DZDDPZ6 Filtrace obrazu. Doc. Dr. Ing. Jiří Horák - Ing. Tomáš Peňáz, Ph.D. Institut geoinformatiky VŠB-TU Ostrava
|
|
|
- Vlasta Štěpánková
- před 7 lety
- Počet zobrazení:
Transkript



1 DZDDPZ6 Filtrace obrazu Doc. Dr. Ing. Jiří Horák - Ing. Tomáš Peňáz, Ph.D. Institut geoinformatiky VŠB-TU Ostrava
2 Prostorová zvýraznění - filtrace Ohnisková operace, použití pohyblivého okénka (kernel), vypočítá se nová hodnota ve středu okna a zapíše se do výsledného obrazu Celý obraz se systematicky (např. po řádcích) prochází a kolem sledovaného bodu se zkoumá malé okolí
3 spatial frequency Prostorová frekvence charakteristika digitálního obrazu popisuje rychlost změny hodnot v poli v závislosti na vzdálenosti (je měřítkově závislá) nulová nízká vysoká prostorová frekvence prostorová frekvence prostorová frekvence zero spatial frequency low spatial frequency high spatial frequency
 - čtvercový, případně kruhový (čtvercový s")
 Okrajové pixely obrazu - nejsou ve výstupním obraze (prázdná hodnota")
4 Konvoluce konvoluce - pohyb okna po jednom pixelu v celé ploše obrazové matice Tvar filtračního okna (konvoluční maska, jádro) - čtvercový, případně kruhový (čtvercový s prázdnými rohy), nepravidelný čtvercový velikost 3x3, 5x5, atd. (zpravidla lichý počet) Okrajové pixely obrazu - nejsou ve výstupním obraze (prázdná hodnota nebo zmenšení rastru) nebo se replikují hodnoty
5 Filtrace doplnění Filtrace obvykle nepoužívá specifické znalosti o obraze. Obtížné - známé okolí právě zpracovávaného bodu je malé. Pokud je apriorní informace o obrazu k dispozici (známé statistické parametry šumu), lze toho v algoritmu využít. Při filtraci nezískáme z hlediska Shannonovy teorie žádnou novou informaci. Můžeme jen některou informaci potlačit nebo zvýraznit. Potřebujeme-li zvýšit celkový informační obsah obrazu, potom musíme zlepšit postup jeho pořízení.

6 Příprava uživatelských filtrů ERDAS

7 Příprava uživatelských filtrů TNTmips
8 Lokální filtrace Lze rozlišit lineární a nelineární metody. lineární operace počítají hodnotu ve výstupním obraze jako lineární kombinaci hodnot vstupního obrazu v malém okolí O reprezentativního pixelu. Uplatnění konvolučního vzorce. Nelineární metody - neuplatní konvoluční vzorec. Medián, rotující okno apod.
9 Konvoluční vzorec (Convolution Formula) V f ijdij q q i 1 j 1 F f ij = koeficient konvolučního filtru na pozici i,j (ve filtru) d ij = DN obrazového elementu, který odpovídá f ij q = rozměr filtru (je-li q = 3, má filtr 3x3 hodnot) F = součet koeficientů filtru (ošetření dělení nulou: F=0 => F = 1) V = hodnota výstupního pixelu (v případě, že V<0, => V = nula)
 + (-1x6) + (-1x2) + (16x) + (-1x6) + (-1x2) + (-1x2) + (-1x) : (-1 + -1 + -1 + -1 + 16 + (-1 + -1 + -1 + -1 )) = = int((12-40) : (16-)) = int(/) = int(11) =")
10 Aplikace lineárního konvolučního filtru Convolution Kernel Input Data Convolution Filtering integer((-1x) + (-1x6) + (-1x6) + (-1x2) + (16x) + (-1x6) + (-1x2) + (-1x2) + (-1x) : ( ( )) = = int((12-40) : (16-)) = int(/) = int(11) = 11
 lze rozložit na součin jednorozměrných masek, což vede ke snížení počtu násobení a")
11 Zrychlení výpočtů - rozklad Separabilita filtrů - konvoluční masku v p- rozměrném okolí (obvykle p=2 nebo 3) lze rozložit na součin jednorozměrných masek, což vede ke snížení počtu násobení a součtů
12 Zrychlení výpočtů opak.užití Rekurentní (rekurzivní) filtry při běžné konvoluci se vypočtené hodnoty při posunu konvoluční masky ukládají do výstupního obrazu a pro vstup se používají původní nezměněné hodnoty. Při rekurentním filtru - jako vstupní hodnoty pro konvoluci jsou použity hodnoty vypočtené v předchozí poloze masky (jen její části, která je již naplněna novými hodnotami).
13 Příklad nejjednoduššího rekurentního filtru Aritmetický průměr jednorozměrný s (2n+1) body (n od středu na každou stranu) Výpočet: Porovnejte f(x) a f(x-1), většina prvků je stejných, pouze 1 přebývá a 1 chybí takže k f(x-1) se pouze chybějící přidá a přebývající odečte Upravený zápis výpočtu (využití výpočtu v předchozím bodě):
14 Lokální filtrace Zvýraznění obrazu: Nízkofrekvenční filtry, f. s nízkou propustností průměrují a vyhlazují, zdůrazňují nízké frekvence, potlačování šumu Vysokofrekvenční filtry, f. s vysokou propustností zostřují obraz, zdůrazňují vysoké frekvence. Hranové operátory. Zvýrazňování kontrastu mezi objekty a pozadím. Využití mimo zvýraznění obrazu: postklasifikační filtrace - úprava výsledků klasifikace. Nízkofrekvenční f.
15 Vyhlazování obrazu Průměrování více obrazů - nejsnadnější vyhlazování náhodného šumu, pokud máme několik obrazů téže scény, které se liší právě šumem. Průměrování hodnoty pixelu o stejných souřadnicích přes více obrázků. NEJDE o filtraci. Nízkofrekvenční filtrace pouze jediný obraz. Spoléháme na nadbytečnost údajů v obraze. Sousední pixely mají převážně tutéž nebo blízkou hodnotu jasu. Hodnotu obrazových elementů zkreslených šumem potom můžeme opravit na základě analýzy hodnot jasu v jeho vybraném okolí. Hodnota jasu reprezentativního pixelu je nahrazena hodnotou typického reprezentanta mezi hodnotami v okolí nebo kombinací několika hodnot.
16 Nízkofrekvenční filtry
17 Nízkofrekvenční filtrace Low-Frequency Filtering potlačení vysokofrekvenční informace (redukce DN centrálního pixelu vzhledem k okolí) redukce rozsahu výstupních hodnot odstínů šedi => nutnost zvýraznění kontrastu závislost shlazování na velikosti (rozměru) filtru - větší filtry více shlazují
18 Lineární metody vyhlazování Lineární metody vyhlazování počítávají novou hodnotu aktuálního pixelu jako lineární kombinaci hodnot ze zvoleného okolí. Při zpracování skutečných obrazů je předpoklad linearity narušen díky tomu, že hodnota obrazové funkce (jas, intenzita) je nezáporná a omezená. Podobně jsou obrazy ohraničeny v prostoru, a tak předpoklad prostorové invariantnosti platí jen pro omezené posuny konvolučních masek. Budeme-li uvažovat Fourierovu transformaci, potom je konvoluce ekvivalentně vyjádřena jako součin Fourierova obrazu signálu a Fourierova obrazu konvolučního filtru.
19 Nízkofrekvenční filtry Průměrový filtr v okně spočítáme aritmetický průměr, zaokrouhlíme na celé číslo a zapíšeme do centrální buňky (v druhé vrstvě) ), ( 9 1 ), ( k l l j k i f j i p Dobrovolný
20 Průměrový filtr shlazovací filtr nahrazuje původní DN pixelu průměrnou hodnotou nad určitým okolím odstraní chyby (degradace) v obraze vhodný pro potlačování šumu v rozsáhlých homogenních plochách nevhodný pro potlačování šumu v urč. typech nehomogenních ploch (viz obr.), likviduje hrany (liniové elementy) filtraci lze opakovat
21 Průměrový filtr (vhodné použití) ideální obraz degradovaný obraz opravený obraz znehodnocení obrazu rekonstrukce obrazu
22 Průměrový filtr (nevhodné použití) ideální obraz degradovaný obraz opravený obraz znehodnocení obrazu rekonstrukce obrazu průměrováním rozostřuje hrany
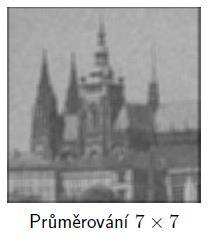
23 obraz před filtrací Průměrový filtr
24 Průměrový filtr 3x3 obraz po filtraci

25 Hlaváč Obyčejné průměrování
 p( i,")
26 p( i, j) k1l 1 f ( i k, j l) p( i, j)
27 Dobrovolný
28 Nelineární vyhlazování nelineární filtrační metody - částečně eliminují potíže s rozmazáváním hran výběr homogenní oblasti - v analyzovaném okolí se snaží najít tu jeho část (oblast o zhruba konstantním DN), do které reprezentativní bod patří Jen pixely této oblasti se využijí pro hledání hodnoty (např. aritmetickým průměrem nebo výběrem DN hodnoty jednoho pixelu), která bude reprezentovat celé okolí ve výstupním obrázku. Je přirozené hledat reprezentanta jen uvnitř objektu, což předpokládá nelineární operaci - výběr.
29 Nelineární vyhlazování - metody Průměrový filtr s rotujícím oknem Nejbližší soused Obyčejné průměrování s omezením změn hodnot Filtrace mediánem Modální filtrace Sieve filtr Průměrování pro liniové prvky s rotujícím oknem Průměrování s inverzním gradientem Gaussův filtr
30 Metoda rotující masky Kolem reprezentativního bodu rotuje malá maska, např 3x3. Možných poloh masky je (+ středová = 9). V každé masce se spočte rozptyl hodnot. Za homogenní okolí reprezentativního bodu se vybere maska s nejmenším rozptylem. Nová hodnota reprezentativního bodu může být dána aritmetickým průměrem hodnot ve vybrané masce = průměrový filtr s rotujícím oknem.
31 Metoda rotující masky lze použít iterativně proces poměrně rychle konverguje do stabilního stavu, kdy se již obraz dále nemění. Velikost a tvar masek ovlivňuje rychlost konvergence. Čím menší jsou masky, tím menší jsou změny a tím více iterací je potřeba.
32 Průměrový filtr s rotujícím oknem Využívá metodu rotující masky vyhlazovací filtr výhoda - předpovídá přítomnost hran v obraze a zachovává je Metoda nerozmazává hrany obrazu, má dokonce mírně ostřící charakter. nevýhoda - odstraňuje liniové prvky
33 Průměrový filtr s rotujícím oknem nevhodné použití likviduje liniové prvky obraz s liniovým prvkem filtrovaný obraz ????????????????????????? průměrová filtrace rotujícím oknem
34 Nejbližší soused Pro průměrování se použijí jen ty pixely, jejichž rozdíl v DN od zpracovávaného pixelu je menší než stanovená hranice Průměr se tedy vypočte jen z blízkých hodnot, nízký rozptyl
35 Obyčejné průměrování s omezením změn hodnot využívá obyčejného průměrování, ale brání rozmazání hran povolením pouze určitého intervalu rozdílu mezi DN původního bodu a výsledkem průměrování. Pokud je rozdíl menší než předem zvolený práh, použije se výsledek průměrování; jinak se původní hodnota nezmění. Metoda se používá pro opravu velkoplošných chyb bez vlivu na zbytek obrazu nebo pro jednoduché vyhlazení bez poškození hran.
36 Fitrace mediánem nová hodnota stanovena z definovaného okolí jako medián medián prostřední člen uspořádané posloupnosti čísel aby se snadno určil prostřední prvek, používají se posloupnosti s lichým počtem prvků (3x3, 5x5) potlačuje lokální šum a redukuje rozmazání hran filtraci mediánem lze použít iterativně Hlavní nevýhodou filtrace mediánem v obdélníkovém okolí je to, že porušuje tenké čáry a ostré rohy v obraze. Tento nedostatek se dá obejít, když se použije jiný tvar okolí ,3,5,5,6,7,9,10, MEDIÁN =
37 Hlaváč Filtrace mediánem

38 Módová filtrace
39 Sieve filtrace Zadává se maxim. velikost polygonu (počet pixelů), který se má eliminovat
40 Průměrování pro liniové prvky Používá se při přítomnosti linií a hran v obraze, které jsou důležité Prosté průměrování ničí lineární prvky Používají se: varianty rotující okna výpočty gradientů výpočty rozptylů apod.
41 Průměrování pro liniové prvky - filtr s rotujícím oknem (2. varianta) Aplikují se 4 masky (rotující okno) - vynásobí se s obrazem Ze 4 součinů se vybere minimální Taková váhová matice (okno) se následně použije pro průměrování
42 Průměrování pro liniové prvky - průměrování s inverzním gradientem Gradient určí směr možné linie v obrazu Podle tohoto směru se vybere vhodný postup průměrování Např. využití Robertsova gradientu
43 Průměrování s inverzním gradientem Robertsův gradient pravděpodobnost výskytu hrany g( i, j) max{ f ( i, j) f ( i 1, j 1), f ( i 1, j) f ( i, j 1) } f(i,j) = hodnota šedi g(i,j) = Robertsův gradient
44 Průměrování s inverzním gradientem mírné rozostření hran přerozdělení vah koeficientů - eliminace vlivu bodů na hranách při výpočtu hodnoty váha příspěvku pro bod: výsledná filtrovaná hodnota pro obrazový bod: ), ( ), ( max j i g grad j i ), ( ), ( )., ( ), ( k l k l F l j k i l j k i l j k i f j i f
45 Časté využití Gaussův filtr Filtrace s váhovými koeficienty odvozenými z Gaussovy funkce V Jednoduchá varianta pro 3x p( i, j) V ( i, j)* p( i, j) 9 k1l 1 Zpravidla nedostatečná aproximace Gaussovy křivky, pro dostatečně přesnou aproximaci se doporučuje jádro o velikosti šestinásobku parametru σ (má význam směrodatné odchylky odpovídající normální distribuce)
46 Gaussův filtr Pro malá σ se používá realizace pomocí konvoluce. Konvoluční jádro je separabilní a lze rozložit na 2 konvoluce s jednorozměrnými jádry. Redukce nárůstu časové náročnosti s rozměrem jádra z kvadratické na lineární závislost. Nejdříve se počítá konvoluce ve směru X a pak konvoluce ve směru Y. Urychlení výpočtu pro velká σ: pomocí Fourierovy transformace (konvoluci lze převést na násobení ve Fourierově doméně) Pomocí rekurentních filtrů - vhodnější
47 Vysokofrekvenční filtry
48 Vysokofrekvenční filtry High-Frequency Filters, High-Pass Filters potlačení nízkofrekvenční informace (zvětšení rozdílu hodnoty centrálního pixelu vůči okolí) zvětšení rozsahu výstupních hodnot odstínů šedi zvýšení prostorové frekvence obrazového záznamu
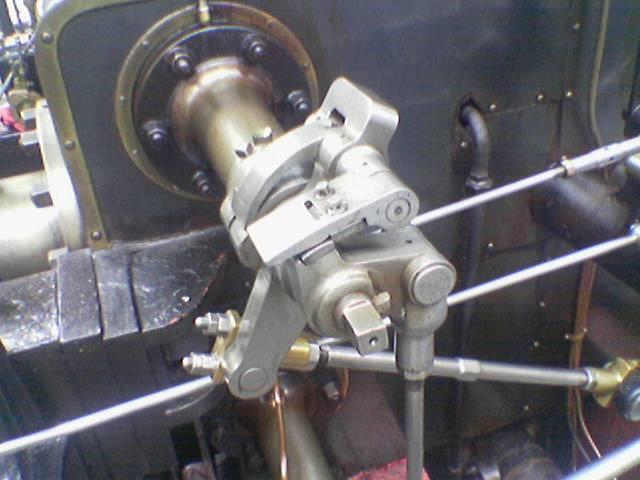
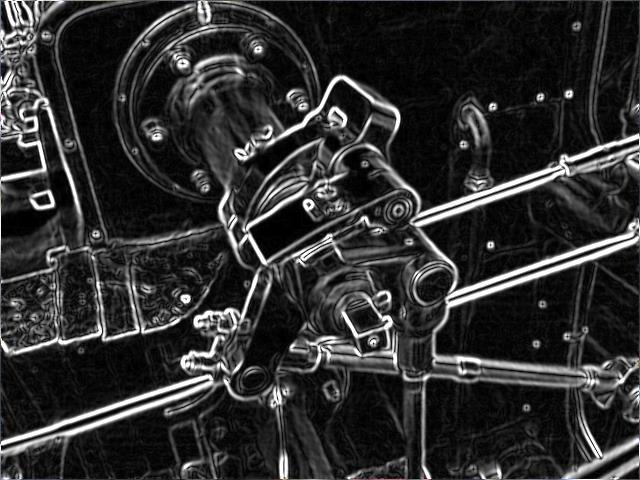
49 Vysokofrekvenční filtrace - užití detekce a zvýraznění hran (Edge Enhancer) a linií - příprava pro vektorizaci ostření (sharpening) obrazu zdůraznění objektů a jevů v obraze menších než polovina filtrovacího okna potlačení objektů a jevů v obraze větších než polovina filtrovacího okna
50 Hrana (Edge) vs. linie (Line) diskontinuity obrazové funkce (v šedotónovém obraze) výrazná příp. skoková změna hodnot obrazového záznamu Hrana - hranice mezi dvěma různými povrchy, teoreticky nulová šířka Linie úzká oboustranná hrana Obecně - za hranu můžeme považovat ta místa obrazu, kde má obrazová funkce g průběh podle následujícího obrázku
51 Typy hran DN Value DN Value slope DN change 90 0 DN change Slope midpoint Ramp edge x or y x or y Step edge (stupňovitá) DN Value width DN change Line x or y DN Value Width near 0 DN Value Width near 0 DN change DN change Roof edge (střechovitá) x or y světlá linie na tmavém pozadí x or y Ditch edge (příkopová) tmavá linie na světlém pozadí
52 Proč se zajímat o hrany? významné složky obrazu je to hledaná informace: detekce hran a linií (Edge and Line Detection) zvýraznění hran a linií (Edge and Line Enhancement)
53 Problémy hran Problém přesného určení polohy: 1. příliš široká oblast, ve které dochází ke změně intenzity. Hrana - celá tato oblast? Nebo střed této oblasti? 2. všudypřítomný šum. Která ze změn intenzity je hrana a která je dána šumem? Šumu se zbavíme vhodným předzpracováním, buď pomocí nějakého lineárního nízkofrekvenčního filtru (např. Gaussova filtru), nebo pomocí nelineárního filtru (např. medián). Hrana = oblast na hranicích dvou sousedních textur. Těžko detekovatelné pomocí klasických metod založených na první či druhé derivaci, které naleznou hrany uvnitř textur a ne hranici mezi dvěma různými texturami. Nutno použít jiné metody, např. srovnávání se vzorem nebo některou ze statistických metod Problém u multispektrálního obrazu hrana v každé části spektra nebo jen v některé?
54 Hrany v multispektrálním a barevném obrazu bod reprezentován vektorem hodnot multispektrální obraz - nespojitost jasu (váhový součet jasů z jednotlivých pásem) barevný obraz - nespojitost barev (vyjádření na základě určitého poměru hodnot z pásem)
55 Ztenčování hran angl. Parallel Thinning Používá se při extrakci hran Linie nemá šířku 1 pixelu Známá orientace hran - zkoumání kolmo na směr, nejvyšší hodnota se považuje za osu hrany, ostatní se nastaví na 0. Neznámá orientace okno 3x3, zkoumá se, zda není středový pixel zbytečný, pak se nastaví 0
56 Přehled typů vysokofrekvenčních filtrů Ostřící operátory (Edge Enhancers) Hranové detektory (Edge Detectors) tzv. Zero-Sum Kernels Sobelův filtr filtr Prewitové Laplaceův operátor Cannyho detektor. diferenční filtry (High Pass Differential Filters) Edge Sharpening Filter
57 Dobrovolný
58 Zvýraznění hran (prohloubení minima) vstupní obrazová filtr výstupní obrazová data (ostřící operátor) data
59 Zvýraznění hran (zvýšení maxima) vstupní obrazová filtr výstupní obrazová data (ostřící operátor) data

60 obraz před filtrací High Pass filter
61 TNTmips High Pass filtr (3 x 3) 0,5 0,5 0,5 0,5 5,5 0,5 0,5 0,5 0,5 3 x 3
 obraz po")
62 High Pass filter (3x3) obraz po filtraci
63 High Pass filtr (5 x 5) - příklad TNTmips 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 15,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 5 x 5
 obraz po")
64 High Pass filter (5x5) obraz po filtraci
65 Hrany v obraze Hrana - náhlá změna hodnota obrazové funkce. Matematickým nástrojem pro studium změn funkce dvou proměnných jsou parciální derivace. Změnu funkce udává její gradient. Rozlišujeme směr a velikost gradientu. Gradientní operátory velikosti: Operátory aproximující derivace pomocí diferencí. Některé operátory jsou invariantní vůči rotaci, např. Laplaceův operátor a mohou být počítány konvolucí s jedinou maskou. Jiné aproximující operátory využívají několik masek odpovídajících příslušné orientaci. Z nich se vybere ta, která nejlépe lokálně aproximuje obrazovou funkci. Výběrem jedné z masek je určen i směr gradientu (orientace). Operátory založené na hledání hrany v místech, kde druhá derivace obrazové funkce prochází nulou (angl. zero-crossing). Příkladem je Marrův- Hildrethové operátor a Cannyho hranový detektor. Operátory snažící se lokálně aproximovat obrazovou funkci poměrně jednoduchým parametrickým modelem. Např. polynom dvou proměnných.
66 Metody založené na první derivaci V místech, kde se nachází hrana, dochází k největší změně intenzity, zatímco v homogenních oblastech je změna a tedy i první derivace rovna nule. Metodám první derivace se též říká gradientní metody. Provedeme-li parciální derivace obrazu podle x a podle y, získáme vektor udávající velikost a směr gradientu. Gradient je vektor kolmý na vektor udávající směr hrany. Velikost hrany a úhel, který hrana svírá s osou x:
67 Metody založené na první derivaci derivace se pro diskrétní obrazovou funkci počítá těžko aproximovat vhodným výpočtem diferenciálu Nejčastěji se pro výpočet diferenciálu používá Centrální diferenciální rovnice, kde funkce O udává řád chyby výpočtu
68 Hranové operátory Jednodušší než derivace je použití hranových operátorů Hranový operátor je konvoluční jádro. Provedeme-li konvoluci obrazu s tímto jádrem, tak jako výsledek obdržíme hledanou složku gradientu. Suma vah =0 Detekce hrany ve směru 0 (Prewittové, Sobelův), u dalších analogicky
69 Hranové operátory (Zero-Sum Kernels) váha středového členu = součet vah sousedních členů výsledek filtrace: DN = 0 - pro homogenní plochy (žádné hrany) DN nízké - pro plochy s nízkou prostorovou frekvencí DN vysoké, extrémní - pro plochy s vysokou prostorovou frekvencí
70 Hranové operátory

71 Hranové operátory Gradient skalárního pole je vektorové pole ukazující směr největšího nárůstu hodnot skalárního pole jehož velikost odpovídá největší změně hodnot skalárního pole
72 Hranové operátory gradient - míra přítomnosti hrany v obrazovém bodu (i,j) 2 ), ( 2 ), ( ), ( ) ( ) ( j i y j i x j i f f grad ) 1, ( ), ( ), ( j i j i j i x f f f 1), ( ), ( ), ( j i j i j i y f f f ).. ( ), ( ), ( 1 j i x j i y f f tg φ = směr procházející hrany i, j i-1, j i, j-1 Δy Δx
73 Robertsův hranový detektor hran angl. Roberts Cross Edge Detector výsledky ovlivněny šumem malé okolí pro směr X 1 0 pro směr Y Robertsův gradient
74 Zjednodušený Robertsův hranový detektor zjednodušený Robertsův gradient ) 1, ( ) 1, ( 1) 1, ( ), ( ), ( j i j i j i j i j i f f f f grad P 1 P 2 P 3 P ), ( P P P P grad j i

75 Robertsův hranový detektor hran ukázka
76 Dobrovolný
77 Wiki

78 Sobelův hranový detektor hran ukázka funkce
79 Hranové operátory jedná se v zásadě o variace na Centrální diferenciální rovnici. Lépe vidět ze separace jader pro Sobelův a Prewittův operátor. Sobelův operátor = výsledek konvoluce mezi Centrální diferenciální rovnicí (diference horizontálně) a jednoduchou aproximací Gaussova nízkofrekvenčního filtru (vertikálně vyhlazení). Prewittové operátor - místo Gaussova filtru použito průměrovací jádro. Tyto operátory používají v jednom směru výpočet diferenciálu a ve směru kolmém používají filtry na potlačení vlivu šumu. Výsledek je lepší, než kdyby se napřed celý obraz rozmazal v obou směrech a teprve na tomto rozmazaném obraze se prováděl výpočet gradientu. Separability se využívá pro větší efektivitu výpočtu, neboť výpočet konvoluce se dvěma 1D jádry je časově méně náročný než s jedním 2D jádrem, což platí pro všechna jádra větší než 2x2 gradientu.
80 Algoritmus vymezení hran 1. pro každý bod vypočítej x-ovou složku gradientu g x 2. pro každý bod vypočítej y-ovou složku gradientu g y 3. pro každý bod vypočítej velikost gradientu 4. prahuj velikost gradientu s vhodným prahem T Nedostatek - vytváří příliš tlusté hrany, takže ani nevíme, kde přesně se daná hrana nachází. Řešení - Cannyho detektor.
81 Metody založené na druhé derivaci nepotřebujeme nutně znát směr a velikost hran pouze informace, kde se dané hrany nacházejí metody využívající druhé derivace v místech, kde dochází k největší změně intenzity a tedy je největší první derivace, druhá derivace prochází nulou.
82 Určení hran založené na druhé derivaci Výpočet druhé derivace je možné provést dvojím použitím výpočtu první derivace. Pro diskrétní funkci kde funkce O udává řád chyby výpočtu Další možností je použít některý z hranových operátorů počítajících druhou derivaci. Laplaceovy operátory - používají jako konvoluční jádro vhodnou aproximaci druhé derivace Gaussova filtru. c značí normalizační člen - zajistí, aby výsledné konvoluční jádro mělo součet svých elementů roven nule
83 Laplaceovy operátory - LoG Laplaceovy operátory členy obecnější rodiny hranových operátorů LoG (Laplacian of Gaussian). Laplaceovy operátory - kladou důraz na středové body a součet všech jejich prvků je vždy roven nule. Mexický klobouk (Mexican hat) Filtr produkuje na výstupu nulové hodnoty v homogenních částech obrazu. Zvyšuje nebo naopak snižuje hodnoty pixelů, jejich hodnota je v originálním obraze větší (resp. menší) než hodnota okolních pixelů.
84 Laplaceovy operátory - LoG výhoda LoG - možnost volby velikosti jádra. Velikost jádra má vliv na jeho citlivost. Čím větší jádro, tím větší odolnost proti šumu. Také hrany, které detekujeme, závisí na velikosti jádra. Správná volba velikosti jádra je důležitá pro kvalitní výsledek. Velikost jádra by měla odpovídat velikosti detailů, které ještě chceme naším detektorem zachytit (zdůraznění objektů v obraze menších než polovina filtrovacího okna). nevýhoda LoG - neseparabilita. S velikostí jádra rychle roste i časová náročnost výpočtu konvoluce s tímto jádrem. Možnost řešení časové náročnosti pro velká jádra - využití rekursivních filtrů, které LoG aproximují. Využití: Filtr produkuje na výstupu nulové hodnoty v homogenních částech obrazu. Zvyšuje nebo naopak snižuje hodnoty pixelů, jejich hodnota je v originálním obraze větší (resp. menší) než hodnota okolních pixelů. Mapa hran (viz dále)
85 Rozdíl 2 Gaussových filtrací - DoG Jiná možnost aproximace 2.derivace DoG (difference of Gaussian) Na obraz se aplikuje 2x Gaussův filtr; jednou s větším parametrem sigma (sigma2) (směrodatná odchylka normální distribuce) a jednou s menším sigma (sigma1). Doporučuje se volit sigma tak, aby poměr sigma2/sigma1=1.6 (je to vhodná aproximace LoG) Výsledné obrazy se od sebe odečtou:

86 Vytvoření mapy hran prahováním postup jak z druhé derivace vytvořit mapu hran = najít místa, kde druhá derivace prochází nulou. Nejjednodušší způsob - prosté prahování. Každý bod s hodnotou nula označit jako hranový bod. Nevýhody: 1. obrazová funkce má druhou derivaci nulovou i v místech, kde má nulovou první derivaci, tedy i uprostřed homogenních oblastí. Prahování tedy za hranové označí i body, které hranové vůbec být nemusejí. 2. k průchodu nulou nemusí nutně docházet v nějakém pixelu, nýbrž mezi dvěma sousedními pixeli. Pak prahovací technika hranové body vůbec nezaznamená.
87 Vytvoření mapy hran s maskou Lépe vyhledávání bodů, ve kterých dochází ke změně znaménka. Vytvoří se maska velikosti 2x2, která se postupně přikládá na všechny body obrazu. Levý horní prvek se bere jako střed masky (a). Tento prvek se porovnává s ostatními prvky. Pokud se znaménko tohoto prvku (a) liší od znaménka některého z ostatních prvků masky, je daný bod (a) označen jako hranový. Masky lze použít ještě k obdobě prahování: bod je označen za hranový jen, pokud je rozdíl hodnot větší než stanovený limit, tj. je splněna ještě dodatečná podmínka: Má-li (a) a např. (b) různá znaménka, musí zároveň platit, že kde T je předem definovaný práh
88 Výhody a nevýhody 2.derivace Nevýhody metody druhé derivace (oproti metodám první derivace): vyšší citlivost na šum větší časová náročnost pro velké rozměry masky Výhoda metody druhé derivace: mapa hran obsahuje pouze tenké a uzavřené hrany. Pokud použijeme variantu s prahováním, výsledné hrany zpravidla uzavřené nejsou.

89 Cannyho detektor J. F. Canny stanovil vlastnosti ideálního hranového detektoru: Minimální chyba detekce hran: Všechny důležité hrany musí být detekovány a nesmí být detekovány žádné falešné hrany. Správná lokalizace: Vzdálenost mezi skutečnou a detekovanou hranou musí být co nejmenší. Pouze jedna odezva: Každá hrana musí být detekovaná pouze jednou. Cannyho detektor by se dal zařadit mezi metody využívající první derivaci. Pro výpočet mapy hran je potřeba znát nejen velikost gradientu, ale i směr.
90 Algoritmus Cannyho hranový detektor 1. Vytvoř 1D konvoluční jádro G σ Gaussova filtru o zadané velikosti sigma (vstupní parametr). 2. Rozmaž obraz jádrem G σ podle osy y a výsledek ulož do G x. Spočítej první derivaci G x podle osy x a výsledek ulož do g x. (Sobelův operátor v 1. ose) 3. Rozmaž obraz jádrem G σ podle osy x a výsledek ulož do G y. Spočítej první derivaci G y podle osy y a výsledek ulož do g y. (Sobelův operátor v 2. ose) 4. Spočítej amplitudu (Sobelův gradient) 5. Ztenči obraz hran podle směru gradientu (Nonmaxima suppression) (při výpočtu 1.derivace vznikají tlusté hrany) 6. Proved hysterezní prahování s prahy T L a T H (vstupní parametry)
91 Nonmaxima suppression zvláštní poloprahovací technika ztenčení Předpoklad - hrana dává největší odezvu v místě, kde se skutečně nachází. Algoritmus - Pro každý bod b obrazu proved : 1. Urči jeho sousedy r a l ležící ve směru gradientu 2. Je-li b < r nebo b < l, pak přiřad b = 0, jinak neprováděj nic. Tento krok rozpojí hrany v místech, kde jsou křižovatky tvaru T. K rozpojení dojde proto, že vždy je jedna hrana větší než ta druhá. Vliv jejího gradientu je v místě spojení dominantní.

92 Hysterezní prahování snažíme se eliminovat nevýznamné a falešné hrany. ponechá v obraze pouze ty hrany, jejichž gradient alespoň v některých místech dosahuje požadované limitní velikosti T H.

93 Výsledek Cannyho hran.detektoru Výsledná mapa hran obsahuje tenké neuzavřené hrany. Časová náročnost podobná jako u jiných metod založených na první derivaci Výhodné, pokud je Gaussův filtr naprogramován pomocí rekursivního filtru

94 Detekce hran srovnáváním se vzorem (Template matching) Základem metody je nějaká maska, která se přiloží na právě kontrolované místo. Je-li odezva dostatečně veliká, je v daném bodě detekována hrana. Výhody: imunní vůči šumu. Vliv šumu závisí na velikosti masky. schopnost detekovat tzv. variance edge, neboli hrany vznikající na hranicích dvou rozdílných textur. Nevýhody: závislost na orientaci a tvaru masky a hledané hrany. Například maska z obrázku nedokáže nalézt rohy oblastí - časová náročnost výpočtu. Obraz se prochází pixel po pixelu a propočítává se v každém místě maska ze všech možných pootočení. Urychlení: 1. vhodná konstrukce masky a výpočtu její odezvy. Nemusí se vždy přepočítávat celá maska, ale pouze ta část, ve které došlo k nějaké změně při jejím otočení či posunutí. 2. nalézt si například gradientní metodou místa pravděpodobného výskytu a orientace hrany a provádět výpočet pouze pro tato místa a tyto orientace.

95 Detekce hran statistickými metodami podobné metodám srovnávání se vzorem je dáno nějaké jádro, jehož středem je zkoumaný bod. Pro toto jádro je předdefinovaná nějaká funkce, která se spočítá z bodů spadajících do jádra. Z výsledku je pak možné zjistit, zda se nachází v blízkosti bodu hrana. filtr SUSAN (Smallest Univalue Segment Assimilating Nucleus) Podstatou SUSAN je kruhová maska a funkce: Proměnná x 0 představuje střed masky. Práh T určuje minimální rozdíl, který bude detekovaný. Práh n max představuje nejvyšší možnou hodnotu, které může rovnice nabývat.
96 SUSAN výhody a nevýhody Filtr SUSAN patří mezi nelineární filtry. Hrany a rohy detekované pomocí SUSAN odpovídají místům s nejnižší hodnotou. Výhody veliká odolnost vůči šumu. Není potřeba žádné předzpracování pro odstranění šumu. Schopnost detekovat rohy oblastí Nevýhoda vysoká časová náročnost.
97 Delokalizace hran Při detekci hran nás často zajímají jen skutečně důležité hrany. Pokud je na obrázku zachycena cihlová zed, zpravidla nás zajímá pouze ohraničení zdi a ne hrany všech cihel. Abychom se vyhnuli přílišné přesegmentovanosti obrazu, používá se technika rozostřování. Podobně jako když otáčíme objektivem fotoaparátu působí rozmazávání pomocí Gaussova filtru. Vhodné rozostření způsobí, že nepodstatné hrany zaniknou a my pomocí detektoru hran nalezneme pouze důležité hrany. Velkou nepříjemností, kterou ani Cannyho detektor neřeší, je jev, kterému se říká delokalizace hrany. Použijeme-li Gaussův filtr na odstranění nežádoucích detailů obrazu, jsou detekované hrany posunuté od svých původních pozic. Čím větší průměr Gaussova filtru, tím více se efekt delokalizace projeví.
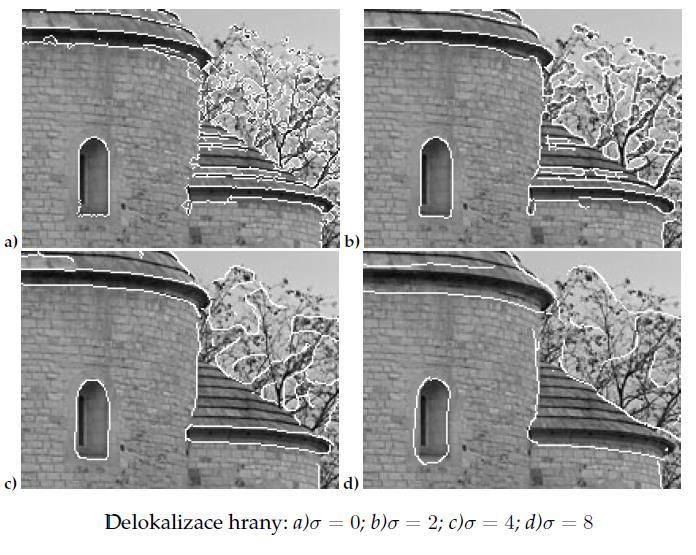
98 Delokalizace hran
99 Delokalizace hran hledání kompromisu mezi přesegmentovaným obrazem a delokalizovanými hranami. Řešení zpravidla využívá myšlenky - při větším rozmazání identifikujeme důležité hrany, ale použijeme hrany detekované při menším rozmazání, které těmto hranám odpovídají. Měřítkový prostor (scale space): Důležitou vlastností rozmazávání Gaussovým filtrem je, že se vzdálenost bodu hrany od skutečné pozice zvětšuje úměrně s velikostí jádra Gaussova filtru. Vytvoří se mapy hran obrazu při postupně se zvětšujícím rozmazání. Vytvoříme intervalový strom (interval tree). Pomocí intervalového stromu lze sestavit nepřesnou hranu z hodně rozmazaného obrazu pomocí přesnějších hran z méně rozmazaného obrazu.
Analýza a zpracování digitálního obrazu
 Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
Analýza a zpracování digitálního obrazu Úlohy strojového vidění lze přibližně rozdělit do sekvence čtyř funkčních bloků: Předzpracování veškerých obrazových dat pomocí filtrací (tj. transformací obrazové
HLEDÁNÍ HRAN. Václav Hlaváč. Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání.
 1/35 HLEDÁNÍ HRAN Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac FYZIOLOGICKÁ MOTIVACE 2/35 Výsledky
1/35 HLEDÁNÍ HRAN Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac FYZIOLOGICKÁ MOTIVACE 2/35 Výsledky
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Diskrétní 2D konvoluce
 ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
ČVUT FEL v Praze 6ACS. prosince 2006 Martin BruXy Bruchanov bruxy@regnet.cz Diracův impuls jednotkový impulz, δ-impulz, δ-funkce; speciální signál s nulovou šířkou impulzu a nekonečnou amplitudou; platí
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
Hledání hran. Václav Hlaváč. České vysoké učení technické v Praze
 Hledání hran Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická, katedra kybernetiky
Hledání hran Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky Fakulta elektrotechnická, katedra kybernetiky
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe. Adam Novozámský (novozamsky@utia.cas.cz)
") NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
Hledání hran. Václav Hlaváč. České vysoké učení technické v Praze
 Hledání hran Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac, vaclav.hlavac@cvut.cz
Hledání hran Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac, vaclav.hlavac@cvut.cz
2010 Josef Pelikán, CGG MFF UK Praha
 Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
Filtrace obrazu 21 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ 1 / 32 Histogram obrázku tabulka četností jednotlivých jasových (barevných) hodnot spojitý případ hustota pravděpodobnosti
ROZ1 - Cv. 3 - Šum a jeho odstranění ÚTIA - ZOI
 Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Šum Co je to šum v obrázku? Šum Co je to šum v obrázku? V obrázku je přidaná falešná informace nahodilého původu Jak vzniká v digitální fotografii? Šum Co je to šum v obrázku? V obrázku je přidaná falešná
Roman Juránek. Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 30
 Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
UNIVERZITA PARDUBICE. 4.4 Aproximace křivek a vyhlazování křivek
 UNIVERZITA PARDUBICE Licenční Studium Archimedes Statistické zpracování dat a informatika 4.4 Aproximace křivek a vyhlazování křivek Mgr. Jana Kubátová Endokrinologický ústav V Praze, leden 2012 Obsah
UNIVERZITA PARDUBICE Licenční Studium Archimedes Statistické zpracování dat a informatika 4.4 Aproximace křivek a vyhlazování křivek Mgr. Jana Kubátová Endokrinologický ústav V Praze, leden 2012 Obsah
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory
 Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004.
 Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
Restaurace (obnovení) obrazu při známé degradaci
 obrazu při známé degradaci") Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
Restaurace (obnovení) obrazu při známé degradaci Václav Hlaváč České vysoké učení technické v Praze Centrum strojového vnímání (přemosťuje skupiny z) Český institut informatiky, robotiky a kybernetiky
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Grafika na počítači. Bc. Veronika Tomsová
 Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
Grafika na počítači Bc. Veronika Tomsová Proces zpracování obrazu Proces zpracování obrazu 1. Snímání obrazu 2. Digitalizace obrazu převod spojitého signálu na matici čísel reprezentující obraz 3. Předzpracování
13 Barvy a úpravy rastrového
 13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
scale n_width width center scale left center range right center range value weight_sum left right weight value weight value weight_sum weight pixel
 Změna velikosti obrázku Převzorkování pomocí filtrů Ačkoliv jsou výše uvedené metody mnohdy dostačující pro běžné aplikace, občas je zapotřebí dosáhnout lepších výsledků. Pokud chceme obrázky zvětšovat
Změna velikosti obrázku Převzorkování pomocí filtrů Ačkoliv jsou výše uvedené metody mnohdy dostačující pro běžné aplikace, občas je zapotřebí dosáhnout lepších výsledků. Pokud chceme obrázky zvětšovat
Kombinatorická minimalizace
 Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Příklady použití tenkých vrstev Jaromír Křepelka
 Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
Geometrické transformace
 1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
1/15 Předzpracování v prostoru obrazů Geometrické transformace Václav Hlaváč, Jan Kybic Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/
Úloha 1. Napište matici pro případ lineárního regresního spline vyjádřeného přes useknuté
 Úloha 1. Napište matici pro případ lineárního regresního spline vyjádřeného přes useknuté polynomy pro případ dvou uzlových bodů ξ 1 = 1 a ξ 2 = 4. Experimentální body jsou x = [0.2 0.4 0.6 1.5 2.0 3.0
Úloha 1. Napište matici pro případ lineárního regresního spline vyjádřeného přes useknuté polynomy pro případ dvou uzlových bodů ξ 1 = 1 a ξ 2 = 4. Experimentální body jsou x = [0.2 0.4 0.6 1.5 2.0 3.0
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U
 M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
M E T O D Y R O Z P O Z NÁNÍ OB J E K T Ů V O B R A Z U CÍLE LABORTATORNÍ ÚLOHY 1. Seznámení se s metodami rozpoznání objektů v obraze 2. Vyzkoušení detekce objektů na snímcích z kamery a MRI snímku ÚKOL
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Úpravy rastrového obrazu
 Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
Přednáška 11 Úpravy rastrového obrazu Geometrické trasformace Pro geometrické transformace rastrového obrazu se používá mapování dopředné prochází se pixely původního rastru a určuje se barva a poloha
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012
 Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012 Metoda nejmenších čtverců Matematicko-statistická metoda používaná zejména při zpracování nepřesných dat (typicky experimentálních empirických
Metoda nejmenších čtverců Michal Čihák 26. listopadu 2012 Metoda nejmenších čtverců Matematicko-statistická metoda používaná zejména při zpracování nepřesných dat (typicky experimentálních empirických
MATEMATIKA V MEDICÍNĚ
 MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Operace s obrazem. Biofyzikální ústav LF MU. Projekt FRVŠ 911/2013
 Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Operace s obrazem Biofyzikální ústav LF MU Obraz definujeme jako zrakový vjem, který vzniká po dopadu světla na sítnici oka. Matematicky lze obraz chápat jako vícerozměrný signál (tzv. obrazová funkce)
Lineární zobrazení. 1. A(x y) = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)
 = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)") 4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
Omezení barevného prostoru
 Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
Úpravy obrazu Omezení barevného prostoru Omezení počtu barev v obraze při zachování obrazového vjemu z obrazu Vytváření barevné palety v některých souborových formátech Různé filtry v grafických programech
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Rastrové digitální modely terénu
 Rastrové digitální modely terénu Rastr je tvořen maticí buněk (pixelů), které obsahují určitou informaci. Stejně, jako mohou touto informací být typ vegetace, poloha sídel nebo kvalita ovzduší, může každá
Rastrové digitální modely terénu Rastr je tvořen maticí buněk (pixelů), které obsahují určitou informaci. Stejně, jako mohou touto informací být typ vegetace, poloha sídel nebo kvalita ovzduší, může každá
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
DZDDPZ3 Digitální zpracování obrazových dat DPZ. Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava
 DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
DZDDPZ3 Digitální zpracování obrazových dat DPZ Doc. Dr. Ing. Jiří Horák Institut geoinformatiky VŠB-TU Ostrava Digitální zpracování obrazových dat DPZ Předzpracování (rektifikace a restaurace) Geometrické
Předzpracování obrazů v prostoru obrazů, operace v lokálním sousedství
 Předzpracování obrazů v prostoru obrazů, operace v lokálním sousedství Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských
Předzpracování obrazů v prostoru obrazů, operace v lokálním sousedství Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských
Popisná statistika kvantitativní veličiny
 StatSoft Popisná statistika kvantitativní veličiny Protože nám surová data obvykle žádnou smysluplnou informaci neposkytnou, je žádoucí vyjádřit tyto ve zhuštěnější formě. V předchozím dílu jsme začali
StatSoft Popisná statistika kvantitativní veličiny Protože nám surová data obvykle žádnou smysluplnou informaci neposkytnou, je žádoucí vyjádřit tyto ve zhuštěnější formě. V předchozím dílu jsme začali
Rosenblattův perceptron
 Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
Perceptron Přenosové funkce Rosenblattův perceptron Rosenblatt r. 1958. Inspirace lidským okem Podle fyziologického vzoru je třívrstvá: Vstupní vrstva rozvětvovací jejím úkolem je mapování dvourozměrného
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C)
") VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
1 0 0 u 22 u 23 l 31. l u11
 LU dekompozice Jedná se o rozklad matice A na dvě trojúhelníkové matice L a U, A=LU. Matice L je dolní trojúhelníková s jedničkami na diagonále a matice U je horní trojúhelníková. a a2 a3 a 2 a 22 a 23
LU dekompozice Jedná se o rozklad matice A na dvě trojúhelníkové matice L a U, A=LU. Matice L je dolní trojúhelníková s jedničkami na diagonále a matice U je horní trojúhelníková. a a2 a3 a 2 a 22 a 23
Číselné charakteristiky a jejich výpočet
 Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz charakteristiky polohy charakteristiky variability charakteristiky koncetrace charakteristiky polohy charakteristiky
Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz charakteristiky polohy charakteristiky variability charakteristiky koncetrace charakteristiky polohy charakteristiky
Náhodné (statistické) chyby přímých měření
 chyby přímých měření") Náhodné (statistické) chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně
Náhodné (statistické) chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
AVDAT Nelineární regresní model
 AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
Jaroslav Tuma. 8. února 2010
 Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Filtrace obrazu ve frekvenční oblasti
 Filtrace obrazu ve frekvenční oblasti Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,
Filtrace obrazu ve frekvenční oblasti Václav Hlaváč České vysoké učení technické v Praze Český institut informatiky, robotiky a kybernetiky 166 36 Praha 6, Jugoslávských partyzánů 1580/3 http://people.ciirc.cvut.cz/hlavac,
Aproximace funkcí. Numerické metody 6. května FJFI ČVUT v Praze
 Aproximace funkcí Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Dělení Interpolace 1D Více dimenzí Minimalizace Důvody 1 Dělení Dělení - Získané data zadané data 2 Dělení - Získané data Obecně
Aproximace funkcí Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Dělení Interpolace 1D Více dimenzí Minimalizace Důvody 1 Dělení Dělení - Získané data zadané data 2 Dělení - Získané data Obecně
Změna koeficientů PDR při změně proměnných
 Změna koeficientů PR při změně proměnných Oldřich Vlach oto pojednání doplňuje přednášku M. Šofera na téma Nalezení složek tenzoru napjatosti pro případ rovinné úlohy s povrchem zatíženým kontaktním tlakem
Změna koeficientů PR při změně proměnných Oldřich Vlach oto pojednání doplňuje přednášku M. Šofera na téma Nalezení složek tenzoru napjatosti pro případ rovinné úlohy s povrchem zatíženým kontaktním tlakem
II. Úlohy na vložené cykly a podprogramy
 II. Úlohy na vložené cykly a podprogramy Společné zadání pro příklady 1. - 10. začíná jednou ze dvou možností popisu vstupních dat. Je dána posloupnost (neboli řada) N reálných (resp. celočíselných) hodnot.
II. Úlohy na vložené cykly a podprogramy Společné zadání pro příklady 1. - 10. začíná jednou ze dvou možností popisu vstupních dat. Je dána posloupnost (neboli řada) N reálných (resp. celočíselných) hodnot.
Občas se používá značení f x (x 0, y 0 ), resp. f y (x 0, y 0 ). Parciální derivace f. rovnoběžného s osou y a z:
, resp. f y (x 0, y 0 ). Parciální derivace f. rovnoběžného s osou y a z:") PARCIÁLNÍ DERIVACE Jak derivovat reálné funkce více proměnných aby bylo možné tyto derivace použít podobně jako derivace funkcí jedné proměnné? Jestliže se okopíruje definice z jedné proměnné dostane se
PARCIÁLNÍ DERIVACE Jak derivovat reálné funkce více proměnných aby bylo možné tyto derivace použít podobně jako derivace funkcí jedné proměnné? Jestliže se okopíruje definice z jedné proměnné dostane se
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Posouzení přesnosti měření
 Přesnost měření Posouzení přesnosti měření Hodnotu kvantitativně popsaného parametru jakéhokoliv objektu zjistíme jedině měřením. Reálné měření má vždy omezenou přesnost V minulosti sloužila k posouzení
Přesnost měření Posouzení přesnosti měření Hodnotu kvantitativně popsaného parametru jakéhokoliv objektu zjistíme jedině měřením. Reálné měření má vždy omezenou přesnost V minulosti sloužila k posouzení
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Zákony hromadění chyb.
 Zákony hromadění chyb. Zákon hromadění skutečných chyb. Zákon hromadění středních chyb. Tomáš Bayer bayertom@natur.cuni.cz Přírodovědecká fakulta Univerzity Karlovy v Praze, Katedra aplikované geoinformatiky
Zákony hromadění chyb. Zákon hromadění skutečných chyb. Zákon hromadění středních chyb. Tomáš Bayer bayertom@natur.cuni.cz Přírodovědecká fakulta Univerzity Karlovy v Praze, Katedra aplikované geoinformatiky
REALIZACE HRANOVÉHO DETEKTORU S VYUŽITÍM VLNKOVÉ TRANSFORMACE
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV TELEKOMUNIKACÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF TELECOMMUNICATIONS
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů
 obrazů") ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
Normální (Gaussovo) rozdělení
 rozdělení") Normální (Gaussovo) rozdělení Normální (Gaussovo) rozdělení popisuje vlastnosti náhodné spojité veličiny, která vzniká složením různých náhodných vlivů, které jsou navzájem nezávislé, kterých je velký
Normální (Gaussovo) rozdělení Normální (Gaussovo) rozdělení popisuje vlastnosti náhodné spojité veličiny, která vzniká složením různých náhodných vlivů, které jsou navzájem nezávislé, kterých je velký
Pseudospektrální metody
 Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
Numerické metody a programování. Lekce 4
 Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
Náhodné chyby přímých měření
 Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
Náhodné chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně pravděpodobná.
PARCIÁLN LNÍ ROVNICE
 PARCIÁLN LNÍ DIFERENCIÁLN LNÍ ROVNICE VE ZPRACOVÁNÍ OBRAZU Autor práce: Vedoucí práce: Anna Kratochvílová Ing.Tomáš Oberhuber Zadání Najít vhodný matematický model pro segmentaci obrazových dat Navrhnout
PARCIÁLN LNÍ DIFERENCIÁLN LNÍ ROVNICE VE ZPRACOVÁNÍ OBRAZU Autor práce: Vedoucí práce: Anna Kratochvílová Ing.Tomáš Oberhuber Zadání Najít vhodný matematický model pro segmentaci obrazových dat Navrhnout
Zpracování obrazů. Honza Černocký, ÚPGM
 Zpracování obrazů Honza Černocký, ÚPGM 1D signál 2 Obrázky 2D šedotónový obrázek (grayscale) Několikrát 2D barevné foto 3D lékařské zobrazování, vektorová grafika, point-clouds (hloubková mapa, Kinect)
Zpracování obrazů Honza Černocký, ÚPGM 1D signál 2 Obrázky 2D šedotónový obrázek (grayscale) Několikrát 2D barevné foto 3D lékařské zobrazování, vektorová grafika, point-clouds (hloubková mapa, Kinect)
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách
 Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
Obraz matematický objekt. Spojitý obraz f c : (Ω c R 2 ) R
 R") Obraz matematický objekt Spojitý obraz f c : (Ω c R 2 ) R Obraz matematický objekt Spojitý obraz f c : (Ω c R 2 ) R Diskrétní obraz f d : (Ω {0... n 1 } {0... n 2 }) {0... f max } Obraz matematický objekt
Obraz matematický objekt Spojitý obraz f c : (Ω c R 2 ) R Obraz matematický objekt Spojitý obraz f c : (Ω c R 2 ) R Diskrétní obraz f d : (Ω {0... n 1 } {0... n 2 }) {0... f max } Obraz matematický objekt
Integrace. Numerické metody 7. května FJFI ČVUT v Praze
 Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY
 POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
Transformace obrazu Josef Pelikán KSVI MFF UK Praha
 Transformace obrazu 99725 Josef Pelikán KSVI MFF UK Praha email: Josef.Pelikan@mff.cuni.cz WWW: http://cgg.ms.mff.cuni.cz/~pepca/ Transformace 2D obrazu dekorelace dat potlačení závislosti jednotlivých
Transformace obrazu 99725 Josef Pelikán KSVI MFF UK Praha email: Josef.Pelikan@mff.cuni.cz WWW: http://cgg.ms.mff.cuni.cz/~pepca/ Transformace 2D obrazu dekorelace dat potlačení závislosti jednotlivých
STATISTICKÉ ODHADY Odhady populačních charakteristik
 STATISTICKÉ ODHADY Odhady populačních charakteristik Jak stanovit charakteristiky rozložení sledované veličiny v základní populaci? Populaci většinou nemáme celou k dispozici, musíme se spokojit jen s
STATISTICKÉ ODHADY Odhady populačních charakteristik Jak stanovit charakteristiky rozložení sledované veličiny v základní populaci? Populaci většinou nemáme celou k dispozici, musíme se spokojit jen s
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
FOURIEROVA ANAL YZA 2D TER ENN ICH DAT Karel Segeth
 FOURIEROVA ANALÝZA 2D TERÉNNÍCH DAT Karel Segeth Motto: The faster the computer, the more important the speed of algorithms. přírodní jev fyzikální model matematický model numerický model řešení numerického
FOURIEROVA ANALÝZA 2D TERÉNNÍCH DAT Karel Segeth Motto: The faster the computer, the more important the speed of algorithms. přírodní jev fyzikální model matematický model numerický model řešení numerického
Lineární regrese. Komentované řešení pomocí MS Excel
 Lineární regrese Komentované řešení pomocí MS Excel Vstupní data Tabulka se vstupními daty je umístěna v oblasti A1:B11 (viz. obrázek) na listu cela data Postup Základní výpočty - regrese Výpočet základních
Lineární regrese Komentované řešení pomocí MS Excel Vstupní data Tabulka se vstupními daty je umístěna v oblasti A1:B11 (viz. obrázek) na listu cela data Postup Základní výpočty - regrese Výpočet základních
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních technologií Vysoké učení technické v Brně 1. ÚVOD...
 5 OBSAH. ÚVOD... 7 2. ZÁKLADNÍ POJMY... 8 2. POČÍTAČOVÉ VIDĚNÍ... 8 2.2 REPREZENTACE OBRAZU... 9 2.3 ZPRACOVÁNÍ OBRAZU... 3. DIGITALIZACE OBRAZU... 3. VZORKOVÁNÍ... 3.2 KVANTOVÁNÍ... 2 4. FILTRACE A DETEKCE
5 OBSAH. ÚVOD... 7 2. ZÁKLADNÍ POJMY... 8 2. POČÍTAČOVÉ VIDĚNÍ... 8 2.2 REPREZENTACE OBRAZU... 9 2.3 ZPRACOVÁNÍ OBRAZU... 3. DIGITALIZACE OBRAZU... 3. VZORKOVÁNÍ... 3.2 KVANTOVÁNÍ... 2 4. FILTRACE A DETEKCE
TERMINOLOGIE ... NAMĚŘENÁ DATA. Radek Mareček PŘEDZPRACOVÁNÍ DAT. funkční skeny
 PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII
 PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
Zpracování digitalizovaného obrazu (ZDO) - Segmentace
 - Segmentace") Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
+ 2y. a y = 1 x 2. du x = nxn 1 f(u) 2x n 3 yf (u)
 2x n 3 yf (u)") Diferenciální počet příklad 1 Dokažte, že funkce F, = n f 2, kde f je spojitě diferencovatelná funkce, vhovuje vztahu + 2 = nf ; 0 Řešení: Označme u = 2. Pak je F, = n fu a platí Podle vět o derivaci složené
Diferenciální počet příklad 1 Dokažte, že funkce F, = n f 2, kde f je spojitě diferencovatelná funkce, vhovuje vztahu + 2 = nf ; 0 Řešení: Označme u = 2. Pak je F, = n fu a platí Podle vět o derivaci složené
CVIČNÝ TEST 15. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
(Cramerovo pravidlo, determinanty, inverzní matice)
") KMA/MAT1 Přednáška a cvičení, Lineární algebra 2 Řešení soustav lineárních rovnic se čtvercovou maticí soustavy (Cramerovo pravidlo, determinanty, inverzní matice) 16 a 21 října 2014 V dnešní přednášce
KMA/MAT1 Přednáška a cvičení, Lineární algebra 2 Řešení soustav lineárních rovnic se čtvercovou maticí soustavy (Cramerovo pravidlo, determinanty, inverzní matice) 16 a 21 října 2014 V dnešní přednášce
Jana Dannhoferová Ústav informatiky, PEF MZLU
 Počítačová grafika Křivky Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU Základní vlastnosti křivek křivka soustava parametrů nějaké rovnice, která je posléze generativně
Počítačová grafika Křivky Jana Dannhoferová (jana.dannhoferova@mendelu.cz) Ústav informatiky, PEF MZLU Základní vlastnosti křivek křivka soustava parametrů nějaké rovnice, která je posléze generativně
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE PLZEŇ, 202 Pavel Jedlička TÉMA ČESKY: Předzpracování medicínských obrazů pro následnou segmentaci NÁZEV ANGLICKY:
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE PLZEŇ, 202 Pavel Jedlička TÉMA ČESKY: Předzpracování medicínských obrazů pro následnou segmentaci NÁZEV ANGLICKY:
a počtem sloupců druhé matice. Spočítejme součin A.B. Označme matici A.B = M, pro její prvky platí:
 Řešené příklady z lineární algebry - část 1 Typové příklady s řešením Příklady jsou určeny především k zopakování látky před zkouškou, jsou proto řešeny se znalostmi učiva celého semestru. Tento fakt se
Řešené příklady z lineární algebry - část 1 Typové příklady s řešením Příklady jsou určeny především k zopakování látky před zkouškou, jsou proto řešeny se znalostmi učiva celého semestru. Tento fakt se