadlo Obraz: Y(s), X(s) Prostor obrazu Prostor originálu
, X(s) Prostor obrazu Prostor")
28 Příklady Originál: y(t), x(t) Laplaceovo zrcadlo Obraz: Y(s), X(s) Prostor obrazu Prostor originálu
29 Příklady Originál: y(t), x(t) Laplaceovo zrcadlo Obraz: Y(s), X(s) Při nulových počátečních podmínkách: Prostor obrazu Prostor originálu

30 Originál: f(t) Příklady Obraz: F(s) Laplaceovo zrcadlo Při nulových počátečních podmínkách: Prostor obrazu Prostor originálu
31 Nejjednodušší model mechaniky dýchání - úloha v obraze Oblast komplexní proměnné (s) Úloha v originále: - řešení úlohy v obraze Řešení v originále: Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu řesení?
 Úloha v originále: Řešení úlohy v")
")
32 Laplaceovo zrcadlo Úloha v obraze: Oblast komplexní proměnné (s) Úloha v originále: Řešení úlohy v obraze: Řešení v originále:????????????? Oblast reálné proměnné (oblast času t) Prostor obrazu Prostor originálu

33 Přenos systému: Výstup/Vstup výstup vstup
34 Nejjednodušší model mechaniky dýchání V Modelice (ale i v Simulinku) máme blok TransfeFunction
35

36 Parameters: a: {L*C,R*C,1} b: {1} Stejné výsledky
37 Stejné výsledky
38 Budící vstup - 1 Hz Pao PA
39 Budící vstup - 3 Hz Pao PA
40 Budící vstup - 8 Hz Pao PA
41
42 Přenosová funkce poměr Laplaceova obrazu výstupní veličiny k Laplaceovu obrazu vstupní veličiny při nulových počátečních podmínkách
43 Sestavení přenosové funkce Systém se vstupní u(t) a výstupní y(t) veličinou Laplaceova transformace Výsledný přenos
44 Paralelní kombinace přenosových funkcí Prostý součet přenosů
45 Seriová kombinace přenosových funkcí
46 V záporné zpětné vazbě
47 V kladné zpětné vazbě
48 Přechodová charakteristika Odezva na jednotkový (Haevisideův) skok časový průběh výstupní veličiny systému h(t)
49 Impulsní charakteristika Odezva na jednotkový (Diracův) impuls časový průběh výstupní veličiny systému h(t)
50 Nuly, póly, zesílení Kořeny charakteristické rovnice: Jsou v čitateli nuly (-n1..-nm) Jsou ve jmenovateli póly (-p1, -pn) Zesílení je bm/an Např. Nuly 0, 0, -2, póly 0,0, -5, -6, -2, zesílení 3
51 Nejjednodušší model mechaniky dýchání Otevřená smyčka Ventilátor - zdroj tlaku Uzavřená smyčka Setrvačnost L - Inertance k Odpor R- Rezistance P A P o Pružný C - Kapacitance vak Vnější atmosferický tlak
52 Přechodové odezva systému prvního řádu Nebudeme uvažovat setrvačnost: L=0 Otevřená smyčka Uzavřená smyčka k
53 Přechodové odezva systému prvního řádu na jednotkový impuls Nebudeme uvažovat setrvačnost: L=0 Otevřená smyčka Uzavřená smyčka k 1 Otevřená smyčka Uzavřená smyčka
54 Přechodové odezva systému prvního řádu na jednotkový skok Nebudeme uvažovat setrvačnost: L=0 Otevřená smyčka Uzavřená smyčka k Otevřená smyčka Uzavřená smyčka
55 Přechodové odezva systému druhého řádu Budeme uvažovat setrvačnost: Otevřená smyčka Uzavřená smyčka k
56 Přechodové odezva systému druhého řádu na jednotkový impuls Budeme uvažovat setrvačnost: 1 4 typy chování

57 Přechodové odezva systému druhého řádu na jednotkový impuls Budeme uvažovat setrvačnost: 1 1) Netlumená odezva Když R=0: L=0.01 cmh 2 O s 2 /L C=0.1 L /cm H 2 O Imaginární kořeny 4 typy chování Uzavřená smyčka Otevřená smyčka

58 Přechodové odezva systému druhého řádu na jednotkový impuls Budeme uvažovat setrvačnost: 1 2) Tlumená odezva L=0.01 cmh 2 O s 2 /L C=0.1 L /cm H 2 O R=0.5 cm H 2 O/L Komplexně sdružené kořeny 4 typy chování Otevřená smyčka Uzavřená smyčka

59 Přechodové odezva systému druhého řádu na jednotkový impuls Budeme uvažovat setrvačnost: 1 3) Kriticky tlumená odezva dva stejné reálné kořeny 4 typy chování Otevřená smyčka Uzavřená smyčka
60 Přechodové odezva systému druhého řádu na jednotkový impuls Budeme uvažovat setrvačnost: 1 4) Přetlumená odezva L=0.01 cmh 2 O s 2 /L C=0.1 L /cm H 2 O R=1 cm H 2 O/L dva různé reálné kořeny 4 typy chování Otevřená smyčka Uzavřená smyčka
61 Přechodové odezva systému druhého řádu na jednotkový skok (Podrobnosti viz kniha) L=0.01 cmh 1) Netlumená odezva 2 O s 2 /L C=0.1 L /cm H 2 O 2) Tlumená odezva L=0.01 cmh 2 O s 2 /L C=0.1 L /cm H 2 O R=0.5 cm H 2 O/L 3) Kriticky tlumená odezva 4) Přetlumená odezva L=0.01 cmh 2O s 2 /L C=0.1 L /cm H 2 O R=1 cm H 2 O/L
62 Zobecnění dynamiky systémů druhého řádu
63 Zobecnění dynamiky systémů druhého řádu X(s) X(s) 1) Netlumená (undamped) odezva k Impuls: Skok:
64 Zobecnění dynamiky systémů druhého řádu X(s) X(s) 2) Tlumená (underdamped) odezva k Impuls: Skok: kde:
65 Zobecnění dynamiky systémů druhého řádu X(s) X(s) 3)Kriticky tlumená (underdamped) odezva k Impuls: Skok:
66 Zobecnění dynamiky systémů druhého řádu X(s) X(s) 4)Přetlumená (overdamped) odezva k Impuls: Skok:
67 Impuls: Charakteristika odezvy na impuls
68 Skok: Charakteristika odezvy na skok
69 Zpětné vazby proporcionální, integrační a derivační 1) proporcionální 2) integrační 3) derivační
70
Statická analýza fyziologických systémů
 Statická analýza fyziologických systémů Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control Systems Chapter 3 Static Analysis of Physiological Systems Statická analýzy
Statická analýza fyziologických systémů Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control Systems Chapter 3 Static Analysis of Physiological Systems Statická analýzy
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Tlumené a vynucené kmity
 Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat. 3. SYSTÉMY a jejich popis ve frekvenční oblasti
 Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech.
 viz např. vstupní test ve skriptech.") Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Praktické výpočty s komplexními čísly (především absolutní hodnota a fázový úhel) viz např. vstupní test ve skriptech. Neznalost amplitudové a fázové frekvenční charakteristiky dolní a horní RC-propusti
Laplaceova transformace
 Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Regulační obvod s měřením akční veličiny
 Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Úvod do modelování a simulace. Ing. Michal Dorda, Ph.D.
 Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Nejjednodušší, tzv. bang-bang regulace
 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
CVIČENÍ 4 Doc.Ing.Kateřina Hyniová, CSc. Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze 4.
 CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky. NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar
 UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky NASTAVENÍ PARAMETRŮ PID REGULÁTORU JAKO OPTIMALIZAČNÍ ÚLOHA Ondřej Zouhar Bakalářská práce 2015 1 2 3 Prohlášení Prohlašuji: Tuto práci jsem vypracoval
Modelov an ı syst em u a proces
 Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka
![Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka](/thumbs/91/107653662.jpg "Tel-30 Nabíjení kapacitoru konstantním proudem [V(C1), I(C1)] Start: Transient Tranzientní analýza ukazuje, jaké napětí vytvoří proud 5mA za 4ms na ka") Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
Tel-10 Suma proudů v uzlu (1. Kirchhofův zákon) Posuvným ovladačem ohmické hodnoty rezistoru se mění proud v uzlu, suma platí pro každou hodnotu rezistoru. Tel-20 Suma napětí podél smyčky (2. Kirchhofův
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
ZÁKLADY AUTOMATIZACE TECHNOLOGICKÝCH PROCESŮ V TEORII
 VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
VYSOÁ ŠOLA BÁŇSÁ TECHNICÁ UNIVERZITA OSTRAVA FAULTA STROJNÍ ZÁLADY AUTOMATIZACE TECHNOLOGICÝCH PROCESŮ V TEORII Rozdělení regulovaných soustav Ing. Romana Garzinová, Ph.D. prof. Ing. Zora Jančíková, CSc.
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
PŘÍKLAD PŘECHODNÝ DĚJ DRUHÉHO ŘÁDU ŘEŠENÍ V ČASOVÉ OBLASTI A S VYUŽITÍM OPERÁTOROVÉ ANALÝZY
 PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano
 = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano") Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Autor by chtìl podìkovat všem svým spolupracovníkùm a kolegùm, kteøí mu pomohli s pøípravou textu. K vydání knihy pøispìla firma Newport Electronics s
 Pavel Nevøiva ANALÝZA SIGNÁLÙ A SOUSTAV Praha 2000 Autor by chtìl podìkovat všem svým spolupracovníkùm a kolegùm, kteøí mu pomohli s pøípravou textu. K vydání knihy pøispìla firma Newport Electronics spol.
Pavel Nevøiva ANALÝZA SIGNÁLÙ A SOUSTAV Praha 2000 Autor by chtìl podìkovat všem svým spolupracovníkùm a kolegùm, kteøí mu pomohli s pøípravou textu. K vydání knihy pøispìla firma Newport Electronics spol.
Lineární a adpativní zpracování dat. 3. Lineární filtrace I: Z-transformace, stabilita
 Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Matematicky se přímá Laplaceova transformace definuje jako: Zpětná Laplaceova transformace je definována jako:
 1. OBRAZOVÝ PŘENOS Chování dynamických systémů se běžně popisuje pomocí diferenciálních rovnic. S takovým popisem jste se často setkávali v rámcích jiných předmětů. Když ale chceme analyzovat dynamické
1. OBRAZOVÝ PŘENOS Chování dynamických systémů se běžně popisuje pomocí diferenciálních rovnic. S takovým popisem jste se často setkávali v rámcích jiných předmětů. Když ale chceme analyzovat dynamické
Fourierova transformace
 Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
GUI APLIKACE PRO VÝUKU AUTOMATIZACE
 GUI APLIKACE PRO VÝUKU AUTOMATIZACE J. Škutová VŠB-Technická univerzita Ostrava, Fakulta strojní Abstrakt V rámci projektu ESF byla vytvořena GUI aplikace pro výuku předmětu Základy automatizace. Cílem
GUI APLIKACE PRO VÝUKU AUTOMATIZACE J. Škutová VŠB-Technická univerzita Ostrava, Fakulta strojní Abstrakt V rámci projektu ESF byla vytvořena GUI aplikace pro výuku předmětu Základy automatizace. Cílem
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH
 TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
TEST AUTOMATIZACE A POČÍTAČOVÁ TECHNIKA V PRŮMYSLOVÝCH TECHNOLOGIÍCH 1. Mechanizace je definována jako a) proces vývoje techniky, kde se využívá k realizaci nápravných opatření, která vyplývají z provedených
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Experimentální dynamika (motivace, poslání, cíle)
") Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
Algebra blokových schémat Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů Automatizace - Ing. J. Šípal, PhD 1 Osnova
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
Pro tvorbu samostatně spustitelných aplikací je k dispozici Matlab library.
 1.1 Matlab Matlab je interaktivní systém pro vědecké a technické výpočty založený na maticovém kalkulu. Umožňuje řešit velkou oblast numerických problémů, aniž byste museli programovat vlastní program.
1.1 Matlab Matlab je interaktivní systém pro vědecké a technické výpočty založený na maticovém kalkulu. Umožňuje řešit velkou oblast numerických problémů, aniž byste museli programovat vlastní program.
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Ivan Švarc. Radomil Matoušek. Miloš Šeda. Miluše Vítečková. c..~"f~ AKADEMICKÉ NAKlADATEL.STVf. Brno 20 I I
 Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, Sc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTIE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VIII. SPOJITÉ SYSTÉMY
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, Sc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTIE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VIII. SPOJITÉ SYSTÉMY
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Grafické zobrazení frekvenčních závislostí
 Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I
 Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
1 U Zapište hodnotu časové konstanty derivačního obvodu. Vyznačte měřítko na časové ose v uvedeném grafu.
 v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2)
 + prvky regulačních soustav (1/2)") Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
Předmět: Ročník: Vytvořil: Datum: AUTOMATIZACE DRUHÝ ZDENĚK KOVAL Název zpracovaného celku: 27. 3. 2013 Aut 2- regulační technika (2/3) + prvky regulačních soustav (1/2) 5.5 REGULOVANÉ SOUSTAVY Regulovaná
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Návrh frekvenčního filtru
 Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
Návrh frekvenčního filtru Vypracoval: Martin Dlouhý, Petr Salajka 25. 9 2010 1 1 Zadání 1. Navrhněte co nejjednodušší přenosovou funkci frekvenčního pásmového filtru Dolní propusti typu Bessel, která bude
Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL
 VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
VŠB-TUO 2005/2006 FAKULTA STROJNÍ PROSTŘEDKY AUTOMATICKÉHO ŘÍZENÍ Úloha 5 Řízení teplovzdušného modelu TVM pomocí PC a mikropočítačové jednotky CTRL SN 72 JOSEF DOVRTĚL HA MINH Zadání:. Seznamte se s teplovzdušným
Matematika 5 FSV UK, ZS Miroslav Zelený
 Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Teoretická elektrotechnika - vybrané statě
 Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Biofyzikální ústav LF MU Brno. jarní semestr 2011
 pro obor Ošetřovatelská péče v gerontologii Biofyzikální ústav LF MU Brno jarní semestr 2011 Obsah letmý dotyk teorie systémů klasifikace a analýza biosignálů Co je signál? Co je biosignál? Co si počít
pro obor Ošetřovatelská péče v gerontologii Biofyzikální ústav LF MU Brno jarní semestr 2011 Obsah letmý dotyk teorie systémů klasifikace a analýza biosignálů Co je signál? Co je biosignál? Co si počít
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Vlastnosti konvoluce. ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz
 Systémy Vlastnosti lineárních systémů. Konvoluce diskrétní a spojitý čas. Vlastnosti konvoluce Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Systémy obecně: spojení komponentů, zařízení nebo
Systémy Vlastnosti lineárních systémů. Konvoluce diskrétní a spojitý čas. Vlastnosti konvoluce Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Systémy obecně: spojení komponentů, zařízení nebo
základní vlastnosti, používané struktury návrhové prostředky MATLAB problém kvantování koeficientů
 A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
do magisterské etapy programu ELEKTRONIKA A KOMUNIKACE
 JMÉNO A PŘÍJMENÍ: 1 VZOROVÝ TEST K PŘIJÍMACÍ ZKOUŠCE do magisterské etapy programu ELEKTRONIKA A KOMUNIKACE Odpovědi na otázky pište do volného místa za každou otázkou. Pro pomocné výpočty použijte čistou
JMÉNO A PŘÍJMENÍ: 1 VZOROVÝ TEST K PŘIJÍMACÍ ZKOUŠCE do magisterské etapy programu ELEKTRONIKA A KOMUNIKACE Odpovědi na otázky pište do volného místa za každou otázkou. Pro pomocné výpočty použijte čistou
filtry FIR zpracování signálů FIR & IIR Tomáš Novák
 filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
Číslicová filtrace. FIR filtry IIR filtry. ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
Zesilovače. Ing. M. Bešta
 ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
ZESILOVAČ Zesilovač je elektrický čtyřpól, na jehož vstupní svorky přivádíme signál, který chceme zesílit. Je to tedy elektronické zařízení, které zesiluje elektrický signál. Zesilovač mění amplitudu zesilovaného
Operační zesilovače. U výst U - U +
 Operační zesilovače Analogové obvody zpracovávají signál spojitě se měnící v čase. Nejpoužívanější součástkou v současné době je operační zesilovač. Název operační pochází z dob, kdy se používal (v elektronkovém
Operační zesilovače Analogové obvody zpracovávají signál spojitě se měnící v čase. Nejpoužívanější součástkou v současné době je operační zesilovač. Název operační pochází z dob, kdy se používal (v elektronkovém
Předmět A3B31TES Př. 2 B
 Předmět A3B31TES Př. 2 B PS,TB,OK 1 1 Katedra teorie obvodů Přednáška 2: Systémy PS,TB,OK Předmět A3B31TES Př. 2 B únor 2015 1 / 56 Obsah 1 Úvod 2 Typy systémů 3 Stabilita systémů 4 Příklady systémů 5
Předmět A3B31TES Př. 2 B PS,TB,OK 1 1 Katedra teorie obvodů Přednáška 2: Systémy PS,TB,OK Předmět A3B31TES Př. 2 B únor 2015 1 / 56 Obsah 1 Úvod 2 Typy systémů 3 Stabilita systémů 4 Příklady systémů 5
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb
 Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Kirchhoffovy zákony. Kirchhoffovy zákony
 Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
13. Kvadratické rovnice 2 body
 13. Kvadratické rovnice 2 body 13.1. Rovnice x 2 + 2x + 2 m = 0 (s neznámou x) má dva různé reálné kořeny, které jsou oba menší než tři, právě a) m (1, 17), b) m = 2, c) m = 2 m = 5, d) m 2, 5, e) m >
13. Kvadratické rovnice 2 body 13.1. Rovnice x 2 + 2x + 2 m = 0 (s neznámou x) má dva různé reálné kořeny, které jsou oba menší než tři, právě a) m (1, 17), b) m = 2, c) m = 2 m = 5, d) m 2, 5, e) m >
Pozorovatel, Stavová zpětná vazba
 Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
Pozorovatel, Stavová zpětná vazba Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 6 Reference 8 Úvod Pozorovatel stavu slouží k pozorování (odhadování) zejména neměřitelných stavů systému.
MĚŘENÍ A ANALÝZA ELEKTROAKUSTICKÝCH SOUSTAV NA MODELECH. Petr Kopecký ČVUT, Fakulta elektrotechnická, Katedra Radioelektroniky
 MĚŘENÍ A ANALÝZA ELEKTROAKUSTICKÝCH SOUSTAV NA MODELECH Petr Kopecký ČVUT, Fakulta elektrotechnická, Katedra Radioelektroniky Při návrhu elektroakustických soustav, ale i jiných systémů, je vhodné nejprve
MĚŘENÍ A ANALÝZA ELEKTROAKUSTICKÝCH SOUSTAV NA MODELECH Petr Kopecký ČVUT, Fakulta elektrotechnická, Katedra Radioelektroniky Při návrhu elektroakustických soustav, ale i jiných systémů, je vhodné nejprve