Kinematika robotických systémů
|
|
|
- Jarmila Říhová
- před 5 lety
- Počet zobrazení:
Transkript
1 Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1
2 Obsah Postup modelování robotických systémů Strukturní analýza robotů Maticový popis pohybu tělesa Metoda základních matic Metoda řešení kinematických smyček Metody numerického řešení kinematických vazeb Metody analytického řešení kinematických vazeb 2
3 Postup modelování robotických systémů Model je základ návrhu a systému řízení robota Modelování = vývojový proces mechanického modelu Mechanický model je dále transformován na matematický a/nebo simualční model pro další zkoumání (analýza, simulace, syntéza, návrh řízení, systém řízení, kalibrace, diagnostika atd.) Model = konceptuální model = fyzikální (mechanický) model = matematický model = simulační model Proces modelování je velmi náročný, protože Užívá znalosti a zkušenosti mnoha vědních oborů Nelze ho popsat úplným systémem teorémů a pravidel a systematickým postupem Musí se naučit vykonáváním (learning by doing) 3
4 Postup modelování robotických systémů Životní cyklus vývoje simulačního modelu Reálný svět Konceptuální svět Modelový svět Simulační (matematický) svět Konceptualizace Modelování Implementace Řešení Objekt reálného světa Reálný systém Otázka Objekt konceptuálního světa Konceptuální model Model okolí Objekt modelového světa Fyzikální model Vstup modelu Objekt simulačního (matematického) světa Simulační (matematický) model Metoda řešení Testovací vstup Simulační (matematický) model s metodou řešení Vstup modelu Odpověď Cíl modelování Výstup modelu Testovací výstup Výstup modelu Interpretace řešení 4
5 Postup modelování robotických systémů Ideální objekty Základ modelování je transformace reálných objektů (strojů, technických systémů, např. robotických systémů) na fiktivní abstraktní objekty s idealizovanými vlastnostmi = tzv. ideální objekty Ideální objekty hmotný bod, tuhé těleso, lineární pružina, pružné těleso, ideální plyn, elektrická kapacita Věda umí formulovat teorémy jen o ideálních objektech, věda přímo nepředpovídá nic o reálných objektech Vlastnosti reálných objektů jsou pouze do jistého rozsahu podobné vlastnostem ideálních objektů Věda (inženýrský výpočet) je platná pro reálné objekty podle stupně shody vlastností reálného a ideálního objektu (idealizovaný model) Proto je modelování absolutně základní pro každého inženýra. Modelování je základ každého řešení inženýrského problému. Důležitost modelování roste plynule s používáním počítačů 5
6 Postup modelování robotických systémů Kroky vývoje simulačního modelu 1. step - the analysis of the real world object (real, hypothesized) within certain experimental frame in order to answer some question 2. step the conceptual task (conceptualization) where the real world object is transformed into conceptual world object the considered components are selected 3. step the physical modelling where the conceptual world object is transformed into physical world object each component is replaced by one or more ideal objects 4. step the simulation model assembly where the physical world object is transformed into simulation world object simulation model implementation and simulation experiments replacements of model by a computer-executable set of instructions from ideal objects into mathematical equations (model) plus solving procedure and into computer code 6
7 Postup modelování robotických systémů Iterační proces vývoje modelu Reálný svět Konceptuální svět Modelový svět Simulační svět 7


8 Postup modelování robotických systémů Příklad 8
9 Postup modelování robotických systémů Příklad 9
10 Postup modelování robotických systémů Příklad 10

11 Postup modelování robotických systémů Příklad 11
12 Strukturní analýza robotů Robotické systémy jsou modelovány jako tzv. soustavy mnoha těles (multibody system) Základní ideální objekty jsou: těleso, kinematická dvojice, síla Kinematická analýza vytváří kinematický model a pracuje s ideálními objekty: dokonale tuhé těleso (člen) a kinematická dvojice Kinematický model vytváříme metodou kinematických řetězců 12
13 Strukturní analýza robotů Kinematický řetězec je tvořen několika tělesy (členy) spojenými (vázanými) kinematickými dvojicemi (KD) (vazbami, klouby) Kinematický řetězec je spojení několika těles KD Kinematický model znázorňujeme kinematickým schématem nebo přidruženým grafem Kinematické schéma: těleso=hrana, KD=uzel Přidružený graf: těleso=uzel, KD=hrana
14 Strukturní analýza robotů 2 1 φ 1 s 2 1 s 2 φ 2 φ 3 1 φ 1 φ 2 14
15 Strukturní analýza robotů Rozlišujeme Těleso stupně n = těleso (člen) spojený s okolními tělesy n KD (unární, binární, ternární) Jednoduchý /složený kinematický řetězec = všechna tělesa jsou/nejsou jen binární nebo unární Kinematický řetezec otevřený/uzavřený, pokud obsahuje/neobsahuje jeho graf smyčku Smíšená terminologie - Mixed notation Jednoduchý /složený otevřený/uzavřený - smíšený 15
16 Strukturní analýza robotů y O 12 1 a) b) c) d) e) 2 12 E O 23 3 O x rot. k.d. O 12 rot. k.d. O rot. k.d. O předepsaný pohyb Mechanismus vznikne z kinematického řetězce položením jednoho členu rámem 16
17 Strukturní analýza robotů s 14 O 23 O O rot. KJ O rot. KJ O 12 rot. KJ O tran. KJ 2 3 L y O rot. KJ O 12 E O 23 rot. KJ O rot. KJ O 34 3 O 34 4 Prescribed motion 4 14 x loop loop loop loop
18 Strukturní analýza robotů Vedle KD je pro strukturní analýzu zvláště robotů zavést také nový druh kinematické dvojice v podobě předepsaného pohybu mezi tělesy soustavy Klíčové je určení počtu stupňů volnosti a počtu kinematických smyček Je-li u počet členů včetně rámu, w j počet KD třídy j, d počet všech KD, l počet nezávislých smyček, m počet předepsaných pohybů, pak d 5 w j j 1 18
19 Strukturní analýza robotů Počet nezávislých smyček určíme z analýzy přidruženého grafu. Je to rozdíl mezi počtem hran a počtem hran kostry tohoto grafu Souřadnice jsou parametry popisující vzájemnou polohu těles Nejmenší počet souřadnic potřebných jednoznačné určení polohy soustavy těles je roven počtu stupňů volnosti (DOF) KD, která odnímá j stupňů volnosti, je třídy j. Tato KD má (6-j) stupňů volnosti a j reakčních sil. 19
20 Strukturní analýza robotů Souřadnice dělíme na nezávislé a závislé Závislé souřadnice jsou vzájemně vázány nějakými vztahy kinematickými vazbami Nezávislé souřadnice popisující pohyb v KD nazýváme relativní souřadnice Každá jednoduchá kinematická smyčka s n stupni volnosti má n nezávislých a 6 závislých souřadnic mezi relativními souřadnicemi KD. Mechanický systém s n stupni volnosti a l nezávislými kinematickými smyčkami má n nezávislých a 6l závislých souřadnic mezi relativními souřadnicemi KD. 20
21 Strukturní analýza robotů Druhy souřadnic Relativní souřadnice nezávislé souřadnice KD 1 2 φ 1 s 2 21
22 Strukturní analýza robotů Druhy souřadnic Kartézské (absolutní, fyzikální) souřadnice souřadnice popisující polohu příslušného tělesa vzhledem k rámu x,y,z (kartézskými) souřadnicemi referenčního bodu tělesa (často těžiště), který je počátkem kartézského souřadnicového systému pevně spojeného s tělesem, a souřadnicemi popisujícími orientaci tohoto souřadnicového systému vůči souřadnicovému systému rámu (Eulerovy úhly, Cardanovy úhly, kvaternióny) [x,y] [x,y,z] + Cardanovy úhly x, y, z 22
23 Strukturní analýza robotů Druhy souřadnic Přirozené souřadnice kartézské souřadnice význačných bodů a jednotkových vektorů těles soustavy. Význačné body jsou obvykle středy KD, body na jejich osách. Význačné jednotkové vektory jsou obvykle směry os KD. Výhoda = sdílení význačných bodů a jednotkových vektorů přirozeně popisuje spojení těles příslušnými KD. Vazbové podmínky jsou podmínky tuhosti těles. 23
24 Strukturní analýza robotů Druhy souřadnic 24
25 Strukturní analýza robotů Druhy souřadnic 25
26 Strukturní analýza robotů Příklad x i, y i, z i, xi, yi, zi 26
27 Strukturní analýza robotů Pozor: existují tzv. singulární případy, kdy strukturní vzorce na základě teorie grafů neplatí Počet stupňů volnosti je pak dán Kde φ je Jacobiho matice kinematických vazeb f včetně předepsaných pohybů se souřadnicemi s 27






28 Postup modelování robotických systémů Prolog Robotické systémy Průmyslové roboty sériové struktury Průmyslové roboty paralelní struktury Mobilní roboty Antropomorfické, humanoidní roboty 28
29 Maticový popis pohybu tělesa z 1 z 2 L Osy souřadnicového systému x 1 O 1 1 r 1L x 2 2 r 2L O 2 y 2 y 1 a r bl Počátek souřadnicového systému Zkoumaný bod Pohyb tělesa jako transformace mezi souřadnicovými systémy 29
30 Maticový popis pohybu tělesa Souřadnicové systémy se shodným počátkem z 1 L z 2 1 r 1L = 2 r 2L k 2 i 1 k 1 i 2 j 1 j 2 y 2 y 1 x 1 x 2 O 1 =O 2 30
31 Maticový popis pohybu tělesa Transformace jednotkových vektorů 31
32 Maticový popis pohybu tělesa Matice směrových kosinů 32
33 Maticový popis pohybu tělesa Maticový výpočet násobení vektorů 33
34 Maticový popis pohybu tělesa Matice úhlových rychlostí 34
35 Maticový popis pohybu tělesa Matice úhlových zrychlení 35
36 Maticový popis pohybu tělesa Souřadnicové systémy s paralelními osami z 1 z 2 L 1 r 1L 2 r 2L u 12 O 2 y 2 O 1 x 2 y 1 x 1 36
37 Maticový popis pohybu tělesa Obecné souřadnicové systémy z 1 z 2 L 2 r 2L 1 r 1L O 2 y 2 x 2 O 1 y 1 x 1 37

38 Maticový popis pohybu tělesa Transformační matice 38
39 Maticový popis pohybu tělesa Pohyb jako časově proměnná transformace z 1 z 2 L 2 r 2L 1 r 1L O 2 y 2 1 r 1O2 x 2 O 1 y 1 x 1 39
40 Maticový popis pohybu tělesa Rychlosti 40
41 Maticový popis pohybu tělesa Matice rychlostí 41
42 Maticový popis pohybu tělesa Zrychlení 42
43 Maticový popis pohybu tělesa Matice zrychlení 43

44 Metoda základních matic Současné (složené) pohyby L z 3 z 1 z 3 2 r y 3 3L O 3 1 r 1L 2 r 2L x 3 O 2 y 2 x 2 O 1 y 1 x 1 44
45 Maticový popis pohybu tělesa Současné (složené) pohyby 45
46 Metoda základních matic Základní pohyby O 2 x 1 =x 2 z 1 z 2 x O 1 O 1 y 1 y 2 x 1 x 2 z 1 z 2 y O 2 y 1 =y 2 x 2 x 1 z 1 =z 2 z O 2 O 1 y 2 y 1 z 2 z 1 z 2 z 1 z 1 =z 2 φ x O 1 =O 2 φ x y 1 y 2 x 1 φ y φ y O 1 =O 2 y 1 =y 2 x 1 φ z O 1 =O 2 φ z y 1 y 2 x 1 =x 2 x 2 x 2 46
47 Metoda základních matic 3 posuvy podél os x,y,z O 2 z 2 x z 1 O 1 y 2 y 1 T ( x Z1 ) x 1 =x 2 O 1 z 1 z 2 y O 2 T ( y Z 2 ) x 1 x 2 y 1 =y 2 x 2 z 1 =z 2 z O 2 O 1 y 2 y 1 T ( z Z 3 ) x 1 47
48 Metoda základních matic 3 rotace kolem os x,y,z z 2 z 1 φ x O 1 =O 2 y 2 T Z ) ( 4 x φ x y 1 x 1 =x 2 z 2 z 1 φ y O 1 =O 2 T Z ) ( 5 y x 1 φ y y 1 =y 2 x 2 z 1 =z 2 O 1 =O 2 y 2 T Z ) ( 6 z x 1 φ z φ z y 1 x 2 48
49 Metoda základních matic Odvození rotace y 1 y 2 y 1L L x 2 y 2L x 2L O z x 1L x 1 49
50 Metoda základních matic Příklad: rovinný robot x 4 y 4 4 L y 1 y 3 l 2 3 d y 2 3 x 3 l s 1 2 x 1 =x 2 50
51 Metoda základních matic Příklad: prostorový robot 51
52 Metoda základních matic Základní maticové diferenciální operátory 52
53 Metoda základních matic Základní maticové diferenciální operátory 53
54 Metoda základních matic Základní maticové diferenciální operátory 54
55 Metoda základních matic Základní maticové diferenciální operátory 55
56 Metoda základních matic Základní maticové diferenciální operátory 56
57 Metoda základních matic Základní maticové diferenciální operátory 57
58 Metoda základních matic Inverze, komutativnost, derivace 58


59 Metoda základních matic Příklad: rychlosti prostorového robota 59

60 Metoda základních matic Algebraizace řešení pro bod Řešení kinematického popisu otevřeného řetězce je převedeno na násobení základních matic a jejich maticových diferenciálních operátorů Pro bod M: 60
61 Pro těleso S: Metoda základních matic Algebraizace řešení pro těleso n=s M
62 Metoda základních matic Příklad: Puma

63 Metoda základních matic Příklad: Puma

64 Metoda základních matic Příklad: Puma
65 Metoda základních matic Popis pohybu KD Tělesa a a b jsou spojena KD s osou o ab z a x b z 1 O b O a y a y b o ab =z b x a x 1 O 1 y 1 Na tělesech a a b jsou zvoleny dva souřadnicové systémy tak, že je z b =o ab Dále je zvolen souřadnicový systém O 0 x 0 y 0 z 0, který je pevně spojen s tělesem a a je na začátku pohybu shodný se souřadnicovým systémem O b x b y b z b 65
66 Metoda základních matic Popis pohybu KD Pohyb v KD je popsán celý pohyb pohyb relativní pohyb z a do b z a do 0 v KD Z O a x a y a z a do O 0 x 0 y 0 z 0 5 pohyby (bez rotace kolem o ab ) 66
67 Rotační KD Metoda základních matic Popis pohybu KD 67
68 Metoda základních matic Popis pohybu KD Posuvná KD 68
69 Metoda základních matic Popis pohybu KD Válcová KD Šroubová KD 69
70 Metoda základních matic Popis pohybu KD Sférická KD Eulerovy úhly 70
71 Metoda základních matic Popis pohybu KD Eulerova kinematická rovnice 71
72 Metoda základních matic Popis pohybu KD Sférická KD Cardanovy úhly 72
73 Metoda základních matic Popis pohybu KD Výhodný popis pro linearizaci Eulerova kinematická rovnice 73
74 Metoda základních matic Popis pohybu KD Sférická KD Roll, pitch, yaw z 1 o x 1 O 1 y 1 74
75 Metoda základních matic Popis pohybu KD Sférická KD Eulerovy parametry Eulerovy parametry jsou prvky normovaného kvaterniónu 75
76 Metoda základních matic Popis pohybu KD Kvaternión je součet skaláru a vektoru Je to zobecnění komplexních čísel do prostoru Konjugovaný kvaternión Norma kvaterniónu Norma Eulerových paranmetrůje 1 Eulerovy parametry jsou vázány vazbou Kvaterniónové násobení je definováno Umožňuje vyjádřit rotaci v prostoru 76
77 Metoda základních matic Popis pohybu KD Od Eulerových parametrů k matici směrových kosinů Od matice směrových kosinů k Eulerovým parametrům 77
78 Metoda základních matic Popis pohybu KD 1. Nechť k je rovno indexu prvku diagonály matice B s největší absolutní hodnotou, k=0,1,2,3. 2. Vypočteme 3. Nechť 4. Výsledek je 78
79 Metoda základních matic Popis pohybu KD Úhlové rychlosti z Eulerových parametrů 79
80 Metoda základních matic Popis pohybu KD Zrychlení z Eulerových parametrů 80
81 Plochá KD Metoda základních matic Popis pohybu KD 81
82 Metoda řešení kinematických smyček Otevřený kinematický řetězec je obvykle popsán nezávislými (relativními) souřadnicemi. Kinematická smyčka obsahuje závislé (relativní) souřadnice. Metody pro sestavení rovnic pro určení závislých souřadnic. Metoda uzavřené smyčky Metoda rozpojené smyčky řezem Metoda rozpojené smyčky vyjmutím tělesa Metoda přirozených souřadnic Metoda kartézských souřadnic metoda kompartmentů 82
83 Metoda řešení kinematických smyček 1. Metoda uzavřené smyčky Na vybraném tělese smyčky (nemusí být rámem) zvolíme souřadnicový systém. Kinematická transfor-mace z tohoto souřadnicového systému skrze celou smyčku do toho samého souřadnicového systému je popsána. Výsledek je identita Jinou variantu dostaneme po vynásobení obou stran 83



84 Metoda řešení kinematických smyček 1. Metoda uzavřené smyčky V obou případech sestavíme 12 nelineárních rovnic a 4 identity. Mezi nimi je pouze 6 nezávislých rovnic vzhledem k identitám v matici směrových kosinů. 84
85 Metoda řešení kinematických smyček Příklad: 1. Metoda uzavřené smyčky Univerzální kloub 85
86 Metoda řešení kinematických smyček Příklad: 1. Metoda uzavřené smyčky 86
87 Metoda řešení kinematických smyček Příklad: 1. Metoda uzavřené smyčky 87
88 Metoda řešení kinematických smyček Příklad: 1. Metoda uzavřené smyčky 88
89 1 Metoda řešení kinematických smyček 2. Metoda rozpojené smyčky řezem Počet neznámých a počet rovnic může být snížen. Kinematická smyčka je rozpojena řezem v některé KD a jsou sestaveny podmínky uzavřenosti smyčky. Vzniklé rovnice neobsahují relativní souřadnice v řezu smyčky. Sférická KD Podmínka je rovnost rádiusvektorů středu sférické KD na tělese k a k+1. Výsledek jsou 3 rovnice. Neobsahují 3 relativní souřadnice sférické KD. 89
90 Metoda řešení kinematických smyček 2. Metoda rozpojené smyčky řezem Rotační KD Podmínka je rovnost rádiusvektorů středů na ose rotační KD na tělese k=m a k+1=n a rovnost jednotkových vektorů osy rotační KD. 3 rovnice (nezávislé) 3 rovnice (2 nezávislé) Výsledek je 6 rovnic, 5 z nich je nezávislých. Neobsahují relativní souřadnici rotační KD. 90
91 Metoda řešení kinematických smyček 2. Metoda rozpojené smyčky řezem Posuvná KD Podmínka je rovnost jednotkových vektorů osy, kolinearita BD a jednotkového vektoru osy a konstantní úhel AB, DF 3 rovnice (2 nezávislé) 3 rovnice (2 nezávislé) 1 rovnice (nezávislá) Výsledek je 7 rovnic, 5 z nich je nezávislých. Neobsahují relativní souřadnici posuvné KD. 91
92 Metoda řešení kinematických smyček 2. Metoda rozpojené smyčky řezem Válcová KD Podmínka je rovnost jednotkových vektorů osy a kolinearita AB a jednotlového vektoru osy. 3 rovnice (2 nezávislé) 3 rovnice (2 nezávislé) Výsledek je 6 rovnic, 4 z nich je nezávislých. Neobsahují relativní souřadnice válcové KD. 92
93 Metoda řešení kinematických smyček 2. Metoda rozpojené smyčky řezem Plochá KD Podmínka je rovnost jednotkového vektoru kolmého na rovinu a kolmost AB a jednotkového vektoru kolmého k rovině. 3 rovnice (2 nezávislé) 1 rovnice (nezávislá) Výsledek je 4 rovnic, 3 z nich jsou nezávislé. Neobsahují relativní souřadnice ploché KD. 93
94 Metoda řešení kinematických smyček 3. Metoda rozpojené smyčky vyjmutím tělesa 1 Počet neznámých a počet rovnic může být dále snížen. Kinematická smyčka je rozpojena dvěma řezy ve dvou KD na jednom tělese a těleso je vyjmuto a jsou sestaveny podmínky uzavřenosti smyčky. Vzniklé rovnice neobsahují relativní souřadnice dvou KD v řezech smyčky. 94
95 Metoda řešení kinematických smyček 3. Metoda rozpojené smyčky vyjmutím S 1 S 2 1 Sférická sférická KD Podmínka je rovnost vzdálenosti středů sférických KD na tělese. Výsledek je jen 1 rovnice. Neobsahuj 6 relativních souřadnic sférických KD. POZOR: Těleso se může volně otáčet kolem S1S2. 95
96 Metoda řešení kinematických smyček 3. Metoda rozpojené smyčky vyjmutím Sférická rotační KD Podmínka je vzdálenost středu sférické KD od osy rotační KD. Výsledek jsou 2 rovnice. Neobsahují 4 relativní souřadnice sférické a rotační KD. 96
97 Metoda řešení kinematických smyček 3. Metoda rozpojené smyčky vyjmutím Rotační rotační KD Podmínka je vzdálenost a úhel mimoběžných os rotačních KD. Výsledek jsou 4 rovnice. Neobsahují 2 relativní souřadnice rotačních KD. 97

98 Metoda řešení kinematických smyček Příklad: 3. Metoda rozpojené smyčky vyjmutím RRSRR mechanismus 98
99 Metoda řešení kinematických smyček 3. Metoda přirozených souřadnic Přirozené souřadnice kartézské souřadnice význačných bodů a jednotkových vektorů těles soustavy. Význačné body jsou obvykle středy KD, body na jejich osách. Význačné jednotkové vektory jsou obvykle směry os KD. Výhoda = sdílení význačných bodů a jednotkových vektorů přirozeně popisuje spojení těles příslušnými KD. Vazbové podmínky jsou podmínky tuhosti těles. 99
100 Metoda řešení kinematických smyček 3. Metoda přirozených souřadnic Sférická KD je popsána sdílením souřadnic středů KD. Rotační KD je popsána sdílením bodu na ose a jednotkového vektoru osy. Válcová KD je popsána sdílením jednotkových vektorů a AB//u. Posuvná KD je popsána sdílením jednotkových vektorů, AB//u a konstantní úhel AC, BD. 100
101 Podmínky tuhosti tělesa Metoda řešení kinematických smyček 3. Metoda přirozených souřadnic 101
102 Metoda řešení kinematických smyček Příklad: 3. Metoda přirozených souřadnic RRSRR mechanismus 102
103 Metoda řešení kinematických smyček 5. Metoda kartézských souřadnic Kartézské (fyzikální) souřadnice každé těleso je popsáno kartézskými souřadnicemi (souřadnice počátků lokálních souřadnicových systémů) a jejich orientace (např. Cardanovy úhly) Vazbové podmínky jsou popsány pro spojení se sousedními tělesy metodou rozpojení smyčky T 1k = T x (x k )T y (y k ) T z (z k )T x ( xk )T y ( yk ) T z ( yk ) 1 r 1L = T 1k k r kl 103
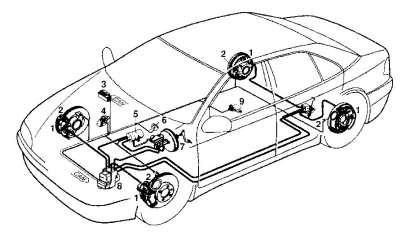
104 Metoda řešení kinematických smyček Příklad: 5. Metoda kartézských souřadnic Pětibodový závěs kola auta [x y z] T, x, y z Cardanovy úhly Virtuální smyčka A i B i =l i 6 souřadnic 5 skalárních vazbových podmínek 6-5=1 DOF 104
105 Metoda řešení kinematických smyček Příklad: 5. Metoda kartézských souřadnic Hexapod x, y, z, x, y, z, l i = l i (t), i=1,2,,6 A i B i =l i 12 souřadnic 6 skalárních vazbových podmínek 12-6=6 DOF 105
106 Metody numerického řešení kinematických vazeb Robotický systém je popsán souřadnicemi Ty lze rozdělit na nezávislé souřadnice a závislé souřadnice Z vazbových podmínek vypočteme závislé souřadnice v závislosti na nezávislých 106
107 Metody numerického řešení kinematických vazeb úloha polohy 1. problém nelinearita Jde obecně o systém nelineárních transcendentních rovnic Analytické řešení je možné jen ve zvláštních případech Numerické řešení je nutné obecně pomocí modifikované Newtonovy metody 107
108 Metody numerického řešení kinematických vazeb úloha polohy Je-li k-tá iterace Vazbové podmínky jsou rozvinuty do Taylorovy řady kolem k-té iterace kde je Jacobiho matice Získáme soustavu lineárních algebraických rovnic pro neznámé 108
109 Metody numerického řešení kinematických vazeb úloha polohy Řešením Iterace klasické Newtonovy metody je Velká nevýhoda klasické Newtonovy metody je, že konverguje jen v okolí řešení. Proto je užita modifikovaná Newtonova metoda kde skalární parametr je určen z minimalizace 109
110 Metody numerického řešení kinematických vazeb úloha polohy Algoritmus While do end Konec iterace 110
111 Metody numerického řešení kinematických vazeb úloha polohy Platí silná věta o konveregenci Věta: V omezené oblasti nechť funkce má stejnoměrně omezené první a druhé parciální derivace. Nechť v této oblasti je zobrazení jednojednoznačné a a nechť existuje bod (je jediný) tak, že. Pak modifikovaná Newtonova metoda konverguje z libovolného odhadu, tj. pro. z* R R R Dvě řešení Problém oscilací singulární Problém konvergence 111
112 Metody numerického řešení kinematických vazeb úloha polohy 2. problém přeurčené rovnice obecně obdélníková matice Řešitelnost a řešení A x b r A =rank(a) m = r B =rank([a,b]) n Frobeniova věta Systém LAE je řešitelný právě tehdy když r A =r B. Jednoznačné řešení existuje právě tehdy když r A =r B =n. 112

113 Metody numerického řešení kinematických vazeb úloha polohy Physical interpretation 113
114 Metody numerického řešení kinematických vazeb úloha rychlosti pro řešení polohy Časovou derivací Shodná matice soustavy jako pro úlohu polohy 114
115 Metody numerického řešení kinematických vazeb úloha zrychlení Další časovou derivací Opět shodná matice soustavy jako pro úlohu polohy Matice soustavy a její inverze je pro všechny úlohy shodná, tedy shodné vlastnosti všech úloh 115
116 Metody numerického řešení kinematických vazeb Obecné řešení rozkladem SVD Ortonormální matice popisující rotaci souřadnicových systémů 116
117 Metody numerického řešení kinematických vazeb Diagonální matice reprezentuje hodnost matice d i S= rank(a)=r 117
118 Metody numerického řešení kinematických vazeb 118
119 Metody numerického řešení kinematických vazeb Fyzikální interpretace - počet stupňů volnosti Počet vazeb Hodnost Jacobiho matice Vztah občas selže 119
120 Metody numerického řešení kinematických vazeb Existují singulární polohy mechanismu, kde je náhlý nárůst počtu stupňů volnosti. Mechanismus regulární singulární v nějaké poloze trvale singulární Maticová metoda poskytuje 12 rovnic, jen 6 z nich je nezávislých Které prvky (rovnice) jsou opravdu nezávislé, je určeno numericky je určeno nejlepší regulární jádro 120
121 Metody numerického řešení kinematických vazeb příklad Turbula 121
122 Metody numerického řešení kinematických vazeb příklad Turbula 122

123 Metody numerického řešení kinematických vazeb příklad Turbula 123
124 Metody numerického řešení kinematických vazeb příklad Turbula 124
125 Metody numerického řešení kinematických vazeb Kinematické problémy mechanismů Mechanismus je popsán souřadnicemi s Některé z nich jsou pohony nebo dány nezávislé souřadnice q Kinematické problémy mechanismů spočívají v určení závislých souřadnic z Robotika zavedla terminologii: Robot má pohony s hnacími souřadnicemi a koncový efektor G popsaný souřadnicemi s pohybem Dopředný kinematický problém určit ze známých souřadnic pohonů neznámé souřadnice polohy koncového efektoru Inverzní kinematický problém určit ze známé polohy koncového efektoru neznámé souřadnice pohonů 125
126 Metody numerického řešení kinematických vazeb Koncový efektor G G G 2 pohony n=s pohony 1 126
127 Metody numerického řešení kinematických vazeb Dopředný (přímý) kinematický problém pro sériové řetězce žádné smyčky, žádné vazby použití relativních souřadnic a přímého výpočtu Dopředný kinematický problém pro soustavy se smyčkami vazby řešeny nejdříve a pak přímý výpočet polohy Inverzní kinematický problém podmínka předepsaného pohybu je další vazbou 127
128 Metody numerického řešení kinematických vazeb mechanismus 2 pohony G pohyb M pohony G M 1 Některé kinematické problémy lze řešit analyticky. Dopředný kinematický problém pro sériové roboty je snadný. Inverzní kinematický problém pro sériové roboty je obtížný. Dopředný kinematický problém pro paralelní roboty je obtížný. Inverzní kinematický problém pro paralelní roboty je snadný. 128
129 Metody analytického řešení kinematických vazeb Analytické řešení je možné jen tehdy, když lze soustavu rovnic rozdělit na dvě soustavy rovnic se třemi neznámými To je možné v těchto strukturních případech: 1) tři posuvné KD 2) tři rotační KD s protínajícími se osami (sférická KD) 129
130 Metody analytického řešení kinematických vazeb 3) ekvivalent ploché KD (tři paralelní osy rotace po sobě, dvě paralelní osy rotace a na ně kolmá osa posuvu, dva posuvy a na ně kolmá osa rotace) 4) dva posuvy a dvě paralelní osy rotace 130
131 Metody analytického řešení kinematických vazeb - příklad 131
Kinematika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
Dynamika robotických systémů
 Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Dynamika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup sestavování
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Dynamika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Dynamika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 25.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanismy - klasifikace, strukturální analýza, vazby Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Mechanismy - úvod Mechanismus je soustava těles, spojených
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách
 Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
Státní závěrečná zkouška z oboru Matematika a její použití v přírodních vědách Ústní zkouška z oboru Náročnost zkoušky je podtržena její ústní formou a komisionálním charakterem. Předmětem bakalářské zkoušky
úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů,
 Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Pohyb mechanismu Obsah přednášky : úvod do teorie mechanismů, klasifikace mechanismů vazby, typy mechanismů, Doba studia : asi,5 hodiny Cíl přednášky : uvést studenty do problematiky mechanismů, seznámit
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
6. Vektorový počet Studijní text. 6. Vektorový počet
 6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Mechanismy - úvod. Aplikovaná mechanika, 8. přednáška
 Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Mechanismy - úvod Mechanismus je soustava těles, spojených navzájem vazbami. Mechanismus slouží k přenosu sil a k transformaci pohybu. posuv rotace Mechanismy - úvod Základní pojmy. člen mechanismu rám
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Matematika B101MA1, B101MA2
 Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
3. Obecný rovinný pohyb tělesa
 . Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
. Obecný rovinný pohyb tělesa Při obecném rovinném pohybu tělesa leží dráhy jeho jednotlivých bodů v navzájem rovnoběžných rovinách. Těmito dráhami jsou obecné rovinné křivky. Všechny body ležící na téže
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
ANALYTICKÁ GEOMETRIE V ROVINĚ
 ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
příkladů do cvičení. V textu se objeví i pár detailů, které jsem nestihl (na které jsem zapomněl) a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.
 a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.") Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Diskrétní řešení vzpěru prutu
 1 z 5 Diskrétní řešení vzpěru prutu Discrete solution of beam buckling Petr Frantík Abstract Here is described discrete method for solution of beam buckling. The beam is divided into a number of tough
1 z 5 Diskrétní řešení vzpěru prutu Discrete solution of beam buckling Petr Frantík Abstract Here is described discrete method for solution of beam buckling. The beam is divided into a number of tough
maticeteorie 1. Matice A je typu 2 4, matice B je typu 4 3. Jakých rozměrů musí být matice X, aby se dala provést
 Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Co je obsahem numerických metod?
 Numerické metody Úvod Úvod Co je obsahem numerických metod? Numerické metody slouží k přibližnému výpočtu věcí, které se přesně vypočítat bud nedají vůbec, nebo by byl výpočet neúměrně pracný. Obsahem
Numerické metody Úvod Úvod Co je obsahem numerických metod? Numerické metody slouží k přibližnému výpočtu věcí, které se přesně vypočítat bud nedají vůbec, nebo by byl výpočet neúměrně pracný. Obsahem
Dá se ukázat, že vzdálenost dvou bodů má tyto vlastnosti: 2.2 Vektor, souřadnice vektoru a algebraické operace s vektory
 Vektorový počet.1 Eklidovský prostor E 3 Eklidovský prostor E 3 je prostor spořádaných trojic (tj. bodů), v němž je definována vzdálenost dvo jeho bodů A, B (značíme ji AB ). Vzdálenost bodů A = [a 1,
Vektorový počet.1 Eklidovský prostor E 3 Eklidovský prostor E 3 je prostor spořádaných trojic (tj. bodů), v němž je definována vzdálenost dvo jeho bodů A, B (značíme ji AB ). Vzdálenost bodů A = [a 1,
Požadavky ke zkoušce
 Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Maturitní otázky z předmětu MATEMATIKA
 Wichterlovo gymnázium, Ostrava-Poruba, příspěvková organizace Maturitní otázky z předmětu MATEMATIKA 1. Výrazy a jejich úpravy vzorce (a+b)2,(a+b)3,a2-b2,a3+b3, dělení mnohočlenů, mocniny, odmocniny, vlastnosti
Wichterlovo gymnázium, Ostrava-Poruba, příspěvková organizace Maturitní otázky z předmětu MATEMATIKA 1. Výrazy a jejich úpravy vzorce (a+b)2,(a+b)3,a2-b2,a3+b3, dělení mnohočlenů, mocniny, odmocniny, vlastnosti
a vlastních vektorů Příklad: Stanovte taková čísla λ, pro která má homogenní soustava Av = λv nenulové (A λ i I) v = 0.
 v = 0.") Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Úlohy nejmenších čtverců
 Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Ing. Oldřich Šámal. Technická mechanika. kinematika
 Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
Ing. Oldřich Šámal Technická mechanika kinematika Praha 018 Obsah 5 OBSAH Přehled veličin A JEJICH JEDNOTEK... 6 1 ÚVOD DO KINEMATIKY... 8 Kontrolní otázky... 8 Kinematika bodu... 9.1 Hmotný bod, základní
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Analytická geometrie lineárních útvarů
 ) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
ÚVOD DO MODELOVÁNÍ V MECHANICE DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ
 ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
ÚVOD DO MODELOVÁNÍ V MECHANICE Přednáška č. 4 DYNAMIKA VÁZANÝCH MECHANICKÝCH SYSTÉMŮ Ing. Michal Hajžman, Ph.D. Harmonogram UMM Úvod do modelování v mechanice (UMM) 1) Úvodní přednáška (Dr. Hajžman) 2)
Otázky k ústní zkoušce, přehled témat A. Číselné řady
 Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
Gymnázium Česká a Olympijských nadějí, České Budějovice, Česká 64, 37021
 Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
Maturitní témata MATEMATIKA 1. Funkce a jejich základní vlastnosti. Definice funkce, def. obor a obor hodnot funkce, funkce sudá, lichá, monotónnost funkce, funkce omezená, lokální a globální extrémy funkce,
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
JEDNOTKY. E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze. Abstrakt
 SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
SIMULAČNÍ MODEL KLIKOVÉ HŘÍDELE KOGENERAČNÍ JEDNOTKY E. Thöndel, Ing. Katedra mechaniky a materiálů, FEL ČVUT v Praze Abstrakt Crankshaft is a part of commonly produced heat engines. It is used for converting
Maturitní okruhy z matematiky - školní rok 2007/2008
 Maturitní okruhy z matematiky - školní rok 2007/2008 1. Některé základní poznatky z elementární matematiky: Číselné obory, dělitelnost přirozených čísel, prvočísla a čísla složená, největší společný dělitel,
Maturitní okruhy z matematiky - školní rok 2007/2008 1. Některé základní poznatky z elementární matematiky: Číselné obory, dělitelnost přirozených čísel, prvočísla a čísla složená, největší společný dělitel,
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
8 Matice a determinanty
 M Rokyta, MFF UK: Aplikovaná matematika II kap 8: Matice a determinanty 1 8 Matice a determinanty 81 Matice - definice a základní vlastnosti Definice Reálnou resp komplexní maticí A typu m n nazveme obdélníkovou
M Rokyta, MFF UK: Aplikovaná matematika II kap 8: Matice a determinanty 1 8 Matice a determinanty 81 Matice - definice a základní vlastnosti Definice Reálnou resp komplexní maticí A typu m n nazveme obdélníkovou
z = a bi. z + v = (a + bi) + (c + di) = (a + c) + (b + d)i. z v = (a + bi) (c + di) = (a c) + (b d)i. z v = (a + bi) (c + di) = (ac bd) + (bc + ad)i.
 + (c + di) = (a + c) + (b + d)i. z v = (a + bi) (c + di) = (a c) + (b d)i. z v = (a + bi) (c + di) = (ac bd) + (bc + ad)i.") KOMLEXNÍ ČÍSLA C = {a + bi; a, b R}, kde i 2 = 1 Číslo komplexně sdružené k z = a + bi je číslo z = a bi. Operace s komplexními čísly: z = a + bi, kde a, b R v = c + di, kde c, d R Sčítání Odčítání Násobení
KOMLEXNÍ ČÍSLA C = {a + bi; a, b R}, kde i 2 = 1 Číslo komplexně sdružené k z = a + bi je číslo z = a bi. Operace s komplexními čísly: z = a + bi, kde a, b R v = c + di, kde c, d R Sčítání Odčítání Násobení
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Soustavy nelineárních rovnic pomocí systému Maple. Newtonova metoda.
 Úvod Soustavy nelineárních rovnic pomocí systému Maple. Newtonova metoda. Mnoho technických problémů vede na řešení matematických úloh, které se následně převedou na úlohy řešení soustav nelineárních rovnic
Úvod Soustavy nelineárních rovnic pomocí systému Maple. Newtonova metoda. Mnoho technických problémů vede na řešení matematických úloh, které se následně převedou na úlohy řešení soustav nelineárních rovnic
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Funkce v ıce promˇ enn ych Extr emy Pˇredn aˇska p at a 12.bˇrezna 2018
 Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Kontraktantní/dilatantní
 Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
Matematika 1 Jiˇr ı Fiˇser 19. z aˇr ı 2016 Jiˇr ı Fiˇser (KMA, PˇrF UP Olomouc) KMA MAT1 19. z aˇr ı / 19
 KMA MAT1 19. z aˇr ı / 19") Matematika 1 Jiří Fišer 19. září 2016 Jiří Fišer (KMA, PřF UP Olomouc) KMA MAT1 19. září 2016 1 / 19 Zimní semestr KMA MAT1 1 Úprava algebraických výrazů. Číselné obory. 2 Kombinatorika, základy teorie
Matematika 1 Jiří Fišer 19. září 2016 Jiří Fišer (KMA, PřF UP Olomouc) KMA MAT1 19. září 2016 1 / 19 Zimní semestr KMA MAT1 1 Úprava algebraických výrazů. Číselné obory. 2 Kombinatorika, základy teorie
B) výchovné a vzdělávací strategie jsou totožné se strategiemi vyučovacího předmětu Matematika.
 výchovné a vzdělávací strategie jsou totožné se strategiemi vyučovacího předmětu Matematika.") 4.8.3. Cvičení z matematiky Předmět Cvičení z matematiky je vyučován v sextě a v septimě jako volitelný předmět. Vzdělávací obsah vyučovacího předmětu Cvičení z matematiky vychází ze vzdělávací oblasti
4.8.3. Cvičení z matematiky Předmět Cvičení z matematiky je vyučován v sextě a v septimě jako volitelný předmět. Vzdělávací obsah vyučovacího předmětu Cvičení z matematiky vychází ze vzdělávací oblasti
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Lineární zobrazení. 1. A(x y) = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)
 = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)") 4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
Vektory a matice. Obsah. Aplikovaná matematika I. Carl Friedrich Gauss. Základní pojmy a operace
 Vektory a matice Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah 1 Vektory Základní pojmy a operace Lineární závislost a nezávislost vektorů 2 Matice Základní pojmy, druhy matic Operace s maticemi
Vektory a matice Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah 1 Vektory Základní pojmy a operace Lineární závislost a nezávislost vektorů 2 Matice Základní pojmy, druhy matic Operace s maticemi
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Učební texty k státní bakalářské zkoušce Matematika Skalární součin. študenti MFF 15. augusta 2008
 Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost
Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014. 1. Obor reálných čísel
 Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Mgr. Ladislav Zemánek Maturitní okruhy Matematika 2013-2014 1. Obor reálných čísel - obor přirozených, celých, racionálních a reálných čísel - vlastnosti operací (sčítání, odčítání, násobení, dělení) -
Matematika I A ukázkový test 1 pro 2011/2012. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a
x + (a + 1)y + z = 1 a") Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
7 Analytické vyjádření shodnosti
 7 Analytické vyjádření shodnosti 7.1 Analytická vyjádření shodných zobrazení v E 2 Osová souměrnost Osová souměrnost O(o) podle osy o s obecnou rovnicí o : ax + by + c =0: x = x 2a (ax + by + c) a 2 +
7 Analytické vyjádření shodnosti 7.1 Analytická vyjádření shodných zobrazení v E 2 Osová souměrnost Osová souměrnost O(o) podle osy o s obecnou rovnicí o : ax + by + c =0: x = x 2a (ax + by + c) a 2 +
CZ 1.07/1.1.32/02.0006
 PO ŠKOLE DO ŠKOLY CZ 1.07/1.1.32/02.0006 Číslo projektu: CZ.1.07/1.1.32/02.0006 Název projektu: Po škole do školy Příjemce grantu: Gymnázium, Kladno Název výstupu: Prohlubující semináře Matematika (MI
PO ŠKOLE DO ŠKOLY CZ 1.07/1.1.32/02.0006 Číslo projektu: CZ.1.07/1.1.32/02.0006 Název projektu: Po škole do školy Příjemce grantu: Gymnázium, Kladno Název výstupu: Prohlubující semináře Matematika (MI
Soustavy se spínanými kapacitory - SC. 1. Základní princip:
 Obvody S - popis 1 Soustavy se spínanými kapacitory - S 1. Základní princip: Simulace rezistoru přepínaným kapacitorem viz známý obrázek! (a rovnice) Modifikace základního spínaného obvodu: Obr. 2.1: Zapojení
Obvody S - popis 1 Soustavy se spínanými kapacitory - S 1. Základní princip: Simulace rezistoru přepínaným kapacitorem viz známý obrázek! (a rovnice) Modifikace základního spínaného obvodu: Obr. 2.1: Zapojení
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII
 PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
Základy maticového počtu Matice, determinant, definitnost
 Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Maticí typu (m, n), kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru:
, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru:") 3 Maticový počet 3.1 Zavedení pojmu matice Maticí typu (m, n, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru: a 11 a 12... a 1k... a 1n a 21 a 22...
3 Maticový počet 3.1 Zavedení pojmu matice Maticí typu (m, n, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru: a 11 a 12... a 1k... a 1n a 21 a 22...
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Maturitní témata z matematiky
 Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
Maturitní témata z matematiky G y m n á z i u m J i h l a v a Výroky, množiny jednoduché výroky, pravdivostní hodnoty výroků, negace operace s výroky, složené výroky, tabulky pravdivostních hodnot důkazy
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině.
 a silové působení v tekutině.") Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda
 Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
Numerické metody a programování. Lekce 4
 Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
7. Funkce jedné reálné proměnné, základní pojmy
 , základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
, základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
FP - SEMINÁŘ Z NUMERICKÉ MATEMATIKY. Katedra matematiky a didaktiky matematiky Technická univerzita v Liberci
 FP - SEMINÁŘ Z NUMERICKÉ MATEMATIKY Dana Černá http://www.fp.tul.cz/kmd/ Katedra matematiky a didaktiky matematiky Technická univerzita v Liberci OBSAH A CÍLE SEMINÁŘE: Opakování a procvičení vybraných
FP - SEMINÁŘ Z NUMERICKÉ MATEMATIKY Dana Černá http://www.fp.tul.cz/kmd/ Katedra matematiky a didaktiky matematiky Technická univerzita v Liberci OBSAH A CÍLE SEMINÁŘE: Opakování a procvičení vybraných
Matematika (CŽV Kadaň) aneb Úvod do lineární algebry Matice a soustavy rovnic
 aneb Úvod do lineární algebry Matice a soustavy rovnic") Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
stránkách přednášejícího.
 Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce