9.1 Definice a rovnice kuželoseček
|
|
|
- Ivo Kučera
- před 6 lety
- Počet zobrazení:
Transkript
1 9. Kuželosečky a kvadriky 9.1 Definice a rovnice kuželoseček Kuželosečka - řez na kruhovém kuželi, množina bodů splňujících kvadratickou rovnici ve dvou proměnných. Elipsa parametricky: X(t) = (a cos t, b sin t), t < 0, 2π). Hyperbola parametricky: X(t) = ( a cos t, b tgt), t < 0, 2π), t π 2, 3π 2. 1
2 Kanonický tvar rovnice kuželosečky a 20 (x s x) 2 + a 02 (y s y) 2 + a 10 (x p x) + a 01 (y p y) = a 00, (1) kde a 00 = 1 nebo a 00 = 0 a s x, s y, p x, p y jsou koeficienty, které udávají posunutí kuželosečky. Převod rovnice kuželosečky (bez smíšeného členu) na kanonický tvar se provede pomocí tzv. doplnění kvadratických členů na úplný čtverec. Pro kanonický tvar rovnice kuželosečky navíc platí: 1. Alespoň jeden z koeficientů a 20, a 02 je nenulový. 2. Je-li a 20 0, pak a 10 = Je-li a 02 0, pak a 01 = Je-li a 10 0, pak a 00 = Je-li a 01 0, pak a 00 = Je-li a 00 = 0 a počet záporných koeficientů u kvadratických členů je větší než počet kladných koeficientů u kvadratických členů, vynásobíme rovnici číslem 1. 2
3 9.2 Klasifikace kuželoseček Úpravou rovnice kuželosečky na kanonický tvar minimalizujeme počet nenulových koeficientů v rovnici kuželosečky. Signaturou kuželosečky v kanonickém tvaru (1) rozumíme uspořádanou čtveřici čísel (k, z, l, j), kde k, resp. z, udává počet kvadratických členů s kladným, resp. záporným, koeficientem, l nabývá hodnoty 0 nebo 1 podle toho, zda po úpravě má rovnice kuželosečky nenulový koeficient u lineárního členu, j nabývá hodnoty 0 nebo 1 podle toho, které z těchto čísel obsahuje pravá strana upravené rovnice kuželosečky. Poznamenejme, že pro l = 1 je vždy j = 0 a pro j = 0 je k z. 3
4 Č. Název Signatura Rovnice Elipsa kružnice pro a = b (2,0,0,1) a 2 + y2 b 2 = 1 Hyperbola záměna proměnných (1,1,0,1) a 2 y2 b 2 = 1 Parabola záměna proměnných (1,0,1,0) ± 2py = Různoběžné přímky záměna proměnných (1,1,0,0) a 2 y2 b 2 = 0 Rovnoběžné přímky záměna proměnných (1,0,0,1) a 2 = 1 4
5 6. Totožné přímky záměna proměnných (1,0,0,0) = Bod záměna proměnných (2,0,0,0) a 2 + y2 b 2 = 0 Prázdná množina záměna proměnných (0,2,0,1) x2 a 2 y2 b 2 = 1 Prázdná množina záměna proměnných (0,1,0,1) x2 a 2 = 1 5
6 9.3 Definice a rovnice kvadrik Kvadrikou neboli plochou druhého stupně rozumíme plochu, kterou lze popsat rovnicí (indexy i, j, k u koeficientů a ijk jsou odvozeny z exponentů u x, y a z v daném členu) a 200 +a 020 y 2 +a 002 z 2 +2(a 110 xy+a 101 xz+a 011 yz)+2(a 100 x+a 010 y+a 001 z)+a 000 = 0, (2) kde alespoň jeden z koeficientů u členů druhého stupně (takových členů je šest) je nenulový. V maticovém tvaru lze psát (x, y, z, 1) a 200, a 110, a 101, a 100 a 110, a 020, a 011, a 010 a 101, a 011, a 002, a 001 a 100, a 010, a 001, a 000 x y z 1 = 0. (3) 6
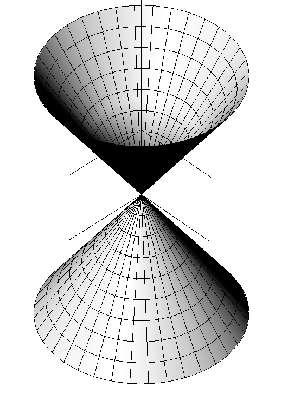
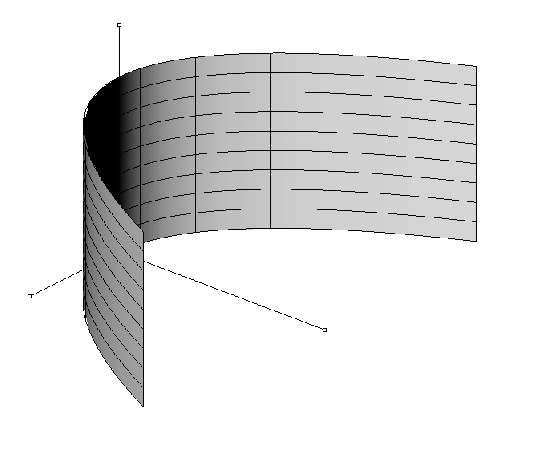
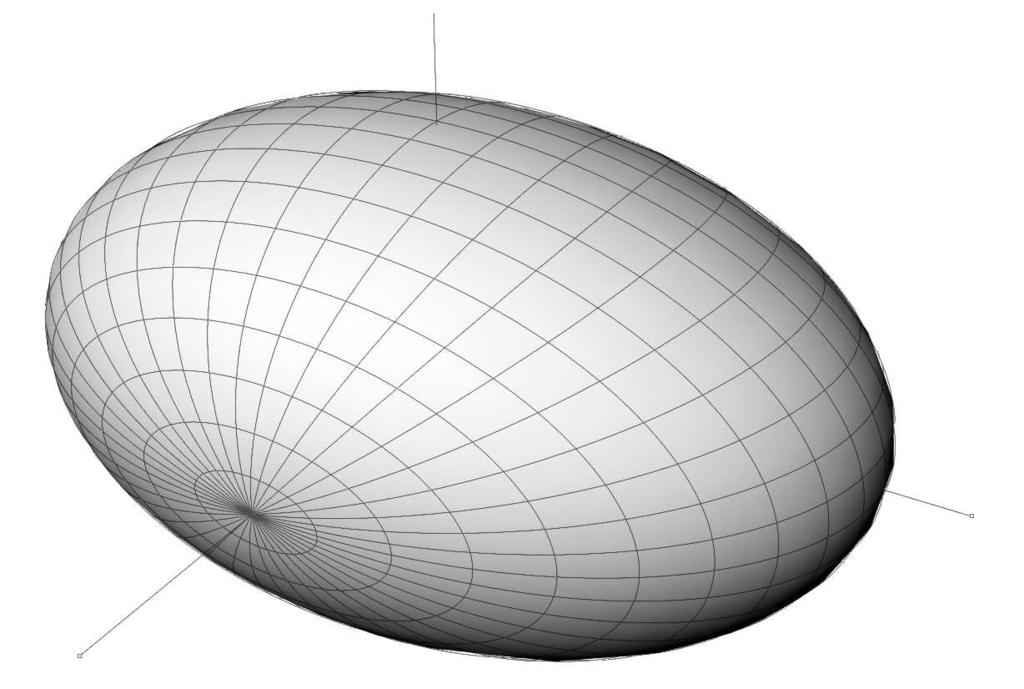
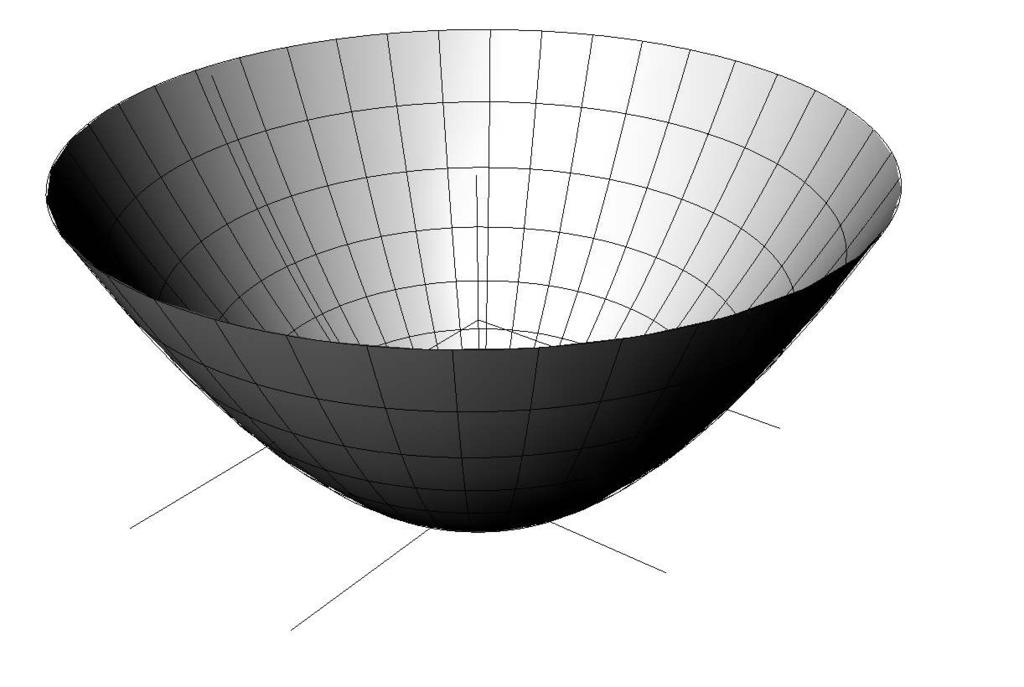
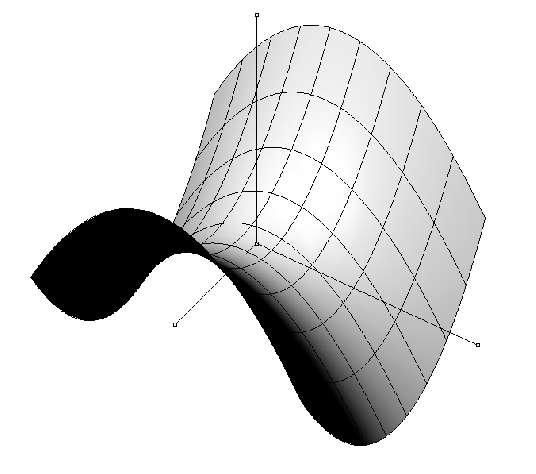
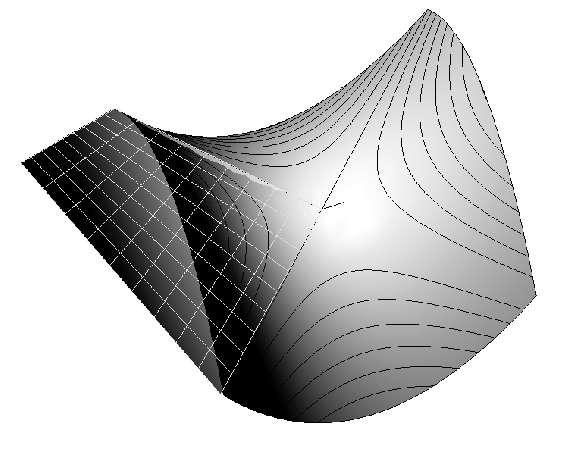
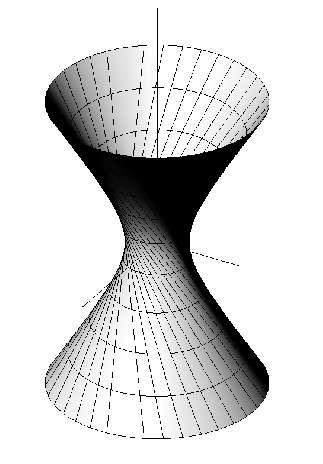
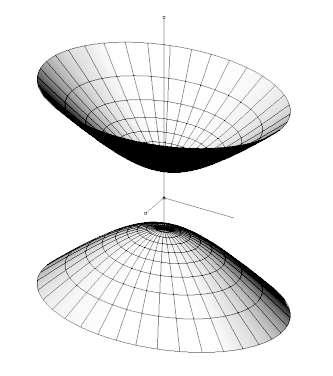
7 Pro regulární kvadriky platí, že matice koeficientů je regulární. Regulárními kvadrikami jsou: kulová plocha, elipsoid, eliptický paraboloid, hyperbolický paraboloid, jednodílný hyperboloid dvoudílný hyperboloid. Ze singulárních kvadrik uved me (kruhovou) kuželovou plochu, eliptickou válcovou plochu, parabolickou válcovou plochu, hyperbolickou válcovou plochu. 7

8 8

9 9
10 10
11 11
12 12
13 13
14 14
15 9.4 Klasifikace kvadrik Určení kanonického tvaru kvadriky pro případ nulových koeficientů u smíšených kvadratických členů v rovnici kvadriky provádíme analogickým postupem, jako v případě kuželoseček. Definice signatury kanonického tvaru rovnice kvadriky a kuželosečky je stejná. Kanonický tvar rovnice kvadriky neobsahuje více než jeden lineární člen (rovněž tato úprava se dosáhne pomocí transformace systému souřadnic). 15
16 Č. Název Signatura Rovnice 1. Elipsoid kulová plocha... a = b = c rotační elipsoid pro dvě čísla stejná (3,0,0,1) a 2+y2 b 2 +z2 c 2 = 1 2. Hyperboloid jednodílný rotační pro a = b (osa rotace z, cyklická záměna pro další osy) (2,1,0,1) a 2+y2 b 2 z2 c 2 = 1 3. Hyperboloid dvoudílný rotační pro... a = b (osa rotace z, cyklická záměna pro další osy) (1,2,0,1) x2 1 a 2 y2 b 2 +z2 c 2 = 16
17 4. Kuželová plocha rotační pro a = b (osa rotace z, cyklická záměna pro další osy) (2,1,0,0) a 2+y2 b 2 z2 c 2 = 0 5. Eliptický paraboloid p > 0, rotační pro a = b (osa rotace z, cyklická záměna pro další osy), znaménko určuje poloprostor z 0 nebo z 0, v němž plocha leží (2,0,1,0) a 2 + y2 b 2 ± z p = 0 6. Hyperbolický paraboloid p > 0, cyklická záměna proměnných pro další osy, znaménko určuje orientaci parabol v rovinách xz a yz (1,1,1,0) a 2 y2 b 2 ± z p = 0 17
18 Č. Název Signatura Rovnice 7. Eliptický válec rotační pro a = b (osa rotace z, cyklická záměna pro další osy) (2,0,0,1) a 2 + y2 b 2 = 1 8. Hyperbolický válec cyklická záměna pro další osy (1,1,0,1) a 2 y2 b 2 = 1 9. Parabolický válec p > 0, cyklická záměna pro další osy, znaménko určuje poloprostor y 0 nebo y 0, v němž plocha leží (1,0,1,0) a 2 ± y p = 0 18
19 10. Různoběžné roviny cyklická záměna proměnných (1,1,0,0) a 2 y2 b 2 = Rovnoběžné roviny cyklická záměna proměnných (1,0,0,1) a 2 = Totožné roviny záměna proměnných (1,0,0,0) = Bod počátek (3,0,0,0) a 2+y2 b 2 +z2 c 2 = 0 19
20 14. Přímka osa z cyklická záměna proměnných (2,0,0,0) a 2 + y2 b 2 = Prázdná množina případně záměna proměnných (0,3,0,1) (0,2,0,1) (0,1,0,1) x2 a 2 y2 b 2 z2 c 2 = 1 x2 a 2 y2 b 2 = 1 x2 a 2 = 1 20
21 9.5 Příklady Příklad 34. Stanovíme typ kvadriky dané rovnicí 4 8x + y 2 4y + z = 0 Příklad 35. prvky. Určete typ kvadriky 4y 2 + z 2 + x + 16y 3 = 0. Zjistěte její určující Příklad 36. Určete typ kvadriky 2 3y 2 8x + 12y + 10 = 0. 21
22 9.6 Kvadriky v obecné poloze Věta 19. Kuželosečka je určena pěti různými obecnými body. Důkaz: V obecné rovnici kuželosečky se vyskytuje 6 volitelných koeficientů. Vynásobení koeficientů nenulovou konstantou nemění hledanou množinu bodů (kuželosečku). Tedy jeden (nenulový) koeficient lze volit. Věta 20. Kvadrika je určena devíti různými obecnými body. Důkaz: V obecné rovnici kuželosečky se vyskytuje 10 volitelných koeficientů. Vynásobení koeficientů nenulovou konstantou nemění hledanou množinu bodů (kuželosečku). Tedy jeden (nenulový) koeficient lze volit. Věta 21. Věta 22. Signatura kvadriky (kuželosečky) je afinním invariantem. Typ kvadriky (kuželosečky) je afinním invariantem. Věta 23. Každou implicitní rovnici kvadriky (kuželosečky) lze pomocí afinní transformace převést na kanonický tvar. 22
23 Princip: určíme afinní transformaci souřadnicové soustavy, která eliminuje z rovnice kvadriky smíšené členy. Postup: Kvadriku (kuželosečku) popíšeme maticově tak, aby matice kuželosečky byla symetrická Z matice kvadriky uvažujeme afinní část A, která vznikne vynecháním posledního řádku a posledního sloupce matice. Pro matici A určíme její vlastní čísla λ 1, λ 2, λ 3 (pro kuželosečku jde o dvě čísla). Pokud chceme zjistit i polohu kvadriky, určíme odpovídající vlastní vektory a znormujeme je (budou tvořit ortonormální repér, v němž kvadriku vyjadřujeme). Lze navíc sestavit přímo transformační matici vlastní vektory jsou jejími řádky. Kvadrika má v nové souřadnicové soustavě vyjádření λ 1 + λ 2 ỹ 2 + λ 3 z 2 = ã 000. Pravá strana ã 000 nabývá hodnoty 0 nebo 1 a přenese se z původní rovnice kuželosečky. 23
24 Příklad 37. Určíme typ a základní charakteristiky kvadriky + 2xy 2xz = 1. Řešení: Maticově můžeme psát (x, y, z, 1) 1, 1, 1, 0 1, 0, 0, 0 1, 0, 0, 0 0, 0, 0, 1 x y z 1 = 0. Matice kvadriky je singulární, tedy půjde o singulární kvadriku. Určíme vlastní čísla A = 1, 1, 1 1, 0, 0 1, 0, 0. 24
25 Sestavíme determinant det(λi A) = λ 1, 1, 1 1, λ, 0 1, 0, λ a obdržíme rovnici tj. λ 2 (λ 1) λ λ = 0, λ(λ 2 + λ 2) = 0. Vlastní čísla matice A jsou λ 1 = 0, λ 2 = 1, λ 3 = 2. Kanonický tvar rovnice dané kvadriky po transformaci souřadnic je ỹ 2 +2 z 2 = ã Jde o hyperbolickou válcovou plochu. Příklad 38. Matice kvadriky má vlastní čísla λ 1 = 1, λ 2 = 1, λ 3 = 2. O jakou kvadriku jde? 25
1.13 Klasifikace kvadrik
 5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
KMA/G2 Geometrie 2 9. až 11. cvičení
 KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
Podrobnější výklad tématu naleznete ve studijním textu, na který je odkaz v Moodle. Tam je téma
 Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
vyjádřete ve tvaru lineární kombinace čtverců (lineární kombinace druhých mocnin). Rozhodněte o definitnosti kvadratické formy κ(x).
. Rozhodněte o definitnosti kvadratické formy κ(x).") Řešené příklady z lineární algebry - část 6 Typové příklady s řešením Příklad 6.: Kvadratickou formu κ(x) = x x 6x 6x x + 8x x 8x x vyjádřete ve tvaru lineární kombinace čtverců (lineární kombinace druhých
Řešené příklady z lineární algebry - část 6 Typové příklady s řešením Příklad 6.: Kvadratickou formu κ(x) = x x 6x 6x x + 8x x 8x x vyjádřete ve tvaru lineární kombinace čtverců (lineární kombinace druhých
Deg2-Kvadriky. Světlana Tomiczková
 KMA FAV ZČU Plzeň 18. března 2016 Kvadriky Rotační kvadriky singulární (vzniknou rotací singulární kuželosečky) a) rotační válcová plocha x2 + y2 = 1 a 2 a 2 b) rotační kuželová plocha x2 + y2 z2 = 0 a
KMA FAV ZČU Plzeň 18. března 2016 Kvadriky Rotační kvadriky singulární (vzniknou rotací singulární kuželosečky) a) rotační válcová plocha x2 + y2 = 1 a 2 a 2 b) rotační kuželová plocha x2 + y2 z2 = 0 a
Analytická geometrie v E 3 - kvadriky
 Analtická geometrie v E 3 - kvadrik ROVNICE KVADRIKY ( v ákladní a posunuté poloe) Kvadrik v ákladní poloe - střed nebo vrchol leží v počátku ( vi příloha na konci) Posunutí v rovnici nahradíme všechn
Analtická geometrie v E 3 - kvadrik ROVNICE KVADRIKY ( v ákladní a posunuté poloe) Kvadrik v ákladní poloe - střed nebo vrchol leží v počátku ( vi příloha na konci) Posunutí v rovnici nahradíme všechn
Analytická geometrie přímky, roviny (opakování středoškolské látky) = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,
 = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,") Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
SBÍRKA PŘÍKLADŮ NA KVADRATICKÉ PLOCHY
 Jihočeská univerzita v Českých Budějovicích Pedagogická fakulta Katedra matematiky Bakalářská práce SBÍRKA PŘÍKLADŮ NA KVADRATICKÉ PLOCHY Autor práce: Žaneta Mifková Vedoucí práce: prof. RNDr. Pavel Pech,
Jihočeská univerzita v Českých Budějovicích Pedagogická fakulta Katedra matematiky Bakalářská práce SBÍRKA PŘÍKLADŮ NA KVADRATICKÉ PLOCHY Autor práce: Žaneta Mifková Vedoucí práce: prof. RNDr. Pavel Pech,
KVADRATICKÉ PLOCHY a jejich reprezentace v programu Maple. Roman HAŠEK, Pavel PECH
 KVADRATICKÉ PLOCHY a jejich reprezentace v programu Maple Roman HAŠEK, Pavel PECH Jihočeská univerzita v Českých Budějovicích 1 Obsah Předmluva 4 1 Kvadriky jako plochy. stupně 9 1.1 Úvod.................................
KVADRATICKÉ PLOCHY a jejich reprezentace v programu Maple Roman HAŠEK, Pavel PECH Jihočeská univerzita v Českých Budějovicích 1 Obsah Předmluva 4 1 Kvadriky jako plochy. stupně 9 1.1 Úvod.................................
Základní vlastnosti ploch
 plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
na magisterský studijní obor Učitelství matematiky pro střední školy
 Datum:... Jméno:... Přijímací řízení pro akademický rok 203/4 na magisterský studijní obor Učitelství matematiky pro střední školy Písemná část přijímací zkoušky z matematiky Za každou správnou odpověd
Datum:... Jméno:... Přijímací řízení pro akademický rok 203/4 na magisterský studijní obor Učitelství matematiky pro střední školy Písemná část přijímací zkoušky z matematiky Za každou správnou odpověd
Klíčová slova Mongeovo promítání, kuželosečka, rotační plocha.
 Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Michal Zamboj. December 23, 2016
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Funkce dvou proměnných
 Funkce dvou proměnných Funkce dvou proměnných harmonická vlna Postupné příčné vlnění T=2, = 2 ( t, ) Asin t 2 Asin t T v t Asin 2 T Počátek koná harmonický pohb, ten se šíří dál řadou oscilátorů ve směru
Funkce dvou proměnných Funkce dvou proměnných harmonická vlna Postupné příčné vlnění T=2, = 2 ( t, ) Asin t 2 Asin t T v t Asin 2 T Počátek koná harmonický pohb, ten se šíří dál řadou oscilátorů ve směru
Michal Zamboj. January 4, 2018
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Definice Tečna paraboly je přímka, která má s parabolou jediný společný bod,
 5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].
![Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].](/thumbs/91/104981778.jpg "Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].") Konzultace č. 6: Rovnice kružnice, poloha přímky a kružnice Literatura: Matematika pro gymnázia: Analytická geometrie, kap. 5.1 a 5. Sbírka úloh z matematiky pro SOŠ a studijní obory SOU. část, kap. 6.1
Konzultace č. 6: Rovnice kružnice, poloha přímky a kružnice Literatura: Matematika pro gymnázia: Analytická geometrie, kap. 5.1 a 5. Sbírka úloh z matematiky pro SOŠ a studijní obory SOU. část, kap. 6.1
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Popis jednotlivých kvadrik
 Kapitola Popis jednotlivých kvadrik V této kapitole se budeme abývat některými kvadrikami podrobněji. Nejprve budeme uvažovat elipsoid a hperboloid, které patří do skupin regulárních středových kvadrik.
Kapitola Popis jednotlivých kvadrik V této kapitole se budeme abývat některými kvadrikami podrobněji. Nejprve budeme uvažovat elipsoid a hperboloid, které patří do skupin regulárních středových kvadrik.
3.4 Řešení Příkladu 1 (str.55) v programu Maple
 v programu Maple") 3.4. ŘEŠENÝ PŘÍKLAD 115 1 1 1 1 3 1 Obrázek 3.8: Část výsledné kuželové plochy 3.4 Řešení Příkladu 1 (str.55) v programu Maple Zadání: Vyšetřete kvadriku [], [5] 7x +6y +5z 4xy 4yz x +4y +z +3=. (3.1)
3.4. ŘEŠENÝ PŘÍKLAD 115 1 1 1 1 3 1 Obrázek 3.8: Část výsledné kuželové plochy 3.4 Řešení Příkladu 1 (str.55) v programu Maple Zadání: Vyšetřete kvadriku [], [5] 7x +6y +5z 4xy 4yz x +4y +z +3=. (3.1)
Linearní algebra příklady
 Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
3.2 3DgrafyvMaple 106 KAPITOLA 3. UŽITÍ MAPLE PŘI ŘEŠENÍ KVADRIK
 106 KAPITOLA 3. UŽITÍ MAPLE PŘI ŘEŠENÍ KVADRIK > A2:=augment(submatrix(A,1..3,[1]),b,submatrix(A,1..3,[3])); Potom vypočítáme hodnotu x 2 : > x2:=det(a2)/det(a); Zadání matice. Matici M typu (2, 3) zadáme
106 KAPITOLA 3. UŽITÍ MAPLE PŘI ŘEŠENÍ KVADRIK > A2:=augment(submatrix(A,1..3,[1]),b,submatrix(A,1..3,[3])); Potom vypočítáme hodnotu x 2 : > x2:=det(a2)/det(a); Zadání matice. Matici M typu (2, 3) zadáme
Geometrie pro FST 2. Plzeň, 28. srpna 2013, verze 6.0
 Geometrie pro FST 2 Pomocný učební text František Ježek, Světlana Tomiczková Plzeň, 28. srpna 2013, verze 6.0 Předmluva Tento pomocný text vznikl pro potřeby předmětu Geometrie pro FST 2, který vyučujeme
Geometrie pro FST 2 Pomocný učební text František Ježek, Světlana Tomiczková Plzeň, 28. srpna 2013, verze 6.0 Předmluva Tento pomocný text vznikl pro potřeby předmětu Geometrie pro FST 2, který vyučujeme
17 Kuželosečky a přímky
 17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH
 EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH ÚLOHY ŘEŠITELNÉ BEZ VĚTY O MULTIPLIKÁTORECH Nalezněte absolutní extrémy funkce f na množině M. 1. f(x y) = x + y; M = {x y R 2 ; x 2 + y 2 1} 2. f(x y) = e x ; M = {x y R
EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH ÚLOHY ŘEŠITELNÉ BEZ VĚTY O MULTIPLIKÁTORECH Nalezněte absolutní extrémy funkce f na množině M. 1. f(x y) = x + y; M = {x y R 2 ; x 2 + y 2 1} 2. f(x y) = e x ; M = {x y R
x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.
![x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.](/thumbs/83/87395437.jpg "x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.") 1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
21. Úvod do teorie parciálních diferenciálních rovnic
 21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].
![obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].](/thumbs/59/44051949.jpg "obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].") Kružnice množina bodů, které mají od středu stejnou vzdálenost pojmy: bod na kružnici X [x, y]; poloměr kružnice r pro střed S[0; 0]: SX =r x 0 2 y 0 2 =r x 2 y 2 =r 2 pro střed S[m; n]: SX =r x m 2 y
Kružnice množina bodů, které mají od středu stejnou vzdálenost pojmy: bod na kružnici X [x, y]; poloměr kružnice r pro střed S[0; 0]: SX =r x 0 2 y 0 2 =r x 2 y 2 =r 2 pro střed S[m; n]: SX =r x m 2 y
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Soustava m lineárních rovnic o n neznámých je systém
 1 1.2. Soustavy lineárních rovnic Soustava lineárních rovnic Soustava m lineárních rovnic o n neznámých je systém a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2...
1 1.2. Soustavy lineárních rovnic Soustava lineárních rovnic Soustava m lineárních rovnic o n neznámých je systém a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2...
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]
![AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]](/thumbs/93/113072660.jpg "AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]") 1. část 1. (u 1, u 2, u, u 4 ) je kladná báze orientovaného vektorového prostoru V 4. Rozhodněte, zda vektory (u, 2u 1 + u 4, u 4 u, u 2 ) tvoří kladnou, resp. zápornou bázi V 4. 0 2 0 0 0 0 0 1 0 2 0
1. část 1. (u 1, u 2, u, u 4 ) je kladná báze orientovaného vektorového prostoru V 4. Rozhodněte, zda vektory (u, 2u 1 + u 4, u 4 u, u 2 ) tvoří kladnou, resp. zápornou bázi V 4. 0 2 0 0 0 0 0 1 0 2 0
3.6. ANALYTICKÁ GEOMETRIE PARABOLY
 3.6. ANALYTICKÁ GEOMETRIE PARABOLY V této kapitole se dozvíte: jak je geometricky definována kuželosečka zvaná parabola; co je to ohnisko, řídící přímka, vrchol, osa, parametr paraboly; tvar vrcholové
3.6. ANALYTICKÁ GEOMETRIE PARABOLY V této kapitole se dozvíte: jak je geometricky definována kuželosečka zvaná parabola; co je to ohnisko, řídící přímka, vrchol, osa, parametr paraboly; tvar vrcholové
37. PARABOLA V ANALYTICKÉ GEOMETRII
 37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Konstruktivní geometrie
 Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
EUKLIDOVSKÉ PROSTORY
 EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
Klasické třídy ploch
 Klasické třídy ploch Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Klasické třídy ploch klasické plochy jsou často generovány kinematicky, a to pohybem tvořicí křivky takto např. vznikají
Klasické třídy ploch Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Klasické třídy ploch klasické plochy jsou často generovány kinematicky, a to pohybem tvořicí křivky takto např. vznikají
Základy analytické geometrie. II
 Základy analytické geometrie. II Přehled pojmů In: Eduard Čech (author): Základy analytické geometrie. II. (Czech). Praha: Přírodovědecké vydavatelství, 1952. pp. 213 219. Persistent URL: http://dml.cz/dmlcz/402541
Základy analytické geometrie. II Přehled pojmů In: Eduard Čech (author): Základy analytické geometrie. II. (Czech). Praha: Přírodovědecké vydavatelství, 1952. pp. 213 219. Persistent URL: http://dml.cz/dmlcz/402541
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Gymnázium Jiřího Ortena, Kutná Hora. Průřezová témata Poznámky. Téma Školní výstupy Učivo (pojmy) volné rovnoběžné promítání průmětna
 volné rovnoběžné promítání průmětna") Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ
 VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ Dvě přímky v rovině mohou být: různoběžné - mají jediný společný bod, rovnoběžné různé - nemají společný bod, totožné - mají nekonečně mnoho společných bodů. ŘEŠENÉ
VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ Dvě přímky v rovině mohou být: různoběžné - mají jediný společný bod, rovnoběžné různé - nemají společný bod, totožné - mají nekonečně mnoho společných bodů. ŘEŠENÉ
Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr
 Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
Diferenciáln. lní geometrie ploch
 Diferenciáln lní geometrie ploch Vjádřen ení ploch Eplicitní: z = f(,) ; [,] Ω z Implicitní: F(,,z)=0 + + z = r z = sin 0, π ; 0,1 Implicitní ploch bloob objects,, meta balls Izoploch: F(,,z)=konst. Implicitní
Diferenciáln lní geometrie ploch Vjádřen ení ploch Eplicitní: z = f(,) ; [,] Ω z Implicitní: F(,,z)=0 + + z = r z = sin 0, π ; 0,1 Implicitní ploch bloob objects,, meta balls Izoploch: F(,,z)=konst. Implicitní
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe.
 4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
DERIVACE. ln 7. Urči, kdy funkce roste a klesá a dále kdy je konkávní a
 DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
Vektorové prostory R ( n 1,2,3)
") n Vektorové prostory R ( n 1,2,) (Velikonoční doplněk ke cvičení LAG) Prvky kartézské mocniny R RR R jsou uspořádané trojice reálných čísel, které spolu s operacemi ( a1, a2, a) ( b1, b2, b) ( a1b1, a2
n Vektorové prostory R ( n 1,2,) (Velikonoční doplněk ke cvičení LAG) Prvky kartézské mocniny R RR R jsou uspořádané trojice reálných čísel, které spolu s operacemi ( a1, a2, a) ( b1, b2, b) ( a1b1, a2
6 Samodružné body a směry afinity
 6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ANOTACE nově vytvořených/inovovaných materiálů
 ANOTACE nově vytvořených/inovovaných materiálů Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast CZ.1.07/1.5.00/34.1017 III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Analytická
ANOTACE nově vytvořených/inovovaných materiálů Číslo projektu Číslo a název šablony klíčové aktivity Tematická oblast CZ.1.07/1.5.00/34.1017 III/2 - Inovace a zkvalitnění výuky prostřednictvím ICT Analytická
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
0 x 12. x 12. strana Mongeovo promítání - polohové úlohy.
 strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
ROTAČNÍ KVADRIKY. Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou
 ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 2. Pomocný učební text - díl II
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 2 Pomocný učební text - díl II František Ježek, Světlana Tomiczková Plzeň 7. února 2006 verze 2.0 Obsah 7 Obalové
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 2 Pomocný učební text - díl II František Ježek, Světlana Tomiczková Plzeň 7. února 2006 verze 2.0 Obsah 7 Obalové
LINEÁRNÍ ALGEBRA A GEOMETRIE III. Doc. RNDr. Martin Čadek, CSc.
 LINEÁRNÍ ALGEBRA A GEOMETRIE III. Doc. RNDr. Martin Čadek, CSc. Obsah Úvod 1 Sylabus přednášky 2 1. Afinní a projektivní prostory 3 2. Nadkvadriky v afinním a projektivním prostoru 11 3. Metrické vlastnosti
LINEÁRNÍ ALGEBRA A GEOMETRIE III. Doc. RNDr. Martin Čadek, CSc. Obsah Úvod 1 Sylabus přednášky 2 1. Afinní a projektivní prostory 3 2. Nadkvadriky v afinním a projektivním prostoru 11 3. Metrické vlastnosti
VIDEOSBÍRKA DERIVACE
 VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x. Zderivuj funkci y = e sin2 (x 2 ). Zderivuj funkci y = x +2x 2 +sin x x 5. Zderivuj funkci y = cos2
VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x. Zderivuj funkci y = e sin2 (x 2 ). Zderivuj funkci y = x +2x 2 +sin x x 5. Zderivuj funkci y = cos2
Matematická analýza III.
 3. Implicitní funkce Miroslav Hušek, Lucie Loukotová UJEP 2010 V této kapitole se seznámíme s dalším možným zadáním funkce jejím implicitním vyjádřením. Doplní tak nám již známé explicitní a parametrické
3. Implicitní funkce Miroslav Hušek, Lucie Loukotová UJEP 2010 V této kapitole se seznámíme s dalším možným zadáním funkce jejím implicitním vyjádřením. Doplní tak nám již známé explicitní a parametrické
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Řešíme tedy soustavu dvou rovnic o dvou neznámých. 2a + b = 3, 6a + b = 27,
 Přijímací řízení 2015/16 Přírodovědecká fakulta Ostravská univerzita v Ostravě Navazující magisterské studium, obor Aplikovaná matematika (1. červen 2016) Příklad 1 Určete taková a, b R, aby funkce f()
Přijímací řízení 2015/16 Přírodovědecká fakulta Ostravská univerzita v Ostravě Navazující magisterské studium, obor Aplikovaná matematika (1. červen 2016) Příklad 1 Určete taková a, b R, aby funkce f()
y 10 20 Obrázek 1.26: Průměrová rovina válcové plochy
 36 KAPITOLA 1. KVADRIKY JAKO PLOCHY 2. STUPNĚ 2 1 2 1 1 y 1 2 Obráek 1.26: Průměrová rovina válcové plochy Věta: Je-li definována průměrová rovina sdružená s asymptotickým směrem, potom je s tímto směrem
36 KAPITOLA 1. KVADRIKY JAKO PLOCHY 2. STUPNĚ 2 1 2 1 1 y 1 2 Obráek 1.26: Průměrová rovina válcové plochy Věta: Je-li definována průměrová rovina sdružená s asymptotickým směrem, potom je s tímto směrem
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura:
 8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
Vlastní (charakteristická) čísla a vlastní (charakteristické) Pro zadanou čtvercovou matici A budeme řešit maticovou
 čísla a vlastní (charakteristické) Pro zadanou čtvercovou matici A budeme řešit maticovou") 1 Vlastní (charakteristická) čísla a vlastní (charakteristické) vektory matice Pro zadanou čtvercovou matici A budeme řešit maticovou rovnici A x = λ x, kde x je neznámá matice o jednom sloupci (sloupcový
1 Vlastní (charakteristická) čísla a vlastní (charakteristické) vektory matice Pro zadanou čtvercovou matici A budeme řešit maticovou rovnici A x = λ x, kde x je neznámá matice o jednom sloupci (sloupcový
Další plochy technické praxe
 Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
PŘÍKLADY K MATEMATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY. x 2. 3+y 2
 PŘÍKLADY K ATEATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY ZDENĚK ŠIBRAVA.. Dvojné integrály.. Vícenásobné intergrály Příklad.. Vypočítejme dvojný integrál x 3 + y da, kde =, 3,. Řešení: Funkce f(x, y) = x je na obdélníku
PŘÍKLADY K ATEATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY ZDENĚK ŠIBRAVA.. Dvojné integrály.. Vícenásobné intergrály Příklad.. Vypočítejme dvojný integrál x 3 + y da, kde =, 3,. Řešení: Funkce f(x, y) = x je na obdélníku
Šroubovice... 5 Šroubové plochy Stanovte paprsek tak, aby procházel bodem A a po odrazu na rovině ρ procházel bodem
 Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Rovnice přímky v prostoru
 Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
Otázku, kterými body prochází větev implicitní funkce řeší následující věta.
 1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
Uzavřené a otevřené množiny
 Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
KMA/G1 GEOMETRIE 1 Pomocn y uˇ cebn ı text Miroslav L aviˇ cka Plzeˇ n, z aˇ r ı 2008
 KMA/G1 GEOMETRIE 1 Pomocný učební text Miroslav Lávička Plzeň, září 2008 KMA/G1 Geometrie 1 2 Předmluva Tento text vznikl jako pomocný učební materiál pro potřeby studentů Fakulty aplikovaných věd a Fakulty
KMA/G1 GEOMETRIE 1 Pomocný učební text Miroslav Lávička Plzeň, září 2008 KMA/G1 Geometrie 1 2 Předmluva Tento text vznikl jako pomocný učební materiál pro potřeby studentů Fakulty aplikovaných věd a Fakulty
Základy maticového počtu Matice, determinant, definitnost
 Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
VZÁJEMNÁ POLOHA DVOU PŘÍMEK
 VZÁJEMNÁ POLOHA DVOU PŘÍMEK VZÁJEMNÁ POLOHA DVOU PŘÍMEK p: a x b y c 0 q: a x b y c 0 ROVNOBĚŽNÉ PŘÍMKY (RŮZNÉ) nemají žádný společný bod, můžeme určit jejich vzdálenost, jejich odchylka je 0. Normálové
VZÁJEMNÁ POLOHA DVOU PŘÍMEK VZÁJEMNÁ POLOHA DVOU PŘÍMEK p: a x b y c 0 q: a x b y c 0 ROVNOBĚŽNÉ PŘÍMKY (RŮZNÉ) nemají žádný společný bod, můžeme určit jejich vzdálenost, jejich odchylka je 0. Normálové
2.6. VLASTNÍ ČÍSLA A VEKTORY MATIC
 .6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
.6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
Gymnázium Jiřího Ortena, Kutná Hora. volné rovnoběžné promítání průmětna
 Předmět: Matematika Náplň: Stereometrie, Analytická geometrie, Komplexní čísla Třída: 3. ročník Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor Volné rovnoběžné promítání Zobrazí ve volném rovnoběžném
Předmět: Matematika Náplň: Stereometrie, Analytická geometrie, Komplexní čísla Třída: 3. ročník Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor Volné rovnoběžné promítání Zobrazí ve volném rovnoběžném
Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr
 Geometrické transformace v rovině Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace shodné transformace (shodnosti, izometrie) převádějí objekt
Geometrické transformace v rovině Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace shodné transformace (shodnosti, izometrie) převádějí objekt
1.6 Singulární kvadriky
 22 KAPITOLA 1. KVADRIKY JAKO PLOCHY 2. STUPNĚ neboť B = C =. Z rovnice (1.34) plne, že přímka, procháející singulárním bodem kvadrik má s kvadrikou společný poue tento singulární bod (je-li A ) nebo celá
22 KAPITOLA 1. KVADRIKY JAKO PLOCHY 2. STUPNĚ neboť B = C =. Z rovnice (1.34) plne, že přímka, procháející singulárním bodem kvadrik má s kvadrikou společný poue tento singulární bod (je-li A ) nebo celá
Základy matematiky pro FEK
 Základy matematiky pro FEK 2. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 20 Co nás dneska čeká... Závislé a nezávislé
Základy matematiky pro FEK 2. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 20 Co nás dneska čeká... Závislé a nezávislé
VIDEOSBÍRKA DERIVACE
 VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos 3x 3. Zderivuj funkci y = 3 e sin2 (x 2 ). Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y
VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos 3x 3. Zderivuj funkci y = 3 e sin2 (x 2 ). Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Nelineární optimalizace a numerické metody (MI NON)
") Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Diferenciální geometrie
 Diferenciální geometrie Pomocný učební text díl I. František Ježek Plzeň, červen 2005 Obsah 1 Křivky 4 1.1 Vyjádření křivky......................... 4 1.2 Transformace parametru..................... 5
Diferenciální geometrie Pomocný učební text díl I. František Ježek Plzeň, červen 2005 Obsah 1 Křivky 4 1.1 Vyjádření křivky......................... 4 1.2 Transformace parametru..................... 5
MATEMATIKA II - vybrané úlohy ze zkoušek v letech
 MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
Definice globální minimum (absolutní minimum) v bodě A D f, jestliže X D f
 v bodě A D f, jestliže X D f") Výklad Globální extrémy mají stejný význam jako u funkcí jedné proměnné. Hledáme je bud na celém definičním oboru dané funkce, nebo na předem zadané podmnožině definičního oboru. Definice 6..1. Řekneme,
Výklad Globální extrémy mají stejný význam jako u funkcí jedné proměnné. Hledáme je bud na celém definičním oboru dané funkce, nebo na předem zadané podmnožině definičního oboru. Definice 6..1. Řekneme,
Drsná matematika III 3. přednáška Funkce více proměnných: Inverzní a implicitně definovaná zobrazení, vázané extrémy
 Drsná matematika III 3. přednáška Funkce více proměnných: Inverzní a implicitně definovaná zobrazení, vázané extrémy Jan Slovák Masarykova univerzita Fakulta informatiky 3. 10. 2011 Obsah přednášky 1 Literatura
Drsná matematika III 3. přednáška Funkce více proměnných: Inverzní a implicitně definovaná zobrazení, vázané extrémy Jan Slovák Masarykova univerzita Fakulta informatiky 3. 10. 2011 Obsah přednášky 1 Literatura
Základní vlastnosti eukleidovského prostoru
 Kapitola 2 Základní vlastnosti eukleidovského prostoru 2.1 Eukleidovský prostor Eukleidovský prostor a jeho podprostory. Metrické vlastnosti, jako např. kolmost, odchylka, vzdálenost, obsah, objem apod.
Kapitola 2 Základní vlastnosti eukleidovského prostoru 2.1 Eukleidovský prostor Eukleidovský prostor a jeho podprostory. Metrické vlastnosti, jako např. kolmost, odchylka, vzdálenost, obsah, objem apod.
Matematika B101MA1, B101MA2
 Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
IB112 Základy matematiky
 IB112 Základy matematiky Řešení soustavy lineárních rovnic, matice, vektory Jan Strejček IB112 Základy matematiky: Řešení soustavy lineárních rovnic, matice, vektory 2/53 Obsah Soustava lineárních rovnic
IB112 Základy matematiky Řešení soustavy lineárních rovnic, matice, vektory Jan Strejček IB112 Základy matematiky: Řešení soustavy lineárních rovnic, matice, vektory 2/53 Obsah Soustava lineárních rovnic
9 Kolmost vektorových podprostorů
 9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u