ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
|
|
|
- Radomír Říha
- před 6 lety
- Počet zobrazení:
Transkript
1 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D.
2 Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2) Dynamika nerotujících systémů (Prof. Zeman) 3) Dynamika rotujících systémů (Prof. Zeman) 4) Dynamika vázaných mechanických systémů (Dr. Hajžman) 5) Úvod do pružnosti a pevnosti (Prof. Laš) 6) Mechanika kompozitních materiálů I (Prof. Laš) 7) Mechanika kompozitních materiálů II (Dr. Zemčík) 8) Experimentální mechanika (Prof. Plánička, Ing. Káňa) 9) Mechanika tekutin (Dr. Vimmr) 10) Biomechanika I (Prof. Křen) 11) Biomechanika II (Dr. Hynčík, Prof. Rosenberg) 12) Mechanika mikrostruktur (Doc. Holeček) 13) Závěrečná shrnující přednáška, zápočet (Dr. Hajžman)
3 Podmínky zápočtu Úvod do modelování v mechanice (UMM) Písemný test složený z jednoduchých otázek na látku probíranou při přednáškách Proběhne na poslední přednášce Některé otázky budou na webu Další informace
4 OBSAH 1. Úvod a motivace 2. Soustavy těles (kinematický popis a dynamika) 3. Programové prostředky pro úlohy dynamiky soustav těles 4. Ukázky prací studentů 5. Ukázky aplikací z praxe 6. Optimalizace 7. Závěr
 Velkou třídu reálných problémů lze")

5 Úvod a motivace Úvod do modelování v mechanice (UMM) Velkou třídu reálných problémů lze modelovat jako vázanou soustavu těles, přičemž tělesa konají obecný rovinný nebo prostorový pohyb Zdroj: SIMPACK
6 Úvod a motivace Úvod do modelování v mechanice (UMM) Vzhledem k vylepšování a optimalizaci díla (stroje, vozidla, mechanismu ) již v předvýrobní fázi je nutné umět vytvářet virtuální modely a zvládnout techniky pro jejich analýzu Rozvoj metod s rozvojem počítačů (mechanika, numerická matematika, grafika) Dokumentace (výkresová, tabulky, ) Virtuální (počítačový) model (nejprve fyzikální model, z něho matematický) Analýza (řešení) vytvořeného matematického modelu Případná modifikace
7 Vázané mechanické systémy (VMS) Soustavy navzájem svázaných těles, které se vůči sobě mohou relativně pohybovat a na které mohou působit různé síly a momenty, jež ovlivňují pohyb celé soustavy Základní rám tuhé a nepohyblivé těleso, pohyb ostatních těles je zpravidla vztažen k rámu Tuhá tělesa dva libovolné body tělesa nemění při pohybu svoji vzdálenost Kinematická vazba pohyblivé spojení mezi dvěma tělesy vymezující jejich relativní pohyb Počet stupňů volnosti počet nezávislých souřadnic, které jednoznačné určují polohu soustavy (společně se známými geometrickými parametry), n
8 Vázané mechanické systémy (VMS) Kinematická analýza řeší pohyb mechanické soustavy bez ohledu na působící síly Dynamická analýza řeší pohyb soustavy jako důsledek působících sil Statická analýza, kinetostatická analýza
9 Tuhá tělesa Úvod do modelování v mechanice (UMM) Vázané mechanické systémy (VMS) volné těleso má 6 stupňů volnosti v prostoru, 3 stupně volnosti v rovině Definovány svojí hmotností m [kg], polohou těžiště [m] maticí setrvačnosti [kg m 2 ] v definovaném souřadnicovém systému (momenty setrvačnosti I x, I y, I z, deviační momenty ) Tyto parametry jsou nutné pro sestavení matematického modelu VMS Výpočet parametrů je prováděn pro reálné konstrukce pomocí speciálních programových prostředků
10 Vázané mechanické systémy (VMS) Kinematické vazby (příklady) (a) Rotační (b) Posuvná (c) Zubová (d) Obecná (vačka) (e) Šroubová (f) Sférická
11 Kinematický řetězec Otevřený Uzavřený Úvod do modelování v mechanice (UMM) Vázané mechanické systémy (VMS) Prvky modelů VMS Tuhá tělesa Kinematické vazby Diskrétní pružně-tlumicí členy Síly a momenty
12 Vázané mechanické systémy (VMS) Typy souřadnic popisující VMS (kinematický popis) Nezávislé souřadnice (jejich počet se rovná počtu souřadnic) Malý počet rovnic, obyčejné diferenciální rovnice (ODR) Závislé souřadnice Fyzikální souřadnice (poloha referenčního bodu tělesa a natočení tělesa, největší počet rovnic, algebro-diferenciální rovnice) Relativní souřadnice (poloha tělesa vzhledem k předchozímu tělesu, menší počet rovnic, více nelineární, algebro-diferenciální rovnice, mohou být současně nezávislé) Přirozené souřadnice (souřadnice bodů a souřadnice vektorů definujících natočení)
13 Vázané mechanické systémy (VMS) Některé způsoby sestavování pohybových rovnic (matematické modely) Analytická mechanika, např. Lagrangeovy rovnice E k kinetická energie, E p potenciální energie, R disipační funkce q vektor souřadnic VMS, Q vektor zobecněných sil λ vektor Lagrangeových multiplikátorů Φ vazbové rovnice, Φ q derivace vazbových rovnic podle q Automatické sestavovaní pomocí tzv. multibody formalismů
14 Vázané mechanické systémy (VMS) Řešení pohybových rovnic Po aplikaci Lagrangeových rovnic M matice hmotnosti VMS Numerické řešení obyčejných diferenciálních rovnic Numerické řešení algebro-diferenciálních rovnic
15 Programové prostředky pro úlohy VMS - Software pro statickou, kinematickou a dynamickou analýzu vázaných mechanických systémů (soustavy tuhých i poddajných těles, multibody systémy) léta minulého století (rozvoj výpočetních prostředků: hardware, numerické metody, počítačová grafika) - Automatické sestavování pohybových rovnic a jejich numerické řešení - Software ADAMS (USA) Uživatelé v ČR: ZČU v Plzni, ŠKODA Transportation, ŠKODA Auto, VSLIB, - Software SIMPACK (Německo) Uživatelé v ČR: ŠKODA VÝZKUM, ČVUT, TUV Auto CR (UVMV) - alaska, MADYMO, LMS Virtual Lab...
16 Programové prostředky pro úlohy VMS Příprava modelu řešení vyhodnocení výsledků (Preprocessor Solver Postprocessor) Dokumentace (výkresová, tabulky, ) Virtuální (počítačový) model (nejprve fyzikální model, z něho matematický) Analýza (řešení) vytvořeného matematického modelu Případná modifikace
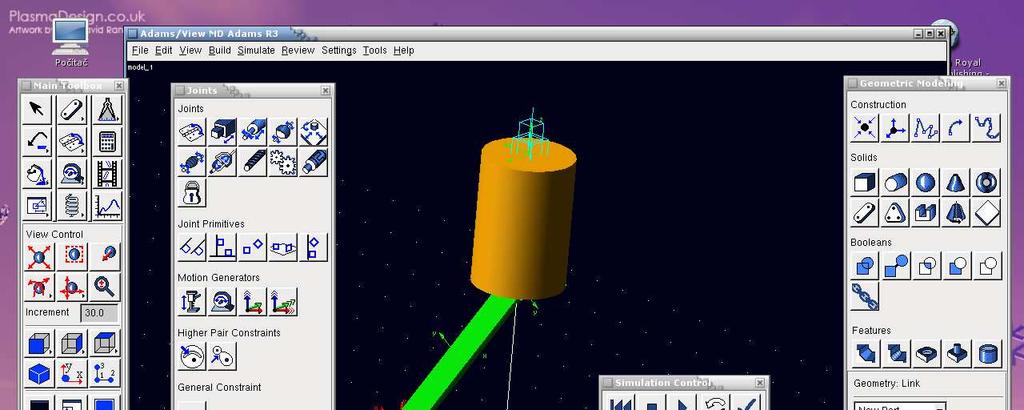

17
18 Ukázky prací studentů Předmět KME/ADAM, semestrální projekty PRJ2,3,4,5, bakalářské práce

19 Jednoduché mechanismy

20 Kráčející robot Úvod do modelování v mechanice (UMM)


21 Motocykl Úvod do modelování v mechanice (UMM)

22 Kulečník Úvod do modelování v mechanice (UMM)

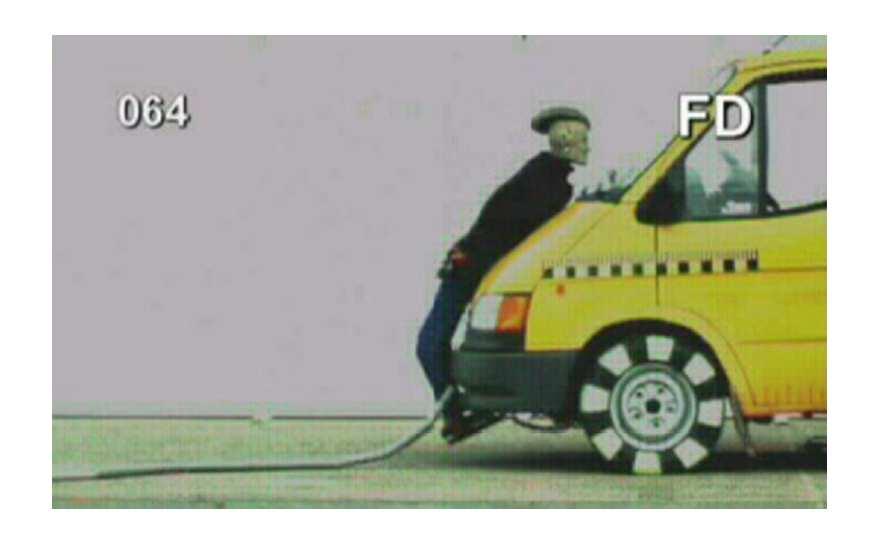
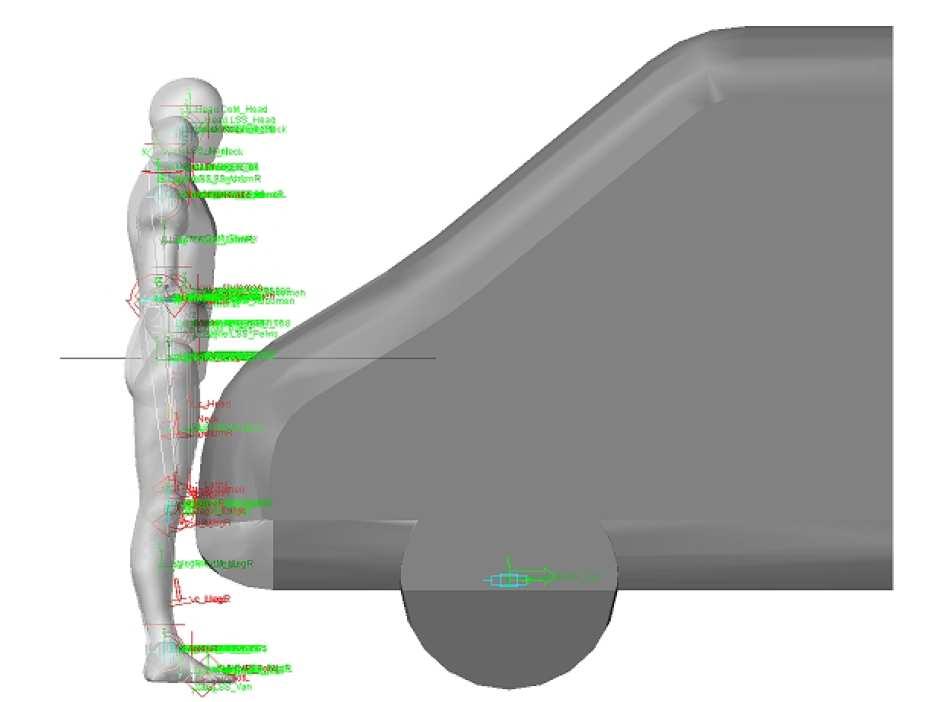
23 Lidské tělo Úvod do modelování v mechanice (UMM)

24 Lidské tělo Úvod do modelování v mechanice (UMM)
25 Praktická aplikace Dynamická analýza trolejbusu ŠKODA 21Tr Vytvořen komplexní model složený z tuhých těles Celkový model složen z tzv. substruktur reflektujících jednotlivé konstrukční části trolejbusu Vyšetřovány Vlastní frekvence a vlastní tvary trolejbusu Jízda přes definované nerovnosti Jízda do zatáčky s modelem řidiče Pomalý čelní náraz do překážky Brzdění a akcelerace
26
27
28 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Na počátku výkresová dokumentace
29 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Další krok vytvoření dynamického modelu (VMS) pro určení zatížení
30 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Dílčí úlohy experimentální identifikace modelu pneumatiky

31
32


33 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Dílčí úlohy validace komplexního dynamického modelu trolejbusu
 Další krok vytvoření modelu z poddajných těles a aplikace spočítaných zatížení (mechanika kontinua, experimentální")
34 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Další krok vytvoření modelu z poddajných těles a aplikace spočítaných zatížení (mechanika kontinua, experimentální mechanika)
 Další krok vytvoření modelu z poddajných těles a aplikace spočítaných zatížení (mechanika kontinua, experimentální")
35 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Další krok vytvoření modelu z poddajných těles a aplikace spočítaných zatížení (mechanika kontinua, experimentální mechanika)
36 Kombinace různých oborů mechaniky Příklad řešení reálného komplexního problému Analýza životnosti konstrukce trolejbusu (složitá úloha) Poslední krok Zpracováníčasových průběhů deformací získaných na poddajném modelu Vyhodnocení z hlediska živostnosti a lomové mechaniky (mechanika mikrostruktur)
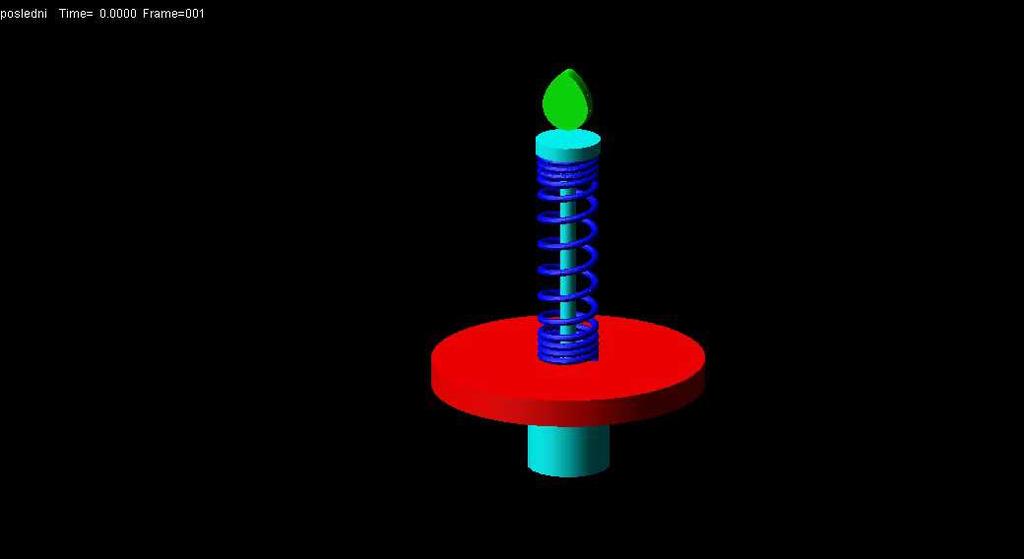
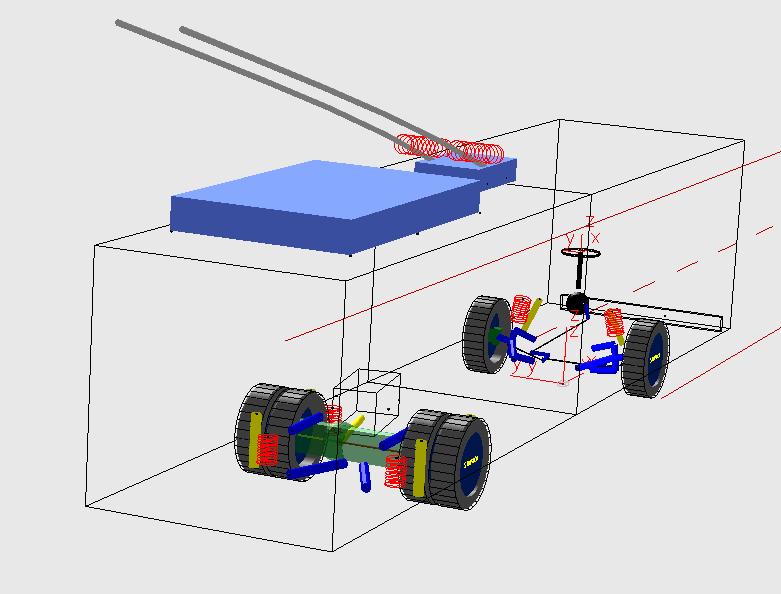
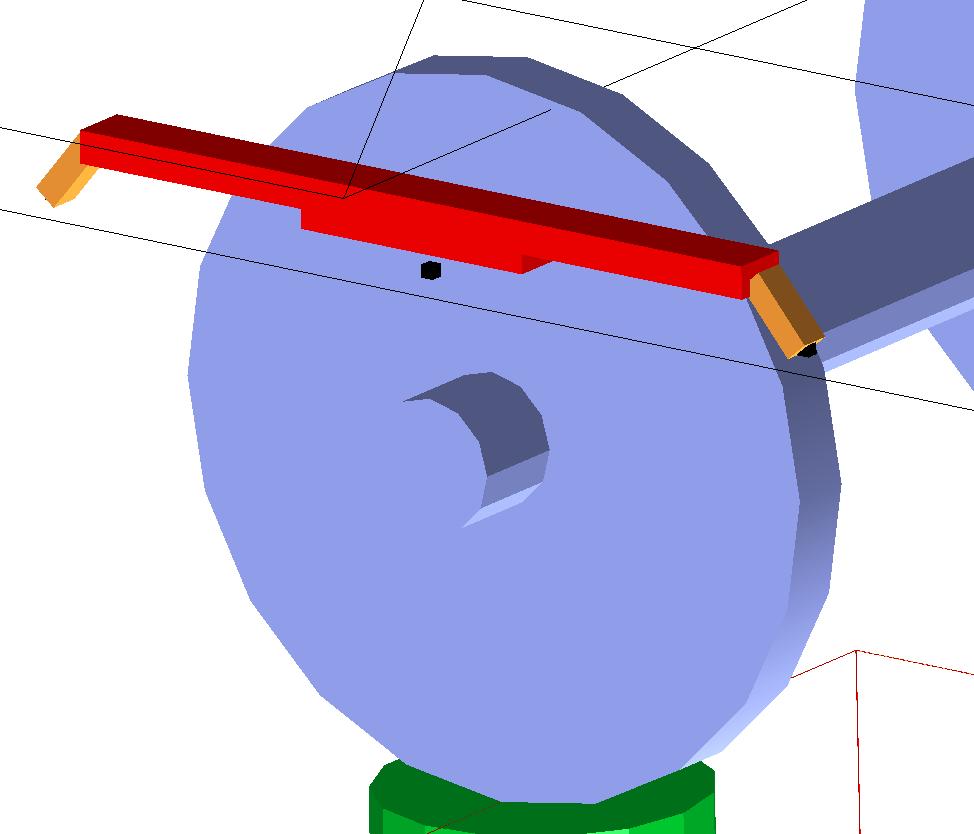
37 Praktická aplikace Dynamická analýza nákladního železničního vagonu Vytvořen komplexní model složený z tuhých těles Cílem bylo zejména detailní modelování listových pružin Ocelové a kompozitové pružiny Vytvořen detailní model pružiny Vlastnosti modelu naladěny na základě experimentálních měření Vyšetřována Dynamická odezva při kinematickém buzení vagonu na hydraulických válcích Různé režimy zatěžování Srovnání s experimentálním měřením na zkušebně

38


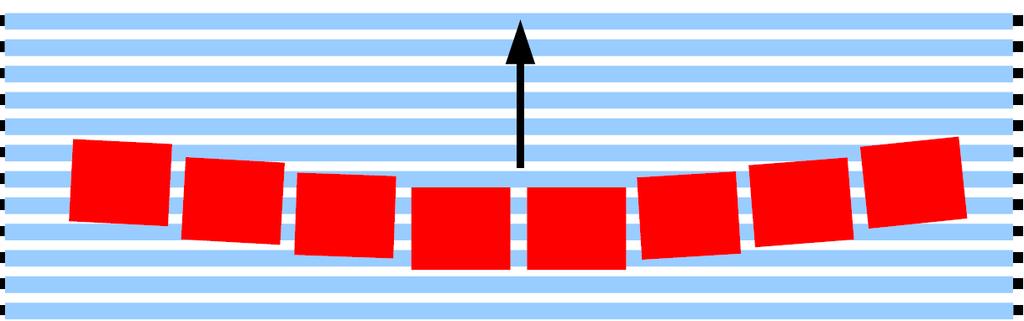
39 Praktická aplikace Transport dlaždiček pomocí rotujících válečků Problém narušení řady dlaždiček při transportu vypalovací pecí Kontaktní úloha

40
41 6 Optimalizace Úvod do modelování v mechanice (UMM) Hledání parametrů modelu (díla) pro dosažení extrémních hodnot vybraných kritéríí Konstrukční parametry Cílová funkce funkce konstrukčních parametrů kvantifikující zvolená kritéria Omezující (vazbové) podmínky definují přípustnou oblast konstrukčních parametrů Metody řešení Analytické (základní matematika) Numerické Deterministické (gradientní metody, ) Stochastické (simplexové, evoluční, genetické)
42 Ukázka optimalizace (minimalizace) hluku
")
43 Ukázka optimalizace (minimalizace) hluku
44 Ukázka optimalizace (minimalizace) hluku

45 Ukázka topologické optimalizace

46 Ukázka topologické optimalizace
47 7 ZÁVĚR Mechanika, dynamika Modelování Vázané mechanické soustavy Experimenty Problémy mechaniky jsou provázány s jinými vědními obory Matematika Počítačové vědy (HW, SW, grafika, databáze) Strojírenství, stavebnictví Lékařské vědy
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
ÚVOD DO MODELOVÁNÍ V MECHANICE
 ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny
 Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
Určení hlavních geometrických, hmotnostních a tuhostních parametrů železničního vozu, přejezd vozu přes klíny Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ.1.07/2.3.00/45.0029 V
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB D24FZS
 OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
OPTIMALIZACE A MULTIKRITERIÁLNÍ HODNOCENÍ FUNKČNÍ ZPŮSOBILOSTI POZEMNÍCH STAVEB Optimalizace a multikriteriální hodnocení funkční způsobilosti pozemních staveb Anotace: Optimalizace objektů pozemních staveb
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
WP25: Pokročilé zkušební metody pro spalovací motory a hnací řetězec Vedoucí konsorcia podílející se na pracovním balíčku
 Popis obsahu balíčku WP25: Pokročilé zkušební metody pro spalovací motory a WP25: Pokročilé zkušební metody pro spalovací motory a Vedoucí konsorcia podílející se na pracovním balíčku TÜV SÜD Czech s.r.o.,
Popis obsahu balíčku WP25: Pokročilé zkušební metody pro spalovací motory a WP25: Pokročilé zkušební metody pro spalovací motory a Vedoucí konsorcia podílející se na pracovním balíčku TÜV SÜD Czech s.r.o.,
TÉMATA PROJEKTŮ KME/PRJ3 VYPSANÁ PRO ZIMNÍ SEMESTR AK. R. 2016/17. Katedra mechaniky
 TÉMATA PROJEKTŮ KME/PRJ3 VYPSANÁ PRO ZIMNÍ SEMESTR AK. R. 2016/17 Katedra mechaniky Informace PRJ3 Na každé téma se může zapsat pouze jeden student. Termín ukončení registrace na témata: 3/10/2016 Podmínky
TÉMATA PROJEKTŮ KME/PRJ3 VYPSANÁ PRO ZIMNÍ SEMESTR AK. R. 2016/17 Katedra mechaniky Informace PRJ3 Na každé téma se může zapsat pouze jeden student. Termín ukončení registrace na témata: 3/10/2016 Podmínky
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika)
") Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Modelování a simulace
 Modelování a simulace Modelování mechanických systémů Doc. Ing. Pavel Václavek, Ph.D. Modelování a simulace Mechanické systémy - str. 1/14 přednášky Modelování a simulace Mechanické systémy - str. 2/14
Modelování a simulace Modelování mechanických systémů Doc. Ing. Pavel Václavek, Ph.D. Modelování a simulace Mechanické systémy - str. 1/14 přednášky Modelování a simulace Mechanické systémy - str. 2/14
Fyzikální vzdělávání. 1. ročník. Učební obor: Kuchař číšník Kadeřník. Implementace ICT do výuky č. CZ.1.07/1.1.02/ GG OP VK
 Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 3 DYNAMIKA ROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. OBSAH 1. Úvod. Základní výpočtový model v rotujícím prostoru 3. Základní výpočtový model rotoru
Dynamika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
Projekt: Obor DS. Prezentace projektů FD 2010 Aktivní bezpečnost dopravních prostředků projekt k616 Bc. Petr Valeš
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Ústav K616 Projekt: AKTIVNÍ BEZPEČNOST DOPRAVNÍCH PROSTŘEDKŮ Obor DS Bc. Petr VALEŠ mail: valespe1@fd.cvut.cz tel.: 724753860 Ústav dopravní techniky
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Ústav K616 Projekt: AKTIVNÍ BEZPEČNOST DOPRAVNÍCH PROSTŘEDKŮ Obor DS Bc. Petr VALEŠ mail: valespe1@fd.cvut.cz tel.: 724753860 Ústav dopravní techniky
Centrum kompetence automobilového průmyslu Josefa Božka - Kolokvium Božek 2012, 6. 12. 2012 Roztoky -
 WP07: Zlepšení návrhu hnacích traktů vozidel s využitím virtuálního hnacího traktu Vedoucí konsorcia podílející se na pracovním balíčku Vysoké učení technické v Brně - prof. Ing. Václav Píštěk, DrSc. Členové
WP07: Zlepšení návrhu hnacích traktů vozidel s využitím virtuálního hnacího traktu Vedoucí konsorcia podílející se na pracovním balíčku Vysoké učení technické v Brně - prof. Ing. Václav Píštěk, DrSc. Členové
Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu
 Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu Václav Čibera 12. února 2009 1 Motivace Na obrázku 1 máme znázorněný mechanický systém, který může představovat
Sestavení pohybové rovnosti jednoduchého mechanismu pomocí Lagrangeových rovností druhého druhu Václav Čibera 12. února 2009 1 Motivace Na obrázku 1 máme znázorněný mechanický systém, který může představovat
Pružnost a pevnost. zimní semestr 2013/14
 Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Téma: Dynamika - Úvod do stavební dynamiky
 Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Počítačová podpora statických výpočtů Téma: Dynamika - Úvod do stavební dynamiky 1) Úlohy stavební dynamiky 2) Základní pojmy z fyziky 3) Základní zákony mechaniky 4) Základní dynamická zatížení Katedra
Experimentální hodnocení bezpečnosti mobilní fotbalové brány
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
Nelineární úlohy při výpočtu konstrukcí s využitím MKP
 Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Mechanika s Inventorem
 CAD Mechanika s Inventorem 1. Úvodní pojednání Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Tomáš MATOVIČ, publikace 1 Obsah přednášky: Cíl projektu 3 Význam mechanických analýz
CAD Mechanika s Inventorem 1. Úvodní pojednání Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Tomáš MATOVIČ, publikace 1 Obsah přednášky: Cíl projektu 3 Význam mechanických analýz
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Mechanika s Inventorem
 Mechanika s Inventorem 1. Úvodní pojednání CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Cíl projektu
Mechanika s Inventorem 1. Úvodní pojednání CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Cíl projektu
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 2 DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. DYNAMIKA vyšetřuje pohyb hmotných útvarů vyvolaný silami Pohyb = proces změny fyzikálních veličin
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 2 DYNAMIKA NEROTUJÍCÍCH SYSTÉMŮ Prof. Ing. Vladimír Zeman, DrSc. DYNAMIKA vyšetřuje pohyb hmotných útvarů vyvolaný silami Pohyb = proces změny fyzikálních veličin
Přednáška 1 Úvod do předmětu
 Přednáška 1 Úvod do předmětu Miroslav Lávička 1 Email: lavicka@kma.zcu.cz 1 Katedra matematiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Geometrické vidění světa KMA/GVS ak. rok 2013/2014
Přednáška 1 Úvod do předmětu Miroslav Lávička 1 Email: lavicka@kma.zcu.cz 1 Katedra matematiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Geometrické vidění světa KMA/GVS ak. rok 2013/2014
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků
 Přednáška 2 Princip metody konečných prvků") Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
Centrum kompetence automobilového průmyslu Josefa Božka - Kolokvium Božek 2014, 6. 11. 2014 Roztoky -
 WP17: Agregáty s dělením toku výkonu pro vysoce účinné mechanismy CVT/IVT, hybridní vozy a vozidlové diferenciály Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze
WP17: Agregáty s dělením toku výkonu pro vysoce účinné mechanismy CVT/IVT, hybridní vozy a vozidlové diferenciály Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
Mechanika kontinua. Mechanika elastických těles Mechanika kapalin
 Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan Vyčichl, Ph.D.
 Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Programové systémy MKP a jejich aplikace
 Programové systémy MKP a jejich aplikace Programové systémy MKP Obecné Specializované (stavební) ANSYS ABAQUS NE-XX NASTRAN NEXIS. SCIA Engineer Dlubal (RFEM apod.) ATENA Akademické CALFEM ForcePAD ANSYS
Programové systémy MKP a jejich aplikace Programové systémy MKP Obecné Specializované (stavební) ANSYS ABAQUS NE-XX NASTRAN NEXIS. SCIA Engineer Dlubal (RFEM apod.) ATENA Akademické CALFEM ForcePAD ANSYS
Řízení. Slouží k udržování nebo změně směru jízdy vozidla
 Řízení Slouží k udržování nebo změně směru jízdy vozidla ozdělení podle vztahu k nápravě 1. řízení jednotlivými koly (natáčením kol kolem rejdového čepu). řízení celou nápravou (především přívěsy) ozdělení
Řízení Slouží k udržování nebo změně směru jízdy vozidla ozdělení podle vztahu k nápravě 1. řízení jednotlivými koly (natáčením kol kolem rejdového čepu). řízení celou nápravou (především přívěsy) ozdělení
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
ÚVOD DO MODELOVÁNÍ V MECHANICE
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 1 Prof. Ing. Vladislav Laš, CSc. OBSAH 1. Cíl předmětu UMM 2. Mechanika, její rozdělení a základní pojmy 3. Historie mechaniky 4. Využití mechaniky v praxi 5.
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 1 Prof. Ing. Vladislav Laš, CSc. OBSAH 1. Cíl předmětu UMM 2. Mechanika, její rozdělení a základní pojmy 3. Historie mechaniky 4. Využití mechaniky v praxi 5.
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í
 DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ TĚŽIŠTĚ
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
OBSAH. Pasivní bezpečnost silničních motorových vozidel ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ ÚSTAV DOPRAVNÍ TECHNIKY
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ ÚSTAV DOPRAVNÍ TECHNIKY Pasivní bezpečnost silničních motorových vozidel Prof. Ing. Jan Kovanda, CSc. Ing. Jiří First 02.12. 2009 ČVUT v Praze, Fakulta
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ ÚSTAV DOPRAVNÍ TECHNIKY Pasivní bezpečnost silničních motorových vozidel Prof. Ing. Jan Kovanda, CSc. Ing. Jiří First 02.12. 2009 ČVUT v Praze, Fakulta
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
1. Úvod do předmětu Pružnost a pevnost
 p01 1 1. Úvod do předmětu Pružnost a pevnost Pružnost a pevnost (PP), jako jedna ze základních součástí mechaniky těles, patří k základním oborům strojního inženýrství. Není náhodou, že při zakládání prvních
p01 1 1. Úvod do předmětu Pružnost a pevnost Pružnost a pevnost (PP), jako jedna ze základních součástí mechaniky těles, patří k základním oborům strojního inženýrství. Není náhodou, že při zakládání prvních
Základy tvorby výpočtového modelu
 Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Základy tvorby výpočtového modelu Zpracoval: Jaroslav Beran Pracoviště: Technická univerzita v Liberci katedra textilních a jednoúčelových strojů Tento materiál vznikl jako součást projektu In-TECH 2,
Filosofie konstruování a dimenzování mechanických částí vozidel z hlediska jejich funkce a provozního zatěžování
 Filosofie konstruování a dimenzování mechanických částí vozidel z hlediska jejich funkce a provozního zatěžování doc. Ing. Miloslav Kepka, CSc. ZČU v Plzni, Fakulta strojní, Katedra konstruování strojů
Filosofie konstruování a dimenzování mechanických částí vozidel z hlediska jejich funkce a provozního zatěžování doc. Ing. Miloslav Kepka, CSc. ZČU v Plzni, Fakulta strojní, Katedra konstruování strojů
INOVACE ODBORNÉHO VZDĚLÁVÁNÍ NA STŘEDNÍCH ŠKOLÁCH ZAMĚŘENÉ NA VYUŽÍVÁNÍ ENERGETICKÝCH ZDROJŮ PRO 21. STOLETÍ A NA JEJICH DOPAD NA ŽIVOTNÍ PROSTŘEDÍ
 INOVACE ODBORNÉHO VZDĚLÁVÁNÍ NA STŘEDNÍCH ŠKOLÁCH ZAMĚŘENÉ NA VYUŽÍVÁNÍ ENERGETICKÝCH ZDROJŮ PRO 21. STOLETÍ A NA JEJICH DOPAD NA ŽIVOTNÍ PROSTŘEDÍ CZ.1.07/1.1.00/08.0010 NUMERICKÉ SIMULACE ING. KATEŘINA
INOVACE ODBORNÉHO VZDĚLÁVÁNÍ NA STŘEDNÍCH ŠKOLÁCH ZAMĚŘENÉ NA VYUŽÍVÁNÍ ENERGETICKÝCH ZDROJŮ PRO 21. STOLETÍ A NA JEJICH DOPAD NA ŽIVOTNÍ PROSTŘEDÍ CZ.1.07/1.1.00/08.0010 NUMERICKÉ SIMULACE ING. KATEŘINA
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Příklady jednoduchých technických úloh ve strojírenství a jejich řešení
 Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. Příklady jednoduchých technických úloh ve strojírenství a jejich řešení doc.
Tento materiál vznikl jako součást projektu EduCom, který je spolufinancován Evropským sociálním fondem a státním rozpočtem ČR. Příklady jednoduchých technických úloh ve strojírenství a jejich řešení doc.
Statika 1. Reakce na rovinných staticky určitých konstrukcích. Miroslav Vokáč ČVUT v Praze, Fakulta architektury.
 reálných 3. přednáška Reakce na rovinných staticky určitých konstrukcích Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 21. března 2016 Dřevěný trámový strop - Anežský klášter
reálných 3. přednáška Reakce na rovinných staticky určitých konstrukcích Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 21. března 2016 Dřevěný trámový strop - Anežský klášter
REGIONÁLNÍ TECHNOLOGICKÝ INSTITUT. Západočeská univerzita v Plzni Fakulta strojní
 REGIONÁLNÍ TECHNOLOGICKÝ INSTITUT Západočeská univerzita v Plzni Fakulta strojní Výzkumné centrum RTI Regionální technologický institut - RTI je výzkumné centrum Fakulty strojní Západočeské univerzity
REGIONÁLNÍ TECHNOLOGICKÝ INSTITUT Západočeská univerzita v Plzni Fakulta strojní Výzkumné centrum RTI Regionální technologický institut - RTI je výzkumné centrum Fakulty strojní Západočeské univerzity
Téma 12, modely podloží
 Téma 1, modely podloží Statika stavebních konstrukcí II., 3.ročník bakalářského studia Úvod Winklerův model podloží Pasternakův model podloží Pružný poloprostor Nosník na pružném Winklerově podloží, řešení
Téma 1, modely podloží Statika stavebních konstrukcí II., 3.ročník bakalářského studia Úvod Winklerův model podloží Pasternakův model podloží Pružný poloprostor Nosník na pružném Winklerově podloží, řešení
Řízení. Téma 1 VOZ 2 KVM 1
 Řízení Téma 1 VOZ 2 KVM 1 Řízení Slouží k udržování nebo změně směru jízdy vozidla Rozdělení podle vztahu k nápravě řízení jednotlivými koly (natáčením kol kolem rejdového čepu) řízení celou nápravou (především
Řízení Téma 1 VOZ 2 KVM 1 Řízení Slouží k udržování nebo změně směru jízdy vozidla Rozdělení podle vztahu k nápravě řízení jednotlivými koly (natáčením kol kolem rejdového čepu) řízení celou nápravou (především
pneumatiky a kola zavěšení kol odpružení řízení
 Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Podvozky motorových vozidel Obsah přednášky : pneumatiky a kola zavěšení kol odpružení řízení Podvozky motorových vozidel Podvozky motorových vozidel - nápravy 1. Pneumatiky a kola. Zavěšení kol 3. Odpružení
Provozní pevnost a životnost dopravní techniky. - úvod do předmětu
 Provozní pevnost a životnost dopravní techniky - úvod do předmětu doc. Ing. Miloslav Kepka, CSc. ZČU v Plzni, Fakulta strojní, Katedra konstruování strojů Provozní pevnost a životnost dopravní techniky
Provozní pevnost a životnost dopravní techniky - úvod do předmětu doc. Ing. Miloslav Kepka, CSc. ZČU v Plzni, Fakulta strojní, Katedra konstruování strojů Provozní pevnost a životnost dopravní techniky
Vliv přepravovaných nákladů na jízdní vlastnosti vozidel
 Vliv přepravovaných nákladů na jízdní vlastnosti vozidel Doc. Ing. Miroslav Tesař, CSc. Havlíčkův Brod 20.5.2010 1. Úvod 2. Definování základních pojmů 3. Stabilita vozidel 4. Stabilita proti překlopení
Vliv přepravovaných nákladů na jízdní vlastnosti vozidel Doc. Ing. Miroslav Tesař, CSc. Havlíčkův Brod 20.5.2010 1. Úvod 2. Definování základních pojmů 3. Stabilita vozidel 4. Stabilita proti překlopení
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
F - Mechanika tuhého tělesa
 F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
Únosnost kompozitních konstrukcí
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav letadlové techniky Únosnost kompozitních konstrukcí Optimalizační výpočet kompozitních táhel konstantního průřezu Technická zpráva Pořadové číslo:
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Centrum kompetence drážních vozidel (CKDV)
") Centrum kompetence drážních vozidel (CKDV) Ing. Zdeněk Malkovský 1), Doc. Ing. Miloslav Kepka, CSc. 2) 1) Ing. Zdeněk Malkovský VÚKV a.s., Praha www.vukv.cz 2) Doc. Ing. Miloslav Kepka, CSc. Západočeská
Centrum kompetence drážních vozidel (CKDV) Ing. Zdeněk Malkovský 1), Doc. Ing. Miloslav Kepka, CSc. 2) 1) Ing. Zdeněk Malkovský VÚKV a.s., Praha www.vukv.cz 2) Doc. Ing. Miloslav Kepka, CSc. Západočeská
6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
OSA. maximalizace minimalizace 1/22
 OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
OSA Systémová analýza metodika používaná k navrhování a racionalizaci systémů v podmínkách neurčitosti vyšší stupeň operační analýzy Operační analýza (výzkum) soubor metod umožňující řešit rozhodovací,
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Centrum kompetence automobilového průmyslu Josefa Božka - AutoSympo a Kolokvium Božek až , Roztoky -
 Popis obsahu balíčku WP07: Zlepšení návrhu hnacích traktů vozidel s využitím WP07: Zlepšení návrhu hnacích traktů vozidel s využitím virtuálního hnacího traktu Vedoucí konsorcia podílející se na pracovním
Popis obsahu balíčku WP07: Zlepšení návrhu hnacích traktů vozidel s využitím WP07: Zlepšení návrhu hnacích traktů vozidel s využitím virtuálního hnacího traktu Vedoucí konsorcia podílející se na pracovním
Obsah PŘEDMLUVA 11 ÚVOD 13 1 Základní pojmy a zákony teorie elektromagnetického pole 23
 Obsah PŘEDMLUVA... 11 ÚVOD... 13 0.1. Jak teoreticky řešíme elektrotechnické projekty...13 0.2. Dvojí význam pojmu pole...16 0.3. Elektromagnetické pole a technické projekty...20 1. Základní pojmy a zákony
Obsah PŘEDMLUVA... 11 ÚVOD... 13 0.1. Jak teoreticky řešíme elektrotechnické projekty...13 0.2. Dvojí význam pojmu pole...16 0.3. Elektromagnetické pole a technické projekty...20 1. Základní pojmy a zákony
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Centrum kompetence automobilového průmyslu Josefa Božka Autosympo a Kolokvium Božek 11. a , Roztoky
 Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze, zodpov. osoba Gabriela Achtenová Členové konsorcia podílející se na pracovním balíčku Vysoké učení technické v
Vedoucí konsorcia podílející se na pracovním balíčku České vysoké učení technické v Praze, zodpov. osoba Gabriela Achtenová Členové konsorcia podílející se na pracovním balíčku Vysoké učení technické v
Speciální numerické metody 4. ročník bakalářského studia. Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D.
 Speciální numerické metody 4. ročník bakalářského studia Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D. 1 Základní informace o cvičení Předmět: 228-0210/01 Speciální numerické metody
Speciální numerické metody 4. ročník bakalářského studia Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D. 1 Základní informace o cvičení Předmět: 228-0210/01 Speciální numerické metody
1. Úvod do pružnosti a pevnosti
 1. Úvod do pružnosti a pevnosti Mechanika je nejstarší vědní obor a její nedílnou součástí je nauka o pružnosti a pevnosti. Pružností nazýváme schopnost pevných těles získat po odstranění vnějších účinků
1. Úvod do pružnosti a pevnosti Mechanika je nejstarší vědní obor a její nedílnou součástí je nauka o pružnosti a pevnosti. Pružností nazýváme schopnost pevných těles získat po odstranění vnějších účinků
Mechanika úvodní přednáška
 Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
JEDNOTKY. E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze. Abstrakt
 SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
Statika soustavy těles.
 Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Fyzika - Kvinta, 1. ročník
 - Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
- Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Fyzika (FYZ) Mechanika 1. ročník, kvinta 2 hodiny Fyzikální učebna vybavená audiovizuální technikou, fyzikální pomůcky Úvod Žák vyjmenuje základní veličiny
FYZIKA I. Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Pomocný text k proniknutí do základů práce se systémem ADAMS
 Pomocný text k proniknutí do základů práce se systémem ADAMS [Text verze 1.1 2.11.2005 Michal Hajžman] 1 Úvod Tento materiál obsahuje velice stručné a subjektivně vybrané informace potřebné pro základní
Pomocný text k proniknutí do základů práce se systémem ADAMS [Text verze 1.1 2.11.2005 Michal Hajžman] 1 Úvod Tento materiál obsahuje velice stručné a subjektivně vybrané informace potřebné pro základní
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Katedra geotechniky a podzemního stavitelství
 Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Metoda okrajových prvků (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Metoda okrajových prvků (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
NESTABILITY VYBRANÝCH SYSTÉMŮ. Úvod. Vzpěr prutu. Petr Frantík 1
 NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
NESTABILITY VYBRANÝCH SYSTÉMŮ Petr Frantík 1 Úvod Úloha pokritického vzpěru přímého prutu je řešena dynamickou metodou. Prut se statickým zatížením je modelován jako nelineární disipativní dynamický systém.
Magisterský studijní program
 Magisterský studijní program M0 Strojní inženýrství. rok studia Matematika IA (matematická analýza) [MA-P] Úvod do strojírenství [US-P] Programování I [PRO] Konstruktivní geometrie [KGE-P] Obecná chemie
Magisterský studijní program M0 Strojní inženýrství. rok studia Matematika IA (matematická analýza) [MA-P] Úvod do strojírenství [US-P] Programování I [PRO] Konstruktivní geometrie [KGE-P] Obecná chemie
Řešené granty a projekty za rok 1996
 Řešené granty a projekty za rok 1996 GAČR Komplexní projekt (č. 106/96/K245) Nositel grantu Prof. Ing. Jindřich Musil, DrSc. Název Tvrdé a supertvrdé povlaky vytvořené nekonvenčními plazmovými procesy
Řešené granty a projekty za rok 1996 GAČR Komplexní projekt (č. 106/96/K245) Nositel grantu Prof. Ing. Jindřich Musil, DrSc. Název Tvrdé a supertvrdé povlaky vytvořené nekonvenčními plazmovými procesy