Kinematika = studium pohybu mechanických těles bez uvážení sil
|
|
|
- Rudolf Bárta
- před 7 lety
- Počet zobrazení:
Transkript
1 Knemata = tudum ohbu mehanýh těle be uvážení l
2 Knematé řetěe Knematé dvoe
3 Knematé řetěe Knematé dvoe
4 Knematé řetěe Knematé dvoe
5 Knematé řetěe Knematé dvoe
6 Knematé řetěe Illutaton of a 3 manulator
7 Knematé řetěe Illutraton of a heral wrt nemat

8 Stanford arm
9 Stanford arm
10 Pohb tělea

11 Geometré vetor Artmeté vetor q q q q q q q q
12 Pouvný ohb d r
13 Pouvný ohb rhlot d r
14 otační ohb
15 otační ohb
16 otační ohb
17 otační ohb
18 otační ohb výnam řádů a louů
19 otační ohb E E T T T Orthogonální mate
20 otační ohb det det det det det det det det det 2 2 E E T T T T T T T det Orthogonální mate SO3
21 otační ohb
22 Přílad otační ohb o n n o
23 Přílad o n n o o n o n n o l l l l dt d t dt d dt d t v otační ohb v l ω
24 Sférý ohb Euler
25 Sférý ohb reee rotae nutae
26 Sférý ohb oll Pth Yaw
27 Sférý ohb
28 Etue 2 ombnaí neávlýh tro rotaí olem ouřadnýh o. XYX 2. XZX 3. YXY 4. YZY 5. ZXZ 6. ZYZ Smetré. XYZ 2. XZY 3. YXZ 4. YZX 5. ZXY 6. ZYX Ametré otae ou možné olem loálníh o a olem globálníh o Celem e ta možnýh 24 ombnaí
29 otae olem globálníh o Potuná rotae vádru olem o Z 3 o X3 o Y9 o o o o G Y 9 X 3 Z 3 B oor na ořadí náobení
30 Tranformae rotoru Eulerovýh úhlů do rotoru SO3 není one to one nař. ro metrou rota ZYZ latí ro ametrou rota ZYX latí a b
31 Tranformae rotoru Eulerovýh úhlů do rotoru SO3 není one to one o n n o nař. ro metrou rota ZYZ latí ř ro ametrou rota ZYX latí ř 2 / n o o n
32 Obený ohb omoe ouvného a férého ohbu
33 Homogenní tranformae nátro nemat, očítačové graf, očítačového vdění..
34
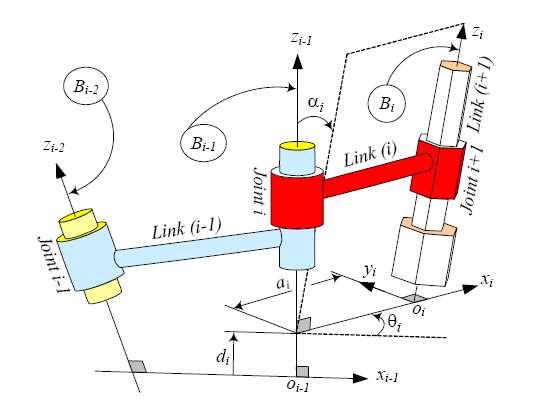
35 Denavt - Hartenberg
36
37
38
39
40
41 Euler
42 Y 3 Euler
43 oll Pth Yaw
44 oll Pth Yaw
45 žádaná oloha a orentae onového členu manulátoru žádaná oloha a orentae nátroe
46
47 Řešení nverní úloh deomoí rameno-áětí ro Eulerovo a PY áětí
48 r r q q q q q q q q q,,,,,, Kloubové ouřadne ramene
49
50 * * * n L E L E L E r r r r 6 6 r r n n n l E
51 6 6 n L E r r n L L E n L E E n L E n r r r r r T T r r r n n n l
52 r r, tan, tan q A q A q
53 , tan, tan q A q A q a o n a o n a o n 36
54 a a, Atan nebo, Atan 2 2 a a a a n n a o n a o n a o n 36 on. Atan, Atano,n Atan2,..Atan2n,o
55 n n, Atan, Atan o n a a, Atan, Atan o n a a a o n a o n a o n 36
56 a a o n o n o n o ;8 ; o ; n a o n a o n a o n 36
57 o n o n o n,- Atan n n -
58 Orentae Yaw Pth oll
59 Orentae Yaw Pth oll Ψ th Θ f Φ =[o -n n o ] =[oth nth -nth oth] =[ of -nf nf of] or=** = [*th, -*f+*th*f, *f+*th*f] [ *th, *f+*th*f, -*f+*th*f] [ -th, th*f, th*f ]
60 Orentae Yaw Pth oll Ψ th Θ f Φ or = nvere ladným naménem oθ th=atan2-or3,,qrt-or3,^2 = 2 o =atan2or2,,or, = o f=atan2or3,2,or3,3 = 3 o a
61 Orentae Yaw Pth oll Ψ th Θ f Φ or = nvere e áorným naménem oθ th=atan2-or3,,-qrt-or3,^2 = 6 o =atan2-or2,,-or, = -7 o f=atan2-or3,2,-or3,3 = -5 o
62 Orentae Yaw Pth oll Ψ th Θ f Φ or = Numerý výočet říadu b =9/8*; the=6/8*; f=-5/8*; 32 = b =[o -n ; n o ; ]; 2=[othe nthe; ; -nthe othe]; 3=[ ; of -nf ; nf of]; 32=*2*3
63
64 Knemata úhlovýh rhlotí q q q q q q q q q q q S q S S q olometrá mate
65 Knemata úhlovýh rhlotí Vádření vetorového oučnu omoí PSM ab S a b oor na bá S a S a b b
66 Knemata úhlovýh rhlotí b a S b a S b a S T b a S b a S b a S T T T a S a S a S a S T T
67 Knemata úhlovýh rhlotí Předoládeme nní, že outava oná vhledem outavě férý ohb haraterovaný vetorem otáčvé rhlot ω. Je-l v outavě evný bod ehož oloha e haraterována vetorem e ouvná rhlot tohoto bodu dána vetorovým oučnem v ω v d dt d dt S ω S ω d dt S ω S ω S ω T
68 Knemata úhlovýh rhlotí Předoládeme nní, že máme 3 outav očílované nde,,2. Soutava e evná. Soutava oná vhledem outavě férý ohb haraterovaný vetorem otáčvé rhlot ω. Soutava 2 oná vhledem outavě férý ohb haraterovaný vetorem otáčvé rhlot ω 2. Zaímá ná vádření otáčvé rhlot ω elového férého ohbu terý vonává outava 2 vhledem outavě. 2 2 d 2 d d2 2 dt dt dt
69 Knemata úhlovýh rhlotí 2 2 d 2 d d2 2 dt dt dt S ω 2 S ω S ω S ω S ω S ω S ω S ω 2 2 S ω T S ω S ω S ω2 ω ω ω2
70 Knemata úhlovýh rhlotí S ω S ω S ω2 ω ω ω2 ω ω ω 2 ω 3... ω n, ω ω ω 2 2 ω 32..., n ω n, n umožňue efetvní výočet neté energe outav
71 Eulerov nematé rovne YP úhlové rhlot v áladní outavě r a r a ω ω
72 ω d*[ ]'+thd**[ ]'+fd***[ ] ' an = [ -thd*n+fd*o*oth] [ thd*o+fd*n*oth] [ d-fd*nth] [ w] [ w] [ w] Eulerov nematé rovne YP úhlové rhlot v áladní outavě
73 [w]=[ -thd*n+fd*o*oth] [w]=[ thd*o+fd*n*oth] [w]=[ d-fd*nth ] Eulerov nematé rovne YP úhlové rhlot v áladní outavě n o n o o o n Jaoban
74 Eulerov nematé rovne YP úhlové rhlot v áladní outavě o ro 9 n o o ran J ran o n o n 3 o ro 9 n ran J ran o n 2!!!!!!
75 Eulerov nematé rovne YP úhlové rhlot v áladní outavě m w w w th f real %voet rhlot uhlu PY uhlovh rhlot otaen v eme outave W=[w w w]' J=[ -n o*oth; o n*oth; -nth] EU=nvJ*W %eulerov uhl [ th f] % an = [ o*nth*w+n*nth*w+w*oth/oth] [ -n*w+o*w ] [ o*w+n*w/oth ] Nehtˇ e letadlo v oloe =f= a th 9o. Nní otáčíme letadlo oue olem emé o X rhlotí w. Pa e Euler. úhl a f mění velm rhle.
76 r a rr ar r r ω r ω Eulerov nematé rovne YP úhlové rhlot v outavě robota
77 r ω d*nv**[ ]'+thd*nv*[ ]'+fd*[ ]' an = [ -d*nth+fd] [ d*oth*nf+thd*of] [ -thd*nf+d*oth*of] Eulerov nematé rovne YP úhlové rhlot v outavě robota
78 Eulerov nematé rovne YP úhlové rhlot v outavě robota [wr]=[ -d*nth+fd ] [wr]=[ d*oth*nf+thd*of ] [wr]=[ -thd*nf+d*oth*of ]
79 Eulerov nematé rovne YP výočet rhlot Euler úhlů údaů grooů v ředhoí lde A b rhlot E úhlů A=[-nth ; oth*nf of ; oth*of -nf ] = [d thd fd] b = [w w w]' = nva*b údae grooů = [ nf*w+w*of/oth] [ of*w-nf*w] [ w*oth+nth*nf*w+nth*of*w/oth]
80 Eulerov nematé rovne YP výočet rhlot Euler úhlů údaů grooů = [d thd fd] = [ nf*w+w*of/oth ] [ of*w-nf*w ] [ w*oth+nth*nf*w+nth*of*w/oth] n o o o n o n n n o o
81 Gmbal lo
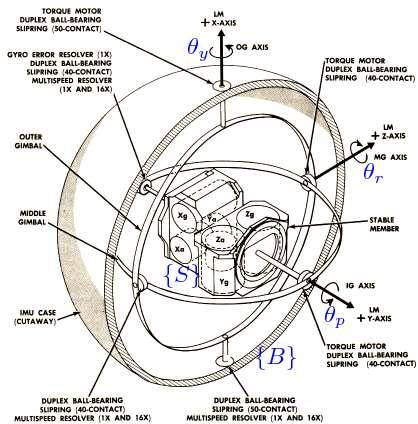
82 Gmbal lo
83
ZATÍŽENÍ ROVINNÝCH PRUTŮ
 ZATÍŽENÍ ROVINNÝCH PRUTŮ Oaování rovnoměrné (ontantní) 0 ξ r l r r l ξ r l trojúhelníové r 0 ξ r l ξ b r b l ξ l r 3 l b a r + b a b a r l + + ξ 3 a b lineární (lichoběžníové) r 0 ξ ξ r l ξ + ξ l a b a
ZATÍŽENÍ ROVINNÝCH PRUTŮ Oaování rovnoměrné (ontantní) 0 ξ r l r r l ξ r l trojúhelníové r 0 ξ r l ξ b r b l ξ l r 3 l b a r + b a b a r l + + ξ 3 a b lineární (lichoběžníové) r 0 ξ ξ r l ξ + ξ l a b a
 Ř š ý Ť Ť Ť ř š ř š ů ž ó ů ó ó óř ý ý Š Š ř Ú ř ó ů ž ář Ú ů ž ú ý ý ž ů š ó ý ó á Ž ó š ú ý ž ó ú š ó š ú ý ř ú ň ó ú ý ů ú ů ý Ý š úř ř ó ý ř ó ř á š á Žá ř ř řá á ý Žá ž á ř ř š ž ň á ý á ý ž ž ř á
Ř š ý Ť Ť Ť ř š ř š ů ž ó ů ó ó óř ý ý Š Š ř Ú ř ó ů ž ář Ú ů ž ú ý ý ž ů š ó ý ó á Ž ó š ú ý ž ó ú š ó š ú ý ř ú ň ó ú ý ů ú ů ý Ý š úř ř ó ý ř ó ř á š á Žá ř ř řá á ý Žá ž á ř ř š ž ň á ý á ý ž ž ř á
14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1
 14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1 S Á ČK Y NA PS Í E XK RE ME N TY SÁ ČK Y e xk re m en t. p o ti sk P ES C Sá čk y P ES C č er né,/ p ot is k/ 12 m y, 20 x2 7 +3 c m 8.8 10 bl ok
14/10/2015 Z Á K L A D N Í C E N Í K Z B O Ž Í Strana: 1 S Á ČK Y NA PS Í E XK RE ME N TY SÁ ČK Y e xk re m en t. p o ti sk P ES C Sá čk y P ES C č er né,/ p ot is k/ 12 m y, 20 x2 7 +3 c m 8.8 10 bl ok
7.3.9 Směrnicový tvar rovnice přímky
 7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
Křivkové integrály prvního druhu Vypočítejte dané křivkové integrály prvního druhu v R 2.
 Křivové integrál prvního druhu Vpočítejte dané řivové integrál prvního druhu v R. Přílad. ds x, de je úseča AB, A[, ], B[4, ]. Řešení: Pro řivový integrál prvního druhu platí: fx, ) ds β α fϕt), ψt)) ϕ
Křivové integrál prvního druhu Vpočítejte dané řivové integrál prvního druhu v R. Přílad. ds x, de je úseča AB, A[, ], B[4, ]. Řešení: Pro řivový integrál prvního druhu platí: fx, ) ds β α fϕt), ψt)) ϕ
 Á Í Č Ě Č ň ť Š Č Ť ň ň ď Ť Ú ť Č ň ď ť Č Š Ž Ú Ť Ť Ť Ť ň Ť Ť ť Ť Ť Á Ť Ť Ť ď Ť Ť Ť Ť Ť Ť Ť Ť Ť ň ďť Ť Ť Ť Š Š Š ď ň Č Š ň Š ť Š ň Š Š Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ú Š ň ť ť Š ň Š Ž ť ť ť ň Š Č Š Š Í
Á Í Č Ě Č ň ť Š Č Ť ň ň ď Ť Ú ť Č ň ď ť Č Š Ž Ú Ť Ť Ť Ť ň Ť Ť ť Ť Ť Á Ť Ť Ť ď Ť Ť Ť Ť Ť Ť Ť Ť Ť ň ďť Ť Ť Ť Š Š Š ď ň Č Š ň Š ť Š ň Š Š Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ť Ú Š ň ť ť Š ň Š Ž ť ť ť ň Š Č Š Š Í


Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
ý č ě é é í Č Č ří š í ú ýž í š ě á í ý š á á ý í í š ř í é ě í ú é ě é č č ří š í í é í é č ý í ř ý á í š ě á í š ě í ýž í áš í ž ž á ý č ě í ří ř á
 ý ě Č Č ř š ú ýž š ě ý š ý š ř ě ú ě ř š ý ř ý š ě š ě ýž š ž ž ý ě ří ř ě ú ú ň ň ý ě ý ě ě ž ř ř ř ý ř ýř ř ř ď ú ú ě ý ř ř š ě ř ú Č ň ý ú ýž š ě ř ý š ě ř ě ě š ě ýž š ě š ú ě ý ý ý ú ýž š ě úř ý š
ý ě Č Č ř š ú ýž š ě ý š ý š ř ě ú ě ř š ý ř ý š ě š ě ýž š ž ž ý ě ří ř ě ú ú ň ň ý ě ý ě ě ž ř ř ř ý ř ýř ř ř ď ú ú ě ý ř ř š ě ř ú Č ň ý ú ýž š ě ř ý š ě ř ě ě š ě ýž š ě š ú ě ý ý ý ú ýž š ě úř ý š
m cyklotronová frekvence
 Způsob popisu Pohb části poli nějším Pohb části selfonsistentním poli Kinetié ronie Hdrodnamié ronie * teutin * 1 teutina * magnetohdrodnamia Pohb části e nějším poli A) Homogenní pole a) E = d m q dt
Způsob popisu Pohb části poli nějším Pohb části selfonsistentním poli Kinetié ronie Hdrodnamié ronie * teutin * 1 teutina * magnetohdrodnamia Pohb části e nějším poli A) Homogenní pole a) E = d m q dt
PRAVDĚPODOBNOST A STATISTIKA. Náhodný vektor nezávislost, funkce náhodného vektoru
 SP Náhodý vetor ezávislost fuce NV PRAVDĚPODONOST A STATISTIKA Náhodý vetor ezávislost fuce áhodého vetoru Libor Žá Náhodý vetor stochasticá ezávislost Náhodé veličiy... defiovaé a ravděodobostím rostoru
SP Náhodý vetor ezávislost fuce NV PRAVDĚPODONOST A STATISTIKA Náhodý vetor ezávislost fuce áhodého vetoru Libor Žá Náhodý vetor stochasticá ezávislost Náhodé veličiy... defiovaé a ravděodobostím rostoru
PRAVDĚPODOBNOST A STATISTIKA. Náhodný vektor nezávislost, funkce náhodného vektoru
 SP Náhodý vetor ezávislost fuce NV PRAVDĚPODONOST A STATISTIKA Náhodý vetor ezávislost fuce áhodého vetoru Libor Žá Náhodý vetor stochasticá ezávislost Náhodé veličiy... defiovaé a ravděodobostím rostoru
SP Náhodý vetor ezávislost fuce NV PRAVDĚPODONOST A STATISTIKA Náhodý vetor ezávislost fuce áhodého vetoru Libor Žá Náhodý vetor stochasticá ezávislost Náhodé veličiy... defiovaé a ravděodobostím rostoru
 ó ÝšÉč ó Áč š ó š č ň ž š ó ř č č ř č š č ř č ř ř Ť ó š Ž Ú č č š ž ř ó ř ž Ž Ó žň Ť Ž č č Ý š ž ž ř č š š Ž ř Ž Ú ú ž ř ž č ž č š ř ž ú ó ř š ů ž č ó ú ž ž Á ň š ř ů ú Ž č ř ů Ž č ž ř ů ó Ú É ž š č ř
ó ÝšÉč ó Áč š ó š č ň ž š ó ř č č ř č š č ř č ř ř Ť ó š Ž Ú č č š ž ř ó ř ž Ž Ó žň Ť Ž č č Ý š ž ž ř č š š Ž ř Ž Ú ú ž ř ž č ž č š ř ž ú ó ř š ů ž č ó ú ž ž Á ň š ř ů ú Ž č ř ů Ž č ž ř ů ó Ú É ž š č ř
QUADROTORY. Ing. Vlastimil Kříž
 QUADROTORY ng. Vlastiil Kříž Obsah 2 Mateatický odel, říení transforace ei báei (rotace) staoý popis říení Eistující projekt unieritní hobb koerční Quadrotor 3 ožnost isu iniu pohbliých součástek dobrý
QUADROTORY ng. Vlastiil Kříž Obsah 2 Mateatický odel, říení transforace ei báei (rotace) staoý popis říení Eistující projekt unieritní hobb koerční Quadrotor 3 ožnost isu iniu pohbliých součástek dobrý
Kopie z www.dsagro.cz
 ó š š ú š ó ú š Á ó ú ě Ť ú ě ó ěž ú ú ěž ú ó ď ú É úó ě ě ž ř ť ž ó š Ý š Á Ú š É óň ú ú ř ď š ó ď ď Ň ň Ťž ó ě ú ž ž ó Ů ó ř ž óú ú Á ž ž ž ó ť ž ě ě ž Ř ó ř ě š š ÉÚ š ě ě ž ř ž ž š ě ř ň ě ř ě ě ú
ó š š ú š ó ú š Á ó ú ě Ť ú ě ó ěž ú ú ěž ú ó ď ú É úó ě ě ž ř ť ž ó š Ý š Á Ú š É óň ú ú ř ď š ó ď ď Ň ň Ťž ó ě ú ž ž ó Ů ó ř ž óú ú Á ž ž ž ó ť ž ě ě ž Ř ó ř ě š š ÉÚ š ě ě ž ř ž ž š ě ř ň ě ř ě ě ú
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Analytická metoda aneb Využití vektorů v geometrii
 KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
CVIČENÍ Z ELEKTRONIKY
 Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
 ř ť ř é ř Š ř š ř ř Č ú Č Č ř ř ó ř é ř ř ř Č Č ú ř Ř Ě ř ť ó ť ř š ť š é ú é š š ř ř é ÁŘ ů š é é š š ů é š é é é š ř ř ů ú é é é ř ř ů é ó é ť é ň é é ú š é é Ý ř ť ř é é ů Ř š ř é é ř ú ř š ř ó é ú
ř ť ř é ř Š ř š ř ř Č ú Č Č ř ř ó ř é ř ř ř Č Č ú ř Ř Ě ř ť ó ť ř š ť š é ú é š š ř ř é ÁŘ ů š é é š š ů é š é é é š ř ř ů ú é é é ř ř ů é ó é ť é ň é é ú š é é Ý ř ť ř é é ů Ř š ř é é ř ú ř š ř ó é ú
 Í Í Ř ď Í Á É Á Í Í Ě Í Í Á Í Á Ú Ť É Ě Í É Í ť Ě ŠÍ Í É ř ř ů ř ý ý é é ý ý é ý ý ř ů ý ý ý ř ý ů é ř ý řďů ý é é ř é ř ř ů ď ů ů ů ů é ý ý ť é ř Ť é é ý é é é é ď ď ňů ý ů ů é ř ř é ý ý ř é ď ý ý ů
Í Í Ř ď Í Á É Á Í Í Ě Í Í Á Í Á Ú Ť É Ě Í É Í ť Ě ŠÍ Í É ř ř ů ř ý ý é é ý ý é ý ý ř ů ý ý ý ř ý ů é ř ý řďů ý é é ř é ř ř ů ď ů ů ů ů é ý ý ť é ř Ť é é ý é é é é ď ď ňů ý ů ů é ř ř é ý ý ř é ď ý ý ů
qb m cyklotronová frekvence
 Způsob popisu Pohb části poli nějším Pohb části selfonsistentním poli Kinetié ronie Hdrodnamié ronie * teutin * 1 teutina * magnetohdrodnamia Pohb části e nějším poli A) Homogenní pole a) E = d m q = =
Způsob popisu Pohb části poli nějším Pohb části selfonsistentním poli Kinetié ronie Hdrodnamié ronie * teutin * 1 teutina * magnetohdrodnamia Pohb části e nějším poli A) Homogenní pole a) E = d m q = =
Ing. Vladimíra Michalcová, Ph.D. Katedra stavební mechaniky (228)
") Stavebí statka - vyučující Dooručeá lteratura Ig. Vladmíra chalcová, h.d. Katedra stavebí mechaky (228) místost: LH 47/ tel.: (59 732) 348 e mal: vladmra.mchalcova@vsb.c www: htt://fast.vsb.c/mchalcova
Stavebí statka - vyučující Dooručeá lteratura Ig. Vladmíra chalcová, h.d. Katedra stavebí mechaky (228) místost: LH 47/ tel.: (59 732) 348 e mal: vladmra.mchalcova@vsb.c www: htt://fast.vsb.c/mchalcova
Předmět BROB - Robotika. 4 Kvaternionová matematika
 Předmět BROB - Robotika Jméno Ročník Řeháček Tomáš 136580, Blaha Vít 136503, Michna Jakub 134560 2 Studijní skupina AMT Kontroloval Hodnocení Dne 30.4.2012 Číslo úlohy Název úlohy 4 Kvaternionová matematika
Předmět BROB - Robotika Jméno Ročník Řeháček Tomáš 136580, Blaha Vít 136503, Michna Jakub 134560 2 Studijní skupina AMT Kontroloval Hodnocení Dne 30.4.2012 Číslo úlohy Název úlohy 4 Kvaternionová matematika
 ÁŘ Ě Ž ň Ť Ť ú ň ň ň Ť ň ň ť ň ú ť Ě Ě ť ň ň ň Ě Ť Ť ť Ý Ť ť ň ň ú ť Ť ň ň Ě ňú ů ň ň Ť ň ď Č ň Ť ň ň Á ď ď ť Č ť ď ď ň ť ňť ň ň Ť Ť Ť ť Ó ď Ó ú ď ď Ě ú ď Ž ú ú ň ň Ó Ě ň ň Ť ť ť ú ď ď ď Š Ť Ó Ť Ó ť ň
ÁŘ Ě Ž ň Ť Ť ú ň ň ň Ť ň ň ť ň ú ť Ě Ě ť ň ň ň Ě Ť Ť ť Ý Ť ť ň ň ú ť Ť ň ň Ě ňú ů ň ň Ť ň ď Č ň Ť ň ň Á ď ď ť Č ť ď ď ň ť ňť ň ň Ť Ť Ť ť Ó ď Ó ú ď ď Ě ú ď Ž ú ú ň ň Ó Ě ň ň Ť ť ť ú ď ď ď Š Ť Ó Ť Ó ť ň
 Ž Ý ř Ů ř ó ř ř Ý ř ó ř óú ř ů ř ř ř ř ž ř Ž ř ř ň ů ř ř ř ř ř ř ř ó ř ř Á ř Ž ř Ž ř ř ř Ž ů ř Ž ř ň ó É ů ř ů ř ř ř Ř ř ř ů ř ň ř ů ř ř ů Ž Á ó Ž ř ř Ž ř ř ř ť ř ů ž ř ů ř ř ř ů ř ř ř ř ř ř ř ř ř Ť ň
Ž Ý ř Ů ř ó ř ř Ý ř ó ř óú ř ů ř ř ř ř ž ř Ž ř ř ň ů ř ř ř ř ř ř ř ó ř ř Á ř Ž ř Ž ř ř ř Ž ů ř Ž ř ň ó É ů ř ů ř ř ř Ř ř ř ů ř ň ř ů ř ř ů Ž Á ó Ž ř ř Ž ř ř ř ť ř ů ž ř ů ř ř ř ů ř ř ř ř ř ř ř ř ř Ť ň
Řešení: Nejprve musíme napsat parametrické rovnice křivky C. Asi nejjednodušší parametrizace je. t t dt = t 1. x = A + ( B A ) t, 0 t 1,
 t, 0 t 1,") Určete Křivkový integrál příklad 4 x ds, kde {x, y ; y ln x, x 3}. Řešení: Nejprve musíme napsat parametrické rovnice křivky. Asi nejjednodušší parametrizace je Tedy daný integrál je x ds x t, y ln t,
Určete Křivkový integrál příklad 4 x ds, kde {x, y ; y ln x, x 3}. Řešení: Nejprve musíme napsat parametrické rovnice křivky. Asi nejjednodušší parametrizace je Tedy daný integrál je x ds x t, y ln t,
ú é é č žé é é ě é é ž ř ž é ě ů Ř ň ž é é řď ú é Á ř é č ř ž ó ř ě ú ů é ě ě ř é č ž é ě ř ě Č ď ř ř č ž ě ě ů ě ř č ě é ž ů ř ó é ř č ř ě ě ř č é é
 Č é Č Í č č Á é č č ě ř ě ř é č č č ř ž ěř č č ř ě č č é ě é ě ž ů č Ý Ť é ř ě é ť ě ů ě é é ť ř ů ě ř ě ů č Š ě ó ó ž ť č ř ž ř ž ě č ž ř Š ž ě ó ž ě ž ě č Šř ú é é č žé é é ě é é ž ř ž é ě ů Ř ň ž é
Č é Č Í č č Á é č č ě ř ě ř é č č č ř ž ěř č č ř ě č č é ě é ě ž ů č Ý Ť é ř ě é ť ě ů ě é é ť ř ů ě ř ě ů č Š ě ó ó ž ť č ř ž ř ž ě č ž ř Š ž ě ó ž ě ž ě č Šř ú é é č žé é é ě é é ž ř ž é ě ů Ř ň ž é
 š ř Č šť ň ř ž Č Č ř ž š š ď Č Č ť ř ř ž ř ř ž š ř ř ř ř š ř ď š ř š ř ž š š ř š š š š š ď š ď š š ř š ř Ž Á š ř ž ř ů š ř ů ř Ú ř Ú ů ů ň ř ů š ř š Ú ř š ď š š š š ůž ř ň ř ň š š š Č Ú š ž ř ž ř ř š š
š ř Č šť ň ř ž Č Č ř ž š š ď Č Č ť ř ř ž ř ř ž š ř ř ř ř š ř ď š ř š ř ž š š ř š š š š š ď š ď š š ř š ř Ž Á š ř ž ř ů š ř ů ř Ú ř Ú ů ů ň ř ů š ř š Ú ř š ď š š š š ůž ř ň ř ň š š š Č Ú š ž ř ž ř ř š š
7.3.9 Směrnicový tvar rovnice přímky
 739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
j k k k i k k k k k j k j j j j ij i k k jk k k jk k j j i
 1.Stá-la Mat-a od-ho-dla-ně v sl-zách ve- dle ří-že Pá-ně, na te-rém Syn e-í pněl. Je- í du-š v hoř-ém lá-ní slí-če - nou, bez sm-lo - vá-ní do hlu-bn meč o-te - vřel. a f d b f Copyrght by
1.Stá-la Mat-a od-ho-dla-ně v sl-zách ve- dle ří-že Pá-ně, na te-rém Syn e-í pněl. Je- í du-š v hoř-ém lá-ní slí-če - nou, bez sm-lo - vá-ní do hlu-bn meč o-te - vřel. a f d b f Copyrght by
 ů ů ř É ř řřň ů ů ř ř Ú ó ó ó ť ň ó ó ř ř ř š ř ů ů ů ů š ů ů ř ů ů ř ř ř ř ř ů ř ř ó ň ó š ř É ó š řó š ó řó óž ř ř ž ř ž ř ř ř ř Í ř š ů Š ů ř š Š ř ň Š š Š Š ř ž ť ň ň Š š š ň ř Š ň ň ř š Š Š š Í š
ů ů ř É ř řřň ů ů ř ř Ú ó ó ó ť ň ó ó ř ř ř š ř ů ů ů ů š ů ů ř ů ů ř ř ř ř ř ů ř ř ó ň ó š ř É ó š řó š ó řó óž ř ř ž ř ž ř ř ř ř Í ř š ů Š ů ř š Š ř ň Š š Š Š ř ž ť ň ň Š š š ň ř Š ň ň ř š Š Š š Í š
Prvky z knihovny programu SNAP 2.6, aktualizace z
 Prv ov roru SNAP.6, ul.7.4 Séé č jou fová v ouoru SNAP.LB. Mé ol jou fová v ouoru SNAP.CDL. Mový o j vjář ráý é l voru: rv očí č rr ol ový o vu u - výu ouu - ror - oor ouor G G - vovo G G G G G or C C
Prv ov roru SNAP.6, ul.7.4 Séé č jou fová v ouoru SNAP.LB. Mé ol jou fová v ouoru SNAP.CDL. Mový o j vjář ráý é l voru: rv očí č rr ol ový o vu u - výu ouu - ror - oor ouor G G - vovo G G G G G or C C
Elektrické přístroje. Přechodné děje při vypínání
 VŠB - Techická uiverzita Ostrava Fakulta elektrotechiky a iformatiky Katedra elektrických strojů a řístrojů Předmět: Elektrické řístroje Protokol č.5 Přechodé děje ři vyíáí Skuia: Datum: Vyracoval: - -
VŠB - Techická uiverzita Ostrava Fakulta elektrotechiky a iformatiky Katedra elektrických strojů a řístrojů Předmět: Elektrické řístroje Protokol č.5 Přechodé děje ři vyíáí Skuia: Datum: Vyracoval: - -
 ú ľž ě ý ú ľž č é š Ř ń Ž č ý ú ž č é š ú Ž ľ č ý ú ž č é š ř č é ě č ľ ě ě Š š řč Č Č ą Č č úč Č Č Č Ę ř é ě é Ž č Úč éž č ý ř ř ě č ř ý é č ú Ž č ý č é ú ż č é š ě é ř š č č é č č é ě č č é é Ž Ž ö č
ú ľž ě ý ú ľž č é š Ř ń Ž č ý ú ž č é š ú Ž ľ č ý ú ž č é š ř č é ě č ľ ě ě Š š řč Č Č ą Č č úč Č Č Č Ę ř é ě é Ž č Úč éž č ý ř ř ě č ř ý é č ú Ž č ý č é ú ż č é š ě é ř š č č é č č é ě č č é é Ž Ž ö č
ď Í óč á ě ú óí í ť ú í ý ý Ě Í ý ě í ě í ě í ě Í Í Í ó í Í í í É ó í í á ě í í ě í ó ří č ý Ýú í í í Í ě ú Ě ě Í í Í á ý ý í É í í Í Í óí Ó ě á í Í á
 ď Í óč á ě ú óí ť ú ý ý Ě Í ý ě ě ě ě Í Í Í ó Í É ó á ě ě ó ř č ý Ýú Í ě ú Ě ě Í Í á ý ý É Í Í óí Ó ě á Í á é ě ó É Í á Ě ř é ů ř á ú č ř ě ý á ó ď ý Ú ř ř ú ř ó Ť ó ó Íě ě ú ý ě ý é Í ě Í ů ů é á ě á
ď Í óč á ě ú óí ť ú ý ý Ě Í ý ě ě ě ě Í Í Í ó Í É ó á ě ě ó ř č ý Ýú Í ě ú Ě ě Í Í á ý ý É Í Í óí Ó ě á Í á é ě ó É Í á Ě ř é ů ř á ú č ř ě ý á ó ď ý Ú ř ř ú ř ó Ť ó ó Íě ě ú ý ě ý é Í ě Í ů ů é á ě á
á ý é í č ří Ť á íč é í ž č ř Í é Ť č í ž á ý ý á é č í ý ř ří í ž ř é ř á á í ý ý ů í Í ř ů Ž á á á ž ří š ě Í ž č é ří ř í ř í Ť ý š ý ř í ý ů ří ř
 á ý č ř Ť á č ž č ř Í Ť č ž á ý ý á č ý ř ř ž ř ř á á ý ý ů Í ř ů Ž á á á ž ř š ě Í ž č ř ř ř Ť ý š ý ř ý ů ř ř á š á Í ř ý ý ř ř č ř ř Í š ý Í Ť č ř á Í ó č ř ý ž ý Í ř č ž á ř ž ý ž ří ř š Í É Í ř Í
á ý č ř Ť á č ž č ř Í Ť č ž á ý ý á č ý ř ř ž ř ř á á ý ý ů Í ř ů Ž á á á ž ř š ě Í ž č ř ř ř Ť ý š ý ř ý ů ř ř á š á Í ř ý ý ř ř č ř ř Í š ý Í Ť č ř á Í ó č ř ý ž ý Í ř č ž á ř ž ý ž ří ř š Í É Í ř Í
18. Shodnost a podobnost trojúhelníků Vypracovala: Ing. Všetulová Ludmila, prosinec 2013
 18. Shodnost a podobnost trojúhelníků Vypracovala: Ing. Všetulová Ludmila, prosinec 2013 Název školy Obchodní akademie a Střední odborné učiliště Veselí nad Moravou Název a číslo OP OP Vzdělávání pro konkurenceschopnost,
18. Shodnost a podobnost trojúhelníků Vypracovala: Ing. Všetulová Ludmila, prosinec 2013 Název školy Obchodní akademie a Střední odborné učiliště Veselí nad Moravou Název a číslo OP OP Vzdělávání pro konkurenceschopnost,
č í úř é č úň ž č ň ř č é ř í š ň é č č čí ó ř á é é ů á č é ň é ň á í š ě č áš č ý ř ó š á á á č íó á ň á Ř Á í ří ů á ý á č í í řú ů ě í ě š ř ú á á
 í úř úň ž ň ř ř í š ň í ó ř á ů á ň ň á í š ě áš ý ř ó š á á á íó á ň á Ř Á í ří ů á ý á í í řú ů ě í ě š ř ú á á ž ň í í í á á ň ř á í ú á Č ó Čá Ó í Č É řžňá ř ž ň ý á ň ó á ž ó ř ú ň á á ť ú á ěí ú
í úř úň ž ň ř ř í š ň í ó ř á ů á ň ň á í š ě áš ý ř ó š á á á íó á ň á Ř Á í ří ů á ý á í í řú ů ě í ě š ř ú á á ž ň í í í á á ň ř á í ú á Č ó Čá Ó í Č É řžňá ř ž ň ý á ň ó á ž ó ř ú ň á á ť ú á ěí ú
 ň ú Ě É Ř ď ú ú ú ú Č Č Č Č ú ú ú ú Ú ú ú Ú ú ú Ú ú ú ň ú ú ú Ť ú ň ú ť ú ť ú ú ú ť ú ň ú ú Ú Č ú ť ú ú Ď ú ú Ú ú ú ú Ý ú ň ť Ř ť Ř ť ť Ř ť ť ť ť Ý Ž ť ť ť ť ň ť Ř ť É ť ť ňů Ý ť Č ú ť ť Ů ť ť ú Ý ť ť
ň ú Ě É Ř ď ú ú ú ú Č Č Č Č ú ú ú ú Ú ú ú Ú ú ú Ú ú ú ň ú ú ú Ť ú ň ú ť ú ť ú ú ú ť ú ň ú ú Ú Č ú ť ú ú Ď ú ú Ú ú ú ú Ý ú ň ť Ř ť Ř ť ť Ř ť ť ť ť Ý Ž ť ť ť ť ň ť Ř ť É ť ť ňů Ý ť Č ú ť ť Ů ť ť ú Ý ť ť
Á ó ú Ž ó Ú ó ó ó ňď Ň Š ó ú É ó ó Ý ó ó óď ú Ý ó Ť Ž ú Č Č ú ú
 Š Ž ŘČ Ě Ě Č Á ó ú Ž ó Ú ó ó ó ňď Ň Š ó ú É ó ó Ý ó ó óď ú Ý ó Ť Ž ú Č Č ú ú Ý Č Ť ď Š Ú ť Ž ň Ž Ú Ž Ž Č Ž Ž ú ť ň Ž Ý Ý Č Č Č Ž ň ó Č Š Ú ň ú ú Š ť Š Ž ó ú ň ť Ú Ú ň ú ú ť Š ó ú Ú Š Ú Ž Ú ň ť ó ň Ž Ť
Š Ž ŘČ Ě Ě Č Á ó ú Ž ó Ú ó ó ó ňď Ň Š ó ú É ó ó Ý ó ó óď ú Ý ó Ť Ž ú Č Č ú ú Ý Č Ť ď Š Ú ť Ž ň Ž Ú Ž Ž Č Ž Ž ú ť ň Ž Ý Ý Č Č Č Ž ň ó Č Š Ú ň ú ú Š ť Š Ž ó ú ň ť Ú Ú ň ú ú ť Š ó ú Ú Š Ú Ž Ú ň ť ó ň Ž Ť
Křížová cesta - postní píseň
 1.a)U sto - lu s ná - mi se - dí Pán, chléb spá- sy bu - de po - dá - ván, 1.b)A je to po - krm ži - vo - ta, do kon-ce svě-ta bu - de brán, 2.Do tmy se hrou-ží zah-ra - da. Je - žíš se do muk pro-pa -
1.a)U sto - lu s ná - mi se - dí Pán, chléb spá- sy bu - de po - dá - ván, 1.b)A je to po - krm ži - vo - ta, do kon-ce svě-ta bu - de brán, 2.Do tmy se hrou-ží zah-ra - da. Je - žíš se do muk pro-pa -
 Č š š č čš ř č ř š ř šš š ě ě š ř ů č ř č ť č ř ě ě ě ě ů č ě ě š ř ů ě š Č ř ě ó ř š ů ě ě ě ž ť ř ě ž č č ť Í ž ěř č ě ů č ř ř š ě ř ě š ď ěř ě ž š úč Č š Č ČŠ ř ě ř ž č ř ů ě š č ě úč š ě č ř č č ě
Č š š č čš ř č ř š ř šš š ě ě š ř ů č ř č ť č ř ě ě ě ě ů č ě ě š ř ů ě š Č ř ě ó ř š ů ě ě ě ž ť ř ě ž č č ť Í ž ěř č ě ů č ř ř š ě ř ě š ď ěř ě ž š úč Č š Č ČŠ ř ě ř ž č ř ů ě š č ě úč š ě č ř č č ě
Ý Á Í ŘÁ Č Á
 Ý Á Í ŘÁ Č Á Ř Á úč ř č ě ů Ť é č ě š ř ž š é é š é é Ý ž š é ó ó ť š ž ů é Ť é ž é ů ú š ň ž ě š ž š é é ř š š ě š ó č é ů š ě ř š ť ť é ř ž ó ř š é Ť é ě š ř ě ř š ř ě ó é é ú ů Á ř é é é č š é ř ž ř
Ý Á Í ŘÁ Č Á Ř Á úč ř č ě ů Ť é č ě š ř ž š é é š é é Ý ž š é ó ó ť š ž ů é Ť é ž é ů ú š ň ž ě š ž š é é ř š š ě š ó č é ů š ě ř š ť ť é ř ž ó ř š é Ť é ě š ř ě ř š ř ě ó é é ú ů Á ř é é é č š é ř ž ř
1.2.2 Síly II. Předpoklady: 1201
 1.. Síly II Předoklady: 101 Oakování z minulé hodiny: Pohyb a jeho změny zůobují íly. Pro každou ravou ílu můžeme najít: ůvodce (těleo, které ji zůobuje), cíl (těleo, na které íla ůobí), artnerkou ílu
1.. Síly II Předoklady: 101 Oakování z minulé hodiny: Pohyb a jeho změny zůobují íly. Pro každou ravou ílu můžeme najít: ůvodce (těleo, které ji zůobuje), cíl (těleo, na které íla ůobí), artnerkou ílu
Tlačné pružiny. Všechny rozměry pružin uvedených v katalogu jsou standardizovány. Také jsou zde uvedena potřebná technická data.
 Tlačné pružiny Všechny rozměry pružin uvedených v katalogu jsou standardizovány. Také jsou zde uvedena potřebná technická data. Každá pružina má své vlastní katalogové číslo. Při objednávce udávejte prosím
Tlačné pružiny Všechny rozměry pružin uvedených v katalogu jsou standardizovány. Také jsou zde uvedena potřebná technická data. Každá pružina má své vlastní katalogové číslo. Při objednávce udávejte prosím
ť Á ť Á ú ť Ň Ť ť Ý ů É É ů Ř ď Ú ď Ú Ť Ř Ó Č Č ů ú ú ď ů ď ů ď ď ď ů ú ť ů Ů ú Č Č Ó ď Ó ů Ý Č
 ď Ý úď ď ů Č Č Ů Č ď ů Ó ů Č Ó Č Č Č Ť ď ů Č Ú Č Ý Č ů Č Č ť ů ů ů ď ů Č Ů ů Č ů Ů Ů ů ť Ů ŤŘ Ě ů Ý ů ú Č Č Č Ů Č ď ďú Ů ÁČ Ř Ř Ř Č Ř Ť Ú Ř ť Č ť Á ť Á ú ť Ň Ť ť Ý ů É É ů Ř ď Ú ď Ú Ť Ř Ó Č Č ů ú ú ď ů
ď Ý úď ď ů Č Č Ů Č ď ů Ó ů Č Ó Č Č Č Ť ď ů Č Ú Č Ý Č ů Č Č ť ů ů ů ď ů Č Ů ů Č ů Ů Ů ů ť Ů ŤŘ Ě ů Ý ů ú Č Č Č Ů Č ď ďú Ů ÁČ Ř Ř Ř Č Ř Ť Ú Ř ť Č ť Á ť Á ú ť Ň Ť ť Ý ů É É ů Ř ď Ú ď Ú Ť Ř Ó Č Č ů ú ú ď ů
s p nazýváme směrový vektor přímky p, t je parametr bodu
 MATE ZS 2013 KONZ 3A Analytická geometrie lineárních útvarů v rovině a v rostoru Přímka v rovině 1 Parametrická rovnice římky v rovině: t R s o : X = A + t s, kde, Vektor s nazýváme směrový vektor římky,
MATE ZS 2013 KONZ 3A Analytická geometrie lineárních útvarů v rovině a v rostoru Přímka v rovině 1 Parametrická rovnice římky v rovině: t R s o : X = A + t s, kde, Vektor s nazýváme směrový vektor římky,
DOPLŇKOVÉ TEXTY BB01 PAVEL SCHAUER INTERNÍ MATERIÁL FAST VUT V BRNĚ TUHÉ TĚLESO
 DOPLŇKOÉ TXTY BB0 PAL SCHAUR INTRNÍ MATRIÁL FAST UT BRNĚ TUHÉ TĚLSO Tuhé těleso je těleso, o teé latí, že libovolná síla ůsobící na těleso nezůsobí jeho defoaci, ale ůže ít ouze ohybový účine. Libovolná
DOPLŇKOÉ TXTY BB0 PAL SCHAUR INTRNÍ MATRIÁL FAST UT BRNĚ TUHÉ TĚLSO Tuhé těleso je těleso, o teé latí, že libovolná síla ůsobící na těleso nezůsobí jeho defoaci, ale ůže ít ouze ohybový účine. Libovolná
Užitečné základní vzorce počítačové grafiky
 řenáš Vetorové oere Veliot vetoru Užitečné zální vzore očítčové rfi oučet vou vetorů lární oučin Vetorový oučin Litertur zroje: Žár, J., Beneš, B., Felel,.: Moerní očítčová rfi. Brno : Comuter re, 998.
řenáš Vetorové oere Veliot vetoru Užitečné zální vzore očítčové rfi oučet vou vetorů lární oučin Vetorový oučin Litertur zroje: Žár, J., Beneš, B., Felel,.: Moerní očítčová rfi. Brno : Comuter re, 998.
č á ž á ž ý ý Ú ď ě é ř ářž ž ý ř ůž ř š á ů ž é á é ř ť á ě á ž É ř á é ř ť éž ě é é ě ů ě č é ě á é éř ý ě ě š ý š ř é ě š š á ě šá á é á ň é á ž á
 ďť č á ž á ž ý ý Ú ď ě é ř ářž ž ý ř ůž ř š á ů ž é á é ř ť á ě á ž É ř á é ř ť éž ě é é ě ů ě č é ě á é éř ý ě ě š ý š ř é ě š š á ě šá á é á ň é á ž á é ž š ý ř ášý ě ý ů é é á é ěž ř ý á š ů ž ě š š
ďť č á ž á ž ý ý Ú ď ě é ř ářž ž ý ř ůž ř š á ů ž é á é ř ť á ě á ž É ř á é ř ť éž ě é é ě ů ě č é ě á é éř ý ě ě š ý š ř é ě š š á ě šá á é á ň é á ž á é ž š ý ř ášý ě ý ů é é á é ěž ř ý á š ů ž ě š š
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
 Á Ú Č ú ř ř ř ú ř ť Ú ň ž Á ď ž š ž ř ž É ž ř ž ú ř ú ú ž ť ř ň ú ď ť ť Ý š Ý Ě ž ž ť ď Ď ž ř ž ř š ž Ť ž ř Ú Ú ř ú ú ň ž ó ř ž ž š Ň ň ť ž ú š ž ž ž ž ř ř ž ř ř ř ř ž š ř Ý ň Á ó ú ř ť ú Č ř ú ž ť ř
Á Ú Č ú ř ř ř ú ř ť Ú ň ž Á ď ž š ž ř ž É ž ř ž ú ř ú ú ž ť ř ň ú ď ť ť Ý š Ý Ě ž ž ť ď Ď ž ř ž ř š ž Ť ž ř Ú Ú ř ú ú ň ž ó ř ž ž š Ň ň ť ž ú š ž ž ž ž ř ř ž ř ř ř ř ž š ř Ý ň Á ó ú ř ť ú Č ř ú ž ť ř
ž ť ř á ť ž ů ť ťů ů ť é ú á é ů š ř é ř é ář á ž ú ó ř é ň ž á ěř á á č ů ě ě š ř ů á á ě Ě ů ž á ěř á ť ó ř á ů é é á á úř ť á Ůř á š á ř ň á ž ť ť
 Á ůů úř áž ť ě á ě Č á Č č ž ý ř č Í ď Í áť ž é á ť ř č á ě č č ž ť ř á ť ž ů ť ťů ů ť é ú á é ů š ř é ř é ář á ž ú ó ř é ň ž á ěř á á č ů ě ě š ř ů á á ě Ě ů ž á ěř á ť ó ř á ů é é á á úř ť á Ůř á š á
Á ůů úř áž ť ě á ě Č á Č č ž ý ř č Í ď Í áť ž é á ť ř č á ě č č ž ť ř á ť ž ů ť ťů ů ť é ú á é ů š ř é ř é ář á ž ú ó ř é ň ž á ěř á á č ů ě ě š ř ů á á ě Ě ů ž á ěř á ť ó ř á ů é é á á úř ť á Ůř á š á
Godunovovy metody pro 1D-Eulerovy rovnice
 Godunovovy metody pro D-Eulerovy rovnice Řešte Eulerovy rovnice w t + f(w) w(0, t) = = o, x (0, l), t (0, T ), w(l, 0) w(x, 0) = w 0 (x), = 0, t (0, T ), x (0, l), w = (ϱ, ϱu, E) T, f(w) = (ϱu, ϱu + p,
Godunovovy metody pro D-Eulerovy rovnice Řešte Eulerovy rovnice w t + f(w) w(0, t) = = o, x (0, l), t (0, T ), w(l, 0) w(x, 0) = w 0 (x), = 0, t (0, T ), x (0, l), w = (ϱ, ϱu, E) T, f(w) = (ϱu, ϱu + p,
BH059 Tepelná technika budov Konzultace č. 2
 Vysoké učení technické v Brně Fakulta stavební Ústav ozemního stavitelství BH059 Teelná technika budov Konzultace č. 2 Zadání P6 zadáno na 2 konzultaci, P7 bude zadáno Průběh telot v konstrukci Kondenzace
Vysoké učení technické v Brně Fakulta stavební Ústav ozemního stavitelství BH059 Teelná technika budov Konzultace č. 2 Zadání P6 zadáno na 2 konzultaci, P7 bude zadáno Průběh telot v konstrukci Kondenzace
❷ s é 2s é í t é Pr 3 t str í. á rá. t r t í str t r 3. 2 r á rs ý í rá á 2 í P
 ❷ s é 2s é í t é Pr 3 t str í Úst 2 t t t r 2 2 á rá t r t í str t r 3 tí t 2 2 r á rs ý í rá á 2 í P ZADÁNÍ DIPLOMOVÉ PRÁCE I. OSOBNÍ A STUDIJNÍ ÚDAJE Příjmení: Hurský Jméno: Tomáš Fakulta/ústav: Fakulta
❷ s é 2s é í t é Pr 3 t str í Úst 2 t t t r 2 2 á rá t r t í str t r 3 tí t 2 2 r á rs ý í rá á 2 í P ZADÁNÍ DIPLOMOVÉ PRÁCE I. OSOBNÍ A STUDIJNÍ ÚDAJE Příjmení: Hurský Jméno: Tomáš Fakulta/ústav: Fakulta
Entropie (opičí tým) M možných výsledků (x 1, x 2, x M ) jak přiřadit pravděpodobnosti jednotlivým výsledkům?
 M možných výsledků (x 1, x 2, x M ) jak přiřadit pravděpodobnosti jednotlivým výsledkům?") ntroe (očí tým) možnýh výsledů (,, ) a řřadt ravděodobnost ednotlvým výsledům? aždou možnost rerezentueme rabí a náhodně do rab rozházíme mní ravděodobnost -tého výsledu: výsledem e -te ravděodobností:
ntroe (očí tým) možnýh výsledů (,, ) a řřadt ravděodobnost ednotlvým výsledům? aždou možnost rerezentueme rabí a náhodně do rab rozházíme mní ravděodobnost -tého výsledu: výsledem e -te ravděodobností:
Kinematika manipulátorů
 Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Kinematika manipulátorů 10. 9. 2011 Martin Švejda msvejda@kky.zcu.cz 1 Reprezentace obecného pohybu v robotice......................
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Kinematika manipulátorů 10. 9. 2011 Martin Švejda msvejda@kky.zcu.cz 1 Reprezentace obecného pohybu v robotice......................
č Ú Í ř
 č Ú ř ť á ě á é á ý ě ě é ů ě č ň ě ř é ú ř ž č ě ň ř á ě ě ě ř ů žý č ú ť ě ř ť á š šť č ž ý ů ů ň ě ř ě č é ř á ž ž ž ď š ě ň ů ú Ě é ř á ě ě ř ř ě ř á ý ý ú ř ěž ó ě ý ž ě ý ř ř á ě ě ř š ž š ř ú ý
č Ú ř ť á ě á é á ý ě ě é ů ě č ň ě ř é ú ř ž č ě ň ř á ě ě ě ř ů žý č ú ť ě ř ť á š šť č ž ý ů ů ň ě ř ě č é ř á ž ž ž ď š ě ň ů ú Ě é ř á ě ě ř ř ě ř á ý ý ú ř ěž ó ě ý ž ě ý ř ř á ě ě ř š ž š ř ú ý
Pohyby částic ve vnějším poli A) Homogenní pole. qb m. cyklotronová frekvence. dt = = 0. 2 ω PČ 1
 Homogenní pole. qb m. cyklotronová frekvence. dt = = 0. 2 ω PČ 1") Způsob popisu Pohb částic v poli vnějším Pohb částic v selfkonsistentním poli Kinetické rovnice Hdrodnamické rovnice * tekutin * 1 tekutina * magnetohdrodnamika Pohb částic ve vnějším poli A) Homogenní
Způsob popisu Pohb částic v poli vnějším Pohb částic v selfkonsistentním poli Kinetické rovnice Hdrodnamické rovnice * tekutin * 1 tekutina * magnetohdrodnamika Pohb částic ve vnějším poli A) Homogenní
ž ř áú č é ř č ř á ý é ř ýš ů á ý ě ž ť é á ě ý ě ý é ž řó é ý é ď ý č š é č š ž á é é á ýó č á ú ť č é ó óř č ý ý ě ž ů á ě š ě ž ý ř ě ň š ýš ž ý ž
 Á á ě á á ž ř áú č é ř č ř á ý é ř ýš ů á ý ě ž ť é á ě ý ě ý é ž řó é ý é ď ý č š é č š ž á é é á ýó č á ú ť č é ó óř č ý ý ě ž ů á ě š ě ž ý ř ě ň š ýš ž ý ž é ž é É ú á á ě é č ř á é ě ý ý ř ý á ý č
Á á ě á á ž ř áú č é ř č ř á ý é ř ýš ů á ý ě ž ť é á ě ý ě ý é ž řó é ý é ď ý č š é č š ž á é é á ýó č á ú ť č é ó óř č ý ý ě ž ů á ě š ě ž ý ř ě ň š ýš ž ý ž é ž é É ú á á ě é č ř á é ě ý ý ř ý á ý č
Ž ÚČ ť ň ž Ž Č ň Ť Š ě ěž ó š ěňž Ú ňť ť ň Č š ě š ě Č ň š ě ů ť ů ň ě ěž Ž ě š ž ě ě ě ú Ó Ó š ž ž
 Ů ú ě ě š Ú ú ů ú Ž ú ž ě Ž ě ě ú ě ů ě ň ú ú ú ě ě ů ú š ň Ž ň ž Ž ú ž ň ěž Ž ň Ú š ě ě ž ě š ů š ň ž ň Ž ě Ž ÚČ ť ň ž Ž Č ň Ť Š ě ěž ó š ěňž Ú ňť ť ň Č š ě š ě Č ň š ě ů ť ů ň ě ěž Ž ě š ž ě ě ě ú Ó
Ů ú ě ě š Ú ú ů ú Ž ú ž ě Ž ě ě ú ě ů ě ň ú ú ú ě ě ů ú š ň Ž ň ž Ž ú ž ň ěž Ž ň Ú š ě ě ž ě š ů š ň ž ň Ž ě Ž ÚČ ť ň ž Ž Č ň Ť Š ě ěž ó š ěňž Ú ňť ť ň Č š ě š ě Č ň š ě ů ť ů ň ě ěž Ž ě š ž ě ě ě ú Ó
- shodnost trojúhelníků. Věta SSS: Věta SUS: Věta USU:
 1/12 PLANIMETRIE Základní pojmy: Shodnost, podobnost trojúhelníků Středová souměrnost, osová souměrnost, posunutí, otočení shodná zobrazení Středový a obvodový úhel Obsahy a obvody rovinných obrazců 1.
1/12 PLANIMETRIE Základní pojmy: Shodnost, podobnost trojúhelníků Středová souměrnost, osová souměrnost, posunutí, otočení shodná zobrazení Středový a obvodový úhel Obsahy a obvody rovinných obrazců 1.
Ě ě é š Á Í ž ě Í á á ž ě š ř ň á ě é á á ě é ř á Í Í é ší á é á ě ť á ě ó á š ě č á č ó ÍÍ á ý á á ář é á é á ě ý ř ý á ř ř ě ó á Á š á á ž á ě ý á ž
 ě ň á ý ř á ší ář š ě ý ť é ě ů ě č č Í ě ž Ů ž é ý řž ý ý Ž ě š ý ů ě ř á ů čí Í Í š Í á á ě á é š ž ů č ř á ó á Í á ší ář Í á á á ě á řž ě řé é ě ů ří ě é Í š ž é ů ě ě ř ší ý á Í ž é á ě š ž ř Ů ě ó
ě ň á ý ř á ší ář š ě ý ť é ě ů ě č č Í ě ž Ů ž é ý řž ý ý Ž ě š ý ů ě ř á ů čí Í Í š Í á á ě á é š ž ů č ř á ó á Í á ší ář Í á á á ě á řž ě řé é ě ů ří ě é Í š ž é ů ě ě ř ší ý á Í ž é á ě š ž ř Ů ě ó
ěý í č Č Ě í í í č Č ě¾ í ú č á ř č í ú č Áí í í í í ú ří ř ¾ ó ř¹ í ¾ í é á áů á í ě á ú í ř í ú řě á í ú ě řýý Ě Ýč É Ř č č í
 ř Ň ť ť ř ť ó ú č í í á č í í í ó ó áí í í č í č á ú č Í ť ř á ý ¾ ěé ě ú č ¾ ý ú í ěý í č Č Ě í í í č Č ě¾ í ú č á ř č í ú č Áí í í í í ú ří ř ¾ ó ř¹ í ¾ í é á áů á í ě á ú í ř í ú řě á í ú ě řýý Ě Ýč
ř Ň ť ť ř ť ó ú č í í á č í í í ó ó áí í í č í č á ú č Í ť ř á ý ¾ ěé ě ú č ¾ ý ú í ěý í č Č Ě í í í č Č ě¾ í ú č á ř č í ú č Áí í í í í ú ří ř ¾ ó ř¹ í ¾ í é á áů á í ě á ú í ř í ú řě á í ú ě řýý Ě Ýč
É ň ú ú Č Ě ú ó Ú Ú Ť Ú ď Ú Š ó Ž Ž ú Ó Ž ó ň ú Š Š ú ť ú Ť
 É ť Č É ň ú ú Č Ě ú ó Ú Ú Ť Ú ď Ú Š ó Ž Ž ú Ó Ž ó ň ú Š Š ú ť ú Ť Ó ó Č ó Ž ú Š ú ú Ž ú ť Ž Š Ž ň Č ú ó Ž ú Ž Č Ž Ž Ž Ž ť Č Ž Ž ď Ž ó Ý Č Č ť ú ň Č ó ú Ž ť Ž ú ó Ý ň Č ó Ř ú ó ú ó ň ň ú ť ú ó ň ó ó Š ň
É ť Č É ň ú ú Č Ě ú ó Ú Ú Ť Ú ď Ú Š ó Ž Ž ú Ó Ž ó ň ú Š Š ú ť ú Ť Ó ó Č ó Ž ú Š ú ú Ž ú ť Ž Š Ž ň Č ú ó Ž ú Ž Č Ž Ž Ž Ž ť Č Ž Ž ď Ž ó Ý Č Č ť ú ň Č ó ú Ž ť Ž ú ó Ý ň Č ó Ř ú ó ú ó ň ň ú ť ú ó ň ó ó Š ň
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV INTELIGENTNÍCH SYSTÉMŮ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF INTELLIGENT SYSTEMS VLIV PŘESNOSTI
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMAČNÍCH TECHNOLOGIÍ ÚSTAV INTELIGENTNÍCH SYSTÉMŮ FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF INTELLIGENT SYSTEMS VLIV PŘESNOSTI
 γ α β E k r r ρ ρ 0 θ θ G Θ G U( r, t) w(z) w 0 ω z R z U( r, t) 1 c 2 2 U( r, t) t 2 = 0, U( r, t) U( r, t) = E( r, t) U( r, t) = u( r)e iωt. u( r) + k 2 u( r) = 0, k = ω/c u( r) = A exp( i k r), k
γ α β E k r r ρ ρ 0 θ θ G Θ G U( r, t) w(z) w 0 ω z R z U( r, t) 1 c 2 2 U( r, t) t 2 = 0, U( r, t) U( r, t) = E( r, t) U( r, t) = u( r)e iωt. u( r) + k 2 u( r) = 0, k = ω/c u( r) = A exp( i k r), k
Á ť ď ť ú é ý ý ý ů é ú Í ě ě ř ě Í é ý ě é š úř ž ýš é é ŕ ů é Í ř ě ř ý ř Ĺ ř Ž š é ý é é é ě š ě š ř ý ů Č ý ě é ě ň š ý ú é ú ů ý ů ý ů ň ř š ý úř
 đ Á ł ř ě é ě Ž é é ä łüł ŕ ł ř ľ ľľ ľľ ľľ Ż ě Ž Í ž ž ý Ž š úř ý é ý ř Í ý ý ý ý ů é ú š ě é ž ú Í ř ě ý ý Í ý ý ů ř ě ř Ž ž ě ř ě ů ý Ž ř ě Ž Ž é Í ý é Í ř ř ě Í é Í é ý ů ř ě ť ž ě é ě é ý ě é šž ř
đ Á ł ř ě é ě Ž é é ä łüł ŕ ł ř ľ ľľ ľľ ľľ Ż ě Ž Í ž ž ý Ž š úř ý é ý ř Í ý ý ý ý ů é ú š ě é ž ú Í ř ě ý ý Í ý ý ů ř ě ř Ž ž ě ř ě ů ý Ž ř ě Ž Ž é Í ý é Í ř ř ě Í é Í é ý ů ř ě ť ž ě é ě é ý ě é šž ř
SBÍRKA PŘÍKLADŮ Z MATEMATICKÉ ANALÝZY 3 Jiří Bouchala. Katedra aplikované matematiky, VŠB TU Ostrava jiri.bouchala@vsb.cz www.am.vsb.
 SBÍRKA PŘÍKLADŮ Z MATEMATICKÉ ANALÝZY 3 Jiří Bouchala Katedra aplikované matematiky, VŠB TU Ostrava jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala 2000 3 Předmluva Tato sbírka doplňuje přednášky z Matematické
SBÍRKA PŘÍKLADŮ Z MATEMATICKÉ ANALÝZY 3 Jiří Bouchala Katedra aplikované matematiky, VŠB TU Ostrava jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala 2000 3 Předmluva Tato sbírka doplňuje přednášky z Matematické
G( x) %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování
 %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování") Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
 ř ě ě ý ě ň ě ý ř ř ě ř ř ý ý ě ě ý ř ý ř ě ý ě ě ň ó ý ř ř ě ř ř ý ě ý ý ř ý ř ě ě ý ě ě ň š ř ě ř ř ý ě ý ě ý ř ý ř ě ě ý ě ě ň š ř ě ř ř ý ě ý ě ý ř ý ý ů ř ý ů ř úú ř ě ý ě š ě š ě š Š ý ř ě ř ř ý
ř ě ě ý ě ň ě ý ř ř ě ř ř ý ý ě ě ý ř ý ř ě ý ě ě ň ó ý ř ř ě ř ř ý ě ý ý ř ý ř ě ě ý ě ě ň š ř ě ř ř ý ě ý ě ý ř ý ř ě ě ý ě ě ň š ř ě ř ř ý ě ý ě ý ř ý ý ů ř ý ů ř úú ř ě ý ě š ě š ě š Š ý ř ě ř ř ý
 Ý Č Ý ú ů ů ú ň ú Ú ó é Ý ŘÉ É ÚČ ú Ú Ó ú Ů Ú š ú é é š š é Ú Ú ú Ú Č ž Č ň ú Ú Ú ž Ž ú é Ů Ů Ž Č Ž ď ú Á Ů ů é ž é Ú Ú ú š ž Č Ú š Č é ž Č ú Ú ú é š Ú Ú Ú Ú Č é Ú Ú Ú ú Ú Ú Č š ú š é ž é é é Ú ú š Ú ň
Ý Č Ý ú ů ů ú ň ú Ú ó é Ý ŘÉ É ÚČ ú Ú Ó ú Ů Ú š ú é é š š é Ú Ú ú Ú Č ž Č ň ú Ú Ú ž Ž ú é Ů Ů Ž Č Ž ď ú Á Ů ů é ž é Ú Ú ú š ž Č Ú š Č é ž Č ú Ú ú é š Ú Ú Ú Ú Č é Ú Ú Ú ú Ú Ú Č š ú š é ž é é é Ú ú š Ú ň
 Í ž š Ě Í š Ď Ť Í Ó ú ž š Ť š ž ž Ť Ť ž ž Ď Ď š š š š Ť ž ž š ž ň ž Ť š Ť ž š š š Ť ž ž ň š ž ž ž š ž ú ň š Ť Ť Ť Ť ž Í Ť ž ň ž š Ť Ť š š ž ň ž ň Ť ž š ž ž ž ž Ť Ť Í ž Š Í Í Ě Í Ř É É Í Ě ž ž ň š Ž ž ž
Í ž š Ě Í š Ď Ť Í Ó ú ž š Ť š ž ž Ť Ť ž ž Ď Ď š š š š Ť ž ž š ž ň ž Ť š Ť ž š š š Ť ž ž ň š ž ž ž š ž ú ň š Ť Ť Ť Ť ž Í Ť ž ň ž š Ť Ť š š ž ň ž ň Ť ž š ž ž ž ž Ť Ť Í ž Š Í Í Ě Í Ř É É Í Ě ž ž ň š Ž ž ž
Odpovědný projektant : Ing. Jiří Bilík. Vypracoval : Ing. Jiří Bilík. Investor : Město Karolinka Radniční náměstí 42, 756 05 Karolinka
 s t u d i e Hasičská zbrojnice stavební úpravy a přístavba, přeložka telekomunikačního kabelu, přeložka kabelu NN,přeložka veřejného osvětlení, vnitřní splaškové kanalizace, vnitřní kanalizace pro odvod
s t u d i e Hasičská zbrojnice stavební úpravy a přístavba, přeložka telekomunikačního kabelu, přeložka kabelu NN,přeložka veřejného osvětlení, vnitřní splaškové kanalizace, vnitřní kanalizace pro odvod
Jméno: P íjmení: Datum: 17. ledna 2018 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu.
: vadí mi vystavení mého hodnocení na internetu.") Jméno: P íjmení: Datum: 7. ledna 28 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu. Rotující nádoba Otev ená válcová nádoba napln ná do poloviny vý²ky
Jméno: P íjmení: Datum: 7. ledna 28 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu. Rotující nádoba Otev ená válcová nádoba napln ná do poloviny vý²ky
 ě úř š úř ř ú ď ě úř úř úř ň š ú ř ě Ž ě š ř ů é ú ř ř ž Ž ž ě ú ě ř š ě š ú ě ú ř ř ú ř ě ř ř š ř ď Č ú ď é ů ř ě š ž ř ď ě ř ř ř šť é ř š ě š ř ř š ř ř ř š é ř é ů ř ž ů ě š š é ě ů ěž é é ů ř ě é š
ě úř š úř ř ú ď ě úř úř úř ň š ú ř ě Ž ě š ř ů é ú ř ř ž Ž ž ě ú ě ř š ě š ú ě ú ř ř ú ř ě ř ř š ř ď Č ú ď é ů ř ě š ž ř ď ě ř ř ř šť é ř š ě š ř ř š ř ř ř š é ř é ů ř ž ů ě š š é ě ů ěž é é ů ř ě é š
 ó Á řř ů Ářř Ť Á Á ř š ř š ď ř š é é ď é ř ů ú ď ř ř ř ř ú š ř š ď š ď Č é ď ř ř ř ě ř é ř ě ě ř é ě é ř ř é ř é ě š ě š š ř é ě é é Ť ě š é é Š Š ď ě ř é é ř ó ř ř é ř ř é ř ě ř é ř ě š ř š ď š ř ď ř
ó Á řř ů Ářř Ť Á Á ř š ř š ď ř š é é ď é ř ů ú ď ř ř ř ř ú š ř š ď š ď Č é ď ř ř ř ě ř é ř ě ě ř é ě é ř ř é ř é ě š ě š š ř é ě é é Ť ě š é é Š Š ď ě ř é é ř ó ř ř é ř ř é ř ě ř é ř ě š ř š ď š ř ď ř
 É Ě ů Č ú Č ň ň Č Ť Ý ň ú ň ť ů ú ů ů ů ú ů ň Ě ú ň ů É Ň ú Ť ŤÁŇ ť ť Ť Ý Áň Ť Ý Ď Ď Á Ň Ť ů ň ú Ň ň ů ň ů ú Ý ú ů ú ť ů ů Á ť ú ň ů ů Ů ů Ý Ú ň ť Á Č Č ň É ť Á ť ť ň Ť Č Č Č ú É Ť ť ť Á Ť Ť ů ň Ú ů ť
É Ě ů Č ú Č ň ň Č Ť Ý ň ú ň ť ů ú ů ů ů ú ů ň Ě ú ň ů É Ň ú Ť ŤÁŇ ť ť Ť Ý Áň Ť Ý Ď Ď Á Ň Ť ů ň ú Ň ň ů ň ů ú Ý ú ů ú ť ů ů Á ť ú ň ů ů Ů ů Ý Ú ň ť Á Č Č ň É ť Á ť ť ň Ť Č Č Č ú É Ť ť ť Á Ť Ť ů ň Ú ů ť
š ě ú ě Á ŘÁ č
 š ě ú ě Á ŘÁ č ť ě ě Á Á š ř š ý ú ýě ř Ť ř ě ů ě ýč ě ý ž ú ů ě ě ú ů ž č ť ž ť ř ě ě ě ě ž č ž š š ě ů ř č š ě ž š ů ě ů ú š č č ů ěť ý š ě č š ě ý ú ů ř š ý ř ž ž ěř š ě ů ý ň ý ě ěř č ě ý ř č č ě ě
š ě ú ě Á ŘÁ č ť ě ě Á Á š ř š ý ú ýě ř Ť ř ě ů ě ýč ě ý ž ú ů ě ě ú ů ž č ť ž ť ř ě ě ě ě ž č ž š š ě ů ř č š ě ž š ů ě ů ú š č č ů ěť ý š ě č š ě ý ú ů ř š ý ř ž ž ěř š ě ů ý ň ý ě ěř č ě ý ř č č ě ě
2. Najděte funkce, které vedou s těmto soustavám normálních rovnic
 Zadání. Sestavte soustavu normálních rovnc ro funkce b b a) b + + b) b b +. Najděte funkce, které vedou s těmto soustavám normálních rovnc nb a) nb. Z dat v tabulce 99 4 4 b) určete a) rovnc regresní funkce
Zadání. Sestavte soustavu normálních rovnc ro funkce b b a) b + + b) b b +. Najděte funkce, které vedou s těmto soustavám normálních rovnc nb a) nb. Z dat v tabulce 99 4 4 b) určete a) rovnc regresní funkce
Sportovní hala - Náměstí Práce - U Zámku - Jižní Svahy-Kocanda
 Jízda historického trolejbusu Škoda Tr HT (r.v. 979) 7 7 8 8 9 9 7 9 7 Sportovní hala Platnost od.. do.. 7 8 9 7 8 9 >> dospělí...,- Kč Pro odbavení ve voze NELZE použít stávající jízdenky, časové >> děti
Jízda historického trolejbusu Škoda Tr HT (r.v. 979) 7 7 8 8 9 9 7 9 7 Sportovní hala Platnost od.. do.. 7 8 9 7 8 9 >> dospělí...,- Kč Pro odbavení ve voze NELZE použít stávající jízdenky, časové >> děti
$ x. $ z. divg # G. z divg + 0. rotg # G. Dt DT. x y. z y x z y
 t x, y, z t x F x, y, z, t # #,,, #,,, y F x y z t z F3 x y z t x y z u #, v #, w # t t t u x v y w z # t t t 3 #, # t t #, # # t u f x, y, z, t v f x, y, z, t w f3 x, y, z, t # # # u v w #, #, 3 # t t
t x, y, z t x F x, y, z, t # #,,, #,,, y F x y z t z F3 x y z t x y z u #, v #, w # t t t u x v y w z # t t t 3 #, # t t #, # # t u f x, y, z, t v f x, y, z, t w f3 x, y, z, t # # # u v w #, #, 3 # t t
ž ř ž ůž ř ř ď ž ř ů ř ř ř ř ů ž ř ů ů ů ů ó ú ú ř ř ř ů ř ž ů ř ž ůž ř ž ř ž ž ř ř ž ř ž ř ů ú ř ů ů ž
 ť ň ť ů ů ž ů řů ž ř ž ůž ř ř ď ž ř ů ř ř ř ř ů ž ř ů ů ů ů ó ú ú ř ř ř ů ř ž ů ř ž ůž ř ž ř ž ž ř ř ž ř ž ř ů ú ř ů ů ž ř ř ž Š ž ž ž ž ř ž ů ř ó ú ř ů ů ř ř ř ž ú ř ř ř ř ř ů ů ř ř ř ř ř ř ř ř ř ž ř
ť ň ť ů ů ž ů řů ž ř ž ůž ř ř ď ž ř ů ř ř ř ř ů ž ř ů ů ů ů ó ú ú ř ř ř ů ř ž ů ř ž ůž ř ž ř ž ž ř ř ž ř ž ř ů ú ř ů ů ž ř ř ž Š ž ž ž ž ř ž ů ř ó ú ř ů ů ř ř ř ž ú ř ř ř ř ř ů ů ř ř ř ř ř ř ř ř ř ž ř
a) vedecky a pedagogicky alebo umelecky a pedagogicky pôsobí v danom študijnom
 vedecky a pedagogicky alebo umelecky a pedagogicky pôsobí v danom študijnom") Kritériá na habilitácie docentov a kritériá na vymenovanie profesorov Slovenskej technickej univerzity v Bratislave podľa, článok, písm. e) zákona č. 3/00 Z. z. Podľa zákona 3/00 Zb. z. čl. 76: vedecko-pedagogický
Kritériá na habilitácie docentov a kritériá na vymenovanie profesorov Slovenskej technickej univerzity v Bratislave podľa, článok, písm. e) zákona č. 3/00 Z. z. Podľa zákona 3/00 Zb. z. čl. 76: vedecko-pedagogický
É Ý ú ů Č ů Š ú ú ó Ž ů Ž Ž ů ů ů ú ů ň ů Ú ť ó ň ň Ó ů Ú ó ó ó ň Š ó ň ó Ó ú ňó ó ď Ě ó ú Ý ď ó ó ó Ú ó ň ó ů ů Ť ó ó ó
 Ř Ž ů ů Č É Ý ú ů Č ů Š ú ú ó Ž ů Ž Ž ů ů ů ú ů ň ů Ú ť ó ň ň Ó ů Ú ó ó ó ň Š ó ň ó Ó ú ňó ó ď Ě ó ú Ý ď ó ó ó Ú ó ň ó ů ů Ť ó ó ó ď ť É Ž ó Ž Ž Á ó ú Ž ů Ž Ý ó Ž ů ů ů ť Ý ů ó ť ů Ž ú ů ů ů ó ú ó ů Ž
Ř Ž ů ů Č É Ý ú ů Č ů Š ú ú ó Ž ů Ž Ž ů ů ů ú ů ň ů Ú ť ó ň ň Ó ů Ú ó ó ó ň Š ó ň ó Ó ú ňó ó ď Ě ó ú Ý ď ó ó ó Ú ó ň ó ů ů Ť ó ó ó ď ť É Ž ó Ž Ž Á ó ú Ž ů Ž Ý ó Ž ů ů ů ť Ý ů ó ť ů Ž ú ů ů ů ó ú ó ů Ž
Mikrovlny. Karolína Kopecká, Tomáš Pokorný, Jan Vondráček, Ondřej Skowronek, Ondřej Jelínek
 Mikrovlny Karolína Kopecká, Tomáš Pokorný, Jan Vondráček, Ondřej Skowronek, Ondřej Jelínek Mikrovlny e le k tro m a g n e tic k é z á ře n í fre k v e n c e 3 0 0 M H z - 3 0 0 G H z v ln o v á d é lk
Mikrovlny Karolína Kopecká, Tomáš Pokorný, Jan Vondráček, Ondřej Skowronek, Ondřej Jelínek Mikrovlny e le k tro m a g n e tic k é z á ře n í fre k v e n c e 3 0 0 M H z - 3 0 0 G H z v ln o v á d é lk
11. cvičení z Matematické analýzy 2
 11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
 Ř Í Š Š Č Ť š é é ž é é é Ť š ť Ť ť ž ž Ť Ť š Í Ť Ž č é č č ž é č ž Ť š Ť Ď ž ž é ž Í č ň é Ť ž é é é Č č ž ž ř ž š š č č š ď Ž Č Ť é é Ť č é ž é ž é é é Ť ž ň š Ť Ž č š ž Č é č é š é é Ť Ž é č č š š é
Ř Í Š Š Č Ť š é é ž é é é Ť š ť Ť ť ž ž Ť Ť š Í Ť Ž č é č č ž é č ž Ť š Ť Ď ž ž é ž Í č ň é Ť ž é é é Č č ž ž ř ž š š č č š ď Ž Č Ť é é Ť č é ž é ž é é é Ť ž ň š Ť Ž č š ž Č é č é š é é Ť Ž é č č š š é
 Í ď ď É Ú ď ď ď ť č ů ú č ň ř ň ě ř ď č č Ř ě ž ž ů č ě ž ř ž ř č ě ň žá ě ď ě ů ů óů ž ů č Ř ň č ů ž č ů ů ě ú ě ě ř ě č ů Č ň ň ř ů úř ž ž ů ě ř ů ž ě ž ů č ů ů ž Č ř ř č ž ů ž ř ě č ú ě ě ž ě ě ž Č
Í ď ď É Ú ď ď ď ť č ů ú č ň ř ň ě ř ď č č Ř ě ž ž ů č ě ž ř ž ř č ě ň žá ě ď ě ů ů óů ž ů č Ř ň č ů ž č ů ů ě ú ě ě ř ě č ů Č ň ň ř ů úř ž ž ů ě ř ů ž ě ž ů č ů ů ž Č ř ř č ž ů ž ř ě č ú ě ě ž ě ě ž Č
ý Í č ší í ě í ů ý í ě á íó í í á ě í ě í š í ť é ř š ě Í é é Í á í ří í íř í íž í í í í ů ží í ý í ů í ší ěá Í á é á í í ě ě í ó ý ý í í í ť í á ší í
 ý Í č š ě ů ý ě á ó á ě ě š ť é ř š ě Í é é Í á ř ř ž ů ž ý ů š ěá Í á é á ě ě ó ý ý ť á š ě ž é é č Á ž á Í ř Ě ó é ř á ú Í ě ý é ě š č ý Í ě ř ů ě ú ň Í ť é ě ě š Ě ó á ř č ě ó ů ř ř á Íř ží ř ě č ě
ý Í č š ě ů ý ě á ó á ě ě š ť é ř š ě Í é é Í á ř ř ž ů ž ý ů š ěá Í á é á ě ě ó ý ý ť á š ě ž é é č Á ž á Í ř Ě ó é ř á ú Í ě ý é ě š č ý Í ě ř ů ě ú ň Í ť é ě ě š Ě ó á ř č ě ó ů ř ř á Íř ží ř ě č ě
FYZIKA 2. ROČNÍK. Změny skupenství látek. Tání a tuhnutí. Pevná látka. soustava velkého počtu částic. Plyn
 Zěny skuenství látek Pevná látka Kaalina Plyn soustava velkého očtu částic Má-li soustava v rovnovážné stavu ve všech částech stejné fyzikální a cheické vlastnosti (stejnou hustotu, stejnou strukturu a
Zěny skuenství látek Pevná látka Kaalina Plyn soustava velkého očtu částic Má-li soustava v rovnovážné stavu ve všech částech stejné fyzikální a cheické vlastnosti (stejnou hustotu, stejnou strukturu a
Stabilita prutu, desky a válce vzpěr (osová síla)
") Stabilita rutu, deky a válce vzěr (oová íla) Průběh ro ideálně římý rut (teoretický tav) F δ F KRIT Průběh ro reálně římý rut (reálný tav) 1 - menší očáteční zakřivení - větší očáteční zakřivení F Obr.1
Stabilita rutu, deky a válce vzěr (oová íla) Průběh ro ideálně římý rut (teoretický tav) F δ F KRIT Průběh ro reálně římý rut (reálný tav) 1 - menší očáteční zakřivení - větší očáteční zakřivení F Obr.1
2
 2 4 5 6 7 8 9 1 2 4 4 1 2 10 11 1 2 4 4 1 2 7241B 12 1 1 2 4 4 2 1 14 15 1 2 4 4 1 2 7241B 16 17 1 2 4 4 1 2 18 19 1 2 4 4 1 2 20 21 1 2 4 4 2 1 22 2 1 2 4 4 1 2 7241B 24 25 1 2 4 4 1 2 26 27 1 2 4 4
2 4 5 6 7 8 9 1 2 4 4 1 2 10 11 1 2 4 4 1 2 7241B 12 1 1 2 4 4 2 1 14 15 1 2 4 4 1 2 7241B 16 17 1 2 4 4 1 2 18 19 1 2 4 4 1 2 20 21 1 2 4 4 2 1 22 2 1 2 4 4 1 2 7241B 24 25 1 2 4 4 1 2 26 27 1 2 4 4
 ž ž ýš ř ř Ť ý ž ň ť ť Ď Ť Ť š Ť Ť ň Ť Ň Ť š ž š Ť š Ť Ť ť Ť Ť Ť ž š Ť Š Ť ť š Ě Ě ť š š Ď ť ť ť š Ř Š Ě š Č Ř Ř ť Š Ř Ř Ě Ř Á Ť Ř Ě Ř Á ť š š š ť ť Šť š Š š ť ř ž š ř ř ž ř ý ř ř ž ď ž ň ž ž ř ž ř ř ž
ž ž ýš ř ř Ť ý ž ň ť ť Ď Ť Ť š Ť Ť ň Ť Ň Ť š ž š Ť š Ť Ť ť Ť Ť Ť ž š Ť Š Ť ť š Ě Ě ť š š Ď ť ť ť š Ř Š Ě š Č Ř Ř ť Š Ř Ř Ě Ř Á Ť Ř Ě Ř Á ť š š š ť ť Šť š Š š ť ř ž š ř ř ž ř ý ř ř ž ď ž ň ž ž ř ž ř ř ž
 Á Ú š ě ý ň šť ž ě Ž ý ě ě ť ý š ě š Í Í ý Í ě ž ý ž š ý Í ý ý š ď š š ž š š š ě ý š ě š š Í š ň ď š ě ě Í š ě Í ď š ě ý ž š ě ý ý ý ě ů ů ů ý ě ů ž ý ě ě ý ů ý ů ý ý Í š š ě ů š ě ě š ě Ú š ě ýš ě ě ý
Á Ú š ě ý ň šť ž ě Ž ý ě ě ť ý š ě š Í Í ý Í ě ž ý ž š ý Í ý ý š ď š š ž š š š ě ý š ě š š Í š ň ď š ě ě Í š ě Í ď š ě ý ž š ě ý ý ý ě ů ů ů ý ě ů ž ý ě ě ý ů ý ů ý ý Í š š ě ů š ě ě š ě Ú š ě ýš ě ě ý
Uvod k pocatecnimu problemu pro obycejne diferencialni
 Uvod k pocatecnimu problemu pro obycejne diferencialni rovnice Budeme resit ulohu mnozeni bakterii. Na zacatku mame jedinou bakterii a vime, ze za urcity cas se takova bakterii rozmnozi na 2. Zajima nas
Uvod k pocatecnimu problemu pro obycejne diferencialni rovnice Budeme resit ulohu mnozeni bakterii. Na zacatku mame jedinou bakterii a vime, ze za urcity cas se takova bakterii rozmnozi na 2. Zajima nas
Zadání semestrální práce z předmětu Mechanika 2
 Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu
Zadání semestrální práce z předmětu Mechanika 2 Jméno: VITALI DZIAMIDAU Číslo zadání: 7 U zobrazeného mechanismu definujte rozměry, hmotnosti a silové účinky a postupně proveďte: 1. kinematickou analýzu