ACTIVE SHAPE MODELS. Metody registrace objekt ů v obrázku. Václav Krajíček
|
|
|
- Zbyněk Aleš Říha
- před 7 lety
- Počet zobrazení:
Transkript

1 ACTIVE SHAPE MODELS Metody registrace objekt ů v obrázku Václav Krajíček
2 Oblasti počítačového vidění Segmentace Registrace Active Shape Models Klasifikace
3 Problémy počítačového vidění Šum Geometrické deformace Fotometrické deformace Ill-defined Problem regularizace Restaurace obrazu
4 Typy a metody registrace Registrace z různých pohledů na objekt z různých modalit v různém čase vzhledem k předloze globální/lokální metody metody podle typu deformace v obrazku statistické metody, metody mapovaní bodů, elastické modely
5 Model Matematický popis třídy reálných objektů aproximace pomocí rovnic, vektorů,... Umožňuje Srovnání s realitou Předpověd chování Generovat nové instance Parametry
6 Předchůdci Active Shape Models Klasické metody Registrace 'tuhých' objektů Citlivé na šum, globalní charakter Metody založené na elastických modelech Na míru konkrétní aplikaci, nebo příliž obecné Snakes 1987 Kass et all.
7 Snakes: Active Contour Models Silná nízkorúrovňová metoda registrace kontur Princip minimalizace energie Metody numerické matematiky Počítá se zásahem z vyšší vrstvy Uživatel Jiný algoritmus, software Snake Pit...
8 Ukázka: Tracking Video
9 Jak hadi pracují... Křivky uzavřené i otevřené Spline vnitřní síly, Vnější podmínky vnější síly Kroky: 1)Iniciální poloha křivky Důležita Vnější zásah, heuristiky, náhodný pokus 2)Minimalizace energie systému Určení energetických funkcionálů Řešení diferencialních rovnic Eulerova metoda
10 Minimalizace energie hadů 1 = 0 * E snake 1 = 0 E snake v s ds E int v s E image v s E con v s ds * E snake ' =0
11 Vnitřní & Vnější energie E int = s v s s 2 s v ss s 2 /2 E int i = i v i v i 1 2 /2h 2 i v i 1 2v i v i 1 2 /2h 4 =0 : Vnější podmínky: E ext =E image E con
12 Ukázka: Tracking + Ext. Síly
13 Aproximace * E snake n = i =0 E int i E ext i E int i v i v i 1 i 1 v i 1 v i i 1 [v i 2 2v i 1 v i ] 2 i [v i 1 2v i v i 1 ] i 1 [v i 2v i 1 v i 2 ] f x i, f y i =0 Maticový tvar Explicitní Eulerova metoda Nalezení inverzní matice E ext
14 Výpočet Maticový tvar Eulerova metoda Ax f x x, y =0 Ay f y x, y =0 Ax t f x x t 1, y t 1 = x t x t 1 Ay t f y x t 1, y t 1 = y t y t 1
15 Ukázka
16 Active Shape 'Smart Snakes' 1992 Cootes et all. Registrace 'měkkých' tvarů Modely založené na statistické analýze výskytu reálných objektů Využívá externí znalosti Transformace na parametry modelu
17 Point Distribution Model Reprezentace objektu pomocí očíslovaných (labeled) bodů Nejčasteji na hranici, význačná místa - rohy Vnitřní struktura, okolí Trénovací množina třídy objektů Body na všech členech množiny si musí odpovídat Časově náročné, manuální Obsahuje odbornou znalost
18 Příklad: Labelování rezistorů
19 Zarovnání trénovací množiny Nezáleží na poloze, orientaci a velikosti objektu v trénovacích datech Vytváříme model tvaru Tvar je důležity Otočíme, posuneme, naškálujeme každý prvek trénovací množiny minimalizujeme vážený součet vzdáleností odpovídajících bodů ze všech objektů trénovací množiny
20 Zarovnání dvou tvarů Vektor popisující tvar i x i = x i0, y i0, x i0, y i0,..., x ik, y ik,..., x i n 1, y i n 1 Pro dva tvary i a j E j = x i M j x j T W x i M j x j Váhy W postihují stabilitu bodů napříč trénovací množinou n 1 w k = I=0 V R kl 1
21 Zarovnání dvou tvarů Matice Mj provádí 'tuhé' transformace M j x jk y jk = s jcos x jk s j sin y jk t jx s j sin x jk s j cos y jk t jx Snadno vyřeší při substituci a x =scos a y =ssin
22 Algoritmus zarovnaní celé množiny 1) Zarovnej každý s prvním 2) Opakuj dokud nezkonverguje 1) Spočítej průměr ze všech tvarů 2) Normalizace - důležitá a) Přepočti průměr na standartní rozměry, směr a polohu b) Zarovnej průměr na první tvar 3) Zarovnej všechny tvary na průměr
23 Trénovací množina Model Průměr a odchylky od průměru x= 1 N s x N i dx i =x i x s i=1 Kovarianční matice odchylek S= 1 N s T dx N i dx i s i=1
24 PCT Karhunen-Loèveho transformace Provedeme PCT na odchylky tvarů od průmeru Výsledek PCT Vlastní vektory složky korelované informace, tzv. módy variace Vlastní čísla poměr zastoupení informace příslušném vektoru Sp i = i p i i i 1, p i T p i =1
25 Model Kolik módů variace použiju t stupnů volnosti Hlavní trik 2n = T i=1 i x= x Pb P= p 1 p 2... p t b= b 1 b 2... b t T Výpočet b protože platí P T P =I, pak b =P T x x
26 Příklad
27 Příklad
28 Příklad
29 Další krok Zkombinovat Snakes a náš model Snakes jsou řízeni pouze jednoduchými vnějšími podmínkamy vnější síly Nahradíme vnější síly naším modelem Lokální optimalizace Vyhneme se použití vnitřních sil Hledání vlastností v obrázku zůstává Získáme lokalizátor objektů vedený modelem naučeným z reálných dat Dokáže se lépe vyrovnat s chybamy v obraze
30 Algoritmus registrace 1) Počáteční odhad polohy modelu a bodů v obraze 2) Opakuj dokud nezkonverguje a) Nalezni lepší pozice pro body b) Přepočítej posunutí, orientaci a zvětšení modelu c) Spočítej změněné parametry modelu d) Spočítej novou polohu bodů v rámci parametrů modelu
31 Nalezení lepší pozice pro body Mnoha způsoby Body model si sebou mohou nest další informace Prohledávání obrázku Detekce hran Na normále k hranici modelu, podle tlouštky hrany Využití šedotonového spektra v okolí Ruzné typy okolí
32 Přepočet polohy modelu Hledáme (dxc, dyc), (1+ds) a d, aby součet vzdáleností bodů takto modifikového modelu a nalezených lepších pozic byl nejmenší Lze přesně, ale aproximace stačí
33 Výpočet nových parametrů modelu Hledám rezidua nových poloh bodů modelu a lepších poloh pro body v lokálním sytému souřadnic modelu M s 1 ds, d [ x d x ] X c dx c = X dx dx=m s 1 ds 1, d [M s, [x] dx dxc] x Nové pozice bodů nemusí být v limitu modelu! x d x x P b d b
34 Výpočet nových parametrů modelu Odečteme model od předchozí aproximace d x P d b d b =P T d x Kontrola a zabránění překročení limitů parametrů modelu t D 2 = m i =1 b 2 i i D max b i b D max i i =1..t D m

35 Ukázka: Rezistory

36 Ukázka: Ruka
37 Vyhledávání podle úrovně šedé Vylepšení postupu pro nalezení lepších pozic Spočítam průměrné okolí bodů v trénovací množině Okolí libovolného tvaru Pro jednoduchost usečka ve směru normály k hranici profil g ijk =I j y i k 1 I j y i k 1
38 Vyhledávání podle úrovně šedé Normalizace + derivace invariance k přičtení a vynásobení konstantou g ij ' = g ij N s n p g ijk ' g i = 1 k =1 N s j =1 g ij ' Vyhledávání minimalizace Mahalanobisovy vzdálenosti f prof = h d g T S g 1 h d g
39 Genetické algoritmy Řešení vyhledávacího problému Iterativní proces nad množinou možných řešení Výběr nejlepších kandidátu pro další generaci Fitness funkce Mutace, křížení Pro naší ulohu jedinec reprezentuje polohu a parametry modelu Úspěšně použito rychlejší vyhledávání
40 Genetické algoritmy Dva způsoby začlenění GA 1) Předzpracování nalezení startovní pozice pro ASM 2) Začlenění ASM do GA hledat optimum přímo pomocí GA
41 Příklad: Lékařské aplikace Většina organů v těle je deformovatelná, Exempláře se tvarem mohou podstatně lišit Přesto základní struktura a topologie je stejná Úloha registrace orgánů MR, CT Úloha trackování orgánů na záznamu Ultrazvuk Echokardiogram CAS Existuje mnoho trénovacích dat
42 Ukázka: Echokardiogram
43 Ukázka: Echokardiogram
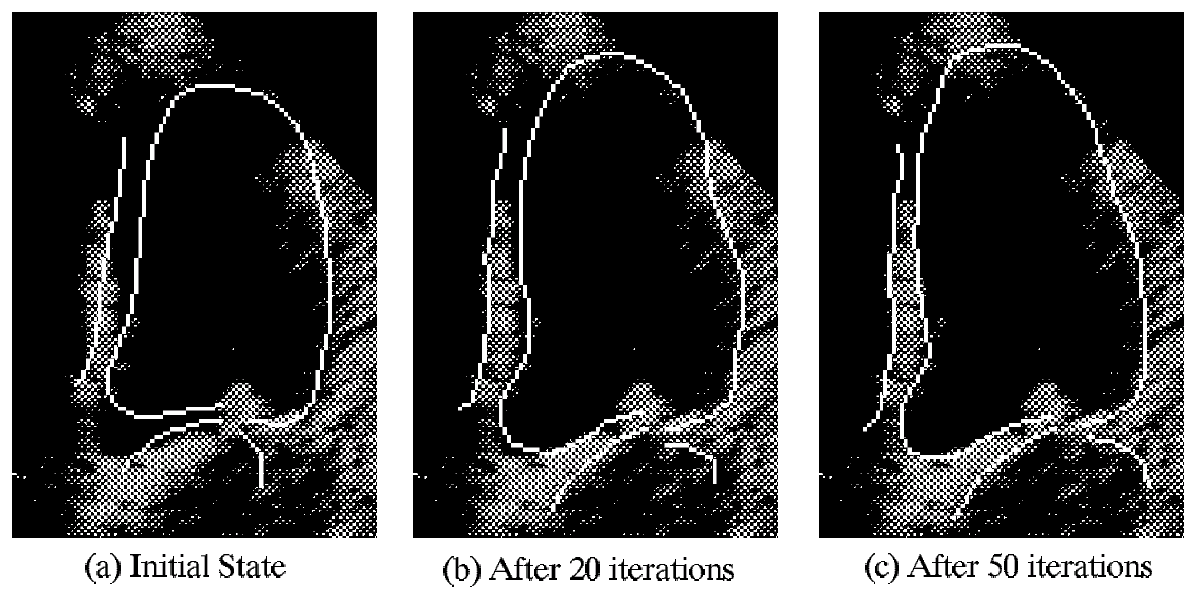
44 Ukázka: Echokradiogram

45 Ukázka: Echokradiogram - tracking

46 Ukázka: MR - řezy mozkem
47 Rozšíření do 3D 1) 2D verze na řezy a pak spojit odpovídající body v sousedních řezech Zavádí se systematická chyba
48 Rozšíření do 3D 2) Plný 3D PDM Náročné vytvoření trénovací množiny Interaktivní software pro tvorbu PDM Náročnější na výpočet, více dat bodů na model, modů variace 30 sec ASM + 10 min GA na SUNsparc10 (1993) Člověku trvá segmentace v řádech hodin

49 Ukázka: Model mozku

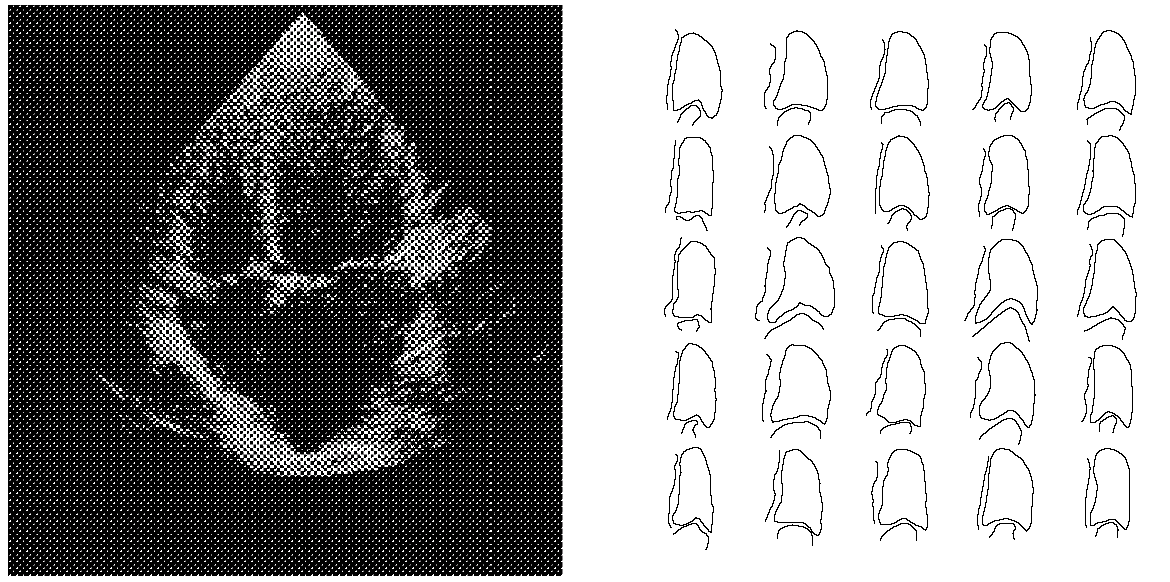
50 Ukázka: Módy variace 3D PDM
51 Závěr Pohled na objekty přes minima jistých funkcionálů Tvorba modelů Hledání objektů v datech pomocí modelů Přímým výpočtem numerické metody Iteračním prohledávání lokální optimalizace Genetickými algoritmy Ukázky a příklady
52 Reference M.Kass A.Witkin and D.Terzopoulos Snakes: Active Contour Models Training Models of Shape from Sets of Examples T.F.Cootes, C.J.Taylor, D.H.Cooper, J.Graham Active Shape Models 'Smart Snakes' T.F.Cootes, C.J.Taylor Use of Image Shape Models For Locating in Medical Images T.F.Cootes, A.Hill, C.J.Taylor and J.Haslam Model-Based Interpretation of 3D Medical Images A.Hill, A. Thorman an C.J.Taylor
53
Zpracování digitalizovaného obrazu (ZDO) - Popisy III
 - Popisy III") Zpracování digitalizovaného obrazu (ZDO) - Popisy III Statistické popisy tvaru a vzhledu Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování
Zpracování digitalizovaného obrazu (ZDO) - Popisy III Statistické popisy tvaru a vzhledu Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování
Jaroslav Tuma. 8. února 2010
 Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Zpracování digitalizovaného obrazu (ZDO) - Segmentace II
 - Segmentace II") Zpracování digitalizovaného obrazu (ZDO) - Segmentace II Další metody segmentace Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného
Zpracování digitalizovaného obrazu (ZDO) - Segmentace II Další metody segmentace Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného
stránkách přednášejícího.
 Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
UNIVERZITA PARDUBICE. 4.4 Aproximace křivek a vyhlazování křivek
 UNIVERZITA PARDUBICE Licenční Studium Archimedes Statistické zpracování dat a informatika 4.4 Aproximace křivek a vyhlazování křivek Mgr. Jana Kubátová Endokrinologický ústav V Praze, leden 2012 Obsah
UNIVERZITA PARDUBICE Licenční Studium Archimedes Statistické zpracování dat a informatika 4.4 Aproximace křivek a vyhlazování křivek Mgr. Jana Kubátová Endokrinologický ústav V Praze, leden 2012 Obsah
Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika)
") Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Kombinatorická minimalizace
 Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Matematika pro geometrickou morfometrii
 Matematika pro geometrickou morfometrii Václav Krajíček Vaclav.Krajicek@mff.cuni.cz Department of Software and Computer Science Education Faculty of Mathematics and Physics Charles University Přednáška
Matematika pro geometrickou morfometrii Václav Krajíček Vaclav.Krajicek@mff.cuni.cz Department of Software and Computer Science Education Faculty of Mathematics and Physics Charles University Přednáška
Nelineární optimalizace a numerické metody (MI NON)
") Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Co je obsahem numerických metod?
 Numerické metody Úvod Úvod Co je obsahem numerických metod? Numerické metody slouží k přibližnému výpočtu věcí, které se přesně vypočítat bud nedají vůbec, nebo by byl výpočet neúměrně pracný. Obsahem
Numerické metody Úvod Úvod Co je obsahem numerických metod? Numerické metody slouží k přibližnému výpočtu věcí, které se přesně vypočítat bud nedají vůbec, nebo by byl výpočet neúměrně pracný. Obsahem
Circular Harmonics. Tomáš Zámečník
 Circular Harmonics Tomáš Zámečník Úvod Circular Harmonics Reprezentace křivky, která je: podmonožinou RxR uzavřená funkcí úhlu na intervalu Dále budeme hovořit pouze o takovýchto křivkách/funkcích
Circular Harmonics Tomáš Zámečník Úvod Circular Harmonics Reprezentace křivky, která je: podmonožinou RxR uzavřená funkcí úhlu na intervalu Dále budeme hovořit pouze o takovýchto křivkách/funkcích
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
ODR metody Runge-Kutta
 ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
ODR metody Runge-Kutta Teorie (velmi stručný výběr z přednášek) Úloha s počátečními podmínkami (Cauchyova) 1 řádu Hledáme aprox řešení Y(x) soustavy obyčejných diferenciálních rovnic 1 řádu kde Y(x) =
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Úvod do optimalizace, metody hladké optimalizace
 Evropský sociální fond Investujeme do vaší budoucnosti Úvod do optimalizace, metody hladké optimalizace Matematika pro informatiky, FIT ČVUT Martin Holeňa, 13. týden LS 2010/2011 O čem to bude? Příklady
Evropský sociální fond Investujeme do vaší budoucnosti Úvod do optimalizace, metody hladké optimalizace Matematika pro informatiky, FIT ČVUT Martin Holeňa, 13. týden LS 2010/2011 O čem to bude? Příklady
Co jsme udělali: Au = f, u D(A)
") Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
I. Diferenciální rovnice. 3. Rovnici y = x+y+1. převeďte vhodnou transformací na rovnici homogenní (vzniklou
 Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda
 Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
Numerické metody a programování. Lekce 7
 Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
Numerické metody a programování Lekce 7 Řešení nelineárních rovnic hledáme řešení x problému f x = 0 strategie: odhad řešení iterační proces postupného zpřesňování řešení výpočet skončen pokud je splněno
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Dobývání znalostí. Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze
 Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Bayesovské modely Doc. RNDr. Iveta Mrázová, CSc.
Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Bayesovské modely Doc. RNDr. Iveta Mrázová, CSc.
Matematika pro geometrickou morfometrii (2)
") Ján Dupej (jdupej@cgg.mff.cuni.cz) Laboratoř 3D zobrazovacích a analytických metod Katedra antropologie a genetiky člověka Přírodovědecká fakulta UK v Praze Opakování 2 Opakování 3 Opakování 4 Opakování
Ján Dupej (jdupej@cgg.mff.cuni.cz) Laboratoř 3D zobrazovacích a analytických metod Katedra antropologie a genetiky člověka Přírodovědecká fakulta UK v Praze Opakování 2 Opakování 3 Opakování 4 Opakování
Statistické modely tvaru a vzhledu
 Kapitola 1 Statistické modely tvaru a vzhledu V této kapitole nastíním problematiku statistických modelů tvaru, jejich využití a metod potřebných pro jejich výpočet a použití. Existují dvě hlavní metody;
Kapitola 1 Statistické modely tvaru a vzhledu V této kapitole nastíním problematiku statistických modelů tvaru, jejich využití a metod potřebných pro jejich výpočet a použití. Existují dvě hlavní metody;
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory
 Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Matematika I A ukázkový test 1 pro 2011/2012. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a
x + (a + 1)y + z = 1 a") Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od jara 2016
 Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od jara 206 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od jara 206 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
Úvod do mobilní robotiky AIL028
 SLAM - souběžná lokalizace a mapování {md zw} at robotika.cz http://robotika.cz/guide/umor07/cs 10. ledna 2008 1 2 3 SLAM intro Obsah SLAM = Simultaneous Localization And Mapping problém typu slepice-vejce
SLAM - souběžná lokalizace a mapování {md zw} at robotika.cz http://robotika.cz/guide/umor07/cs 10. ledna 2008 1 2 3 SLAM intro Obsah SLAM = Simultaneous Localization And Mapping problém typu slepice-vejce
Numerické řešení variačních úloh v Excelu
 Numerické řešení variačních úloh v Excelu Miroslav Hanzelka, Lenka Stará, Dominik Tělupil Gymnázium Česká Lípa, Gymnázium Jírovcova 8, Gymnázium Brno MirdaHanzelka@seznam.cz, lenka.stara1@seznam.cz, dtelupil@gmail.com
Numerické řešení variačních úloh v Excelu Miroslav Hanzelka, Lenka Stará, Dominik Tělupil Gymnázium Česká Lípa, Gymnázium Jírovcova 8, Gymnázium Brno MirdaHanzelka@seznam.cz, lenka.stara1@seznam.cz, dtelupil@gmail.com
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014. 1. Obor reálných čísel
 Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Státnice odborné č. 20
 Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
Čebyševovy aproximace
 Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Dnešní látka: Literatura: Kapitoly 3 a 4 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Extrémy funkce dvou proměnných
 Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Výpočet průsečíků paprsku se scénou
 Výpočet průsečíků paprsku se scénou 1996-2018 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Intersection 2018 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 26 Průsečík
Výpočet průsečíků paprsku se scénou 1996-2018 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Intersection 2018 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 26 Průsečík
LOKALIZACE ZDROJŮ AE NEURONOVÝMI SÍTĚMI NEZÁVISLE NA ZMĚNÁCH MATERIÁLU A MĚŘÍTKA
 LOKALIZACE ZDROJŮ AE EUROOVÝMI SÍTĚMI EZÁVISLE A ZMĚÁCH MATERIÁLU A MĚŘÍTKA AE SOURCE LOCATIO BY EURAL ETWORKS IDEPEDET O MATERIAL AD SCALE CHAGES Milan CHLADA, Zdeněk PŘEVOROVSKÝ Ústav termomechaniky
LOKALIZACE ZDROJŮ AE EUROOVÝMI SÍTĚMI EZÁVISLE A ZMĚÁCH MATERIÁLU A MĚŘÍTKA AE SOURCE LOCATIO BY EURAL ETWORKS IDEPEDET O MATERIAL AD SCALE CHAGES Milan CHLADA, Zdeněk PŘEVOROVSKÝ Ústav termomechaniky
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Metamorfóza obrázků Josef Pelikán CGG MFF UK Praha
 Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
Metamorfóza obrázků 1998-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Morphing 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 21 Metamorfóza obrázků -
Řešení diferenciálních rovnic
 Projekt M3 Řešení diferenciálních rovnic 1. Zadání A. Stanovte řešení dané diferenciální rovnice popřípadě soustavy rovnic. i) Pro úlohy M3.1 až M3.12: uveďte matematický popis použité metody sestavte
Projekt M3 Řešení diferenciálních rovnic 1. Zadání A. Stanovte řešení dané diferenciální rovnice popřípadě soustavy rovnic. i) Pro úlohy M3.1 až M3.12: uveďte matematický popis použité metody sestavte
Téma je podrobně zpracováno ve skriptech [1], kapitola 6, strany
![Téma je podrobně zpracováno ve skriptech [1], kapitola 6, strany](/thumbs/44/23250842.jpg "Téma je podrobně zpracováno ve skriptech [1], kapitola 6, strany") 3 Metoda nejmenších čtverců 3 Metoda nejmenších čtverců Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 6, strany 73-80. Jedná se o třetí možnou metodu aproximace,
3 Metoda nejmenších čtverců 3 Metoda nejmenších čtverců Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 6, strany 73-80. Jedná se o třetí možnou metodu aproximace,
1 0 0 u 22 u 23 l 31. l u11
 LU dekompozice Jedná se o rozklad matice A na dvě trojúhelníkové matice L a U, A=LU. Matice L je dolní trojúhelníková s jedničkami na diagonále a matice U je horní trojúhelníková. a a2 a3 a 2 a 22 a 23
LU dekompozice Jedná se o rozklad matice A na dvě trojúhelníkové matice L a U, A=LU. Matice L je dolní trojúhelníková s jedničkami na diagonále a matice U je horní trojúhelníková. a a2 a3 a 2 a 22 a 23
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách
 Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
7 Transformace 2D. 7.1 Transformace objektů obecně. Studijní cíl. Doba nutná k nastudování. Průvodce studiem
 7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
7 Transformace 2D Studijní cíl Tento blok je věnován základním principům transformací v rovinné grafice. V následujícím textu bude vysvětlen rozdíl v přístupu k transformacím u vektorového a rastrového
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Generování sítě konečných prvků
 Generování sítě konečných prvků Jaroslav Beran Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování vlastností
Generování sítě konečných prvků Jaroslav Beran Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování vlastností
ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE. Matematika 0A1. Cvičení, zimní semestr. Samostatné výstupy. Jan Šafařík
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
MATEMATIKA V MEDICÍNĚ
 MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
Princip řešení soustavy rovnic
 Princip řešení soustavy rovnic Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Formulace úlohy Metody řešení
Princip řešení soustavy rovnic Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Formulace úlohy Metody řešení
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků
 Přednáška 2 Princip metody konečných prvků") Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu
 - Analýza pohybu") Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu Úvod Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu (ZDO)
Zpracování digitalizovaného obrazu (ZDO) - Analýza pohybu Úvod Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu (ZDO)
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Gymnázium Česká a Olympijských nadějí, České Budějovice, Česká 64, 37021
 Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
Základní spádové metody
 Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
Soustavy lineárních rovnic
 Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Kružnice, kruh, tečny, obsahy, goniometrické funkce, integrace
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Kružnice, kruh, tečny, obsahy, goniometrické funkce, integrace
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY
 POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
Algoritmy pro shlukování prostorových dat
 Algoritmy pro shlukování prostorových dat Marta Žambochová Katedra matematiky a informatiky Fakulta sociálně ekonomická Univerzita J. E. Purkyně v Ústí nad Labem ROBUST 21. 26. leden 2018 Rybník - Hostouň
Algoritmy pro shlukování prostorových dat Marta Žambochová Katedra matematiky a informatiky Fakulta sociálně ekonomická Univerzita J. E. Purkyně v Ústí nad Labem ROBUST 21. 26. leden 2018 Rybník - Hostouň
Lineární klasifikátory
 Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
BROB Základy robotiky. Ing. František Burian, Ph.D. Jan Macháček VUT ID: Martin Pavelka VUT ID:
 Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Předmět: BROB Základy robotiky Rok vypracování: 2018 Název projektu: Vedoucí práce: Realizace inverzní kinematiky manipulátoru Ing. František Burian, Ph.D. Autoři projektu: František Majvald VUT ID: 195601
Rosenblattův perceptron
 Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Řešení. Označme po řadě F (z) Odtud plyne, že
 Odtud plyne, že") Úloha Nechť ~ R(, ) a Y = Jinak řečeno, Y je odmocnina čísla vybraného zcela náhodně z intervalu (, ) Popište rozdělení veličiny Y a určete jeho modus, medián, střední hodnotu a rozptyl Řešení Označme
Úloha Nechť ~ R(, ) a Y = Jinak řečeno, Y je odmocnina čísla vybraného zcela náhodně z intervalu (, ) Popište rozdělení veličiny Y a určete jeho modus, medián, střední hodnotu a rozptyl Řešení Označme
Numerická matematika Písemky
 Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Numerická matematika Písemky Bodování Každá písemka je bodována maximálně 20 body. Celkem student může získat za písemky až 40 bodů, pro udělení zápočtu musí získat minimálně 20 bodů. Písemka č. 1 Dva
Kapitola 10: Diferenciální rovnice 1/14
 Kapitola 10: Diferenciální rovnice 1/14 Co je to diferenciální rovnice? Definice: Diferenciální rovnice je vztah mezi hledanou funkcí y(x), jejími derivacemi y (x), y (x), y (x),... a nezávisle proměnnou
Kapitola 10: Diferenciální rovnice 1/14 Co je to diferenciální rovnice? Definice: Diferenciální rovnice je vztah mezi hledanou funkcí y(x), jejími derivacemi y (x), y (x), y (x),... a nezávisle proměnnou
Algoritmus pro hledání nejkratší cesty orientovaným grafem
 1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
1.1 Úvod Algoritmus pro hledání nejkratší cesty orientovaným grafem Naprogramoval jsem v Matlabu funkci, která dokáže určit nejkratší cestu v orientovaném grafu mezi libovolnými dvěma vrcholy. Nastudoval
aneb jiný úhel pohledu na prvák
 Účelná matematika aneb jiný úhel pohledu na prvák Jan Hejtmánek FEL, ČVUT v Praze 24. června 2015 Jan Hejtmánek (FEL, ČVUT v Praze) Technokrati 2015 24. června 2015 1 / 18 Outline 1 Motivace 2 Proč tolik
Účelná matematika aneb jiný úhel pohledu na prvák Jan Hejtmánek FEL, ČVUT v Praze 24. června 2015 Jan Hejtmánek (FEL, ČVUT v Praze) Technokrati 2015 24. června 2015 1 / 18 Outline 1 Motivace 2 Proč tolik
PRAVDĚPODOBNOST A STATISTIKA
 PRAVDĚPODOBNOS A SAISIKA Regresní analýza - motivace Základní úlohou regresní analýzy je nalezení vhodného modelu studované závislosti. Je nutné věnovat velkou pozornost tomu aby byla modelována REÁLNÁ
PRAVDĚPODOBNOS A SAISIKA Regresní analýza - motivace Základní úlohou regresní analýzy je nalezení vhodného modelu studované závislosti. Je nutné věnovat velkou pozornost tomu aby byla modelována REÁLNÁ
Tematický plán Obor: Informační technologie. Vyučující: Ing. Joanna Paździorová
 Tematický plán Vyučující: Ing. Joanna Paździorová 1. r o č n í k 5 h o d i n t ý d n ě, c e l k e m 1 7 0 h o d i n Téma- Tematický celek Z á ř í 1. Opakování a prohloubení učiva základní školy 18 1.1.
Tematický plán Vyučující: Ing. Joanna Paździorová 1. r o č n í k 5 h o d i n t ý d n ě, c e l k e m 1 7 0 h o d i n Téma- Tematický celek Z á ř í 1. Opakování a prohloubení učiva základní školy 18 1.1.
algoritmus»postup06«p e t r B y c z a n s k i Ú s t a v g e o n i k y A V
 Hledání lokálního maxima funkce algoritmus»postup06«p e t r B y c z a n s k i Ú s t a v g e o n i k y A V Č R Abstrakt : Lokální maximum diferencovatelné funkce je hledáno postupnou změnou argumentu. V
Hledání lokálního maxima funkce algoritmus»postup06«p e t r B y c z a n s k i Ú s t a v g e o n i k y A V Č R Abstrakt : Lokální maximum diferencovatelné funkce je hledáno postupnou změnou argumentu. V
Rekonstrukce křivek a ploch metodou postupné evoluce
 Rekonstrukce křivek a ploch metodou postupné evoluce Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz Přehled Evoluce křivek princip evoluce použití evoluce křivky ve
Rekonstrukce křivek a ploch metodou postupné evoluce Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz Přehled Evoluce křivek princip evoluce použití evoluce křivky ve
Geometrické transformace pomocí matic
 Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Slajdy k přednášce Lineární algebra I
 Slajdy k přednášce Lineární algebra I Milan Hladík Katedra Aplikované Matematiky, Matematicko-fyzikální fakulta, Univerzita Karlova v Praze, http://kammffcunicz/~hladik 22 října 203 Intro Nejstarší zaznamenaná
Slajdy k přednášce Lineární algebra I Milan Hladík Katedra Aplikované Matematiky, Matematicko-fyzikální fakulta, Univerzita Karlova v Praze, http://kammffcunicz/~hladik 22 října 203 Intro Nejstarší zaznamenaná
Aproximace funkcí. x je systém m 1 jednoduchých, LN a dostatečně hladkých funkcí. x c m. g 1. g m. a 1. x a 2. x 2 a k. x k b 1. x b 2.
 Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
FOURIEROVA ANAL YZA 2D TER ENN ICH DAT Karel Segeth
 FOURIEROVA ANALÝZA 2D TERÉNNÍCH DAT Karel Segeth Motto: The faster the computer, the more important the speed of algorithms. přírodní jev fyzikální model matematický model numerický model řešení numerického
FOURIEROVA ANALÝZA 2D TERÉNNÍCH DAT Karel Segeth Motto: The faster the computer, the more important the speed of algorithms. přírodní jev fyzikální model matematický model numerický model řešení numerického
Jana Dannhoferová Ústav informatiky, PEF MZLU
 Počítačová grafika Křivky Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU Základní vlastnosti křivek křivka soustava parametrů nějaké rovnice, která je posléze generativně
Počítačová grafika Křivky Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU Základní vlastnosti křivek křivka soustava parametrů nějaké rovnice, která je posléze generativně
Výpočet průsečíků paprsku se scénou
 Výpočet průsečíků paprsku se scénou 1996-2008 Josef Pelikán, MFF UK Praha http://cgg.ms.mff.cuni.cz/~pepca/ Josef.Pelikan@mff.cuni.cz NPGR004, intersection.pdf 2008 Josef Pelikán, http://cgg.ms.mff.cuni.cz/~pepca
Výpočet průsečíků paprsku se scénou 1996-2008 Josef Pelikán, MFF UK Praha http://cgg.ms.mff.cuni.cz/~pepca/ Josef.Pelikan@mff.cuni.cz NPGR004, intersection.pdf 2008 Josef Pelikán, http://cgg.ms.mff.cuni.cz/~pepca
Lineární stabilita a teorie II. řádu
 Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 2015
 Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 05 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
Zadání a řešení testu z matematiky a zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia od podzimu 05 Zpráva o výsledcích přijímacího řízení do magisterského navazujícího studia
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB D24FZS
 OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ
 VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ Michal Kořenář 1 Abstrakt Rozvoj výpočetní techniky v poslední době umožnil také rozvoj výpočetních metod, které nejsou založeny na bázi
VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ Michal Kořenář 1 Abstrakt Rozvoj výpočetní techniky v poslední době umožnil také rozvoj výpočetních metod, které nejsou založeny na bázi
Obsah Obyčejné diferenciální rovnice
 Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Evoluční algoritmy. Podmínka zastavení počet iterací kvalita nejlepšího jedince v populaci změna kvality nejlepšího jedince mezi iteracemi
 Evoluční algoritmy Použítí evoluční principů, založených na metodách optimalizace funkcí a umělé inteligenci, pro hledání řešení nějaké úlohy. Populace množina jedinců, potenciálních řešení Fitness function
Evoluční algoritmy Použítí evoluční principů, založených na metodách optimalizace funkcí a umělé inteligenci, pro hledání řešení nějaké úlohy. Populace množina jedinců, potenciálních řešení Fitness function
Odhad stavu matematického modelu křižovatek
 Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Projekční algoritmus. Urychlení evolučních algoritmů pomocí regresních stromů a jejich zobecnění. Jan Klíma
 Urychlení evolučních algoritmů pomocí regresních stromů a jejich zobecnění Jan Klíma Obsah Motivace & cíle práce Evoluční algoritmy Náhradní modelování Stromové regresní metody Implementace a výsledky
Urychlení evolučních algoritmů pomocí regresních stromů a jejich zobecnění Jan Klíma Obsah Motivace & cíle práce Evoluční algoritmy Náhradní modelování Stromové regresní metody Implementace a výsledky
Numerické metody optimalizace - úvod
 Numerické metody optimalizace - úvod Petr Tichý 16. února 2015 1 Organizace přednášek a cvičení 13 přednášek a cvičení. Zápočet: úloha programování a testování úloh v Matlabu. Další informace na blogu
Numerické metody optimalizace - úvod Petr Tichý 16. února 2015 1 Organizace přednášek a cvičení 13 přednášek a cvičení. Zápočet: úloha programování a testování úloh v Matlabu. Další informace na blogu
Úlohy nejmenších čtverců
 Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Připomenutí co je to soustava lineárních rovnic
 Připomenutí co je to soustava lineárních rovnic Příklad 2x 3y + z = 5 3x + 5y + 2z = 4 x + 2y z = 1 Soustava lineárních rovnic obecně Maticový tvar: a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a
Připomenutí co je to soustava lineárních rovnic Příklad 2x 3y + z = 5 3x + 5y + 2z = 4 x + 2y z = 1 Soustava lineárních rovnic obecně Maticový tvar: a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a