Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony
|
|
|
- Štefan Vladislav Vopička
- před 6 lety
- Počet zobrazení:
Transkript

1 Autor DP: Vedoucí práce: Bc. Tomáš Kozák Ing. Jan Zavřel, Ph.D.
2 Vypracovat přehled způsobů řízení paralelních kinematických struktur s nadbytečnými pohony Vytvořit model jednoduchého redundantního mechanismu a odsimulovat na něm vybrané způsoby řízení Vytvořit simulační model mechanismu Sliding Delta a aplikovat na něj vyzkoušené regulátory Oživit laboratorní model mechanismu Sliding Delta
3 Úvod Řízení redundantních kinematických struktur Matematický model mechanismu 2Delta Návrh regulátorů a simulace Matematický model mechanismu Sliding Delta Úprava regulátorů a simulace Oživení laboratorního modelu Sliding Delta Závěr

4 Tato diplomová práce navazuje na mou bakalářskou práci PKS obecně neredundantní vezrze Sliding Delta simulace řízení Hlavním cílem je tedy seznámení se s metodami řízení redundantních struktur a dokončení již započatého projektu
5 Decentralizované řízení Centralizované řízení Modelově orientované řízení inverzní dynamika klouzavé řízení kvadraticky optimální řízení (LQR) prediktivní řízení (MPC) momentové řízení (CTC)
6 Výhody robustní využití nadbytečného pohonu vyšší dynamika vyšší tuhost Zvolené přístupy řízení LQR, MPC a CTC
7 LQR optimální řízení (kritérium) stavová zpětná vazba MPC lokální optimalizace kritéria linearizace, diskretizace, stavový pozorovatel komplikované -> zjednodušená varianta CTC speciální případ zpětnovazební linearizace vnitřní smyčka inverzní dynamika vnější smyčka PID regulátor Pozn.: stavový pozorovatel
8 1 stupeň volnosti 2 pohony obecnější 2D varianta Sliding Delty LRST převedené do nezávislých souřadnic
9 Provedení linearizace modelu ve zvoleném bodě Analýza vlastností lineárního modelu stabilita, řiditelnost a pozorovatelnost Diskterizace lineárního systému pro MPC Návrh konstant regulátorů (experimentálně) Simulace stabilizace v rovnovážné poloze počáteční odchylka polohy platformy Simulace sledování referenční trajektorie sinusový průběh souřadnice platformy
10

11 Průběh odchylek polohy platformy při stabilizaci ve zvolené poloze

12 Průběh odchylek polohy platformy při sledování trajektorie
 LRST převedené do")
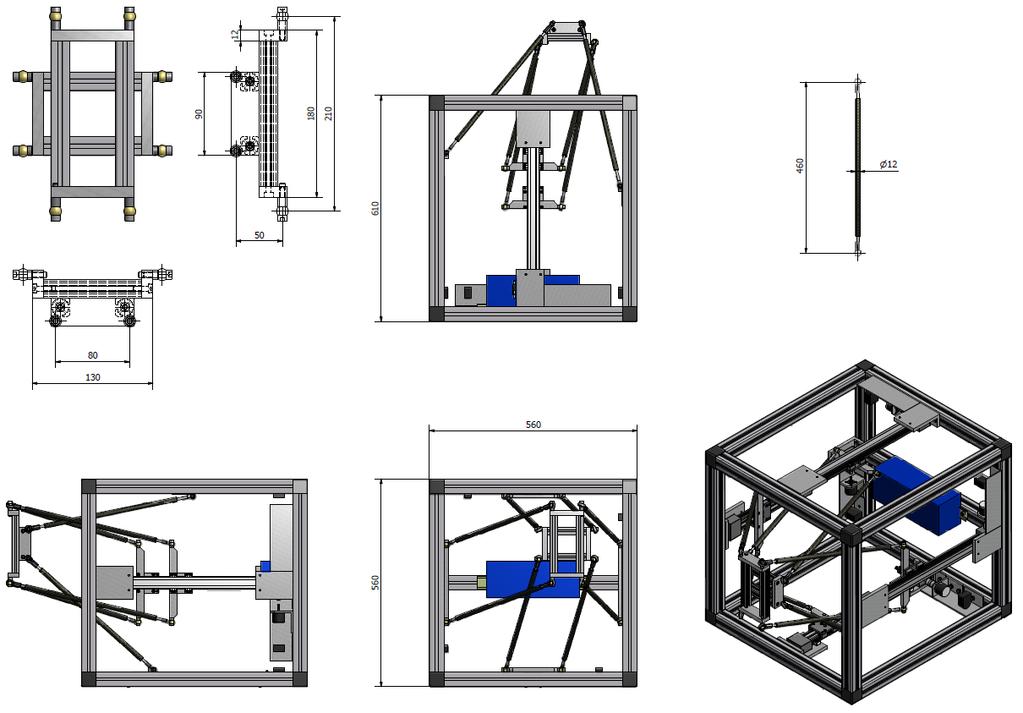
13 3 stupně volnosti 4 pohony kinematicky optimalizované rozměry (BP) LRST převedené do nezávislých souřadnic
14
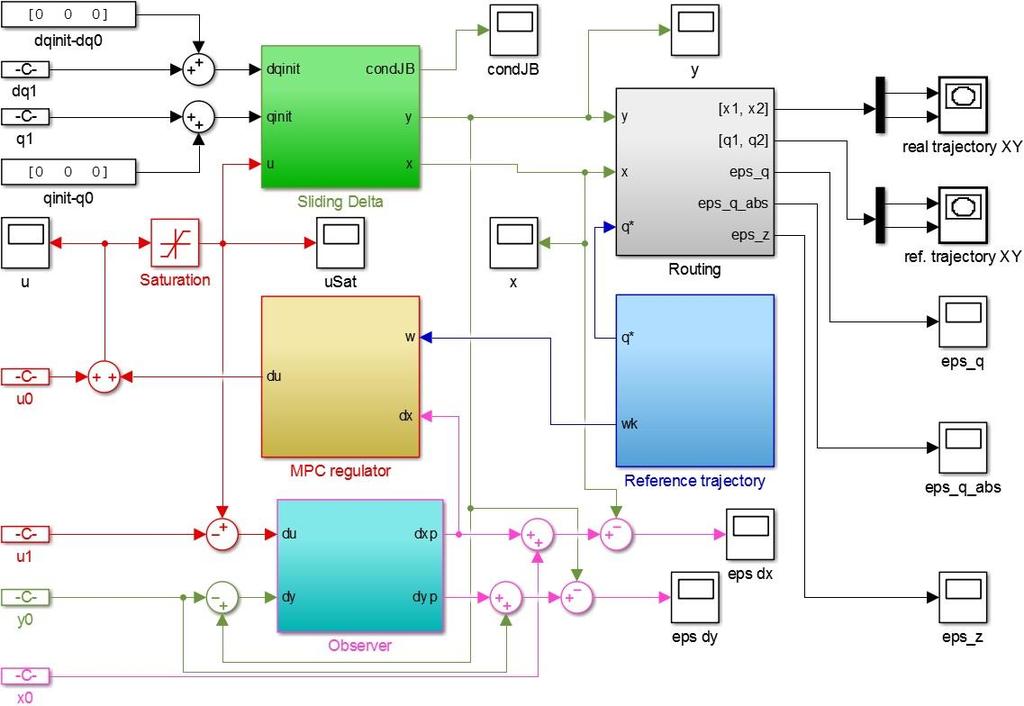
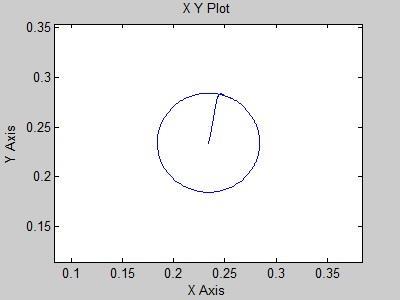
15 Model Sliding Delta převzat z bakalářské práce rozšířen o původně neuvažovaný vstup Stejný postup úpravy modelu jako v případě 2Delty Rozšíření regulátorů pro více vstupů a výstupů Správné skládání matic Návrh stavového pozorovatele Simulace a ladění regulátorů a pozorovatele pouze simulace sledování trajektorie kruhová trajektorie v rovině platformy
16
17

18 Průběh odchylek polohy platformy při sledování trajektorie

19
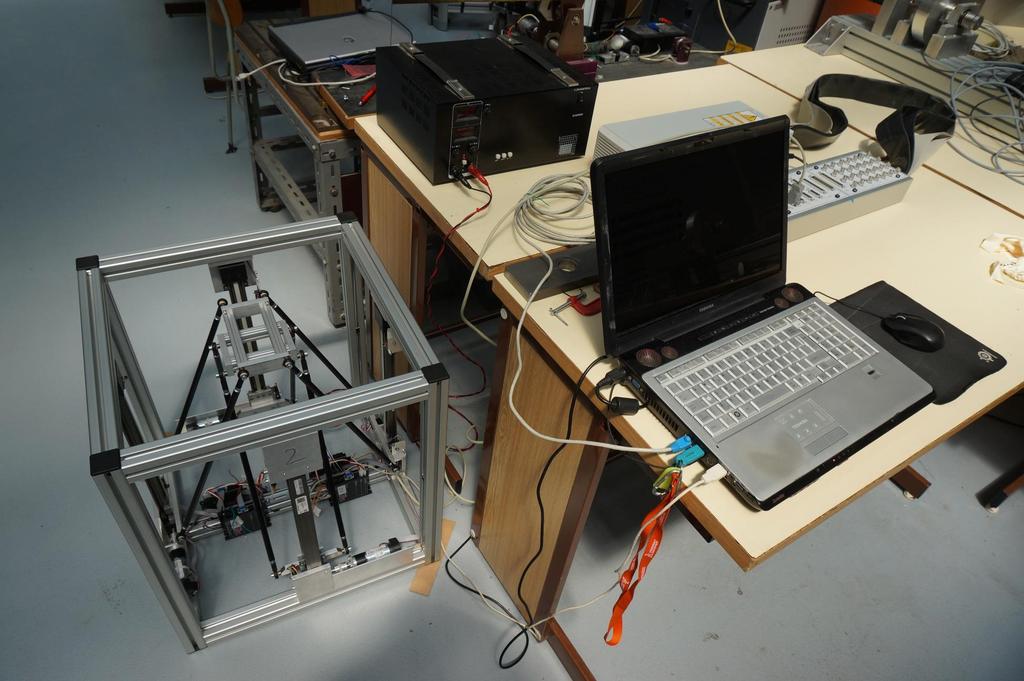
20 Simulace provedeny v prostředí Matlab změna orientace mechanismu navíc vytvořen jednoduchý model DC motoru Řízení DC motorů Maxon jednotky Epos proudové (momentové) řízení komunikace prostřednictvím sběrnice CAN Pro oživení zvolen real-time procesor dspace úprava modelu regulátoru MPC v Matlabu pro generování spustitelného kódu perioda regulátoru 4ms Ovládací rozhraní vytvořeno v Control Desku
21
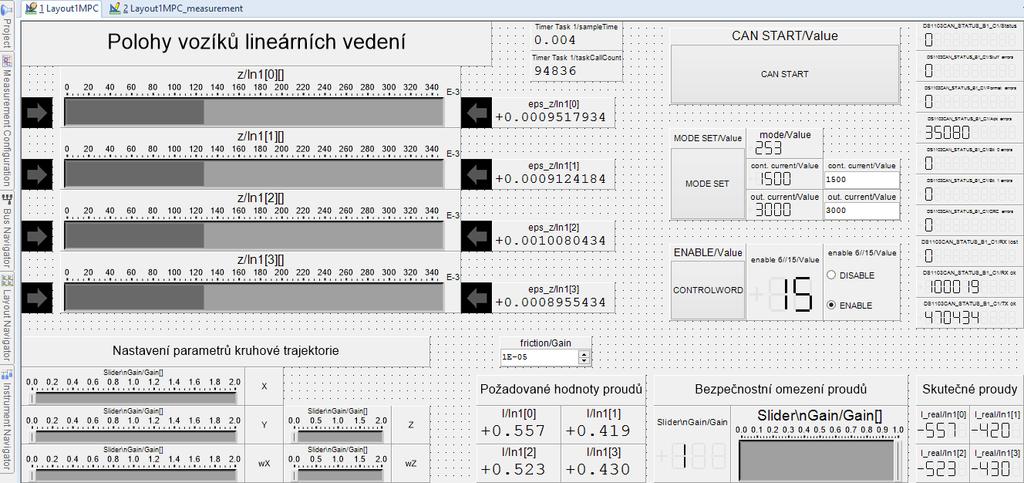
22
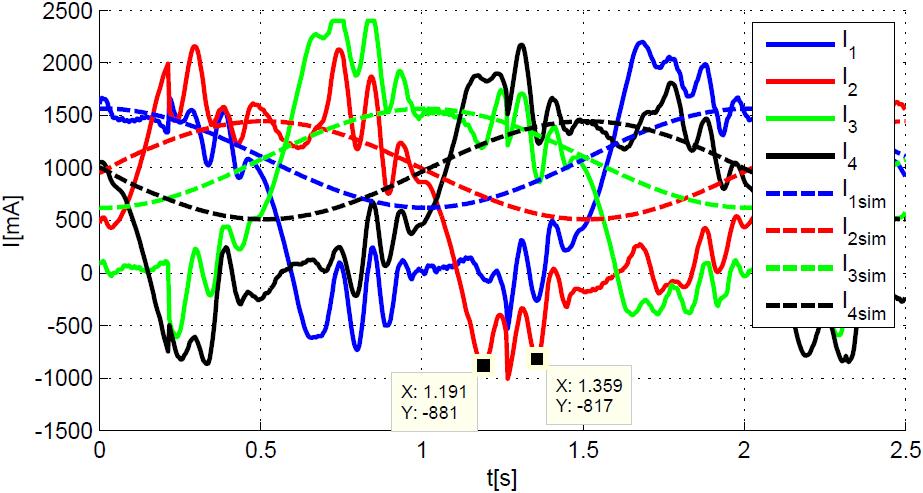
23 Experimenty ukázaly značné kmitání mechanismu zanedbání poddajností konstrukční nedostatky Nebylo možné pracovat s předepětím zanedbání pasivních odporů nedostatečný moment pohonů Po zatížení platformy došlo k přeladění systému přetěžování pohonů
24 Sledování trajektorie, v pravo po zatížení platformy

25


26
27 Postupně byly splněny všechny cíle BP vypracován přehled různých způsobů řízení vytvořen model 2Delta a provedena simulace řízení vytvořen model Sliding Delta a provedena simulace oživen laboratorní model Sliding Delta Další možný postup použití tužších pohonů (kuličkový šroub,...), nebo alespoň výměna převodovek zahrnutí poddajností do matematického modelu a provedení jejich identifikace provedení kalibrace mechanismu rozšíření MPC o linearizaci v každém kroku a o omezení akční veličiny
28

29
30 Parametry vychází z návrhu mechanismu v rámci bakalářského projektu, kalibrace provedena nebyla Kalibrace byla v plánu při dostatku času pro zlepšení přesnosti řízení, ale zhodnotili jsme, že v současném stavu nemá smysl S ohledem k závěrům práce by bylo vhodné provést identifikaci tuhostí při použití poddajného modelu

31 Otestování skokové odezvy systému s ohledem na experimenty s laboratorním modelem nebyla implementována inicializační sekvence pro najetí robota do určité polohy bylo nepravděpodobné, že se podaří robota umístit do konkrétní polohy nevyhnutelný skok na počátku pohybu

32
33
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Témata oborových projektů a bakalářských prací 2016/2017
 Témata oborových projektů a bakalářských prací 2016/2017 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Bakalářská a diplomová práce související tématem s projektem základního
Témata oborových projektů a bakalářských prací 2016/2017 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Bakalářská a diplomová práce související tématem s projektem základního
Témata oborových projektů a bakalářských prací 2015/2016 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky
 Témata oborových projektů a bakalářských prací 2015/2016 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Modely pohybu výkonného členu robotického ramene na základě měření
Témata oborových projektů a bakalářských prací 2015/2016 Ústav mechaniky, biomechaniky a mechatroniky, Odbor mechaniky a mechatroniky Modely pohybu výkonného členu robotického ramene na základě měření
Ivan Švarc. Radomil Matoušek. Miloš Šeda. Miluše Vítečková. c..~"f~ AKADEMICKÉ NAKlADATEL.STVf. Brno 20 I I
 Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Ivan Švarc. Radomil Matoušek Miloš Šeda. Miluše Vítečková AUTMATICKÉ RíZENí c..~"f~ AKADEMICKÉ NAKlADATEL.STVf Brno 0 I I n ~~ IU a ~ o ~e ~í ru ly ry I i ~h ~" BSAH. ÚVD. LGICKÉ RÍZENÍ. ""''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''oooo
Konstrukční zásady návrhu polohových servopohonů
 Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Konstrukční zásady návrhu polohových servopohonů Radomír Mendřický Elektrické pohony a servomechanismy 2.6.2015 Obsah prezentace Kinematika polohových servopohonů Zásady pro návrh polohových servopohonů
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
 MODELOVÁNÍ A ŘÍZENÍ INVERZNÍHO KYVADLA Michalík Michal Katedra elektromechaniky a výkonové elektroniky, Západočeská univerzita v Plzni Abstrakt Tento příspěvek se zabývá rovinnou úlohou simultánního balancování
MODELOVÁNÍ A ŘÍZENÍ INVERZNÍHO KYVADLA Michalík Michal Katedra elektromechaniky a výkonové elektroniky, Západočeská univerzita v Plzni Abstrakt Tento příspěvek se zabývá rovinnou úlohou simultánního balancování
POPIS, IDENTIFIKACE SYSTÉMU A NÁVRH REGULÁTORU POMOCÍ MATLABU V APLIKACI FOTBAL ROBOTŮ
 POPIS, IDENTIFIKACE SYSTÉMU A NÁVRH REGULÁTORU POMOCÍ MATLABU V APLIKACI FOTBAL ROBOTŮ Z.Macháček, V. Srovnal Katedra měřicí a řídicí techniky, Fakulta elektrotechniky a informatiky, VŠB-TU Ostrava Abstrakt
POPIS, IDENTIFIKACE SYSTÉMU A NÁVRH REGULÁTORU POMOCÍ MATLABU V APLIKACI FOTBAL ROBOTŮ Z.Macháček, V. Srovnal Katedra měřicí a řídicí techniky, Fakulta elektrotechniky a informatiky, VŠB-TU Ostrava Abstrakt
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu.
 43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu. Popis aktivity Návrh a realizace řídicích algoritmů pro lineární elektrický motor použitý jako poloaktivní aktuátor tlumení pérování
43A111 Návrh řízení podvozku vozidla pomocí lineárního elektrického pohonu. Popis aktivity Návrh a realizace řídicích algoritmů pro lineární elektrický motor použitý jako poloaktivní aktuátor tlumení pérování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu
 Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanické pohony. Doc. Ing. Antonín Havelka, CSc.
 Mechanické pohony Doc. Ing. Antonín Havelka, CSc. Porovnání vlastností signálů pro řízení (přenos informace) Porovnání vlastností signálů pro přenos výkonu KRITÉRIUM/ SIGNÁL Síla při přímočarém pohybu
Mechanické pohony Doc. Ing. Antonín Havelka, CSc. Porovnání vlastností signálů pro řízení (přenos informace) Porovnání vlastností signálů pro přenos výkonu KRITÉRIUM/ SIGNÁL Síla při přímočarém pohybu
Ladění regulátorů v pokročilých strategiích řízení
 KONTAKT 2010 Ladění regulátorů v pokročilých strategiích řízení Autor: Petr Procházka (prochp16@fel.cvut.cz) Vedoucí: Vladimír Havlena (Vladimir.Havlena@Honeywell.com) Katedra řídicí techniky FEL ČVUT
KONTAKT 2010 Ladění regulátorů v pokročilých strategiích řízení Autor: Petr Procházka (prochp16@fel.cvut.cz) Vedoucí: Vladimír Havlena (Vladimir.Havlena@Honeywell.com) Katedra řídicí techniky FEL ČVUT
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE
 VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
VÝVOJ ŘÍDICÍCH ALGORITMŮ HYDRAULICKÝCH POHONŮ S VYUŽITÍM SIGNÁLOVÉHO PROCESORU DSPACE Přednáška na semináři CAHP v Praze 4.9.2013 Prof. Ing. Petr Noskievič, CSc. Ing. Miroslav Mahdal, Ph.D. Katedra automatizační
DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND
 DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND Autor práce: Ing. Lukáš Kanta Obsah prezentace 1. Seznámení s aerodynamickým kalibračním
DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND Autor práce: Ing. Lukáš Kanta Obsah prezentace 1. Seznámení s aerodynamickým kalibračním
Laborato regula ních systém a prost edk Název prezentace ídicích systém Umíst ní laborato E228 Správce laborato Ing. Št pán O ana, Ph.D.
 Laboratoř regulačních systémů a prostředků Náev preentace řídicích systémů Umístění laboratoře: E228 Správce laboratoře: Ing. Štěpán Ožana, Ph.D. Zaměření laboratoře Návrh a realiace měřicích a řídicích
Laboratoř regulačních systémů a prostředků Náev preentace řídicích systémů Umístění laboratoře: E228 Správce laboratoře: Ing. Štěpán Ožana, Ph.D. Zaměření laboratoře Návrh a realiace měřicích a řídicích
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Návrh a simulace zkušební stolice olejového čerpadla. Martin Krajíček
 Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
Návrh a simulace zkušební stolice olejového čerpadla Autor: Vedoucí diplomové práce: Martin Krajíček Prof. Michael Valášek 1 Cíle práce 1. Vytvoření specifikace zařízení 2. Návrh zařízení včetně hydraulického
České vysoké učení technické v Praze Fakulta strojní. Vojtěch Rada. Lanový HexaSphere
 České vysoké učení technické v Praze Fakulta strojní Lanový HexeSphere 2014 Obsah prezentace 1 Popis mechanismu 2 Konstrukční úpravy 3 Matematický model Kinematický model Dynamický model Simulace 4 Protivůlové
České vysoké učení technické v Praze Fakulta strojní Lanový HexeSphere 2014 Obsah prezentace 1 Popis mechanismu 2 Konstrukční úpravy 3 Matematický model Kinematický model Dynamický model Simulace 4 Protivůlové
Směrové řízení vozidla. Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D.
 Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Ing. Pavel Brabec, Ph.D. Ing. Robert Voženílek, Ph.D. Možnosti směrového řízení u vozidel - zatáčející kola přední nápravy (klasická koncepce u rychle jedoucích vozidel) Možnosti směrového řízení u vozidel
Řízení tepelné soustavy pomocí PLC Siemens
 Řízení tepelné soustavy pomocí PLC Siemens Martin Kopal TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Řízení tepelné soustavy pomocí PLC Siemens Martin Kopal TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci.
 Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Dynamické chyby interpolace. Chyby při lineární a kruhové interpolaci. 10.12.2014 Obsah prezentace Chyby interpolace Chyby při lineární interpolaci Vlivem nestejných polohových zesílení interpolujících
Obrábění robotem se zpětnovazební tuhostí
 Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
Obrábění robotem se zpětnovazební tuhostí Odbor mechaniky a mechatroniky ČVUT v Praze, Fakulta strojní Student: Yaron Sela Vedoucí: Prof. Ing. Michael Valášek, DrSc Úvod Motivace Obráběcí stroj a důležitost
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Laboratoř řídicích systémů EB306
 Katedra kybernetiky a biomedicínského inženýrství Laboratoř řídicích systémů EB306 Správce: doc. Ing. Štěpán Ožana, Ph.D. Katedra kybernetiky a biomedicínského inženýrství Katedra kybernetiky a biomedicínského
Katedra kybernetiky a biomedicínského inženýrství Laboratoř řídicích systémů EB306 Správce: doc. Ing. Štěpán Ožana, Ph.D. Katedra kybernetiky a biomedicínského inženýrství Katedra kybernetiky a biomedicínského
Vývojové práce v elektrických pohonech
 Vývojové práce v elektrických pohonech Pavel Komárek ČVUT Praha, Fakulta elektrotechnická, K 31 Katedra elektrických pohonů a trakce Technická, 166 7 Praha 6-Dejvice Konference MATLAB 001 Abstrakt Při
Vývojové práce v elektrických pohonech Pavel Komárek ČVUT Praha, Fakulta elektrotechnická, K 31 Katedra elektrických pohonů a trakce Technická, 166 7 Praha 6-Dejvice Konference MATLAB 001 Abstrakt Při
ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU. Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D.
 ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D. Obsah Úvod Úprava konstrukce stávajícího modelu Matematický popis modelu Odstranění problému kývání po ukončení pohybu
ŘÍZENÍ MODELU NEKÝVAVÉHO JEŘÁBU Autor.: Lukáš Řápek Vedoucí.: Ing. Jan Zavřel, Ph.D. Obsah Úvod Úprava konstrukce stávajícího modelu Matematický popis modelu Odstranění problému kývání po ukončení pohybu
Modelování elektromechanického systému
 Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Síla od akčního členu Modelování elektromechanického systému Jaroslav Jirkovský 1 O společnosti HUMUSOFT Název firmy: Humusoft s.r.o. Založena: 1990 Počet zaměstnanců: 15 Sídlo: Praha 8, Pobřežní 20 MATLAB,
Matematicko-fyzikální model vozidla
 12. listopadu 2012 Obsah 1 2 3 Reprezentace trasy Řízení vozidla Motivace Motivace Simulátor se snaží přibĺıžit charakteristikám vozu Škoda Octavia Combi 2.0TDI Podpůrný nástroj pro vývoj regulátoru EcoDrive
12. listopadu 2012 Obsah 1 2 3 Reprezentace trasy Řízení vozidla Motivace Motivace Simulátor se snaží přibĺıžit charakteristikám vozu Škoda Octavia Combi 2.0TDI Podpůrný nástroj pro vývoj regulátoru EcoDrive
Ṡystémy a řízení. Helikoptéra Petr Česák
 Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
5.1.1 Nestacionární režim motoru
 5. 1 Simulace a experimenty pro návrh a optimalizaci řízení motoru 5.1.1 Nestacionární režim motoru Podíl na řešení: 12 241.1 Miloš Polášek, Jan Macek, Oldřich Vítek, Michal Takáts, Jiří Vávra, Vít Doleček
5. 1 Simulace a experimenty pro návrh a optimalizaci řízení motoru 5.1.1 Nestacionární režim motoru Podíl na řešení: 12 241.1 Miloš Polášek, Jan Macek, Oldřich Vítek, Michal Takáts, Jiří Vávra, Vít Doleček
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky v Brně
 Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
Vysoké učení technické v Brně Fakulta elektrotechniky a komunikačních technologíı Ústav automatizace a měřicí techniky Algoritmy řízení topného článku tepelného hmotnostního průtokoměru Autor práce: Vedoucí
Západočeská univerzita. Lineární systémy 2
 Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace.
 Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace. 10.12.2014 Obsah prezentace Chyby při přechodu kvadrantů vlivem pasivních odporů Kompenzace kvadrantových chyb
Dynamické chyby interpolace. Chyby způsobené pasivními odpory. Princip jejich kompenzace. 10.12.2014 Obsah prezentace Chyby při přechodu kvadrantů vlivem pasivních odporů Kompenzace kvadrantových chyb
Moderní nástroje pro vývoj elektronických řídicích jednotek
 Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
Moderní nástroje pro vývoj elektronických řídicích jednotek Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2008 Automobilová elektronika Brno, 17. - 18. 6. 2008 Jiří Sehnal, Humusoft spol. s
ZÁKLADY ROBOTIKY Pohony a věci s tím související
 ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
ZÁKLADY ROBOTIKY Pohony a věci s tím související Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
EXPERIMENTÁLNÍ STAND ŘÍZENÝ REAL TIME TOOLBOXEM NA TESTOVÁNÍ MEMBRÁN
 EXPERIMENTÁLNÍ STAND ŘÍZENÝ REAL TIME TOOLBOXEM NA TESTOVÁNÍ MEMBRÁN V. Andrlík, M. Jalová, M. Jalový ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a mechanismů 1. Úvod V dnešní době se do popředí
EXPERIMENTÁLNÍ STAND ŘÍZENÝ REAL TIME TOOLBOXEM NA TESTOVÁNÍ MEMBRÁN V. Andrlík, M. Jalová, M. Jalový ČVUT v Praze, Fakulta strojní, Ústav výrobních strojů a mechanismů 1. Úvod V dnešní době se do popředí
Profilová část maturitní zkoušky 2015/2016
 Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
Střední průmyslová škola, Přerov, Havlíčkova 2 751 52 Přerov Profilová část maturitní zkoušky 2015/2016 TEMATICKÉ OKRUHY A HODNOTÍCÍ KRITÉRIA Studijní obor: 26-41-M/01 Elektrotechnika Zaměření: počítačové
1. Regulace proudu kotvy DC motoru
 1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
1. Regulace proudu kotvy DC motoru Regulace proudu kotvy u stejnosměrných pohonů se užívá ze dvou zásadních důvodů: 1) zajištění časově optimálního průběhu přechodných dějů v regulaci otáček 2) možnost
15 - Stavové metody. Michael Šebek Automatické řízení
 15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
15 - Stavové metody Michael Šebek Automatické řízení 2016 10-4-16 Stavová zpětná vazba Když můžeme měřit celý stav (všechny složky stavového vektoru) soustavy, pak je můžeme využít k řízení u = K + r [
Popis obsahu balíčku WP20: Prediktivní nebo adaptivní řízení motoru za účelem snížení spotřeby paliva a škodlivých emisí
 Popis obsahu balíčku WP20: Prediktivní nebo adaptivní řízení motoru za účelem snížení spotřeby paliva a škodlivých emisí Vedoucí konsorcia podílející se na pracovním balíčku Ricardo Prague s.r.o., zodpovědná
Popis obsahu balíčku WP20: Prediktivní nebo adaptivní řízení motoru za účelem snížení spotřeby paliva a škodlivých emisí Vedoucí konsorcia podílející se na pracovním balíčku Ricardo Prague s.r.o., zodpovědná
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL
 Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
Projekt: CENTRUM VZDĚLÁVÁNÍ PEDAGOGŮ ODBORNÝCH ŠKOL Kurz: Stavba a provoz strojů v praxi 1 OBSAH 1. Úvod Co je CNC obráběcí stroj. 3 2. Vlivy na vývoj CNC obráběcích strojů. 3 3. Směry vývoje CNC obráběcích
Vývoj a testování elektronických řídicích jednotek pro automobily
 Vývoj a testování elektronických řídicích jednotek pro automobily Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2011 Automobilová elektronika Praha, 7. 6. 2011 Jiří Sehnal, Humusoft spol. s
Vývoj a testování elektronických řídicích jednotek pro automobily Jiří Sehnal Humusoft spol. s r.o. sehnal@humusoft.com EVV 2011 Automobilová elektronika Praha, 7. 6. 2011 Jiří Sehnal, Humusoft spol. s
Matematicko-fyzikální model vozidla
 20. února 2012 Obsah 1 2 Reprezentace trasy Řízení vozidla Motivace Motivace Simulátor se snaží přibĺıžit charakteristikám vozu Škoda Octavia Combi 2.0TDI Ověření funkce regulátoru EcoDrive Fyzikální základ
20. února 2012 Obsah 1 2 Reprezentace trasy Řízení vozidla Motivace Motivace Simulátor se snaží přibĺıžit charakteristikám vozu Škoda Octavia Combi 2.0TDI Ověření funkce regulátoru EcoDrive Fyzikální základ
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní.
 Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
Odměřovací systémy. Odměřování přímé a nepřímé, přírůstkové a absolutní. Radomír Mendřický Elektrické pohony a servomechanismy 7. 3. 2014 Obsah prezentace Úvod Odměřovací systémy Přímé a nepřímé odměřování
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Zapojení motoru
 Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Příloha A návod pro cvičení 1. SESTAVENÍ MODELU V PROSTŘEDÍ MATLAB SIMULINK Sestavte model real-time řízení v prostředí Matlab Simulink. 1.1. Zapojení motoru Začněte rozběhem motoru. Jeho otáčky se řídí
Stud. skupina: 3E/96 Číslo úlohy: - FSI, ÚMTMB - ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY REAL TIME CONTROL
 Předmět: RDO ŘÍZENÉ DYNAMICKÉ SOUSTAVY Jméno: Ročník: 3 Datum: 5. 5. 2013 Stud. skupina: 3E/96 Číslo úlohy: - Ústav: FSI, ÚMTMB - ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Název úlohy: REAL TIME
Předmět: RDO ŘÍZENÉ DYNAMICKÉ SOUSTAVY Jméno: Ročník: 3 Datum: 5. 5. 2013 Stud. skupina: 3E/96 Číslo úlohy: - Ústav: FSI, ÚMTMB - ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Název úlohy: REAL TIME
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
TGZ. 2-osé digitální servozesilovače
 TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
TGZ 2-osé digitální servozesilovače Digitální servozesilovače TGZ TGZ představuje nový koncept měničů pro více-osé aplikace. TGZ v sobě zahrnuje moderní prvky digitálního řízení, jednoduché přednastavené
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Klíčová slova: Paralelní robotické struktury, průmyslová robotika, prediktivní řízení, řízení v reálném času
 Automatizace ročník 52 číslo 5 strany 296-300 Draft version Paralelní robotické struktury a moderní metody jejich řízení Autor: Belda Květoslav (Ústav teorie informace a automatizace AV ČR, v.v.i., Praha)
Automatizace ročník 52 číslo 5 strany 296-300 Draft version Paralelní robotické struktury a moderní metody jejich řízení Autor: Belda Květoslav (Ústav teorie informace a automatizace AV ČR, v.v.i., Praha)
Reference 10. Předpokládejme stavový popis spojitého, respektive diskrétního systému
 Módy systému Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 8 Reference Úvod Řešení stavových rovnic Předpokládejme stavový popis spojitého, respektive diskrétního systému ẋ(t)=ax(t)+bu(t)
Módy systému Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 8 Reference Úvod Řešení stavových rovnic Předpokládejme stavový popis spojitého, respektive diskrétního systému ẋ(t)=ax(t)+bu(t)
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů.
 Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Dimenzování pohonů. Parametry a vztahy používané při návrhu servopohonů. M. Lachman, R. Mendřický - Elektrické pohony a servomechanismy 13.4.2015 Požadavky na pohon Dostatečný moment v celém rozsahu rychlostí
Vnitřní soutěž Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS )
") Vnitřní soutěž 2015 Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS-15-011) Příloha k závěrečné zprávě Autor: Martin Švejda, msvejda@kky.zcu.cz, (korespondenční autor) Arnold Jáger,
Vnitřní soutěž 2015 Výukový model pro robotiku - rozšíření, moderní algoritmy v robotice (VS-15-011) Příloha k závěrečné zprávě Autor: Martin Švejda, msvejda@kky.zcu.cz, (korespondenční autor) Arnold Jáger,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky DIPLOMOVÁ PRÁCE MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ Autor: Jiří Plecháček Vedoucí diplomové
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní, Ústav mechaniky, biomechaniky a mechatroniky DIPLOMOVÁ PRÁCE MODELOVÁNÍ A ŘÍZENÍ PODDAJNÝCH MECHANISMŮ ROBOTŮ Autor: Jiří Plecháček Vedoucí diplomové
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Zaměření Pohony a výkonová elektronika. verze 9. 10. 2014
 Otázky a okruhy problematiky pro přípravu na státní závěrečnou zkoušku z oboru PE v navazujícím magisterském programu strukturovaného studia na FEL ZČU v ak. r. 2015/16 Soubor obsahuje tematické okruhy
Otázky a okruhy problematiky pro přípravu na státní závěrečnou zkoušku z oboru PE v navazujícím magisterském programu strukturovaného studia na FEL ZČU v ak. r. 2015/16 Soubor obsahuje tematické okruhy
pneumatiky a kola zavěšení kol odpružení řízení
 Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Simulační model a identifikace voice coil servopohonu
 Simulační model a identifikace voice coil servopohonu Tomáš Hladovec Prezentace diplomové práce 2.9.2014 1 / 48 Obsah Úvod Seznámení s voice coil motorem 1 Úvod Seznámení s voice coil motorem Magnetické
Simulační model a identifikace voice coil servopohonu Tomáš Hladovec Prezentace diplomové práce 2.9.2014 1 / 48 Obsah Úvod Seznámení s voice coil motorem 1 Úvod Seznámení s voice coil motorem Magnetické
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP
 SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
SEZNÁMENÍ S PROJEKTEM AMA AUTONOMOUS MAPPING AIRSHIP Bronislav Koska*, Tomáš Křemen*, Vladimír Jirka** *Katedra speciální geodézie, Fakulta stavební ČVUT v Praze **ENKI, o.p.s. Obsah Porovnání metod sběru
DYNAMICKÁ ANALÝZA A OPTIMALIZACE
 Závěrečná výzkumná zpráva z řešení projektu FRVŠ 2282/2003/G1 DYNAMICKÁ ANALÝZA A OPTIMALIZACE PŘEVODOVÝCH ÚSTROJÍ Michal HAJŽMAN Miroslav BYRTUS Vladimír ZEMAN Katedra mechaniky, Univerzitní 22, 30614,
Závěrečná výzkumná zpráva z řešení projektu FRVŠ 2282/2003/G1 DYNAMICKÁ ANALÝZA A OPTIMALIZACE PŘEVODOVÝCH ÚSTROJÍ Michal HAJŽMAN Miroslav BYRTUS Vladimír ZEMAN Katedra mechaniky, Univerzitní 22, 30614,
Regulační pohony. Radomír MENDŘICKÝ. Regulační pohony
 Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Radomír MENDŘICKÝ 1 Pohony posuvů obráběcích strojů (rozdělení elektrických pohonů) Elektrické pohony Lineární el. pohon Rotační el. pohon Asynchronní lineární Synchronní lineární Stejnosměrný Asynchronní
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
POUŽITÍ REAL TIME TOOLBOXU PRO REGULACI HLADIN V PROPOJENÝCH VÁLCOVÝCH ZÁSOBNÍCÍCH
 POUŽITÍ REAL TIME TOOLBOXU PRO REGULACI HLADIN V PROPOJENÝCH VÁLCOVÝCH ZÁSOBNÍCÍCH P. Chalupa Univerzita Tomáše Bati ve Zlíně Fakulta technologická Ústav řízení procesů Abstrakt Příspěvek se zabývá problémem
POUŽITÍ REAL TIME TOOLBOXU PRO REGULACI HLADIN V PROPOJENÝCH VÁLCOVÝCH ZÁSOBNÍCÍCH P. Chalupa Univerzita Tomáše Bati ve Zlíně Fakulta technologická Ústav řízení procesů Abstrakt Příspěvek se zabývá problémem
Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu
 1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ
 KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ Radim Pišan, František Gazdoš Fakulta aplikované informatiky, Univerzita Tomáše Bati ve Zlíně Nad stráněmi 45, 760 05 Zlín Abstrakt V článku je představena knihovna
KNIHOVNA MODELŮ TECHNOLOGICKÝCH PROCESŮ Radim Pišan, František Gazdoš Fakulta aplikované informatiky, Univerzita Tomáše Bati ve Zlíně Nad stráněmi 45, 760 05 Zlín Abstrakt V článku je představena knihovna
SYNERGICKÝ EFEKT VE VÝUCE AUTOMATIZACE S VYUŽITÍM APLIKAČNÍCH KNIHOVEN MATLABU A SIMULINKU
 SYNERGICKÝ EFEKT VE VÝUCE AUTOMATIZACE S VYUŽITÍM APLIKAČNÍCH KNIHOVEN MATLABU A SIMULINKU Š.Ožana,M.Pieš Vysoká škola báňská-technická univerzita Ostrava Abstract Tento příspěvek má rešeršní charakter
SYNERGICKÝ EFEKT VE VÝUCE AUTOMATIZACE S VYUŽITÍM APLIKAČNÍCH KNIHOVEN MATLABU A SIMULINKU Š.Ožana,M.Pieš Vysoká škola báňská-technická univerzita Ostrava Abstract Tento příspěvek má rešeršní charakter
Centrum kompetence automobilového průmyslu Josefa Božka - AutoSympo a Kolokvium Božek 2. a , Roztoky -
 Popis obsahu balíčku Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a WP15: Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a Vedoucí konsorcia podílející se
Popis obsahu balíčku Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a WP15: Popis obsahu balíčku WP15 Snížení problémů hluku a vibrací (tzv. NVH) a Vedoucí konsorcia podílející se
3. Mechanická převodná ústrojí
 1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.4 Výzkum metod posuzování deformací částí automobilových převodů 3.4.2 Experimentální stanovení tuhosti hřídelů a skříní a jejich
1M6840770002 Str. 1 Vysoká škola báňská Technická univerzita Ostrava 3.4 Výzkum metod posuzování deformací částí automobilových převodů 3.4.2 Experimentální stanovení tuhosti hřídelů a skříní a jejich
Servozesilovače. Digitální servozesilovače TGA, TGP
 Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
Servozesilovače Digitální servozesilovače TGA, TGP Digitální servozesilovače TGA 300 Digitální servozesilovače TGA 300 jsou určené pro řízení synchronních rotačních a lineárních servomotorů. Servozesilovače
PREDIKTIVNÍ ŘÍZENÍ NELINEÁRNÍHO SYSTÉMU
 PREDIKIVNÍ ŘÍZENÍ NELINEÁRNÍHO SYSÉMU P. Chalupa Univerzita omáše Bati ve Zlíně Fakulta aplikované informatiky Ústav řízení procesů Nad Stráněmi 45, 76 5 Zlín Abstrakt Příspěvek zkoumá možnosti použití
PREDIKIVNÍ ŘÍZENÍ NELINEÁRNÍHO SYSÉMU P. Chalupa Univerzita omáše Bati ve Zlíně Fakulta aplikované informatiky Ústav řízení procesů Nad Stráněmi 45, 76 5 Zlín Abstrakt Příspěvek zkoumá možnosti použití
Digital Control of Electric Drives. Vektorové řízení asynchronních motorů. České vysoké učení technické Fakulta elektrotechnická
 Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Laboratorní model obráběcího stroje TRIJOINT
 Laboratorní model obráběcího stroje TRIJOINT Bc. Lukáš Řápek Vedoucí práce: Ing. Jan Zavřel, Ph.D. Abstrakt Podle skutečného obráběcího centra TRIJOINT 900H byl zkonstruován laboratorní model, který je
Laboratorní model obráběcího stroje TRIJOINT Bc. Lukáš Řápek Vedoucí práce: Ing. Jan Zavřel, Ph.D. Abstrakt Podle skutečného obráběcího centra TRIJOINT 900H byl zkonstruován laboratorní model, který je
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot
 Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
The Optimization of Modules for M68HC08 Optimalizace modulů pro M68HC08
 XXX. ASR '005 Seminar, Instruments and Control, Ostrava, April 9, 005 6 he Optimization of Modules for M68HC08 Optimalizace modulů pro M68HC08 DOLEŽEL, Petr & VAŠEK, Vladimír Ing., Univerzita omáše Bati
XXX. ASR '005 Seminar, Instruments and Control, Ostrava, April 9, 005 6 he Optimization of Modules for M68HC08 Optimalizace modulů pro M68HC08 DOLEŽEL, Petr & VAŠEK, Vladimír Ing., Univerzita omáše Bati
Využití neuronové sítě pro identifikaci realného systému
 1 Portál pre odborné publikovanie ISSN 1338-0087 Využití neuronové sítě pro identifikaci realného systému Pišan Radim Elektrotechnika 20.06.2011 Identifikace systémů je proces, kdy z naměřených dat můžeme
1 Portál pre odborné publikovanie ISSN 1338-0087 Využití neuronové sítě pro identifikaci realného systému Pišan Radim Elektrotechnika 20.06.2011 Identifikace systémů je proces, kdy z naměřených dat můžeme
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Rozdělení sub-oborů robotiky Učební text jméno a příjmení autora Doc. Ing. Mgr. Václav Záda, CSc. Liberec 2010 Materiál
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 2 DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. DYNAMIKA vyšetřuje pohyb hmotných útvarů vyvolaný silami Pohyb = proces změny fyzikálních veličin
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 2 DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. DYNAMIKA vyšetřuje pohyb hmotných útvarů vyvolaný silami Pohyb = proces změny fyzikálních veličin
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU
 SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
SEMI-AKTIVNĚ ŘÍZENÉ TLUMENÍ PODVOZKU VYSOKORYCHLOSTNÍHO VLAKU Filip Jeniš, Ing. ÚSTAV KONSTRUOVÁNÍ Fakulta strojního inženýrství VUT v Brně 25. 2. 2019 CÍL PRÁCE návrh a ověření algoritmu pro semi-aktivní
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Pro tvorbu samostatně spustitelných aplikací je k dispozici Matlab library.
 1.1 Matlab Matlab je interaktivní systém pro vědecké a technické výpočty založený na maticovém kalkulu. Umožňuje řešit velkou oblast numerických problémů, aniž byste museli programovat vlastní program.
1.1 Matlab Matlab je interaktivní systém pro vědecké a technické výpočty založený na maticovém kalkulu. Umožňuje řešit velkou oblast numerických problémů, aniž byste museli programovat vlastní program.
Obsah DÍL 1. Předmluva 11
 DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
DÍL 1 Předmluva 11 KAPITOLA 1 1 Minulost a současnost automatizace 13 1.1 Vybrané základní pojmy 14 1.2 Účel a důvody automatizace 21 1.3 Automatizace a kybernetika 23 Kontrolní otázky 25 Literatura 26
Ing. Martin Šindelář. Téma disertační práce: SLEDOVÁNÍ TECHNICKÉHO STAVU ZÁVĚSU KOLA VOZIDLA. Školitel: Doc. Ing. Ivan Mazůrek CSc.
 Ing. Martin Šindelář Téma disertační práce: SLEDOVÁNÍ TECHNICKÉHO STAVU ZÁVĚSU KOLA VOZIDLA Školitel: Doc. Ing. Ivan Mazůrek CSc. Téma disertační práce SLEDOVÁNÍ TECHNICKÉHO STAVU ZÁVĚSU KOLA VOZIDLA Funkce
Ing. Martin Šindelář Téma disertační práce: SLEDOVÁNÍ TECHNICKÉHO STAVU ZÁVĚSU KOLA VOZIDLA Školitel: Doc. Ing. Ivan Mazůrek CSc. Téma disertační práce SLEDOVÁNÍ TECHNICKÉHO STAVU ZÁVĚSU KOLA VOZIDLA Funkce
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme