Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
|
|
|
- Aleš Bednář
- před 6 lety
- Počet zobrazení:
Transkript
1 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
2 Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte se s metodami řešení kinematiky a dynamiky mechanismů 3. Sestavte matematický model pro jeden typ mechanismu 4. Programy KRESIC a DRESIC vyřešte pohyb mechanismu a navrhněte parametry pohonu
3 Přehled mechanismů vztlakových klapek





4
5 Vybraný mechanismus Fowlerova klapka Patent US B2 a EP B1

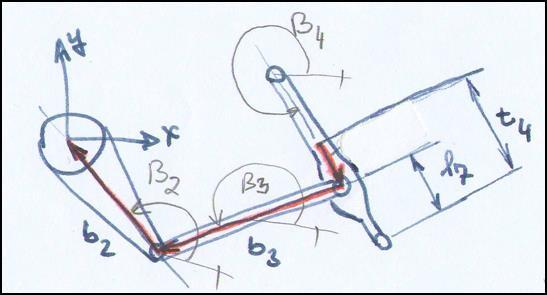
6 Kinematický model Fowlerovy klapky Kinematické schéma Počet stupňů volnosti n = 3 u 1 w j j 3 j=1 n = = 1 Počet nezávislých smyček l = d + m u + 1 Přidružený graf l = = 2
7 Vektorová metoda pro řešení kinematiky Uzavřené vektorové mnohoúhelníky Zvolené vektory pro dané smyčky b 1, b 2, b 3, b 4, b 5, b 6, b 7 a b 8 Zvolená nezávislá souřadnice β 2 Zvolené závislé souřadnice β 3, β 4, β 5 a β 6 Podmínky uzavřenosti vektorových mnohoúhelníků b 1 + b 2 + b 3 + b 4 = 0 b 4 + b 5 + b 6 + b 7 +b 8 = 0
8 Vazbové podmínky pro řešení kinematických úloh Poloha x: b 1 cos β 1 + b 2 cos β 2 + b 3 cos β 3 + b 4 cos β 4 = 0 y: b 1 sin β 1 + b 2 sin β 2 + b 3 sin β 3 + b 4 sin β 4 = 0 x: b 4 cos β 4 + b 5 cos β 5 + b 6 cos β 6 + b 7 cos β 4 + b 8 cos β 8 = 0 y: b 4 sin β 4 + b 5 sin β 5 + b 6 sin β 6 + b 7 sin β 4 + b 8 sin β 8 = 0 Rychlost x: b 2 sin β 2 β 2 b 3 sin β 3 β 3 b 4 sin β 4 β 4 = 0 y: +b 2 cos β 2 β 2 +b 3 cos β 3 β 3 +b 4 cos β 4 β 4 = 0 x: b 4 sin β 4 β 4 b 5 sin β 5 β 5 b 6 sin β 6 β 6 b 7 sin β 4 β 4 = 0 y: b 4 cos β 4 β 4 +b 5 cos β 5 β 5 +b 6 cos β 6 β 6 +b 7 cos β 4 β 4 = 0
9 Vazbové podmínky pro řešení kinematických úloh Zrychlení x: b 2 cos β 2 β 2 2 b 2 sin β 2 β 2 b 3 cos β 3 β 3 2 b 3 sin β 3 β 3 b 4 cos β 4 β 4 2 b 4 sin β 4 β 4 = 0 y: b 2 sin β 2 β 2 2 +b 2 cos β 2 β 2 b 3 sin β 3 β 3 2 +b 3 cos β 3 β 3 b 4 sin β 4 β 4 2 +b 4 cos β 4 β 4 = 0 x: b 4 cos β 4 β 2 4 b 4 sin β 4 β 4 b 5 cos β 5 β 2 5 b 5 sin β 5 cos β 4 β 2 4 b 7 sin β 4 β 4 = 0 β 5 b 6 cos β 6 β 6 2 b 6 sin β 6 β 6 b 7 y: b 4 sin β 4 β 4 2 +b 4 cos β 4 β 4 b 5 sin β 5 β 5 2 +b 5 cos β 5 β 5 b 6 sin β 6 β 6 2 +b 6 cos β 6 β 6 b 7 sin β 4 β 2 4 +b 7 cos β 4 β 4 = 0
10 Řešení úlohy polohy f z, q = 0 J z z k + f z k, q = 0 z i+1 = z i+1 + λ k Δz i J z = b 3 sin β 3 b 4 sin β 4 ) 0 0 +b 3 cos β 3 +b 4 cos β 4 ) b 4 sin β 4 ) b 7 sin β 4 ) b 5 sin β 5 ) b 6 sin β 6 ) 0 +b 4 cos β 4 ) + b 7 cos β 4 ) +b 5 cos β 5 ) +b 6 cos β 6 ) J q = b 2 sin β 2 +b 2 cos β 2 0 0
11 Řešení úlohy rychlosti a zrychlení Řešení rychlostí J z z + J q q = 0 Řešení zrychlení J z z + J q q + j qz = 0 j qz = b 2 cos β 2 β 2 2 b 3 cos β 3 β 3 2 b 4 cos β 4 ) β 4 2 b 2 sin β 2 β 2 2 b 3 sin β 3 β 3 2 b 4 sin β 4 ) β 4 2 b 4 co s β 4 ) b 7 co s β 4 )) β 4 2 b 5 co s β 5 ) β 5 2 b 6 cos β 6 ) β 6 2 b 4 si n β 4 ) b 7 si n β 4 )) β 4 2 b 5 si n β 5 ) β 5 2 b 6 si n β 6 ) β 6 2
12 Řešení úlohy pohybu vybraného bodu r S5 = b 1 + b 4 + b 7 + x 5T + y 5T x S5 = b 1 cos β 1 + b 4 cos β 4 + b 7 cos β 4 + x 5T cos β 5 y 5T sin β 5 y S5 = b 1 sin β 1 + b 4 sin β 4 + b 7 sin β 4 + x 5T sin β 5 +y 5T cos β 5 v S5 x = b 4 sin β 4 β 4 b 7 sin β 4 β 4 x 5T sin β 5 β 5 y 5T cos β 5 β 5 v S5 y = +b 4 cos β 4 β 4 +b 7 cos β 4 β 4 + x 5T cos β 5 β 5 y 5T sin β 5 β 5 a S5 x = b 4 cos β 4 β 2 4 b 4 sin β 4 β 4 b 7 cos β 4 β 2 4 b sin β 4 β 4 x 5T cos β 5 β 5 x5t sin β 5 β 5 +y 5T sin β 5 β 5 y5t cos β 5 a S5 y = b 4 sin β 4 β 2 4 +b 4 cos β 4 β 4 b 7 sin β 4 β 2 4 +b cos β 4 β 4 x 5T sin β 5 β 5 + x5t cos β 5 β 5 y 5T cos β 5 β 5 y5t sin β 5 β 5 β 5
13 Výstupní grafy z program KRESIC Vypočteno z rovnoměrného otáčivého pohybu tělesa 2 okolo bodu A

14 Animace pohybu mechanismu
15 Dynamický model Fowlerovy klapky přímá úloha Rovnice pro vypočet dynamické úlohy Ma = DR + Q Síla -> pohyb a = V z z + V q q + a qz J z z + J q q + j qz = 0 M D I 0 3 V z V q J z J q a R z q = Q a qz j qz r S = j b j + x S + y S a S = b j + x S + y S. j



16 Schémata pro popis středů hmotnosti
17 Rovnice pro popis pohybu středu hmotnosti a úhlových veličin tělesa 6 x S6 = b 2 cos β 2 b 3 cos β 3 + b 5 cos β 5 + b 7 cos β 4 + t 6 cos β 6 y S6 = b 2 sin β 2 b 3 sin β 3 + b 5 sin β 5 + b 7 sin β 4 + t 6 sin β 6 α 6 = β 6 v S6 x = +b 2 sin β 2 β 2 + b 3 sin β 3 β 3 b 5 sin β 5 β 5 b 7 sin β 4 β 4 t 6 sin β 6 ) β 6 v S6 y = b 2 cos β 2 β 2 b 3 cos β 3 β 3 + b 5 cos β 5 β 5 + b 7 cos β 4 β 4 + t 6 cos β 6 ) β 6 α 6 = β 6 a S6 x = +b 2 cos β 2 β 2 2 +b 2 sin β 2 β 2 +b 3 cos β 3 β 2 3 +b 3 sin β 3 β 3 b 5 cos β 5 β 2 5 b 5 sin β 5 β 5 b 7 cos β 4 β 2 4 b 7 sin β 4 β 4 t 6 cos β 6 β 2 6 t 6 sin β 6 β 6 a S6 y = +b 2 sin β 2 β 2 2 b 2 cos β 2 β 2 +b 3 sin β 3 β 2 3 b 3 cos β 3 β 3 b 5 sin β 5 β 2 5 +b 5 cos β 5 β 5 b 7 sin β 4 β 2 4 +b 7 cos β 4 β 4 t 6 sin β 6 β 2 6 +t 6 cos β 6 α 6 = β 6 β 6

18 Schémata uvolněných těles pro sestavení Newton-Eulerových rovnic
19 Uvolněním těles a sestavením Newton-Eulerových rovnic příklad na tělese 5 m 5 a 5x = R Ex + R Fx F t cos φ F + F n sin φ F ) m 5 a 5y = R Ey + R Fy + F t sin φ F + F n cos φ F ) m 5 g I 5S5 α 5 = R Ex t 5x sin β 5 +R Ey t 5x cos β 5 R Ex t 5y cos β 5 R Ey t 5y sin β 5 R Fx l 5 t 5x ) sin β 5 +R Fy l 5 t 5x ) cos β 5 +R Fx t 5y cos β 5 +R Fy t 5y sin β 5 + F t cos δ F n si n δ)) y F t 5y ) F t sin δ + F n cos δ)) t 5x x F )

20 Průběh aerodynamických sil ve složkách
21 Dynamický model Fowlerovy klapky pro inverzní úlohu J z z + J q q = j qz Pohyb -> síla Ia V z z V q q = a qz Ma DR km 2 = Q q = 0 M D k 0 0 I 0 0 V z V q J z0 J q I a R M 2 z q = Q a qz j qz 0
22 Průběh výsledné silové dvojice vypočtené z inverzní dynamické úlohy Základní parametr pohonu je kroutící moment potřebný pro vysunutí klapky. Pro náš případ musí být krouticí moment alespoň 1000Nm.

23 Spojení přímé a nepřímé dynamické úlohy pro ověření hnací silové dvojice Pro stabilní pohyb je třeba zpětnovazební řízení
24 Závěr Postupně byly splněny všechny cíle bakalářské práce 1. Vypracoval jsem rešerši různých konstrukčních řešení vztlakové klapky křídla 2. Seznámil jsem se s metodami řešení kinematiky a dynamiky mechanismů 3. Sestavil jsem matematický model pro Fowlerův mechanismus 4. S pomocí programů KRESIC a DRESIC jsem vyřešil pohyb mechanismu a navrhnul parametry pohonu
25 Děkuji Vám za pozornost
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole
 Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMOBILNÍHO A DOPRAVNÍHO INŽENÝRSTVÍ FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMOTIVE ENGINEERING
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Dynamika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Řešení úloh 1. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů. = 30 s.
 Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
FYZIKA I. Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Obr. 9.1 Kontakt pohyblivé části s povrchem. Tomuto meznímu stavu za klidu odpovídá maximální síla, která se nezývá adhezní síla,. , = (9.
 9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Kinematika robotických systémů
 Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
VÝPOČET DYNAMICKÝCH CHARAKTERISTIK STROJNÍHO ZAŘÍZENÍ POMOCÍ MATLABU
 VÝPOČET DYNAMCKÝCH CHARAKTERSTK STROJNÍHO ZAŘÍZENÍ POMOCÍ MATLABU Rade Havlíče, Jiří Vondřich Katedra mechaniy a materiálů, Faulta eletrotechnicá ČVUT Praha Abstrat Jednotlivé části strojního zařízení
VÝPOČET DYNAMCKÝCH CHARAKTERSTK STROJNÍHO ZAŘÍZENÍ POMOCÍ MATLABU Rade Havlíče, Jiří Vondřich Katedra mechaniy a materiálů, Faulta eletrotechnicá ČVUT Praha Abstrat Jednotlivé části strojního zařízení
Moment síly výpočet
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P01 KINEMATIKA HMOTNÉHO BODU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. Ing. Bohumil Koktavý,CSc. FYZIKA PRŮVODCE GB01-P01 KINEMATIKA HMOTNÉHO BODU STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA 2 OBSAH
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. Ing. Bohumil Koktavý,CSc. FYZIKA PRŮVODCE GB01-P01 KINEMATIKA HMOTNÉHO BODU STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA 2 OBSAH
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
1 Rozdělení mechaniky a její náplň 2
 Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................
Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................
Sestavení diferenciální a diferenční rovnice. Petr Hušek
 Sestavení diferenciální a diferenční rovnice Petr Hušek Sestavení diferenciální a diferenční rovnice Petr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVU v Praze MAS 1/13 ČVU
Sestavení diferenciální a diferenční rovnice Petr Hušek Sestavení diferenciální a diferenční rovnice Petr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVU v Praze MAS 1/13 ČVU
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Elektronický učební text pro podporu výuky klasické mechaniky pro posluchače učitelství I. Mechanika hmotného bodu
 Elektronický učební text pro podporu výuky klasické mechaniky pro posluchače učitelství I Mechanika hmotného bodu Autor: Kateřina Kárová Text vznikl v rámci bakalářské práce roku 2006. Návod na práci s
Elektronický učební text pro podporu výuky klasické mechaniky pro posluchače učitelství I Mechanika hmotného bodu Autor: Kateřina Kárová Text vznikl v rámci bakalářské práce roku 2006. Návod na práci s
Derivace funkce. Přednáška MATEMATIKA č Jiří Neubauer
 Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
Modelování a simulace
 Modelování a simulace Modelování mechanických systémů Doc. Ing. Pavel Václavek, Ph.D. Modelování a simulace Mechanické systémy - str. 1/14 přednášky Modelování a simulace Mechanické systémy - str. 2/14
Modelování a simulace Modelování mechanických systémů Doc. Ing. Pavel Václavek, Ph.D. Modelování a simulace Mechanické systémy - str. 1/14 přednášky Modelování a simulace Mechanické systémy - str. 2/14
Příloha-výpočet motoru
 Příloha-výpočet motoru 1.Zadané parametry motoru: vrtání d : 77mm zdvih z: 87mm kompresní poměr ε : 10.6 atmosférický tlak p 1 : 98000Pa teplota nasávaného vzduchu T 1 : 353.15K adiabatický exponent κ
Příloha-výpočet motoru 1.Zadané parametry motoru: vrtání d : 77mm zdvih z: 87mm kompresní poměr ε : 10.6 atmosférický tlak p 1 : 98000Pa teplota nasávaného vzduchu T 1 : 353.15K adiabatický exponent κ
Kinematika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
Kinematika pístní skupiny
 Kinematika pístní skupiny Centrický mechanismus s = r( cos(α)) + l [ ( λ 2 sin 2 α) 2] Dva členy z binomické řady s = r [( cos (α)) + λ ( cos (2α))] 4 I. harmonická s I = r( cos (α)) II. harmonická s II
Kinematika pístní skupiny Centrický mechanismus s = r( cos(α)) + l [ ( λ 2 sin 2 α) 2] Dva členy z binomické řady s = r [( cos (α)) + λ ( cos (2α))] 4 I. harmonická s I = r( cos (α)) II. harmonická s II
E K O G Y M N Á Z I U M B R N O o.p.s. přidružená škola UNESCO
 Seznam výukových materiálů III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Tematická oblast: Předmět: Vytvořil: MECHANIKA FYZIKA JANA SUCHOMELOVÁ 01 - Soustava SI notebook VY_32_INOVACE_01.pdf Datum
Seznam výukových materiálů III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Tematická oblast: Předmět: Vytvořil: MECHANIKA FYZIKA JANA SUCHOMELOVÁ 01 - Soustava SI notebook VY_32_INOVACE_01.pdf Datum
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
SIMULAČNÍ MODELOVÁNÍ PARALELNÍHO MECHANISMU TYPU RPR
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF SOLID MECHANICS,
Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
s 1 = d t 2 t 1 t 2 = 71 m. (2) t 3 = d v t t 3 = t 1t 2 t 2 t 1 = 446 s. (3) s = v a t 3. d = m.
 t 3 = d v t t 3 = t 1t 2 t 2 t 1 = 446 s. (3) s = v a t 3. d = m.") Řešení úloh 1. kola 58. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů 1.a) Označme v a velikost rychlosti atleta, v t velikost rychlosti trenéra. Trenér do prvního setkání ušel dráhu s 1
Řešení úloh 1. kola 58. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů 1.a) Označme v a velikost rychlosti atleta, v t velikost rychlosti trenéra. Trenér do prvního setkání ušel dráhu s 1
Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu
 Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu Václav Čibera 12. února 2009 1 Motivace Na obrázku 1 máme znázorněný mechanický systém, který může představovat
Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu Václav Čibera 12. února 2009 1 Motivace Na obrázku 1 máme znázorněný mechanický systém, který může představovat
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole
 5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
5. Stanovení tíhového zrychlení reverzním kyvadlem a studium gravitačního pole 5.1. Zadání úlohy 1. Určete velikost tíhového zrychlení pro Prahu reverzním kyvadlem.. Stanovte chybu měření tíhového zrychlení.
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Mechanika - kinematika
 Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA
 ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA Zpracoval Doc. RNDr. Zdeněk Hlaváč, CSc Pojem šroubového pohybu Šroubový pohyb je definován jako pohyb, jejž lze ve vhodném referenčním bodě rozložit
ŠROUBOVÝ A PROSTOROVÝ POHYB ROTAČNĚ SYMETRICKÉHO TĚLESA Zpracoval Doc. RNDr. Zdeněk Hlaváč, CSc Pojem šroubového pohybu Šroubový pohyb je definován jako pohyb, jejž lze ve vhodném referenčním bodě rozložit
Mechanika úvodní přednáška
 Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
ALGEBRA. Téma 5: Vektorové prostory
 SLEZSKÁ UNIVERZITA V OPAVĚ Matematický ústav v Opavě Na Rybníčku 1, 746 01 Opava, tel. (553) 684 611 DENNÍ STUDIUM Téma 5: Vektorové prostory Základní pojmy Vektorový prostor nad polem P, reálný (komplexní)
SLEZSKÁ UNIVERZITA V OPAVĚ Matematický ústav v Opavě Na Rybníčku 1, 746 01 Opava, tel. (553) 684 611 DENNÍ STUDIUM Téma 5: Vektorové prostory Základní pojmy Vektorový prostor nad polem P, reálný (komplexní)
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Matematika 1. 1 Derivace. 2 Vlastnosti a použití. 3. přednáška ( ) Matematika 1 1 / 16
 Matematika 1 1 / 16") Matematika 1 3. přednáška 1 Derivace 2 Vlastnosti a použití 3. přednáška 6.10.2009) Matematika 1 1 / 16 1. zápočtový test již během 2 týdnů. Je nutné se něj registrovat přes webové rozhraní na https://amos.fsv.cvut.cz.
Matematika 1 3. přednáška 1 Derivace 2 Vlastnosti a použití 3. přednáška 6.10.2009) Matematika 1 1 / 16 1. zápočtový test již během 2 týdnů. Je nutné se něj registrovat přes webové rozhraní na https://amos.fsv.cvut.cz.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 1/99 Výpočet zeměpisné šířky z měřených
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 1/99 Výpočet zeměpisné šířky z měřených
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických
 Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Popis kmitání vibrační třídičky s více stupni volnosti pomocí numerických metod Bc. Oskar Turek, Ing. Jan Hoidekr ČVUT v Praze, Fakulta strojní, Ústav konstruování a částí stojů, Technická 4, 166 07 Praha
Fyzika - Kvinta, 1. ročník
 - Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
- Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
Termomechanika 10. přednáška Doc. Dr. RNDr. Miroslav Holeček
 Termomechanika 10. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
Termomechanika 10. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
Statika soustavy těles.
 Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Odchylka ekliptiky od roviny Galaxie
 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Graf závislosti dráhy s na počtu kyvů n 2 pro h = 0,2 m. Graf závislosti dráhy s na počtu kyvů n 2 pro h = 0,3 m
 Řešení úloh 1. kola 59. ročníku fyzikální olympiády. Kategorie B Autoři úloh: J. Thomas (1,, 3, 4, 7), J. Jírů (5), P. Šedivý (6) 1.a) Je-li pohyb kuličky rovnoměrně zrychlený, bude pro uraženou dráhu
Řešení úloh 1. kola 59. ročníku fyzikální olympiády. Kategorie B Autoři úloh: J. Thomas (1,, 3, 4, 7), J. Jírů (5), P. Šedivý (6) 1.a) Je-li pohyb kuličky rovnoměrně zrychlený, bude pro uraženou dráhu
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
Merkur perfekt Challenge Studijní materiály
 Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
Merkur perfekt Challenge Studijní materiály T: 541 146 120 IČ: 00216305, DIČ: CZ00216305 / www.feec.vutbr.cz/merkur / steffan@feec.vutbr.cz 1 / 15 Název úlohy: Kresba čtyřlístku pomocí robotické ruky Anotace:
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU
 PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
Nelineární optimalizace a numerické metody (MI NON)
") Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Diplomová práce Prostředí pro programování pohybu manipulátorů
 Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Diplomová práce Prostředí pro programování pohybu manipulátorů Štěpán Ulman 1 Úvod Motivace: Potřeba plánovače prostorové trajektorie pro výukové účely - TeachRobot Vstup: Zadávání geometrických a kinematických
Praktikum z astronomie 0. Měření refrakce. Zadání
 20. února 2007 Praktikum z astronomie 0 Zadání Astronomická refrakce Úkolem je určit polohu zapadajícího nebo vycházejícího nebeského tělesa měřením a výpočtem. str. 48 Teodolitem změřte polohu známého
20. února 2007 Praktikum z astronomie 0 Zadání Astronomická refrakce Úkolem je určit polohu zapadajícího nebo vycházejícího nebeského tělesa měřením a výpočtem. str. 48 Teodolitem změřte polohu známého
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
1. Řešená konstrukce Statické řešení Výpočet průhybové čáry Dynamika Vlastní netlumené kmitání...
 . Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
. Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
Digital Control of Electric Drives. Vektorové řízení asynchronních motorů. České vysoké učení technické Fakulta elektrotechnická
 Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Digital Control of Electric Drives Vektorové řízení asynchronních motorů České vysoké učení technické Fakulta elektrotechnická B1M14DEP O. Zoubek 1 MOTIVACE Nevýhody skalárního řízení U/f: Velmi nízká
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
21ˆx 0 mod 112, 21x p 35 mod 112. x p mod 16. x 3 mod 17. α 1 mod 13 α 0 mod 17. β 0 mod 13 β 1 mod 17.
 1. 2. test - varianta A Příklad 1.1. Kompletně vyřešte rovnici 21x 35 mod 112. Řešení. Protože gcd(112, 21) 21 má dle Frobeniovy věty rovnice řešení. Řešení nalezneme ve dvou krocích. Nejprve kompletně
1. 2. test - varianta A Příklad 1.1. Kompletně vyřešte rovnici 21x 35 mod 112. Řešení. Protože gcd(112, 21) 21 má dle Frobeniovy věty rovnice řešení. Řešení nalezneme ve dvou krocích. Nejprve kompletně
Řešení úloh 1. kola 47. ročníku fyzikální olympiády. Kategorie C. t 1 = v 1 g = b gt t 2 =2,1s. t + gt ) 2
 2") Řešení úloh. kola 47. ročníku fyzikální olympiády. Kategorie C Autořiúloh:R.Baník(3),I.Čáp(),M.Jarešová(6),J.Jírů()aP.Šedivý(4,5,7).a) Pohybtělesajerovnoměrnězrychlenýsezrychlením g. Je-li v rychlost u
Řešení úloh. kola 47. ročníku fyzikální olympiády. Kategorie C Autořiúloh:R.Baník(3),I.Čáp(),M.Jarešová(6),J.Jírů()aP.Šedivý(4,5,7).a) Pohybtělesajerovnoměrnězrychlenýsezrychlením g. Je-li v rychlost u
f(x) = arccotg x 2 x lim f(x). Určete všechny asymptoty grafu x 2 2 =
 = arccotg x 2 x lim f(x). Určete všechny asymptoty grafu x 2 2 =") Řešení vzorové písemky z předmětu MAR Poznámky: Řešení úloh ze vzorové písemky jsou formulována dosti podrobně podobným způsobem jako u řešených příkladů ve skriptech U zkoušky lze jednotlivé kroky postupu
Řešení vzorové písemky z předmětu MAR Poznámky: Řešení úloh ze vzorové písemky jsou formulována dosti podrobně podobným způsobem jako u řešených příkladů ve skriptech U zkoušky lze jednotlivé kroky postupu
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109. Josef Gruber MECHANIKA
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Josef Gruber MECHANIKA SOUBOR PŘÍPRAV PRO 2. R. OBORU 26-41-M/01 ELEKTRO- TECHNIKA - MECHATRONIKA Vytvořeno
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJNICKÁ A STŘEDNÍ ODBORNÁ ŠKOLA PROFESORA ŠVEJCARA, PLZEŇ, KLATOVSKÁ 109 Josef Gruber MECHANIKA SOUBOR PŘÍPRAV PRO 2. R. OBORU 26-41-M/01 ELEKTRO- TECHNIKA - MECHATRONIKA Vytvořeno
Matematika vzorce. Ing. Petr Šídlo. verze
 Matematika vzorce Ing. Petr Šídlo verze 0050409 Obsah Jazyk matematiky 3. Výrokový počet.......................... 3.. Logické spojky...................... 3.. Tautologie výrokového počtu...............
Matematika vzorce Ing. Petr Šídlo verze 0050409 Obsah Jazyk matematiky 3. Výrokový počet.......................... 3.. Logické spojky...................... 3.. Tautologie výrokového počtu...............
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
1/15. Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 1/15 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu 2/15 Vsuvka: Vlastní čísla matic Definice: Bud A čtvercová matice a vektor h 0 splňující rovnici A h = λ h pro nějaké číslo λ R. Potom λ nazýváme
1/15 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu 2/15 Vsuvka: Vlastní čísla matic Definice: Bud A čtvercová matice a vektor h 0 splňující rovnici A h = λ h pro nějaké číslo λ R. Potom λ nazýváme
Termomechanika 12. přednáška Doc. Dr. RNDr. Miroslav Holeček
 Termomechanika 2. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
Termomechanika 2. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
POČÍTAČOVÉ ANALÝZY MECHANISMŮ
 POČÍTAČOVÉ ANALÝZY MECHANISMŮ ŠMERINGAIOVÁ Anna, SK Resumé V příspěvku je uvedeno zhodnocení přípravy, průběhu a výsledků výuky předmětu "Počítačové analýzy mechanismů" v jeho prvním "pilotním ročníku".
POČÍTAČOVÉ ANALÝZY MECHANISMŮ ŠMERINGAIOVÁ Anna, SK Resumé V příspěvku je uvedeno zhodnocení přípravy, průběhu a výsledků výuky předmětu "Počítačové analýzy mechanismů" v jeho prvním "pilotním ročníku".
f x = f y j i y j x i y = f(x), y = f(y),
, y = f(y),") Cvičení 1 Definice δ ij, ε ijk, Einsteinovo sumační pravidlo, δ ii, ε ijk ε lmk. Cvičení 2 Štoll, Tolar: D3.55, D3.63 Cvičení 3 Zopakujte si větu o derivovování složené funkce více proměnných (chain rule).
Cvičení 1 Definice δ ij, ε ijk, Einsteinovo sumační pravidlo, δ ii, ε ijk ε lmk. Cvičení 2 Štoll, Tolar: D3.55, D3.63 Cvičení 3 Zopakujte si větu o derivovování složené funkce více proměnných (chain rule).
STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE
 DANIEL TUREČEK 2005 / 2006 1. 412 5. 14.3.2006 28.3.2006 5. STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE 1. Úkol měření 1. Určete velikost tíhového zrychlení pro Prahu reverzním
DANIEL TUREČEK 2005 / 2006 1. 412 5. 14.3.2006 28.3.2006 5. STANOVENÍ TÍHOVÉHO ZRYCHLENÍ REVERZNÍM KYVADLEM A STUDIUM GRAVITAČNÍHO POLE 1. Úkol měření 1. Určete velikost tíhového zrychlení pro Prahu reverzním
MASARYKOVA UNIVERZITA PEDAGOGICKÁ FAKULTA KATEDRA GEOGRAFIE. Planetární geografie seminář
 MASARYKOA UNIERZITA PEDAGOGICKÁ FAKULTA KATEDRA GEOGRAFIE květen 2008 I Měření vzdáleností ve vesmíru 1) ýpočet hodnoty pc a ly ze známé AU a převod těchto hodnot. 1 AU = 150 10 6 km Z definice paralaxy
MASARYKOA UNIERZITA PEDAGOGICKÁ FAKULTA KATEDRA GEOGRAFIE květen 2008 I Měření vzdáleností ve vesmíru 1) ýpočet hodnoty pc a ly ze známé AU a převod těchto hodnot. 1 AU = 150 10 6 km Z definice paralaxy
TÝMOVÁ CVIČENÍ PŘEDMĚTU APLIKOVANÁ MECHANIKA
 Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní TÝMOVÁ CVIČENÍ PŘEDMĚTU APLIKOVANÁ MECHANIKA Návody k zpracování týmových projektů Ing. Milada Hlaváčková, Ph.D. Ostrava 2011 Tyto studijní
Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní TÝMOVÁ CVIČENÍ PŘEDMĚTU APLIKOVANÁ MECHANIKA Návody k zpracování týmových projektů Ing. Milada Hlaváčková, Ph.D. Ostrava 2011 Tyto studijní
Příklad 5.3. v 1. u 1 u 2. v 2
 Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa
 pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
pracovní list studenta Kmitání Studium kmitavého pohybu a určení setrvačné hmotnosti tělesa Výstup RVP: Klíčová slova: Eva Bochníčková žák měří vybrané veličiny vhodnými metodami, zpracuje získaná data
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Cvičné texty ke státní maturitě z matematiky
 Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179