doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
|
|
|
- Rostislav Horák
- před 6 lety
- Počet zobrazení:
Transkript
1 doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1


2 Analýza signálu Analýza systému Vibrační signál vstup Výstup Vibrační odezva Předpoklad, že vibrace existují a že jsou generovány silami přítomnými v samotném systému. Když je tento vibrační signál analyzován, nazýváme to analýzou signálu. Analýza systémů versus analýza signálů Při vývoji nových struktur a v některých případech, kdy chceme detailně analyzovat existující struktury, vyvstává požadavek zkusit vytvořit model struktury tak, aby bylo možné pro známé vstupní síly vypočítat výstupní vibrace. Tento typ analýzy se nazývá analýza systémů. Elias Tomeh / Snímek 2
3 Analýza signálu Zjišťování a popis skutečné odezvy na síly v provozu: - Celková úroveň vibrací a hluku, - Frekvenční spektra a kepstra -Vlastní tvary kmitů, -Provozní tvary kimtů. Elias Tomeh / Snímek 3
4 Analýza systémů umožňuje zjišťování vlastností a charakteristik systémů. Např. na základě výsledků současného měření budicí síly a odezvy je možno určit frekvenční přenosovou charakteristiku: - dynamickou poddajnost H m.n -1, odezva výchylka, - mobilitu M m.s -1.N -1, odezva rychlost - akceleranci A m.s -2.N -1, odezva zrychlení. H, M, A jsou nezávislou charakteristickou vlastností lineárního systému, která se nemění. Modální parametry soustavy: - modální (vlastní) frekvence, - modální tlumení, - mody (vlastní tvary kmitu) jsou měřítkem dynamických charakteristik systému a určují zcela např. u automobilu pohodlí a bezpečnost za jízdy. Poddajnost (kompliance) - Compliance Frekvenční odezvová funkce závislosti výchylky na síle. Také se nazývá dynamická poddajnost. Akcelerance - Accelerance Funkce frekvenční odezvy zrychlení na sílu. Je rovněž označována jako inertance. Elias Tomeh / Snímek 4
5 Frekvenční přenosové funkce jednohmotové soustavy Dynamiku vibrující soustavy tzv. frekvenční přenosová funkce, která popisuje vztah mezi vstupem (buzení)do soustavy (silou) a výstupem (odezva) ze soustavy (výchylkou, rychlostí nebo zrychlením vibrací). Z tohoto pohledu je určena: dynamická tuhost (poddajnost) H (výchylka vibrací/síla), pohyblivost (mobilita) M (rychlost vibrací/síla), akcelerance A (zrychlení vibrací/síla). Elias Tomeh / Snímek 5

6 Diferenciální rovnice Jednohmotový model m.x b.x k.x F(t ) m... Hmotnost k... Tuhost b... Součinitel viskózního tlumení Elias Tomeh / Snímek 6
7 Řešení diferenciální rovnice Výchylka x A.e i( t ) Rychlost x A.i..e i( t ) Zrychlení x A. 2.e i( t ) Okamžitá výchylka: Okamžitá rychlost: Okamžitá hodnota zrychlení: x 0 A v 0 A. a 0 A. 2 Elias Tomeh / Snímek 7
8 Poddajnost xx 1 F m H 2 i..b k Pohyblivost Akcelerance M A x F x F 1 i.k m.i. b 1 i.b m k 2 Elias Tomeh / Snímek 8
9 Jak zjistit k, m, b? 1 m m A 1? k m k m k Elias Tomeh / Snímek 9? 1 b b A
10 NYQUISTŮV DIAGRAM znázornění odezvy v komplexní rovině Osy diagramu tvoří reálná a imaginární složky odezvy, Délka vektoru opisujícího Nyquistův křivku odpovídá amplitudě a úhel mezi tímto vektorem a reálnou osou znázorňuje fázový úhel mez buzením a odezvou, Každý bod Nyquistův diagramu odpovídá odezvě na určitém kmitočtu, Průměr kružnici závisí na stupni tlumení odpovídající rezonance, Přednost přenosných funkcí spočívají v tom, že jsou obsaženy tři zkoumané veličiny: -Amplituda -Fázový úhel Re θ f1 -Frekvence Z přenosové funkce lze snadno zjišťovat: vlastní frekvence, vlastní tvary kmitů, Φ1=45 A f0 f=0 součinitel jakosti soustavy Q, Φ2=45 ztrátový součinitel η, Im A součinitel kritického tlumení, 2 fázový úhel mezi buzením a odezvou. f2 Elias Tomeh / Snímek 10
![f[hz] NYQUISTŮV DIAGRAM f[hz] Re Re f0=18.](/docs-images/91/107655515/images/11-2.jpg "3[hz] Im Im [Hz] Příklad přenosové funkce s jedním stupeň volnosti Příklad přenosové funkce s více stupni")
11 f[hz] NYQUISTŮV DIAGRAM f[hz] Re Re f0=18.3[hz] Im Im [Hz] Příklad přenosové funkce s jedním stupeň volnosti Příklad přenosové funkce s více stupni volnosti Počet průsečíků udává počet stupni volnosti Elias Tomeh / Snímek 11

12 Odezvovým parametrem je výchylka - poddajnost Elias Tomeh / Snímek 12

13 Odezvovým parametrem je rychlost - mobilita Elias Tomeh / Snímek 13


14 Odezvovým parametrem je zrychlení - akcelerance Elias Tomeh / Snímek 14

15 Funkce koherence udává, jaká část měřeného výstupního signálu je lineárně závislá na měřeném vstupním signálu. Koherence s hodnotou 1 znamená dokonalý lineární vztah, koherence s hodnotou 0 znamená žádný vztah. Koherence leží vždy v intervalu <0;1>. Elias Tomeh / Snímek 15

16 Elias Tomeh / Snímek 16
17 Metoda stanovení frekvenční přenosové funkce Tato metoda vychází z úplné definice frekvenční přenosové funkce. Dvoukanálovým frekvenčním analyzátorem je měřena jak odezva, tak buzení soustavy. Buzení je provedeno rázovým kladívkem nebo pomocí budičů vibrací, které soustavu budí náhodným širokopásmovým šumem nebo řízeným harmonickým signálem. Analyzátor nebo příslušný software pak zobrazí akceleranci nebo jinou formu přenosové funkce. Velikost amplitud akcelerance není u lineárních soustav závislá na velikosti buzení. Pokud jsou jednotlivé frekvenční špičky provázeny změnou fáze mezi buzením a odezvou o /2, je s vysokou pravděpodobností identifikována vlastní frekvence. Elias Tomeh / Snímek 17
18 Metoda stanovení frekvenční přenosové funkce Výhody: metoda umí oddělit vlastní frekvence a frekvence způsobené vibracemi z pozadí pomocí fáze a/nebo koherence, metoda má dostatečně široký frekvenční rozsah, výsledky je možné využít i pro jiné účely, než je stanovení vlastních frekvencí. Nevýhody: metoda vyžaduje nákladnou měřicí a vyhodnocovací techniku, budiče a další zařízení, metoda vyžaduje vysoce kvalifikovaný personál, vysoká pozornost musí být věnována nastavení analyzátoru, metoda není vhodná do složitých provozních podmínek. Elias Tomeh / Snímek 18
19 REZONANCE Elias Tomeh / Snímek 19
20 Rezonance Rezonance značí rovnost mezi budicí frekvencí (vnějším zdrojem) a vlastní frekvencí (vnitřní vlastností soustavy). Rezonance je zdrojem vibrací, jehož podstata vychází z toku energie uvnitř pružné soustavy. Vnější buzení může být dáno jakoukoliv frekvencí zdrojů buzení např. frekvence VL, ozubených kol, Rezonance je stav kdy dochází ke změně fáze mezi buzením a odezvou o /2., Rezonance je stav kdy tlumení soustavy je podkritické, což značí: 2 b k.m 1 Podkritické tlumení Elias Tomeh / Snímek 20
21 Rezonance Vlastní frekvence se v rezonanci zesiluje a pokud by nebylo tlumení, amplituda by stoupla nad všechny meze Je nebezpečná pro chod stroje Je jedním ze základních problémů vibrační diagnostiky Čím je větší tlumení soustavy, tím je rezonanční křivka nižší a širší širší je pásmo v kterém se mění fázový úhel. Elias Tomeh / Snímek 21
22 Rezonanční oblast Činitel jakosti soustavy: (udává míru tlumení Ztrátový činitel: Součinitel kritického tlumení: Poměrný útlum: t f 0 Q f f 0 k f t 1 Q b k. m 2. m. b b p Pro netlumenou soustavu b p = 0 b k Jednou z metod, jak je možné určit tlumení v systému, je použití metody sbírání špiček. f o Elias Tomeh / Snímek 22
23 Rezonance Rezonance je pro provoz stroje nežádoucí, neboť přináší zvýšené dynamické namáhání. Z pohledu vibrodiagnostika je třeba: poznat vlastní frekvence diagnostikovaného objektu, stanovit budicí frekvence, posoudit možné rezonance, situaci řešit, to znamená rezonanci zabránit. V čem je rezonance nebezpečná pro životnost stroje? vlastní frekvence jsou vlastností každé pružné soustavy, ocelové strojní součásti nemívají vysoké vnitřní tlumení, většina strojů může pracovat při libovolném nastavení, což zvyšuje riziko rezonance, při rezonanci dochází k vysokému dynamickému namáhání stroje, rázové buzení vlivem vnitřních vůlí nebo uvolnění zvyšují riziko rezonance, rezonance se může frekvenčně posouvat tak, jak se mění technický stav stroje, rezonance může mít silný akustický projev. Elias Tomeh / Snímek 23
24 . Lineární soustava: Je soustava, u které odezva každého jejího prvku je lineárně závislá na buzení. Podstatu rezonance nejsnadněji ukážeme na vynuceném kmitavém pohybu lineární soustavy s 1 volnosti, buzené silou harmonického průběhu. m. hmotnost tuhého tělesa, k tuhost pružin b součiniteli tlumení tlumiče. Souřadnice x je uvažována jako výchylka z rovnovážné polohy. Pružina za pohybu působí na hmotu vratnou silou kx, tlumič tlumicí silou bẋ mx bx kx Ae it A amplituda budící síly ω úhlová frekvence budící síly t čas Elias Tomeh / Snímek 24
25 Závěr: - Vynucené vibrací, při němž malá změna frekvence budící síly má za následek zmenšení amplitudy ustálené vibrace se nazývá rezonancí. V rezonanci dosahuje amplituda svého maxima. - U netlumené soustavy roste amplituda vibrací nade všechny meze pro η = 1, tedy v případě, kdy úhlová frekvence budící síly f je rovna vlastní frekvenci fo. - U slabě tlumených soustav dochází k rezonanci, je-li budící frekvence v blízkosti vlastní frekvence netlumené soustavy a je spojena se značným nárůstem amplitudy vibrací. Např. u běžných ocelových konstrukcí činí až 16 i více. - Pro práci většiny strojních zařízení je to jev nežádoucí. - Velikost amplitudy vibrací v rezonanci je silně ovlivněna tlumením. Poměrný útlum, při kterém je rezonance zcela potlačena činí 0, 707 b p Elias Tomeh / Snímek 25
26 Nelineární soustavy: Mechanickou soustavu, která obsahuje alespoň jeden prvek, jehož charakteristika je popsána nelineární závislostí silových a kinetických veličin, nazýváme soustavou nelineární. Podle poměru budící frekvence f k frekvenci fo vlastní vibrace rozlišujeme u nelineárních soustav: Hlavní rezonance Ultraharmonická rezonance f f o f f o 1 1 q q = 2, 3 fo f2 f1 f [Hz Ultrasubharmonické rezonace f f o Subharmonické rezonance p q p q p, q = 2, 3 f fo p p = 2, 3 Poslední tři typy rezonancí nazýváme též rezonance vedlejší. Elias Tomeh / Snímek 26
27 Závěr: Subharmonická rezonance : se objevuje při několikanásobně vyšší frekvenci buzení, než odpovídá hlavní rezonanci. Subharmonické kmitání vzniká u slabě tlumených soustav, u silně tlumených se většinou neudrží. U nelineárních soustav obsahujících symetrickou charakteristiku pružného členu je nejvýraznější subharmonická rezonance řádu 1/3, vyjímečně 1/5 až 1/7. U soustav s nesymetrickou charakteristikou bývá nejvýraznější subharmonická rezonance řádu ½, další řádu 1/3, ¼ jsou již slabší, popř. u silněji tlumené soustavy vůbec nevzniknou. Ultraharmonická rezonance: se objevuje u nelineárních soustav buzených harmonickou silou s několikrát menší budicí frekvencí, než je vlastní frekvence. Ultraharmonická rezonance se projeví pouze mírným zvýšením rezonanční křivky, a proto ultraharmonická rezonance nebývá tak nebezpečná jako rezonance subharmonická. Elias Tomeh / Snímek 27
28 F1 L.S. fr F1 NL.S. 2.fR 3.fR 4.fR 5.fR Elias Tomeh / Snímek 28

29 Subsynchronní rezonance Elias Tomeh / Snímek 29


30 8. Rezonance Elias Tomeh / Snímek 30
31 VLASTNÍ FREKVENCE Elias Tomeh / Snímek 31
32 Vlastní frekvence Vlastní frekvence, kterou soustava kmitá, aniž by byla buzena Dochází k pravidelné přeměně potenciální v kinetickou energii a naopak Netlumené soustavy f o 1 2 k m Tlumené soustavy f o 1 2 k m b 2. m 2 Elias Tomeh / Snímek 32
33 Vlastní frekvence Je neoddělitelnou vlastností mechanických soustav Lze ji přeladit změnou k a m Lze ji tlumit Lze ji využít (energie z vnějšku je dodávána pouze pro pokrytí ztrát tlumením) m d m k c d F F Elias Tomeh / Snímek 33
34 Vlastní frekvence Vlastní frekvence závisí na základních parametrech soustavy, kterými jsou její hmotnost (m), tuhost (k) a tlumení (b). Na vlastní frekvenci je potenciální a kinetická energie vibrující soustavy v rovnováze. Do soustavy stačí vnést jednorázový impulz, který neustále mění formu energie a nebýt tlumení soustava by kmitala nekonečně dlouho. Na tomto principu fungují např. zvony nebo hudební nástroje (strunné, bubny atd.). Pokud je soustava mající vlastní frekvenci vystavena vibracím o stejné frekvenci, dochází k přetlaku vnitřní energie a soustava výrazně své vibrace zvyšuje, nastává rezonance. Rovnováhu drží pouze tlumení, bez něj by došlo k destrukci soustavy. Pokud si představíme hmotnost m uloženou na pružině o tuhosti k, bude vlastní frekvence této nejjednodušší soustavy rovna: f o 1 2 k m k m F b x Elias Tomeh / Snímek 34
35 Vlastní frekvence Z jednohmotového modelu lze odvodit následující poznatky: pokud má být vlastní frekvence zvýšena, je třeba zvýšit tuhost nebo snížit hmotnost soustavy, pokud má být vlastní frekvence snížena, je třeba snížit tuhost nebo zvýšit hmotnost soustavy. 1 f o 2 k m Elias Tomeh / Snímek 35
36 Vlastní frekvence Vlastní frekvence lze určit: Výpočtem, tzn. stanovit dokonalý model, popsat jej rovnicemi a vyřešit je, nebo použít pokročilejší numerické nástroje (např. metodu konečných prvků). Výhody: možnost modelování, v lepším poznání sledované soustavy a v tom, že není nutné mít k dispozici reálnou soustavu a měřidla. Nevýhody: tkví v nižší spolehlivosti odhadu a v nutnosti ovládat složitý matematický aparát. Experimentem, tedy měřením na skutečném objektu. Tato metoda je spolehlivá, v praxi rozšířená, vyžaduje však přítomnost reálného objektu a vlastnictví vibrační měřicí techniky. Elias Tomeh / Snímek 36
37 Metoda náhodného buzení Do soustavy je vnášena neměřená síla pomocí úderů kladívkem, dopadu sypkého materiálu nebo stříkání vody na její plochu. Měřena je pouze odezva. Vycházíme z předpokladu, že ostré rázy nebo náhodný dopad částic nebo kapek vyvolají širokopásmový zdroj síly, který na vlastních frekvencích vyvolá rezonanci a tudíž zesílení odezvy. Toto zesílení je pak ve spektru identifikováno vzrůstem amplitud na vlastních frekvencích s typickým tvarem. Velikost amplitud je úměrná intenzitě buzení a pro identifikaci vlastních frekvencí není významná. Elias Tomeh / Snímek 37
38 Metoda náhodného buzení Výhody: pro aplikaci metody lze použít jednokanálový frekvenční analyzátor, metoda je vhodná do provozních podmínek, nastavení analyzátoru je jednoduché a nemusí se lišit od nastavení pro vibrační diagnostiku (Hanningova časová váhová funkce, exponenciální průměrování). Nevýhody: špičky ve spektru odezvy nemusí být obecně dány jen rezonancí (mohou být způsobeny vibracemi z pozadí), z toho důvodu je nutné vibracím z pozadí maximálně zabránit, budicí signál má omezený frekvenční rozsah a je závislý na zkušenostech a možnostech vibrodiagnostika, u značně zatlumených soustav je metoda málo spolehlivá (málo citlivá). Elias Tomeh / Snímek 38
39 Vlastní frekvence a rezonance Druhy buzení soustavy 1. Bílý šum Signál s konstantní amplitudou v širokém pásmu frekvencí Vytvořen uměle Nejčastěji nahrávka 2. Rázový impuls Elias Tomeh / Snímek 39
40 Zkoušení zařízení a diagnostika Zkouška nárazem Zkouška vynucené odezvy 1) Zkouška nárazem Slouží pro stanovení vlastních frekvencí Využívá skutečnosti, že krátkodobý impuls má v sobě širokopásmové spektrum Používá se pro určení vlastností jednotlivých součástí (nehodí se pro sestavy a celky s vůlemi a nelinearitami) Zkouška nárazem je vhodná Pro rychlou orientaci V nepřístupných podmínkách Při použití jednokanálové měřicí techniky Pro soustavy s relativně malým tlumením Elias Tomeh / Snímek 40
41 2) Zkouška vynucené odezvy Slouží k určení rezonančních oblastí a kritických otáček u smontované soustavy Respektuje nelinearity (vůle) Využívá : - Umělé buzení, - Přirozené buzení Umělé buzení Využívají se přímočaré budiče vibrací Okamžité širokopásmové buzení Používají se příložné rotační budiče Lze budit na konkrétní frekvenci nebo při rozběhu a doběhu Přirozené buzení Využívá se rozběhových a doběhových testů Na viditelnou část hřídele lze pro zvýšení buzení přidat vystředěnou hmotu Vhodné pro souběhovou filtraci Elias Tomeh / Snímek 41
42 KRITICKÉ OTÁČKY Elias Tomeh / Snímek 42
43 Kritické otáčky Příčinou rezonance je rotorová frekvence a její násobky Oblast zvýšených vibrací v okolí rezonance Nezáleží na tom, zda je soustava lineární nebo nelineární Oblast kritických otáček by měla být pro stroj stanovena, vyhodnocena a případně vyloučena z možného nastavení Elias Tomeh / Snímek 43
44 Kritické otáčky - určení Lze určit výpočtem a měřením Měříme vlastní frekvence Vypočítáme budicí frekvence Nejlepší metodou identifikace je rozběhová a doběhová charakteristika Určí celé kritické pásmo Odhadne linearitu Ryze experimentální metoda Elias Tomeh / Snímek 44
45 Metoda doběhové/rozběhové funkce Tato metoda vychází z principu, kdy budicí síly nebudí soustavu z vnějšku, ale vznikají zevnitř především rotací hřídelů a/nebo buzením od ostatních zdrojů spojených s rotujícími hřídeli. Soustava buď zvyšuje budicí frekvenci při rozběhu nebo ji snižuje při doběhu z provozních otáček. Během změny budicích frekvencí z nebo na nulu jsou s pevnou periodou měřena frekvenční spektra, která postavena do kaskády ukazují vývoj amplitudy vibrací na jednotlivých budicích frekvencích. Velikost amplitudy závisí na intenzitě buzení, pro vyhodnocení je důležitý její vývoj a nárůst a poloha její stopy vzhledem k souřadnému systému. Buzení při rozběhu je intenzivní díky setrvačným vlastnostem a záběrovému momentu, doba rozběhu však bývá příliš krátká pro dostatečně spolehlivou identifikaci změn amplitud. Buzení při doběhu je bývá výhodnější díky delší době podmíněné velikostí pasivních odporů. Elias Tomeh / Snímek 45
46 Metoda doběhové/rozběhové funkce Výhody: metoda je relativně jednoduchá, vyžaduje pouze schopnost analyzátoru zaznamenávat multispektra, metoda je vhodná i pro nelineární systémy, nárůst amplitudy může značit i oblast nestability, výsledky přináší velké množství informací (o počtu harmonických složek, o časovém vývoji rozběhu/doběhu atd.), metoda je využitelná v provozních podmínkách, výsledky je možné využít i pro diagnostické účely. Nevýhody: metoda vyžaduje přiměřený čas pro rozběh/doběh, metoda není vhodná pro objekty ve vysokém stádiu poškození, metoda není vhodná pro složité objekty s komplikovanou kinematikou, výhodný je systém s dominantním buzení na rotorové frekvenci. Elias Tomeh / Snímek 46
47 Kritické otáčky změna polohy těžiště Elias Tomeh / Snímek 47
48 Příklad - Metoda doběhové/rozběhové funkce Označení měřicích míst rotačky Elias Tomeh / Snímek 48


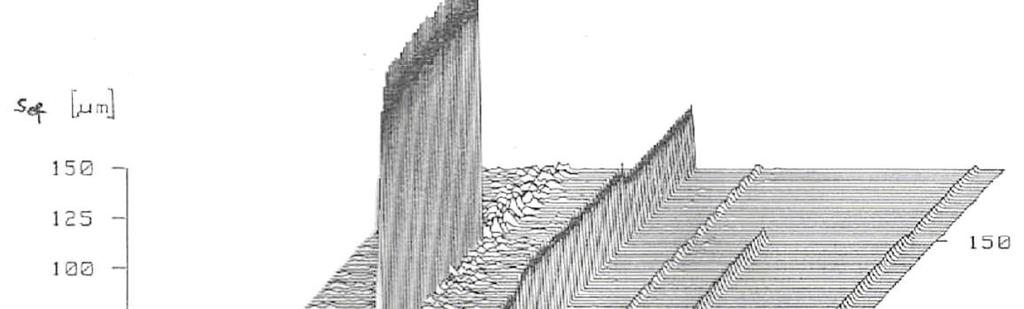
49 Kmitočtová mapa rozběhu první tiskové jednotky tiskového stroje Energetický obsah spekter vef ve frekvenčním rozsahu 5 až 60 Hz rozběhu výrazné rezonanční vibrací při výkonu stroje nad 18000a/h Elias Tomeh / Snímek 49



50 Kmitočtová mapa rozběhu druhé tiskové jednotky tiskového stroje Energetický obsah spekter vef ve frekvenčním rozsahu 5 až 200 Hz rozběhu- výrazné rezonanční vibrací při výkonu stroje nad 18000a/h Elias Tomeh / Snímek 50


51 Kmitočtová mapa doběhu prvé tiskové jednotky charakter vibrací je shodný s výše závěry. Závěr: Max. výkon tiskového stroje archů/h Pracovní rozsah je do archů/h Nad archů/h je výrazné rezonanční vibrací, v tomto režimu stroj nesmí pracovat Elias Tomeh / Snímek 51
52 Děkuji Vám za pozornost Elias Tomeh / Snímek 52
Stroboskopické metody vibrační diagnostiky
 Inovovaná přednáška/seminář studijního programu Strojní inženýrství Stroboskopické metody vibrační diagnostiky Zpracoval: Pracoviště: Pavel Němeček Katedra vozidel a motorů, Fakulta strojní, TU v Liberci
Inovovaná přednáška/seminář studijního programu Strojní inženýrství Stroboskopické metody vibrační diagnostiky Zpracoval: Pracoviště: Pavel Němeček Katedra vozidel a motorů, Fakulta strojní, TU v Liberci
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 DEFINICE Vibrace: je střídavý pohyb kolem určité referenční polohy, který je popsán časem a amplitudou počtu - frekvence vztažená
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 DEFINICE Vibrace: je střídavý pohyb kolem určité referenční polohy, který je popsán časem a amplitudou počtu - frekvence vztažená
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání a vlnění
 Mechanické kmitání a vlnění Pohyb tělesa, který se v určitém časovém intervalu pravidelně opakuje periodický pohyb S kmitavým pohybem se setkáváme např.: Zařízení, které volně kmitá, nazýváme mechanický
Mechanické kmitání a vlnění Pohyb tělesa, který se v určitém časovém intervalu pravidelně opakuje periodický pohyb S kmitavým pohybem se setkáváme např.: Zařízení, které volně kmitá, nazýváme mechanický
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
ω=2π/t, ω=2πf (rad/s) y=y m sin ωt okamžitá výchylka vliv má počáteční fáze ϕ 0
 y=y m sin ωt okamžitá výchylka vliv má počáteční fáze ϕ 0") Kmity základní popis kmitání je periodický pohyb, při kterém těleso pravidelně prochází rovnovážnou polohou mechanický oscilátor zařízení vykonávající kmity Základní veličiny Perioda T [s], frekvence f=1/t
Kmity základní popis kmitání je periodický pohyb, při kterém těleso pravidelně prochází rovnovážnou polohou mechanický oscilátor zařízení vykonávající kmity Základní veličiny Perioda T [s], frekvence f=1/t
Laboratorní úloha č. 4 - Kmity II
 Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
Laboratorní úloha č. 4 - Kmity II Úkoly měření: 1. Seznámení s měřením na přenosném dataloggeru LabQuest 2 základní specifikace přístroje, způsob zapojení přístroje, záznam dat a práce se senzory, vyhodnocování
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Kratší perioda znamená vyšší frekvence Elias Tomeh / Snímek 2 Elias Tomeh / Snímek 3 Elias Tomeh / Snímek 4 m s Hmotnost snímače
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Kratší perioda znamená vyšší frekvence Elias Tomeh / Snímek 2 Elias Tomeh / Snímek 3 Elias Tomeh / Snímek 4 m s Hmotnost snímače
doc. Dr. Ing. Elias TOMEH
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Analýza spekter vibrací Amplituda vibrací x, v, a 1) Kinematické schéma, vibrací - n, z1,z2..,typy VL, - průměr řemenic. 2) Výběr
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Analýza spekter vibrací Amplituda vibrací x, v, a 1) Kinematické schéma, vibrací - n, z1,z2..,typy VL, - průměr řemenic. 2) Výběr
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností
 na téma Podklady k principu měření vibrací a tlumicích vlastností") Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
Výukové texty pro předmět Měřící technika (KKS/MT) na téma Podklady k principu měření vibrací a tlumicích vlastností Autor: Doc. Ing. Josef Formánek, Ph.D. Podklady k principu měření vibrací a tlumicích
MECHANICKÉ KMITÁNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Příklady kmitavých pohybů. Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů.
 Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
Rotující soustavy, měření kritických otáček, typické projevy dynamiky rotorů www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Rotující soustavy 2. Základní model rotoru Lavalův rotor 3. Nevyváženost rotoru
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Mechanické kmitání (oscilace)
") Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Mechanické kmitání (oscilace) pohyb, při kterém se těleso střídavě vychyluje v různých směrech od rovnovážné polohy př. kyvadlo Příklady kmitavých pohybů kyvadlo v pendlovkách struna hudebního nástroje
Czech Technical University in Prague Faculty of Electrical Engineering. Fakulta elektrotechnická. České vysoké učení technické v Praze.
 Nejprve několik fyzikálních analogií úvodem Rezonance Rezonance je fyzikálním jevem, kdy má systém tendenci kmitat s velkou amplitudou na určité frekvenci, kdy malá budící síla může vyvolat vibrace s velkou
Nejprve několik fyzikálních analogií úvodem Rezonance Rezonance je fyzikálním jevem, kdy má systém tendenci kmitat s velkou amplitudou na určité frekvenci, kdy malá budící síla může vyvolat vibrace s velkou
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu
 Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Téma: Dynamika - Úvod do stavební dynamiky
 Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
PROVOZ, DIAGNOSTIKA A ÚDRŽBA STROJŮ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ PROVOZ, DIAGNOSTIKA A ÚDRŽBA STROJŮ ZÁKLADNÍ PORUCHY A JEJICH PROJEVY VE FREKVENČNÍCH SPEKTRECH doc. Ing. Helebrant František, CSc. Ing.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ PROVOZ, DIAGNOSTIKA A ÚDRŽBA STROJŮ ZÁKLADNÍ PORUCHY A JEJICH PROJEVY VE FREKVENČNÍCH SPEKTRECH doc. Ing. Helebrant František, CSc. Ing.
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
P9 Provozní tvary kmitů
 P9 Provozní tvary kmitů (měření a vyhodnocení) Pozn. Matematické základy pro tuto přednášku byly uvedeny v přednáškách Metody spektrální analýzy mechanických systémů Co jsou provozní tvary kmitů? Provozní
P9 Provozní tvary kmitů (měření a vyhodnocení) Pozn. Matematické základy pro tuto přednášku byly uvedeny v přednáškách Metody spektrální analýzy mechanických systémů Co jsou provozní tvary kmitů? Provozní
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Experimentální dynamika (motivace, poslání, cíle)
") Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
Experimentální dynamika (motivace, poslání, cíle) www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Motivace, poslání, cíle 2. Dynamické modely v mechanice 3. Vibrace přehled, proč a jak měřit 4. Frekvenční
Hluk a analýza vibrací stěn krytu klimatizační jednotky
 XXVI. ASR '00 Seminar, Instruments and Control, Ostrava, April 6-7, 00 Paper Hluk a analýza vibrací stěn krytu klimatizační jednotky KOČÍ, Petr Ing., Katedra ATŘ-, VŠB-TU Ostrava, 7. listopadu, Ostrava
XXVI. ASR '00 Seminar, Instruments and Control, Ostrava, April 6-7, 00 Paper Hluk a analýza vibrací stěn krytu klimatizační jednotky KOČÍ, Petr Ing., Katedra ATŘ-, VŠB-TU Ostrava, 7. listopadu, Ostrava
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH. Jiří Tůma
 ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
ZVIDITELŇOVÁNÍ VIBRACÍ STROJNÍCH ZAŘÍZENÍ
 25 let společných mezinárodních sympozií TU v Liberci TU Dresden 1976 2001 ZVIDITELŇOVÁNÍ VIBRACÍ STROJNÍCH ZAŘÍZENÍ Pavel NĚMEČEK Josef LAURIN Úvod Diagnostika strojních zařízení je proces, při kterém
25 let společných mezinárodních sympozií TU v Liberci TU Dresden 1976 2001 ZVIDITELŇOVÁNÍ VIBRACÍ STROJNÍCH ZAŘÍZENÍ Pavel NĚMEČEK Josef LAURIN Úvod Diagnostika strojních zařízení je proces, při kterém
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
Mechanické kmitání Kinematika mechanického kmitání Vojtěch Beneš
 Mechanické kmitání Vojtěch Beneš Výstup RVP: Klíčová slova: žák užívá základní kinematické vztahy při řešení problémů a úloh o pohybech mechanické kmitání, kinematika, harmonický oscilátor Sexta Příprava
Mechanické kmitání Vojtěch Beneš Výstup RVP: Klíčová slova: žák užívá základní kinematické vztahy při řešení problémů a úloh o pohybech mechanické kmitání, kinematika, harmonický oscilátor Sexta Příprava
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
POHON 4x4 JAKO ZDROJ VIBRACÍ OSOBNÍHO AUTOMOBILU
 POHON 4x4 JAKO ZDROJ VIBRACÍ OSOBNÍHO AUTOMOBILU Pavel NĚMEČEK, Technická univerzita v Liberci 1 Radek KOLÍNSKÝ, Technická univerzita v Liberci 2 Anotace: Příspěvek popisuje postup identifikace zdrojů
POHON 4x4 JAKO ZDROJ VIBRACÍ OSOBNÍHO AUTOMOBILU Pavel NĚMEČEK, Technická univerzita v Liberci 1 Radek KOLÍNSKÝ, Technická univerzita v Liberci 2 Anotace: Příspěvek popisuje postup identifikace zdrojů
1.16 Vibrodiagnostika Novelizováno:
 Vypracoval Gestor Schválil Listů Příloh Bc. Pavel Pantlík, Milan Melichar PSZ PS 5 Technické podmínky pro vibrodiagnostiku strojních zařízení. Standard platí pro všechny závody ŠkodaAuto. Obsah: 1. Definice
Vypracoval Gestor Schválil Listů Příloh Bc. Pavel Pantlík, Milan Melichar PSZ PS 5 Technické podmínky pro vibrodiagnostiku strojních zařízení. Standard platí pro všechny závody ŠkodaAuto. Obsah: 1. Definice
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17
 Obsah 1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17 3.1 MOŽNOSTI POSUZOVÁNÍ TECHNICKÉHO STAVU ASYNCHRONNÍCH ELEKTROMOTORŮ 23 3.2 ZAČLENĚNÍ
Obsah 1 ÚVOD 14 2 KDEZAČÍT SE SPOLEHLIVOSTÍASYNCHRONNÍCH ELEKTROMOTORŮ 16 3 BEZDEMONTÁŽNÍ TECHNICKÁDIAGNOSTIKA 17 3.1 MOŽNOSTI POSUZOVÁNÍ TECHNICKÉHO STAVU ASYNCHRONNÍCH ELEKTROMOTORŮ 23 3.2 ZAČLENĚNÍ
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole
 5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
obhajoba diplomové práce
 České vysoké učení technické v Praze, Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky obhajoba diplomové práce v Praze, srpen 2014 autor: vedoucí: Ing. Pavel Steinbauer, Ph.D. Modální zkouška
České vysoké učení technické v Praze, Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky obhajoba diplomové práce v Praze, srpen 2014 autor: vedoucí: Ing. Pavel Steinbauer, Ph.D. Modální zkouška
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
elektrické filtry Jiří Petržela filtry založené na jiných fyzikálních principech
 Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
Jiří Petržela filtry založené na jiných fyzikálních principech piezoelektrický jev při mechanickém namáhání krystalu ve správném směru na něm vzniká elektrické napětí po přiložení elektrického napětí se
1.7.4. Skládání kmitů
 .7.4. Skládání kmitů. Umět vysvětlit pojem superpozice.. Umět rozdělit různé typy skládání kmitů podle směru a frekvence. 3. Umět určit amplitudu a fázi výsledného kmitu. 4. Vysvětlit pojem fázor. 5. Znát
.7.4. Skládání kmitů. Umět vysvětlit pojem superpozice.. Umět rozdělit různé typy skládání kmitů podle směru a frekvence. 3. Umět určit amplitudu a fázi výsledného kmitu. 4. Vysvětlit pojem fázor. 5. Znát
Harmonické oscilátory
 Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Harmonické oscilátory Jakub Kákona, kaklik@mlab.cz Abstrakt Tato úloha se zabývá měřením rezonančních vlastností mechanických tlumených i netlumených oscilátorů. 1 Úvod 1. Změřte tuhost pružiny statickou
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Elias Tomeh / Snímek 2 Elias Tomeh / Snímek 3 Elias Tomeh / Snímek 4 ZÁKLADNÍ VIBRODIAGNOSTICKÉ MĚŘICÍ METODY Měření celkových
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Elias Tomeh / Snímek 2 Elias Tomeh / Snímek 3 Elias Tomeh / Snímek 4 ZÁKLADNÍ VIBRODIAGNOSTICKÉ MĚŘICÍ METODY Měření celkových
Fyzika - Sexta, 2. ročník
 - Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
- Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa
 pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
Matematickým modelem soustavy je známá rovnice (1)
") 1. Lineární dynamické systémy 1.1 Rezonanční charakteristiky lineárních systémů s jedním stupněm volnosti Závislost amplitudy vynucených kmitů na frekvenci nazýváme amplitudo-frekvenční charakteristikou.
1. Lineární dynamické systémy 1.1 Rezonanční charakteristiky lineárních systémů s jedním stupněm volnosti Závislost amplitudy vynucených kmitů na frekvenci nazýváme amplitudo-frekvenční charakteristikou.
Snižování hlukové emise moderní automobilové převodovky. Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka
 Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
Snižování hlukové emise moderní automobilové převodovky Prezentace: Pojednání ke státní doktorské zkoušce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ v BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2008 Obsah Úvod do
Vibroakustická diagnostika
 Vibroakustická diagnostika frekvenční analýza, ultrazvukové emise Vibroakustické metody Vibroakustika jako hlavní diagnostický signál používá chvění kmitání vibrace hlučnost Použitý diagnostický signál
Vibroakustická diagnostika frekvenční analýza, ultrazvukové emise Vibroakustické metody Vibroakustika jako hlavní diagnostický signál používá chvění kmitání vibrace hlučnost Použitý diagnostický signál
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
ZATÍŽENÍ KŘÍDLA - I. Rozdělení zatížení. Aerodynamické zatížení vztlakových ploch
 ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
ZATÍŽENÍ KŘÍDLA - I Rozdělení zatížení - Letová a pozemní letová = aerodyn.síly, hmotové síly (tíha + setrvačné síly), tah pohon. jednotky + speciální zatížení (střet s ptákem, pozemní = aerodyn. síly,
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Hlavní parametry rádiových přijímačů
 Hlavní parametry rádiových přijímačů Zpracoval: Ing. Jiří Sehnal Pro posouzení základních vlastností rádiových přijímačů jsou zavedena normalizovaná kritéria parametry, podle kterých se rádiové přijímače
Hlavní parametry rádiových přijímačů Zpracoval: Ing. Jiří Sehnal Pro posouzení základních vlastností rádiových přijímačů jsou zavedena normalizovaná kritéria parametry, podle kterých se rádiové přijímače
Změna přesnosti obrábění vlivem vibrací stroje
 Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 9 měna přesnosti obrábění vlivem vibrací stroje KOČÍ, Petr, Ing. Katedra ATŘ-352, VŠB-TU
Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 9 měna přesnosti obrábění vlivem vibrací stroje KOČÍ, Petr, Ing. Katedra ATŘ-352, VŠB-TU
Laboratorní úloha č. 3 - Kmity I
 Laboratorní úloha č. 3 - Kmity I Úkoly měření: 1. Seznámení se s měřením na osciloskopu nastavení a měření základních veličin ve fyzice (frekvence, perioda, amplituda, harmonické, neharmonické kmity).
Laboratorní úloha č. 3 - Kmity I Úkoly měření: 1. Seznámení se s měřením na osciloskopu nastavení a měření základních veličin ve fyzice (frekvence, perioda, amplituda, harmonické, neharmonické kmity).
Fyzikální praktikum 1
 Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
Obr. 9.1 Kontakt pohyblivé části s povrchem. Tomuto meznímu stavu za klidu odpovídá maximální síla, která se nezývá adhezní síla,. , = (9.
 9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
8.6 Dynamika kmitavého pohybu, pružinový oscilátor
 8.6 Dynamika kmitavého pohybu, pružinový oscilátor a) dynamika zkoumá příčiny pohybu b) velikost síly vyvolávající harmonický kmitavý pohyb F = ma = mω 2 y pohybová rovnice (II. N. z. a = ω 2 y m sin ωt
8.6 Dynamika kmitavého pohybu, pružinový oscilátor a) dynamika zkoumá příčiny pohybu b) velikost síly vyvolávající harmonický kmitavý pohyb F = ma = mω 2 y pohybová rovnice (II. N. z. a = ω 2 y m sin ωt
Fyzika 6. ročník. přesahy, vazby, mezipředmětové vztahy průřezová témata. témata / učivo. očekávané výstupy RVP. očekávané výstupy ŠVP
 očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
očekávané výstupy RVP témata / učivo 1. Časový vývoj mechanických soustav Studium konkrétních příkladů 1.1 Pohyby družic a planet Keplerovy zákony Newtonův gravitační zákon (vektorový zápis) pohyb satelitů
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Přenos pasivního dvojbranu RC
 Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
DUM označení: VY_32_INOVACE_... Jméno autora výukového materiálu: Ing. Jitka Machková Škola: Základní škola a mateřská škola Josefa Kubálka Všenory
 DUM označení: VY_32_INOVACE_... Jméno autora výukového materiálu: Ing. Jitka Machková Škola: Základní škola a mateřská škola Josefa Kubálka Všenory Karla Majera 370, 252 31 Všenory. Datum (období) vytvoření:
DUM označení: VY_32_INOVACE_... Jméno autora výukového materiálu: Ing. Jitka Machková Škola: Základní škola a mateřská škola Josefa Kubálka Všenory Karla Majera 370, 252 31 Všenory. Datum (období) vytvoření:
Ing. Václav Losík. Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA
 Ing. Václav Losík Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA Obr. 0 Ocelový otočný sloupový jeřáb OS 5/5 MD I. Popis objektu a úlohy Jedná se o ocelový otočný sloupový jeřáb
Ing. Václav Losík Dynamický výpočet otočného sloupového jeřábu OS 5/5 MD TECHNICKÁ ZPRÁVA Obr. 0 Ocelový otočný sloupový jeřáb OS 5/5 MD I. Popis objektu a úlohy Jedná se o ocelový otočný sloupový jeřáb
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
Testovací příklady MEC2
 Testovací příklady MEC2 1. Určete, jak velká práce se vykoná při stlačení pružiny nárazníku železničního vagónu o w = 5 mm, když na její stlačení o w =15 mm 1 je zapotřebí síla F = 3 kn. 2. Jaké musí být
Testovací příklady MEC2 1. Určete, jak velká práce se vykoná při stlačení pružiny nárazníku železničního vagónu o w = 5 mm, když na její stlačení o w =15 mm 1 je zapotřebí síla F = 3 kn. 2. Jaké musí být
Téma 13, Úvod do dynamiky stavebních konstrukcí dynamiky
 Statika staveních konstrukcí II., 3.ročník akalářského studia Téma 3, Úvod do dynamiky staveních konstrukcí dynamiky Úvod Vlastní kmitání Vynucené kmitání Tlumené kmitání Podmínky dynamické rovnováhy konstrukcí
Statika staveních konstrukcí II., 3.ročník akalářského studia Téma 3, Úvod do dynamiky staveních konstrukcí dynamiky Úvod Vlastní kmitání Vynucené kmitání Tlumené kmitání Podmínky dynamické rovnováhy konstrukcí
vibrodiagnostika: v kritických bodech se měří a vyhodnocuje mechanické kmitání,
 vibrodiagnostika: v kritických bodech se měří a vyhodnocuje mechanické kmitání, diagnostika modální analýzou: měří se a vyhodnocují vlastní frekvence mechanické konstrukce a jejich tlumení, hluková diagnostika:
vibrodiagnostika: v kritických bodech se měří a vyhodnocuje mechanické kmitání, diagnostika modální analýzou: měří se a vyhodnocují vlastní frekvence mechanické konstrukce a jejich tlumení, hluková diagnostika:
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Snižování hlukové emise moderní automobilové převodovky
 Snižování hlukové emise moderní automobilové převodovky Obhajoba disertační práce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2009 Obsah Úvod do problematiky Vymezení
Snižování hlukové emise moderní automobilové převodovky Obhajoba disertační práce Ing. Milan Klapka VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ 2009 Obsah Úvod do problematiky Vymezení
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Fyzika IV Dynamika jader v molekulách
 Dynamika jader v molekulách vibrace rotace Dynamika jader v molekulách rotační energetické hladiny (dvouatomová molekula) moment setrvačnosti kolem osy procházející těžištěm osa těžiště m2 m1 r2 r1 R moment
Dynamika jader v molekulách vibrace rotace Dynamika jader v molekulách rotační energetické hladiny (dvouatomová molekula) moment setrvačnosti kolem osy procházející těžištěm osa těžiště m2 m1 r2 r1 R moment
Mechanické kmitání a vlnění, Pohlovo kyvadlo
 Fyzikální praktikum FJFI ČVUT v Praze Mechanické kmitání a vlnění, Pohlovo kyvadlo Číslo úlohy: 10 Jméno: Vojtěch HORNÝ Spolupracoval: Jaroslav Zeman Datum : 26. 10. 2009 Číslo kroužku: pondělí 13:30 Číslo
Fyzikální praktikum FJFI ČVUT v Praze Mechanické kmitání a vlnění, Pohlovo kyvadlo Číslo úlohy: 10 Jméno: Vojtěch HORNÝ Spolupracoval: Jaroslav Zeman Datum : 26. 10. 2009 Číslo kroužku: pondělí 13:30 Číslo
6. Viskoelasticita materiálů
 6. Viskoelasticita materiálů Viskoelasticita materiálů souvisí se schopností materiálů tlumit mechanické vibrace. Uvažujme harmonické dynamické namáhání (tzn. střídavě v tahu a tlaku) materiálu v oblasti
6. Viskoelasticita materiálů Viskoelasticita materiálů souvisí se schopností materiálů tlumit mechanické vibrace. Uvažujme harmonické dynamické namáhání (tzn. střídavě v tahu a tlaku) materiálu v oblasti
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ
 B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
Wöhlerova křivka (uhlíkové oceli výrazná mez únavy)
") Únava 1. Úvod Mezním stavem únava je definován stav, kdy v důsledku působení časově proměnných zatížení dojde k poruše funkční způsobilosti konstrukce či jejího elementu. Charakteristické pro tento proces
Únava 1. Úvod Mezním stavem únava je definován stav, kdy v důsledku působení časově proměnných zatížení dojde k poruše funkční způsobilosti konstrukce či jejího elementu. Charakteristické pro tento proces
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ TĚŽIŠTĚ
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
VIBRAČNÍ DIAGNOSTIKA ZÁKLADNÍCH ZÁVAD STROJŮ
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta strojní Katedra vozidel a motorů VIBRAČNÍ DIAGNOSTIKA ZÁKLADNÍCH ZÁVAD STROJŮ Doc. Dr. Ing. Pavel NĚMEČEK Doc. Dr. Ing. Elias TOMEH LIBEREC 2010 1 OBSAH POŽITÁ OZNAČENÍ...
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta strojní Katedra vozidel a motorů VIBRAČNÍ DIAGNOSTIKA ZÁKLADNÍCH ZÁVAD STROJŮ Doc. Dr. Ing. Pavel NĚMEČEK Doc. Dr. Ing. Elias TOMEH LIBEREC 2010 1 OBSAH POŽITÁ OZNAČENÍ...
filtry FIR zpracování signálů FIR & IIR Tomáš Novák
 filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
filtry FIR 1) Maximální překývnutí amplitudové frekvenční charakteristiky dolní propusti FIR řádu 100 je podle obr. 1 na frekvenci f=50hz o velikosti 0,15 tedy 1,1dB; přechodové pásmo je v rozsahu frekvencí
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
14 - Moderní frekvenční metody
 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zkušenosti zkušební laboratoře ITC v oblasti zkoušení komponentů pro automobilový průmysl
 Zkušenosti zkušební laboratoře ITC v oblasti zkoušení komponentů pro automobilový průmysl 1. Úvod Naše laboratoř ITC divize 4 MESIT QM má dlouholetou tradici ve zkoušení komponentů pro leteckou techniku.
Zkušenosti zkušební laboratoře ITC v oblasti zkoušení komponentů pro automobilový průmysl 1. Úvod Naše laboratoř ITC divize 4 MESIT QM má dlouholetou tradici ve zkoušení komponentů pro leteckou techniku.
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Spolehlivost a bezpečnost staveb zkušební otázky verze 2010
 1 Jaká máme zatížení? 2 Co je charakteristická hodnota zatížení? 3 Jaké jsou reprezentativní hodnoty proměnných zatížení? 4 Jak stanovíme návrhové hodnoty zatížení? 5 Jaké jsou základní kombinace zatížení
1 Jaká máme zatížení? 2 Co je charakteristická hodnota zatížení? 3 Jaké jsou reprezentativní hodnoty proměnných zatížení? 4 Jak stanovíme návrhové hodnoty zatížení? 5 Jaké jsou základní kombinace zatížení
Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);
, který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);") Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Náhodné chyby přímých měření
 Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky