Konvexní obálka množiny bodů.
|
|
|
- Erik Bednář
- před 9 lety
- Počet zobrazení:
Transkript
1 Konvexní obálka množiny bodů. Graham Scan. Jarvis Scan. Quick Hull. Inkrementální metoda. Divide and Conquer. Rotating Calipers. Tomáš Bayer Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. 1 / 39

2 Obsah přednášky 1 Úvod do problému 2 Formulace problému 3 Metody konstrukce konvexní obálky 4 Minimum Area Enclosing Rectangle 5 Detekce hlavních směrů budov 2 / 39


3 Úvod do problému 1. Detekce obrysu budovy z klasifikovaných dat Tomáš Bayer bayertom@natur.cuni.cz (Katedra aplikované Konvexní geoinformatiky obálkaamnožiny kartografie. bodpr írodov u. e decká fakulta UK.) 3 / 39

4 Formulace problému 2. Formulace problému Dáno: Hledáme: Množina n bodů S = {p 1,, p 2,..., p n} v R 2, kde p i = [x i, y i]. Nejmenší konvexní množinu C, p i C. (Convex Hull Problem) Definice 1: Konvexní obálka množiny H konečné množiny S v E 2 představuje nejmenší konvexní mnohoúhelník P obsahující S (tj. neexistuje P P splňující definici). Definice 2: Konvexní obálka H množiny konečné množiny S představuje konvexní mnohoúhelník P s nejmenší plochou. Definice 3: Konvexní obálka H množiny konečné množiny S představuje průsečnici všech polorovin obsahujících S. Definice 4: Konvexní obálka H množiny konečné množiny S představuje sjednocení všech trojúhelníků, jejichž vrcholy tvoří body v S. Množinu S označíme jako konvexní, pokud spojnice libovolných dvou prvků leží zcela uvnitř této množiny. 4 / 39


5 Formulace problému 3. Ukázka konvexní obálky H množiny S 5 / 39

6 Formulace problému 4. Využití konvexní obálky Jedna z nejpoužívanějších geometrických struktur, pomocná struktura pro řadu algoritmů. Často používána jako první odhad tvaru prostorového jevu Příklady použití: Detekce kolizí: plánování pohybu robotů. Konstrukce MBR: využití v kartografii pro detekci tvaru a natočení budov. Analýza tvarů (Shape Analysis): analýza tvarů objektů. Statistická analýza: analýza rozptylů, odhady, např. metoda Onion Peeling. Analýza shluků (Cluster Analysis): vlastnosti clusterovaných dat. Poznámka: Konvexní obálka H existuje v R d., budeme se zabývat pouze R 2. variantou. 6 / 39
: vlastnosti clusterovaných dat.")
7 Formulace problému 5. Odhad centroidu metodou Onion Peeling 7 / 39

8 6. Metody konstrukce konvexní obálky Přehled nejčastěji používaných metod pro konstrukci konvexní obálky: Jarvis Scan (Gift Wrapping) Graham Scan Quick Hull Inkrementální kontrukce Divide and Conquer Některé z metod použitelné pouze pro R 2, jiné převeditelné do vyšší dimenze. 8 / 39

9 7. Jarvis Scan Připomíná postup balení dárku do papíru (tzv. Gift Wrapping Algorithm), autorem Jarvis Jednoduchá implementace, lze rozšířit i do R 3. Předpoklad: v S nejsou tři kolineární body. Nutnost předzpracování O(n): nalezení pivotu q, q y = min(y i ). Princip algoritmu: Necht p j 1, p j představují dva poslední body H a bod p j+1 aktuálně nalezený bod přidávaný do H. Bod p j+1 musí splňovat kritérium minimálního úhlu θ mezi stranou p j+1 p j a prodloužením strany p j 1 p j. Bod p j+1 hledáme ze všech p i, které dosud nejsou součástí H. 9 / 39

10 8. Algoritmus Jarvis Scan Nevýhodou složitost O(n 2 ), nehodí se pro velké S. Algoritmus 1: Gift Wrapping (S, H) 1: Nalezení pivota q, q = min(y i ), 2: Přidej q H. 3: Inicializuj: p j 1 =lib. bod ležící na ose x, p j = q, p i = p j 1. 4: Opakuj, dokud p i q: 5: Opakuj pro p i / H a body p j 1, p j : 6: Nalezni p i takové, že θ = min(θ i ); 7: Přidej p i H. 8: p j 1 = p j ; p j = p i. 10 / 39

11 9. Ukázka Jarvis Scan 11 / 39

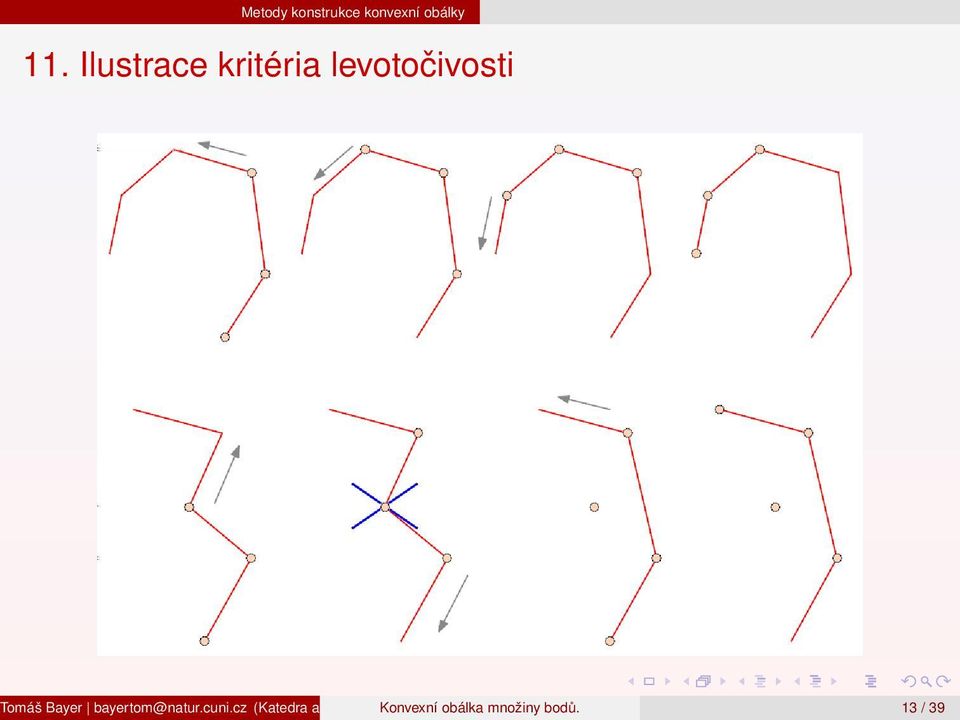
12 10. Graham Scan Algoritmus není možné rošířit do R 3 (Graham 1972). Výrazně nižší časová složitost O(n log(n)), lze použít i na rozsáhlé datasety S. Princip: Každá uspořádaná trojice bodů p j 1, p j, p j+1 H musí splňovat kritérium levotočivosti. Pokud pro libovolnou trojici bodů p j 1, p j, p j+1 platí kritérium levotočivosti: Body zřejmě leží na H (avšak nemusí!). Pak testování následující trojice p j, p j+1, p j+2... neplatí kritérium levotočivosti: Odstraníme vrchol p j z H, tj. prostřední bod p j nemůže ležet na H. Pak testování trojice p j 2, p j 1, p j+1, tj. bod p j doplněn na trojici dvěma nejbližšími předchůdci p j 2, p j 1 H. Jako kritérium levotočivosti je používán Half Edge test. 12 / 39

13 11. Ilustrace kritéria levotočivosti 13 / 39
14 12. Algoritmus Grahamova skenování Přezpracování O(n): pivot q, nejpravější bod q y = min(y i ). Přezpracování O(n log(n)): setřídění datasetu S podle úhlu k ose x v bodě p. Algoritmus 2: Graham Scan (S, Q) 1: Nalezení pivota q, nejpravější bod q y = min(y i ), q H. 2: Setřídění všech bodů S úhlově dle q, index j odpovídá setříděnému pořadí. 3: Pokud dva body mají stejný úhel, vymaž bod bližší q. 4: Inicializuj j = 2; Stack Q. 5: push (q, p 1 ) Q, (indexy posledních dvou prvků p t, p t 1 ) 5: Opakuj pro j < n: 6: if p j vlevo od p t 1, p t : 7: push p t do Q. 8: j = j : else pop Q. 14 / 39


15 13. Ukázka konstrukce Graham Scan 15 / 39

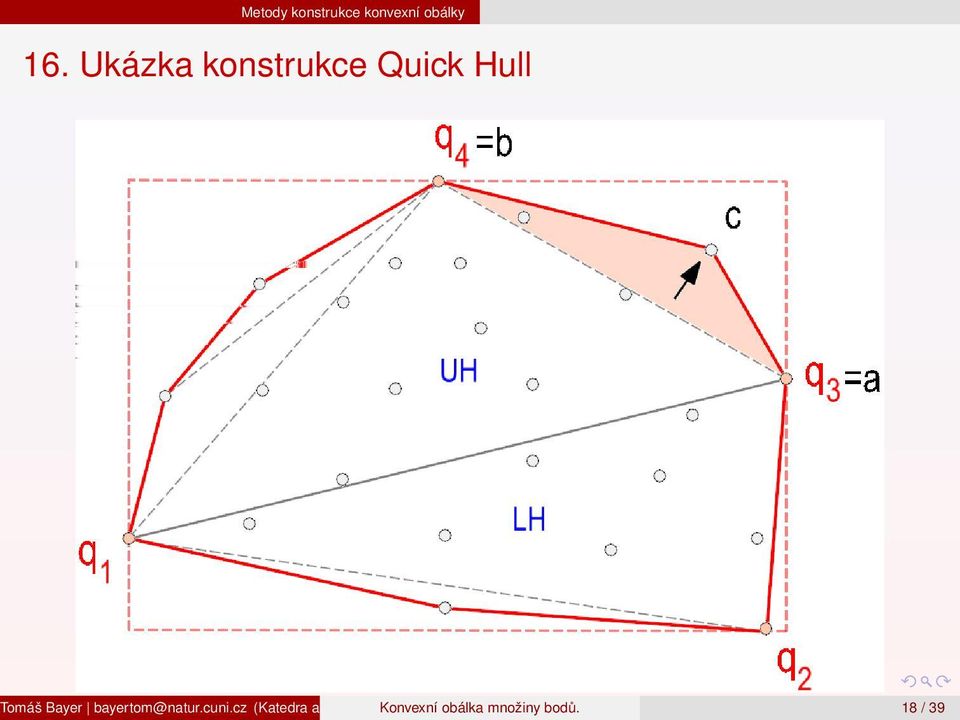
16 14. Algoritmus Quick Hull Nazván QuickHull pro analogii s QuickSortem. Založen na přístupu Divide and Conquer, složitost O(n 2 ). Princip algoritmu: Konvexní obálka je konstruována ze dvou částí, z horní části nazývané Upper Hull a dolní části nazývané Lower Hull. Upper Hull je nad spojnicí dvou bodů q 1, q 3 MBR s extrémními souřadnicemi x, q 1 = min(x i), q 3 = max(x i), Lower Hull pod touto spojnicí q 1, q 3. Nad každou nalezenou stranou obálky a, b hledáme nejvzdálenější bod c ležící vpravo od této strany, který se stává novým bodem konvexní obálky každá nalezená strana se rozpadne na dvě nové. Obě části konvexní obálky zpracovávány separátně, výslednou konvexní obálku složíme z obou částí. Důvod rychlosti algoritmu (navzdory kvadratickému odhadu nejhoršího případu): při vytváření konvexní obálky se nesnažíme pracovat se všemi body vstupní množiny, ale pouze s body, které nacházejí blízko konvexní obálky. 16 / 39

17 15. Algoritmus Quick Hull Algoritmus využívá dvojici rekurzivních volání procedury QuicHull nad nově vzniklými stranami ac, cb z původní strany ab. Parametry: počáteční a koncový bod dělené strany a jí příslušející podmnožiny datasetu S, H. Nutnost předzpracování, nalezení MBR, rozdělení množiny. Algoritmus 3: Quick Hull (a, b S, H) 1: if (a + 1 b) S = Ø; return; //Hrana neobsahuje mezilehlé body 2: else: 3: Najdi bod c S, d(c, a, b) = max ležící vpravo od a, b 4: If c = /O return; //Neexistuje bod vpravo od hrany. 5: H c. //Přidej bod c do H. 6: Quick Hull(a, c, S, H) //Upper Hull 7: Quick Hull(c, b, S, H) //Lower Hull Volání: q 1 = [min(x i ), y] q 3 = [max(x i ), y] Split S to S1, S2; QuickHull(q 1, q 3, S1); //Upper Hull QuickHull(q 3, q 1, S2); //Lower Hull 17 / 39

18 16. Ukázka konstrukce Quick Hull 18 / 39
19 17. Implementace s aproximací body MBR První aproximace H představuje konvexní čtyřúhelník q 1, q 2, q 3, q 4. H zpracováván postupně po jednotlivých segmentech. Algoritmus využívá čtveřici rekurzivních volání procedury QuickHull nad každou stranou (q i q i+1 ) urychlení. Volání: q 1 = [min(x i ), y]; q 2 = [x, min(y i )]; q 3 = [max(x i ), y]; q 4 = [x, max(y i )]; Split S to S1, S2, S3, S4; QuickHull(q 1, q 2, S 1, H); QuickHull(q 2, q 3, S 2, H); QuickHull(q 3, q 4, S 3, H); QuickHull(q 4, q 1, S 4, H); 19 / 39
, y]; q 2 = [x, min(y i )]; q 3 = [max(x i ), y]; q 4 = [x, max(y i )]; Split S to S1, S2, S3, S4;")

20 18. Ukázka konstrukce Quick Hull s aproximací body MBR 20 / 39

21 19. Inkrementální konstrukce Rychlá konstrukce, složitost O(n log(n)). Lze převést do vyšší dimenze. Princip algoritmu: Body z S přidávány po jednom do vytvořené konvexní obálky H, jejíž tvar je modifikován. Necht P představuje podmnožinu datasetu S obsahující m bodů a p přidávaný bod, pak H m+1 = H m p. Při přidání bodu p do H m mohou nastat dvě situace: p H m Bod p může být zanedbán, neovlivní tvar H m+1. Test polohy p vzhledem k H m realizován prostřednictvím Half Edge testu. p / H m Bod p ovlivní tvar H m+1. Nutno najít horní a dolní tečny t 1, t 2 procházející p kolmé k H m. 21 / 39

22 20. Ukázka nalezení horní a dolní tečny 22 / 39
23 21. Princip nalezení horní a dolní tečny t 1, t 2 V každém bodě H m lestujeme polohu incidujících dvou stran e j, e j+1 vzhledem k přidávanému bodu p. V bodech dotyku tečen platí: Dolní tečna t 1: Bod p vlevo od e j a vpravo od e j+1. Horní tečna t 2: Bod p vpravo od e j a vlevo od e j+1. Pro ostatní vrcholy p i leží bod p na stejné straně od e j, e j+1. Konvexní obálka mezi dotykovými body tečen odstraněna a nahrazena dvojicí tečen. Algoritmus 4: Upper and Lower Tangent 1: for i = 0 to n 1 2: if XOR(p vlevo od/na p i 1p i, p vlevo od/na p ip i+1) 3: p i je dotykový bod. Poznámka: XOR(A, B) = (A B) (B A). 23 / 39
24 22. Konstrukce metodou Divide and Conquer Algoritmus se složitostí O(n log(n)). Lze snadno převést do vyšší dimenze. Jeho implementace je poněkud obtížnější. Princip algoritmu: Rozdělení problému nad množinou S na dvě podmnožiny S 1, S 2 stejné velikosti, které zpracovávány samostatně. Obě řešení poté spojena s využitím horní a dolní společné tečny t 1, t 2 množin S 1, S 2, spojení lze realizovat v lineárním čase O(n). Tyto podmnožiny mohou být opět děleny na další podmnožiny S i poloviční velikosti tak dlouho, dokud řešení problému není geometricky jednoduché konvexní obálka množiny tvořené třema body. Popis algoritmu bude ilustrován pro dvojici podmnožin A, B. 24 / 39
25 23. Algoritmus Divide and Conquer Předpoklad: žádná trojice bodů není kolineární a žádné dva body v datasetu nemají stejné souřadnice x. Dělení S na dvě podmnožiny A, B a jejich následné spojení s nalezením horní a dolní tečny t 1, t 2. Algoritmus 5: Divide and Conquer. 1: Setřídění S podle x. 2: Rozdělení S na dvě podmnožiny A, B obsahující n/2 bodů. 3: Konstrukce konvexních obálek H(A) a H(B). 4: Spojení konvexních obálek H = H(A) H(B). 5: Nalezení dolní tečny t 1. 6: Nalezení horní tečny t 2. 7: Nahrazení úseků konvexních obálek A, B mezi oběma tečnami. 25 / 39
26 24. Algoritmus nalezení dolní tečny t 1 Existence řady algoritmů pro spojení dvojice konvexních obálek. Ukázka spojení nalezení dolní tečny t 1 procházkou, Walking Algorithm (Preprata & Hong, 1977). Z extrémních bodů a, b množin A, B nalezneme k bodu a bod b takový, že jejich spojnice je dolní tečnou B. Z bodu b hledáme bod a takový, aby jejich spojnice byla dolní tečnou A. Postup opakujeme, dokud a, b není dolní tečnou A i B. Algoritmus 6: Lower Tangent t 1, Walk 1: Najdi bod a: nejpravější bod A. 2: Najdi bod b: nejpravější bod B. 3: Opakuj, dokud t 1 = ab není dolní tečnou A a B. 4: Opakuj, dokud t 1 není dolní tečnou A: 5: a = a 1. 6: Opakuj, dokud t 1 není dolní tečnou B: 7: b = b / 39

27 25. Princip nalezení dolní tečny 27 / 39
28 Minimum Area Enclosing Rectangle 26. Využití konvexní obálky pro konstrukci obdélníka s minimální plochou Dáno: Množina n bodů S v R 2. Hledáme: Obdélník R s nejmenší plochou opsaný S. (Minimum Area Enclosing Box) Naivní algoritmy problém řeší v kvadratickém čase O(n 2 ). Definice: Nejméně jedna strana obdélníka s minimální plochou R opsaného množině S je kolineární se stranou H. Algoritmy pro konstrukci obdélníka s minimální plochou R opsaného množině S pracují s konvexní obálkou H předzpracování. Složitost konstrukce konvexní obálky H : O(n log(n)). Složitost konstrukce obdélníku R nad H: pouze O(n)! Algoritmus řeší problém v čase O(n log(n)). Využití v kartografii pro detekci tvaru a natočení budov. 28 / 39

29 Minimum Area Enclosing Rectangle 27. Ukázka obdélníku s minimální plochou opsaného množině S 29 / 39

30 Minimum Area Enclosing Rectangle 28. Rotating Calipers Algoritmus Rotating Calipers pro nalezení R nad datasetem S v lineárním čase (Toussaint, 1983). V prvním kroku nalezen MBR, který se dotýká H v bodech s extrémními souřadnicemi p i, p j, p k, p l. Úhly stran příslušející 4 extrémním bodům sevřené se stranami MBTR označme θ i, θ j, θ k, θ l. 30 / 39
31 Minimum Area Enclosing Rectangle 29. Princip metody Rotating Calipers Pro délky hran l 1, l 2 MBR a plochu A platí: l 1 = d ik cos ϕ k l 2 = d jl cos ϕ j A = l 1 l 2 Otočení obdélníku o úhel ±δ, nové délky hran l 1, l 2 a plocha A l 1 = d ik cos(ϕ k ± δ) l 2 = d jl cos(ϕ j ± δ) A = l 1 l 2. Rotace dle ±δ lze sčítat, jak určit plochu obdélníku po i-tém otočení z plochy předchozího? Pro vztah mezi A i+1 a A i platí po úpravě: A i+1 = A i (cos 2 δ + (tan ϕ k tan ϕ j ) cos δ sin δ tan ϕ k tan ϕ j sin 2 δ) 31 / 39
32 Minimum Area Enclosing Rectangle 30. Algoritmus metody Rotating Calipers Algoritmus 7: Rotating Calipers 1: Inicializuj A min =, rot = 0, θ sum = 0. 2: Nalezení MBR nad S. 3: Výpočet úhlů ϕ j, ϕ k a plochy A(R). 4: A min = A. 5: Opakuj, dokud θ sum < π 4 : 6: Výpočet úhlů θ i, θ j, θ k, θ l a stran l 1, l 2 7: θ = min(θ i, θ j, θ k, θ l ). 8: Otočení R o úhel θ 9: Určení A(R) z předchozí A. 10: if (A < A min ) 11: A min = A;rot = rot + θ; L 1 = l 1 ; L 2 = l 2. 12: θ sum = θ sum + θ. Možné problémy: numerická nepřesnost vlivem rekurentního výpočtu formule mezi A i+1, A i. 32 / 39

33 Minimum Area Enclosing Rectangle 31. Znázornění metody Rotating Calipers 33 / 39
34 Detekce hlavních směrů budov 32. Detekce úhlu natočení budovy Častý problém při kartografické generalizaci budov či jejich automatickém rozpoznávání. Budova před generalizací a po generalizaci musí mít uchovánu orientaci vzhledem k ostatním obsahovým prvkům mapy (např. zachování uliční čáry). Nutnost detekovat tzv. hlavní směry budovy (jsou na sebe kolmé). Popisují orientaci (tj. natočení) budovy vzhledem k ostatním prvkům mapy. Metody detekce natočení budov: Longest Edge. Weighted Bisektor Minimum Area Enclosing Rectangle. Wall Average. 34 / 39
35 Detekce hlavních směrů budov 33. Metody detekce hlavních směrů budov Longest Edge První hlavní směr budovy představován nejdelší stranou v budově, druhý hlavní směr na ní kolmý. Nedosahuje příliš dobrých výsledků Wieghted Bisector: V budově hledány dvě nejdelší úhlopříčky se směry ϕ 1, ϕ 2 a s délkami s 1, s 2. První hlavní směr je dán váženým průměrem. Dává velmi dobré výsledky. ϕ = s 1ϕ 1 + s 2 ϕ 2 s 1 + s 2. Minimum Area Enclosing Rectangle První hlavní směr představuje delší ze stran R, druhý kratší strana. Dává dobré výsledky, problémy s budovami tvaru L a Z. Wall Average Na každou stranu budovy aplikována operace mod( π 2 ). Zbytky po dělení leží v intervalu < 0, π ). Z hodnot 2 spočten vážený průměr, váhou je délka strany. ϕ = n i=1 s i ϕ i mod( π 2 ) s i. 35 / 39

36 Detekce hlavních směrů budov 34. Detekce hlavních směrů budovy Metody Longest Edge a Wall Average (Duchene et al, 2003). 36 / 39

37 Detekce hlavních směrů budov 35. Detekce hlavních směrů budovy Metody Smallest Area Enclosing Rectangle a Weigted Bisector (Duchene et al, 2003). 37 / 39

38 Detekce hlavních směrů budov 36. Problémy při detekci hlavních směrů Problémy s detekcí hlavních směrů u budov tvarů L, Z. 38 / 39

39 Detekce hlavních směrů budov 37. Vliv chybného určení hlavního směru na kartografickou generalizaci Algoritmus Divide and Conquer (Bayer, 2009). 39 / 39
Konvexní obálka množiny bodů.
 Konvexní obálka množiny bodů. Graham Scan. Jarvis Scan. Quick Hull. Inkrementální metoda. Divide and Conquer. Rotating Calipers. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
Konvexní obálka množiny bodů. Graham Scan. Jarvis Scan. Quick Hull. Inkrementální metoda. Divide and Conquer. Rotating Calipers. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
Triangulace. Význam triangulace. trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy. příklad triangulace
 Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Význam triangulace trojúhelník je základní grafický element aproximace ploch předzpracování pro jiné algoritmy příklad triangulace Definice Triangulace nad množinou bodů v rovině představuje takové planární
Geometrické vyhledání.
 Geometrické vyhledání. Ray algoritmus. Winding algoritmus. Lichoběžníkové (trapezoidální) mapy Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta
Geometrické vyhledání. Ray algoritmus. Winding algoritmus. Lichoběžníkové (trapezoidální) mapy Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta
Triangulace. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta.
 11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
11 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Význam triangulace trojúhelník je základní grafický
Voronoiův diagram. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta
 12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
12 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info Definice V( P) nad množinou bodů P { p v rovině 1,
Dynamické datové struktury III.
 Dynamické datové struktury III. Halda. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra aplikované
Dynamické datové struktury III. Halda. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra aplikované
Geometrické vyhledávání
 mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
mnohoúhelníky a jejich vlastnosti lokalizace bodu vůči konvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či vnější lokalizace bodu vůči nekonvexnímu mnohoúhelníku rozhodnutí, zda je bod vnitřní či
Dynamické datové struktury IV.
 Dynamické datové struktury IV. Prioritní fronta. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Dynamické datové struktury IV. Prioritní fronta. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Topologická kostra. Medial Axis. Straight Skeleton.
 Topologická kostra Medial Axis. Straight Skeleton. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Topologická kostra Medial Axis. Straight Skeleton. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Algoritmy používané ve výpočetní geometrii
 Algoritmy používané ve výpočetní geometrii Hrubá síla. Inkrementální metoda. Zametací přímka. Heuristiky. Rozděl a panuj. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
Algoritmy používané ve výpočetní geometrii Hrubá síla. Inkrementální metoda. Zametací přímka. Heuristiky. Rozděl a panuj. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie.
Dynamické datové struktury I.
 Dynamické datové struktury I. Seznam. Fronta. Zásobník. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz
Dynamické datové struktury I. Seznam. Fronta. Zásobník. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz
Konvexní obálka v E 3 a dělení prostoru
 Konvexní obálka v E 3 a dělení prostoru Zuzana Majdišová 30.1.2015 Úvod Existující algoritmy: QuickHull O nh Divide and Conquer O n log n Inkrementální konstrukce O n log n Balení dárků O nh Hlavní myšlenka
Konvexní obálka v E 3 a dělení prostoru Zuzana Majdišová 30.1.2015 Úvod Existující algoritmy: QuickHull O nh Divide and Conquer O n log n Inkrementální konstrukce O n log n Balení dárků O nh Hlavní myšlenka
Konvexní obal a množina
 Definice M Množina se nazývá konvení, jestliže úsečka spojující libovolné dva její bod je částí této množin, tj. ab, M, t 0, : ta+ ( tb ) M konvení množina a b a b nekonvení množina Definice Konvení obal
Definice M Množina se nazývá konvení, jestliže úsečka spojující libovolné dva její bod je částí této množin, tj. ab, M, t 0, : ta+ ( tb ) M konvení množina a b a b nekonvení množina Definice Konvení obal
Výpočetní geometrie Computational Geometry
 Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
Datové struktury a algoritmy Část 11 Výpočetní geometrie Computational Geometry Petr Felkel 20.12.2005 Úvod Výpočetní geometrie (CG) Příklady úloh Algoritmické techniky paradigmata řazení - jako předzpracování
Úvod do výpočetní geometrie. Základní vztahy.
 Úvod do výpočetní geometrie. Základní vztahy. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Úvod do výpočetní geometrie. Základní vztahy. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká fakulta UK. Tomáš Bayer bayertom@natur.cuni.cz (Katedra
Vzorce počítačové grafiky
 Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Kartografické generalizační algoritmy
 Kartografické generalizační algoritmy Generace bodových prvků/skupin. Generalizace liniových prvků/skupin. Generalizace plošných prvků/skupin. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky
Kartografické generalizační algoritmy Generace bodových prvků/skupin. Generalizace liniových prvků/skupin. Generalizace plošných prvků/skupin. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky
Detekce kartografického zobrazení z množiny
 Detekce kartografického zobrazení z množiny bodů Tomáš Bayer Katedra aplikované geoinformatiky Albertov 6, Praha 2 bayertom@natur.cuni.cz Abstrakt. Detekce kartografického zobrazení z množiny bodů o známých
Detekce kartografického zobrazení z množiny bodů Tomáš Bayer Katedra aplikované geoinformatiky Albertov 6, Praha 2 bayertom@natur.cuni.cz Abstrakt. Detekce kartografického zobrazení z množiny bodů o známých
PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh
 PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh Lomená čára A 0 A 1 A 2 A 3..., A n (n 2) se skládá z úseček A 0 A 1, A 1 A 2, A 2 A 3,..., A n 1 A n, z nichž každé dvě sousední mají společný jeden krajní
PLANIMETRIE 2 mnohoúhelníky, kružnice a kruh Lomená čára A 0 A 1 A 2 A 3..., A n (n 2) se skládá z úseček A 0 A 1, A 1 A 2, A 2 A 3,..., A n 1 A n, z nichž každé dvě sousední mají společný jeden krajní
Syntetická geometrie II
 Mnohoúhelníky Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Čtyřúhelníky Definice (Čtyřúhelník) Jsou dány čtyři body A, B, C, D v rovině, z nichž žádné tři nejsou kolineární. Čtyřúhelník ABCD
Mnohoúhelníky Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Čtyřúhelníky Definice (Čtyřúhelník) Jsou dány čtyři body A, B, C, D v rovině, z nichž žádné tři nejsou kolineární. Čtyřúhelník ABCD
AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza
 AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Shluková analýza Cílem shlukové analýzy je nalézt v datech podmnožiny
AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Shluková analýza Cílem shlukové analýzy je nalézt v datech podmnožiny
Zákony hromadění chyb.
 Zákony hromadění chyb. Zákon hromadění skutečných chyb. Zákon hromadění středních chyb. Tomáš Bayer bayertom@natur.cuni.cz Přírodovědecká fakulta Univerzity Karlovy v Praze, Katedra aplikované geoinformatiky
Zákony hromadění chyb. Zákon hromadění skutečných chyb. Zákon hromadění středních chyb. Tomáš Bayer bayertom@natur.cuni.cz Přírodovědecká fakulta Univerzity Karlovy v Praze, Katedra aplikované geoinformatiky
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Třídění, vyhledávání Daniela Szturcová
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Třídění, vyhledávání Daniela Szturcová
VE 2D A 3D. Radek Výrut. Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského sumy
 25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
25. KONFERENCE O GEOMETRII A POČÍTAČOVÉ GRAFICE Radek Výrut VÝPOČET MINKOWSKÉHO SUMY VE 2D A 3D Abstrakt Tento článek obsahuje postupy pro výpočet Minkowského sumy dvou množin v rovině a pro výpočet Minkowského
Operace s uzavřenými oblastmi v GIS
 Operace s uzavřenými oblastmi v GIS Booleovské operace s uzavřenými oblastmi. Minkowského suma. Offset polygonu. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká
Operace s uzavřenými oblastmi v GIS Booleovské operace s uzavřenými oblastmi. Minkowského suma. Offset polygonu. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie. Přírodovědecká
Grafové algoritmy. Programovací techniky
 Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
Grafové algoritmy. Programovací techniky
 Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Vlastnosti pravděpodobnosti, geometrická pravděpodobnost
 Vlastnosti pravděpodobnosti, geometrická pravděpodobnost 1. Přátelé Igor a Dano si domluví schůzku mezi 9.00 a 10.00. Jejich příchody na dané místo jsou náhodné v rámci smluveného časového intervalu. Každý
Vlastnosti pravděpodobnosti, geometrická pravděpodobnost 1. Přátelé Igor a Dano si domluví schůzku mezi 9.00 a 10.00. Jejich příchody na dané místo jsou náhodné v rámci smluveného časového intervalu. Každý
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Test prvočíselnosti. Úkol: otestovat dané číslo N, zda je prvočíslem
 Test prvočíselnosti Úkol: otestovat dané číslo N, zda je prvočíslem 1. zkusit všechny dělitele od 2 do N-1 časová složitost O(N) cca N testů 2. stačí zkoušet všechny dělitele od 2 do N/2 (větší dělitel
Test prvočíselnosti Úkol: otestovat dané číslo N, zda je prvočíslem 1. zkusit všechny dělitele od 2 do N-1 časová složitost O(N) cca N testů 2. stačí zkoušet všechny dělitele od 2 do N/2 (větší dělitel
Dynamické programování
 Dynamické programování prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Dynamické programování prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Náplň. v.0.03 16.02.2014. - Jednoduché příklady na práci s poli v C - Vlastnosti třídění - Způsoby (algoritmy) třídění
 třídění") Náplň v.0.03 16.02.2014 - Jednoduché příklady na práci s poli v C - Vlastnosti třídění - Způsoby (algoritmy) třídění Spojení dvou samostatně setříděných polí void Spoj(double apole1[], int adelka1, double
Náplň v.0.03 16.02.2014 - Jednoduché příklady na práci s poli v C - Vlastnosti třídění - Způsoby (algoritmy) třídění Spojení dvou samostatně setříděných polí void Spoj(double apole1[], int adelka1, double
Přijímací zkouška na MFF UK v Praze
 Přijímací zkouška na MFF UK v Praze pro bakalářské studijní programy fyzika, informatika a matematika 2016, varianta A U každé z deseti úloh je nabízeno pět odpovědí: a, b, c, d, e. Vaším úkolem je u každé
Přijímací zkouška na MFF UK v Praze pro bakalářské studijní programy fyzika, informatika a matematika 2016, varianta A U každé z deseti úloh je nabízeno pět odpovědí: a, b, c, d, e. Vaším úkolem je u každé
Třídící algoritmy. Insert Sort. Bubble Sort. Select Sort. Shell Sort. Quick Sort. Merge Sort. Heap Sort.
 Třídící algoritmy. Insert Sort. Bubble Sort. Select Sort. Shell Sort. Quick Sort. Merge Sort. Heap Sort. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká
Třídící algoritmy. Insert Sort. Bubble Sort. Select Sort. Shell Sort. Quick Sort. Merge Sort. Heap Sort. Tomáš Bayer bayertom@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie, Přírodovědecká
Algoritmy výpočetní geometrie
 Algoritmy výpočetní geometrie prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Algoritmy výpočetní geometrie prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní algoritmy (BI-EFA)
Vyhledávání. doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava. Prezentace ke dni 21.
 Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
2. Vyšetřete všechny možné případy vzájemné polohy tří různých přímek ležících v jedné rovině.
 ZS1BK_PGE1 Geometrie I: Vybrané úlohy z elementární geometrie 1. Které geometrické útvary mohou vzniknout a) jako průnik dvou polopřímek téže přímky, b) jako průnik dvou polorovin téže roviny? V případě
ZS1BK_PGE1 Geometrie I: Vybrané úlohy z elementární geometrie 1. Které geometrické útvary mohou vzniknout a) jako průnik dvou polopřímek téže přímky, b) jako průnik dvou polorovin téže roviny? V případě
KMA/GPM Barycentrické souřadnice a
 KMA/GPM Barycentrické souřadnice a trojúhelníkové pláty František Ježek jezek@kma.zcu.cz Katedra matematiky Západočeské univerzity v Plzni, 2008 19. dubna 2009 1 Trojúhelníkové pláty obecně 2 Barycentrické
KMA/GPM Barycentrické souřadnice a trojúhelníkové pláty František Ježek jezek@kma.zcu.cz Katedra matematiky Západočeské univerzity v Plzni, 2008 19. dubna 2009 1 Trojúhelníkové pláty obecně 2 Barycentrické
Maturitní téma: Programovací jazyk JAVA
 Maturitní téma: Programovací jazyk JAVA Insert Sort (třídění vkládáním) 1. Jako setříděnou část označíme první prvek pole. Jako nesetříděnou část označíme zbytek pole. 2. Vezmeme první (libovolný) prvek
Maturitní téma: Programovací jazyk JAVA Insert Sort (třídění vkládáním) 1. Jako setříděnou část označíme první prvek pole. Jako nesetříděnou část označíme zbytek pole. 2. Vezmeme první (libovolný) prvek
Různostranný (obecný) žádné dvě strany nejsou stějně dlouhé. Rovnoramenný dvě strany (ramena) jsou stejně dlouhé, třetí strana je základna
 žádné dvě strany nejsou stějně dlouhé. Rovnoramenný dvě strany (ramena) jsou stejně dlouhé, třetí strana je základna") 16. Trojúhelník, Mnohoúhelník, Kružnice (typy trojúhelníků a jejich vlastnosti, Pythagorova věta, Euklidovy věty, čtyřúhelníky druhy a jejich vlastnosti, kružnice obvodový a středový, úsekový úhel, vzájemná
16. Trojúhelník, Mnohoúhelník, Kružnice (typy trojúhelníků a jejich vlastnosti, Pythagorova věta, Euklidovy věty, čtyřúhelníky druhy a jejich vlastnosti, kružnice obvodový a středový, úsekový úhel, vzájemná
DobSort. Úvod do programování. DobSort Implementace 1/3. DobSort Implementace 2/3. DobSort - Příklad. DobSort Implementace 3/3
 DobSort Úvod do programování Michal Krátký 1,Jiří Dvorský 1 1 Katedra informatiky VŠB Technická univerzita Ostrava Úvod do programování, 2004/2005 V roce 1980 navrhl Dobosiewicz variantu (tzv. DobSort),
DobSort Úvod do programování Michal Krátký 1,Jiří Dvorský 1 1 Katedra informatiky VŠB Technická univerzita Ostrava Úvod do programování, 2004/2005 V roce 1980 navrhl Dobosiewicz variantu (tzv. DobSort),
Výpočetní geometrie. Pavel Strachota. 9. listopadu FJFI ČVUT v Praze
 Výpočetní geometrie Pavel Strachota FJFI ČVUT v Praze 9. listopadu 2012 Obsah 1 Úvod 2 Jednoduché algoritmy výpočetní geometrie 3 Další problémy výpočetní geometrie Obsah 1 Úvod 2 Jednoduché algoritmy
Výpočetní geometrie Pavel Strachota FJFI ČVUT v Praze 9. listopadu 2012 Obsah 1 Úvod 2 Jednoduché algoritmy výpočetní geometrie 3 Další problémy výpočetní geometrie Obsah 1 Úvod 2 Jednoduché algoritmy
Kristýna Bémová. 13. prosince 2007
 Křivky v počítačové grafice Kristýna Bémová Univerzita Karlova v Praze 13. prosince 2007 Kristýna Bémová (MFF UK) Křivky v počítačové grafice 13. prosince 2007 1 / 36 Pojmy - křivky a jejich parametrické
Křivky v počítačové grafice Kristýna Bémová Univerzita Karlova v Praze 13. prosince 2007 Kristýna Bémová (MFF UK) Křivky v počítačové grafice 13. prosince 2007 1 / 36 Pojmy - křivky a jejich parametrické
Vektory a matice. Obsah. Aplikovaná matematika I. Carl Friedrich Gauss. Základní pojmy a operace
 Vektory a matice Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah 1 Vektory Základní pojmy a operace Lineární závislost a nezávislost vektorů 2 Matice Základní pojmy, druhy matic Operace s maticemi
Vektory a matice Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah 1 Vektory Základní pojmy a operace Lineární závislost a nezávislost vektorů 2 Matice Základní pojmy, druhy matic Operace s maticemi
7 Konvexní množiny. min c T x. při splnění tzv. podmínek přípustnosti, tj. x = vyhovuje podmínkám: A x = b a x i 0 pro každé i n.
 7 Konvexní množiny Motivace. Lineární programování (LP) řeší problém nalezení minima (resp. maxima) lineárního funkcionálu na jisté konvexní množině. Z bohaté škály úloh z této oblasti jmenujme alespoň
7 Konvexní množiny Motivace. Lineární programování (LP) řeší problém nalezení minima (resp. maxima) lineárního funkcionálu na jisté konvexní množině. Z bohaté škály úloh z této oblasti jmenujme alespoň
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál
 Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
68. ročník Matematické olympiády 2018/2019
 68. ročník Matematické olympiády 2018/2019 Řešení úloh krajského kola kategorie P P-II-1 Tulipány Budeme řešit o něco obecnější úlohu: dovolíme si předepsat, zda má na n-té pozici být tulipán, a pokud
68. ročník Matematické olympiády 2018/2019 Řešení úloh krajského kola kategorie P P-II-1 Tulipány Budeme řešit o něco obecnější úlohu: dovolíme si předepsat, zda má na n-té pozici být tulipán, a pokud
Algoritmizace prostorových úloh
 Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
Algoritmizace prostorových úloh Vektorová data Daniela Szturcová Prostorová data Geoobjekt entita definovaná v prostoru. Znalost jeho identifikace, lokalizace umístění v prostoru, vlastností vlastních
64. ročník matematické olympiády Řešení úloh krajského kola kategorie A
 64. ročník matematické olympiády Řešení úloh krajského kola kategorie A 1. Středy stran AC, BC označme postupně, N. Střed kružnice vepsané trojúhelníku KLC označme I. Úvodem poznamenejme, že body K, L
64. ročník matematické olympiády Řešení úloh krajského kola kategorie A 1. Středy stran AC, BC označme postupně, N. Střed kružnice vepsané trojúhelníku KLC označme I. Úvodem poznamenejme, že body K, L
Shodná zobrazení v rovině
 Shodná zobrazení v rovině Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz. Zapisujeme Z: X X. Množinu obrazů všech
Shodná zobrazení v rovině Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz. Zapisujeme Z: X X. Množinu obrazů všech
Shodná zobrazení. bodu B ležet na na zobrazené množině b. Proto otočíme kružnici b kolem
 Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Teorie sférické trigonometrie
 Teorie sférické trigonometrie Trigonometrie (z řeckého trigónon = trojúhelník a metrein= měřit) je oblast goniometrie zabývající se praktickým užitím goniometrických funkcí při řešení úloh o trojúhelnících.
Teorie sférické trigonometrie Trigonometrie (z řeckého trigónon = trojúhelník a metrein= měřit) je oblast goniometrie zabývající se praktickým užitím goniometrických funkcí při řešení úloh o trojúhelnících.
A4B33ALG 2010/05 ALG 07. Selection sort (Select sort) Insertion sort (Insert sort) Bubble sort deprecated. Quicksort.
 Insertion sort (Insert sort) Bubble sort deprecated. Quicksort.") A4B33ALG 2010/05 ALG 07 Selection sort (Select sort) Insertion sort (Insert sort) Bubble sort deprecated Quicksort Stabilita řazení 1 Selection sort Neseřazeno Seřazeno Start T O U B J R M A K D Z E min
A4B33ALG 2010/05 ALG 07 Selection sort (Select sort) Insertion sort (Insert sort) Bubble sort deprecated Quicksort Stabilita řazení 1 Selection sort Neseřazeno Seřazeno Start T O U B J R M A K D Z E min
Analytická geometrie ( lekce)
") Analytická geometrie (5. - 6. lekce) Sylva Potůčková, Dana Stesková, Lubomír Sedláček Gymnázium a Jazyková škola s právem státní jazykové zkoušky Zlín Zlín, 20. června 2011 Vektory Vektorový součin Vektorový
Analytická geometrie (5. - 6. lekce) Sylva Potůčková, Dana Stesková, Lubomír Sedláček Gymnázium a Jazyková škola s právem státní jazykové zkoušky Zlín Zlín, 20. června 2011 Vektory Vektorový součin Vektorový
5. P L A N I M E T R I E
 5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
Omezíme se jen na lomené čáry, jejichž nesousední strany nemají společný bod. Jestliže A 0 = A n (pro n 2), nazývá se lomená čára uzavřená.
, nazývá se lomená čára uzavřená.") MNOHOÚHELNÍKY Vlastnosti mnohoúhelníků Lomená čára C 0 C C C 3 C 4 protíná samu sebe. Lomená čára A 0 A A... A n- A n (n ) se skládá z úseček A 0 A, A A,..., A n- A n, z nichž každé dvě sousední mají společný
MNOHOÚHELNÍKY Vlastnosti mnohoúhelníků Lomená čára C 0 C C C 3 C 4 protíná samu sebe. Lomená čára A 0 A A... A n- A n (n ) se skládá z úseček A 0 A, A A,..., A n- A n, z nichž každé dvě sousední mají společný
Základní datové struktury III: Stromy, haldy
 Základní datové struktury III: Stromy, haldy prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní
Základní datové struktury III: Stromy, haldy prof. Ing. Pavel Tvrdík CSc. Katedra počítačových systémů Fakulta informačních technologií České vysoké učení technické v Praze c Pavel Tvrdík, 2010 Efektivní
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
Vzdálenost uzlů v neorientovaném grafu
 Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
4. Digitální model terénu.
 4. Digitální model terénu. 154GEY2 Geodézie 2 4.1 Úvod - Digitální model terénu. 4.2 Tvorba digitálního modelu terénu. 4.3 Druhy DMT podle typu ploch. 4.4 Polyedrický model terénu (TIN model). 4.5 Rastrový
4. Digitální model terénu. 154GEY2 Geodézie 2 4.1 Úvod - Digitální model terénu. 4.2 Tvorba digitálního modelu terénu. 4.3 Druhy DMT podle typu ploch. 4.4 Polyedrický model terénu (TIN model). 4.5 Rastrový
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
3. Třídy P a NP. Model výpočtu: Turingův stroj Rozhodovací problémy: třídy P a NP Optimalizační problémy: třídy PO a NPO MI-PAA
 Jan Schmidt 2011 Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze Zimní semestr 2011/12 MI-PAA EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU: INVESTUJENE DO VAŠÍ BUDOUCNOSTI
Jan Schmidt 2011 Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze Zimní semestr 2011/12 MI-PAA EVROPSKÝ SOCIÁLNÍ FOND PRAHA & EU: INVESTUJENE DO VAŠÍ BUDOUCNOSTI
Vyhledávání. doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava. Prezentace ke dni 12.
 Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 12. září 2016 Jiří Dvorský (VŠB TUO) Vyhledávání 201 / 344 Osnova přednášky
Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 12. září 2016 Jiří Dvorský (VŠB TUO) Vyhledávání 201 / 344 Osnova přednášky
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
1. jarní série Termín odeslání: 4. února 2019
 Váhy 1. jarní série Termín odeslání: 4. února 2019 Vážením na rovnoramenných vahách zjistíme, která strana je těžší, resp. že jsou obě stejně těžké. Na misky vah můžeme dávat i více než jeden předmět.
Váhy 1. jarní série Termín odeslání: 4. února 2019 Vážením na rovnoramenných vahách zjistíme, která strana je těžší, resp. že jsou obě stejně těžké. Na misky vah můžeme dávat i více než jeden předmět.
ZŠ ÚnO, Bratří Čapků 1332
 Úvodní obrazovka Menu Návrat na hlavní stránku Obsah Výsledky Poznámky Záložky edunet Konec Matematika 2 (pro 9-12 let) LangMaster Obsah (střední část) výběr tématu - dvojklikem v seznamu témat (horní
Úvodní obrazovka Menu Návrat na hlavní stránku Obsah Výsledky Poznámky Záložky edunet Konec Matematika 2 (pro 9-12 let) LangMaster Obsah (střední část) výběr tématu - dvojklikem v seznamu témat (horní
Syntetická geometrie I
 Kolineace Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Incidence Incidence je základní vztah - nedefinujeme ji. Bod leží na přímce = Přímka prochází bodem = Bod je incidentní s přímkou. Definice
Kolineace Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Incidence Incidence je základní vztah - nedefinujeme ji. Bod leží na přímce = Přímka prochází bodem = Bod je incidentní s přímkou. Definice
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
ŘEŠENÉ PŘÍKLADY DESKRIPTIVNÍ GEOMETRIE. ONDŘEJ MACHŮ a kol.
 ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
10. Analytická geometrie kuželoseček 1 bod
 10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
Hranová konzistence. Arc consistency AC. Nejprve se zabýváme binárními CSP. podmínka odpovídá hraně v grafu podmínek
 Hranová konzistence Arc consistency AC Nejprve se zabýváme binárními CSP podmínka odpovídá hraně v grafu podmínek Hrana (V i, V j ) je hranově konzistentní, právě když pro každou hodnotu x z aktuální domény
Hranová konzistence Arc consistency AC Nejprve se zabýváme binárními CSP podmínka odpovídá hraně v grafu podmínek Hrana (V i, V j ) je hranově konzistentní, právě když pro každou hodnotu x z aktuální domény
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
IB111 Úvod do programování skrze Python
 Vyhledávání, řazení, složitost IB111 Úvod do programování skrze Python 2012 Otrávené studny 8 studen, jedna z nich je otrávená laboratorní rozbor dokáže rozpoznat přítomnost jedu ve vodě je drahý (je časově
Vyhledávání, řazení, složitost IB111 Úvod do programování skrze Python 2012 Otrávené studny 8 studen, jedna z nich je otrávená laboratorní rozbor dokáže rozpoznat přítomnost jedu ve vodě je drahý (je časově
Stromy, haldy, prioritní fronty
 Stromy, haldy, prioritní fronty prof. Ing. Pavel Tvrdík CSc. Katedra počítačů FEL České vysoké učení technické DSA, ZS 2008/9, Přednáška 6 http://service.felk.cvut.cz/courses/x36dsa/ prof. Pavel Tvrdík
Stromy, haldy, prioritní fronty prof. Ing. Pavel Tvrdík CSc. Katedra počítačů FEL České vysoké učení technické DSA, ZS 2008/9, Přednáška 6 http://service.felk.cvut.cz/courses/x36dsa/ prof. Pavel Tvrdík
Každá kružnice má střed, označuje se S. Všechny body kružnice mají od středu S stejnou vzdálenost, říká se jí poloměr kružnice a označujeme ho r.
 Každá kružnice má střed, označuje se S. Všechny body kružnice mají od středu S stejnou vzdálenost, říká se jí poloměr kružnice a označujeme ho r. Kružnice k je množina všech bodů v rovině, které mají od
Každá kružnice má střed, označuje se S. Všechny body kružnice mají od středu S stejnou vzdálenost, říká se jí poloměr kružnice a označujeme ho r. Kružnice k je množina všech bodů v rovině, které mají od
Arnoldiho a Lanczosova metoda
 Arnoldiho a Lanczosova metoda 1 Částečný problém vlastních čísel Ne vždy je potřeba (a někdy to není ani technicky možné) nalézt celé spektrum dané matice (velké řídké matice). Úloze, ve které chceme aproximovat
Arnoldiho a Lanczosova metoda 1 Částečný problém vlastních čísel Ne vždy je potřeba (a někdy to není ani technicky možné) nalézt celé spektrum dané matice (velké řídké matice). Úloze, ve které chceme aproximovat
Úsečka spojující sousední vrcholy se nazývá strana, spojnice nesousedních vrcholů je úhlopříčka mnohoúhelníku.
 Mnohoúhelníky Je dáno n různých bodů A 1, A 2,. A n, z nichž žádné tři neleží na přímce. Geometrický útvar tvořený lomenou čarou a částí roviny touto čarou ohraničenou nazýváme n-úhelníkem A 1 A 2. A n.
Mnohoúhelníky Je dáno n různých bodů A 1, A 2,. A n, z nichž žádné tři neleží na přímce. Geometrický útvar tvořený lomenou čarou a částí roviny touto čarou ohraničenou nazýváme n-úhelníkem A 1 A 2. A n.
Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na
 Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na mnohostěny a rotační tělesa. - Mnohostěny mají stěny, hrany
Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na mnohostěny a rotační tělesa. - Mnohostěny mají stěny, hrany
Úlohy krajského kola kategorie A
 64. ročník matematické olympiády Úlohy krajského kola kategorie A 1. Je dán trojúhelník ABC s tupým úhlem při vrcholu C. Osa o 1 úsečky AC protíná stranu AB v bodě K, osa o 2 úsečky BC protíná stranu AB
64. ročník matematické olympiády Úlohy krajského kola kategorie A 1. Je dán trojúhelník ABC s tupým úhlem při vrcholu C. Osa o 1 úsečky AC protíná stranu AB v bodě K, osa o 2 úsečky BC protíná stranu AB
REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB
 62 REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB BEZOUŠKA VLADISLAV Abstrakt: Text se zabývá jednoduchým řešením metody nejmenších čtverců v prostředí Matlab pro obecné víceparametrové aproximační funkce. Celý postup
62 REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB BEZOUŠKA VLADISLAV Abstrakt: Text se zabývá jednoduchým řešením metody nejmenších čtverců v prostředí Matlab pro obecné víceparametrové aproximační funkce. Celý postup
NPRG030 Programování I, 2018/19 1 / :03:07
 NPRG030 Programování I, 2018/19 1 / 20 3. 12. 2018 09:03:07 Vnitřní třídění Zadání: Uspořádejte pole délky N podle hodnot prvků Měřítko efektivity: * počet porovnání * počet přesunů NPRG030 Programování
NPRG030 Programování I, 2018/19 1 / 20 3. 12. 2018 09:03:07 Vnitřní třídění Zadání: Uspořádejte pole délky N podle hodnot prvků Měřítko efektivity: * počet porovnání * počet přesunů NPRG030 Programování
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
zejména Dijkstrův algoritmus pro hledání minimální cesty a hladový algoritmus pro hledání minimální kostry.
 Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
Kapitola Ohodnocené grafy V praktických aplikacích teorie grafů zpravidla graf slouží jako nástroj k popisu nějaké struktury. Jednotlivé prvky této struktury mají často přiřazeny nějaké hodnoty (může jít
Základy matematické analýzy
 Základy matematické analýzy Spojitost funkce Ing. Tomáš Kalvoda, Ph.D. 1, Ing. Daniel Vašata 2 1 tomas.kalvoda@fit.cvut.cz 2 daniel.vasata@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Základy matematické analýzy Spojitost funkce Ing. Tomáš Kalvoda, Ph.D. 1, Ing. Daniel Vašata 2 1 tomas.kalvoda@fit.cvut.cz 2 daniel.vasata@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Prohledávání do šířky = algoritmus vlny
 Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
Prohledávání do šířky = algoritmus vlny - souběžně zkoušet všechny možné varianty pokračování výpočtu, dokud nenajdeme řešení úlohy průchod stromem všech možných cest výpočtu do šířky, po vrstvách (v každé
IV. Základní pojmy matematické analýzy IV.1. Rozšíření množiny reálných čísel
 Matematická analýza IV. Základní pojmy matematické analýzy IV.1. Rozšíření množiny reálných čísel na množině R je definováno: velikost (absolutní hodnota), uspořádání, aritmetické operace; znázornění:
Matematická analýza IV. Základní pojmy matematické analýzy IV.1. Rozšíření množiny reálných čísel na množině R je definováno: velikost (absolutní hodnota), uspořádání, aritmetické operace; znázornění:
Bezkontextové jazyky 2/3. Bezkontextové jazyky 2 p.1/27
 Bezkontextové jazyky 2/3 Bezkontextové jazyky 2 p.1/27 Transformace bezkontextových gramatik Bezkontextové jazyky 2 p.2/27 Ekvivalentní gramatiky Definice 6.1 Necht G 1 a G 2 jsou gramatiky libovolného
Bezkontextové jazyky 2/3 Bezkontextové jazyky 2 p.1/27 Transformace bezkontextových gramatik Bezkontextové jazyky 2 p.2/27 Ekvivalentní gramatiky Definice 6.1 Necht G 1 a G 2 jsou gramatiky libovolného
AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]
![AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]](/thumbs/93/113072660.jpg "AB = 3 CB B A = 3 (B C) C = 1 (4B A) C = 4; k ]") 1. část 1. (u 1, u 2, u, u 4 ) je kladná báze orientovaného vektorového prostoru V 4. Rozhodněte, zda vektory (u, 2u 1 + u 4, u 4 u, u 2 ) tvoří kladnou, resp. zápornou bázi V 4. 0 2 0 0 0 0 0 1 0 2 0
1. část 1. (u 1, u 2, u, u 4 ) je kladná báze orientovaného vektorového prostoru V 4. Rozhodněte, zda vektory (u, 2u 1 + u 4, u 4 u, u 2 ) tvoří kladnou, resp. zápornou bázi V 4. 0 2 0 0 0 0 0 1 0 2 0
Kybernetika a umělá inteligence, cvičení 10/11
 Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
Kybernetika a umělá inteligence, cvičení 10/11 Program 1. seminární cvičení: základní typy klasifikátorů a jejich princip 2. počítačové cvičení: procvičení na problému rozpoznávání číslic... body za aktivitu
A STEJNOLEHLOST,, EUKLIDOVYE VĚTY 2.
 PODOBNOST A STEJNOLEHLOST,, EUKLIDOVYE VĚTY 2. ČÁST MAT. OT 2. OT. Č.. 15: SHODNÁS HODNÁ ZOBRAZENÍ V ROVINĚ, PODOBNOST A STEJNOLEHLOST,, EUKLIDOVYE VĚTY PODOBNOST KDE LÁTKU NAJDETE Kapitola Základy planimetrie
PODOBNOST A STEJNOLEHLOST,, EUKLIDOVYE VĚTY 2. ČÁST MAT. OT 2. OT. Č.. 15: SHODNÁS HODNÁ ZOBRAZENÍ V ROVINĚ, PODOBNOST A STEJNOLEHLOST,, EUKLIDOVYE VĚTY PODOBNOST KDE LÁTKU NAJDETE Kapitola Základy planimetrie
x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.
![x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.](/thumbs/83/87395437.jpg "x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.") 1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
Detekce kartografického zobrazení z množiny bodů
 Detekce kartografického zobrazení z množiny bodů Tomáš Bayer Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta, Univerzita Karlova v Praze, Albertov 6, 120 78, Praha 2, Česká republika,
Detekce kartografického zobrazení z množiny bodů Tomáš Bayer Katedra aplikované geoinformatiky a kartografie, Přírodovědecká fakulta, Univerzita Karlova v Praze, Albertov 6, 120 78, Praha 2, Česká republika,
Trojúhelník a čtyřúhelník výpočet jejich obsahu, konstrukční úlohy
 5 Trojúhelník a čtyřúhelník výpočet jejich obsahu, konstrukční úlohy Trojúhelník: Trojúhelník je definován jako průnik tří polorovin. Pojmy: ABC - vrcholy trojúhelníku abc - strany trojúhelníku ( a+b>c,
5 Trojúhelník a čtyřúhelník výpočet jejich obsahu, konstrukční úlohy Trojúhelník: Trojúhelník je definován jako průnik tří polorovin. Pojmy: ABC - vrcholy trojúhelníku abc - strany trojúhelníku ( a+b>c,
ÚLOHY S POLYGONEM. Polygon řetězec úseček, poslední bod je totožný s prvním. 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU
 ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
Vícerozměrné statistické metody
 Vícerozměrné statistické metody Shluková analýza Jiří Jarkovský, Simona Littnerová FSTA: Pokročilé statistické metody Typy shlukových analýz Shluková analýza: cíle a postupy Shluková analýza se snaží o
Vícerozměrné statistické metody Shluková analýza Jiří Jarkovský, Simona Littnerová FSTA: Pokročilé statistické metody Typy shlukových analýz Shluková analýza: cíle a postupy Shluková analýza se snaží o
Matematika I 12a Euklidovská geometrie
 Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Křivky a plochy technické praxe
 Kapitola 7 Křivky a plochy technické praxe V technické praxi se setkáváme s tím, že potřebujeme křivky a plochy, které se dají libovolně upravovat a zároveň je jejich matematické vyjádření jednoduché.
Kapitola 7 Křivky a plochy technické praxe V technické praxi se setkáváme s tím, že potřebujeme křivky a plochy, které se dají libovolně upravovat a zároveň je jejich matematické vyjádření jednoduché.