Modelování a simulace
|
|
|
- Dominika Eliška Šmídová
- před 8 lety
- Počet zobrazení:
Transkript
1 Vysoká škola báňská Technická univerzita Ostrava Hornicko-geologická fakulta Institut ekonomiky a systémů řízení Modelování a simulace Ostrava 2012 Ing. Lukáš Otte, Ph.D.
2 Obsah Otázky Úvod Základní pojmy Význam, účel a výhody uplatnění simulačních modelů Simulační proces Matematické modely Klasifikace matematických modelů Příklad tvorby matematického modelu analytickým způsobem... 12
3 Otázky Předmět: zkoušející: Modelování a simulace Ing. Lukáš Otte, Ph.D. 1. Význam, účel a výhody uplatnění simulačních modelů 2. Fáze simulačního procesu 3. Matematické modely, jejich klasifikace, zavádění zjednodušujících podmínek 4. Typy dynamických systémů a jejich matematická formulace 5. Způsoby tvorby matematických modelů spojitých dyn. systémů - identifikace systémů 6. Strejcova metoda 7. Identifikace soustav s kmitavou odezvou a dopravním zpožděním 8. Identifikace soustav s dopravním zpožděním. 9. Matematické modely lineárních spojitých systémů 10. Matematické modely prvků s operačními zesilovači 11. Matematické modely regulačních obvodů 12. Analytický způsob tvorby matematického modelu metodika postupného vytváření relací 13. Teoretický počítačový model 14. Metoda nepřímého programování 15. Metoda přímého programování 16. Dynamické přizpůsobení počítačového modelu 17. Citlivostní analýza modelu 1. Úvod V dnešní době je nutné, aby podniky a firmy využívaly své finanční prostředky a různé další zdroje efektivně. Pro efektivní využití všech zdrojů je vhodné, aby jejich použití bylo dobře naplánováno. Ke správnému plánování je zapotřebí spousta informací a někdy tyto informace nemůžeme získat jinak, než tím, že budeme modelovat něco, co ještě nenastalo. Tímto způsobem si můžeme ověřit nebo i vyvrátit případné hypotézy dalšího průběhu, který může ovlivnit chod celého podniku či firmy. Podobné je to i s řízením a teď ne podniku či firmy, ale spíše strojů a zařízení. Pokud chceme řídit nějaký stroj či zařízení, obecně systém, pak je vždy nutné vědět, jaké vlastnosti tento systém má a jak se bude chovat v některých situacích. Ve výsledku jde o snahu o neustálé zvyšování produktivity práce s úkolem hledat nové pracovní postupy s minimální spotřebou času a nákladů, kdy jednotlivé pracovní úkony musí být co nejkratší a nejjednodušší, aby vyžadovaly minimum lidských sil. Zároveň jde o nalezení vhodného řešení technických úloh bez toho, aby došlo k ohrožení funkčnosti systému. I v této otázce nám může pomoci modelování a následná simulace systému. Díky modelování reálného systému a následně na modelu provedeným simulacím můžeme s tímto modelem experimentovat tak, jako s reálným systémem a to bez rizika zničení či poškození. Můžeme se
4 tak vyvarovat chybám, které by při práci v reálném prostředí vedly třeba i k finančním škodám. V praxi je cílem pochopit jevy a chování zkoumaného reálného systému a následně je napodobit, tedy simulovat je na vlastním modelu s možností nalézt způsob, jak ovlivnit chování reálného systému požadovaným způsobem, např. pomocí jeho vnitřních stavů. Je zde snaha nejprve o formální popis, následně matematický popis reálného systému a v neposlední řadě také simulace prováděné na modelu v reálném čase, např. na počítači Základní pojmy Proto, abychom si mohli lépe vysvětlit pojmy modelování a simulace, však potřebujeme znát některé základní pojmy, bez kterých se neobejdeme. Již několikrát byl zmíněn výraz systém. Systém je množina prvků či objektů, které společně s vazbami mezi nimi vytvářejí funkční celek, který vykazuje určité chování. Každý systém má interakce s okolím. Tyto si můžeme vysvětlit jako vstupní a výstupní veličiny, případně jako podněty na systém a následné odezvy systému. Obrázek 1 - Systém Vstupní veličina je nezávisle proměnná veličina, kdy jde o působení okolí na systém, veličina má deterministický charakter a vyvolává odezvu systému (z hlediska řízení jde o akční veličinu u(t) působící na systém). Výstupní veličina je závisle proměnná veličina, která reprezentuje odezvu systému, kdy systém působí na okolí (z hlediska řízení jde o regulovanou veličinu y(t)). Počáteční podmínky tyto je možno definovat u každého systému a vyjadřují hodnoty dynamických veličin (výstupních, případně vnitřních veličin) na počátku působení vstupní veličiny tedy v čase t = 0. Poruchové veličiny reprezentují vliv okolního prostředí na systém a mají náhodný nebo neočekávaný charakter. 2
5 2. Význam, účel a výhody uplatnění simulačních modelů Problematika modelování a simulace na počítačích je důležitá nejen pro oblast automatického řízení, respektive automatické regulace, ale její význam je značně širší a uplatňuje se nejen v technických oborech, ale i v oblastech netechnických (např. životní prostředí, biologie, atd.) Simulační, modely realizované na počítači jsou nezbytným prostředkem, jak v oblasti vědeckého výzkumu, tak i ve výrobní sféře, kde se uplatňují nejen v přípravě výroby při projektování investičně náročných zařízení a technologií, ale i v jejich přímém řízení. Uplatnění nachází modelování a simulace i ve vzdělávacím procesu, v adaptivních a samoučících se systémech. Doplnění počítačové simulace o grafickou animaci, z ní vytváří mocný komunikační prostředek pro inženýry, operátory a management. Počítačové modelování a následná simulace jednotlivých variant řešení je základem a současně nejefektivnějším prostředkem pro studium (analýzu) složitých dynamických systémů a jejich procesů, ale také pro syntézu řídicích systémů technologických procesů. Optimální řízení výroby, respektive technologického procesu, se tak může opírat o simulační modely umožňující i predikci vývoje stavů a procesů v jednotlivých variantách. Z hlediska praktické použitelnosti a obecnosti je složité, až téměř nemožné matematickým modelem vyjádřit dynamické vlastnosti reálných systémů se všemi vazbami a interakcemi. Proto se zavádí tzv. zjednodušující předpoklady, které umožní vytvořit zjednodušený fyzikální model. Reálný systém je tak nahrazen zjednodušeným fyzikálním modelem a výsledný matematický model se odvodí z fyzikálních zákonů aplikovaných na tento fyzikální model. Druhým způsobem, jak získat matematický model reálného systému, je využití metod experimentální identifikace na základě měření vstupů a výstupů zkoumaného dynamického systému. Modelování a simulace na počítačích nachází uplatnění v těchto oblastech: a) Analýza složitých procesů a vývoje jejich stavů (predikce vývoje procesů), které jsou charakterizovány vlastnostmi: - velká rozsáhlost systému; - neúplnost požadovaných informací; - nejen kvantitativní, ale i kvalitativní charakter parametru; - velká dynamičnost probíhajících procesů; - složitý charakter vztahů mezi jednotlivými prvky systémů. Může jít například o modelování chování skupiny obyvatel tedy o systémy humanitního zaměření, či o modely počasí. Lze sem také zařadit například modelování krajiny formou virtuální reality, či modelování chování hladiny jezera pro predikci její změny vlivem změny klimatu. b) Syntéza řídicích systémů jedná se o návrh struktury řídicích systémů na základě požadavků na dosažení určitého chování. Může jít například o složité logické systémy či systémy regulačního charakteru. c) Optimalizace procesů jde např. o modelování změny a úpravy parametrů systému pro možnost zlepšení konečných výsledků technologického procesu. Například 3
6 optimalizace časového průběhu technologického procesu prostřednictvím zjištění kritické cesty metodou CPM či PERT za pomocí nástroje MS Project či OCOW. d) Řízení technologických procesů a výroby e) Řízení kvality produkce f) Testování nových technologických metod g) Projektování strojních a technologických zařízení Základní princip: Chování reálného systému bez možnosti jeho poškození lze nepřímo studovat prostřednictvím simulačního modelu daného systému na základě jeho podobnosti. Poznatky o chování simulačního modelu lze pokládat za hypotézy o charakteru chování originálního, tedy reálného systému. Tyto hypotézy se v rámci simulačního procesu ověřují a dále korigují (upravují). Je nutné si však uvědomit, že součástí tvorby modelu jsou i zjednodušující předpoklady, hypotézy a různá omezení, která je nutno upravovat v případě nesouladu validity, tedy neplatnosti modelu. Definici modelu lze tedy specifikovat takto: Modelem se nazývá účelově definovaný systém na základě podobnosti dvou systémů, který umožňuje, nebo usnadňuje řešení úlohy definované na originálu. Podle vzájemné podobnosti originálního systému a jeho modelu se tyto dva systémy klasifikují jako podobné si ve struktuře a v chování. Dva systémy jsou si podobné ve struktuře, jestliže každému prvku jednoho systému lze jednoznačně přiřadit prvek druhého systému a současně každému vztahu mezi prvky jednoho systému je jednoznačně přiřazen vztah mezi odpovídajícími prvky systému druhého. Takovéto dva systémy se nazývají homomorfní. Pokud toto platí i při vzájemné záměně systémů, pak jsou tyto systémy izomorfní. Dva systémy jsou si podobné v chování, jestliže podněty na jejich vstupu vyvolávají u obou systémů stejné reakce (odezvy) na výstupu. Dva systémy, které jsou si podobny ve struktuře, jsou si rovněž podobny v chování, ale neplatí to naopak. Zjednodušeně lze tedy říci, že místo toho, abychom sledovali dynamické chování nějakého procesu, který nás zajímá (reálného objektu), a jeho reakce na provedené změny (ať už organizační či technické), sledujeme chování jeho modelu. S modelem souvisí i pojem simulace. Provedeme-li nějaké řízené pozorování na reálném objektu, pak hovoříme o provedení experimentu. Provedeme-li obdobné řízené pozorování na modelu reálného objektu, pak již hovoříme o simulaci. Tedy simulace je specifický proces pozorování, kdy je zkoumaný systém nahrazen modelem a s tímto jsou prováděny experimenty za účelem získání informací o původním zkoumaném systému. 4
7 Simulace na modelu reálného objektu provádíme proto, že se často s modelem pracuje snadněji než s originálem, experimentování s modelem je méně nákladné, nebo i méně nebezpečné. Příklad: Při výcviku řidičů v autoškole se často nejprve používá silniční trenažér, který je schopen simulovat chování dopravního prostředku. Důvodem je zajištění bezpečnosti v simulovaných situacích, kdy provádění výuky daných situací v reálném provozu a v reálném vozidle (originálu) by bylo nebezpečné a rovněž nákladné. Mezi výhody použití simulačních modelů patří: Možnost experimentování s modelem experimenty s reálným systémem (originálem) mohou být nákladné, nebo i nebezpečné či nemožné; možnost komplexního studia problému (systému) z důvodu systémového přístupu tvorby simulačního modelu; možnost studia systému v reálném, zpomaleném, či případně zrychleném čase; možnost studia modelovaného systému i z hlediska potřebných detailů; možnost posouzení stanovených hypotéz a výběr optimální varianty; možnost nepřímého měření hodnot a identifikace; predikce vývoje stavů reálného systému; znalost vlastností zaváděných výrobků, či technologií ještě před jejich první aplikací. Identifikaci lze definovat jako proces ztotožňování poznatků o zkoumaném systému (analyzovaném objektu) se skutečností. Cílem a výsledkem procesu identifikace je matematický model, který reprezentuje dynamické chování zkoumaného systému. Jinak řečeno Identifikace je určení systému z dané třídy systémů, ke kterému je testovaný systém (analyzovaný objekt - originál), na základě vstupů a výstupů, ekvivalentní tedy odpovídající. Z hlediska identifikace systému je výhodná simulace i v případech, kdy je sice známá struktura systému, a tedy i soustava rovnic, ale často není známo jejich analytické řešení, nebo nejsou známy konkrétní hodnoty konstant a parametrů. 5
 Vydělení objektu simulace a definice problému 2) Syntéza simulačního modelu 3) Verifikace validity počítačového modelu 4) Simulace v užším slova smyslu 5) Aplikace získaných poznatků")
8 3. Simulační proces Obrázek 2 - Simulační proces Simulační proces je možné rozdělit do pěti základních fází, které na sebe vzájemně navazují. Jsou jimi: 1) Vydělení objektu simulace a definice problému 2) Syntéza simulačního modelu 3) Verifikace validity počítačového modelu 4) Simulace v užším slova smyslu 5) Aplikace získaných poznatků Ad1) Tato fáze vychází z hrubé dekompozice systému a zahrnuje rozpoznání existence problému a vytýčení cílů. Formulace problému není vždy jednorázová činnost, ale neustále se v průběhu dalších fází zpřesňuje a vyjasňuje. Formulace problému zahrnuje i stanovení 6
9 základních a stěžejních hypotéz, které by měly být samotnou simulací potvrzeny nebo vyvráceny. Ad2) Fáze syntézy simulačního modelu zahrnuje několik dílčích kroků: a) Analýzu tím je myšlena analýza problému, analýza cílů, struktury a chování systému v čase. Provedení důkladné analýzy je nutnou podmínkou správného řešení simulačního modelu. b) Sběr dat a informací o modelovaném systému při tomto kroku vycházíme z dostupných informací o realitě (např. literatura, technické zápisy, manuály, výrobní informace, případně konzultace s odborníky). Mnohdy však nejsme schopni tyto informace získat jinak, než provedením experimentů a experimentálních měření. Mnohdy je možné tuto fázi zahrnout pod samotnou analýzu. c) Formulace předpokladů a hypotéz při řešení simulační úlohy mohou být stanoveny některé zjednodušující předpoklady a hypotézy pro případ, kdy například neexistují dostupné informace o zkoumaném problému, anebo rovněž pro jeho složitost. Musí však dojít k ověření zda toto nemá podstatný vliv na konečné řešení při respektování výchozích hypotéz a cílů. d) Tvorba matematického modelu tento krok vyžaduje široké znalosti z oblasti matematiky, statistiky, fyziky, chemie a jiných oborů, které jsou provázány se zkoumaným systémem. Je totiž nutné specifikovat matematické, fyzikální a jiné zákonitosti, které se účastní dynamických projevů ve zkoumaném systému. Zároveň je nutné specifikovat všechny proměnné, konstanty a parametry včetně jejich označení, popisu, rozměru, jednotky a definičního oboru. Matematický model se formuluje buď analytickým způsobem (s využitím metody postupného vytváření relací) nebo experimentálně (pomocí metod experimentální identifikace). Experimentální identifikace se používá v případech, kdy složitost systému je příliš velká a překračuje možnosti analytického přístupu, nebo nejsme schopni rozpoznat strukturu systému. e) Tvorba teoretického počítačového modelu mnohdy nazývaného abstraktní počítačový model jde o obecný program výpočtu, který může být reprezentován například formou vývojového diagramu, obecné počítačové sítě apod. f) Realizace počítačového modelu v simulačním prostředku jde o implementaci simulačního modelu na konkrétním počítači na základě teoretického počítačového modelu. Ad3) Fáze verifikace modelu náleží mezi nejobtížnější fáze a to proto, že je potřeba ověřit, zda při nastavení stejných parametrů jak na modelu tak dříve na systému, je následně model schopen dosáhnout shodných výsledků. Je-li to tedy možné, aplikuje se tzv. historie reálného objektu na modelu a následně se hodnotí, jak dobře model kopíruje minulé chování modelovaného systému. 7
 Návrh a plánování experimentů, kdy je nutné stanovit - výběr počátečních hodnot parametrů modelu - výběr")
10 Obrázek 3 - Verifikace modelu Zdroj: VÁCLAVEK, P. Modelování a simulace, Ad4) Fáze simulace v užším slova smyslu spočívá v samotném experimentování se simulačním modelem přímo na počítači. I tato fáze by měla mít pevně stanovaný řád a je určena následujícími čtyřmi kroky: 1) Návrh a plánování experimentů, kdy je nutné stanovit - výběr počátečních hodnot parametrů modelu - výběr intervalu změn parametrů - určení počtu úrovní experimentů - určení faktorů z hlediska poznatelnosti a řiditelnosti modelu, přesnosti experimentu a ovlivňování cílové funkce 2) Opakování řešení simulační úlohy 3) Srovnání výsledků simulace provádíme srovnání očekávaného chování simulačního modelu s jeho skutečným chováním. Podle určitých zvolených kritérií může na základě výsledků simulace dojít k úpravám (korigování) parametrů modelu. Je potřeba dosáhnout určité míry platnosti modelu vzhledem k chování reálného systému. 4) Vyhodnocení simulačního modelu Všechny výše uvedené fáze lze spatřovat ve zjednodušené formě na následujícím obrázku níže. 8
11 Analýza: Obrázek 4 - Zjednodušená forma simulačního procesu - Specifikace dějů probíhajících v procesu - Vymezení působících vlivů - Určení veličin popisujících proces - Rozhodnutí o zapojení jednotlivých prvků do modelu - Zavedení zjednodušujících předpokladů Některé zjednodušující předpoklady: - Rozdělení systému na jednodušší subsystémy - Zavádění neexistujících forem (ideální plyn apod.) - Předpoklad nezávislostí (např. zanedbání závislosti látek na teplotě tepelná roztažnost) - Zanedbání ztrát - Linearizace nelineárních závislostí - Použití empiricky zjištěných vztahů a závislostí Teoretický model (ne Teoretický počítačový model) - Je přehledný a jednoduchý, vyjadřuje stručně princip funkce a základní parametry - Umožňuje snazší řešení matematického modelu (výsledných rovnic) - Nepopisuje zcela přesně skutečnost Obrázek 5 - Příklady teoretického modelu 9
12 Tvorba matematického modelu Využíváme matematické rovnice vyjadřující známé zákony a vztahy (fyzikální, fyzikálně chemické a chemické). Postupujeme ve třech krocích: 1) výběr matematického popisu zákonitostí 2) vytvoření modelových rovnic (včetně doplnění zjednodušení) 3) určení podmínek řešení (počáteční a okrajové podmínky) Volba simulačního programu Postupujeme ve třech krocích: 1) volba metody řešení modelových rovnic 2) zpracování modelových rovnic 3) sestavení výpočetního programu Realizace simulačního modelu Výsledkem je vytvoření počítačového modelu použitelného v praxi. Je potřeba provést následující kroky: 1) Identifikaci modelu - nalezení neznámých parametrů 2) Verifikaci modelu - kontrola správnosti modelu Příklad 1: Je třeba analyticky popsat a simulačně ověřit proces hromadění (akumulaci, skladování) materiálu na skládce. Analýza systému a teoretický model: m(t) [kg] celkové množství materiálu na skládce q 1 (t) [kg*s -1 ] dovážené množství q 2 (t) [kg*s -1 ] odvážené množství Výběr matematického popisu zákonitostí: Bilanční rovnice: dm t) q ( t) dt q ( t) dt ( 1 2 Vytvoření modelových rovnic dm( t) Úpravou získáme lineární diferenciální rovnici: q1( t) q2( t) dt Určení podmínek řešení Počáteční podmínka říká, že množství na skládce nemůže být záporné, a že na počátku již m( 0) m 0 nějaké množství na skládce bylo 0 Integrací vztahu při uvažování počátečních podmínek získáme: t m( t) q q d m
13 4. Matematické modely Matematické modely se používají především v přírodních vědách a inženýrských disciplínách, jako jsou fyzika, biologie či elektrotechnika. Jako další oblasti využití matematických modelů lze uvést například oblast sociálních věd (ekonomie, sociologie a politické vědy). Nejčastěji však matematické modely využívají fyzici, inženýři, informatici a ekonomové. V teorii formalizace a modelování je originální systém pro řešení nahrazen matematickým modelem a pro účely experimentování pak simulačním modelem realizovaným na počítači. Matematický model je soubor matematicko-logických vztahů vyjádřených rovnicemi, nerovnostmi, nebo i blokovými schématy, vývojovými diagramy, grafy či tabulkami, pro popis dynamického stavu systému. Kromě soustavy rovnic, musí matematický model obsahovat i definiční obor proměnných a cílovou funkci, pro kterou je vytvořen. Jde tedy zjednodušeně o matematický zápis, který slouží k popisu chování originálního systému. Obrázek 6 - Příklad vyjádření matematických modelů Obecně lze matematický model popsat jako vyjádření vztahu mezi vektory veličin vstupních X(t), stavových Q(t) a výstupních Y(t). ( ) [ ( ) ( )], kde T je vektor transformace funkční závislost. Matematický model systému je vytvářen na základě určité rozlišovací úrovně určené potřebami podrobnosti zkoumání a cílovou funkcí, pro kterou je výsledný model určen. Je vhodné, aby výsledný model byl co do složitosti a robustnosti úměrný potřebám popisu predikce chování zkoumaného systému, požadavkům na kvalitu výstupních dat a výkonu použitého hardware Klasifikace matematických modelů Při modelování je vždy vhodné jasně určit, do které skupiny námi hledaný/vytvářený model spadá. Toto určení provádíme již při analýze a docílíme tím lepšího a snadnějšího pochopení vlastností a struktury původního systému. 11
14 Matematické modely můžeme klasifikovat několika způsoby, např. na: Deterministické a Stochastické podle toho, zda do modelu zahrnujeme náhodné veličiny; Lineární a Nelineární podle toho, zda jsou funkce, podmínky a omezení reprezentované lineárními rovnicemi, a nebo je zde možnost, že se může vyskytnout alespoň jedna podmínka, nebo omezení popsané formou nelineární rovnice Statické a Dynamické podle vztahu k průběhu času Spojité a Diskrétní ve vztahu ke spojitosti Modely statické - model zobrazuje a analyzuje systém bez zřetele k jeho časovému vývoji. Zobrazení se týká zpravidla určitého časového intervalu (týden, měsíc, rok, apod.). Modely dynamické - model zobrazuje a analyzuje systém v průběhu času. Zobrazení může být typu ex post nebo ex ante a respektovat krátký či delší časový horizont. Modely deterministické - všechny proměnné, konstanty a funkce v modelu jsou deterministické (nenáhodné) veličiny nebo funkce. Deterministický model vykazuje po opakování pokusu za stejných počátečních podmínek shodné chování. Modely stochastické - alespoň jedna proměnná, konstanta nebo funkce v modelu je náhodná veličina nebo náhodná funkce a při opakování experimentu při stejných podmínkách není vždy zaručen shodný výsledek experimentu Příklad tvorby matematického modelu analytickým způsobem Jako příklad si ukážeme popis dynamického chování elektrického obvodu s jednou indukčností. Jde o jeden z nejjednodušších příkladů, na kterém lze ukázat obecné principy nalezení matematického modelu zkoumaného systému a na kterém lze následně provést i jednoduchý způsob simulace. Největší pozornost musíme věnovat teoretickým poznatkům, které jsou vázány ke zkoumanému systému. Použijeme-li hned na začátku určitou míru zjednodušení, pak můžeme předpokládat, že hovoříme o jednoduchém idealizovaném elektrický obvodu, složeném ze zdroje stejnosměrného konstantního napětí, spínače, rezistoru (odporu) a induktoru (ideální cívky). Ideální zdroj napětí je aktivní elektrotechnický prvek, na jehož svorkách najdeme za všech okolností konstantní hodnotu napětí (není to akumulátor, který se časem vybíjí, ani malý adaptér, ze kterého dostaneme proměnný průběh napětí tzv. pulzující napětí). Je to čistě ideální zdroj napětí, přičemž neuvažujeme jeho vnitřní odpor. 12
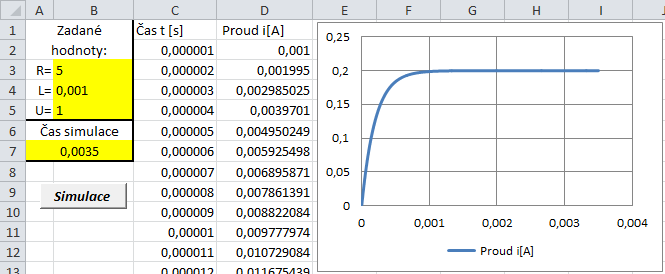
15 Rezistor je ideální pasivní elektrotechnický prvek, jehož jedinou vlastností je za všech okolností konstantní elektrický odpor. Podobně induktor je ideální elektrotechnický pasivní prvek, jehož jedinou vlastností je opět za všech okolností konstantní indukčnost. Situace je silně zidealizovaná: ideální zdroj, jehož napětí nezávisí na zatížení ani na čase, ideální rezistor a induktor, jejichž parametry se nemění s teplotou, proudem nebo působením dalších vlivů. Spínač je do obvodu zapojen z jednoduchého důvodu: existuje totiž pravidlo - fyzikální zákon, který popisuje vznik indukovaného napětí: Při průchodu elektrického proudu cívkou vzniká magnetické pole. Po sepnutí spínače se s rostoucím proudem zvětšuje magnetická indukce vznikajícího pole. Magnetické pole je tedy nestacionární a je příčinou vzniku indukovaného elektrického pole v cívce. Podle Lenzova zákona působí toto pole svými účinky proti změně, která ho vyvolala: na koncích cívky proto vzniká napětí opačné polarity, než je napětí zdroje. To způsobí, že proud nedosáhne okamžitě plné hodnoty, ale narůstá postupně až na hodnotu určenou odporem cívky a dále se již nemění. Nastává ustálený stav a indukované elektrické pole zaniká. Indukované napětí se tedy indukuje na prvku zvaném induktor a jeho velikost závisí na indukčnosti induktoru a na časové změně proudu (vyjádřeno derivací proudu podle času). Ve stejnosměrném obvodu se tedy vliv indukčnosti může projevit jen při změně velikosti proudu v obvodu. Ideální zdroj napětí a k němu připojený ideální rezistor nejsou schopny změnu proudu zajistit. Proto je do obvodu zapojen spínač, kterým je posléze připojen obvod s nulovým proudem ke zdroji konstantního napětí. Další fyzikální zákony, které zde využijeme, jsou základní zákony spojené s elektrickými obvody, tedy Ohmův a Kirchhofovy zákony. Konkrétně se jedná o druhý Kirchhofův zákon, který říká, že součet napětí v uzavřené smyčce elektrického obvodu je roven nule. Obvod v našem příkladu se skládá z právě jedné smyčky, a proto tedy platí: z toho vyplývá vzhledem k obrázku výše Uplatňujeme zde tzv. napěťovou konvenci, kdy zdroj napětí dává proud, který teče z plusové svorky zdroje obvodem ve směru k mínusové svorce (směrem ven) a na pasivních prvcích, tedy na rezistoru a induktoru, proud vyvolá úbytek napětí orientovaný ve směru protékajícího proudu. Následně uplatníme Ohmův zákon, který říká, že úbytek napětí na rezistoru je přímo úměrný proudu procházejícímu rezistorem: Na základě tří zmíněných zákonů lze následně sestavit matematický model systému popsaného na obrázku výše. Základem je napěťová rovnice dle Kirchhofova zákony, do které 13

16 dosadíme úbytky napětí na rezistoru u R a na induktoru u i, které působí proti napětí stejnosměrného zdroje U. Veličinou vstupující do systému je napětí a výstupní veličinou ze systému, tedy sledovanou veličinou, je proud procházející obvodem. Z hlediska tvorby operátorového přenosu prvku jde o diferenciální rovnici proporcionálního prvku prvního řádu: Diferenciální rovnice ( ) ( ) ( ) Obrazová rovnice ( ) ( ) ( ) Operátorový přenos ( ) ( ) ( ) Simulaci takového systému pak lze provést hned několika způsoby. Jednak prostřednictvím matematického prostředku Matlab a jeho prostředí Simulink a druhou možností je pak si tento model naprogramovat ve vhodném prostředí. Výsledek simulace naleznete na obrázku níže. Druhým způsobem simulace, který si na tomto jednoduchém příkladu vyzkoušíme, je naprogramování dané diferenciální rovnice. K tomu je však ještě nutné udělat jisté kroky úpravy na této diferenciální rovnici. Využijeme k tomu jednokrokovou numerickou metodu řešení diferenciální rovnice tzv. Eulerovu metodu. 14
 ( ) K samotnému naprogramování lze využít možností, které nabízí aplikace Microsoft Excel společně s")
17 Časovou změnu proudu na induktoru vyjádříme jako rozdíl proudů za určitý časový okamžik. Nový stav systému v čase t i+1 vždy vypočítáme na základě předcházejícího stavu systému: ( ) ( ) K samotnému naprogramování lze využít možností, které nabízí aplikace Microsoft Excel společně s doplňkem pro vývojáře Visual Basic for Application. V otevřeném sešitu lze zadat do buněk potřebné parametry simulace (odpor R, indukčnost L a napětí zdroje U), aby bylo možné je posléze měnit bez zásahu do těla programu. Pro možnost spuštění simulace je zapotřebí vložit na plochu sešitu ovládací prvek tlačítka. V prostředí Visual Basic for Application pak lze provést naprogramování procesu simulace. Nezbytná je deklarace proměnných, nastavení nulových počátečních podmínek a nastavení výpočtů do těla cyklu For. Posledním krokem je pak vytvoření grafu z hodnot simulace. Vše je na obrázcích níže. 15
18 16
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
Úvod do modelování a simulace. Ing. Michal Dorda, Ph.D.
 Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Teorie systémů TES 1. Úvod
 Evropský sociální fond. Praha & EU: Investujeme do vaší budoucnosti. Teorie systémů TES 1. Úvod ZS 2011/2012 prof. Ing. Petr Moos, CSc. Ústav informatiky a telekomunikací Fakulta dopravní ČVUT v Praze
Evropský sociální fond. Praha & EU: Investujeme do vaší budoucnosti. Teorie systémů TES 1. Úvod ZS 2011/2012 prof. Ing. Petr Moos, CSc. Ústav informatiky a telekomunikací Fakulta dopravní ČVUT v Praze
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
MODELOVÁNÍ. Základní pojmy. Obecný postup vytváření induktivních modelů. Měřicí a řídicí technika magisterské studium FTOP - přednášky ZS 2009/10
 MODELOVÁNÍ základní pojmy a postupy principy vytváření deterministických matematických modelů vybrané základní vztahy používané při vytváření matematických modelů ukázkové příklady Základní pojmy matematický
MODELOVÁNÍ základní pojmy a postupy principy vytváření deterministických matematických modelů vybrané základní vztahy používané při vytváření matematických modelů ukázkové příklady Základní pojmy matematický
Základy elektrotechniky 2 (21ZEL2) Přednáška 1
 Přednáška 1") Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
Základy elektrotechniky 2 (21ZEL2) Přednáška 1 Úvod Základy elektrotechniky 2 hodinová dotace: 2+2 (př. + cv.) zakončení: zápočet, zkouška cvičení: převážně laboratorní informace o předmětu, kontakty na
Obvodové prvky a jejich
 Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
Obvodové prvky a jejich parametry Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Elektrický obvod Uspořádaný systém elektrických prvků a vodičů sloužící
PŘECHODOVÝ JEV V RC OBVODU
 PŘEHODOVÝ JEV V OBVOD Pracovní úkoly:. Odvoďte vztah popisující časovou závislost elektrického napětí na kondenzátoru při vybíjení. 2. Měřením určete nabíjecí a vybíjecí křivku kondenzátoru. 3. rčete nabíjecí
PŘEHODOVÝ JEV V OBVOD Pracovní úkoly:. Odvoďte vztah popisující časovou závislost elektrického napětí na kondenzátoru při vybíjení. 2. Měřením určete nabíjecí a vybíjecí křivku kondenzátoru. 3. rčete nabíjecí
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
Algoritmizace diskrétních. Ing. Michal Dorda, Ph.D.
 Algoritmizace diskrétních simulačních modelů Ing. Michal Dorda, Ph.D. 1 Úvodní poznámky Při programování simulačních modelů lze hlavní dílčí problémy shrnout do následujících bodů: 1) Zachycení statických
Algoritmizace diskrétních simulačních modelů Ing. Michal Dorda, Ph.D. 1 Úvodní poznámky Při programování simulačních modelů lze hlavní dílčí problémy shrnout do následujících bodů: 1) Zachycení statických
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I
 Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
ELT1 - Přednáška č. 6
 ELT1 - Přednáška č. 6 Elektrotechnická terminologie a odborné výrazy, měřicí jednotky a činitelé, které je ovlivňují. Rozdíl potenciálů, elektromotorická síla, napětí, el. napětí, proud, odpor, vodivost,
ELT1 - Přednáška č. 6 Elektrotechnická terminologie a odborné výrazy, měřicí jednotky a činitelé, které je ovlivňují. Rozdíl potenciálů, elektromotorická síla, napětí, el. napětí, proud, odpor, vodivost,
OSA. maximalizace minimalizace 1/22
 OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
Identifikátor materiálu: VY_32_INOVACE_356
 Identifikátor materiálu: VY_32_INOVACE_356 Anotace Autor Jazyk Očekávaný výstup Výuková prezentace.na jednotlivých snímcích jsou postupně odkrývány informace, které žák zapisuje či zakresluje do sešitu.
Identifikátor materiálu: VY_32_INOVACE_356 Anotace Autor Jazyk Očekávaný výstup Výuková prezentace.na jednotlivých snímcích jsou postupně odkrývány informace, které žák zapisuje či zakresluje do sešitu.
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VII. SYSTÉMY ZÁKLADNÍ POJMY SYSTÉM - DEFINICE SYSTÉM (řec.) složené, seskupené (v
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VII. SYSTÉMY ZÁKLADNÍ POJMY SYSTÉM - DEFINICE SYSTÉM (řec.) složené, seskupené (v
01 Teoretické disciplíny systémové vědy
 01 Teoretické disciplíny systémové vědy (systémový přístup, obecná teorie systému, systémová statika a dynamika, úlohy na statických a dynamických systémech, kybernetika) Systémová věda je vědní disciplínou
01 Teoretické disciplíny systémové vědy (systémový přístup, obecná teorie systému, systémová statika a dynamika, úlohy na statických a dynamických systémech, kybernetika) Systémová věda je vědní disciplínou
Integrovaná střední škola, Sokolnice 496
 Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Název projektu: Moderní škola Integrovaná střední škola, Sokolnice 496 Registrační číslo: CZ.1.07/1.5.00/34.0467 Název klíčové aktivity: V/2 - Inovace a zkvalitnění výuky směřující k rozvoji odborných
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
APLIKACE SIMULAČNÍHO PROGRAMU ANSYS PRO VÝUKU MIKROELEKTROTECHNICKÝCH TECHNOLOGIÍ
 APLIKACE SIMULAČNÍHO PROGRAMU ANSYS PRO VÝUKU MIKROELEKTROTECHNICKÝCH TECHNOLOGIÍ 1. ÚVOD Ing. Psota Boleslav, Doc. Ing. Ivan Szendiuch, CSc. Ústav mikroelektroniky, FEKT VUT v Brně, Technická 10, 602
APLIKACE SIMULAČNÍHO PROGRAMU ANSYS PRO VÝUKU MIKROELEKTROTECHNICKÝCH TECHNOLOGIÍ 1. ÚVOD Ing. Psota Boleslav, Doc. Ing. Ivan Szendiuch, CSc. Ústav mikroelektroniky, FEKT VUT v Brně, Technická 10, 602
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Fyzikální veličiny. - Obecně - Fyzikální veličiny - Zápis fyzikální veličiny - Rozměr fyzikální veličiny. Obecně
 Fyzikální veličiny - Obecně - Fyzikální veličiny - Zápis fyzikální veličiny - Rozměr fyzikální veličiny Obecně Fyzika zkoumá objektivní realitu - hmotu - z určité stránky. Zabývá se její látkovou formou
Fyzikální veličiny - Obecně - Fyzikální veličiny - Zápis fyzikální veličiny - Rozměr fyzikální veličiny Obecně Fyzika zkoumá objektivní realitu - hmotu - z určité stránky. Zabývá se její látkovou formou
Nejjednodušší, tzv. bang-bang regulace
 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
D C A C. Otázka 1. Kolik z následujících matic je singulární? A. 0 B. 1 C. 2 D. 3
 atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
NESTACIONÁRNÍ MAGNETICKÉ POLE POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Masarykovo gymnázium Vsetín Autor: Mgr. Jitka Novosadová DUM: MGV_F_SS_3S3_D16_Z_OPAK_E_Nestacionarni_magneticke_pole_T Vzdělávací obor: Člověk a příroda Fyzika Tematický okruh: Nestacionární magnetické
Škola: Masarykovo gymnázium Vsetín Autor: Mgr. Jitka Novosadová DUM: MGV_F_SS_3S3_D16_Z_OPAK_E_Nestacionarni_magneticke_pole_T Vzdělávací obor: Člověk a příroda Fyzika Tematický okruh: Nestacionární magnetické
NESTABILITY VYBRANÝCH SYSTÉMŮ. Úvod. Vzpěr prutu. Petr Frantík 1
 NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
PŘÍKLAD PŘECHODNÝ DĚJ DRUHÉHO ŘÁDU ŘEŠENÍ V ČASOVÉ OBLASTI A S VYUŽITÍM OPERÁTOROVÉ ANALÝZY
 PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004.
 Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
7. Rozdělení pravděpodobnosti ve statistice
 7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
Základní vztahy v elektrických
 Základní vztahy v elektrických obvodech Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Klasifikace elektrických obvodů analogové číslicové lineární
Základní vztahy v elektrických obvodech Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Klasifikace elektrických obvodů analogové číslicové lineární
Účinky elektrického proudu. vzorová úloha (SŠ)
") Účinky elektrického proudu vzorová úloha (SŠ) Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud jako
Účinky elektrického proudu vzorová úloha (SŠ) Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud jako
Pracovní list žáka (ZŠ)
") Pracovní list žáka (ZŠ) Účinky elektrického proudu Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud
Pracovní list žáka (ZŠ) Účinky elektrického proudu Jméno Třída.. Datum.. 1. Teoretický úvod Elektrický proud jako jev je tvořen uspořádaným pohybem volných částic s elektrickým nábojem. Elektrický proud
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
EXPERIMENTÁLNÍ MECHANIKA 1. Jan Krystek
 EXPERIMENTÁLNÍ MECHANIKA 1 2. přednáška Jan Krystek 27. září 2017 ZÁKLADY TEORIE EXPERIMENTU EXPERIMENT soustava cílevědomě řízených činností s určitou posloupností CÍL EXPERIMENTU získání objektivních
EXPERIMENTÁLNÍ MECHANIKA 1 2. přednáška Jan Krystek 27. září 2017 ZÁKLADY TEORIE EXPERIMENTU EXPERIMENT soustava cílevědomě řízených činností s určitou posloupností CÍL EXPERIMENTU získání objektivních
Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky v Brně
 Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Rezistor je součástka kmitočtově nezávislá, to znamená, že se chová stejně v obvodu AC i DC proudu (platí pro ideální rezistor).
.") Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
Rezistor: Pasivní elektrotechnická součástka, jejíž hlavní vlastností je schopnost bránit průchodu elektrickému proudu. Tuto vlastnost nazýváme elektrický odpor. Do obvodu se zařazuje za účelem snížení
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB D24FZS
 OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
Inženýrská statistika pak představuje soubor postupů a aplikací teoretických principů v oblasti inženýrské činnosti.
 Přednáška č. 1 Úvod do statistiky a počtu pravděpodobnosti Statistika Statistika je věda a postup jak rozvíjet lidské znalosti použitím empirických dat. Je založena na matematické statistice, která je
Přednáška č. 1 Úvod do statistiky a počtu pravděpodobnosti Statistika Statistika je věda a postup jak rozvíjet lidské znalosti použitím empirických dat. Je založena na matematické statistice, která je
Modelování elektromechanického systému
 Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
PŘECHODOVÝ DĚJ VE STEJNOSMĚRNÉM EL. OBVODU zapnutí a vypnutí sériového RC členu ke zdroji stejnosměrného napětí
 Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB -TU Ostrava PŘEHODOVÝ DĚJ VE STEJNOSMĚNÉM EL. OBVODU zapnutí a vypnutí sériového členu ke zdroji stejnosměrného napětí Návod do
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB -TU Ostrava PŘEHODOVÝ DĚJ VE STEJNOSMĚNÉM EL. OBVODU zapnutí a vypnutí sériového členu ke zdroji stejnosměrného napětí Návod do
CHEMICKO-INŽENÝRSKÉ VZDĚLÁVÁNÍ VE STRUKTUROVANÉM STUDIU
 CHEMICKO-INŽENÝRSKÉ VZDĚLÁVÁNÍ VE STRUKTUROVANÉM STUDIU Milan Jahoda Zdroj Peter Hamersma, Martin Molzahn, Eric Schaer: Recommendations for Chemical Engineering Education in a Bologna Three Cycle Degree
CHEMICKO-INŽENÝRSKÉ VZDĚLÁVÁNÍ VE STRUKTUROVANÉM STUDIU Milan Jahoda Zdroj Peter Hamersma, Martin Molzahn, Eric Schaer: Recommendations for Chemical Engineering Education in a Bologna Three Cycle Degree
Fázorové diagramy pro ideální rezistor, skutečná cívka, ideální cívka, skutečný kondenzátor, ideální kondenzátor.
 FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických
FREKVENČNĚ ZÁVISLÉ OBVODY Základní pojmy: IMPEDANCE Z (Ω)- charakterizuje vlastnosti prvku pro střídavý proud. Impedance je základní vlastností, kterou potřebujeme znát pro analýzu střídavých elektrických
Pojetí vyučovacího předmětu
 Učební osnova předmětu ZÁKLADY ELEKTROTECHNIKY studijního oboru 26-41-M/01 ELEKTROTECHNIKA Pojetí vyučovacího předmětu Učivo vyučovacího předmětu základy elektrotechniky poskytuje žákům na přiměřené úrovni
Učební osnova předmětu ZÁKLADY ELEKTROTECHNIKY studijního oboru 26-41-M/01 ELEKTROTECHNIKA Pojetí vyučovacího předmětu Učivo vyučovacího předmětu základy elektrotechniky poskytuje žákům na přiměřené úrovni
4EK311 Operační výzkum. 1. Úvod do operačního výzkumu
 4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
časovém horizontu na rozdíl od experimentu lépe odhalit chybné poznání reality.
 Modelování dynamických systémů Matematické modelování dynamických systémů se využívá v různých oborech přírodních, technických, ekonomických a sociálních věd. Použití matematického modelu umožňuje popsat
Modelování dynamických systémů Matematické modelování dynamických systémů se využívá v různých oborech přírodních, technických, ekonomických a sociálních věd. Použití matematického modelu umožňuje popsat
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
ZÁKLADY ELEKTROTECHNIKY pro OPT
 ZÁKLADY ELEKTROTECHNIKY pro OPT Přednáška Rozsah předmětu: 24+24 z, zk 1 Literatura: [1] Uhlíř a kol.: Elektrické obvody a elektronika, FS ČVUT, 2007 [2] Pokorný a kol.: Elektrotechnika I., TF ČZU, 2003
ZÁKLADY ELEKTROTECHNIKY pro OPT Přednáška Rozsah předmětu: 24+24 z, zk 1 Literatura: [1] Uhlíř a kol.: Elektrické obvody a elektronika, FS ČVUT, 2007 [2] Pokorný a kol.: Elektrotechnika I., TF ČZU, 2003
CVIČENÍ 4 Doc.Ing.Kateřina Hyniová, CSc. Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze 4.
 CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
Přehled veličin elektrických obvodů
 Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
Přehled veličin elektrických obvodů Ing. Martin Černík, Ph.D Projekt ESF CZ.1.7/2.2./28.5 Modernizace didaktických metod a inovace. Elektrický náboj - základní vlastnost některých elementárních částic
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
Obsah PŘEDMLUVA 11 ÚVOD 13 1 Základní pojmy a zákony teorie elektromagnetického pole 23
 Obsah PŘEDMLUVA... 11 ÚVOD... 13 0.1. Jak teoreticky řešíme elektrotechnické projekty...13 0.2. Dvojí význam pojmu pole...16 0.3. Elektromagnetické pole a technické projekty...20 1. Základní pojmy a zákony
Obsah PŘEDMLUVA... 11 ÚVOD... 13 0.1. Jak teoreticky řešíme elektrotechnické projekty...13 0.2. Dvojí význam pojmu pole...16 0.3. Elektromagnetické pole a technické projekty...20 1. Základní pojmy a zákony
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Numerické řešení diferenciálních rovnic
 Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
Numerické řešení diferenciálních rovnic Omezení: obyčejné (nikoli parciální) diferenciální rovnice, Cauchyho počáteční úloha, pouze jedna diferenciální rovnice 1. řádu 1/1 Numerické řešení diferenciálních
1.3 Prezentace vlastní přednášky. v Power-Pointu
 Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie 1.3 Prezentace vlastní přednášky v Power-Pointu Ing. Jiří PLISKA I & C energo, a.s. V Římově 20. 1. 2013 OBSAH 1. Šablona...
Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie 1.3 Prezentace vlastní přednášky v Power-Pointu Ing. Jiří PLISKA I & C energo, a.s. V Římově 20. 1. 2013 OBSAH 1. Šablona...
Otázky ke státní závěrečné zkoušce
 Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
POČÍTAČOVÁ SIMULACE PODNIKOVÝCH PROCESŮ. Ing. V. Glombíková, PhD.
 POČÍTAČOVÁ SIMULACE PODNIKOVÝCH PROCESŮ Ing. V. Glombíková, PhD. SIMULACE nástroj pro studium chování objektů reálného světa SYSTÉM určitým způsobem uspořádána množina komponent a relací mezi nimi. zjednodušený,
POČÍTAČOVÁ SIMULACE PODNIKOVÝCH PROCESŮ Ing. V. Glombíková, PhD. SIMULACE nástroj pro studium chování objektů reálného světa SYSTÉM určitým způsobem uspořádána množina komponent a relací mezi nimi. zjednodušený,
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 Teorie měření a regulace Praxe názvy 1. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. OBECNÝ ÚVOD - praxe Elektrotechnická měření mohou probíhat pouze při
Ústav technologie, mechanizace a řízení staveb CW01 Teorie měření a regulace Praxe názvy 1. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. OBECNÝ ÚVOD - praxe Elektrotechnická měření mohou probíhat pouze při
T- MaR. Ústav technologie, mechanizace a řízení staveb. Teorie měření a regulace. Podmínky názvy. 1.c-pod. ZS 2015/ Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Podmínky názvy 1.c-pod. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. MĚŘENÍ praktická část OBECNÝ ÚVOD Veškerá měření mohou probíhat
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Podmínky názvy 1.c-pod. ZS 2015/2016 2015 - Ing. Václav Rada, CSc. MĚŘENÍ praktická část OBECNÝ ÚVOD Veškerá měření mohou probíhat
MODELY ŘÍZENÍ ZÁSOB nákladově orientované modely poptávka pořizovací lhůta dodávky předstih objednávky deterministické stochastické
 MODELY ŘÍZENÍ ZÁSOB Význam zásob spočívá především v tom, že - vyrovnávají časový nebo prostorový nesoulad mezi výrobou a spotřebou - zajišťují plynulou výrobu nebo plynulé dodávky zboží i při nepředvídaných
MODELY ŘÍZENÍ ZÁSOB Význam zásob spočívá především v tom, že - vyrovnávají časový nebo prostorový nesoulad mezi výrobou a spotřebou - zajišťují plynulou výrobu nebo plynulé dodávky zboží i při nepředvídaných
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
PowerOPTI Řízení účinnosti tepelného cyklu
 PowerOPTI Řízení účinnosti tepelného cyklu VIZE Zvýšit konkurenceschopnost provozovatelů elektráren a tepláren. Základní funkce: Spolehlivé hodnocení a řízení účinnosti tepelného cyklu, včasná diagnostika
PowerOPTI Řízení účinnosti tepelného cyklu VIZE Zvýšit konkurenceschopnost provozovatelů elektráren a tepláren. Základní funkce: Spolehlivé hodnocení a řízení účinnosti tepelného cyklu, včasná diagnostika
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
SIMULACE SPOLEHLIVOSTI SYSTÉMŮ HROMADNÉ OBSLUHY. Michal Dorda. VŠB - TU Ostrava, Fakulta strojní, Institut dopravy
 SIMULACE SPOLEHLIVOSTI SYSTÉMŮ HROMADNÉ OBSLUHY Michal Dorda VŠB - TU Ostrava Fakulta strojní Institut dopravy 1 Úvod V běžné technické praxi se velice často setkáváme s tzv. systémy hromadné obsluhy aniž
SIMULACE SPOLEHLIVOSTI SYSTÉMŮ HROMADNÉ OBSLUHY Michal Dorda VŠB - TU Ostrava Fakulta strojní Institut dopravy 1 Úvod V běžné technické praxi se velice často setkáváme s tzv. systémy hromadné obsluhy aniž
12. Elektrotechnika 1 Stejnosměrné obvody Kirchhoffovy zákony
 . Elektrotechnika Stejnosměrné obvody Kirchhoffovy zákony . Elektrotechnika Kirchhoffovy zákony Při řešení elektrických obvodů, tedy různě propojených sítí tvořených zdroji, odpory (kapacitami a indukčnostmi)
. Elektrotechnika Stejnosměrné obvody Kirchhoffovy zákony . Elektrotechnika Kirchhoffovy zákony Při řešení elektrických obvodů, tedy různě propojených sítí tvořených zdroji, odpory (kapacitami a indukčnostmi)
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
P R O J E K T O V É Ř Í Z E N Í A M A R K E T I N G 1. Akad. rok 2015/2016, LS Projektové řízení a marketing - VŽ 1
 P R O J E K T O V É Ř Í Z E N Í A M A R K E T I N G 1 Akad. rok 2015/2016, LS Projektové řízení a marketing - VŽ 1 Vznik a historie projektového řízení Akad. rok 2015/2016, LS Projektové řízení a marketing
P R O J E K T O V É Ř Í Z E N Í A M A R K E T I N G 1 Akad. rok 2015/2016, LS Projektové řízení a marketing - VŽ 1 Vznik a historie projektového řízení Akad. rok 2015/2016, LS Projektové řízení a marketing
Vývoj vědeckého myšlení
 Vývoj vědeckého myšlení Systémovost logistického řešení je spjata se schopností řešit komplexy navzájem souvisejících úkolů. V rámci vývoje vědeckého myšlení uvádí americký autor Waren Weaver tři vývojová
Vývoj vědeckého myšlení Systémovost logistického řešení je spjata se schopností řešit komplexy navzájem souvisejících úkolů. V rámci vývoje vědeckého myšlení uvádí americký autor Waren Weaver tři vývojová
Toroidní generátor. Ing. Ladislav Kopecký, červenec 2017
 1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je
1 Toroidní generátor Ing. Ladislav Kopecký, červenec 2017 Běžné generátory lze zpravidla použít i jako motory a naopak. To je důvod, proč u nich nelze dosáhnout účinnosti přesahující 100%. Příčinou je
Kapitola 1. Signály a systémy. 1.1 Klasifikace signálů
 Kapitola 1 Signály a systémy 1.1 Klasifikace signálů Signál představuje fyzikální vyjádření informace, obvykle ve formě okamžitých hodnot určité fyzikální veličiny, která je funkcí jedné nebo více nezávisle
Kapitola 1 Signály a systémy 1.1 Klasifikace signálů Signál představuje fyzikální vyjádření informace, obvykle ve formě okamžitých hodnot určité fyzikální veličiny, která je funkcí jedné nebo více nezávisle
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Gymnázium, Český Krumlov
 Gymnázium, Český Krumlov Vyučovací předmět Fyzika Třída: 6.A - Prima (ročník 1.O) Úvod do předmětu FYZIKA Jan Kučera, 2011 1 Organizační záležitosti výuky Pomůcky související s výukou: Pracovní sešit (formát
Gymnázium, Český Krumlov Vyučovací předmět Fyzika Třída: 6.A - Prima (ročník 1.O) Úvod do předmětu FYZIKA Jan Kučera, 2011 1 Organizační záležitosti výuky Pomůcky související s výukou: Pracovní sešit (formát
Diferenciální rovnice 3
 Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Regulační obvod s měřením akční veličiny
 Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Spojité regulátory Zhotoveno ve školním roce: 2011/2012. Spojité regulátory. Jednoduché regulátory
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
EKONOMETRIE 7. přednáška Fáze ekonometrické analýzy
 EKONOMETRIE 7. přednáška Fáze ekonometrické analýzy Ekonometrická analýza proces, skládající se z následujících fází: a) specifikace b) kvantifikace c) verifikace d) aplikace Postupné zpřesňování jednotlivých
EKONOMETRIE 7. přednáška Fáze ekonometrické analýzy Ekonometrická analýza proces, skládající se z následujících fází: a) specifikace b) kvantifikace c) verifikace d) aplikace Postupné zpřesňování jednotlivých
NÁSTROJE A TECHNIKY PROJEKTOVÉHO MANAGEMENTU. Projektová dekompozice
 NÁSTROJE A TECHNIKY PROJEKTOVÉHO MANAGEMENTU Projektová dekompozice Úvod do vybraných nástrojů projektového managementu METODY A TECHNIKY PROJEKTOVÉHO MANAGEMENTU Tvoří jádro projektového managementu.
NÁSTROJE A TECHNIKY PROJEKTOVÉHO MANAGEMENTU Projektová dekompozice Úvod do vybraných nástrojů projektového managementu METODY A TECHNIKY PROJEKTOVÉHO MANAGEMENTU Tvoří jádro projektového managementu.
Algoritmy a struktury neuropočítačů ASN - P10. Aplikace UNS v biomedicíně
 Aplikace UNS v biomedicíně aplikace v medicíně postup při zpracování úloh Aplikace UNS v medicíně Důvod: nalezení exaktnějších, levnějších a snadnějších metod určování diagnóz pro lékaře nalezení šetrnějších
Aplikace UNS v biomedicíně aplikace v medicíně postup při zpracování úloh Aplikace UNS v medicíně Důvod: nalezení exaktnějších, levnějších a snadnějších metod určování diagnóz pro lékaře nalezení šetrnějších
rovnic), Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =
, Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =") Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Vyhněte se katastrofám pomocí výpočetní matematiky
 Vyhněte se katastrofám pomocí výpočetní matematiky Stefan Ratschan Ústav informatiky Akademie věd ČR Stefan Ratschan Vyhněte se katastrofám 1 / 29 x. x 2 = 2 Kvíz x. x 2 = 2 x. x 2 7 p q x. x 2 + px +
Vyhněte se katastrofám pomocí výpočetní matematiky Stefan Ratschan Ústav informatiky Akademie věd ČR Stefan Ratschan Vyhněte se katastrofám 1 / 29 x. x 2 = 2 Kvíz x. x 2 = 2 x. x 2 7 p q x. x 2 + px +
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem
 upravit následujícím způsobem") Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Abychom se vyhnuli užití diferenčních sumátorů, je vhodné soustavu rovnic(5.77) upravit následujícím způsobem I 1 = 1 + pl 1 (U 1 +( )), = 1 pc 2 ( I 1+( I 3 )), I 3 = pl 3 (U 3 +( )), 1 U 3 = (pc 4 +1/
Základní definice el. veličin
 Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala, Jan Dudek Oddíl 1 Určeno pro studenty komb. formy FBI předmětu 452081 / 06 Elektrotechnika Základní definice el. veličin Elektrický
Stýskala, 2002 L e k c e z e l e k t r o t e c h n i k y Vítězslav Stýskala, Jan Dudek Oddíl 1 Určeno pro studenty komb. formy FBI předmětu 452081 / 06 Elektrotechnika Základní definice el. veličin Elektrický
KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ
 KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ Radim Pišan, František Gazdoš Fakulta aplikované informatiky, Univerzita Tomáše Bati ve Zlíně Nad stráněmi 45, 760 05 Zlín Abstrakt V článku je představena knihovna
KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ Radim Pišan, František Gazdoš Fakulta aplikované informatiky, Univerzita Tomáše Bati ve Zlíně Nad stráněmi 45, 760 05 Zlín Abstrakt V článku je představena knihovna
Statistika. Regresní a korelační analýza Úvod do problému. Roman Biskup
 Statistika Regresní a korelační analýza Úvod do problému Roman Biskup Jihočeská univerzita v Českých Budějovicích Ekonomická fakulta (Zemědělská fakulta) Katedra aplikované matematiky a informatiky 2008/2009
Statistika Regresní a korelační analýza Úvod do problému Roman Biskup Jihočeská univerzita v Českých Budějovicích Ekonomická fakulta (Zemědělská fakulta) Katedra aplikované matematiky a informatiky 2008/2009
Digitální učební materiál
 Digitální učební materiál Číslo projektu: CZ.1.07/1.5.00/34.0548 Název školy: Gymnázium, Trutnov, Jiráskovo náměstí 325 Název materiálu: VY_32_INOVACE_143_IVT Autor: Ing. Pavel Bezděk Tematický okruh:
Digitální učební materiál Číslo projektu: CZ.1.07/1.5.00/34.0548 Název školy: Gymnázium, Trutnov, Jiráskovo náměstí 325 Název materiálu: VY_32_INOVACE_143_IVT Autor: Ing. Pavel Bezděk Tematický okruh:
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Neuronové časové řady (ANN-TS)
") Neuronové časové řady (ANN-TS) Menu: QCExpert Prediktivní metody Neuronové časové řady Tento modul (Artificial Neural Network Time Series ANN-TS) využívá modelovacího potenciálu neuronové sítě k predikci
Neuronové časové řady (ANN-TS) Menu: QCExpert Prediktivní metody Neuronové časové řady Tento modul (Artificial Neural Network Time Series ANN-TS) využívá modelovacího potenciálu neuronové sítě k predikci