Tlumené a vynucené kmity
|
|
|
- Martina Tomanová
- před 9 lety
- Počet zobrazení:
Transkript
1 Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti

2 Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností transformace, zformulujte závě ry. najdět ě obrazy následujících funkcí a rovnic bez použití tabulek obraz ů a Parametry A, a, b, ω, μ, Ω nezávisí na čase, apostrofem je značena derivace podle č asu. Funkce označ uje jednotkový skok v bod ě c: f(t)= 1 f(t)= 1 = g(t)=a f(t)

3 g(t)=f' (t) ; f(0)=a g(t)=f'' (t)=h' (t);f' (t)=h (t) ; f(0)=a; f'(0)=b ; f(0)=a; f'(0)=0 g(t)= g(t)= g(t)= g(t)= g(t)= ; f(0)=0; f'(0)=b ; f(0)=a; f'(0)=b ; f(0)=a; f'(0)=0 ; f(0)=0; f'(0)=b ; f(0)=a; f'(0)=b
=b ; f(0)=a; f'(0)=0 ; f(0)=0; f'(0)=b ;")
4 Problémová úloha 2: Harmonický oscilátor Pomocí Laplaceovy transformace najděte obecné ř ešení diferenciální rovnice popisující harmonický oscilátor Pomocí obecného řešení najděte konkrétní řešení pro následující počáteční podmínky: Zformulujte závěry.

5 Problémová úloha 3: Tlumený lineární oscilátor Pomocí Laplaceovy transformace najděte obecné ř ešení diferenciální rovnice popisující tlumený lineární oscilátor Zobrazte grafy pro rů zné hodnoty a, b, μ, ω

6 Problémová úloha 4: Vynucené kmity Pomocí Laplaceovy transformace najdě te obraz diferenciální rovnice popisující sinusodiáln ě buzený tlumený lineární oscilátor Seznamte se s obecným řešením a sestrojte reznanční křivku pro amplitudu vynuceného kmitání

7 Harmonický oscilátor - kontola Tranformujeme nejprve levou stranu rovnice Dosadíme do rovnice za obraz proměnnou Y a počáteční podmínky, vzniklou rovnici vyřešíme pro Y Zpětnou transformací nalezneme řešení diferenciální rovnice v obecném tvaru: Všimněte si, že čitatel výrazu odráží počáteční podmínky a jmenovatel odráží diferencíální rovnici. (Ve jmneovateli je charakteristická rovnice.)

8 Harmonický oscilátor - kontola Správnost Vašeho dosazení počátečních podmínek zkontrolujte porovnáním s analytickým řešením diferenciálních rovnic:

9 Tlumený lineární oscilátor - kontola Tranformujeme nejprve levou stranu rovnice Dosadíme do rovnice za obraz proměnnou Y a počáteční podmínky, vzniklou rovnici vyřešíme pro Y Povšimněte si, že i zde je ve jmenovateli charakteristická rovnice a tvar čitatele je nastavován počátečními podmínkami.

10

11 Tlumený lineární oscilátor - kontola Pokud je μ>ω, můžeme jmenovatel zapsat ve tvaru obecném tvaru: a zpětnou transformací nalezneme řešení diferenciální rovnice v Pokud je μ<ω, můžeme jmenovatel zapsat ve tvaru obecném tvaru: a zpětnou transformací nalezneme řešení diferenciální rovnice v Pokud je μ=ω, můžeme pro kritické tlumení jmenovatel zapsat ve tvaru rovnice v obecném tvaru: a zpětnou transformací nalezneme řešení diferenciální

12
13 Tlumený lineární oscilátor - kontrola Výsledky porovnáme s analytickým řešením Povšimněte si, že toto řešení nepředpokládá rovnost μ = ω. Zapíšeme rovnici pro kritické tlumení Pro podkritické tlumení budeme předpokládat, že μ = 2, ω = 3 Pro nadkritické tlumení budeme předpokládat, že μ = 4, ω = 3

14 Tlumený lineární oscilátor - grafické vyjádření Pro vykreslení grafu můžeme použít vyjádření v podobě harmonických funkcí vynásobených exponencielou

15
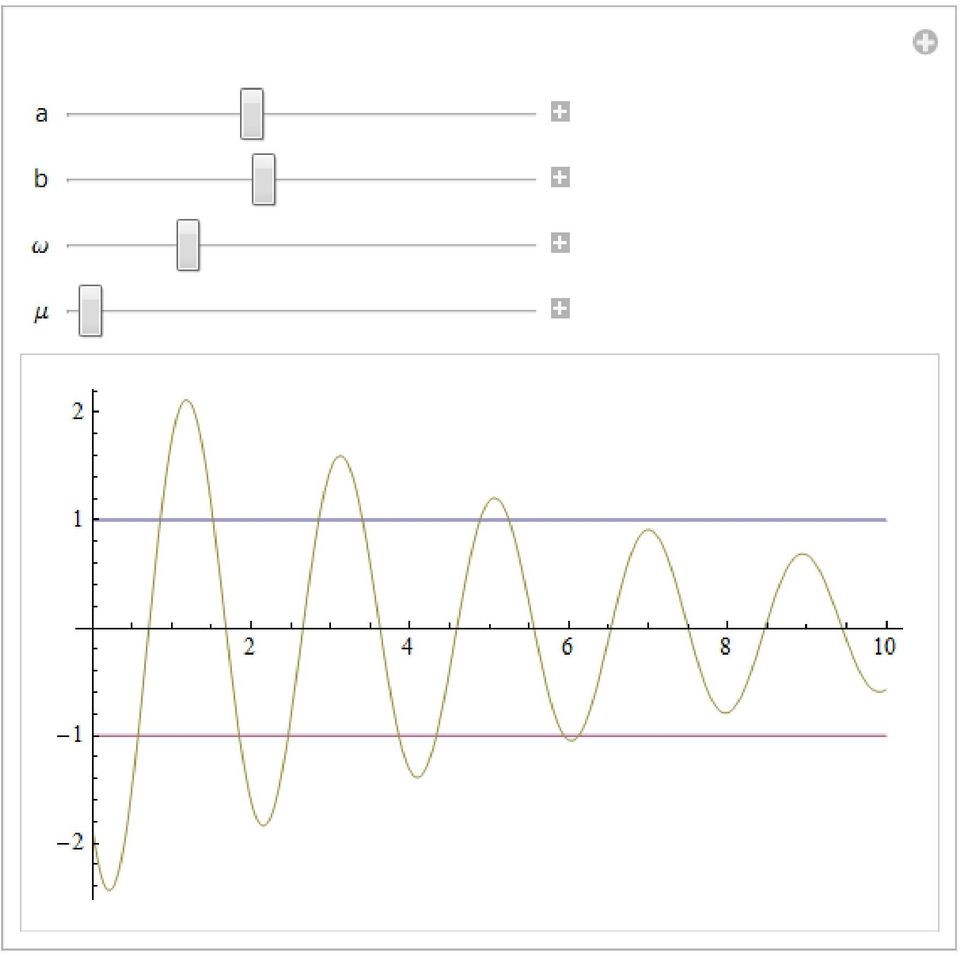
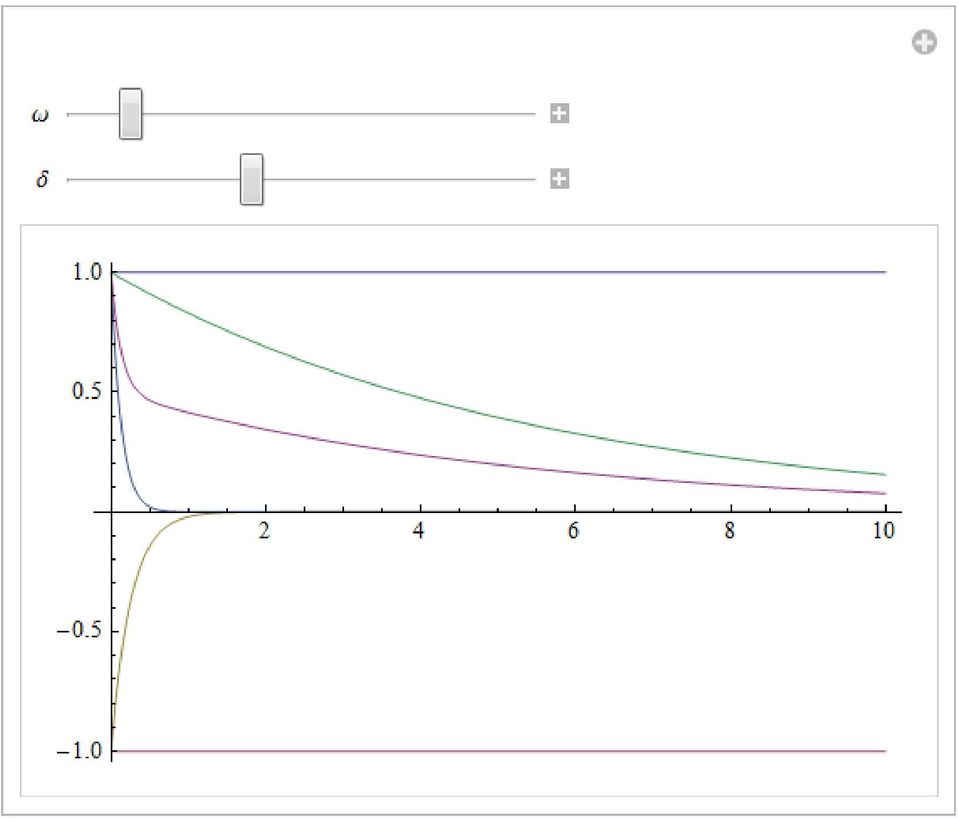
16 Tlumený lineární oscilátor - grafické vyjádření Zápis pomocí komplexnich exponenciel umožní lépe pochopit, proč se při kritickém tlumení systém nejrychleji přiblíží k nule bez překmitu.

17
18 Vynucené kmity - kontrola Tranformujeme nejprve levou stranu rovnice Tranformujeme pravou stranu rovnice A sin(ω t) Dosadíme do rovnice za obraz proměnnou Y a počáteční podmínky, vzniklou rovnici vyřešíme pro Y Zpětnou transformací tohoto výrazu bychom dostali komplexní výraz, který by podobně jako v případě tlumeného lineárního oscilátoru bylo obtížné interpretovat.

19 Vynucené kmity - kontrola Pro jednoduchost zvolíme nulové počáteční podmínky. Tento výsledek je možné zapsat ve tvaru součtu dvou zlomků +, kde K, L, M a N jsou konstanty závislé na Ω, μ a ω. Originál zlomku odpovídá lineární kombinaci výrazu, originál zlomku odpovídá řešení tlumeného harmonického oscilátoru.

20 Zjednodušme situaci předpokladem μ = a najděme originál: Všimněte si, že přechodový děj, popsaný členem obecně vzniká i při nenulových počátečních podmínkách. Stejná dvě řešení, přechodový děj a vynucené kmity s frekvencí buzení se nám objeví i při nenulových počátečních podmínkách.

21 Vynucené kmity - analytické řešení Řešme obecně rovnici vynucených kmitů : Poslední dva členy popisují přechodový děj. Všimněte si, že ustálené kmity nejsou ovlivněny počátečními podmínkami vyjádřenými integračními konstantami a. Ustálené kmity popisuje výraz Zjednodušme nejprve jmenovatel výrazu:
22 Poté najdeme amplitudu výsledných kmitů: Nakonec najdeme maximum amplitudy z podmínky
23 Vynucené kmity - rezonance amplitudy
24 Created with Wolfram Mathematica 8.0
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Diferenciální rovnice 1
 Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
FYZIKA II. Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy
 Elektromagnetické kmity a střídavé proudy") FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
FYZIKA II Petr Praus 9. Přednáška Elektromagnetická indukce (pokračování) Elektromagnetické kmity a střídavé proudy Osnova přednášky Energie magnetického pole v cívce Vzájemná indukčnost Kvazistacionární
9.3. Úplná lineární rovnice s konstantními koeficienty
 Úplná lineární rovnice s konstantními koeficienty Cíle Nyní přejdeme k řešení úplné lineární rovnice druhého řádu. I v tomto případě si nejprve ujasníme, v jakém tvaru můžeme očekávat řešení, poté se zaměříme
Úplná lineární rovnice s konstantními koeficienty Cíle Nyní přejdeme k řešení úplné lineární rovnice druhého řádu. I v tomto případě si nejprve ujasníme, v jakém tvaru můžeme očekávat řešení, poté se zaměříme
Harmonický pohyb tělesa na pružině
 EVROPSKÝ SOCIÁLNÍ FOND Harmonický pohyb tělesa na pružině PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky Posílení vazby teoretických
EVROPSKÝ SOCIÁLNÍ FOND Harmonický pohyb tělesa na pružině PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky Posílení vazby teoretických
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)
![Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)](/thumbs/96/128965676.jpg "Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)") 1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Lineární funkce, rovnice a nerovnice 3 Soustavy lineárních rovnic
 Lineární funkce, rovnice a nerovnice Soustavy lineárních rovnic motivace Využívají se napřklad při analytickém vyšetřování vzájemné polohy dvou přímek v rovině a prostoru. Při řešení některých slovních
Lineární funkce, rovnice a nerovnice Soustavy lineárních rovnic motivace Využívají se napřklad při analytickém vyšetřování vzájemné polohy dvou přímek v rovině a prostoru. Při řešení některých slovních
4.1 Řešení základních typů diferenciálních rovnic 1.řádu
 4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu
![1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu](/thumbs/102/155926571.jpg "1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu") [M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
[M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Nejjednodušší, tzv. bang-bang regulace
 Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Regulace a ovládání Regulace soustavy S se od ovládání liší přítomností zpětné vazby, která dává informaci o stavu soustavy regulátoru R, který podle toho upravuje akční zásah do soustavy, aby bylo dosaženo
Kmitání tělesa s danou budicí frekvencí
 EVROPSKÝ SOCIÁLNÍ FOND Kmiání ělesa s danou budicí frekvencí PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení echnické v Praze, Fakula savební, Kaedra maemaiky Posílení vazby eoreických předměů
EVROPSKÝ SOCIÁLNÍ FOND Kmiání ělesa s danou budicí frekvencí PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení echnické v Praze, Fakula savební, Kaedra maemaiky Posílení vazby eoreických předměů
Fyzikální praktikum 1
 Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
Fyzikální praktikum 1 FJFI ČVUT v Praze Úloha: #10 Lineární harmonický oscilátor a Pohlovo kyvadlo Jméno: Ondřej Finke Datum měření: 10.11.2014 Kruh: FE Skupina: 4 Klasifikace: 1. Pracovní úkoly (a) Změřte
Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: =, 0 = 1 = 1. ln = +,
 a řešení Cauchyho úlohy: =, 0 = 1 = 1. ln = +,") Příklad Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: a) =, 0= b) =, = c) =2, = d) =2, 0= e) =, 0= f) 2 =0, = g) + =0, h) =, = 2 = i) =, 0= j) sin+cos=0,
Příklad Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: a) =, 0= b) =, = c) =2, = d) =2, 0= e) =, 0= f) 2 =0, = g) + =0, h) =, = 2 = i) =, 0= j) sin+cos=0,
Q(y) dy = P(x) dx + C.
 dy = P(x) dx + C.") Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
Lineární diferenciální rovnice 1. řádu verze 1.1
 Úvod Lineární diferenciální rovnice. řádu verze. Následující tet popisuje řešení lineárních diferenciálních rovnic. řádu. Měl by sloužit především studentům předmětu MATEMAT2 na Univerzitě Hradec Králové
Úvod Lineární diferenciální rovnice. řádu verze. Následující tet popisuje řešení lineárních diferenciálních rovnic. řádu. Měl by sloužit především studentům předmětu MATEMAT2 na Univerzitě Hradec Králové
Matematicky se přímá Laplaceova transformace definuje jako: Zpětná Laplaceova transformace je definována jako:
 1. OBRAZOVÝ PŘENOS Chování dynamických systémů se běžně popisuje pomocí diferenciálních rovnic. S takovým popisem jste se často setkávali v rámcích jiných předmětů. Když ale chceme analyzovat dynamické
1. OBRAZOVÝ PŘENOS Chování dynamických systémů se běžně popisuje pomocí diferenciálních rovnic. S takovým popisem jste se často setkávali v rámcích jiných předmětů. Když ale chceme analyzovat dynamické
Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1
 okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1") ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
y = 1 x (y2 y), dy dx = 1 x (y2 y) dy y 2 = dx dy y 2 y y(y 4) = A y + B 5 = A(y 1) + By, tj. A = 1, B = 1. dy y 1
, dy dx = 1 x (y2 y) dy y 2 = dx dy y 2 y y(y 4) = A y + B 5 = A(y 1) + By, tj. A = 1, B = 1. dy y 1") ODR - řešené příkla 20 5 ANALYTICKÉ A NUMERICKÉ METODY ŘEŠENÍ ODR A. Analtické meto řešení Vzorové příkla: 5.. Příklad. Řešte diferenciální rovnici = 2. Řešení: Přepišme danou rovnici na tvar = (2 ), což
ODR - řešené příkla 20 5 ANALYTICKÉ A NUMERICKÉ METODY ŘEŠENÍ ODR A. Analtické meto řešení Vzorové příkla: 5.. Příklad. Řešte diferenciální rovnici = 2. Řešení: Přepišme danou rovnici na tvar = (2 ), což
Czech Technical University in Prague Faculty of Electrical Engineering. Fakulta elektrotechnická. České vysoké učení technické v Praze
 Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
Úvod. Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali
 NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Algebraické výrazy - řešené úlohy
 Algebraické výrazy - řešené úlohy Úloha č. 1 Určete jeho hodnotu pro =. Určete, pro kterou hodnotu proměnné je výraz roven nule. Za proměnnou dosadíme: = a vypočteme hodnotu výrazu. Nejprve zapíšeme rovnost,
Algebraické výrazy - řešené úlohy Úloha č. 1 Určete jeho hodnotu pro =. Určete, pro kterou hodnotu proměnné je výraz roven nule. Za proměnnou dosadíme: = a vypočteme hodnotu výrazu. Nejprve zapíšeme rovnost,
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
Studijní opory k předmětu 6AA. 6AA Automatizace. Studijní opory k předmětu. Ing. Petr Pokorný 1/40 6AA AUTOMATIZACE 6AA - cvičení
 6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
rovnic), Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =
, Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =") Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Obsah. Aplikovaná matematika I. Gottfried Wilhelm Leibniz. Základní vlastnosti a vzorce
 Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních
Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních
Grafické zobrazení frekvenčních závislostí
 Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
Praha & EU: investujeme do vaší budoucnosti. Daniel Turzík, Miroslava Dubcová,
 E-sbírka příkladů Seminář z matematiky Evropský sociální fond Praha & EU: investujeme do vaší budoucnosti Daniel Turzík, Miroslava Dubcová, Pavla Pavlíková Obsah 1 Úpravy výrazů................................................................
E-sbírka příkladů Seminář z matematiky Evropský sociální fond Praha & EU: investujeme do vaší budoucnosti Daniel Turzík, Miroslava Dubcová, Pavla Pavlíková Obsah 1 Úpravy výrazů................................................................
MECHANICKÉ KMITÁNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Lineární funkce, rovnice a nerovnice 4 lineární nerovnice
 Lineární funkce, rovnice a nerovnice 4 lineární nerovnice 4.1 ekvivalentní úpravy Při řešení lineárních nerovnic používáme ekvivalentní úpravy (tyto úpravy nijak neovlivní výsledek řešení). Jsou to především
Lineární funkce, rovnice a nerovnice 4 lineární nerovnice 4.1 ekvivalentní úpravy Při řešení lineárních nerovnic používáme ekvivalentní úpravy (tyto úpravy nijak neovlivní výsledek řešení). Jsou to především
9.7. Vybrané aplikace
 Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Lineární rovnice. Rovnice o jedné neznámé. Rovnice o jedné neznámé x je zápis ve tvaru L(x) = P(x), kde obě strany tvoří výrazy s jednou neznámou x.
 = P(x), kde obě strany tvoří výrazy s jednou neznámou x.") Lineární rovnice Rovnice je zápis rovnosti mezi dvěma algebraickými výrazy, které obsahují alespoň jednu proměnnou, kterou nazýváme neznámá. Rovnice má levou stranu L a pravou stranu P. Rovnost pak zapisujeme
Lineární rovnice Rovnice je zápis rovnosti mezi dvěma algebraickými výrazy, které obsahují alespoň jednu proměnnou, kterou nazýváme neznámá. Rovnice má levou stranu L a pravou stranu P. Rovnost pak zapisujeme
Diferenciální rovnice 3
 Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
+ ω y = 0 pohybová rovnice tlumených kmitů. r dr dt. B m. k m. Tlumené kmity
 Tlumené kmit V praxi téměř vžd brání pohbu nějaká brzdicí síla, jejíž původ je v třecích silách mezi reálnými těles. Matematický popis těchto sil bývá dosti komplikovaný. Velmi často se vsktuje tzv. viskózní
Tlumené kmit V praxi téměř vžd brání pohbu nějaká brzdicí síla, jejíž původ je v třecích silách mezi reálnými těles. Matematický popis těchto sil bývá dosti komplikovaný. Velmi často se vsktuje tzv. viskózní
Nauka o Kmitání Přednáška č. 4
 Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Fyzika - Sexta, 2. ročník
 - Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
- Sexta, 2. ročník Fyzika Výchovné a vzdělávací strategie Kompetence komunikativní Kompetence k řešení problémů Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník
 EVROPSKÝ SOCIÁLNÍ FOND Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky
EVROPSKÝ SOCIÁLNÍ FOND Průhyb ocelového nosníku. Nezatížený a rovnoměrně zatížený nosník PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení technické v Praze, Fakulta stavební, Katedra matematiky
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. y + y = 4 sin t.
 1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
9.2. Zkrácená lineární rovnice s konstantními koeficienty
 9.2. Zkrácená lineární rovnice s konstantními koeficienty Cíle Řešíme-li konkrétní aplikace, které jsou popsány diferenciálními rovnicemi, velmi často zjistíme, že fyzikální nebo další parametry (hmotnost,
9.2. Zkrácená lineární rovnice s konstantními koeficienty Cíle Řešíme-li konkrétní aplikace, které jsou popsány diferenciálními rovnicemi, velmi často zjistíme, že fyzikální nebo další parametry (hmotnost,
1 1 x 2. Jedná se o diferenciální rovnici se separovanými proměnnými, která má smysl pro x ±1 a
 . Řešené úlohy Příklad. (separace proměnných). Řešte počáteční úlohu y 2 + yy ( 2 ) = 0, y(0) = 2. Řešení. Rovnici přepíšeme do tvaru y 2 = yy ( 2 ) y = y2 y 2. Jedná se o diferenciální rovnici se separovanými
. Řešené úlohy Příklad. (separace proměnných). Řešte počáteční úlohu y 2 + yy ( 2 ) = 0, y(0) = 2. Řešení. Rovnici přepíšeme do tvaru y 2 = yy ( 2 ) y = y2 y 2. Jedná se o diferenciální rovnici se separovanými
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Projekt OPVK - CZ.1.07/1.1.00/ Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Číslo a proměnná Gradovaný řetězec úloh Téma: soustava rovnic, parametry Autor: Stanislav Trávníček
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Číslo a proměnná Gradovaný řetězec úloh Téma: soustava rovnic, parametry Autor: Stanislav Trávníček
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Lineární rovnice prvního řádu. Máme řešit nehomogenní lineární diferenciální rovnici prvního řádu. Funkce h(t) = 2
 = 2") Cvičení Lineární rovnice prvního řádu. Najděte řešení Cauchyovy úlohy x + x tg t = cos t, které vyhovuje podmínce xπ =. Máme nehomogenní lineární diferenciální rovnici prvního řádu. Funkce ht = tg t a
Cvičení Lineární rovnice prvního řádu. Najděte řešení Cauchyovy úlohy x + x tg t = cos t, které vyhovuje podmínce xπ =. Máme nehomogenní lineární diferenciální rovnici prvního řádu. Funkce ht = tg t a
Laserová technika prosince Katedra fyzikální elektroniky.
 Laserová technika 1 Aktivní prostředí Šíření optických impulsů v aktivním prostředí Jan Šulc Katedra fyzikální elektroniky České vysoké učení technické jan.sulc@fjfi.cvut.cz. prosince 016 Program přednášek
Laserová technika 1 Aktivní prostředí Šíření optických impulsů v aktivním prostředí Jan Šulc Katedra fyzikální elektroniky České vysoké učení technické jan.sulc@fjfi.cvut.cz. prosince 016 Program přednášek
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
PŘÍKLAD PŘECHODNÝ DĚJ DRUHÉHO ŘÁDU ŘEŠENÍ V ČASOVÉ OBLASTI A S VYUŽITÍM OPERÁTOROVÉ ANALÝZY
 PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
Digitální učební materiál
 Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Vzpěr jednoduchého rámu, diferenciální operátory. Lenka Dohnalová
 1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
KMS cvičení 5. Ondřej Marek
 KMS cvičení 5 Ondřej Marek Ondřej Marek KMS 5 KINEMAICKÉ BUZENÍ ABSOLUNÍ SOUŘADNICE Pohybová rovnice: mx + b x x + k x x = mx + bx + kx = bx + kx Partikulární řešení: x = X e iωt x = iωx e iωt k m b x(t)
KMS cvičení 5 Ondřej Marek Ondřej Marek KMS 5 KINEMAICKÉ BUZENÍ ABSOLUNÍ SOUŘADNICE Pohybová rovnice: mx + b x x + k x x = mx + bx + kx = bx + kx Partikulární řešení: x = X e iωt x = iωx e iωt k m b x(t)
. je zlomkem. Ten je smysluplný pro jakýkoli jmenovatel různý od nuly. Musí tedy platit = 0
 Příklad 1 Určete definiční obor funkce: a) = b) = c) = d) = e) = 9 f) = Řešení 1a Máme určit definiční obor funkce =. Výraz je zlomkem. Ten je smysluplný pro jakýkoli jmenovatel různý od nuly. Musí tedy
Příklad 1 Určete definiční obor funkce: a) = b) = c) = d) = e) = 9 f) = Řešení 1a Máme určit definiční obor funkce =. Výraz je zlomkem. Ten je smysluplný pro jakýkoli jmenovatel různý od nuly. Musí tedy
Příklad 1. Řešení 1a Máme vyšetřit lichost či sudost funkce ŘEŠENÉ PŘÍKLADY Z M1A ČÁST 3
 Příklad 1 Zjistěte, zda jsou dané funkce sudé nebo liché, případně ani sudé ani liché: a) =ln b) = c) = d) =4 +1 e) =sin cos f) =sin3+ cos+ Poznámka Všechny tyto úlohy řešíme tak, že argument funkce nahradíme
Příklad 1 Zjistěte, zda jsou dané funkce sudé nebo liché, případně ani sudé ani liché: a) =ln b) = c) = d) =4 +1 e) =sin cos f) =sin3+ cos+ Poznámka Všechny tyto úlohy řešíme tak, že argument funkce nahradíme
Seismografy a Seismické pozorovací sítě mají pro seismo
 Seismografy a Seismické pozorovací sítě mají pro seismologii tak zásadní důležitost jakou mají teleskopy pro astronomii či urychlovače pro fyziku. Bez nich bychom věděli jen pramálo o tom, jak vypadá nitro
Seismografy a Seismické pozorovací sítě mají pro seismologii tak zásadní důležitost jakou mají teleskopy pro astronomii či urychlovače pro fyziku. Bez nich bychom věděli jen pramálo o tom, jak vypadá nitro
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Komplexní analýza. Laplaceova transformace. Martin Bohata. Katedra matematiky FEL ČVUT v Praze
 Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
11. přednáška 10. prosince Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah
 je vztah") 11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
Jméno autora: Mgr. Zdeněk Chalupský Datum vytvoření: 20. 8. 2012 Číslo DUM: VY_32_INOVACE_16_FY_A
 Jméno autora: Mgr. Zdeněk Chalupský Datum vytvoření: 20. 8. 2012 Číslo DUM: VY_32_INOVACE_16_FY_A Ročník: I. Fyzika Vzdělávací oblast: Přírodovědné vzdělávání Vzdělávací obor: Fyzika Tematický okruh: Mechanika
Jméno autora: Mgr. Zdeněk Chalupský Datum vytvoření: 20. 8. 2012 Číslo DUM: VY_32_INOVACE_16_FY_A Ročník: I. Fyzika Vzdělávací oblast: Přírodovědné vzdělávání Vzdělávací obor: Fyzika Tematický okruh: Mechanika
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Matematická analýza III.
 2. Parciální derivace Miroslav Hušek, Lucie Loukotová UJEP 2010 Parciální derivace jsou zobecněním derivace funkce jedné proměnné. V této kapitole poznáme jejich základní vlastnosti a využití. Co bychom
2. Parciální derivace Miroslav Hušek, Lucie Loukotová UJEP 2010 Parciální derivace jsou zobecněním derivace funkce jedné proměnné. V této kapitole poznáme jejich základní vlastnosti a využití. Co bychom
ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
Přehled matematického aparátu
 Přehled matematického aparátu Ekonomie je směsí historie, filozofie, etiky, psychologie, sociologie a dalších oborů je tak příslovečným tavicím kotlem ostatních společenských věd. Ekonomie však často staví
Přehled matematického aparátu Ekonomie je směsí historie, filozofie, etiky, psychologie, sociologie a dalších oborů je tak příslovečným tavicím kotlem ostatních společenských věd. Ekonomie však často staví
MATEMATIKA III. Olga Majlingová. Učební text pro prezenční studium. Předběžná verze
 Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Fourierova transformace
 Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Konvexnost, konkávnost
 20. srpna 2007 1. f = x 3 12x 2. f = x 2 e x 3. f = x ln x Příklad 1. Určete intervaly, na kterých je funkce konvexní a konkávní a určete inflexní body f = x 3 12x Příklad 1. f = x 3 12x Řešení: Df = R
20. srpna 2007 1. f = x 3 12x 2. f = x 2 e x 3. f = x ln x Příklad 1. Určete intervaly, na kterých je funkce konvexní a konkávní a určete inflexní body f = x 3 12x Příklad 1. f = x 3 12x Řešení: Df = R
6. dubna *********** Přednáška ***********
 KMA/MAT2 Přednáška a cvičení č. 8, Obyčejné diferenciální rovnice 2 6. dubna 2016 *********** Přednáška *********** 1 Existence a jednoznačnost řešení Cauchyovy úlohy Stále uvažujeme rovnici y = f(t, y).
KMA/MAT2 Přednáška a cvičení č. 8, Obyčejné diferenciální rovnice 2 6. dubna 2016 *********** Přednáška *********** 1 Existence a jednoznačnost řešení Cauchyovy úlohy Stále uvažujeme rovnici y = f(t, y).
Matematika 3. m působíme silou F, uvedeme ho do pohybu a udělíme mu zrychlení a. Úkolem
 Matematika 3. Ing. Marek Nikodým, Ph.D. Katedra matematiky a deskriptívní geometrie VŠB-TU Ostrava DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice jsou velmi důležité a mají obrovské využití hlavně ve fyzice.
Matematika 3. Ing. Marek Nikodým, Ph.D. Katedra matematiky a deskriptívní geometrie VŠB-TU Ostrava DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice jsou velmi důležité a mají obrovské využití hlavně ve fyzice.
8.1. Separovatelné rovnice
 8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
Extrémy funkce dvou proměnných
 Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Vzdělávací materiál. vytvořený v projektu OP VK CZ.1.07/1.5.00/34.0211. Anotace. Integrální počet VY_32_INOVACE_M0308. Matematika
 Vzdělávací materiál vytvořený v projektu OP VK Název školy: Gymnázium, Zábřeh, náměstí Osvobození 0 Číslo projektu: Název projektu: Číslo a název klíčové aktivity: CZ..07/.5.00/3.0 Zlepšení podmínek pro
Vzdělávací materiál vytvořený v projektu OP VK Název školy: Gymnázium, Zábřeh, náměstí Osvobození 0 Číslo projektu: Název projektu: Číslo a název klíčové aktivity: CZ..07/.5.00/3.0 Zlepšení podmínek pro
Dynamika proudících plynů
 Dynamika proudících plynů Při výpočtech se budeme zabývat prouděním ideálních plynů. Jejich vlastnosti již byly popsány na předchozích přednáškách/cvičeních. Při proudění ideálního plynu si zavedeme ještě
Dynamika proudících plynů Při výpočtech se budeme zabývat prouděním ideálních plynů. Jejich vlastnosti již byly popsány na předchozích přednáškách/cvičeních. Při proudění ideálního plynu si zavedeme ještě
Soustavy linea rnı ch rovnic
 [1] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení a) soustavy, 10, b) P. Olšák, FEL ČVUT, c) P. Olšák 2010, d) BI-LIN, e) L, f) 2009/2010, g)l.
[1] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení a) soustavy, 10, b) P. Olšák, FEL ČVUT, c) P. Olšák 2010, d) BI-LIN, e) L, f) 2009/2010, g)l.
Příklad 1 ŘEŠENÉ PŘÍKLADY Z M1B ČÁST 2. Určete a načrtněte definiční obory funkcí více proměnných: a) (, ) = b) (, ) = 3. c) (, ) = d) (, ) =
 (, ) = b) (, ) = 3. c) (, ) = d) (, ) =") Příklad 1 Určete a načrtněte definiční obory funkcí více proměnných: a) (, ) = b) (, ) = 3 c) (, ) = d) (, ) = e) (, ) = ln f) (, ) = 1 +1 g) (, ) = arcsin( + ) Poznámka V těchto úlohách máme nalézt největší
Příklad 1 Určete a načrtněte definiční obory funkcí více proměnných: a) (, ) = b) (, ) = 3 c) (, ) = d) (, ) = e) (, ) = ln f) (, ) = 1 +1 g) (, ) = arcsin( + ) Poznámka V těchto úlohách máme nalézt největší
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Diferenciální rovnice separace proměnných verze 1.1
 Úvod Diferenciální rovnice separace proměnných verze. Následující tet popisuje řešení diferenciálních rovnic, konkrétně metodu separace proměnných. Měl by sloužit především studentům předmětu MATEMAT na
Úvod Diferenciální rovnice separace proměnných verze. Následující tet popisuje řešení diferenciálních rovnic, konkrétně metodu separace proměnných. Měl by sloužit především studentům předmětu MATEMAT na
Funkce jedné reálné proměnné. lineární kvadratická racionální exponenciální logaritmická s absolutní hodnotou
 Funkce jedné reálné proměnné lineární kvadratická racionální exponenciální logaritmická s absolutní hodnotou lineární y = ax + b Průsečíky s osami: Px [-b/a; 0] Py [0; b] grafem je přímka (získá se pomocí
Funkce jedné reálné proměnné lineární kvadratická racionální exponenciální logaritmická s absolutní hodnotou lineární y = ax + b Průsečíky s osami: Px [-b/a; 0] Py [0; b] grafem je přímka (získá se pomocí
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
1 U Zapište hodnotu časové konstanty derivačního obvodu. Vyznačte měřítko na časové ose v uvedeném grafu.
 v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet