Úvod do mobilní robotiky AIL028
|
|
|
- Šimon Radovan Macháček
- před 8 lety
- Počet zobrazení:
Transkript
1 SLAM - souběžná lokalizace a mapování {md zw} at robotika.cz ledna 2008

2 1 2 3
3 SLAM intro Obsah SLAM = Simultaneous Localization And Mapping problém typu slepice-vejce nutné pro průzkum neznámého prostředí stále atraktivní/aktivní téma v robotice Robit aneb cesta tam a zase zpátky.

4 Vyrovnání polygonu použití v zeměměřictví měření vzdálenosti a azimutu na další bod nelze korigovat, není-li reference uzavření cyklu minimalizace chyb měření

5 Navigační značky Obsah odpovídají vrcholům polygonu měřená vzdálenost a azimut z odometrie problém s jednoznačností vrcholů

6 Skládání laserových skenů inkrementální matching - minimalizace funkce po přidání mapa ztuhne problém s cykly chybí revize historie

7 EM metoda Obsah data d = {o (1), u (1), o (2), u (2),... o (T ), u (T ) }, kde o (t) je observation v čase t a u (t) odometrie mapa m = {m x,y } x,y, kde m x,y popisuje vlastnosti světa na pozici (x, y) model pohybu: P(ξ u, ξ) model vnímání: P(o m, ξ) inverzní model vnímání: P(m o, ξ) (z Bayesova vzorce) P(A B i ) = P(A B i) P(B i ) P(B i A) = P(B i )P(A B i ) k j=1 P(B j)p(a B j )
 inverzní model vnímání: P(m o, ξ) (z Bayesova vzorce) P(A B i ) = P(A B i) P(B i ) P(B i")
8 EM metoda - cíl Obsah nalézt nejpravděpodobnější mapu m = arg max m P(m d) EM ve skutečnosti hledá pouze lokální maximum T T 1 P(m d) = λ... P(o (t) m, ξ (t) ) P(ξ (t+1) u (t), ξ (t) )dξ (1),..., d t=1 t=1
 m, ξ (t) ) P(ξ (t+1) u (t), ξ (t) )dξ (1),.")
9 E step - expectation step počítá pravděpodobnost P(ξ m, d) s dosud nejlepší známou mapou m odpovídá lokalizaci v první iteraci je mapa prázdná

10 M step - maximization step výpočet nejpravděpodobnější mapy = arg max m P(m ξ, d) používá pozici z předešlého kroku implementace simulovaným žíháním (zabránění lokálnímu minimu)

11 Problém?! Obsah

12 Thrun, Burgard, Fox A Real-Time Algorithm for Mobile Robot Mapping With Applications to Multi-Robot and 3D Mapping (ICRA 2000) princip MCL mapa je kolekce laserových skenů s pozicí matching z každého vzorku provádí se zpětné korekce (pozice u skenů)

13 Tom Duckett, Stephen Marsland, Jonathan Shapiro Learning Globally Consistent Maps by Relaxation (ICRA 2000) používá pouze informace o relativní pozici potřebuje kompas mapa je graf, každý vrchol má kartézské souřadnice, každá hrana má délku a absolutní orientaci (díky kompasu)

14 Algoritmus Obsah pro každý vrchol i 1 pro všechny sousedy j vrcholu i spočítej odhad (x ji, y ji ) pozice vrcholu i x ji = x j + d ji cos θ ji y ji = y j + d ji sin θ ji a jeho rozptyl v ji = v j + u ji 2 zkombinuj všechny odhady pozice vrcholu i 1 v i = j 1 v ji x i = j x ji v i v ji y i = j y ji v i v ji

15
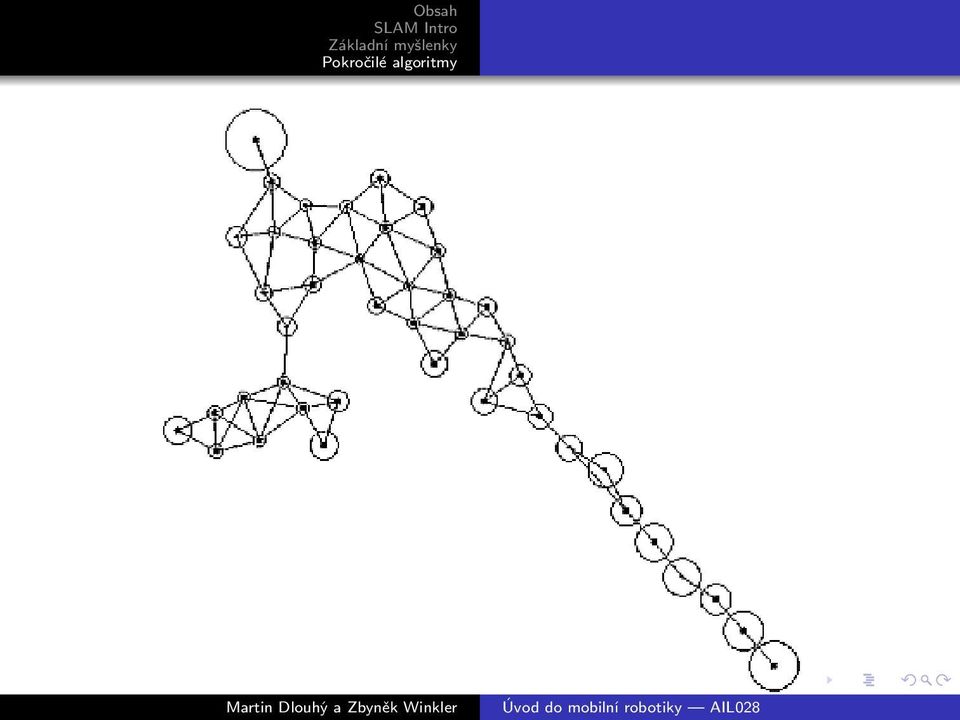
16 Důkaz konvergence každá hrana představuje pružinu pružina je nejméně napnutá, když vzdálenost vrcholů odpovídá její délce globální minimum, když celková energie minimální [ (xi x j + d ij cos θ ij ) 2 + (y i y j + d ij sin θ ij ) 2] E = i j 1 každá aktualizace zmenšuje energii E 2 energie E je zdola omezená 0 3 je kvadratická, takže má pouze jedno minimum
![(xi x j + d ij cos θ ij ) 2 + (y i y j + d ij sin θ ij ) 2] E = i j 1 každá aktualizace](/docs-images/53/10528640/images/page_16.jpg "zmenšuje energii E 2 energie E je zdola omezená 0 3 je kvadratická, takže má pouze jedno")
17 Andrew Howard, Maja J Mataric and Gaurav Sukhatme Relaxation on a Mesh: a Formalism for Generalized Localization (IROS 2001) nepotřebuje kompas zavádí lokální soustavy souřadnic znak pozorovaný ve dvou různých soustavách mezi nimi vytváří hranu nulové délky (taky pružina)

18 Algoritmus Obsah v podstatě stejný jako u Duckett. není dokázáno, že konverguje do globálního minima

19

20 Zbyněk Winkler Obsah Plánování cesty pro mobilní roboty (Diplomová práce, MFF UK, 2002) rozšíření a zobecnění Duckett nepotřebuje kompas u pozorovaných znaků potřebuje navíc i orientaci dokázána konvergence do globálního minima vrcholy mají kromě pozice i orientaci hrany vyjadřují relativní pozici vrcholů vůči sobě

21 Algoritmus Obsah 1 Pro každý vrchol k aktualizujeme souřadnice (x k, y k, θ k ) (souřadnice ostatních vrcholů jsou fixované). Nové souřadnice vrcholu k získáme minimalizací funkce (x j +u jk cos θ j v jk sin θ j x k ) l 2 + f k (x k, y k, θ k ) = (y j + u jk sin θ j +v jk cos θ j y k ) 2 + (x k +u kj cos θ k v kj sin θ k x j ) 2 + j (y k +u kj sin θ k +v kj cos θ k y j ) 2 2 Předchozí krok opakujeme, dokud maximální změna pozice neklesne pod požadovanou hranici nebo dokud není splněno jiné vhodné ukončovací kritérium.
22 Důkaz konvergence Definujeme chybovou funkci vrcholu i jako součet přes všechny sousedy e i = l j [ (xi + u ij cos θ i v ij sin θ i x j ) 2 ] + (y i + u ij sin θ i + v ij cos θ i y j ) 2 (1) Každý člen součtu (1) vyjadřuje rozdíl v přesvědčení vrcholu i na to, kde by se měl soused j nacházet a toho, kde se ve skutečnosti nachází. Chybová funkce celého grafu je potom součet chyb e i všech vrcholů. n E = e i (2) i
23 Grafické znázornění chyby vrcholu
24 Grafické znázornění chyby sousedů
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
Dobývání znalostí. Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze
 Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Bayesovské modely Doc. RNDr. Iveta Mrázová, CSc.
Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Bayesovské modely Doc. RNDr. Iveta Mrázová, CSc.
Cíle lokalizace. Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí
 2. vzhledem k mapě 3. v daném prostředí") Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Úvod do mobilní robotiky AIL028
 Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
oddělení Inteligentní Datové Analýzy (IDA)
") Vytěžování dat Filip Železný Katedra počítačů oddělení Inteligentní Datové Analýzy (IDA) 22. září 2014 Filip Železný (ČVUT) Vytěžování dat 22. září 2014 1 / 25 Odhad rozdělení Úloha: Vstup: data D = {
Vytěžování dat Filip Železný Katedra počítačů oddělení Inteligentní Datové Analýzy (IDA) 22. září 2014 Filip Železný (ČVUT) Vytěžování dat 22. září 2014 1 / 25 Odhad rozdělení Úloha: Vstup: data D = {
VYSOKÁ ŠKOLA EKONOMICKÁ V PRAZE. Optimalizace trasy při revizích elektrospotřebičů
 VYSOKÁ ŠKOLA EKONOMICKÁ V PRAZE FAKULTA INFORMATIKY A STATISTIKY Hlavní specializace: Ekonometrie a operační výzkum Název diplomové práce Optimalizace trasy při revizích elektrospotřebičů Diplomant: Vedoucí
VYSOKÁ ŠKOLA EKONOMICKÁ V PRAZE FAKULTA INFORMATIKY A STATISTIKY Hlavní specializace: Ekonometrie a operační výzkum Název diplomové práce Optimalizace trasy při revizích elektrospotřebičů Diplomant: Vedoucí
Kvadratickou funkcí se nazývá každá funkce, která je daná rovnicí. Definičním oborem kvadratické funkce je množina reálných čísel.
 Kvadratická funkce Kvadratickou funkcí se nazývá každá funkce, která je daná rovnicí y = ax 2 + bx + c Číslo a je různé od nuly, b,c jsou libovolná reálná čísla. Definičním oborem kvadratické funkce je
Kvadratická funkce Kvadratickou funkcí se nazývá každá funkce, která je daná rovnicí y = ax 2 + bx + c Číslo a je různé od nuly, b,c jsou libovolná reálná čísla. Definičním oborem kvadratické funkce je
Základní spádové metody
 Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Komplexní čísla, Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika Komplexní čísla, Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady 4. ročník a oktáva 3 hodiny týdně PC a dataprojektor, učebnice
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika Komplexní čísla, Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady 4. ročník a oktáva 3 hodiny týdně PC a dataprojektor, učebnice
Metamorfóza obrázků Josef Pelikán CGG MFF UK Praha
 Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
Lineární funkcí se nazývá každá funkce, která je daná rovnicí y = ax + b, kde a, b jsou reálná čísla.
 Lineární funkce Lineární funkcí se nazývá každá funkce, která je daná rovnicí y = ax + b, kde a, b jsou reálná čísla. Číslo b je hodnota funkce f v bodě 0. Definičním oborem lineární funkce je množina
Lineární funkce Lineární funkcí se nazývá každá funkce, která je daná rovnicí y = ax + b, kde a, b jsou reálná čísla. Číslo b je hodnota funkce f v bodě 0. Definičním oborem lineární funkce je množina
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady 4. ročník 3 hodiny týdně PC a dataprojektor Kombinatorika Řeší jednoduché úlohy
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika Kombinatorika, pravděpodobnost a statistika, Posloupnosti a řady 4. ročník 3 hodiny týdně PC a dataprojektor Kombinatorika Řeší jednoduché úlohy
Obsah prezentace. Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest
 Obsah prezentace Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest 1 Základní pojmy Vrchol grafu: {množina V} Je to styčná vazba v grafu, nazývá se též uzlem, prvkem
Obsah prezentace Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest 1 Základní pojmy Vrchol grafu: {množina V} Je to styčná vazba v grafu, nazývá se též uzlem, prvkem
Numerické metody a programování. Lekce 7
 Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Zápočtová práce STATISTIKA I
 Zápočtová práce STATISTIKA I Obsah: - úvodní stránka - charakteristika dat (původ dat, důvod zpracování,...) - výpis naměřených hodnot (v tabulce) - zpracování dat (buď bodové nebo intervalové, podle charakteru
Zápočtová práce STATISTIKA I Obsah: - úvodní stránka - charakteristika dat (původ dat, důvod zpracování,...) - výpis naměřených hodnot (v tabulce) - zpracování dat (buď bodové nebo intervalové, podle charakteru
Fakulta chemicko-technologická Katedra analytické chemie. 3.2 Metody s latentními proměnnými a klasifikační metody
 Fakulta chemicko-technologická Katedra analytické chemie 3.2 Metody s latentními proměnnými a klasifikační metody Vypracoval: Ing. Tomáš Nekola Studium: licenční Datum: 21. 1. 2008 Otázka 1. Vypočtěte
Fakulta chemicko-technologická Katedra analytické chemie 3.2 Metody s latentními proměnnými a klasifikační metody Vypracoval: Ing. Tomáš Nekola Studium: licenční Datum: 21. 1. 2008 Otázka 1. Vypočtěte
PROBLÉM ČTYŘ BAREV. Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu?
 ROBLÉM ČTYŘ BAREV Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu? ROBLÉM ČTYŘ BAREV L KH ROBLÉM ČTYŘ BAREV Vytvoříme graf Kraje = vrcholy
ROBLÉM ČTYŘ BAREV Lze obarvit jakoukoliv mapu v rovině čtyřmi barvami tak, aby žádné dvě sousedící oblasti neměly stejnou barvu? ROBLÉM ČTYŘ BAREV L KH ROBLÉM ČTYŘ BAREV Vytvoříme graf Kraje = vrcholy
Maturitní okruhy z matematiky - školní rok 2007/2008
 Maturitní okruhy z matematiky - školní rok 2007/2008 1. Některé základní poznatky z elementární matematiky: Číselné obory, dělitelnost přirozených čísel, prvočísla a čísla složená, největší společný dělitel,
Maturitní okruhy z matematiky - školní rok 2007/2008 1. Některé základní poznatky z elementární matematiky: Číselné obory, dělitelnost přirozených čísel, prvočísla a čísla složená, největší společný dělitel,
Limitní věty teorie pravděpodobnosti. Jiří Neubauer. Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel
 Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Jestliže opakujeme nezávisle nějaký pokus, můžeme z pozorovaných hodnot sestavit rozdělení relativních četností
Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Jestliže opakujeme nezávisle nějaký pokus, můžeme z pozorovaných hodnot sestavit rozdělení relativních četností
Úvod do mobilní robotiky AIL028
 Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Pravděpodobnostní plánování zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 12. prosince 2005 1 Co už umíme a co ne? Jak řešit složitější případy? Definice konfiguračního
Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky
 6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
Metoda Monte Carlo, simulované žíhání
 co byste měli umět po dnešní lekci: integrovat pomocí metody Monte Carlo modelovat jednoduché mnočásticové systémy (Brownův pohyb,...) nalézt globální minimum pomocí simulovaného žíhání Určení čísla metodou
co byste měli umět po dnešní lekci: integrovat pomocí metody Monte Carlo modelovat jednoduché mnočásticové systémy (Brownův pohyb,...) nalézt globální minimum pomocí simulovaného žíhání Určení čísla metodou
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
Pro bodový odhad při základním krigování by soustava rovnic v maticovém tvaru vypadala následovně:
 KRIGING Krigování (kriging) označujeme interpolační metody, které využívají geostacionární metody odhadu. Těchto metod je celá řada, zde jsou některé příklady. Pro krigování se používá tzv. Lokální odhad.
KRIGING Krigování (kriging) označujeme interpolační metody, které využívají geostacionární metody odhadu. Těchto metod je celá řada, zde jsou některé příklady. Pro krigování se používá tzv. Lokální odhad.
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
označme j = (0, 1) a nazvěme tuto dvojici imaginární jednotkou. Potom libovolnou (x, y) = (x, 0) + (0, y) = (x, 0) + (0, 1)(y, 0) = x + jy,
 a nazvěme tuto dvojici imaginární jednotkou. Potom libovolnou (x, y) = (x, 0) + (0, y) = (x, 0) + (0, 1)(y, 0) = x + jy,") Komplexní čísla Množinu všech uspořádaných dvojic (x, y) reálných čísel x, y nazýváme množinou komplexních čísel C, jestliže pro každé dvě takové dvojice (x, y ), (x 2, y 2 ) je definována rovnost, sčítání
Komplexní čísla Množinu všech uspořádaných dvojic (x, y) reálných čísel x, y nazýváme množinou komplexních čísel C, jestliže pro každé dvě takové dvojice (x, y ), (x 2, y 2 ) je definována rovnost, sčítání
0.1 Úvod do matematické analýzy
 Matematika I (KMI/PMATE) 1 0.1 Úvod do matematické analýzy 0.1.1 Pojem funkce Veličina - pojem, který popisuje kvantitativní (číselné) vlastnosti reálných i abstraktních objektů. Příklady veličin: hmotnost
Matematika I (KMI/PMATE) 1 0.1 Úvod do matematické analýzy 0.1.1 Pojem funkce Veličina - pojem, který popisuje kvantitativní (číselné) vlastnosti reálných i abstraktních objektů. Příklady veličin: hmotnost
Circular Harmonics. Tomáš Zámečník
 Circular Harmonics Tomáš Zámečník Úvod Circular Harmonics Reprezentace křivky, která je: podmonožinou RxR uzavřená funkcí úhlu na intervalu Dále budeme hovořit pouze o takovýchto křivkách/funkcích
Circular Harmonics Tomáš Zámečník Úvod Circular Harmonics Reprezentace křivky, která je: podmonožinou RxR uzavřená funkcí úhlu na intervalu Dále budeme hovořit pouze o takovýchto křivkách/funkcích
zejména Dijkstrův algoritmus pro hledání minimální cesty a hladový algoritmus pro hledání minimální kostry.
 Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
Optimalizace & soft omezení: algoritmy
 Optimalizace & soft omezení: algoritmy Soft propagace Klasická propagace: eliminace nekonzistentních hodnot z domén proměnných Soft propagace: propagace preferencí (cen) nad k-ticemi hodnot proměnných
Optimalizace & soft omezení: algoritmy Soft propagace Klasická propagace: eliminace nekonzistentních hodnot z domén proměnných Soft propagace: propagace preferencí (cen) nad k-ticemi hodnot proměnných
Úvod do mobilní robotiky NAIL028
 md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
Všechno, co jste kdy chtěli vědět o maticích, ale báli jste se zeptat
 Všechno, co jste kdy chtěli vědět o maticích, ale báli jste se zeptat Čtvercová matice n n, např. může reprezentovat: A = A A 2 A 3 A 2 A 22 A 23 A 3 A 32 A 33 matici koeficientů soustavy n lineárních
Všechno, co jste kdy chtěli vědět o maticích, ale báli jste se zeptat Čtvercová matice n n, např. může reprezentovat: A = A A 2 A 3 A 2 A 22 A 23 A 3 A 32 A 33 matici koeficientů soustavy n lineárních
Kreslení elipsy Andrej Podzimek 22. prosince 2005
 Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
= je prostý orientovaný graf., formálně c ( u, v) 0. dva speciální uzly: zdrojový uzel s a cílový uzel t. Dále budeme bez
 0. dva speciální uzly: zdrojový uzel s a cílový uzel t. Dále budeme bez") Síť Síť je čtveřice N = ( G, s, t, c) kde G ( V, A) = je prostý orientovaný graf a každé orientované hraně ( u, v) je přiřazeno nezáporné číslo, které se nazývá kapacita hrany ( u, v), formálně c ( u,
Síť Síť je čtveřice N = ( G, s, t, c) kde G ( V, A) = je prostý orientovaný graf a každé orientované hraně ( u, v) je přiřazeno nezáporné číslo, které se nazývá kapacita hrany ( u, v), formálně c ( u,
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Euklidovský prostor Stručnější verze
 [1] Euklidovský prostor Stručnější verze definice Eulidovského prostoru kartézský souřadnicový systém vektorový součin v E 3 vlastnosti přímek a rovin v E 3 a) eprostor-v2, 16, b) P. Olšák, FEL ČVUT, c)
[1] Euklidovský prostor Stručnější verze definice Eulidovského prostoru kartézský souřadnicový systém vektorový součin v E 3 vlastnosti přímek a rovin v E 3 a) eprostor-v2, 16, b) P. Olšák, FEL ČVUT, c)
Vytyčení polohy bodu polární metodou
 Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Výpočet průsečíků paprsku se scénou
 Výpočet průsečíků paprsku se scénou 1996-2018 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Intersection 2018 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 26 Průsečík
Výpočet průsečíků paprsku se scénou 1996-2018 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Intersection 2018 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 26 Průsečík
metoda Regula Falsi 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné metoda Regula Falsi Michal Čihák 23. října 2012 Metoda Regula Falsi hybridní metoda je kombinací metody sečen a metody půlení intervalů předpokladem je (podobně
Hledání kořenů rovnic jedné reálné proměnné metoda Regula Falsi Michal Čihák 23. října 2012 Metoda Regula Falsi hybridní metoda je kombinací metody sečen a metody půlení intervalů předpokladem je (podobně
DIPLOMOVÁ PRÁCE. Univerzita Karlova v Praze. Matematicko-fyzikální fakulta. Ondřej Luks Simultánní lokalizace a mapování v reálném prostředí
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Ondřej Luks Simultánní lokalizace a mapování v reálném prostředí Katedra softwarového inženýrství Vedoucí diplomové práce: Mgr.
Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Ondřej Luks Simultánní lokalizace a mapování v reálném prostředí Katedra softwarového inženýrství Vedoucí diplomové práce: Mgr.
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 2015
 Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 05 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 05 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
Regresní analýza. Eva Jarošová
 Regresní analýza Eva Jarošová 1 Obsah 1. Regresní přímka 2. Možnosti zlepšení modelu 3. Testy v regresním modelu 4. Regresní diagnostika 5. Speciální využití Lineární model 2 1. Regresní přímka 3 nosnost
Regresní analýza Eva Jarošová 1 Obsah 1. Regresní přímka 2. Možnosti zlepšení modelu 3. Testy v regresním modelu 4. Regresní diagnostika 5. Speciální využití Lineární model 2 1. Regresní přímka 3 nosnost
Zdrojem většiny příkladů je sbírka úloh 1. cvičení ( ) 2. cvičení ( )
 2. cvičení ( )") Příklady řešené na cvičení LA II - LS 1/13 Zdrojem většiny příkladů je sbírka úloh http://kam.mff.cuni.cz/~sbirka/ 1. cvičení (..13) 1. Rozhodněte, které z následujících operací jsou skalárním součinem
Příklady řešené na cvičení LA II - LS 1/13 Zdrojem většiny příkladů je sbírka úloh http://kam.mff.cuni.cz/~sbirka/ 1. cvičení (..13) 1. Rozhodněte, které z následujících operací jsou skalárním součinem
Maturitní témata z matematiky
 Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
Maturitní témata profilová část
 Seznam témat Výroková logika, úsudky a operace s množinami Základní pojmy výrokové logiky, logické spojky a kvantifikátory, složené výroky (konjunkce, disjunkce, implikace, ekvivalence), pravdivostní tabulky,
Seznam témat Výroková logika, úsudky a operace s množinami Základní pojmy výrokové logiky, logické spojky a kvantifikátory, složené výroky (konjunkce, disjunkce, implikace, ekvivalence), pravdivostní tabulky,
Pravděpodobnostní (Markovské) metody plánování, MDP - obsah
 metody plánování, MDP - obsah") Pravděpodobnostní (Markovské) metody plánování, MDP - obsah Pravděpodobnostní plánování - motivace. Nejistota ve výběr akce Markovské rozhodovací procesy Strategie plán (control policy) Částečně pozorovatelné
Pravděpodobnostní (Markovské) metody plánování, MDP - obsah Pravděpodobnostní plánování - motivace. Nejistota ve výběr akce Markovské rozhodovací procesy Strategie plán (control policy) Částečně pozorovatelné
stránkách přednášejícího.
 Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Čebyševovy aproximace
 Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
BAKALÁŘSKÁ PRÁCE. Numerické metody jednorozměrné minimalizace
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA MATEMATICKÉ ANALÝZY A APLIKACÍ MATEMATIKY BAKALÁŘSKÁ PRÁCE Numerické metody jednorozměrné minimalizace Vedoucí bakalářské práce: RNDr. Horymír
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA MATEMATICKÉ ANALÝZY A APLIKACÍ MATEMATIKY BAKALÁŘSKÁ PRÁCE Numerické metody jednorozměrné minimalizace Vedoucí bakalářské práce: RNDr. Horymír
VK CZ.1.07/2.2.00/
 Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická
 Variace 1 Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu
Variace 1 Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu
Úvod do mobilní robotiky AIL028
 zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 5. prosince 2005 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením (náznak řešení) Mapa světa - příklad Obsah Mapa
zbynek.winkler at mff.cuni.cz, md at robotika.cz http://robotika.cz/guide/umor05/cs 5. prosince 2005 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením (náznak řešení) Mapa světa - příklad Obsah Mapa
Zpracování náhodného vektoru. Ing. Michal Dorda, Ph.D.
 Ing. Michal Dorda, Ph.D. 1 Př. 1: Cestující na vybraném spoji linky MHD byli dotazováni za účelem zjištění spokojenosti s kvalitou MHD. Legenda 1 Velmi spokojen Spokojen 3 Nespokojen 4 Velmi nespokojen
Ing. Michal Dorda, Ph.D. 1 Př. 1: Cestující na vybraném spoji linky MHD byli dotazováni za účelem zjištění spokojenosti s kvalitou MHD. Legenda 1 Velmi spokojen Spokojen 3 Nespokojen 4 Velmi nespokojen
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Operační výzkum. Vícekriteriální hodnocení variant. Grafická metoda. Metoda váženého součtu.
 Operační výzkum Vícekriteriální hodnocení variant. Grafická metoda. Metoda váženého součtu. Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu
Operační výzkum Vícekriteriální hodnocení variant. Grafická metoda. Metoda váženého součtu. Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu
Maturitní témata z matematiky
 Maturitní témata z matematiky 1. Lineární rovnice a nerovnice a) Rovnice a nerovnice s absolutní hodnotou absolutní hodnota reálného čísla definice, geometrický význam, srovnání řešení rovnic s abs. hodnotou
Maturitní témata z matematiky 1. Lineární rovnice a nerovnice a) Rovnice a nerovnice s absolutní hodnotou absolutní hodnota reálného čísla definice, geometrický význam, srovnání řešení rovnic s abs. hodnotou
Kapitola 1: Reálné funkce 1/13
 Kapitola 1: Reálné funkce 1/13 Číselné množiny 2/13 N = {1, 2, 3, 4,... }... přirozená čísla N 0 = N {0} = {0, 1, 2, 3, 4,... } Z = {..., 2, 1, 0, 1, 2, 3, 4,... }... celá čísla Q = { p q p, q Z}... racionální
Kapitola 1: Reálné funkce 1/13 Číselné množiny 2/13 N = {1, 2, 3, 4,... }... přirozená čísla N 0 = N {0} = {0, 1, 2, 3, 4,... } Z = {..., 2, 1, 0, 1, 2, 3, 4,... }... celá čísla Q = { p q p, q Z}... racionální
Hledání kořenů rovnic jedné reálné proměnné metoda půlení intervalů Michal Čihák 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné metoda půlení intervalů Michal Čihák 23. října 2012 Problém hledání kořenů rovnice f(x) = 0 jeden ze základních problémů numerické matematiky zároveň i jeden
Hledání kořenů rovnic jedné reálné proměnné metoda půlení intervalů Michal Čihák 23. října 2012 Problém hledání kořenů rovnice f(x) = 0 jeden ze základních problémů numerické matematiky zároveň i jeden
Jazyk matematiky. 2.1. Matematická logika. 2.2. Množinové operace. 2.3. Zobrazení. 2.4. Rozšířená číslená osa
 2. Jazyk matematiky 2.1. Matematická logika 2.2. Množinové operace 2.3. Zobrazení 2.4. Rozšířená číslená osa 1 2.1 Matematická logika 2.1.1 Výrokový počet logická operace zapisujeme čteme česky negace
2. Jazyk matematiky 2.1. Matematická logika 2.2. Množinové operace 2.3. Zobrazení 2.4. Rozšířená číslená osa 1 2.1 Matematická logika 2.1.1 Výrokový počet logická operace zapisujeme čteme česky negace
Exponenciální a logaritmická funkce
 Variace 1 Exponenciální a logaritmická funkce Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Exponenciální
Variace 1 Exponenciální a logaritmická funkce Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Exponenciální
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
4EK311 Operační výzkum. 5. Teorie grafů
 4EK311 Operační výzkum 5. Teorie grafů 5. Teorie grafů definice grafu Graf G = uspořádaná dvojice (V, E), kde V označuje množinu n uzlů u 1, u 2,, u n (u i, i = 1, 2,, n) a E označuje množinu hran h ij,
4EK311 Operační výzkum 5. Teorie grafů 5. Teorie grafů definice grafu Graf G = uspořádaná dvojice (V, E), kde V označuje množinu n uzlů u 1, u 2,, u n (u i, i = 1, 2,, n) a E označuje množinu hran h ij,
M - Příprava na 3. čtvrtletní písemnou práci
 M - Příprava na 3. čtvrtletní písemnou práci Určeno pro třídu ODK VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem - EduBase. Více informací o programu naleznete
M - Příprava na 3. čtvrtletní písemnou práci Určeno pro třídu ODK VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem - EduBase. Více informací o programu naleznete
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Jan Březina. Technical University of Liberec. 21. dubna 2015
 TGH11 - Maximální párování a související problémy Jan Březina Technical University of Liberec 21. dubna 2015 Bipartitní grafy Bipartitní graf - je obarvitelný dvěma barvami. Tj. V lze rozělit na disjunktní
TGH11 - Maximální párování a související problémy Jan Březina Technical University of Liberec 21. dubna 2015 Bipartitní grafy Bipartitní graf - je obarvitelný dvěma barvami. Tj. V lze rozělit na disjunktní
(FAPPZ) Petr Gurka aktualizováno 12. října Přehled některých elementárních funkcí
 Petr Gurka aktualizováno 12. října Přehled některých elementárních funkcí") 1. Reálná funkce reálné proměnné, derivování (FAPPZ) Petr Gurka aktualizováno 12. října 2011 Obsah 1 Přehled některých elementárních funkcí 1 1.1 Polynomické funkce.......................... 1 1.2 Racionální
1. Reálná funkce reálné proměnné, derivování (FAPPZ) Petr Gurka aktualizováno 12. října 2011 Obsah 1 Přehled některých elementárních funkcí 1 1.1 Polynomické funkce.......................... 1 1.2 Racionální
Zpracování digitalizovaného obrazu (ZDO) - Popisy III
 - Popisy III") Zpracování digitalizovaného obrazu (ZDO) - Popisy III Statistické popisy tvaru a vzhledu Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování
Zpracování digitalizovaného obrazu (ZDO) - Popisy III Statistické popisy tvaru a vzhledu Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování
Úvod do úloh plánování rozvozu (Vehicle Routing Problems)
") Úvod do úloh plánování rozvozu (Vehicle Routing Problems) RNDr. Martin Branda, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta Katedra pravděpodobnosti a matematické statistiky Výpočetní
Úvod do úloh plánování rozvozu (Vehicle Routing Problems) RNDr. Martin Branda, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta Katedra pravděpodobnosti a matematické statistiky Výpočetní
Lineární klasifikátory
 Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
AVDAT Nelineární regresní model
 AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
Matematika I (KMI/PMATE)
") Přednáška první aneb Úvod do matematické analýzy Funkce a její vlastnosti Úvod do matematické analýzy Osnova přednášky pojem funkce definice funkce graf funkce definiční obor funkce obor hodnot funkce
Přednáška první aneb Úvod do matematické analýzy Funkce a její vlastnosti Úvod do matematické analýzy Osnova přednášky pojem funkce definice funkce graf funkce definiční obor funkce obor hodnot funkce
Úvod do mobilní robotiky AIL028
 md at robotika.cz, zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor07/cs 27. listopadu 2007 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením Mapa světa - příklad Obsah Mapa světa Exaktní
md at robotika.cz, zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor07/cs 27. listopadu 2007 1 Mapa světa Exaktní plánování 2 3 Plánování s otáčením Mapa světa - příklad Obsah Mapa světa Exaktní
Omezenost funkce. Definice. (shora, zdola) omezená na množině M D(f ) tuto vlastnost. nazývá se (shora, zdola) omezená tuto vlastnost má množina
 omezená na množině M D(f ) tuto vlastnost. nazývá se (shora, zdola) omezená tuto vlastnost má množina") Přednáška č. 5 Vlastnosti funkcí Jiří Fišer 22. října 2007 Jiří Fišer (KMA, PřF UP Olomouc) KMA MMAN1 Přednáška č. 4 22. října 2007 1 / 1 Omezenost funkce Definice Funkce f se nazývá (shora, zdola) omezená
Přednáška č. 5 Vlastnosti funkcí Jiří Fišer 22. října 2007 Jiří Fišer (KMA, PřF UP Olomouc) KMA MMAN1 Přednáška č. 4 22. října 2007 1 / 1 Omezenost funkce Definice Funkce f se nazývá (shora, zdola) omezená
Hranová konzistence. Arc consistency AC. Nejprve se zabýváme binárními CSP. podmínka odpovídá hraně v grafu podmínek
 Hranová konzistence Arc consistency AC Nejprve se zabýváme binárními CSP podmínka odpovídá hraně v grafu podmínek Hrana (V i, V j ) je hranově konzistentní, právě když pro každou hodnotu x z aktuální domény
Hranová konzistence Arc consistency AC Nejprve se zabýváme binárními CSP podmínka odpovídá hraně v grafu podmínek Hrana (V i, V j ) je hranově konzistentní, právě když pro každou hodnotu x z aktuální domény
VE 2D A 3D. Radek Výrut. Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského sumy
 25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
Vybraná témata z mobilní robotiky
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Vybraná témata z mobilní robotiky Učební texty k semináři Autoři: RNDr. Miroslav Kulich Ph.D. (ČVUT v Praze) Dr.rer.nat. Martin Saska (ČVUT v Praze) Datum: 17. 2. 2011 Centrum
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Vybraná témata z mobilní robotiky Učební texty k semináři Autoři: RNDr. Miroslav Kulich Ph.D. (ČVUT v Praze) Dr.rer.nat. Martin Saska (ČVUT v Praze) Datum: 17. 2. 2011 Centrum
Klasifikace a rozpoznávání. Bayesovská rozhodovací teorie
 Klasifikace a rozpoznávání Bayesovská rozhodovací teorie Extrakce p íznaků Granáty Četnost Jablka Váha [dkg] Pravděpodobnosti - diskrétní p íznaky Uvažujme diskrétní p íznaky váhové kategorie Nechť tabulka
Klasifikace a rozpoznávání Bayesovská rozhodovací teorie Extrakce p íznaků Granáty Četnost Jablka Váha [dkg] Pravděpodobnosti - diskrétní p íznaky Uvažujme diskrétní p íznaky váhové kategorie Nechť tabulka
Hledání kořenů rovnic jedné reálné proměnné metoda sečen Michal Čihák 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné metoda sečen Michal Čihák 23. října 2012 Opakování rovnice přímky Úloha: Určete rovnici přímky procházející body A[a, f(a)] a B[b, f(b)], kde f je funkce spojitá
Hledání kořenů rovnic jedné reálné proměnné metoda sečen Michal Čihák 23. října 2012 Opakování rovnice přímky Úloha: Určete rovnici přímky procházející body A[a, f(a)] a B[b, f(b)], kde f je funkce spojitá
1 Funkce dvou a tří proměnných
 1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Matematika (KMI/PMATE)
") Úvod do matematické analýzy Funkce a její vlastnosti Funkce a její vlastnosti Veličina Veličina - pojem, který popisuje kvantitativní (číselné) vlastnosti reálných i abstraktních objektů. Funkce a její
Úvod do matematické analýzy Funkce a její vlastnosti Funkce a její vlastnosti Veličina Veličina - pojem, který popisuje kvantitativní (číselné) vlastnosti reálných i abstraktních objektů. Funkce a její
Aproximace funkcí. x je systém m 1 jednoduchých, LN a dostatečně hladkých funkcí. x c m. g 1. g m. a 1. x a 2. x 2 a k. x k b 1. x b 2.
 Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Monte Carlo Lokalizace. Martin Skalský
 Monte Carlo Lokalizace Martin Skalský Proč Lokalizace? Problém určení pozice robota a věcí kolem něj. (filtrování dat, state estimation) Je důležitá Knowledge about where things are is at the core of any
Monte Carlo Lokalizace Martin Skalský Proč Lokalizace? Problém určení pozice robota a věcí kolem něj. (filtrování dat, state estimation) Je důležitá Knowledge about where things are is at the core of any
Newtonova metoda. 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
1 Klasická pravděpodobnost. Bayesův vzorec. Poslední změna (oprava): 11. května 2018 ( 6 4)( 43 2 ) ( 49 6 ) 3. = (a) 1 1 2! + 1 3!
: 11. května 2018 ( 6 4)( 43 2 ) ( 49 6 ) 3. = (a) 1 1 2! + 1 3!") Výsledky příkladů na procvičení z NMSA0 Klasická pravděpodobnost. 5. ( 4( 43 ( 49 3. 8! 3! 0! = 5 Poslední změna (oprava:. května 08 4. (a! + 3! + ( n+ n! = n k= ( k+ /k! = n k=0 ( k /k!; (b n k=0 ( k
Výsledky příkladů na procvičení z NMSA0 Klasická pravděpodobnost. 5. ( 4( 43 ( 49 3. 8! 3! 0! = 5 Poslední změna (oprava:. května 08 4. (a! + 3! + ( n+ n! = n k= ( k+ /k! = n k=0 ( k /k!; (b n k=0 ( k
Asociativní sítě (paměti) Asociace známého vstupního vzoru s daným výstupním vzorem. Typická funkce 1 / 44
 Asociace známého vstupního vzoru s daným výstupním vzorem. Typická funkce 1 / 44") Asociativní paměti Asociativní sítě (paměti) Cíl učení Asociace známého vstupního vzoru s daným výstupním vzorem Okoĺı známého vstupního vzoru x by se mělo také zobrazit na výstup y odpovídající x správný
Asociativní paměti Asociativní sítě (paměti) Cíl učení Asociace známého vstupního vzoru s daným výstupním vzorem Okoĺı známého vstupního vzoru x by se mělo také zobrazit na výstup y odpovídající x správný
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
Základy matematiky pro FEK
 Základy matematiky pro FEK 4. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 27 Množiny Zavedení pojmu množina je velice
Základy matematiky pro FEK 4. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 27 Množiny Zavedení pojmu množina je velice
Cvičné texty ke státní maturitě z matematiky
 Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Obsah Obsah NIŽŠÍ úroveň obtížnosti 4 MAGZD10C0K01 říjen 2010..........................
Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Obsah Obsah NIŽŠÍ úroveň obtížnosti 4 MAGZD10C0K01 říjen 2010..........................
2. Bodové pole a souřadnicové výpočty
 2. Bodové pole a souřadnicové výpočty 2.1 Body 2.2 Bodová pole 2.3 Polohové bodové pole. 2.3.1 Rozdělení polohového bodového pole. 2.3.2 Dokumentace geodetického bodu. 2.3.3 Stabilizace a signalizace bodů.
2. Bodové pole a souřadnicové výpočty 2.1 Body 2.2 Bodová pole 2.3 Polohové bodové pole. 2.3.1 Rozdělení polohového bodového pole. 2.3.2 Dokumentace geodetického bodu. 2.3.3 Stabilizace a signalizace bodů.
Otázky k ústní zkoušce, přehled témat A. Číselné řady
 Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
Přijímací zkouška na MFF UK v Praze
 Přijímací zkouška na MFF UK v Praze pro bakalářské studijní programy fyzika, informatika a matematika 017, varianta A U každé z deseti úloh je nabízeno pět odpovědí: a, b, c, d, e. Vaším úkolem je u každé
Přijímací zkouška na MFF UK v Praze pro bakalářské studijní programy fyzika, informatika a matematika 017, varianta A U každé z deseti úloh je nabízeno pět odpovědí: a, b, c, d, e. Vaším úkolem je u každé
Extrémy funkce dvou proměnných
 Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
Úvod do mobilní robotiky AIL028
 md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází
md at robotika.cz http://robotika.cz/guide/umor07/cs 20. prosince 2007 1 2 3D model světa ProMIS Cvičení hledání domečku Model štěrbinové kamery Idealizovaný jednoduchý model kamery Paprsek světla vychází