ROTAČNÍ KVADRIKY. Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou
|
|
|
- Ján Bureš
- před 7 lety
- Počet zobrazení:
Transkript
1 ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy. Podle toho, zda rotuje kuželosečka singulární nebo regulární, dělíme i kvadriky na singulární a regulární. Singulární kvadriky jsou rotační válcová a rotační kuželová plocha, které se důkladně studují v základním kurzu zobrazovacích metod. Podobně je důkladně prostudována jedna regulární kvadrika, kulová plocha. Budeme se zabývat kvadrikami, které vzniknou rotací regulární kuželosečky (s výjimkou kružnice) kolem její osy. Průsečíky rotační kvadriky s osou rotace nazýváme vrcholy kvadriky. Podle typu kuželosečky a podle toho, kolem které osy kuželosečka rotuje kvadriky dělíme. Většinou budeme kvadriky studovat v rozšířeném Eukleidovském prostoru. Rotační elipsoidy Rotací elipsy kolem hlavní osy vznikne protáhlý (vejčitý) elipsoid, rotací kolem vedlejší osy vznikne zploštělý elipsoid. Základní vlastnosti mají oba elipsoidy stejné, většinou při konstrukci nemusíme rozlišovat, zda se jedná o elipsoid protáhlý nebo zploštělý. Elipsoid je bodová středová kvadrika, střed je pólem nevlastní roviny vzhledem k elipsoidu, má dva vrcholy. Průnik elipsoidů a nevlastní roviny je prázdná množina. Jestliže je elipsoid protáhlý, leží ohniska elipsy, jejíž rotací vzniká, na ose rotace a jsou společná pro všechny meridiány. Pro protáhlý elipsoid tedy platí, že je to množina bodů v prostoru, jejichž součet vzdáleností od dvou pevných různých bodů je konstantní, větší než vzdálenost daných bodů. Tyto body nazýváme ohniska protáhlého rotačního elipsoidu. Pro zploštělý elipsoid to neplatí, ohniska neleží na ose, při rotaci opíší kružnici. Je-li osa rotace kolmá k půdorysně, je prvním obrysem rovníková kružnice, půdorysem plochy je pak kruh. 1
 kolem její osy.")
2 Rotační paraboloid Rotační paraboloid vzniká rotací paraboly kolem osy, je to bodová nestředová kvadrika, nevlastní rovina se jej dotýká v nevlastním bodě O osy. Má jeden vrchol. Ohnisko tvořící paraboly leží na ose, je společné pro všechny meridiány, řídící přímka tvořící paraboly vyplní rotací rovinu ϕ. Tuto rovinu nazýváme řídící rovina rotačního paraboloidu a platí, že rotační paraboloid je množina bodů v prostoru, které mají od pevného bodu a pevné roviny stejnou vzdálenost. Daný bod nazýváme ohnisko rotačního paraboloidu. Je-li osa kolmá k půdorysně, nemá plocha první obrys, půdorysem plochy je celá rovina π. 2

3 Rotační hyperboloidy Rotační hyperboloidy jsou středové kvadriky, střed je pólem nevlastní roviny vzhledem k danému hyperboloidu. Rotací asymptot vzniká tzv. asymptotická kuželová plocha, která se rotačního hyperboloidu dotýká podél nevlastní regulární kuželosečky l, je to dotyková kuželová plocha opsaná rotačnímu hyperboloidu z jeho středu. Hyperboloidy nemají základní vlastnosti stejné, vlastnosti plochy se liší podle toho, zda hyperbola rotuje kolem hlavní nebo vedlejší osy. Rotační dvojdílný hyperboloid Rotační dvojdílný hyperboloid vzniká rotací hyperboly kolem hlavní osy, je to bodová kvadrika, má dva vrcholy. Ohniska tvořící hyperboly leží na ose, proto platí, že plocha je množinou bodů v prostoru, které mají od dvou pevných různých bodů stálý rozdíl vzdáleností, menší než je vzdálenost daných bodů. Body nazýváme ohniska rotačního hyperboloidu. Stejně jako u rotačního paraboloidu je půdorysem plochy (je-li osa kolmá k π) celá půdorysna. 3

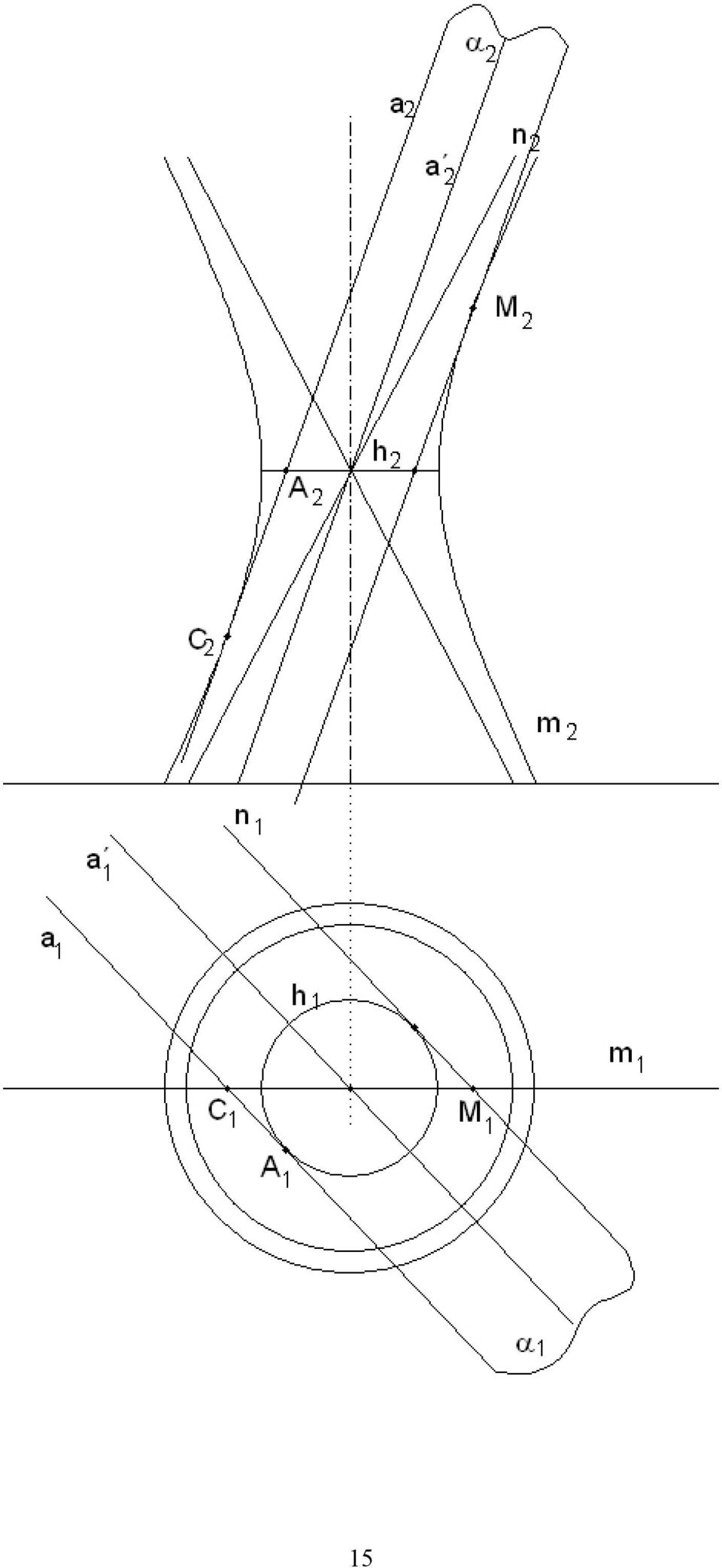
4 Rotační jednodílný hyperboloid Rotační jednodílný hyperboloid Φ vzniká rotací hyperboly kolem vedlejší osy, nemá body na ose. Zvolme bod M na tvořící hyperbole (hlavní meridián), tečná rovina τ plochy Φ v bodě M protíná hyperboloid v kuželosečce, kuželosečka je singulární, protože τ je tečná rovina. Rovina τ procházející středem O plochy Φ rovnoběžná s τ protíná asymptotickou kuželovou plochu Ω ve dvou povrchových přímkách a, n, tedy v kuželosečce typu hyperbola. Φ a Ω se dotýkají podél nevlastní kuželosečky l, roviny τ a τ se protínají v nevlastní rovině v přímce q. Přímka q protíná nevlastní kuželosečku l v bodech A, N (na Ω řez typu hyperbola), tedy i τ protíná plochu Φ v kuželosečce typu hyperbola. τ protne Φ v singulární kuželosečce, protíná ji tedy ve dvou různoběžných přímkách a, n, pro které platí a II a, n II n. Přímka a protíná všechny rovnoběžky plochy Φ, je to tedy také tvořící křivka plochy. a je mimoběžná s osou, kdyby byla různoběžná, obsahovala by Φ bod na ose. Rotační jednodílný hyperboloid tedy vzniká rotací hyperboly kolem vedlejší osy, ale také rotací přímky mimoběžné s osou kolem této osy, je to přímková kvadrika. Nárysy přímek plochy (předpokládáme opět, že osa je kolmá k π) obalí tvořící hyperbolu. Množinu přímek, které vzniknou rotací přímky a kolem osy nazýváme regulus. Přímky jednoho regulu jsou vzájemně mimoběžné. Kdyby byly různoběžné, musely by se protínat v samodružném bodě na ose rotace. Tečná rovina τ obsahuje kromě přímky a i přímku n s ní různoběžnou, rotací přímky n dostáváme II. regulus. Všechny přímky II. regulu jsou opět vzájemně 4

5 mimoběžné. Rotací přímky a vzniká asymptotická kuželová plocha Ω. Ke každé přímce a rotačního jednodílného hyperboloidu tedy existuje přímka a asymptotické kuželové plochy, která je s ní rovnoběžná. Jestliže M je bod hlavního meridiánu (tvořící hyperboly), označme Q k němu souměrný podle středu O hyperboloidu. Tečná rovina 1τ v bodě Q protne Φ opět ve dvojici různoběžek 1a, 1n. Rotací přejde τ do 1τ. V rovině τ leží přímka a, k ní existuje na asymptotické kuželové ploše přímka a s ní rovnoběžná. K přímce a existuje v rovině 1τ přímka plochy Φ a s ní rovnoběžná. Přímky jednoho regulu jsou vzájemně mimoběžné, je tedy a II a II 1n. Ke každé přímce jednoho regulu existuje přímka druhého regulu s ní rovnoběžná. Platí věta: Věta:V rozšířeném Eukleidovském prostoru se na (rotačním) jednodílném hyperboloidu Φ každé dvě přímky různých regulů protínají. Důkaz: Nechť a, p jsou přímky různých regulů plochy Φ. Přímkou a proložíme promítací rovinu τ, τ je tečná rovina, protíná Φ v přímkách a, n různých regulů. Pokud přímka p leží v τ, pak n=p a přímky a, p se protínají. Pokud přímka p neleží v τ, musí τ protínat v bodě R (vlastním nebo 5

6 nevlastním). R patří rovině τ a současně ploše Φ, je tedy částí řezu plochy Φ rovinou τ. Řezem je kuželosečka, tvoří ji přímky a, n. R musí ležet na jedné z těchto přímek (kdyby neležel, řez by tvořily dvě přímky + další bod, což není kuželosečka). R patří přímce p, ta je II. regulu, přímky stejného regulu jsou mimoběžné, musí proto R ležet na a a je tedy průsečíkem přímek a, p. c.b.d. Je-li T libovolný bod plochy vždy jej můžeme kolem o otočit do roviny rovnoběžné s nárysnou na hlavní meridián do bodu 0T. V tomto bodě je tečná rovina 0τ kolmá k průmětně, její průmět splývá s tečnou 0t hlavního meridiánu v bodě 0T. 0τ protíná Φ v přímkách 0a, 0p různých regulů, jejich průsečíkem je bod 0T. Otočíme-li vše zpět do bodu T, přejde přímka 0a do přímky a, přímka 0p do přímky p, dostáváme větu: Věta: Každým bodem T jednodílného (rotačního) hyperboloidu prochází dvě přímky různých regulů. Tyto přímky tvoří tečnou rovinu τ v bodě T a jsou současně řezem plochy rovinou τ. Tečné roviny bodů téže přímky p vytvářejí svazek rovin o ose p. Věta platí opět v rozšířeném Eukleidovském prostoru, v nevlastních bodech A je tečná rovina α určena dvěma rovnoběžnými přímkami a, n různých regulů. Protože se Φ a Ω dotýkají podél nevlastní kuželosečky l, mají v bodě A společnou tečnou rovinu α, která se Ω dotýká podél přímky a rovnoběžné s a, n. Rovina α (tečná rovina v nevlastním bodě) se nazývá asymptotická rovina. Prvním obrysem plochy je hrdelní kružnice (vzniká rotací vrcholů hyperboly), půdorysem je množina vnějších bodů hrdelní kružnice. Druhým obrysem je hyperbola, nárys vnitřní body hyperboly. Sestrojíme hlavní meridián m rotačního jednodílného hyperboloidu v Mongeově projekci s osou kolmou k π, který vznikne rotací přímky a kolem osy o. Určíme bod R přímky a, který je nejblíže ose, půdorys bodu R je pata kolmice sestrojené z o1 na a1. Bod R opisuje hrdlo h, nárys hrdla protíná nárys osy v náryse středu O hyperboly m. Bodem O vedeme přímku a rovnoběžnou s a, její rotací vznikne asymptotická kuželová plocha, jejím druhým obrysem jsou přímky u, v, jsou to asymptoty hyperboly m. Body hrdla h ležící v rovině hlavního meridiánu jsou vrcholy hyperboly m, m je dostatečně určena. 6

7 Řezy rotačních kvadrik Řez roviny ρ s rotační kvadrikou Φ je kuželosečka q. V případě tečné roviny se jedná o kuželosečku singulární, nemá-li rovina s kvadrikou společné body je to prázdná množina, ostatní řezy jsou kuželosečky regulární. Rotační kvadrika je souměrná podle každé roviny procházející osou, rovina je souměrná podle každé roviny k ní kolmé, tj. řez je souměrný podle roviny λ procházející osou rotace a kolmé k rovině řezu ρ. Průsečnice s roviny λ a ρ je tedy osa souměrnosti řezu, tj. osa kuželosečky q. Označme u nevlastní přímku roviny ρ, a l řez kvadriky Φ nevlastní rovinou ω, tj. nevlastní kuželosečka kvadriky. Průsečíky u a l jsou nevlastní body řezu q. Rotační elipsoidy l je prázdná množina, proto řez q neobsahuje nevlastní body, řezem je kuželosečka typu elipsa. Podle polohy roviny vzhledem k elipsoidu pak je řezem buď prázdná množina, jednobodová množina (tečná rovina) nebo elipsa. Konstrukce řezu je obdobná jako pro obecné rotační plochy. Nejprve sestrojíme osu elipsy q řezu, leží v rovině λ procházející osou kolmo k ρ, určíme průsečnici s rovin ρ a λ. V λ leží meridián n rotační kvadriky, otočíme rovinu λ kolem osy o roviny µ rovnoběžné s nárysnou, v otočení určíme průsečíky C, D přímky s a meridiánu n. Osa kvadriky je kolmá k π, půdorys řezu je tedy souměrný podle λ1, C1D1 je osou elipsy q1. Rovina λ je rovinou souměrnosti, 7

8 proto půdorysy tečen řezu v bodech C, D jsou kolmé k λ1 a nárysy jsou rovnoběžné se základnicí. Druhá osa leží na přímce p kolmé k s (tedy na hlavní přímce I. osnovy roviny ρ). Určíme rovinu α procházející přímkou p rovnoběžně s π. α protne kvadriku v rovnoběžce a, společné body a a p jsou další vrcholy elipsy q. V půdoryse je q1 zadána osami, v náryse je q2 zadána sdruženými průměry. Určíme ještě body na obrysech, v nichž se mění viditelnost řezu. V půdoryse je obrysem rovník, rovníkem proložíme rovinu β, ta protne rovinu ρ v hlavní přímce, společné body této přímky a rovníku patří řezu, mění se v nich viditelnost řezu v půdoryse. Druhý obrys leží v rovině µ, rovina µ protne rovinu řezu v hlavní přímce IIhρ druhé osnovy, IIhρ protne hlavní meridián v bodech, v nichž se v náryse mění viditelnost. Rotační paraboloid Rotační paraboloid se v nevlastním bodě O dotýká nevlastní roviny ω. Typ řezu závisí na poloze roviny ρ a bodu O. Neobsahuje-li rovina ρ bod O, tj. není rovnoběžná s osou, je řezem kuželosečka typu elipsa. Opět podle polohy roviny a kvadriky je to buď prázdná množina, jednobodová množina (tečná rovina) nebo elipsa. Obsahuje-li rovina ρ bod O, tj. ρ je rovnoběžná s osou je řezem 8

9 kuželosečka typu parabola. Rotační paraboloid je bodová kvadrika (tj. neobsahuje přímky), proto je řezem parabola. Pro řezy na paraboloidu odvodíme dvě věty, nejprve pro eliptický řez. Nechť je dán rotační paraboloid, F je jeho ohnisko, ϕ řídící rovina, o osa. Zvolme bod R elipsy q řezu a sestrojme R1, pravoúhlý průmět bodu R do ϕ. Z definice rotačního paraboloidu jako množiny bodů víme, že platí IRFI=IR1RI. Sestrojme kulovou plochu κ se středem R a poloměrem IRFI. Tato kulová plocha se roviny ϕ dotýká v bodě R1 a prochází bodem G souměrně sdruženým s bodem F podle roviny ρ. (R leží v ρ a ρ je tak průměrová rovina kulové plochy κ.) Označme M průsečík přímky FG a roviny ϕ. Mocnost bodu M ke kulové ploše je dána vztahem µ=imfi.imgi=imr1i2. Ale IMFI.IMGI je konstanta, nezávisí na volbě bodu R, proto i IMR1I je konstanta. Odvodili jsme: Věta: Pravoúhlý průmět eliptického řezu rotačního paraboloidu do roviny kolmé k ose rotace je kružnice. Konstrukce eliptického řezu. Nejprve sestrojíme body C, D řezu q v rovině souměrnosti λ, stejně jako u elipsoidu je určíme otočením λ do roviny µ rovnoběžné s nárysnou. Půdorys řezu je kružnice q1 nad průměrem C1D1. Z půdorysu určíme krajní body průměru kolmého k CD, v náryse je q2 dáno sdruženými průměry. Bod na druhém obryse je průsečík hlavní přímky druhé osnovy roviny ρ ležící v rovině µ s hlavním meridiánem. 9

10 Pro další odvozování potřebujeme připomenout větu z projektivní geometrie. Věta: Každé dvě různé kuželosečky kvadriky leží na dvou kuželových plochách. Spojnice vrcholů těchto kuželových ploch je polárně sdružená s průsečnicí rovin daných kuželoseček. Nyní mějme roviny 1ρ, 2ρ rovnoběžné s osou kolmé k nárysně. Tyto roviny protínají paraboloid v parabolách 1p, 2p, obě paraboly obsahují bod O. Tyto dvě paraboly leží na dvou kuželových plochách, spojnice jejich vrcholů je polárně sdružená s nevlastní přímkou u v níž se protínají roviny 1ρ, 2ρ. Přímka u prochází bodem O, je to tedy tečna rotačního paraboloidu, proto jsou vrcholy obou kuželových ploch nevlastní, tj. jsou to plochy válcové. Obě paraboly leží na těchto válcových plochách, jsou to shodné paraboly. Otočením kolem o můžeme každou rovinu rovnoběžnou s osou otočit do polohy kolmé k nárysně, odvodili jsme větu: Věta: Všechny paraboly na rotačním paraboloidu jsou shodné křivky. Půdorysem parabolického řezu je úsečka, určíme vrchol paraboly, leží v rovině souměrnosti λ. Ta protíná ρ ve spádové přímce s, která je kolmá k π, a paraboloid v meridiánu n. V otočení určíme společný bod n a s. Dále můžeme např. určit průsečíky rovnoběžky paraboloidu ležící v π s půdorysnou stopou roviny ρ. Bod druhého obrysu opět pomocí hlavní přímky druhé osnovy ležící v rovině µ. 10

11 Rotační hyperboloidy Rotační hyperboloid Φ se dotýká asymptotické kuželové plochy Ω podél nevlastní regulární kuželosečky l. Nevlastní body řezů ploch Φ a Ω rovinou ρ jsou společné, rovina ρ protíná obě plochy v homotetických kuželosečkách q, q. Pokud přímka u roviny ρ není tečnou kuželosečky l, je pól této přímky vzhledem ke q i q středem těchto kuželoseček a kuželosečky q i q jsou soustředné. Podle polohy přímky u a kuželosečky l existují na hyperboloidech řezy všech tří typů, typ elipsa (u a l nemají společné body), typ parabola (u je tečna l ), typ hyperbola ( u a l se protínají ve dvou různých bodech). Rotační dvojdílný hyperboloid Je-li řezem kuželosečka typu elipsa, obsahuje rovina ρ rovnoběžná s rovinou ρ a procházející středem O hyperboloidu, pouze tento bod. Rovina ρ pak buď neprotíná hyperboloid, nebo je tečná (má s hyperboloidem společný pouze bod dotyku), nebo jej protíná v elipse. Je-li řezem kuželosečka typu parabola, rovina ρ se dotýká asymptotické kuželové plochy Ω podél její površky a rovina ρ (i ρ ) protíná hyperboloid v parabole (dvojdílný hyperboloid neobsahuje přímky). Je-li řezem kuželosečka typu hyperbola, rovina ρ protíná Ω ve dvojici různoběžek. Dvojdílný hyperboloid neobsahuje přímky 11
, typ parabola (u je tečna l ), typ hyperbola ( u a l se protínají ve dvou")
12 rovina ρ (i ρ ) jej protíná v hyperbole. Konstrukce řezu je podobná jako pro elipsoidy. Sestrojíme například hyperbolický řez. Nejprve učíme body v rovině souměrnosti λ, λ protíná ρ ve spádové přímce s první osnovy, hyperboloid v meridiánu n (hyperbola). Otočíme rovinu λ do roviny µ rovnoběžné s nárysnou, v otočení určíme společné body A, B spádové přímky s a meridiánu n. Střed S úsečky AB je střed kuželosečky q řezu, AB je hlavní osa q. V půdoryse je A1B1 hlavní osa, v náryse je A2B2 průměr hyperboly q. Rovina ρ procházející středem O hyperboloidu protíná asymptotickou kuželovou plochu ve dvojici různoběžek u, v, tyto přímky obsahují nevlastní body řezu, tj. jsou to přímky rovnoběžné s asymptotami hyperboly q. Body na druhém obryse jsou průsečíky hlavní přímky h druhé osnovy roviny ρ ležící v µ s hlavním meridiánem m. Hyperbola q je body A, B a asymptotami určena, můžeme ještě např. určit průsečíky půdorysné stopy roviny ρ s rovnoběžkou ležící v π nebo získat další body hyperboly k jako u obecných rotačních ploch. Vedeme rovinu α rovnoběžky a a určíme průsečnici rovin ρ a α. Společné body této průsečnice a rovnoběžky a jsou body řezu. 12

13 Rotační jednodílný hyperboloid 13

14 Rotační jednodílný hyperboloid Φ je přímková plocha, řez rovinou ρ je množina průsečíků přímek plochy s rovinou ρ, nenastane tedy případ, že by řezem byla prázdná nebo jednobodová množina. Jestliže přímka u a kuželosečka l nemají společné body (tj. rovina ρ rovnoběžná s ρ procházející středem O hyperboloidu má s asymptotickou kuželovou plochou Ω společný pouze bod O), rovina ρ (i ρ ) protíná hyperboloid v elipse. Jestliže je řezem kuželosečka typu parabola, rovina ρ se plochy Ω dotýká podél površky a. Rovina ρ buď obsahuje přímku a (a II a ) plochy Φ a pak obsahuje ještě další přímku n plochy Φ s ní rovnoběžnou a je to tedy asymptotická rovina, nebo neobsahuje přímku plochy Φ a řezem je parabola. Podobně pro řez typu hyperbola (ρ protíná Ω ve dvojici různoběžek), obsahuje-li ρ přímku a plochy Φ, pak obsahuje i přímku n plochy Φ s ní různoběžnou, ρ je tečná rovina a průsečík T přímek a, n je její bod dotyku. Pokud ρ neobsahuje přímku plochy, je řezem hyperbola. Postup konstrukce je podobný jako u ostatních kvadrik. Sestrojíme například asymptotickou rovinu α přímky a plochy Φ. Přímka a leží na hyperboloidu, její půdorys a1 se dotýká hrdla h1 v bodě A1 a její nárys a2 se dotýká nárysu hlavního meridiánu m2 v bodě C2. Asymptotická rovina α se dotýká asymptotické kuželové plochy Ω podél a rovnoběžné s a. Rovina α obsahuje ještě přímku n druhého regulu plochy Φ rovnoběžnou s přímkou a. Půdorys přímky přímky n1 se opět musí dotýkat h1 a nárys n2 se dotýká m2. 14

15 15
16 Průsečíky přímky s rotační kvadrikou Průsečíky přímky s rotační kvadrikou můžeme určit třemi způsoby, volíme je podle typu kvadriky a podle polohy přímky vzhledem ke kvadrice. Průsečíky přímky s rotačním elipsoidem a) Přímkou proložíme rovinu ρ (nejlépe kolmou k některé průmětně), sestrojíme řez q a určíme společné body X, Y řezu q a přímky p. Řezem je elipsa, určujeme průsečíky přímky s elipsou, konstrukce může být dost nepřesná, volíme raději jiné způsoby konstrukce průsečíků. b) Proložíme-li přímkou p rovinu ρ kolmou k nárysně, protne elipsoid v elipse q. Na elipsoidu leží rovník r v rovině α. Kružnice r a elipsa q jsou kuželosečky ležící na dvou kuželových plochách s vrcholy V, W. Kuželosečky q a r jsou souměrné podle roviny µ hlavního meridiánu, tj. body V, W leží v µ, Určíme jednu z kuželových ploch, například s vrcholem V. Pak elipse q odpovídá v prostorové kolineaci se středem V kružnice r, sestrojíme v této kolineaci obraz p přímky p, p leží v rovině α. Zvolíme na p bod M a určíme jeho obraz M, zvolme například bod M, jehož nárys M2 je průsečíkem hlavního meridiánu m2 a nárysu p2 přímky p. (Bod M není bodem kuželosečky q!) M leží v α a na přímce MV. Bod Q přímky p ležící v α je samodružný. Prostorová kolineace zachovává incidenci bodů a přímek, určíme průsečíky X, Y kružnice r a přímky p a sestrojíme v prostorové kolineaci se středem V jejich obrazy X, Y ležící na p. X, Y jsou průsečíky přímky p s elipsoidem. Tato konstrukce je přesnější než konstrukce řezu, při konstrukci průsečíků přímky s rotačním elipsoidem se používá nejčastěji. 16
 Proložíme-li přímkou p rovinu ρ kolmou k nárysně, protne elipsoid v elipse q. Na elipsoidu leží rovník r v rovině α.")
17 c) Přímkou p opět proložíme rovinu ρ kolmou k ν, která protne elipsoid v kuželosečce q. Označme A vrchol elipsoidu. Pravoúhlý průmět elipsy q z bodu A do π je kružnice q. Přímku p promítneme z bodu A také do π a určíme průsečíky p a q a z bodu A je promítneme zpět na přímku p. Tato konstrukce je rovněž přesnější než první způsob, ovšem často se kružnice q nevejde na nákresnu. 17

18 Průsečíky přímky s rotačním paraboloidem Při sestrojování průsečíků přímky s rotačním paraboloidem využijeme věty, že do roviny kolmé k ose se eliptický řez promítne jako kružnice. Přímkou p proložíme rovinu kolmou k π, sestrojíme půdorys q1 řezu q a v půdoryse určíme průsečíky p1 s kružnicí q1. Průsečíky přímky s rotačními hyperboloidy Průsečíky přímky s rotačními hyperboloidu se v případě obou hyperboloidů konstruují stejně jako u rotačních elipsoidů. Nejčastěji se využívá druhého způsobu (tj. prostorové kolineace). U 18

19 jednodílného hyperboloidu může nastat případ, kdy nárys přímky neprotíná hlavní meridián hyperboloidu, tehdy nelze užít tento způsob a používá se konstrukce řezu vhodnou rovinou, tedy první způsob. Tečné roviny procházející danou přímkou, průniky rotačních kvadrik Tečné roviny procházející danou přímkou Konstrukci tečných rovin rotační bodové kvadriky (rotační elipsoidy, rotační paraboloid a rotační dvojdílný hyperboloid) procházející danou přímkou můžeme sestrojit dvěma způsoby. Na přímce p zvolíme vhodný bod V, z něj kvadrice opíšeme dotykovou kuželovou plochu Ω, ta se kvadriky Φ dotýká podél kuželosečky k ležící v rovině ρ, ρ je polární rovina bodu V vzhledem ke kvadrice Φ. Tečné roviny kuželové plochy Ω procházející přímkou p jsou hledané tečné roviny. Body dotyku jsou body dotyku tečen kuželosečky k sestrojených z průsečíku R přímky p a roviny ρ. Jiný postup: K přímce p sestrojíme přímku q polárně sdruženou s přímkou p vzhledem ke kvadrice Φ. Určíme průsečíky X, Y přímky q s kvadrikou Φ. Body X, Y jsou body dotyku tečných rovin procházejících přímkou p. Pro výše uvedené kvadriky prochází přímkou p dvě různé tečné roviny, jestliže přímka p nemá s kvadrikou žádný společný bod. (Přímka q polárně sdružená s p protíná Φ ve dvou různých bodech). Jestliže se p dotýká bodové kvadriky v bodě T, přímka q polárně sdružená s p vzhledem k Φ prochází také bodem T, existuje jediná tečná rovina procházející přímkou p, její bod dotyku je T. Protíná-li přímka p bodovou kvadriku ve dvou různých bodech neexistuje tečná rovina procházející přímkou p. Sestrojíme tečné roviny rotačního elipsoidu a rotačního dvojdílného hyperboloidu oběma způsoby. Pro rotační elipsoid zvolíme na přímce p bod V ležící v rovině µ hlavního meridiánu m. Kvadrika Φ i opsaná kuželová plocha Ω z bodu V je souměrná podle roviny µ, polární rovina ρ bodu V vzhledem k Φ je tedy kolmá k µ a jejím nárysem je spojnice bodů dotyku m2 sestrojených z V2. Rovina ρ protíná kvadriku v kuželosečce k, přímka p protíná rovinu ρ v bodě R. Určíme body dotyku 1T, 2T tečen 1t, 2t vedených z bodu R ke kuželosečce k. (Konstrukce je podobná jako při určování průsečíků přímky s kvadrikou, hledáme tečnu.) Kuželosečka k i rovník r leží na dvou kuželových plochách, označme W vrchol jedné z nich. Kuželosečky k, r jsou souměrné podle µ, W leží tedy v µ. Nárys W2 leží na ordinále bodu V, která je polárou průsečíku úseček r2, k2 vzhledem k m2. Kuželosečku k promítneme do rovníku z bodu W, bod R se zobrazí do bodu R, sestrojíme tečny 1t, 2t kružnice r s body dotyku 1T, 2T. Body 1T, 2T promítneme zpět z bodu W do bodů 1T, 2T. Tečná rovina 1τ (2τ) je určena přímkou p a bodem 1T (2T). 19

20 Tečné roviny rotačního dvojdílného hyperboloidu Φ procházející přímkou p sestrojíme druhým způsobem, sestrojíme přímku q polárně sdruženou s přímkou p vzhledem k Φ. Přímku q určíme jako průsečnici polárních rovin dvou vhodně zvolených bodů přímky p. Zvolme na p bod V ležící v rovině µ hlavního meridiánu m. Jeho polární rovina ρ vzhledem k Φ je kolmá k nárysně, proto q2=ρ2 je spojnice bodů dotyku m2 sestrojených z V2. Dále zvolme bod W ležící v rovině α rovnoběžné s π a procházející středem O kvadriky. Označme σ polární rovinu bodu W vzhledem k Φ. Dotyková kuželová plocha kvadriky opsaná z W je souměrná podle α a tedy kolmá k α, takže bude σ1=q1. Dále polární rovina σ bodu W je kolmá na rovinu γ=(ow) (Body O, W leží v rovině α.) Rovinu γ otočíme kolem o do µ, γ protíná kvadriku Φ v meridiánu g a rovinu σ v poláře l bodu W vzhledem ke kuželosečce g. V otočení určíme 0l (l je kolmá k π), σ a γ jsou kolmé, proto σ1=q1 je kolmá na γ1 a prochází l1. Přímku q nyní máme určenou nárysem i půdorysem, známou konstrukcí určíme průsečíky X, Y přímky q s kvadrikou Φ. (Využijeme například toho, že rovina π protne kvadriku v kružnici k, přímka q v kuželosečce k, kuželosečky k a k leží na dvou kuželových plochách a pomocí prostorové kolineace určíme průsečíky X, Y.) Hledané tečné roviny jsou určeny přímkou p a bodem X resp. Y. 20

21 Nyní určíme tečné roviny jednodílného rotačního hyperboloidu Φ procházející vlastní přímkou p. Nejprve předpokládejme, že přímka p nemá s Φ žádný společný bod (vlastní ani nevlastní.). Předpokládejme, že τ je tečná rovina plochy Φ procházející přímkou p. Pak tato rovina protíná Φ ve dvojici různoběžek a, n různých regulů. Ovšem v τ leží i p, a protože p nemá žádný společný bod s Φ, tak neprotíná ani a ani n, což je spor s tím, že a, n, p leží v jedné rovině. Tedy přímkou p, která nemá s jednodílným (rotačním) hyperboloidem žádný společný bod neprochází žádná tečná rovina. Nechť přímka p protíná Φ ve dvou různých bodech X, Y (vlastních nebo nevlastních). Je-li jeden z bodů X, Y nevlastní, je přímka p rovnoběžná s některou površkou. Bodem X prochází přímky a, n různých regulů plochy Φ, bodem Y prochází přímky b, q různých regulů. Přímky a, q se protínají v bodě R, tvoří rovinu 1τ, která obsahuje i přímku p, je to tedy tečná rovina plochy Φ obsahující přímku 21
22 p. Podobně Q je průsečíkem přímek b, n, které určují rovinu 2τ různou od 1τ obsahující přímku p, je to rovněž tečná rovina procházející přímkou p. Přímkou p tedy prochází dvě různé tečné roviny plochy Φ. Jestliže se přímka p dotýká Φ v jednom bodě T (vlastním nebo nevlastním), ale celá neleží na Φ, pak p leží v tečné rovině τ plochy, která se plochy Φ dotýká v bodě T, další tečné roviny neexistují. Je-li T nevlastní bod, je τ asymptotická rovina. Pro všechny rotační kvadriky můžeme také sestrojovat tečné roviny rovnoběžné s danou rovinou, sestrojujeme je jako tečné roviny procházející přímkou p. Průniky rotačních kvadrik Mějme dány dvě rotační kvadriky 1Φ, 2Φ. Každá rovina ρ je protíná v kuželosečkách 1k, 2k, tyto kuželosečky se protínají obecně ve 4 bodech, průniková křivka k je čtvrtého stupně (kvartika). Dotýkají-li se kvadriky ve dvou bodech, pak jsou tyto body dvojnásobné a průniková křivka se rozpadá na dvě kuželosečky. Dotýkají-li se kvadriky téže kulové plochy i podél různých kružnic), rozpadá se průnik na dvě kuželosečky. Obecně je pravoúhlým průmětem průnikové křivky rovinná kvartika, leží-li osy obou kvadrik v jedné rovině λ, pak jsou obě plochy i průniková křivka souměrné podle roviny λ. Dva body souměrné podle λ se do λ pravoúhle promítají do jednoho bodu, pravoúhlým průmětem k2 průnikové křivky k do roviny λ je kuželosečka nebo její část. Platí věta: Věta: Nechť 1Φ, 2Φ jsou dvě rotační kvadriky s osami 1o, 2o ležícími v rovině λ. Jsou-li 1o, 2o různoběžné, pak je pravoúhlým průmětem k2 průnikové křivky k do λ část kuželosečky typu hyperbola (elipsa), jestliže nenastane případ, že právě jedna z kvadrik je rotační zploštělý elipsoid (jestliže právě jedna z kvadrik je rotační zploštělý elipsoid). Jsou-li 1o, 2o rovnoběžné, pak je k2 část kuželosečky typu parabola. Uvedená věta platí pro všechny rotační kvadriky, tedy i pro rotační plochy válcové, kuželové a plochu kulovou. Navíc za osu kulové plochy vždy můžeme zvolit přímku, která prochází středem a je rovnoběžná s osou druhé kvadriky. Důkaz: Pro kuželosečku k2 budeme uvažovat i tzv. parazitní části, tj. ty, které neleží na žádné z kvadrik. Nejprve předpokládejme, že nenastane případ, že právě jedna z kvadrik je rotační zploštělý elipsoid. Zvolme osy 1o, 2o v nákresně a uvažujme plochy 1Φ, 2Φ homotetické s 1Φ, 2Φ, které se dotýkají téže kulové plochy. Průniková křivka ploch 1Φ, 2Φ se rozpadá na dvě kuželosečky u, v ležící v rovinách ρ, σ. Uvažujme rovinu 1ρ rovnoběžnou s rovinou ρ. Rovina 1ρ protíná plochy 1Φ, 2Φ v kuželosečkách 1u, 2u, jejich společné body patří průnikové křivce ploch 1Φ, 2Φ. Kuželosečky u, 1u, 2 u leží v rovnoběžných rovinách, jsou homotetické, protínají se ve dvou vlastních a dvou nevlastních bodech. Nevlastní body se promítají do bodu N 2 parazitní části pravoúhlého průmětu průniku a vlastní body 1M, 2M se promítají do bodu M2 na v2. Rovina α rovnoběžná s ρ protíná kvadriky 1Φ, 2Φ v kuželosečkách 1u, 2u homotetických s u, tj. jejich pravoúhlé průměty prochází N 2. Kuželosečky 1u, 2u se protínají v bodech průnikové křivky k ploch 1Φ, 2Φ. Přímka α2 protíná k2 v jednom nevlastním a v jednom vlastním bodě. Podobně pro roviny rovnoběžné s rovinou σ, dostáváme druhý nevlastní bod průmětů kuželoseček ležících v rovinách rovnoběžných se σ. Tedy přímky rovnoběžné s ρ2 resp. σ2 protínají k2 v jednom vlastním a v jednom nevlastním bodě, proto k2 je částí kuželosečky typu hyperbola, ρ2, σ2 udávají její směry asymptot. 22
23 Zploštělému elipsoidu lze kulovou plochu pouze opsat. Pokud řešíme průnik dvou zploštělých elipsoidů postupujeme podobně jako v předchozím případě, jedné kulové ploše vepíšeme homotetické kvadriky s dostaneme, že k2 je opět částí kuželosečky typu hyperbola. Pokud je právě jedna z kvadrik zploštělý elipsoid, sestrojíme homotetické kvadriky 1Φ, 2Φ tak, že jedna je kulové ploše opsaná a druhá vepsaná. Neexistují roviny, které by obě plochy 1Φ, 2Φ protínaly v homotetických kuželosečkách a podle předchozího tedy neexistují nevlastní body kuželosečky, na které leží průmět k2 průnikové křivky k. k2 je tedy částí kuželosečky typu elipsa. 23
24 Jestliže osy 1o, 2o jsou rovnoběžné, pak roviny ρ kolmé k osám protínají plochy 1Φ, 2Φ v kružnicích, které jsou homotetické kuželosečky. Podle první části důkazu leží v rovině λ na kolmicích k osám jeden vlastní a jeden nevlastní bod kuželosečky, na které leží k2. žádné jiné roviny neprotínají obě plochy v homotetických kuželosečkách, k2 je tedy částí kuželosečky typu parabola. Sestrojíme průnik rotačního jednodílného hyperboloidu a rotačního protáhlého elipsoidu s různoběžnými osami ležícími v nárysně. Průniková křivka se ses trojí podobně jako v případě obecných rotačních ploch. Osy rotačních kvadrik leží v nákresně, proto průnikové křivce patří společné body hlavních meridiánů. Pro konstrukci obecných bodů volíme pomocné kulové plochy se středem v průsečíku R os kvadrik. Kulová plocha κ protne jednu kvadriku v rovnoběžkách a, b, druhou v rovnoběžkách c, d, společné body A, C, B, D kružnic patří průnikové křivce k. Nárysem k2 je část hyperboly, pro kterou jsme získali vepsaný rovnoběžník A2B2C2D2, (body A2, D2 patří parazitní části křivky k2) střed tohoto rovnoběžníka je středem hyperboly. Opíšeme-li některé kulové ploše homotetické kvadriky (v tomto případě rotační plochu kuželovou, která vznikne rotací přímek rovnoběžnými s asymptotami tvořící hyperboly a rotační elipsoid, který vznikne rotací homotetické elipsy), získáme směry asymptot křivky k2. k2 je tak dostatečně určena. 24
25 Průnikem rotačního zploštělého elipsoidu a rotačního paraboloidu s různoběžnými osami ležícími v nárysně je křivka, jejímž nárysem je část elipsy. Sestrojíme dostatečný počet bodů (případně tečen) této elipsy. Ke konstrukci bodů použijeme stejnou metodu jako v případě obecných rotačních ploch. Volíme pomocné plochy kulové κ se středem R v průsečíku os rotačních ploch. Tyto kulové plochy mají s rotačními kvadrikami společné rovnoběžkové kružnice a, b, průsečíky těchto kružnic patří průnikové křivce. (V bodech průnikové křivky lze také sestrojit tečny průnikové křivky, jako kolmice ke stopě normálové roviny. Vrcholy normálových kuželových ploch příslušných k rovnoběžkám a, b leží na stopě normálové roviny.) Průnikové křivce k patří i společné body hlavních meridiánů. Určíme alespoň 5 prvků (body, tečny či tečny s body dotyku), elipsa jejíž je k2 částí je pěti prvky dostatečně určena a lze ji sestrojit. 25

26 Průnik rotačního jednodílného hyperboloidu a rotačního dvojdílného hyperboloidu s rovnoběžnými osami ležícími v nárysně se opět sestrojí podobně jako v případě obecných rotačních ploch. Volíme pomocné roviny kolmé k osám kvadrik. Ty protnou kvadriky v rovnoběžkových kružnicích a jejich společné body patří průnikové křivce k. Nárys k2 je částí paraboly, určíme ji dostatečným počtem prvků (např. pěti body). 26

27 Jsou-li osy kvadrik mimoběžné, volíme pomocné roviny tak, aby konstrukce bodů průnikové křivka byla co nejjednodušší. Podle zadání se snažíme sestrojit homotetické kvadriky 1Φ, 2Φ a najít roviny, které je protínají v kuželosečkách u, v. Hledáme pak površky válcových ploch, na kterých leží například u a některá rovnoběžka plochy (rovník, hrdlo). Tyto površky udávají směr, ve kterém se u do roviny kolmé k ose promítne jako kružnice. Takový směr najdeme i pro v a v rovině kolmé k ose pak body průniku určujeme v průmětu jako průsečíky kružnic. 27
28 Rovnoběžné osvětlení rotačních kvadrik, zobrazení rotační kvadrik v různých projekcích Rovnoběžné osvětlení je zadáno nevlastním středem S osvětlení. Mez p vlastního stínu kvadriky Φ je množina bodů dotyku tečen kvadriky Φ procházejících středem S osvětlení, tj. dotyková křivka světelné kuželové plochy Ω (s vrcholem S ) opsané kvadrice Φ. Mez p vlastního stínu je tedy řezem kvadriky Φ polární rovinou ρ bodu S vzhledem ke kvadrice Φ, p je kuželosečka. Pro středovou kvadriku pak platí, že střed O kvadriky Φ leží v rovině ρ, tj. O je také středem kuželosečky p, pro nestředovou musí O ležet v ρ. Označme λ světelnou rovinu procházející osou o rotační kvadriky Φ. λ protíná plochu Φ ve světelném meridiánu, podle λ je souměrná rotační kvadrika i dotyková světelná kuželová plocha, tj. podle λ je souměrná mez p vlastního stínu. Označíme-li q průsečnici rovin ρ a λ, pak na q leží osa kuželosečky p, průsečíky přímky q s kvadrikou Φ jsou vrcholy kuželosečky p. Osvětlujeme-li část kvadriky ohraničenou kružnicí k plochy, pak k vrhá stín k+ na Φ. k+ je množina bodů A+ takových, že A je bod kružnice k, A+ leží na Φ a přímka AA+ prochází bodem S. Vylučujeme pouze případ, kdy AA+ je rovnoběžná s přímkou plochy Φ a tedy A+ je nevlastní. Křivka k+ patří průniku rotační kvadriky Φ a světelné kuželové plochy W (s vrcholem S ) procházející kružnicí k. Plochy Ω a Φ (obě jsou kvadriky, Ω je vlastně kruhová válcová plocha) obsahují kružnici k, jejich průnik se rozpadá na dvě křivky k, k+ druhého stupně, křivky k, k+ leží na kruhové válcové ploše Ω, a křivka k+ je pak elipsa příp. kružnice. Označme ξ rovinu křivky k+. Zvolme kvadriku Φ s osou v ν a směr osvětlení daný bodem S rovnoběžný s ν. V náryse k2 a k2+ jsou úsečky, jejichž krajní body leží na náryse m2 hlavního meridiánu m a jsou vrcholy úplného čtyřrohu vepsaného kuželosečce m2 s diagonálním bodem S2. Z vlastností úplného čtyřrohu vepsaného kuželosečce plyne, že jeho diagonála q2 protější diagonálnímu bodu S2 (spojuje zbývající diagonální body, jeden z nich je průsečík ξ2 a α2, α je rovina kružnice k) je polárou bodu S2 vzhledem k m2. Polární rovina ρ bodu S vzhledem ke kvadrice Φ je kolmá k ν, přímka q leží v ρ, tedy q2=ρ2. Z předcházejících úvah plyne, že roviny α, ρ a ξ) prochází jednou přímkou c, c2 je průsečík přímek α2, ξ2 a ρ2. Jelikož jsme neuvažovali konkrétní kvadriku, můžeme psát: Věta: Nechť k je kružnice rotační kvadriky Φ ležící v rovině α (kolmé k ose o) a nechť ρ je rovina meze p vlastního stínu této kvadriky v osvětlení daní středem S. Pak rovina ξ vrženého stínu k+ kružnice k na plochu Φ prochází průsečnicí c rovin α a ρ. Kuželosečky k a k+ leží na téže kruhové válcové ploše a proto si odpovídají v prostorové afinitě o ose c, jejíž směr je dán bodem S. 28
29 Mez vlastního stínu na rotačním elipsoidu je vždy elipsa, rovina ρ meze vlastního stínu obsahuje střed elipsoidu a proto jej vždy protíná v elipse. Pro rotační paraboloid máme dva případy. Bod S je různý od bodu O paraboloidu, tj. směr s osvětlení není rovnoběžný s osou rotačního paraboloidu. Pak rovina ρ, která je polární rovinou bodu S prochází bodem O, tedy je rovnoběžná s osou paraboloidu a protne paraboloid v parabole. Mezí vlastního stínu je v tomto případě parabola. Jestliže střed S osvětlení splyne s bodem O paraboloidu (s je rovnoběžné s o), pak je polární rovina bodu S nevlastní a mez vlastního stínu neexistuje. Jedna strana plochy je osvětlená, druhá je ve stínu. Rotační dvojdílný hyperboloid protíná nevlastní rovinu v regulární kuželosečce l. Nevlastní přímka u roviny ρ meze vlastního stínu je polárou bodu S vzhledem k l. Jestliže bod S leží vně kuželosečky l (tj. přímka s směru osvětlení procházející středem O hyperboloidu leží vně asymptotické kuželové plochy), pak polára u protíná l ve dvou různých bodech U, V, které patří mezi vlastního stínu p, p je hyperbola. Leží-li S uvnitř l (přímka směru s procházející O leží uvnitř asymptotické kuželové plochy), neprotíná polára u kuželosečku l, řez rovinou ρ neobsahuje nevlastní body, a protože ρ obsahuje střed dvojdílného hyperboloidu, je průnik ρ s kvadrikou prázdná množina. Mez vlastního stínu neexistuje. Podobně, leží-li střed S na kuželosečce l, rovina ρ obsahuje jeden nevlastní bod řezu a prochází O, tj. průnik je jednobodová množina (ρ je tečná rovina v nevlastním bodě), mez vlastního stínu neexistuje. Rovněž rotační jednodílný hyperboloid protíná nevlastní rovinu v regulární kuželosečce l. Nevlastní přímka u roviny ρ meze vlastního stínu je polárou bodu S vzhledem k l. Jestliže bod S leží vně kuželosečky l, polára u protíná l ve dvou různých bodech U, V, které patří mezi vlastního stínu p, p je kuželosečka typu hyperbola. Protože O leží v ρ je mezí vlastního stínu hyperbola. Leží-li S uvnitř l, neprotíná polára u kuželosečku l, řez rovinou ρ je typu elipsa, a protože ρ obsahuje střed hyperboloidu, je mezí vlastního stínu elipsa. Leží-li střed S na kuželosečce l, polára u je tečna kuželosečky l v bodě U, rovina ρ je tečná rovina v nevlastním bodě, tj. asymptotická rovina, mezí vlastního stínu je dvojice rovnoběžek. 29
30 Sestrojíme rovnoběžné osvětlení rotačního protáhlého elipsoidu. V rovině λ světelného meridiánu leží osa elipsy p. Sestrojíme ji otočením roviny λ do roviny µ rovnoběžné s ν. Meridián n v rovině λ se otočí do hlavního meridiánu m, přímka s směru osvětlení procházející bodem na ose se otočí do přímky 0s. Sestrojíme tečny m2 rovnoběžné s 0s2, body dotyku jsou nárysy otočených vrcholů 0 C, 0D elipsy p. Přímka CD je průsečnice roviny ρ meze vlastního stínu s rovinou λ. Druhá osa elipsy leží na přímce kolmé k CD, tedy na hlavní přímce první osnovy roviny ρ. Protože kuželosečka p a kvadrika mají střed O, leží druhá osa v rovině rovníku, vrcholy A, B leží na rovníku a v půdoryse se v nich mění viditelnost meze vlastního stínu. V půdoryse je p1 určena osami, v náryse sdruženými průměry. Body, ve kterých se v náryse mění viditelnost p2, jsou body dotyku tečen m2 rovnoběžných s s2. Vržený stín p je určen osami A B a C D (osa o je kolmá k π). Ohniska meze stínu p vrženého do π můžeme určit pomocí afinity mezi kulovou plochou a rotačním elipsoidem. Známe větu, která platí pro konstrukci ohnisek meze vrženého stínu kulové plochy do π při rovnoběžném osvětlení, užijeme-li afinity, zjistíme, že vržené stíny vrcholů rotačního elipsoidu do roviny kolmé k ose rotace jsou ohniska meze stínu vrženého do této roviny. Rovnoběžné osvětlení rotačního paraboloidu se konstruuje podobně jako rovnoběžné osvětlení rotačních elipsoidů, mezí vlastního stínu je parabola, směr osvětlení není rovnoběžný s osou rotace. Půdorysem meze vlastního stínu je přímka, sestrojíme bod meze vlastního stínu ležící ve světelné rovině λ, užijeme otočení. Rotační paraboloid omezíme kružnicí k, která vrhá stín k+ na plochu. Mez vlastního stínu leží v rovině ρ kolmé k π, průsečnice roviny ρ a roviny α kružnice k je q, její půdorys splývá s půdorysem roviny ρ. k+ je afinní ke kružnici k, osa afinity je q, směr je dán 30
31 směrem osvětlení. Bod X kružnice k ležící v rovině λ vrhá stín X+ na světelný meridián, určíme jej pomocí otočení roviny λ. Bodu X pak v afinitě odpovídá bod X+, lze sestrojit obraz kružnice k. Mez vrženého stínu do π můžeme sestrojit jako množinu vržených stínů bodů meze vlastního stínu. Mez vlastního stínu při rovnoběžném osvětlení rotačního dvojdílného hyperboloidu Φ je hyperbola p, směr osvětlení leží vně asymptotické kuželové plochy. Vrcholy A, B hyperboly p určíme stejně jako v předchozích úlohách. A, B leží ve světelné rovině, jsou to body dotyku tečen světelného meridiánu rovnoběžných se směrem osvětlení. Mez vlastního stínu asymptotické kuželové plochy Ω tvořená přímkami a, b leží v polární rovině bodu S, která prochází bodem O, přímky a, b leží proto také v rovině ρ, rovině meze vlastního stínu p rotačního dvojdílného hyperboloidu Φ. Plochy Φ a Ω se dotýkají podél l, přímky a, b jsou proto asymptotami hyperboly p. Asymptotami a, b a vrcholy A, B je 31
32 hyperbola určena, v náryse je A2B2 průměr neležící na ose p2. Mez k+ stínu vrženého kružnicí k na plochu sestrojíme stejně jako v případě rotačního paraboloidu. Rovnoběžné osvětlení rotačního jednodílného hyperboloidu se konstruuje podobně jako u všech předchozích kvadrik. Hledáme-li navíc mez k+ stínu vrženého kružnicí k na plochu, hledáme osu afinity, která je mezi kružnicemi k a k+. Je-li mezí vlastního stínu parabola nebo hyperbola, protíná mez vlastního stínu kružnici k a těmito body prochází přímka q, která je osou afinity (stejně jako u rotačního paraboloidu). Je-li mezí vlastního stínu elipsa, určíme průsečík Q některé přímky roviny ρ meze vlastního stínu (např. CD) s rovinou kružnice k, tímto bodem prochází přímka q, která je kolmá ke světelné rovině λ. Další konstrukce jsou obdobné. 32
33 obrázek asi špatně Obrys rotační kvadriky v Mongeově projekci Nejprve zobrazíme rotační kvadriku s osou o rovnoběžnou s nárysnou, zobrazíme rotační protáhlý elipsoid. Hlavní meridián je druhým skutečným obrysem. První skutečný obrys p je mez vlastního stínu při osvětlení ve směru kolmém k π, leží v polární rovině ρ bodu S. Rovina ρ je rovnoběžná s π a prochází středem O plochy, nárysem křivky p je úsečka, půdorysem je elipsa. Určíme vrcholy A, B elipsy p, jsou to body, ve kterých se meridiánu m dotýkají přímky směru osvětlení. Body A, B leží v rovině µ meridiánu m, jejich půdorysy leží na o1. Vedlejší vrcholy C, D elipsy p leží na přímce procházející O a kolmé k ν, jsou to průsečíky meze prvního obrysu p a rovníku r. V bodech C1, D1 se r1 a p1 dotýkají. 33
34 Sestrojíme sdružené průměty rotačního jednodílného hyperboloidu Φ s osou o v obecné poloze, plochu omezíme dvěma kružnicemi ležícími v rovinách kolmých k ose. Osou o rotační kvadriky Φ vedeme třetí průmětnu µ kolmou k π a tu sklopíme. V rovině µ leží meridián m, určíme první obrys p plochy Φ, p je mez vlastního stínu při osvětlení ve směru s kolmém k π. Pro konstrukci prvního obrysu leží směr s uvnitř asymptotické kuželové plochy Ω, p je elipsa. Třetí průmět p je úsečka, její krajní body jsou třetí průměty vrcholů A, B elipsy p, A3, B3 jsou body dotyku tečen meridiánu m rovnoběžných s s3. Půdorysy A1B1 leží na o1, vedlejší vrcholy C, D elipsy p leží na přímce kolmé k µ procházející středem O hyperboloidu. V bodech C, D se protínají hrdlo h a obrys p, velikost poloosy CD je tedy rovna poloměru hrdla. Osami AB a CD je elipsa p určena. Sestrojíme půdorysy hraničních kružnic a dostali jsme půdorys části rotačního jednodílného hyperboloidu. Půdorysem celého hyperboloidu je vnější oblast elipsy p1, půdorysy přímek hyperboloidu jsou tečny elipsy p1. Sestrojíme ještě půdorys hrdla h křivky h1 a p1 se dotýkají v bodech C1, D1. Nárys plochy lze sestrojit dvěma způsoby, můžeme užít podobnou konstrukci jako v půdoryse, zvolíme čtvrtou průmětnu, kterou sklopíme a sestrojujeme mez vlastního stínu při osvětlení ve směru kolmém k ν. Nebo zvolíme kružnici k asymptotické kuželové plochy Ω a sestrojíme její nárys k 2 a nárys O2 středu O hyperboloidu. Z O2 sestrojíme tečny ke k 2, získali jsme druhý průmět asymptotické kuželové plochy, druhým skutečným obrysem plochy Φ je tedy hyperbola q, tečny z O2 ke k 2 jsou asymptoty hyperboly q2. Sestrojíme-li nárys h2 hrdla h, jsou hlavní vrcholy h2 také hlavními vrcholy q2 a q2 a h2 se v nich dotýkají. Asymptotami a hlavními vrcholy je q2 určena. 34
35 Obrys rotační kvadriky v pravoúhlé axonometrii Zobrazíme část rotačního paraboloidu s osu rotace z a s hraniční kružnicí k v půdorysně. V promítací rovině λ osy z leží meridián m rotačního paraboloidu. Promítací rovinu sklopíme a ve směru promítání vysuneme. Mez p vlastního stínu při osvětlení ve směru promítání je parabola. Její průmět p3 do roviny λ je úsečka, průmět V vrcholu paraboly je bod dotyku tečny m3 rovnoběžné s s3. Průsečík k3 a p3 je průmět bodů A, B paraboly p ležících na kružnici k, křivky ka a pa se v bodech Aa, Ba dotýkají. Na průmětu obecné rovnoběžky podobně dostáváme další body paraboly p. Parabolu určíme dostatečným počtem bodů. Sestrojíme-li dotykovou kuželovou plochu podél kružnice k a označíme-li W její vrchol, pak přímka WaAa je tečnou paraboly pa v bodě Aa. Stejně pro další body, parabolu pa můžeme tedy také určit dostatečným počtem tečen s body dotyku. 35
36 Obrys rotační kvadriky v kosoúhlém promítání Kosoúhlé promítání je zadáno přidruženou Mongeovou projekcí, stejně jako v případě obecných rotačních ploch sestrojíme sdružené průměty s1, s2 směru promítání. Sestrojíme protáhlý rotační elipsoid s osou rotace z, jeho obrysem p je elipsa. Plocha je zadána hlavním meridiánem ležícím v nárysně. Rovina λ procházející osou a rovnoběžná se směrem promítání protíná plochu ve světelném meridiánu n. Rovinu λ otočíme kolem z do ν, určíme s3, otočený směr promítání. Průmět p3 meze p vlastního stínu v daném osvětlení do roviny λ je úsečka, její krajní body A3, B3 jsou body dotyku tečen hlavního meridiánu rovnoběžných s s3. Přímky rovnoběžné s s3 a jdoucí body A3, B3 protínají osu z v kosoúhlých průmětech Ak, Bk bodů A, B. Sestrojíme kosoúhlý průmět rovníku r, je zadán sdruženými průměry, jeden leží v nárysně druhý je k nárysně kolmý. Opíšeme podél rovníku dotykovou rotační válcovou plochu a sestrojíme její kosoúhlý průmět. Obrys této dotykové rotační válcové plochy tvoří tečny rk rovnoběžné se z, tyto tečny se rk dotýkají v hlavních vrcholech Rk, Qk elipsy rk a jsou také tečnami obrysu pk v těchto bodech, tj. RQ je průměr elipsy p ležící v rovině rovníku. Průměr AB elipsy p leží v rovině λ světelného meridiánu, AB a RQ jsou kolmé a jsou to tedy osy elipsy p, RkQk a AkBk jsou sdružené průměry, elipsa pk je určena. Navíc pk se hlavního meridiánu dotýká v bodech dotyku tečen hlavního meridiánu rovnoběžných s s2. 36
37 37
ŠROUBOVÉ PLOCHY. 1. Základní úlohy na šroubových plochách.
 ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 1. Pomocný učební text
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 29. srpna 2005 verze 1.0 Předmluva
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 29. srpna 2005 verze 1.0 Předmluva
Plochy stavebně-inženýrské praxe
 Plochy stavebně-inženýrské praxe 2. Rotační plochy In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 8 31. Persistent
Plochy stavebně-inženýrské praxe 2. Rotační plochy In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 8 31. Persistent
MONGEOVO PROMÍTÁNÍ - 2. část
 MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
BA03 Deskriptivní geometrie
 BA03 Deskriptivní geometrie Mgr. Jan Šafařík přednášková skupina P-B1VS2 učebna Z240 letní semestr 2013-2014 Jan Šafařík: Úvod do předmětu deskriptivní geometrie Kontakt: Ústav matematiky a deskriptivní
BA03 Deskriptivní geometrie Mgr. Jan Šafařík přednášková skupina P-B1VS2 učebna Z240 letní semestr 2013-2014 Jan Šafařík: Úvod do předmětu deskriptivní geometrie Kontakt: Ústav matematiky a deskriptivní
Průniky rotačních ploch
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Průniky rotačních ploch Vypracoval: Vojtěch Trnka Třída: 8. M Školní rok: 2012/2013 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Průniky rotačních ploch Vypracoval: Vojtěch Trnka Třída: 8. M Školní rok: 2012/2013 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
půdorysu; pro každý bod X v prostoru je tedy sestrojen pouze jeho nárys X 2 a pro jeho
 Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
KMA/G2 Geometrie 2 9. až 11. cvičení
 KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
Pravoúhlá axonometrie. tělesa
 Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
Konstruktivní geometrie
 Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Deg2-Kvadriky. Světlana Tomiczková
 KMA FAV ZČU Plzeň 18. března 2016 Kvadriky Rotační kvadriky singulární (vzniknou rotací singulární kuželosečky) a) rotační válcová plocha x2 + y2 = 1 a 2 a 2 b) rotační kuželová plocha x2 + y2 z2 = 0 a
KMA FAV ZČU Plzeň 18. března 2016 Kvadriky Rotační kvadriky singulární (vzniknou rotací singulární kuželosečky) a) rotační válcová plocha x2 + y2 = 1 a 2 a 2 b) rotační kuželová plocha x2 + y2 z2 = 0 a
Geometrie pro FST 2. Plzeň, 28. srpna 2013, verze 6.0
 Geometrie pro FST 2 Pomocný učební text František Ježek, Světlana Tomiczková Plzeň, 28. srpna 2013, verze 6.0 Předmluva Tento pomocný text vznikl pro potřeby předmětu Geometrie pro FST 2, který vyučujeme
Geometrie pro FST 2 Pomocný učební text František Ježek, Světlana Tomiczková Plzeň, 28. srpna 2013, verze 6.0 Předmluva Tento pomocný text vznikl pro potřeby předmětu Geometrie pro FST 2, který vyučujeme
Klíčová slova Mongeovo promítání, kuželosečka, rotační plocha.
 Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
ŘEŠENÉ PŘÍKLADY DESKRIPTIVNÍ GEOMETRIE. ONDŘEJ MACHŮ a kol.
 ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
MONGEOVO PROMÍTÁNÍ. bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po dlouhou dobu bylo vojenským tajemstvím
 po dlouhou dobu bylo vojenským tajemstvím") část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA. Mgr. Ondřej Machů. --- Pracovní verze:
 DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
Pracovní listy MONGEOVO PROMÍTÁNÍ
 Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
5) Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ
 Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ") 5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
STEREOMETRIE ZÁKLADNÍ POJMY, METRICKÉ VLASTNOSTI, ODCHYLKY, VZDÁLENOSTI. STEREOMETRIE geometrie v prostoru
 Předmět: Ročník: Vytvořil: Datum: MATEMATIKA DRUHÝ Mgr. Tomáš MAŇÁK 4. května 2014 Název zpracovaného celku: STEREOMETRIE ZÁKLADNÍ POJMY, METRICKÉ VLASTNOSTI, ODCHYLKY, VZDÁLENOSTI STEREOMETRIE geometrie
Předmět: Ročník: Vytvořil: Datum: MATEMATIKA DRUHÝ Mgr. Tomáš MAŇÁK 4. května 2014 Název zpracovaného celku: STEREOMETRIE ZÁKLADNÍ POJMY, METRICKÉ VLASTNOSTI, ODCHYLKY, VZDÁLENOSTI STEREOMETRIE geometrie
OBECNÉ ROTAČNÍ PLOCHY
 OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
O rovinných konstrukcích odvozených z prostorových útvarů
 O rovinných konstrukcích odvozených z prostorových útvarů 3. Řešení úloh o kuželosečkách prostorovými vztahy In: Josef Holubář (author): O rovinných konstrukcích odvozených z prostorových útvarů. (Czech).
O rovinných konstrukcích odvozených z prostorových útvarů 3. Řešení úloh o kuželosečkách prostorovými vztahy In: Josef Holubář (author): O rovinných konstrukcích odvozených z prostorových útvarů. (Czech).
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY
 ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
AXONOMETRIE - 2. část
 AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
10. Analytická geometrie kuželoseček 1 bod
 10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
Obrázek 34: Vznik středové kolineace
 6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
Další plochy technické praxe
 Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]
![MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]](/thumbs/55/35543113.jpg "MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]") ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
0 x 12. x 12. strana Mongeovo promítání - polohové úlohy.
 strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Šroubovice... 5 Šroubové plochy Stanovte paprsek tak, aby procházel bodem A a po odrazu na rovině ρ procházel bodem
 Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
ZÁKLADNÍ ZOBRAZOVACÍ METODY
 ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost
 stejnou vzdálenost") Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
PŘÍMKOVÉ PLOCHY. Přednáška DG2*A
 PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI
 KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
Analytická geometrie přímky, roviny (opakování středoškolské látky) = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,
 = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,") Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny společného
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
1.1 Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem
 Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Univerzita Karlova v Praze. Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE. Yulianna Tolkunova. Geometrie stínu. Katedra didaktiky matematiky
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Yulianna Tolkunova Geometrie stínu Katedra didaktiky matematiky Vedoucí bakalářské práce: RNDr. Petra Surynková, Ph.D. Studijní
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Yulianna Tolkunova Geometrie stínu Katedra didaktiky matematiky Vedoucí bakalářské práce: RNDr. Petra Surynková, Ph.D. Studijní
Kuželoseč ky. 1.1 Elipsa
 Kuželoseč ky 1.1 Elipsa Definice: Elipsa je množina všech bodů v 2, které mají od dvou pevných (různých) bodů v 2, zvaných ohniska (značíme F 1, F 2 ), stálý součet vzdáleností rovný 2a, který je větší
Kuželoseč ky 1.1 Elipsa Definice: Elipsa je množina všech bodů v 2, které mají od dvou pevných (různých) bodů v 2, zvaných ohniska (značíme F 1, F 2 ), stálý součet vzdáleností rovný 2a, který je větší
Gymnázium Jiřího Ortena, Kutná Hora. volné rovnoběžné promítání průmětna
 Předmět: Matematika Náplň: Stereometrie, Analytická geometrie, Komplexní čísla Třída: 3. ročník Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor Volné rovnoběžné promítání Zobrazí ve volném rovnoběžném
Předmět: Matematika Náplň: Stereometrie, Analytická geometrie, Komplexní čísla Třída: 3. ročník Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor Volné rovnoběžné promítání Zobrazí ve volném rovnoběžném
Geometrické těleso je prostorově omezený geometrický útvar. Jeho hranicí, povrchem, je uzavřená plocha.
 18. Tělesa řezy, objemy a povrchy, (řez krychle, kvádru, jehlanu, objemy a povrchy mnohostěnů, rotačních těles a jejich částí včetně komolých těles, obvody a obsahy mnohoúhelníků, kruhu a jeho částí) Tělesa
18. Tělesa řezy, objemy a povrchy, (řez krychle, kvádru, jehlanu, objemy a povrchy mnohostěnů, rotačních těles a jejich částí včetně komolých těles, obvody a obsahy mnohoúhelníků, kruhu a jeho částí) Tělesa
P L A N I M E T R I E
 M T E M T I K P L N I M E T R I E rovinná geometrie Základní planimetrické pojmy od - značí se velkými tiskacími písmeny, např.,,. P, Q. Přímka - značí se malými písmeny, např. a, b, p, q nebo pomocí bodů
M T E M T I K P L N I M E T R I E rovinná geometrie Základní planimetrické pojmy od - značí se velkými tiskacími písmeny, např.,,. P, Q. Přímka - značí se malými písmeny, např. a, b, p, q nebo pomocí bodů
AXONOMETRIE. Rozměry ve směru os (souřadnice bodů) jsou násobkem příslušné jednotky.
 jsou násobkem příslušné jednotky.") AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
Zadání domácích úkolů a zápočtových písemek
 Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
2 OSOVÁ AFINITA V ROVINĚ 37
 Kuželosečky Obsah 1 OHNISKOVÉ VLASTNOSTI KUŽELOSEČEK 5 1.1 Úvod..................................... 5 1.2 Elipsa.................................... 9 1.2.1 Ohniskové vlastnosti elipsy.....................
Kuželosečky Obsah 1 OHNISKOVÉ VLASTNOSTI KUŽELOSEČEK 5 1.1 Úvod..................................... 5 1.2 Elipsa.................................... 9 1.2.1 Ohniskové vlastnosti elipsy.....................
Zborcené plochy. Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- tzv. Chaslesova věta:
 Zborcené plochy Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- becném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
Zborcené plochy Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- becném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
Podrobnější výklad tématu naleznete ve studijním textu, na který je odkaz v Moodle. Tam je téma
 Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
BAKALÁŘSKÁ PRÁCE. Řešené úlohy v axonometrii. UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie
 UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie BAKALÁŘSKÁ PRÁCE Řešené úlohy v axonometrii Vypracovala: Barbora Bartošová M-DG, III. ročník Vedoucí práce: RNDr. Miloslava
UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie BAKALÁŘSKÁ PRÁCE Řešené úlohy v axonometrii Vypracovala: Barbora Bartošová M-DG, III. ročník Vedoucí práce: RNDr. Miloslava
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného
: elipsa je průsečnou křivkou rovinného") Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Polibky kružnic: Intermezzo
 Polibky kružnic: Intermezzo PAVEL LEISCHNER Pedagogická fakulta JU, České Budějovice Věta 21 z Archimedovy Knihy o dotycích kruhů zmíněná v předchozím dílu seriálu byla inspirací k tomuto původně neplánovanému
Polibky kružnic: Intermezzo PAVEL LEISCHNER Pedagogická fakulta JU, České Budějovice Věta 21 z Archimedovy Knihy o dotycích kruhů zmíněná v předchozím dílu seriálu byla inspirací k tomuto původně neplánovanému
Animované modely šroubových ploch
 Animované modely šroubových ploch Jaroslav Bušek Abstrakt V příspěvku jsou prezentovány animované prostorové modely přímkových a cyklických šroubových ploch, které byly vytvořeny jako didaktické pomůcky
Animované modely šroubových ploch Jaroslav Bušek Abstrakt V příspěvku jsou prezentovány animované prostorové modely přímkových a cyklických šroubových ploch, které byly vytvořeny jako didaktické pomůcky
2.1 Zobrazování prostoru do roviny
 43 2.1 Zobrazování prostoru do roviny br. 1 o x 1,2 V běžném životě se často setkáváme s instruktážními obrázky, technickými výkresy, mapami i uměleckými obrazy. Většinou jde o zobrazení prostorových útvarů
43 2.1 Zobrazování prostoru do roviny br. 1 o x 1,2 V běžném životě se často setkáváme s instruktážními obrázky, technickými výkresy, mapami i uměleckými obrazy. Většinou jde o zobrazení prostorových útvarů
Mongeova projekce - úlohy polohy
 Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
BA008 Konstruktivní geometrie. Kolmá axonometrie. pro kombinované studium. učebna Z240 letní semestr
 BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Je-li dána hranolová nebo jehlanová plocha s podstavou v rovině σ a rovina řezu ρ:
 Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Pravoúhlá axonometrie
 Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
17 Kuželosečky a přímky
 17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Ročníková práce Konstrukce kuželosečky zadané pěti body
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Konstrukce kuželosečky zadané pěti body Jakub Borovanský 4. C 2011/2012 Zadavatel: Mgr. Ondřej Machů Přísahám, že jsem zadanou ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Konstrukce kuželosečky zadané pěti body Jakub Borovanský 4. C 2011/2012 Zadavatel: Mgr. Ondřej Machů Přísahám, že jsem zadanou ročníkovou
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
Mendelova univerzita. Konstruktivní geometrie
 Mendelova univerzita Petr Liška Konstruktivní geometrie rno 2014 Tato publikace vznikla za přispění Evropského sociálního fondu a státního rozpočtu ČR prostřednictvím Operačního programu Vzdělávání pro
Mendelova univerzita Petr Liška Konstruktivní geometrie rno 2014 Tato publikace vznikla za přispění Evropského sociálního fondu a státního rozpočtu ČR prostřednictvím Operačního programu Vzdělávání pro
s touto válcovou plochou. Tento případ nebudeme dále uvažovat.
 Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Elementární plochy-základní pojmy
 -základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
-základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
5. Konstrukční planimetrické úlohy
 5 Konstrukční planimetrické úlohy 5.1 Řešení konstrukčních úloh 5. Konstrukční planimetrické úlohy Konstrukční úlohou rozumíme úlohu, ve které je požadováno sestrojení jistého geometrického útvaru (alespoň
5 Konstrukční planimetrické úlohy 5.1 Řešení konstrukčních úloh 5. Konstrukční planimetrické úlohy Konstrukční úlohou rozumíme úlohu, ve které je požadováno sestrojení jistého geometrického útvaru (alespoň
Kuželosečky. Klasické definice. Základní vlastnosti. Alča Skálová
 Kuželosečky Alča Skálová Klasické definice Elipsa je množina všech bodů v rovině, majících od dvou pevně daných různých bodů E, F(ohnisek)konstantnísoučetvzdáleností2a,kde2a > EF =2e. Parabola je množina
Kuželosečky Alča Skálová Klasické definice Elipsa je množina všech bodů v rovině, majících od dvou pevně daných různých bodů E, F(ohnisek)konstantnísoučetvzdáleností2a,kde2a > EF =2e. Parabola je množina
KARTOGRAFIE. Rovinné projekce. Gnómické projekce. 1. Pólová gnómonická projekce
 KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta. ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) ---
 ---") DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
ROČNÍKOVÁ PRÁCE Tříúběžníková perspektiva
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Tříúběžníková perspektiva Vypracoval: Zdeněk Ovečka Třída: 4. C Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlášení Prohlašuji,
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Tříúběžníková perspektiva Vypracoval: Zdeněk Ovečka Třída: 4. C Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlášení Prohlašuji,
Důkazy vybraných geometrických konstrukcí
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Důkazy vybraných geometrických konstrukcí Vypracovala: Ester Sgallová Třída: 8.M Školní rok: 015/016 Seminář : Deskriptivní geometrie
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Důkazy vybraných geometrických konstrukcí Vypracovala: Ester Sgallová Třída: 8.M Školní rok: 015/016 Seminář : Deskriptivní geometrie
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie. Pomocný učební text. František Ježek, Světlana Tomiczková
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Další servery s elektronickým obsahem
 Právní upozornění Všechna práva vyhrazena. Žádná část této tištěné či elektronické knihy nesmí být reprodukována a šířena v papírové, elektronické či jiné podobě bez předchozího písemného souhlasu nakladatele.
Právní upozornění Všechna práva vyhrazena. Žádná část této tištěné či elektronické knihy nesmí být reprodukována a šířena v papírové, elektronické či jiné podobě bez předchozího písemného souhlasu nakladatele.
ZBORCENÉ PLOCHY. Zobrazení, které každému bodu X regulární přímky p přiřadí tečnou rovinu plochy v bodě X je projektivní, tj. zachovává dvojpoměr.
 ZBORCENÉ PLOCHY Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V obecném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
ZBORCENÉ PLOCHY Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V obecném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 2003 2004
 PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 003 004 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO M 0030 Vyjádřete jedním desetinným číslem (4 ½ 4 ¼ ) (4 ½ + 4 ¼ ) Správné řešení: 0,5 Zjednodušte výraz : ( 4)
PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 003 004 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO M 0030 Vyjádřete jedním desetinným číslem (4 ½ 4 ¼ ) (4 ½ + 4 ¼ ) Správné řešení: 0,5 Zjednodušte výraz : ( 4)
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
tečen a osu o π, V o; plochu omezte hranou vratu a půdorysnou a proved te rozvinutí
 Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
3.6. ANALYTICKÁ GEOMETRIE PARABOLY
 3.6. ANALYTICKÁ GEOMETRIE PARABOLY V této kapitole se dozvíte: jak je geometricky definována kuželosečka zvaná parabola; co je to ohnisko, řídící přímka, vrchol, osa, parametr paraboly; tvar vrcholové
3.6. ANALYTICKÁ GEOMETRIE PARABOLY V této kapitole se dozvíte: jak je geometricky definována kuželosečka zvaná parabola; co je to ohnisko, řídící přímka, vrchol, osa, parametr paraboly; tvar vrcholové
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika. Bítov Blok 1: Kinematika
 Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
Konstruktivní geometrie
 Mendelova univerzita Alice Králová, Petr Liška, Miroslava Tkadlecová Konstruktivní geometrie Brno 05 Tato publikace vznikla za přispění Evropského sociálního fondu a státního rozpočtu ČR prostřednictvím
Mendelova univerzita Alice Králová, Petr Liška, Miroslava Tkadlecová Konstruktivní geometrie Brno 05 Tato publikace vznikla za přispění Evropského sociálního fondu a státního rozpočtu ČR prostřednictvím
Sedlová plocha (hyperbolický paraboloid)
") Sedlová plocha (hyperbolický paraboloid) v kosoúhlém promítání do nárysny Řešené úlohy Příklad: osoúhlém promítání do nárysny ν (ω =, q = /2) sestrojte vrchol V, osu o a tečnou rovinu τ v bodě T hyperbolického
Sedlová plocha (hyperbolický paraboloid) v kosoúhlém promítání do nárysny Řešené úlohy Příklad: osoúhlém promítání do nárysny ν (ω =, q = /2) sestrojte vrchol V, osu o a tečnou rovinu τ v bodě T hyperbolického
Cyklografie. Užití cyklické projekce a Laguerrových transformací
 Cyklografie Užití cyklické projekce a Laguerrových transformací In: Ladislav Seifert (author): Cyklografie. (Czech). Praha: Jednota československých matematiků a fysiků v Praze, 1949. pp. 95 101. Persistent
Cyklografie Užití cyklické projekce a Laguerrových transformací In: Ladislav Seifert (author): Cyklografie. (Czech). Praha: Jednota československých matematiků a fysiků v Praze, 1949. pp. 95 101. Persistent
Kreslení, rýsování. Zobrazení A B. Promítání E 3 E 2
 Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Analytická geometrie v E 3 - kvadriky
 Analtická geometrie v E 3 - kvadrik ROVNICE KVADRIKY ( v ákladní a posunuté poloe) Kvadrik v ákladní poloe - střed nebo vrchol leží v počátku ( vi příloha na konci) Posunutí v rovnici nahradíme všechn
Analtická geometrie v E 3 - kvadrik ROVNICE KVADRIKY ( v ákladní a posunuté poloe) Kvadrik v ákladní poloe - střed nebo vrchol leží v počátku ( vi příloha na konci) Posunutí v rovnici nahradíme všechn
Gymnázium, Brno, Elgartova 3
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma: Analytická geometrie
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma: Analytická geometrie
Svobodná chebská škola, základní škola a gymnázium s.r.o. Trojúhelník V. kružnice vepsaná a opsaná. konstrukce kružnice vepsaní a opsané trojúhelníku
 METODICKÝ LIST DA39 Název tématu: Autor: Předmět: Ročník: Metody výuky: Formy výuky: Cíl výuky: Získané dovednosti: Stručný obsah: Trojúhelník V. kružnice vepsaná a opsaná Astaloš Dušan Matematika šestý
METODICKÝ LIST DA39 Název tématu: Autor: Předmět: Ročník: Metody výuky: Formy výuky: Cíl výuky: Získané dovednosti: Stručný obsah: Trojúhelník V. kružnice vepsaná a opsaná Astaloš Dušan Matematika šestý
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Technické osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Výjezdní soustředění matematických talentů Karlov pod Pradědem 5. 8. 5. 2012
 Projekt OPVK - CZ.1.07/2.3.00/09.0017 MATES - Podpora systematické práce s žáky SŠ v oblasti rozvoje matematiky Výjezdní soustředění matematických talentů Karlov pod Pradědem 5. 8. 5. 2012 ŘEŠITELNOST
Projekt OPVK - CZ.1.07/2.3.00/09.0017 MATES - Podpora systematické práce s žáky SŠ v oblasti rozvoje matematiky Výjezdní soustředění matematických talentů Karlov pod Pradědem 5. 8. 5. 2012 ŘEŠITELNOST
ROTAČNÍ KVADRIKY V PŘÍKLADECH
 Univerzit Plckého v Olomouci Rozšíření kreditce učitelství mtemtiky učitelství deskriptivní geometrie n PřF UP v Olomouci o formu kombinovnou CZ..07/..00/8.003 ROTAČNÍ KVADRIKY V PŘÍKLADECH Mrie OŠLEJŠKOVÁ,
Univerzit Plckého v Olomouci Rozšíření kreditce učitelství mtemtiky učitelství deskriptivní geometrie n PřF UP v Olomouci o formu kombinovnou CZ..07/..00/8.003 ROTAČNÍ KVADRIKY V PŘÍKLADECH Mrie OŠLEJŠKOVÁ,
1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině.
 Přednáška 1 Mgr.Güttnerová FAST Dg - bakaláři VŠB-TU Ostrava 1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině. Literatura: (1)Černý, J. - Kočandrlová, M.: Konstruktivní
Přednáška 1 Mgr.Güttnerová FAST Dg - bakaláři VŠB-TU Ostrava 1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině. Literatura: (1)Černý, J. - Kočandrlová, M.: Konstruktivní
3.MONGEOVO PROMÍTÁNÍ. Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru
 3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek