VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
|
|
|
- Aneta Matoušková
- před 6 lety
- Počet zobrazení:
Transkript
1 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION ÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ DEPARTMENT OF BIOMEDICAL ENGINEERING SEGMENTACE MEDICÍNSKÝCH OBRAZŮ S VYUŽITÍM GRAFOVÉ REPREZENTACE MEDICAL IMAGE SEGMENTATION BASED ON GRAPH CUT WITH SHAPE PRIOR BAKALÁŘSKÁ PRÁCE BACHELOR'S THESIS AUTOR PRÁCE AUTHOR Dominika Kozlová VEDOUCÍ PRÁCE SUPERVISOR Ing. Roman Jakubíček BRNO 2016
2 Bakalářská práce bakalářský studijní obor Biomedicínská technika a bioinformatika Ústav biomedicínského inženýrství Studentka: Dominika Kozlová ID: Ročník: 3 Akademický rok: 2015/16 NÁZEV TÉMATU: Segmentace medicínských obrazů s využitím grafové reprezentace POKYNY PRO VYPRACOVÁNÍ: 1) Seznamte se s problematikou zpracování obrazů, zejména segmentace. Prostudujte segmentační metody založené na grafové reprezentaci. 2) Zpracujte literární rešerši na danou problematiku. Obzvláště se zaměřte na grafové metody segmentace a návrhy její architektury s využitím znalosti o tvaru segmentovaného objektu. 3) Navrhněte vhodné postupy pro vytvoření architektury grafu na základě znalosti segmentovaného obrazu. 4) Realizujte a ověřte metodu grafové segmentace v programovém prostředí Matlab na simulovaných datech. 5) Otestujte segmentační metodu na reálných medicínských CT datech. 6) Diskutujte dosažené výsledky a možné využití této metody (square graph-cut ) v oblasti zpracování medicínských obrazů. DOPORUČENÁ LITERATURA: [1] LÉZORAY, O., GRADY, L. J. Image processing and analysis with graph: theory and practice. Boca Raton: CRC Press, c2012, 537 s. ISBN [2] EGGER, Jan, Tina KAPUR, Thomas DUKATZ, Malgorzata KOLODZIEJ, Dženan ZUKIĆ, Bernd FREISLEBEN a Christopher NIMSKY. Square-Cut: A Segmentation Algorithm on the Basis of a Rectangle Shape. PLoS ONE [online]. 2012, roč. 7, č. 2, s. e Termín zadání: Termín odevzdání: Vedoucí práce: Ing. Roman Jakubíček Konzultant bakalářské práce: prof. Ing. Ivo Provazník, Ph.D., předseda oborové rady UPOZORNĚNÍ: Autor bakalářské práce nesmí při vytváření bakalářské práce porušit autorská práva třetích osob, zejména nesmí zasahovat nedovoleným způsobem do cizích autorských práv osobnostních a musí si být plně vědom následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., včetně možných trestněprávních důsledků vyplývajících z ustanovení části druhé, hlavy VI. díl 4 Trestního zákoníku č.40/2009 Sb. Fakulta elektrotechniky a komunikačních technologií, Vysoké učení technické v Brně / Technická 3058/10 / / Brno
3 ABSTRAKT Tato práce se zabývá grafovou metodou segmentace obrazu a jejím zdokonalením prostřednictvím znalosti tvaru objektu pro tvorbu architektury grafu (šablony). Popsány jsou základy teorie grafů, ze které grafové segmentační metody vychází. Navržený segmentační algoritmus byl realizován ve 2D provedení s grafickým uživatelským prostředím v MATLABu. Pro segmentaci objemových dat byla metoda rozšířena do 3D. Implementovaná metoda byla testována na simulovaných datech a na reálných CT a MRI snímcích obratlů a mozku. Získané výsledky byly zhodnoceny a porovnány s původní grafovou metodou bez využití šablony. KLÍČOVÁ SLOVA Segmentace obrazu, Teorie grafů, Řez grafem, Šablona ABSTRACT This thesis deals with a graph-based image segmentation and its improvement by using the information about the shape of the object for creating specific graph architecture (template). There are described basics of the graph theory, which is the basis of the graph segmentation methods. Designed segmentation algorithm was realized in 2D with graphical user interface in MATLAB. For segmentation of volume data, the method was extended into 3D. Implemented method was tested on simulated data and on real CT and MRI images of vertebra and brain. Obtained results were evaluated and compared with the original method without using the template. KEYWORDS Image segmentation, Graph Theory, Graph Cut, Template KOZLOVÁ, D. Segmentace medicínských obrazů s využitím grafové reprezentace. Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, s. Vedoucí bakalářské práce Ing. Roman Jakubíček.
4 PROHLÁŠENÍ Prohlašuji, že svou bakalářskou práci na téma Segmentace medicínských obrazů s využitím grafové reprezentace jsem vypracovala samostatně pod vedením vedoucího bakalářské práce a s použitím odborné literatury a dalších informačních zdrojů, které jsou všechny citovány v práci a uvedeny v seznamu literatury na konci práce. Jako autorka uvedené bakalářské práce dále prohlašuji, že v souvislosti s vytvořením této bakalářské práce jsem neporušila autorská práva třetích osob, zejména jsem nezasáhla nedovoleným způsobem do cizích autorských práv osobnostních a/nebo majetkových a jsem si plně vědoma následků porušení ustanovení 11 a následujících autorského zákona č. 121/2000 Sb., o právu autorském, o právech souvisejících s právem autorským a o změně některých zákonů (autorský zákon), ve znění pozdějších předpisů, včetně možných trestněprávních důsledků vyplývajících z ustanovení části druhé, hlavy VI. díl 4 Trestního zákoníku č. 40/2009 Sb. Brno (podpis autora)
5 PODĚKOVÁNÍ Ráda bych poděkovala vedoucímu bakalářské práce panu Ing. Romanu Jakubíčkovi za odborné vedení, konzultace, ochotu a cenné rady k práci. Brno (podpis autora)
6 Obsah Úvod Teorie grafů Váhovaný graf Orientovaný a směrovaný graf Zdrojová a cílová funkce Cesty a konektivita Nejkratší cesta grafu Stromy a minimální kostra grafu Síť a tok grafem Řez grafem Realizace segmentačního algoritmu Vytvoření grafu Tvorba šablony Segmentační energie Regionální vlastnosti Hraniční vlastnosti S-t řez Realizace ve 3D Tvorba šablony krychle Tvorba 3D šablony dle binární předlohy Grafické uživatelské prostředí Výsledky Testování na simulovaných datech Obdélník Pětiúhelník Hvězda Testování na reálných datech Segmentace obratlů Segmentace snímků mozku... 40
7 5.3 Testování 3D dat Závěr Literatura... 46
8 Úvod Segmentace patří k základním krokům obrazové analýzy. Obraz je pomocí segmentace rozdělen do vymezených oblastí se společnými vlastnostmi, které se nepřekrývají a společně pokrývají celou oblast obrazu. Vzniklé segmenty představují jednotlivé objekty separované od pozadí v obraze. Výsledkem segmentace je pak obraz s vyznačenými oblastmi segmentů, například barevně či indexy. Segmentace obrazových dat je využívána k detekci a klasifikaci objektů. U medicínských obrazů získaných pomocí zobrazovacích systémů, jako je počítačová tomografie či magnetická rezonance, přispívá segmentace dat ke stanovení diagnózy. Využívá se zejména pro rozlišení různých typů tkání, 3D modelování a vizualizaci struktur, jako jsou orgány, kosti, cévy i různé patologie. Publikováno bylo již velké množství různých segmentačních technik vhodných u různých situací. Metody lze rozdělit dle určitých společných znaků do několika oblastí. Některé jsou aplikovány globálně na celý obraz, jiné fungují lépe pouze lokálně na předdefinovaných místech obrazu. Mezi hlavní oblasti segmentačních metod patří kategorie podle homogenity oblastí (př. prahování), metody založené na detekci hran (př. Houghova transformace), regionově orientované techniky (př. metoda rozvodí a metoda dělení a spojování oblastí) a segmentace dle porovnání vzorů [1]. Během posledních let hrají důležitou roli v segmentaci obrazů postupy vycházející z teorie grafů, kdy je obraz převeden na jeho grafovou reprezentaci. Právě segmentací využívající grafovou reprezentaci obrazu a jejím zdokonalením pomocí začlenění informace o tvaru objektu se zabývá tato práce. O základech teorie grafů, ze které grafové segmentační metody vychází, pojednává následující kapitola. Ve druhé kapitole je popsána realizace segmentačního algoritmu, konkrétně je vysvětlena tvorba grafu z obrazových dat s využitím znalosti tvaru objektu, dále segmentační energie a provedení řezu grafem. Implementovaná metoda byla také rozšířena do 3D pro segmentaci objemových dat, o čemž pojednává kapitola třetí. Dále bylo pro snadnou interakci uživatele s programem pro 2D segmentaci vytvořeno grafické uživatelské prostředí, popsané v kapitole čtvrté. Realizovaný algoritmus byl testován na simulovaných datech i reálných snímcích obratlů a mozku. Výsledky těchto segmentací jsou uvedeny a diskutovány v páté kapitole. 8

9 1 Teorie grafů Grafy jsou struktury v matematice s dlouhou historií, které již byly aplikovány v mnoha vědeckých i technických oblastech a informatice. Dále jsou popsány a vysvětleny základní pojmy nutné pro práci s teorií grafů a její využití. Grafy představují množinu prvků a párových vztahů mezi těmito prvky. Graf je tedy dvojice množin G = (V, E), kde V představuje množinu uzlů (též vrcholů) a E vztahy mezi nimi, množinu hran. Každá hrana je podmnožinou všech možných dvojic navzájem různých vrcholů E V V [2]. V obrazu odpovídají uzly v V obrazovým pixelům (nebo voxelům) a hrany e i,j E korespondují se zvoleným systémem propojení sousedních pixelů [3]. Graf reprezentující obraz se 4 pixely lze vidět na Obr. 1.1, kde jsou uzly znázorněny modrými kruhy a hrany modrými čarami, které je spojují. 1.1 Váhovaný graf Obr. 1.1: Příklad grafu (modře) reprezentující obraz se 4 pixely (šedě) Každý graf může být váhovaný. Váhování vrcholů grafu je funkce w : V R a váhování hran funkce w: E R. Pro zjednodušení zápisu se používá pro váhu uzlu značení w i nebo w(v i ) a pro váhu hrany spojující dva uzly označení w i,j nebo w(v i, v j ), kde i, j značí pořadí uzlů v daném grafu. Pokud není váhování specifikováno, všechny váhy uzlů a hran jsou považovány za rovny jedné. V případě, že je váha hrany rovna nule, hrana nepatří do množiny hran daného grafu [2]. Váhy hran mohou být využity pro reprezentaci afinit daných uzlů k objektu zájmu, vzdáleností mezi uzly a podobně. Lze si je představit i jako cenu, kterou je nutné zaplatit za průchod danou hranou [3]. 1.2 Orientovaný a směrovaný graf V grafu je každá hrana orientovaná, některé hrany jsou navíc směrované. Orientace hrany znamená, že hrana obsahuje stanovené pořadí uzlů. Hrana je směrovaná, pokud váhování v jednom směru hrany neodpovídá jejímu váhování ve směru opačném, tedy w i,j w j,i. Graf, 9

10 ve kterém je alespoň jedna hrana směrována, je nazýván směrovaný (directed) graf. V opačném případě, kdy w i,j = w j,i se graf nazývá nesměrovaný (undirected). Směrovaný graf je více obecný, a tudíž všechny jeho algoritmy mohou být použity i pro nesměrované, ale naopak nikoli. Orientace hrany nesměrovaného grafu bývá značena šipkou, jak je znázorněno na Obr. 1.2 a slouží k určení znaménka toku touto hranou. Například průtok proudu z uzlu v i do uzlu v j je kladný a z uzlu v j do uzlu v i záporný. V tomto smyslu je proud směrovanou hranou obvykle kladný [2]. 1.3 Zdrojová a cílová funkce Obr. 1.2: Příklad grafu (a) neorientovaný (b) orientovaný Zvažujeme dvě funkce s, t: E V, kde s je zdrojová funkce (source) a t představuje cílovou funkci (target). Hrana e i,j = (v i, v j ) E má počátek s(e i,j ) = v i, též zdroj a koncový bod t(e i,j ) = v j, neboli stok (spotřebič). U hrany e k E jsou vrcholy s(e k ) a t(e k ) nazývány hranice hrany e k a výraz t(e k ) s(e k ) je mez hrany e k. Obecně může mít graf více zdrojů a stoků, v dalším textu je však uvažován pouze jeden zdroj a stok grafu [2]. 1.4 Cesty a konektivita Grafy utvářejí vztahy mezi uzly, které umožňují definovat, zda jsou dva uzly spojeny řadou párových vztahů. Sled (walk, chain) z vrcholu v i do v j je daná posloupnost uzlů π(v 1, v n ) spojených hranami. Může obsahovat i více opakování jednoho uzlu či hrany. Jestliže je počáteční bod roven koncovému v i = v j, pak je sled uzavřený. Sled se nazývá tah (trail), pokud se v něm každá hrana vyskytuje pouze jednou. Otevřený sled je cesta (path), v případě, že se v něm pouze jednou nachází každý uzel. Uzavřený tah tvoří kružnici (circuit). Kružnice je nazývána cyklus (cycle), pokud jsou všechny její uzly rozdílné. Dva uzly jsou propojené, pokud existuje sled těchto uzlů, tedy π(v i, v j ) nebo π(v j, v i ). Pokud se v grafu vyskytuje alespoň jeden sled uzlů, nazývá se propojený. Dva 10
![uzly jsou propojeny silně, pokud π(v i, v j ) i π(v j, v i ), tedy pokud mezi nimi existuje sled bodů v jednom i v opačném směru. V nesměrovaném grafu jsou tedy všechny uzly propojené silně [2].](/docs-images/91/106378066/images/11-0.jpg "Na Obr. 1.3 je znázorněn sled, tah a cesta v propojeném grafu. Obr. 1.3: Znázornění propojeného grafu: sled (modře), tah a cesta (černě) 1.")
11 uzly jsou propojeny silně, pokud π(v i, v j ) i π(v j, v i ), tedy pokud mezi nimi existuje sled bodů v jednom i v opačném směru. V nesměrovaném grafu jsou tedy všechny uzly propojené silně [2]. Na Obr. 1.3 je znázorněn sled, tah a cesta v propojeném grafu. Obr. 1.3: Znázornění propojeného grafu: sled (modře), tah a cesta (černě) 1.5 Nejkratší cesta grafu Směrování v grafech, zejména hledání nejkratší cesty, patří mezi nejstarší a nejběžnější problémy v oblasti teorie grafů. Výpočet nejkratší cesty je třeba u počítačového zobrazování pro interaktivní obrazovou segmentaci. Uvažujeme-li váhovaný graf G = (V, E) s váhovou funkcí w nabývající reálných hodnot pro každou hranu, potom je celková váha sledu uzlů l(π(v i, v j )) dána součtem vah w(e k ) všech hran patřících tomuto sledu π(v i, v j ). Dle konvence je délka (tj. váha) cesty rovna nekonečnu, pokud uzly v i, v j nejsou spojeny a celková váha sledu l(π(v i, v j )) je pak rovna nule. Minimální délka mezi dvěma uzly je získána pomocí minima celkové váhy sledu. Sled s minimální vzdáleností je nazýván nejkratší cesta (shortest path), která nemusí být jen jedna. Pro výpočet nejkratší cesty mohou být použity různé algoritmy pro různé situace, například pro její hledání z jednoho uzlu ke všem zbylým (např. Djikstrův algoritmus) nebo pro cestu mezi všemi páry uzlů [2]. 1.6 Stromy a minimální kostra grafu Strom je nesměrovaný propojený graf bez cyklů, u něhož odstranění jakékoli hrany vede k rozpojení grafu a vytvoření nové hrany vede k utvoření cyklu. Částečný graf propojeného grafu se nazývá kostra grafu. Existuje alespoň jedna kostra pro každý propojený graf, a pokud navíc minimalizuje cenu (váhy) grafu, nazývá se minimální kostra grafu (minimum spanning trees). Pro řešení problému minimální kostry grafu existuje několik algoritmů, například Primův algoritmus, který začíná od hrany s minimální hodnotou vah a iterativně přidává 11

12 do stromu hrany s minimálními vahami mezi všemi možnými hranami pro zachování necyklického stromu. Hledání minimální kostry grafu je využíváno například pro obrazové segmentace a hierarchickou reprezentaci obrazu [2]. 1.7 Síť a tok grafem Transportní síť je uspořádaná pětice (V, E, s, t, c), kde (V, E) je váhovaný orientovaný graf, u kterého existuje jeden počáteční uzel s V, nazývaný zdroj (source), kterému žádný uzel nepředchází a jeden koncový uzel t V, nazývaný stok (sink), po kterém žádný uzel nenásleduje [4]. Nezáporná váha směrované hrany e i,j se nazývá kapacita hrany c(e i,j ). A + (v i ) = { e i,j E} značí množinu dovnitř směrovaných hran do bodu v i a obdobně A (v i ) = { e i,j E} značí množinu hran směřujících z bodu v i ven. V grafu musí existovat alespoň jedna cesta ze zdroje do stoku. Funkce φ: E R + se nazývá tok sítě, pokud každý uzel v i { v s, v t } splňuje zachování podmínky, že výsledný součet proudů v uzlu je nulový (viz následující rovnice), též zvanou jako Kirchhoffův zákon proudu [2]. e j,i φ(e j,i ) e i,j φ(e i,j ) = 0 (1.1) Tok hranou je množství, které je hranou právě přenášeno. Tok dané hrany musí být menší než kapacita hrany c(e), zároveň nesmí nabývat záporných hodnot. Rezerva hrany značí, kolik kapacity hrany zbývá, neboli jaké množství by mohlo hranou ještě protékat. Tok v uzlech nevzniká ani nezaniká, ztráty v uzlech se tedy neuvažují. Velikost toku v celém grafu je rovna součtu toků ze zdroje do stoku. Cílem je zajistit maximální tok ze zdroje do stoku, ne naplnit celou síť. Na Obr. 1.4 je znázorněn příklad sítě s tokem, různě barevnými šipkami jsou zobrazeny možné cesty ze zdroje s do stoku t. Hrany jsou značeny hodnotou toku před lomítkem a kapacitou hrany za lomítkem. Obr. 1.4: Tok sítí a možné cesty grafem (černě, světle a tmavě modře) 12
![Základní problém, který je řešen při segmentaci, je hledání toku co největší velikosti, které může být dosaženo, tedy maximálního toku (max flow) [4].](/docs-images/91/106378066/images/13-0.jpg "Pro jeho výpočet slouží například Fordův-Fulkersonův algoritmus (viz Ford-Fulkerson algoritm [5]). 1.")
13 Základní problém, který je řešen při segmentaci, je hledání toku co největší velikosti, které může být dosaženo, tedy maximálního toku (max flow) [4]. Pro jeho výpočet slouží například Fordův-Fulkersonův algoritmus (viz Ford-Fulkerson algoritm [5]). 1.8 Řez grafem Dle terminologie je s-t řez podmnožinou hran C E, jejichž odstranění rozdělí uzly do dvou podmnožin S a T. Řezem tedy vznikají dvě podmnožiny vrcholů patřících buď ke zdroji, nebo ke stoku [2]. U segmentace obrazu je řez jeho grafem využíván pro rozdělení uzlů zastupujících pixely do množiny přiřazené ke zdroji, který reprezentuje objekt a ke stoku, který představuje pozadí obrazu. Řezem jsou tedy získány hranice segmentovaného objektu. Kapacita (váha) řezu je rovna součtu kapacit všech jeho hran [3]. Hlavním problémem je hledání řezu co nejmenší možné kapacity, tedy minimálního řezu (min cut) [4]. Minimální kapacita řezu vytvoří segmentaci, která je optimální pro zahrnuté vlastnosti, které jsou začleněny v rámci vah hran. Minimální s-t řez grafu se dvěma koncovými body s a t patří mezi klasické kombinatorické úlohy, které bývají řešeny různými algoritmy [3]. U každého váhovaného směrovaného grafu existuje maximální tok a minimální řez. Velmi využíván je fakt, že velikost maximálního toku ze zdroje do stoku je rovna celkové kapacitě minimálního řezu [2], [4]. Na Obr. 1.5 je zobrazen příklad s-t řezu grafem se dvěma vnitřními vrcholy v 1, v 2. Celková hodnota znázorněného řezu je rovna součtu kapacit jeho hran, a tedy číslu 7. Obr. 1.5: Příklad s-t řezu grafem (červeně) Metody založené na grafových řezech získaly mnoho pozornosti díky tomu, že využívají hraniční i oblastní informace a dosahují globálně optimálních výsledků pro energiovou funkci, popsanou v kapitole 2.3. Navíc lze tyto postupy aplikovat i na N-dimenzionální obrazy. Mezi standartní algoritmy grafových řezů patří například tzv. Max-Flow nebo Push-Relabel [6]. 13
![2 Realizace segmentačního algoritmu Implementovaná segmentační metoda vychází z článku [7], kde je představen Square-Cut algoritmus využívající grafovou reprezentaci s návrhem její architektury na](/docs-images/91/106378066/images/14-0.jpg "základě znalosti tvaru segmentovaného objektu.")
14 2 Realizace segmentačního algoritmu Implementovaná segmentační metoda vychází z článku [7], kde je představen Square-Cut algoritmus využívající grafovou reprezentaci s návrhem její architektury na základě znalosti tvaru segmentovaného objektu. Hlavním bodem grafových segmentačních metod je utvoření váhovaného grafu G = (V, E) s množinou uzlů V a množinou hran E, kde uzly v V odpovídají pixelům obrazu a hrany v i, v j E spojují uzly v i, v j dle zvoleného systému. Každá hrana grafu má svou váhu, která může představovat určitou míru preference, zda odpovídající pixely patří do objektu zájmu, nebo rozdíl jasu uzlů, které spojuje. V závislosti na aplikaci a použitém algoritmu může být konstruovaný graf směrovaný či nesměrovaný. Zde je využit graf směrovaný. Typické grafové algoritmy, které jsou využívány pro segmentaci obrazu, zahrnují minimální kostry grafů (minimum spanning trees), hledání nejkratší cesty (shortest paths) a grafové řezy (graph-cuts), které jsou využity právě v této práci [2]. 2.1 Vytvoření grafu Konstruovaný graf obrazu má podobu pravoúhlé mřížky uzlů a hran. Vnitřní vrcholy grafu reprezentují jednotlivé pixely obrazu, imaginární vrcholy zdroj s a stok t představují označení objektu a pozadí. Sousední vrcholy jsou spojeny hranami, které se nazývají n-hrany (z anglického slova neighborhood). K tvorbě n-hran grafu může být využito 4-okolí nebo 8-okolí pro definici sousedních vrcholů. U 4-okolí je vrchol spojen n-hranami se čtyřmi sousedními vrcholy, jak lze vidět na Obr N-hrany obsahují informaci v podobě vah w(e) o rozdílu hodnot jasu dvou sousedních pixelů, které spojují. Obr. 2.1: Spojení uzlů n-hranami do 4-okolí Do grafu jsou přidány dva imaginární terminální vrcholy zdroj s a stok t, které jsou spojeny tzv. t-hranami (z anglického slova terminal) se všemi pixely obrazu, jak je znázorněno na Obr Každý pixel p má dvě t-hrany spojující ho s každým terminálem, 14
![tedy se zdrojem {p, S} a se stokem {p, T}. Všem t-hranám jsou přiřazeny nezáporné váhy w(e) na základě pravděpodobnosti výskytu jasu pixelu v histogramu objektu či pozadí [7] [8]. Obr. 2.](/docs-images/91/106378066/images/15-0.jpg "2: Grafová reprezentace obrazu Výpočty vah n-hran i t-hran vychází z minimalizace segmentační energie, která je popsána v kapitole 2.")
15 tedy se zdrojem {p, S} a se stokem {p, T}. Všem t-hranám jsou přiřazeny nezáporné váhy w(e) na základě pravděpodobnosti výskytu jasu pixelu v histogramu objektu či pozadí [7] [8]. Obr. 2.2: Grafová reprezentace obrazu Výpočty vah n-hran i t-hran vychází z minimalizace segmentační energie, která je popsána v kapitole Tvorba šablony Metody založené na grafových řezech lze klasifikovat do tří kategorií: speed up-based graph cut, interactive-based graph cut a shape prior-based graph cut, který využívá informaci o tvaru objektu [9]. Poslední uvedený algoritmus rozděluje uzly grafu v obrazu rovnoměrně a až poté je přidán parametr pro preferování určitého tvaru u segmentačního řezu. Tento postup ale nedovoluje preferovat určitou strukturu především v případech, kdy jsou části objektu jasem prakticky nerozeznatelné od pozadí. Tento problém je řešen pomocí zadaného tvaru objektu při tvorbě grafu, neboť pak vzorkované uzly grafu mohou být dle vytvořené šablony rozčleněny nerovnoměrně [7]. Realizovaný algoritmus pak začíná nastavením orientovaného grafu šablony z počátečního bodu (seed point) definovaného uživatelem. Počáteční bod by měl být umístěn uvnitř objektu pro segmentaci, ideálně zhruba uprostřed (v těžišti). Pro tvorbu je také nutné znát souřadnice krajních bodů objektu po směru hodinových ručiček. Tyto krajní body musí vhodně popisovat objekt, který chceme segmentovat. Například u čtvercové šablony jsou zadány 4 souřadnice rohových bodů, u pětiúhelníku bude 5 bodů a podobně. Zadané souřadnice jsou následně spojeny bod po bodu do uzavřeného obrysu, jak lze vidět na Obr. 2.3 (a) pro čtvercovou šablonu. Poté jsou z počátečního bodu vyslány paprsky radiálně přes vytvořený obrys. Uzly grafu jsou pak vzorkovány podél těchto paprsků, jak je znázorněno na Obr. 2.3 (b). Průsečík jednoho paprsku s obrysem šablony poskytuje vzdálenost mezi uzly jen pro tento paprsek. Všechny paprsky mají stejný počet uzlů, ale mohou mít různé vzdálenosti mezi uzly. 15


![3: Konstrukce grafu čtvercové šablony. (a) Spojené rohové body šablony. (b) Uzly šablony. (c) Z-křivky [7].](/docs-images/91/106378066/images/16-2.jpg "R-křivky A r spojují uzly mezi sousedními paprsky, r značí počet paprsků vycházejících z počátečního bodu šablony.")
 Parametr r = 0. (b) Parametr r = 1 [7].")
16 Pro průsečíky, které se nachází blíže k výchozímu bodu, budou vzdálenosti mezi uzly menší a naopak. Rozmístěné uzly v grafu budou mít odpovídající množinu hran. N-hrany spojují uzly šablony a t-hrany uzly se zdrojem s a stokem t pro výpočet s-t řezu. Existují dva typy váhovaných n-hran mezi uzly, z-křivky A z a r-křivky A r. Z-křivky, znázorněny na Obr. 2.3 (c), jsou mezi uzly daného paprsku, přičemž z udává počet navzorkovaných bodů podél jednoho paprsku. Zajišťují, aby všechny uzly podél obrysu objektu v grafu byly zahrnuty do vytvoření uzavřené množiny, tedy aby byl vnitřek objektu daným způsobem oddělen od zevnějšku. Obr. 2.3: Konstrukce grafu čtvercové šablony. (a) Spojené rohové body šablony. (b) Uzly šablony. (c) Z-křivky [7]. R-křivky A r spojují uzly mezi sousedními paprsky, r značí počet paprsků vycházejících z počátečního bodu šablony. R-křivky omezují množinu možných segmentací a určují variabilitu výsledného obrysu objektu pomocí parametru r. Čím je hodnota r vyšší, tím je větší i počet možných segmentací. R-křivky šablony s parametrem r = 0 a r = 1 jsou zobrazeny na Obr Obr. 2.4: R-křivky čtvercové šablony. (a) Parametr r = 0. (b) Parametr r = 1 [7]. Po konstrukci grafu, je vybrána v grafu uzavřená množina s minimální cenou řezu. S-t řez vytvoří optimální segmentaci objektu pod vlivem parametru r. Hodnota tohoto parametru rovna nule zajistí, že výsledkem segmentace bude přesně tvar předdefinované šablony (čtverce). S rostoucí hodnotou r je možná větší variabilita tvaru objektu [7]. 16
17 2.3 Segmentační energie Pevná omezení (hard constrains) určují dvě podmnožiny pixelů, první patří objektu obj (object) a druhá náleží pozadí bkg (background). Tyto pixely jsou označeny uživatelem jako tzv. semínka (seeds) a poskytují informace o hodnotě jasu pixelů objektu a pozadí. Segmentační metoda poté na základě definovaných omezení určí rozdělení zbylých neoznačených pixelů. Omezení samotná nejsou pro dobrou segmentaci dostačující, proto se využívá kombinace omezení a segmentační energie. Tato energie obsahuje dvě složky, hraniční (boundary term) a oblastní, též regionální složku (region term), které jsou popsány níže. Mějme množinu pixelů P a množinu N, která představuje jejich sousední systém (zde 4-okolí) všech neseřazených párů {p, q} sousedních pixelů. Dále mějme binární vektor A, jehož složky A p specifikují zařazení pixelů p v množině P. Binární vektor může nabývat hodnot A {0,1}, kde pixely p náležící objektu A p = obj získají hodnotu rovnu 1 a všechny p náležící pozadí A p = bkg hodnotu 0. Každé A p tedy může patřit buď objektu, nebo pozadí, a tudíž vektor A definuje segmentaci. Celková segmentační energie, která zahrnuje hraniční a regionové vlastnosti, pak představuje váhovou funkci: E(A) = λ R(A) + B(A), (2.1) kde koeficient λ 0 udává relativní důležitost oblastní vlastnosti R(A) oproti vlastnosti hraniční B(A). Poměr těchto složek má značný vliv na výsledek segmentace. V případě, že zvolíme hodnotu λ vyšší, bude segmentace provedena více dle intenzity pixelů než jejich vzájemné souvislosti a naopak. Cílem je nalézt segmentaci odpovídající globálnímu minimu segmentační energie E(A) z uvedené rovnice, která splňuje uživatelem definovaná pevná omezení [6] Regionální vlastnosti Regionální vlastnosti segmentační energie udávají míru příslušnosti pixelu k objektu či pozadí. Hodnota oblastní složky segmentační energie R(A) je vyjádřena jako: R(A) = R p (A p ) p P, (2.2) kde R p (A p ) představuje sankci za přiřazení pixelu do objektu nebo pozadí. R(A) udává, jak intenzita pixelů p vyhovuje histogramu objektu a pozadí. Je tedy nutné znát tyto histogramy, které jsou vytvořeny z hodnot pixelů zařazených do podmnožin objektu či pozadí dle počátečního určení pevných omezení uživatelem. Hodnoty sankcí regionálních vlastností jsou pak získány z rovnic: R p ( obj ) = ln Pr(I p obj ), (2.3) 17
18 R p ( bkg ) = ln Pr(I p bkg ), (2.4) kde Pr(I p obj ) je pravděpodobnost, že intenzita pixelu náleží do histogramu objektu a Pr(I p bkg ) pravděpodobnost, že intenzita pixelu náleží do histogramu pozadí. Do grafu obrazu se regionální vlastnosti promítnou jako váhy t-hran, tedy R p ( obj ) jako váhy t-hran mezi jednotlivými pixely a zdrojem a R p ( bkg ) mezi pixely a stokem. Pro pixely označené jako semínka objektu jsou nastaveny hodnoty vah t-hran jiné. Výsledné váhy všech t-hran jsou uvedeny v následující tabulce [6]. Tabulka 1: Váhy t-hran [6] Hrana Váha Pro {p, T} λ R p ( bkg ) p P, p obj bkg p obj 0 p bkg λ R p ( obj ) p P, p obj bkg {p, S} 0 p obj p bkg Hraniční vlastnosti Hodnoty hraničních vlastností segmentace B(A), které vyjadřují rozdíl mezi sousedními pixely, jsou definovány: B(A) = B p,q δ(a p, A q ), {p,q} N (2.5) δ(a p, A q ) = { 1 A p A q, (2.6) 0 jinak kde koeficient δ(a p, A q ) určuje, že jsou počítány jen pixely na hranici objektu a pozadí. B {p,q} větší než nula interpretuje souvislost mezi pixely p a q, hodnoty jsou vypočteny dle rovnice: B {p,q} = exp ( (I p I q ) 2 1 ), (2.7) 2σ 2 dist(p,q) kde I p a I q značí intenzity pixelů p a q, σ je rozptyl intenzit pixelů v obraze a dist(p, q) eukleidovská vzdálenost daných pixelů. Hodnota B {p,q} je vyšší, pokud jsou intenzity pixelů 18
19 p a q podobnější a je téměř nulová, pokud jsou velmi rozdílné. V grafu obrazu jsou pak hraniční vlastnosti v podobě hodnot vah n-hran mezi jednotlivými pixely [6]. 2.4 S-t řez Získané hodnoty t-hran a n-hran následně zpracovává min-cut/max-flow algoritmus Y. Boykova a V. Kolmogorova [10], který vyhledá maximální tok sítě a zjistí minimální s-t řez grafu, tedy výsledek segmentace. Použitá knihovna pro implementaci tohoto algoritmu do MATLABu je dostupná na stránkách MathWorks [11]. Všechny uzly grafu jsou algoritmem rozděleny do dvou podmnožin obj a bkg, které reprezentují objekt a pozadí obrazu. Výsledkem je matice stejných rozměrů jako výchozí obraz se značením pixelů objektu hodnotou 1 a pozadí 0. Tento proces je dosažen minimalizováním segmentační energie, neboť by měla být minimální právě na hranici objektu a pozadí [9]. Případné nedokonalosti výsledku metody jsou tedy v přímém vztahu s váhami hran grafu, čehož může být využito k nastavování úprav segmentace [6]. Jak bylo vysvětleno, modifikovaná grafová metoda, na rozdíl od původní, nevyužívá pro tvorbu specifické architektury grafu všechny pixely obrazu, ale do výsledné šablony spojuje jen některé. Provedením s-t řezu takto zkonstruovaným grafem proto není získáno rozdělení všech pixelů do podmnožin objektu a pozadí, ale zařazeny jsou jen ty, které tvoří šablonu. Pro zisk konečného výsledku je tedy navíc nutné provést následující operace. Nejprve jsou nalezeny poslední vysegmentované uzly každého paprsku šablony, které náleží objektu. Tyto body jsou spojeny do výsledného obrysu a celý prostor uvnitř je vyplněn. Získán je tedy ucelený tvar objektu a případné otvory uvnitř tohoto útvaru nejsou brány v úvahu. Z tohoto důvodu není metoda vhodná u objektů s různými otvory, jejichž segmentace je vyžadována. 19
, uzly grafu ale odpovídají obrazovým voxelům.")

20 3 Realizace ve 3D Pro možnost segmentace objemových dat, získaných z MRI či CT vyšetření, namísto pouhé 2D segmentace v jednotlivých řezech obrazu, byla grafová metoda i s využitím šablony rozšířena do třetí dimenze. Obdobně jako ve 2D realizaci, algoritmus vytvoří směrovaný graf se dvěma terminálními uzly (tzv. s-t síť), uzly grafu ale odpovídají obrazovým voxelům. Váhování t-hran terminálních uzlů, které se zdrojem s a stokem t opět spojují všechny uzly, reprezentují afinitu daného voxelu k objektu (zdroji) a k pozadí (stoku). Množina váhovaných n-hran mezi neterminálními uzly grafu je tvořena v této práci dle systému 6-okolí, které je ilustrováno na Obr Jak lze vidět, každý uzel je oproti 2D provedení navíc spojen se dvěma uzly, které leží v jiných řezech 3D obrazu. Mezi další typy sousedství patří například 18-okolí či 26-okolí. Po konstrukci grafu je spočítán minimální s-t řez, který rozdělí uzly grafu do dvou podmnožin reprezentujících objekt či pozadí. Obr. 3.1: Znázornění spojení voxelů obrazu n-hranami do 6-okolí 3.1 Tvorba šablony krychle Pro tvorbu 3D šablony byl výchozí článek [8], prezentující Cube-Cut, grafovou metodu využívající šablonu krychle pro objemovou segmentaci obrazů. Tvorba šablony je oproti 2D provedení podobná, ale parně složitější ve spojování uzlů grafu a vzorkování stran šablony. Algoritmus je ve 3D provedení též více náročný z hlediska zpracování velkého objemu dat. Segmentační algoritmus vytvoří orientovaný graf, jehož uzly patří do podmnožiny voxelů korespondujících s definovaným kubickým tvarem. Výchozími body pro tvorbu šablony jsou opět počáteční bod zhruba uprostřed segmentovaného objektu a krajní body, určené uživatelem. Souřadnice krajních bodů jsou zadány po směru hodinových ručiček pro přední a následně zadní stranu objektu. Zadané souřadnice jsou poté navzájem propojeny do uzavřeného obrysu, znázorněném na Obr. 3.2 (a). U utvořeného obrysu jsou uzly vzorkovány na spojnicích mezi krajními body a následně rovnoměrně na všech stěnách krychle dle zvoleného kroku mezi paprsky šablony, jak lze viděn na Obr. 3.2 (b). 20


. Obr. 3.2: Konstrukce grafu šablony krychle.")
21 Přes navzorkovaný povrch krychle jsou poté z počátečního bodu vyslány paprsky do vzdálenosti dle zvolené velikosti přesahu. Podél těchto paprsků jsou dle stanoveného kroku vzorkovány uzly tak, aby voxely ve stejné vrstvě vždy utvářely tvar krychle. Všechny paprsky mají tedy stejný počet uzlů, ale vzdálenosti mezi nimi bývají různé. Pokud je k uzlů na každém paprsku, pak je utvořeno k 1 krychlí různé velikosti se středem ve výchozím uzlu všech paprsků, tedy v počátečním bodě. Na povrchu každé utvořené krychle jsou voxely rozmístěny ve stejných vzdálenostech od sebe, se zvětšujícími objemy krychlí rostou i vzdálenosti voxelů na jejich povrchu. Uvnitř paprsků jsou spojeny body tzv. z-křivkami. Všechny uzly utvořené šablony s propojením z-křivkami jsou zobrazeny na Obr. 3.2 (c). Obr. 3.2: Konstrukce grafu šablony krychle. (a) Spojení krajních bodů do obrysu krychle. (b) Uzly obrysu šablony. (c) Všechny uzly šablony spojené z-křivkami. R-křivky opět spojují uzly mezi sousedními paprsky, horizontálně i vertikálně. Dle zvoleného systému je jimi každý uzel propojen se 4 uzly sousedních paprsků. Variabilita výsledného obrysu objektu oproti tvaru krychle je určena pomocí parametru r. Při hodnotě parametru r = 0 má výsledek segmentace odpovídat tvaru krychle, tudíž jsou uzly mezi různými paprsky propojeny na povrchu zvětšujících se krychlí, jak lze vidět na Obr. 3.3 (a). Se zvyšující se hodnotou tohoto parametru je pak možná vyšší variabilita tvaru objektu, jak lze pozorovat u propojení r-křivkami s parametrem r = 1 na Obr. 3.3 (b). Obr. 3.3: Šablona krychle s r-křivkami. (a) Parametr r = 0. (b) Parametr r = 1. 21

22 3.2 Tvorba 3D šablony dle binární předlohy Šablona krychle vyžaduje zadání souřadnic krajních bodů přední a následně zadní stěny. Obdobným způsobem by bylo možné vytvořit například šablonu kvádru. Avšak utváření dalších, více komplikovaných tvarů by vedlo k pracnému či zdlouhavému zadávání krajních bodů i náročnému následnému zpracování. Z toho důvodu byl pro další tvorbu zvolen postup vycházející ze zvolené předlohy, která má podobu 3D binárního obrazu. Nejprve je opět třeba zadat počáteční bod zhruba uprostřed segmentovaného objektu. Dále je vybrána binární předloha, ze které jsou získány krajní body hranovou detekcí, a to jen v řezech dle zvoleného kroku mezi paprsky šablony. Hrana je místo v obrazu s dostatečně velkou a rychlou změnou jasu. Hranová detekce je provedena na základě tzv. Sobelova lokálního operátoru, který aproximuje první derivaci diferencemi pro hledání maximálního gradientu [1]. Získán je binární obraz, ve kterém bílé pixely představují pozice hran a černé pixely místa, kde hrana není. Nalezené uzly jsou poté se stejným krokem vzorkovány. Výsledné krajní body lze vidět u šablony kulovitého tvaru na Obr. 3.4 (a). Následně jsou pozice získaných bodů posunuty podle určeného počátečního bodu v obrazu do požadované vzdálenosti. Dále jsou z počátečního bodu vyslány paprsky do všech krajních bodů a podél nich vzorkovány zbylé uzly šablony dle stanoveného kroku mezi nimi, jak je znázorněno na Obr. 3.4 (b). Podél paprsků opět spojují uzly vedle sebe z-křivky, zobrazené na Obr. 3.4 (c). Obr. 3.4: Konstrukce grafu šablony koule. (a) Počáteční bod růžově a krajní body modře. (b) Všechny uzly šablony. (c) Z-křivky. Výsledná šablona je získána propojením uzlů sousedních paprsků r-křivkami dle parametru r. Graf zkonstruované šablony koule je zobrazen na Obr. 3.5 (a) s parametrem r = 0 a na Obr. 3.5 (b) s r = 1. Jak lze pozorovat na Obr. 3.5 (a), v porovnání se šablonou krychle není každý uzel spojen r-křivkami jen se 4 okolními uzly, ale propojení může mít více, jak je tomu například u prvního a posledního bodu (na obrázku horní a dolní uzel), které jsou r-křivkami spojeny se všemi body v sousedním řezu. Pokud se vyskytuje ve vedlejší vrstvě stejný počet bodů, jsou mezi sebou postupně propojeny r-křivkami každý s každým (jak je tomu i u šablony krychle). Jelikož ale v sousedním řezu šablony stejný počet 22
 Parametr r = 0. (b) Parametr r = 1. Jak si lze povšimnout u vytvořené šablony koule na Obr. 3.5, v prvním a posledním řezu je vždy jen jeden její bod, výsledkem je tedy ucelený tvar.")

23 uzlů být nemusí, pak je v tomto případě ke každému bodu z vrstvy, kde se jich nachází více, nalezen vždy jeden nejbližší soused, se kterým je spojen. Obr. 3.5: Šablona koule s r-křivkami. (a) Parametr r = 0. (b) Parametr r = 1. Jak si lze povšimnout u vytvořené šablony koule na Obr. 3.5, v prvním a posledním řezu je vždy jen jeden její bod, výsledkem je tedy ucelený tvar. Avšak vyskytují se případy, kdy je vhodné k získaným krajním bodům hranovou detekcí z binární předlohy přidat body do plochy přední či zadní stěny, proto byla tato možnost do procesu tvorby přidána. Například právě u tvaru krychle či kvádru je třeba doplnit uzly do prvního i poslední plochy šablony, neboť je hranovou detekcí získán vždy jen obrys. Tento problém by bylo také možné řešit i provedením hranové detekce 3D Sobelovými maskami. Uzly první a poslední plochy by ale bylo třeba navzorkovat obdobným způsobem, jako jsou přidávány v uvedeném řešení. Rozdíl mezi šablonou krychle zkonstruovanou jen z nalezených krajních bodů z binární předlohy a utvořenou i z přidaných uzlů přední i zadní stěny je demonstrován na Obr Obr. 3.6: Zkonstruovaná šablona krychle dle binární předlohy. (a) Tvorba z nalezených krajních bodů. (b) Po přidání krajních bodů přední a zadní stěny, znázorněných růžovou barvou. 23

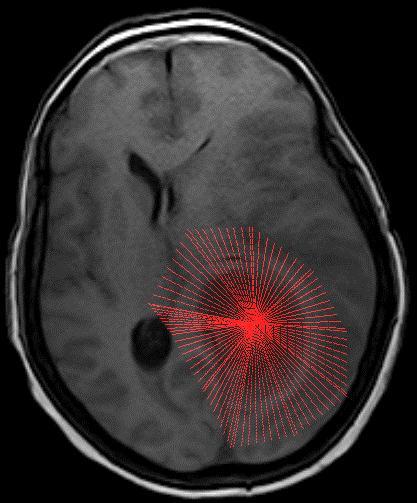
24 4 Grafické uživatelské prostředí Realizovaná segmentační metoda není zcela automatická, z toho důvodu bylo pro snadnou interakci uživatele s programem vytvořeno grafické uživatelské prostředí. Jeho názorná ukázka je představena na Obr. 4.1 s výsledkem segmentace cerebrálního abscesu na MRI snímku mozku v axiálním pohledu. Obr. 4.1: Ukázka grafického uživatelského prostředí programu u segmentace cerebrálního abscesu na snímku z MRI. Nejprve je načten výchozí obraz pro segmentaci, který je zobrazen v levém horním rohu okna programu. Poté jsou uživatelem zadány počáteční bod a krajní body pro tvorbu šablony, které je možné vyznačit ručně v načteném obrazu, nebo lze použít binární obraz jako vzor pro šablonu. Ze zvoleného vzoru jsou krajní body získány detekcí hran nebo rohů dle výběru. Při detekci hran je volen krok mezi získanými body, u detekce rohů jejich maximální počet. Detekce hran je vhodnější u objektů oblého tvaru, u kterých se rohy vyskytují v minimálním počtu či vůbec. U rohových objektů je zase více žádoucí volit detekci rohů, neboť je pak vyloučena možnost, že by krajní body v rohových místech nebyly kvůli zvolenému kroku mezi nimi. Nalezené krajní body jsou následně posunuty podle zadaného počátečního bodu v obrazu, od kterého jsou vzdáleny o zvolený počet pixelů. U šablony se dále definuje její přesah přes zadané krajní body, krok mezi jejími paprsky a body a parametr r, popsaný výše. 24

25 Dále je třeba ručně vyznačit jednu či více oblastí objektu a pozadí v obrazu buď formou jednotlivých bodů, nebo čtverce s definovanou velikostí okolí kolem zadaného bodu. Všechny označené body v původním načteném obrazu lze vidět na Obr. 4.1 vlevo nahoře, počáteční bod jako růžový bod, krajní body žlutou barvou, zadaná oblast náležící objektu jako modrý čtverec a dvě oblasti pozadí jako čtverce zelené. Na tomto obrázku je též dobře patrný důvod, proč lze značit více oblastí objektu či pozadí, neboť má pozadí oproti objektu vyšší i nižší úroveň jasu. Posledním zadávaným parametrem je koeficient λ, který souvisí se segmentační energií. V případě, že je zvolena hodnota vyšší, segmentace je provedena více dle intenzity pixelů než jejich vzájemné sousednosti a naopak. Po segmentaci jsou zobrazeny body šablony, které lze pozorovat na Obr. 4.1 vlevo dole a výsledky segmentace, zobrazené na Obr. 4.1 vpravo formou binárního obrázku a výsledného obrysu objektu v původním obrazu pro lepší zhodnocení úspěšnosti segmentace. Při neuspokojivém výsledku lze přidat další oblasti objektu či pozadí, měnit parametry šablony i segmentace a proces opakovat. Poté lze všechny výsledky, parametry, body a značení uložit pro další účely. Schéma segmentačního programu je znázorněno na Obr Obr. 4.2: Schéma realizovaného programu pro segmentaci. Pro snazší orientaci uživatele v programu byla přidána tooltip nápověda, která zobrazí jednoduchý popisek vedle kurzoru při jeho najetí na konkrétní nápis. Implementována byla i kontrola zadávaných vstupních parametrů, která uživatele upozorní na případné nedostatky a neumožní spuštění segmentace, dokud nejsou všechny údaje zadány správně. 25
26 5 Výsledky 5.1 Testování na simulovaných datech Nejprve byl segmentační algoritmus testován na simulovaných datech. Byl vytvořen obrázek obdélníku, pětiúhelníku a hvězdy s bitovou hloubkou 8 bitů a průměrnou hodnotou jasu pozadí 91 a objektu 122. Pro názornou ukázku vyšší efektivity segmentace modifikované grafové metody byly porovnávány výsledky segmentace s využitím grafových řezů bez a s použitím vytvořené šablony. U původní grafové metody jsou v grafu obrazu spojeny všechny uzly n-hranami dle systému 4-okolí. Při segmentování se šablonou n-hrany spojují jen uzly dle grafu vytvořeného podle zadaných bodů a parametrů, uvedených dále. Testování bylo provedeno na snímcích s různou úrovní Gaussovského šumu, definovanou hodnotou jeho směrodatné odchylky Obdélník Pro tvorbu šablony byl zadán počáteční bod a krajní body objektu dle Obr. 5.1 (a). Body označené jako pevná omezení pro výpočet histogramů potřebných k segmentaci (se šablonou i bez ní) jsou zobrazeny na Obr. 5.1 (b). (a) Obr. 5.1: Vstupní obraz obdélníku se zadanými body. (a) Počáteční bod šablony růžově a krajní body žlutě. (b) Označené body objektu modře a pozadí žlutě. Uzly grafu implementované čtvercové šablony jsou pak zobrazeny na Obr. 5.2 (a). Vzhledem k tomu, že má objekt v uměle vytvořeném obrazu rovné hrany, byl u n-hran šablony nastaven parametr r = 0. Bylo zjištěno, že s n-hranami tvořenými z-křivkami podél paprsku a r-křivkami mezi paprsky nejsou výsledky segmentací optimální. Následně byly pro lepší výsledky z-křivky ze všech grafů šablon odstraněny. Výsledné spojení uzlů n-hranami mezi paprsky středové části šablony je pak vykresleno na Obr. 5.2 (b). (b) 26

27 (a) (b) Obr. 5.2: Graf implementované šablony čtverce. (a) Uzly šablony. (b) N-hrany středové části šablony. Z histogramů pixelů značených v rámci pevných omezení se určuje pravděpodobnost výskytu jasu pixelu v histogramu objektu a pozadí, která je zobrazena v grafech na Obr Od úrovně šumu se směrodatnou odchylkou 10 již dochází k překrývání křivek objektu a pozadí, viz Obr. 5.3 (b). (a) (b) (c) Obr. 5.3: Pravděpodobnosti výskytu jasu pixelu obrazu v histogramu objektu (červeně) a pozadí (modře) pro různé úrovně šumu. (a) 1. (b) 10. (c) 20. (d) 30. U hodnoty směrodatné odchylky šumu rovné 1 až 10 se výsledky prakticky vůbec nelišily. Plně úspěšná byla tedy i segmentace bez využití šablony. Od úrovně šumu vyšší než 10 již ale byly výsledky metod odlišné. Následující Tabulka 2 proto uvádí vždy původní obraz a výsledek segmentace bez a se šablonou pro úrovně šumu 10 až 30. Hodnota parametru λ = 0,01 byla pro segmentaci volena s ohledem na přidávaný šum do obrazu a souvislý tvar (d) 27
 (b) (c) 20 (d)")

28 objektu. Pro srovnání výsledků se hodnota λ neměnila pro všechny segmentace v následující tabulce. Tabulka 2: Porovnání výsledků Graph-Cut segmentace obdélníku bez a se šablonou pro směrodatnou odchylku šumu Šum Původní obraz Graph-Cut bez šablony Graph-Cut se šablonou 10 (a) (b) (c) 20 (d) (e) (f) 30 (g) (h) (ch) U obrazů s takovou úrovní šumu, že dochází k výraznému překrytí histogramů objektu a pozadí, již tedy Graph-Cut segmentace samotná selhává. Přínosem je pak využití šablony, neboť má díky spojení jen jejích uzlů dle zadaných parametrů přesnější výsledky, jak ukazuje Tabulka Pětiúhelník U obrazu s pětiúhelníkem bylo pro tvorbu šablony zadáno s počátečním bodem dalších 5 krajních bodů objektu, jak je uvedeno na Obr. 5.4 (a). Dále byly označeny body objektu a pozadí jako pevná omezení, které jsou vyznačeny na Obr. 5.4 (b). 28
. Objekt má v uměle vytvořeném obrazu rovné hrany, proto byl volen opět parametr r = 0.")

29 (a) Obr. 5.4: Vstupní obraz pětiúhelníku se zadanými body. (a) Počáteční bod šablony růžově a krajní body žlutě. (b) Označené body objektu modře a pozadí žlutě. Dle zadaných bodů byl sestaven graf šablony, jehož uzly jsou zobrazeny na Obr. 5.5 (a). Objekt má v uměle vytvořeném obrazu rovné hrany, proto byl volen opět parametr r = 0. Spojení uzlů n-hranami použité pro segmentaci je pak vykresleno na Obr. 5.5 (b). (b) (a) (b) Obr. 5.5: Graf implementované šablony pětiúhelníku. (a) Uzly šablony. (b) N-hrany šablony. Testovány byly opět obrázky se šumem v rozmezí hodnot jeho směrodatné odchylky 10 až 30. Tabulka 3 zobrazuje původní obraz a výsledek Graph-Cut segmentace bez a s použitím šablony. Hodnota parametru λ byla nastavena na hodnotu 0,03, která je nízká opět kvůli přidávanému šumu, ale vyšší než u obdélníku kvůli tvaru objektu. U směrodatné odchylky šumu 10 se zdá být přesnější segmentace bez šablony, což je patrně způsobeno nepřesným zadáním krajních hodnot pro tvorbu šablony jen odhadem. Také čím více paprsků tvoří šablonu, tím přesnější výsledek segmentace jsme schopni získat. U obrazu se šumem 20 je již zřetelná výhoda použití šablony, neboť nejsou špatně segmentovány body pozadí kvůli šumu, jak tomu nastalo u segmentace bez šablony, viz Tabulka 3 (e). 29


. Zadané body pevných omezení segmentace jsou na Obr. 5.6 (b).")
30 Tabulka 3: Porovnání výsledků Graph-Cut segmentace pětiúhelníku bez a se šablonou pro směrodatnou odchylku šumu Šum Původní obraz Graph-Cut bez šablony Graph-Cut se šablonou 10 (a) (b) (c) 20 (d) (e) (f) 30 (g) (h) (ch) Hvězda Hvězda je pro segmentaci tvar již poměrně složitý, pro tvorbu šablony hvězdy muselo být zadáno 10 souřadnic vrcholů objektu, znázorněných na Obr. 5.6 (a). Zadané body pevných omezení segmentace jsou na Obr. 5.6 (b). 30
.")
31 (a) Obr. 5.6: Vstupní obraz hvězdy se zadanými body. (a) Počáteční bod šablony růžově a krajní body žlutě. (b) Označené body objektu modře a pozadí žlutě. Uzly grafu vytvořené šablony hvězdy lze vidět na Obr Parametr r byl opět nastaven na nulovou hodnotu a vzniklé n-hrany šablony hvězdy jsou znázorněny na Obr. 5.7 (b). Vzhledem k tomu, že má hvězda poměrně členitý tvar, byla zvolena vyšší hodnota parametru λ = 1, výsledek segmentace je proto náchylnější k šumu. (b) (a) (b) Obr. 5.7: Graf implementované šablony hvězdy. (a) Uzly šablony. (b) N-hrany šablony. Na Obr. 5.8 lze vidět, že byly vysegmentovány i oddělené body šablony, které zřejmě k objektu nepatří. Na základě znalosti tvaru segmentovaného objektu lze tyto body odstranit při využití šablony pomocí kontroly, zda jsou segmentovány i body sousedních paprsků, se kterými má být tento uzel spojen. Také je využito ověření, zda mezera mezi daným bodem a zbylými segmentovanými uzly není mezera větší než stanovená mez (např. o číslo větší než zvolený krok mezi uzly paprsku). Problémem by mohl být otvor v segmentovaném objektu, který ale při získání výstupu u modifikované metody není brán v úvahu, jak je popsáno v kapitole 2.4. Tabulka 4, s rozdíly Graph-Cut segmentací bez a s použitím šablony, pak obsahuje výsledky segmentace s využitím těchto kontrolních podmínek. Rozdíl segmentací je patrný již od úrovně šumu 10 právě kvůli složitějšímu tvaru hvězdy a nutnosti vyšší hodnoty λ. 31



 (b) (c) 20 (d) (e) (f) 30 (g) (h) (ch) U")


32 (a) (b) (c) Obr. 5.8: Vysegmentované body šablony hvězdy u obrazů s různou úrovní šumu. (a) 10. (b) 20. (c) 30. Tabulka 4: Porovnání výsledků Graph-Cut segmentace hvězdy bez a se šablonou pro směrodatnou odchylku šumu Šum Původní obraz Graph-Cut bez šablony Graph-Cut se šablonou 10 (a) (b) (c) 20 (d) (e) (f) 30 (g) (h) (ch) U segmentace bez využití šablony je výsledek sice lepší při nízké hodnotě parametru λ = 0,01, ale při vyšších hodnotách šumu se již ztrácí tvar hvězdy ve výstupu segmentace, jak lze pozorovat na Obr Na složitější tvary objektů k segmentaci v obrazech se šumem 32
33 či velmi podobnými hodnotami jasů objektu a pozadí tedy již prostý Graph-Cut bez využití šablony nestačí. Zato s jejím využitím lze segmentací získat lepší výsledky. (a) (b) (c) Obr. 5.9: Výsledky Graph-Cut segmentace bez šablony s λ = 0,01 u obrazů s různou úrovní šumu. (a) 10. (b) 20. (c) Testování na reálných datech Realizovaná segmentační metoda byla dále testována na reálných CT a MRI snímcích obratlů, jejichž výsledky jsou uvedeny v následující podkapitole. Jedná se o reálná pacientská data poskytnutá Vědeckým onkologickým institutem IRST v rámci spolupráce s Ústavem biomedicínského inženýrství na výzkumu. Dále byl algoritmus vyzkoušen na snímcích mozku s různými abnormalitami, o čemž pojednává podkapitola Segmentace obratlů Segmentační algoritmus se čtvercovou šablonou byl použit na reálné snímky obratlů v sagitálním pohledu. Po zadání výchozího bodu a čtyřech rohů objektu byla vytvořena šablona pro segmentaci, která je zobrazena na vstupním obrazu na Obr (a). Vzhledem k tomu, že segmentovaný objekt není přesně tvaru čtverce, byla pro tvorbu hran mezi paprsky šablony zvolena hodnota parametru r = 3. Dále se pixely objektu úrovní jasu výrazně liší od pozadí a v obraze není zřejmý výrazný šum, proto lze nastavit vyšší hodnotu λ = 3. Na Obr (b) jsou zobrazeny všechny vysegmentované body šablony, přičemž některé zřejmě k objektu nepatří. Na základě znalosti tvaru segmentovaného objektu byly tyto body odstraněny pomocí podmínek obdobných jako u segmentace hvězdy (viz kapitola 5.1.3). Na Obr (c) je pak vyobrazen výsledný obrys segmentovaného obratle, vzniklý spojením vysegmentovaných krajních bodů šablony. V Obr (d) lze pozorovat výsledek segmentace, kde jsou všechny pixely přiřazené objektu bíle a pozadí černě. 33
34 (a) (b) (c) (d) Obr. 5.10: Segmentace obratle (real_data_11) v sagitálním pohledu. (a) Body utvořené šablony. (b) Vysegmentované body šablony. (c) Obrys objektu. (d) Všechny segmentované body objektu. Vliv na podobu výsledku segmentace má i zvolený přesah šablony přes označené krajní body objektu. U obratle z předešlého snímku, u kterého se body uvnitř objektu úrovní jasu výrazně liší od pozadí, větší přesah uzlů šablony přes jeho krajní body nečiní pro segmentaci viditelný problém. Výsledek se šablonou s paprsky až k okraji snímku je zobrazen na Obr a odpovídá tvarem objektu. (a) (b) (c) Obr. 5.11: Segmentace obratle (real_data_11) s větším přesahem šablony. (a) Body šablony. (b) Výsledný obrys. (c) Výsledek. 34
35 Jak lze vidět na Obr (a), použitá šablona přesahuje přes okolní obratle, které mají podobnou úroveň jasu jako obratel segmentovaný. Z toho důvodu byla zvolena nižší hodnota parametru λ = 0,5. Problém při velkém přesahu šablony nastává u obratlů, jejichž pixely jsou uvnitř objektu úrovní jasu téměř či zcela shodné s pixely pozadí a liší se pouze body na jejich okraji. Pak je třeba pro segmentaci značit oblasti objektu na těchto krajních bodech odlišných od pozadí, jak lze vidět na Obr (a), kde je značení objektu modrou a pozadí zelenou barvou. Právě u takovýchto případů činí nesnáze vysoký přesah paprsků šablony, především pokud sahají přes další objekty, jako jsou například další obratle na snímku. Příklad segmentace, u které se z uvedených důvodů nezdařil získat uspokojivý výsledek, je znázorněn na Obr (a) (b) (c) Obr. 5.12: Problematická segmentace obratle (real_data_8). (a) Značení. (b) Výsledný obrys. (c) Neuspokojivý výsledek. Jelikož je výsledek segmentace uvedený na Obr prakticky nepoužitelný, lze v tomto případě využít menšího přesahu šablony, aby svými uzly zasahovala jen minimálně či vůbec do okolních obratlů. Výsledek segmentace stejného obratle, při použití šablony, která sahá přes sousední obratle jen neparně, je zobrazen na Obr Jak lze vidět, získaný výsledek je již přijatelný vzhledem k obtížným podmínkám na snímku. (a) (b) (c) Obr. 5.13: Problematická segmentace obratle (real_data_8). (a) Body šablony. (b) Výsledný obrys. (c) Výsledek. 35
36 Z hlediska konstruované šablony mají vliv na výsledek segmentace také volený krok mezi jejími paprsky, který odpovídá vzdálenosti mezi posledními body paprsků, tedy s největší vzdáleností od počátečního bodu, a krok mezi body podél paprsku. Tyto parametry musí být vhodně nastaveny tak, aby výsledný tvar, získaný segmentací, dostatečně odpovídal hledanému tvaru objektu. Při provedených segmentacích byl nejčastěji volen krok mezi body podél paprsků roven 1, aby bylo zajištěno, že body šablony zachytí přesně obrys objektu. Větší krok mezi body totiž znamená řidší vzorkování utvářené sítě uzlů grafu, a tím vede ke snížení přesnosti, neboť se kontura objektu může nacházet právě v bodech, které jsou vynechány. Příklad negativního vlivu na přesnost segmentace lze vidět na Obr s krokem 4 mezi body. Výsledky pro různě velký krok mezi body paprsků pak znázorňuje v příloze A Tabulka 7. (a) (b) (c) Obr. 5.14: Segmentace obratle (real_data_12). (a) Šablona s krokem 4 mezi body paprsku. (b) Výsledný obrys. (c) Výsledek. Mezi paprsky bývá volen krok větší, nejčastěji v rozmezí 10 až 20, především s ohledem na velikost snímku a segmentovaného objektu, případně dle komplikovanosti jeho tvaru. Ukázka nevhodně nastaveného kroku mezi paprsky na příliš vysokou hodnotu je uvedena na Obr Jak lze pozorovat, výsledek neodpovídá tvaru obratle v místech mezi paprsky šablony, pro větší přesnost je tedy třeba zvolit menší krok. Výsledky segmentace obratle s různým nastavením velikosti kroku mezi paprsky šablony uvádí Tabulka 6 v příloze A. (a) (b) (c) Obr. 5.15: Segmentace obratle (real_data_11). (a) Šablona s krokem 24 mezi paprsky. (b) Výsledný obrys. (c) Výsledek. 36
37 Je tedy patrné, že čím jsou kroky mezi body či paprsky menší, tím je získaný výsledek přesnější, neboť jsou aproximovány menší vzdálenosti mezi body při jejich spojování do uceleného tvaru. Při zvolení většího kroku bodů nebo paprsků ale proběhne segmentační proces rychleji, neboť je pro výpočet zahrnuto méně obrazových uzlů. Nastavení je tedy třeba provést s ohledem na parametry obrazu a požadavky na výsledek. Dále byl sledován vliv na výsledek segmentace z hlediska zadaného počtu krajních bodů. Při zadání jejich většího počtu je tvar objektu přesněji vymezen a utvořená šablona pak i více napodobuje jeho tvar. Následkem toho je možné nastavit nižší hodnotu parametru r, který při použití čtvercové šablony musí být vyšší, aby byla možná větší variabilita segmentovaného tvaru vůči utvořené šabloně. Navíc bylo pro usnadnění, a tím i urychlení procesu značení více souřadnic krajních bodů, vytvořeno grafické uživatelské rozhraní. Pro srovnání byly u stejného snímku obratle zadány nejprve 4 krajní body, jak lze vidět na Obr (a) žlutou barvou. Utvořená šablona má potom přibližně čtvercový tvar, znázorněný na Obr (b). Pro segmentaci byl zvolen jako optimální parametr r = 3. U výsledného obrysu, získaného touto segmentací, uvedeného na Obr (c), lze pozorovat odlišnost od tvaru obratle zejména v jeho rozích, ačkoli jeho segmentovaný tvar není příliš složitý. (a) (b) (c) Obr. 5.16: Segmentace obratle (real_data_5) s označením 4 krajních bodů. (a) Značení. (b) Utvořená šablona. (c) Výsledek segmentace. Dále bylo na totožném snímku obratle zadáno celkem 12 krajních bodů tak, aby vhodně popisovaly jeho tvar, znázorněny jsou žlutou barvou na Obr (a). Zkonstruovaná šablona pak obrysem více kopíruje tvar obratle, jak lze pozorovat na Obr (b), proto byl zvolen parametr r = 0. Získán byl výsledek skutečně odpovídající tvaru segmentovaného objektu, zobrazen na Obr (c). 37


38 (a) (b) (c) Obr. 5.17: Segmentace obratle (real_data_5) s označením 12 krajních bodů. (a) Značení. (b) Šablona. (c) Výsledek. Dále tedy bylo na snímcích obratlů zadáváno více krajních bodů pro tvorbu šablony, aby její tvar více napodoboval vybraný obratel. Další ukázky výsledků segmentace obratlů vzhledem k zadanému počtu krajních bodů jsou uvedeny v příloze A, Tabulka 5. Při použití binární předlohy pro tvorbu šablony je třeba dbát především na to, zda tvarem skutečně alespoň přibližně odpovídá segmentovanému objektu, a také zda je vzhledem k němu ve vhodném natočení. Například čtvercovou či obdélníkovou šablonu lze použít pro segmentaci obratle jen v případech, kdy na snímku není obratel nijak výrazně nakloněn či pootočen. Příklad nevhodné aplikace šablony dle binární předlohy obdélníku je ukázán na Obr u obratle, jehož tvar je vzhledem k použité šabloně značně odlišný. Z toho důvodu se nezdařilo získat uspokojivý výsledek, což potvrzuje klíčovost správné formy použité šablony pro segmentaci. Výsledek segmentace tohoto obratle při použití vhodné šablony bez binární předlohy lze vidět v příloze A, Tabulka 5 (g) až (k). (a) (b) (c) Obr. 5.18: Segmentace obratle (real_data_6) s nevhodným použitím obdélníkové binární předlohy pro šablonu. (a) Značení. (b) Obdélníková šablona. (c) Výsledek. Příklad přijatelného použití binární předlohy čtverce pro konstrukci šablony je uveden na Obr Vzhledem k tomu, že se obrys obratle na daném CT snímku od čtvercového tvaru neodchyluje výrazně, byl zvolen parametr r = 1 a bylo dosaženo optimálního výsledku. Binární předlohu jednoduchého tvaru tedy pro segmentaci obratle v některých případech skutečně lze využít. 38

39 (a) (b) (c) Obr. 5.19: Segmentace obratle (real_data_12) s vyhovujícím použitím čtvercové binární předlohy pro šablonu. (a) Značení. (b) Čtvercová šablona. (c) Výsledek. Při patřičném zadání všech zmíněných bodů, označení a parametrů, případně po jejich úpravě, lze ve většině případů docílit přijatelného výsledku segmentace obratle. Pro srovnání byly snímky obratlů segmentovány i původní nemodifikovanou grafovou metodou, tedy bez využití šablony. Na Obr je zobrazeno porovnání segmentace u obratle, jehož část je úrovní jasu špatně rozlišitelná od pozadí. Lze vidět, že metoda modifikovaná, využívající šablonu, uvedenou na Obr. 5.17, je zde úspěšná a metoda původní selhává. (a) (b) (c) Obr. 5.20: Segmentace obratle (real_data_5). (a) Značení oblastí. (b) Výsledek původní metody. (c) Výsledek metodou s využitím šablony. Na Obr je uvedeno srovnání metod u obratle, jenž se naopak svou úrovní jasu liší od pozadí výrazně. Metodou s využitím čtvercové šablony, zobrazené na Obr. 5.19, je vysegmentován pouze zvolený obratel. Původní metodou jsou vysegmentovány všechny objekty stejného jasu v obrazu, jako vybraný obratel. Je tedy na uživateli, co požaduje. Výsledky dalších porovnání jsou uvedeny v příloze A, Tabulka 8. 39
")
40 (a) (b) (c) Obr. 5.21: Segmentace obratle (real_data_12). (a) Značení oblastí. (b) Výsledek původní metody. (c) Výsledek metodou s využitím šablony Segmentace snímků mozku Realizovaná segmentační metoda byla dále testována na reálných CT a MRI snímcích mozku s různými abnormalitami, spojenými především s nádorovými onemocněními. Vzhledem k velké různorodosti segmentovaných útvarů v mozku byly pro tvorbu šablony krajní body zadávány ručně, bez využití binárních předloh. U značení oblastí objektu a pozadí se ukázala výhodná možnost označení více oblastí s různou úrovní jasu pro tvorbu histogramů. Využití značení vícero oblastí pozadí lze pozorovat na Obr se segmentací meningiomu, jehož část okraje je u lebky špatně rozlišitelná od pozadí. Jako oblasti pozadí byly označeny jak světlejší a tmavší oblast kůry mozkové, tak i tmavé okolí hlavy, na Obr (a) jsou zelenou barvou. Dále jsou na Obr (b) zobrazeny body použité šablony, která svými paprsky sahá až k okraji obrazu, a tedy zahrnuje uzly téměř všech úrovní jasu v obrazu. Na Obr (c) lze pozorovat dosažený výsledek, který téměř odpovídá hledanému obrysu. 40

.")
41 (a) (b) (c) (d) Obr. 5.22: Segmentace meningiomu na MRI (T2) snímku hlavy v sagitálním pohledu. (a) Značení bodů a oblastí. (b) Utvořená šablona. (c) Výsledný obrys. (d) Výsledek. [12] Na následující ukázce segmentace glioblastomu na Obr lze vidět, že si realizovaný segmentační algoritmus dokáže poradit i s více komplikovaným tvarem objektu. Klíčové je zadání dostatečného množství krajních bodů tak, aby dostatečně vystihly útvar pro segmentaci a samozřejmě vhodně vyznačit oblasti objektu a pozadí, jak je ukázáno na Obr (a). Krok mezi paprsky je třeba zvolit tak, aby nebyla vynechána žádná změna ve tvaru obrysu objektu, jak lze vidět u vykreslené šablony na Obr (b). Paprsky konstruované šablony také sahají jen k vnitřnímu okraji lebky, neboť při jejím přesahu již nastává problém obdobný, jako byl popsán u obratle na Obr. 5.12, a segmentovány jsou i pixely lebky. I přes složitost segmentovaného útvaru byl získán poměrně přesný výsledek segmentace, který je uveden na Obr (c) a (d). Na získaných výsledcích lze také pozorovat, že u objektu nejsou segmentovány žádné otvory uvnitř jeho struktury, neboť touto metodou nejsou při zpracování brány v úvahu, jak bylo vysvětleno v kapitole
 Utvořená šablona. (c) Výsledný obrys. (d) Výsledek. [13] Ve srovnání s původní grafovou metodou, jejíž výsledek je uveden na Obr. 5.")
 (b) Obr. 5.")
42 (a) (b) (c) (d) Obr. 5.23: Segmentace glioblastomu Butterfly glioma na snímku hlavy v axiální rovině. (a) Značení bodů a oblastí. (b) Utvořená šablona. (c) Výsledný obrys. (d) Výsledek. [13] Ve srovnání s původní grafovou metodou, jejíž výsledek je uveden na Obr. 5.24, jsou sice segmentovány i otvory v objektu, ale i všechny světlé části v obrazu. Další ukázky provedených segmentací na snímcích mozku jsou k nahlédnutí v příloze B, Tabulka 9. (a) (b) Obr. 5.24: Segmentace glioblastomu. (a) Značení oblastí. (b) Výsledek původní metody.[13] 42
 je zobrazen T1-váhovaný MRI snímek řezu zhruba středem tohoto nádoru.")

 Počáteční bod a krajních body šablony. Výsledek získaný segmentací, tedy objem celého nádoru je uveden na Obr. 5.26 (a).")
43 5.3 Testování 3D dat Pro testování metody ve 3D provedení byla použita reálná pacientská data získaná v rámci výzkumů probíhajících na Ústavu biomedicínského inženýrství. Dále je uveden příklad segmentace nádoru na mozku. Na Obr (a) je zobrazen T1-váhovaný MRI snímek řezu zhruba středem tohoto nádoru. Použita byla šablona koule, zkonstruovaná dle binární předlohy, jejíž tvorba je popsána v kapitole 3.2. Vzhledem k tomu, že tvar nádoru není přesně kulovitého tvaru, byl zvolen parametr r = 1. Pro lepší představu je na Obr (b) znázorněn počáteční bod a krajní body šablony jen orientačně v daném řezu snímku. (a) Obr. 5.25: (a) T1-váhovaný MRI snímek řezu středem nádoru. (b) Počáteční bod a krajních body šablony. Výsledek získaný segmentací, tedy objem celého nádoru je uveden na Obr (a). Vysegmentované body jsou také vyznačeny v daném řezu z předchozího obrázku na Obr (b) červenou barvou. (b) (a) Obr. 5.26: Výsledek segmentace nádoru mozku. (a) 3D vizualizace nádoru. (b) Vysegmentované body v řezu zhruba středem nádoru. (b) 43
44 Jak lze vidět na Obr (b) s řezem přibližně uprostřed nádoru, je pro tuto část výsledek segmentace zdařilý, stejně jako ve většině segmentovaného objemu tohoto nádoru. Nedokonalosti ve výsledku nastávají pouze u krajních řezů, patrně v důsledku použití šablony koule, od které se tvar nádoru výrazně liší. Komplikací je také především proces spojování vysegmentovaných bodů šablony pro zisk výsledku, který je značně komplikovaný a zavádí patrné nerovnosti ve výsledném obrysu a další případné nedostatky a odchylky v dosaženém tvaru. 44
45 6 Závěr Cílem bakalářské práce bylo prostudování segmentačních metod založených na grafové reprezentaci, zejména těch s návrhem architektury grafu s využitím znalosti o tvaru segmentovaného objektu. Dále měl být proveden návrh postupu pro vytvoření šablony pro segmentaci na základě znalosti segmentovaného obrazu, realizace navržené segmentační metody a její testování na simulovaných i reálných medicínských datech v programovém prostředí MATLAB. V první kapitole jsou popsány základní pojmy z teorie grafů, ze kterých grafové segmentační metody obrazů vychází. Pro realizaci segmentační metody byl zvolen algoritmus hledající minimální řez utvořeným grafem. Samotná realizace segmentačního algoritmu je podrobně vysvětlena ve druhé kapitole. Konkrétně je popsáno vytvoření grafové reprezentace obrazu, tvorba implementované šablony a využití segmentační energie pro řez grafem, který je proveden pomocí algoritmu Boykova a Kolmogorova v MATLABu. Grafová metoda byla i s využitím šablony navíc rozšířena do třetí dimenze pro možnost segmentace objemových dat, jak je uvedeno ve třetí kapitole. Pro snadnou interakci uživatele s programem bylo vytvořeno grafické uživatelské rozhraní pro definování šablony, bodů a parametrů potřebných k provedení segmentace, popsané ve čtvrté kapitole segmentace. V páté kapitole jsou uvedeny a diskutovány výsledky testování nejprve na simulovaných datech, konkrétně obrázku obdélníku, pětiúhelníku a hvězdy včetně postupu tvorby použité šablony. Porovnány jsou výsledky segmentace s využitím grafových řezů bez a s vytvořenou šablonou na obrazech s různou úrovní Gaussovského šumu. Dle získaných výsledků lze usuzovat vyšší efektivitu segmentace při využití definované šablony, zejména při vyšší úrovni šumu v obrazu a složitějším tvaru segmentovaného objektu. Dále bylo provedeno testování realizované segmentační metody na reálných medicínských CT a MRI snímcích obratlů a mozku. Z výsledků vyplývá, že lze vytvořený program s výhodou využít i pro segmentace objektů obtížně rozlišitelných od pozadí. I když metoda není zcela automatická a uživatel musí zadat různá značení a parametry, pomocí postupných úprav může dospět k výsledku požadované úrovně. 45
46 Literatura [1] JAN, Jiří. Medical Image Processing, Reconstruction and Restorations: Concepts and Methods. Boca Raton: Taylor, ISBN [2] LE ZORAY, Olivier a Leo GRADY. Image processing and analysis with graphs: theory and practice. Boca Raton, FL: Taylor, 2012, xxiv, 537 p. ISBN [3] KANG LI, XIAODONG WU, D.Z. CHEN a M. SONKA. Optimal Surface Segmentation in Volumetric Images-A Graph-Theoretic Approach. IEEE Transactions on Pattern Analysis and Machine Intelligence [online]. 2006, 28(1): [cit ]. DOI: /TPAMI ISSN Dostupné z: [4] MAREŠ, Martin. Krajinou grafových algoritmů: průvodce pro středně pokročilé. Vyd. 1. Praha: ITI, 2007, 71 s. ISBN [5] FORD, L a D FULKERSON. Flows in networks. New Jersey: Princeton University Press, 2011, xix, 194 s. princeton landmarks in mathematics. ISBN [6] BOYKOV, Y. a M.-P. JOLLY. Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images. Proceedings of International Conference on Computer Vision. IEEE Computer Society. July 2001, Vol. 1, pp ISBN [7] EGGER, Jan, Tina KAPUR, Thomas DUKATZ, Malgorzata KOLODZIEJ, Dženan ZUKIĆ, Bernd FREISLEBEN, Christopher NIMSKY a Yong FAN. Square-Cut: A Segmentation Algorithm on the Basis of a Rectangle Shape. PLoS ONE [online] , 7(2): e [cit ]. DOI: /journal.pone ISSN Dostupné z: [8] SCHWARZENBERG, Robert, Bernd FREISLEBEN, Christopher NIMSKY, Jan EGGER, Yong FAN, Bernd FREISLEBEN, Christopher NIMSKY a Yong FAN. Cube- Cut: Vertebral Body Segmentation in MRI-Data through Cubic-Shaped Divergences. PLoS ONE [online] , 9(4): e [cit ]. DOI: /journal.pone ISSN Dostupné z: [9] YI, Faliu a Inkyu MOON. Image segmentation: A survey of graph-cut methods International Conference on Systems and Informatics (ICSAI2012). IEEE, 2012, : DOI: /ICSAI ISBN Dostupné také z: 46
47 [10] BOYKOV, Y. a V. KOLMOGOROV. An experimental comparison of min-cut/maxflow algorithms for energy minimization in vision. IEEE Transactions on Pattern Analysis and Machine Intelligence. 26: DOI: /TPAMI ISSN Dostupné také z: [11] RUBINSTEIN, Miki. A wrapper library for Boykov and Kolmogorov maxflow/min-cut implementation. In: Mathworks [online] [cit ]. Dostupné z: [12] AL SALAM, Hani. Meningioma. In: Radiopaedia.org [online] [cit ]. Dostupné z: [13] GAILLARD, Frank. Butterfly glioma. In: Radiopaedia.org [online] [cit ]. Dostupné z: [14] RABOU, Ahmed Abd. Acoustic schwannoma. In: Radiopaedia.org [online] [cit ]. Dostupné z: [15] GAILLARD, Frank. Basal ganglia bleed. In: Radiopaedia.org [online] [cit ]. Dostupné z: [16] GAILLARD, Frank. Cerebral absceses. In: Radiopaedia.org [online] [cit ]. Dostupné z: [17] RABOU, Ahmed Abd. Glioblastoma. In: Radiopaedia.org [online] [cit ]. Dostupné z: [18] GAILLARD, Frank. Primary CNS lymphoma: B-cell in the setting of HIV infection. In: Radiopaedia.org [online] [cit ]. Dostupné z: 47
48 A. Ukázky segmentace snímků obratlů Tabulka 5: Vliv počtu zadaných krajních bodů na výsledek segmentace snímku obratle. (a - f) Real_data_7. (g - k) Real_data_6. Body Označení bodů a oblastí. Šablona Výsledý obrys 4 (a) (b) (c) 15 (d) (e) (f) 4 (g) (h) (ch) 15 (i) (j) (k) 48
49 Tabulka 6: Vliv velikosti kroku mezi paprsky šablony na segmentaci obratle (real_data_11). Krok Šablona Výsledý obrys Výsledek
50

51 Tabulka 7: Vliv velikosti kroku mezi body paprsků šablony na segmentaci obratle (real_data_12) s využitím binární předlohy čtverce pro tvorbu šablony. Krok Šablona Výsledý obrys Výsledek





 Bez")

52 Tabulka 8: Srovnání výsledků segmentace obratlů původní nemodifikovanou grafovou metodou a její upravenou verzí s využitím šablony. Značení (bez šablony) Bez šablony Se šablonou Real_data_6 Real_data_7 Real_data_8 Real_data_11 52



53 B. Ukázky segmentace u snímků mozku Tabulka 9: Segmentace různých abnormalit na CT a MRI snímcích mozku. Šablona Výsledný obrys Výsledek Vestibular swannoma [14] Krvácení basálních ganglií [15] Cerebrální absces [16] 53


54 Glioblastom [17] Glioblastom [17] Lymfom [18] 54
ZÁKLADNÍ METODY REFLEKTOMETRIE
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF
GIS Geografické informační systémy
 GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
Grafy. doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava. Prezentace ke dni 13.
 Grafy doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 13. března 2017 Jiří Dvorský (VŠB TUO) Grafy 104 / 309 Osnova přednášky Grafy
Grafy doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 13. března 2017 Jiří Dvorský (VŠB TUO) Grafy 104 / 309 Osnova přednášky Grafy
4EK311 Operační výzkum. 5. Teorie grafů
 4EK311 Operační výzkum 5. Teorie grafů 5. Teorie grafů definice grafu Graf G = uspořádaná dvojice (V, E), kde V označuje množinu n uzlů u 1, u 2,, u n (u i, i = 1, 2,, n) a E označuje množinu hran h ij,
4EK311 Operační výzkum 5. Teorie grafů 5. Teorie grafů definice grafu Graf G = uspořádaná dvojice (V, E), kde V označuje množinu n uzlů u 1, u 2,, u n (u i, i = 1, 2,, n) a E označuje množinu hran h ij,
GIS Geografické informační systémy
 GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Převody geometrií Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu
5 Orientované grafy, Toky v sítích
 Petr Hliněný, FI MU Brno, 205 / 9 FI: IB000: Toky v sítích 5 Orientované grafy, Toky v sítích Nyní se budeme zabývat typem sít ových úloh, ve kterých není podstatná délka hran a spojení, nýbž jejich propustnost
Petr Hliněný, FI MU Brno, 205 / 9 FI: IB000: Toky v sítích 5 Orientované grafy, Toky v sítích Nyní se budeme zabývat typem sít ových úloh, ve kterých není podstatná délka hran a spojení, nýbž jejich propustnost
9 Prostorová grafika a modelování těles
 9 Prostorová grafika a modelování těles Studijní cíl Tento blok je věnován základům 3D grafiky. Jedná se především o vysvětlení principů vytváření modelů 3D objektů, jejich reprezentace v paměti počítače.
9 Prostorová grafika a modelování těles Studijní cíl Tento blok je věnován základům 3D grafiky. Jedná se především o vysvětlení principů vytváření modelů 3D objektů, jejich reprezentace v paměti počítače.
Základy informatiky. Teorie grafů. Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová
 Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
Základy informatiky Teorie grafů Zpracoval: Pavel Děrgel Úprava: Daniela Szturcová Obsah přednášky Barvení mapy Teorie grafů Definice Uzly a hrany Typy grafů Cesty, cykly, souvislost grafů Barvení mapy
Základní pojmy teorie grafů [Graph theory]
![Základní pojmy teorie grafů [Graph theory]](/thumbs/25/4817299.jpg "Základní pojmy teorie grafů [Graph theory]") Část I Základní pojmy teorie grafů [Graph theory] V matematice grafem obvykle rozumíme grafické znázornění funkční závislosti. Pro tento předmět je však podstatnější pohled jiný. V teorii grafů rozumíme
Část I Základní pojmy teorie grafů [Graph theory] V matematice grafem obvykle rozumíme grafické znázornění funkční závislosti. Pro tento předmět je však podstatnější pohled jiný. V teorii grafů rozumíme
Operace s obrazem II
 Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
Operace s obrazem II Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova Matematická morfologie Segmentace obrazu Klasifikace objektů
ÚLOHY S POLYGONEM. Polygon řetězec úseček, poslední bod je totožný s prvním. 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU
 ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
ÚLOHY S POLYGONEM Polygon řetězec úseček, poslední bod je totožný s prvním 6 bodů: X1, Y1 až X6,Y6 Y1=X6, Y1=Y6 STANOVENÍ PLOCHY JEDNOHO POLYGONU 3 úsečky (segmenty) v horní části 2 úsečky ve spodní části
Metody síťové analýzy
 Metody síťové analýzy Řeší problematiku složitých systémů, zejména pak vazby mezi jejich jednotlivými prvky. Vychází z teorie grafů. Základní metody síťové analýzy: CPM (Critical Path Method) deterministický
Metody síťové analýzy Řeší problematiku složitých systémů, zejména pak vazby mezi jejich jednotlivými prvky. Vychází z teorie grafů. Základní metody síťové analýzy: CPM (Critical Path Method) deterministický
Operační výzkum. Síťová analýza. Metoda CPM.
 Operační výzkum Síťová analýza. Metoda CPM. Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu Fakulty ekonomiky a managementu Registrační číslo
Operační výzkum Síťová analýza. Metoda CPM. Operační program Vzdělávání pro konkurenceschopnost Název projektu: Inovace magisterského studijního programu Fakulty ekonomiky a managementu Registrační číslo
Text úlohy. Která barva nepatří do základních barev prostoru RGB? Vyberte jednu z nabízených možností: a. Černá b. Červená c. Modrá d.
 Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
Úloha 1 Která barva nepatří do základních barev prostoru RGB? a. Černá b. Červená c. Modrá d. Zelená Úloha 2 V rovině je dán NEKONVEXNÍ n-úhelník a bod A. Pokud paprsek (polopřímka) vedený z tohoto bodu
13 Barvy a úpravy rastrového
 13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
13 Barvy a úpravy rastrového Studijní cíl Tento blok je věnován základním metodám pro úpravu rastrového obrazu, jako je např. otočení, horizontální a vertikální překlopení. Dále budo vysvětleny různé metody
Úloha - rozpoznávání číslic
 Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
Úloha - rozpoznávání číslic Vojtěch Franc, Tomáš Pajdla a Tomáš Svoboda http://cmp.felk.cvut.cz 27. listopadu 26 Abstrakt Podpůrný text pro cvičení předmětu X33KUI. Vysvětluje tři způsoby rozpoznávání
CVIČNÝ TEST 37. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
CVIČNÝ TEST 37 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 5 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na staré hliněné desce je namalován čtverec
Úvod do teorie grafů
 Úvod do teorie grafů Neorientovaný graf G = (V,E,I) V množina uzlů (vrcholů) - vertices E množina hran - edges I incidence incidence je zobrazení, buď: funkce: I: E V x V relace: I E V V incidence přiřadí
Úvod do teorie grafů Neorientovaný graf G = (V,E,I) V množina uzlů (vrcholů) - vertices E množina hran - edges I incidence incidence je zobrazení, buď: funkce: I: E V x V relace: I E V V incidence přiřadí
Algoritmizace prostorových úloh
 INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Grafové úlohy Daniela Szturcová Tento
INOVACE BAKALÁŘSKÝCH A MAGISTERSKÝCH STUDIJNÍCH OBORŮ NA HORNICKO-GEOLOGICKÉ FAKULTĚ VYSOKÉ ŠKOLY BÁŇSKÉ - TECHNICKÉ UNIVERZITY OSTRAVA Algoritmizace prostorových úloh Grafové úlohy Daniela Szturcová Tento
Jasové transformace. Karel Horák. Rozvrh přednášky:
 1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
1 / 23 Jasové transformace Karel Horák Rozvrh přednášky: 1. Úvod. 2. Histogram obrazu. 3. Globální jasová transformace. 4. Lokální jasová transformace. 5. Bodová jasová transformace. 2 / 23 Jasové transformace
Matematická morfologie
 / 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
/ 35 Matematická morfologie Karel Horák Rozvrh přednášky:. Úvod. 2. Dilatace. 3. Eroze. 4. Uzavření. 5. Otevření. 6. Skelet. 7. Tref či miň. 8. Ztenčování. 9. Zesilování..Golayova abeceda. 2 / 35 Matematická
Grafové algoritmy. Programovací techniky
 Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Automatická detekce anomálií při geofyzikálním průzkumu. Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011
 Automatická detekce anomálií při geofyzikálním průzkumu Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011 Cíle doktorandské práce Seminář 10. 11. 2010 Najít, implementovat, ověřit a do praxe
Automatická detekce anomálií při geofyzikálním průzkumu Lenka Kosková Třísková NTI TUL Doktorandský seminář, 8. 6. 2011 Cíle doktorandské práce Seminář 10. 11. 2010 Najít, implementovat, ověřit a do praxe
Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na. x 2 x 1
 Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
Kapitola 4 Rasterizace objektů Rasterizace je proces při kterém se vektorově definovaná grafika konvertuje na rastrově definované obrazy. Při zobrazení reálného modelu ve světových souřadnicích na výstupní
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Příklady použití tenkých vrstev Jaromír Křepelka
 Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
Příklady použití tenkých vrstev Jaromír Křepelka Příklad 01 Spočtěte odrazivost prostého rozhraní dvou izotropních homogenních materiálů s indexy lomu n 0 = 1 a n 1 = 1,52 v závislosti na úhlu dopadu pro
CVIČNÝ TEST 48. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 48 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán konvexní čtyřúhelník, jehož vnitřní
CVIČNÝ TEST 48 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán konvexní čtyřúhelník, jehož vnitřní
Grafové algoritmy. Programovací techniky
 Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
Grafové algoritmy Programovací techniky Grafy Úvod - Terminologie Graf je datová struktura, skládá se z množiny vrcholů V a množiny hran mezi vrcholy E Počet vrcholů a hran musí být konečný a nesmí být
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV BIOMEDICÍNSKÉHO INŽENÝRSTVÍ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT
Křivky a plochy technické praxe
 Kapitola 7 Křivky a plochy technické praxe V technické praxi se setkáváme s tím, že potřebujeme křivky a plochy, které se dají libovolně upravovat a zároveň je jejich matematické vyjádření jednoduché.
Kapitola 7 Křivky a plochy technické praxe V technické praxi se setkáváme s tím, že potřebujeme křivky a plochy, které se dají libovolně upravovat a zároveň je jejich matematické vyjádření jednoduché.
Katedra informatiky, Univerzita Palackého v Olomouci. 27. listopadu 2013
 Katedra informatiky, Univerzita Palackého v Olomouci 27. listopadu 2013 Rekonstrukce 3D těles Reprezentace trojrozměrných dat. Hledání povrchu tělesa v těchto datech. Představení několika algoritmů. Reprezentace
Katedra informatiky, Univerzita Palackého v Olomouci 27. listopadu 2013 Rekonstrukce 3D těles Reprezentace trojrozměrných dat. Hledání povrchu tělesa v těchto datech. Představení několika algoritmů. Reprezentace
Metoda Monte Carlo a její aplikace v problematice oceňování technologií. Manuál k programu
 Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Metoda Monte Carlo a její aplikace v problematice oceňování technologií Manuál k programu This software was created under the state subsidy of the Czech Republic within the research and development project
Modely teorie grafů, min.kostra, max.tok, CPM, MPM, PERT
 PEF ČZU Modely teorie grafů, min.kostra, max.tok, CPM, MPM, PERT Okruhy SZB č. 5 Zdroje: Demel, J., Operační výzkum Jablonský J., Operační výzkum Šubrt, T., Langrová, P., Projektové řízení I. a různá internetová
PEF ČZU Modely teorie grafů, min.kostra, max.tok, CPM, MPM, PERT Okruhy SZB č. 5 Zdroje: Demel, J., Operační výzkum Jablonský J., Operační výzkum Šubrt, T., Langrová, P., Projektové řízení I. a různá internetová
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 1 bod 1 Určete průsečík P[x, y] grafů funkcí f: y = x + 2 a g: y = x 1 2, které jsou definovány na množině reálných
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 1 bod 1 Určete průsečík P[x, y] grafů funkcí f: y = x + 2 a g: y = x 1 2, které jsou definovány na množině reálných
Rozšíření bakalářské práce
 Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
Rozšíření bakalářské práce Vojtěch Vlkovský 2011 1 Obsah Seznam obrázků... 3 1 Barevné modely... 4 1.1 RGB barevný model... 4 1.2 Barevný model CMY(K)... 4 1.3 Další barevné modely... 4 1.3.1 Model CIE
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
CVIČNÝ TEST 5. OBSAH I. Cvičný test 2. Mgr. Václav Zemek. II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19
 CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
= je prostý orientovaný graf., formálně c ( u, v) 0. dva speciální uzly: zdrojový uzel s a cílový uzel t. Dále budeme bez
 0. dva speciální uzly: zdrojový uzel s a cílový uzel t. Dále budeme bez") Síť Síť je čtveřice N = ( G, s, t, c) kde G ( V, A) = je prostý orientovaný graf a každé orientované hraně ( u, v) je přiřazeno nezáporné číslo, které se nazývá kapacita hrany ( u, v), formálně c ( u,
Síť Síť je čtveřice N = ( G, s, t, c) kde G ( V, A) = je prostý orientovaný graf a každé orientované hraně ( u, v) je přiřazeno nezáporné číslo, které se nazývá kapacita hrany ( u, v), formálně c ( u,
Obsah prezentace. Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest
 Obsah prezentace Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest 1 Základní pojmy Vrchol grafu: {množina V} Je to styčná vazba v grafu, nazývá se též uzlem, prvkem
Obsah prezentace Základní pojmy v teorii o grafech Úlohy a prohledávání grafů Hledání nejkratších cest 1 Základní pojmy Vrchol grafu: {množina V} Je to styčná vazba v grafu, nazývá se též uzlem, prvkem
Základy informatiky. 07 Teorie grafů. Kačmařík/Szturcová/Děrgel/Rapant
 Základy informatiky 07 Teorie grafů Kačmařík/Szturcová/Děrgel/Rapant Obsah přednášky barvení mapy teorie grafů definice uzly a hrany typy grafů cesty, cykly, souvislost grafů Barvení mapy Kolik barev je
Základy informatiky 07 Teorie grafů Kačmařík/Szturcová/Děrgel/Rapant Obsah přednášky barvení mapy teorie grafů definice uzly a hrany typy grafů cesty, cykly, souvislost grafů Barvení mapy Kolik barev je
CVIČNÝ TEST 15. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
CVIČNÝ TEST 41. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 41 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán magický čtverec, pro nějž platí,
CVIČNÝ TEST 41 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán magický čtverec, pro nějž platí,
Jaroslav Tuma. 8. února 2010
 Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Semestrální práce z předmětu KMA/MM Odstraňování šumu z obrazu Jaroslav Tuma 8. února 2010 1 1 Zpracování obrazu Zpracování obrazu je disciplína zabývající se zpracováním obrazových dat různého původu.
Grafy. RNDr. Petra Surynková, Ph.D. Univerzita Karlova v Praze Matematicko-fyzikální fakulta.
 6 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info množina vrcholů a množina hran hrana vždy spojuje
6 RNDr., Ph.D. Katedra didaktiky matematiky Univerzita Karlova v Praze Matematicko-fyzikální fakulta petra.surynkova@mff.cuni.cz http://surynkova.info množina vrcholů a množina hran hrana vždy spojuje
Copyright 2013 Martin Kaňka; http://dalest.kenynet.cz
 Copyright 2013 Martin Kaňka; http://dalest.kenynet.cz Popis aplikace Tato aplikace je koncipována jako hra, může být použita k demonstraci důkazu. Může žáky učit, jak manipulovat s dynamickými objekty,
Copyright 2013 Martin Kaňka; http://dalest.kenynet.cz Popis aplikace Tato aplikace je koncipována jako hra, může být použita k demonstraci důkazu. Může žáky učit, jak manipulovat s dynamickými objekty,
AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza
 AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Shluková analýza Cílem shlukové analýzy je nalézt v datech podmnožiny
AVDAT Mnohorozměrné metody, metody klasifikace Shluková analýza Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Shluková analýza Cílem shlukové analýzy je nalézt v datech podmnožiny
K OZA SE PASE NA POLOVINĚ ZAHRADY Zadání úlohy
 Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
Koza se pase na polovině zahrady, Jaroslav eichl, 011 K OZA E PAE NA POLOVINĚ ZAHADY Zadání úlohy Zahrada kruhového tvaru má poloměr r = 10 m. Do zahrady umístíme kozu, kterou přivážeme provazem ke kolíku
Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost.
 Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost. Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a
Euklidovský prostor. Funkce dvou proměnných: základní pojmy, limita a spojitost. Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a
GIS Geografické informační systémy
 GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu geoprvků. Geometrická
GIS Geografické informační systémy Obsah přednášky Prostorové vektorové modely Špagetový model Topologický model Vektorový model Reprezentuje reálný svět po jednotlivých složkách popisu geoprvků. Geometrická
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH
 DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
DETEKCE HRAN V BIOMEDICÍNSKÝCH OBRAZECH Viktor Haškovec, Martina Mudrová Vysoká škola chemicko-technologická v Praze, Ústav počítačové a řídicí techniky Abstrakt Příspěvek je věnován zpracování biomedicínských
Jana Dannhoferová Ústav informatiky, PEF MZLU
 Počítačová grafika 1. Definice oblasti souvisí: a) s definováním množiny všech bodů, které náleží do hranice a zároveň do jejího vnitřku b) s popisem její hranice c) s definováním množiny všech bodů, které
Počítačová grafika 1. Definice oblasti souvisí: a) s definováním množiny všech bodů, které náleží do hranice a zároveň do jejího vnitřku b) s popisem její hranice c) s definováním množiny všech bodů, které
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY
 TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
TSO NEBO A INVARIANTNÍ ROZPOZNÁVACÍ SYSTÉMY V PROSTŘEDÍ MATLAB K. Nováková, J. Kukal FJFI, ČVUT v Praze ÚPŘT, VŠCHT Praha Abstrakt Při rozpoznávání D binárních objektů z jejich diskrétní realizace se využívají
TEORIE GRAFŮ TEORIE GRAFŮ 1
 TEORIE GRAFŮ 1 TEORIE GRAFŮ Přednášející: RNDr. Jiří Taufer, CSc. Fakulta dopravní ČVUT v Praze, letní semestr 1998/99 Zpracoval: Radim Perkner, tamtéž, v květnu 1999 ZÁKLADNÍ POJMY Říkáme, že je dán prostý
TEORIE GRAFŮ 1 TEORIE GRAFŮ Přednášející: RNDr. Jiří Taufer, CSc. Fakulta dopravní ČVUT v Praze, letní semestr 1998/99 Zpracoval: Radim Perkner, tamtéž, v květnu 1999 ZÁKLADNÍ POJMY Říkáme, že je dán prostý
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
TECHNICKÉ PARAMETRY DIPLOMOVÉ PRÁCE
 TECHNICKÉ PARAMETRY DIPLOMOVÉ PRÁCE 1. VAZBA Práce je vázána v pevných deskách, na kterých jsou následující údaje: Název vysoké školy a fakulty; jméno autora diplomové práce; název práce; Diplomová práce
TECHNICKÉ PARAMETRY DIPLOMOVÉ PRÁCE 1. VAZBA Práce je vázána v pevných deskách, na kterých jsou následující údaje: Název vysoké školy a fakulty; jméno autora diplomové práce; název práce; Diplomová práce
State Space Search Step Run Editace úloh Task1 Task2 Init Clear Node Goal Add Shift Remove Add Node Goal Node Shift Remove, Add Node
 State Space Search Po spuštění appletu se na pracovní ploše zobrazí stavový prostor první předpřipravené úlohy: - Zeleným kroužkem je označen počáteční stav úlohy, který nemůže být změněn. - Červeným kroužkem
State Space Search Po spuštění appletu se na pracovní ploše zobrazí stavový prostor první předpřipravené úlohy: - Zeleným kroužkem je označen počáteční stav úlohy, který nemůže být změněn. - Červeným kroužkem
zdroj světla). Z metod transformace obrázku uvedeme warping a morfing, které se
. Z metod transformace obrázku uvedeme warping a morfing, které se") Kapitola 3 Úpravy obrazu V následující kapitole se seznámíme se základními typy úpravy obrazu. První z nich je transformace barev pro výstupní zařízení, dále práce s barvami a expozicí pomocí histogramu
Kapitola 3 Úpravy obrazu V následující kapitole se seznámíme se základními typy úpravy obrazu. První z nich je transformace barev pro výstupní zařízení, dále práce s barvami a expozicí pomocí histogramu
ALGORITMY A DATOVÉ STRUKTURY
 Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE SAMONASÁVACÍ ČERPADLO SELF-PRIMING PUMP DIPLOMOVÁ
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ENERGETICKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING ENERGY INSTITUTE SAMONASÁVACÍ ČERPADLO SELF-PRIMING PUMP DIPLOMOVÁ
Interaktivní segmentace obrazu s využitím algoritmu pro maximalizaci toku v síti.
 1/5 Interaktivní segmentace obrazu s využitím algoritmu pro maximalizaci toku v síti. Semestrální projekt: MI-DZO - Digitální zpracování obrazu Zpracoval: Tomáš Borovička. LS 2011 Úvod Metoda segmentace
1/5 Interaktivní segmentace obrazu s využitím algoritmu pro maximalizaci toku v síti. Semestrální projekt: MI-DZO - Digitální zpracování obrazu Zpracoval: Tomáš Borovička. LS 2011 Úvod Metoda segmentace
Výhody a nevýhody jednotlivých reprezentací jsou shrnuty na konci kapitoly.
 Kapitola Reprezentace grafu V kapitole?? jsme se dozvěděli, co to jsou grafy a k čemu jsou dobré. rzo budeme chtít napsat nějaký program, který s grafy pracuje. le jak si takový graf uložit do počítače?
Kapitola Reprezentace grafu V kapitole?? jsme se dozvěděli, co to jsou grafy a k čemu jsou dobré. rzo budeme chtít napsat nějaký program, který s grafy pracuje. le jak si takový graf uložit do počítače?
Zada ní 1. Semina rní pra ce z pr edme tu Matematický software (KI/MSW)
") Zada ní. Semina rní pra ce z pr edme tu Matematický software (KI/MSW) Datum zadání: 5.. 06 Podmínky vypracování: - Seminární práce se skládá z programové části (kódy v Matlabu) a textové části (protokol
Zada ní. Semina rní pra ce z pr edme tu Matematický software (KI/MSW) Datum zadání: 5.. 06 Podmínky vypracování: - Seminární práce se skládá z programové části (kódy v Matlabu) a textové části (protokol
Funkce v ıce promˇ enn ych Extr emy Pˇredn aˇska p at a 12.bˇrezna 2018
 Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Teorie náhodných matic aneb tak trochu jiná statistika
 Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
Zpracování digitalizovaného obrazu (ZDO) - Segmentace
 - Segmentace") Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
Zpracování digitalizovaného obrazu (ZDO) - Segmentace úvod, prahování Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Zpracování digitalizovaného obrazu
Ludolfovo číslo přepočítá z diskrétního do Euklidova prostoru - 1
 Ludolfovo číslo přepočítá z diskrétního do Euklidova prostoru - 1 Bohumír Tichánek 7 Práce zdůvodňuje způsob využití Ludolfova čísla při převodu bodu, a to z diskrétního do Euklidova prostoru. Tím se bod
Ludolfovo číslo přepočítá z diskrétního do Euklidova prostoru - 1 Bohumír Tichánek 7 Práce zdůvodňuje způsob využití Ludolfova čísla při převodu bodu, a to z diskrétního do Euklidova prostoru. Tím se bod
Lineární funkce, rovnice a nerovnice
 Lineární funkce, rovnice a nerovnice 1. Lineární funkce 1.1 Základní pojmy Pojem lineární funkce Funkce je předpis, který každému číslu x z definičního oboru funkce přiřadí právě jedno číslo y Obecně je
Lineární funkce, rovnice a nerovnice 1. Lineární funkce 1.1 Základní pojmy Pojem lineární funkce Funkce je předpis, který každému číslu x z definičního oboru funkce přiřadí právě jedno číslo y Obecně je
CVIČNÝ TEST 36. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 36 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Určete iracionální číslo, které je vyjádřeno číselným výrazem (6 2 π 4
CVIČNÝ TEST 36 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Určete iracionální číslo, které je vyjádřeno číselným výrazem (6 2 π 4
7. Funkce jedné reálné proměnné, základní pojmy
 , základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
, základní pojmy POJEM FUNKCE JEDNÉ PROMĚNNÉ Reálná funkce f jedné reálné proměnné je funkce (zobrazení) f: X Y, kde X, Y R. Jde o zvláštní případ obecného pojmu funkce definovaného v přednášce. Poznámka:
Postup zadávání základové desky a její interakce s podložím v programu SCIA
 Postup zadávání základové desky a její interakce s podložím v programu SCIA Tloušťka desky h s = 0,4 m. Sloupy 0,6 x 0,6m. Zatížení: rohové sloupy N 1 = 800 kn krajní sloupy N 2 = 1200 kn střední sloupy
Postup zadávání základové desky a její interakce s podložím v programu SCIA Tloušťka desky h s = 0,4 m. Sloupy 0,6 x 0,6m. Zatížení: rohové sloupy N 1 = 800 kn krajní sloupy N 2 = 1200 kn střední sloupy
CVIČNÝ TEST 51. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 51 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 V obchodě s kouzelnickými potřebami v Kocourkově
CVIČNÝ TEST 51 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 V obchodě s kouzelnickými potřebami v Kocourkově
4EK213 LINEÁRNÍ MODELY
 4EK213 LINEÁRNÍ MODELY Úterý 11:00 12:30 hod. učebna SB 324 Mgr. Sekničková Jana, Ph.D. 2. PŘEDNÁŠKA MATEMATICKÝ MODEL ÚLOHY LP Mgr. Sekničková Jana, Ph.D. 2 OSNOVA PŘEDNÁŠKY Obecná formulace MM Množina
4EK213 LINEÁRNÍ MODELY Úterý 11:00 12:30 hod. učebna SB 324 Mgr. Sekničková Jana, Ph.D. 2. PŘEDNÁŠKA MATEMATICKÝ MODEL ÚLOHY LP Mgr. Sekničková Jana, Ph.D. 2 OSNOVA PŘEDNÁŠKY Obecná formulace MM Množina
----- Studijní obory. z matematiky. z matematiky. * Aplikovaná matematika * Matematické metody v ekonomice
 Minimum Maximum Minimum Maximum Studijní obory z matematiky z matematiky z matematiky z matematiky * Aplikovaná matematika * Matematické metody v ekonomice * Obecná matematika Navazující magisterský studijní
Minimum Maximum Minimum Maximum Studijní obory z matematiky z matematiky z matematiky z matematiky * Aplikovaná matematika * Matematické metody v ekonomice * Obecná matematika Navazující magisterský studijní
Měření průtoku kapaliny s využitím digitální kamery
 Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Měření průtoku kapaliny s využitím digitální kamery Mareš, J., Vacek, M. Koudela, D. Vysoká škola chemicko-technologická Praha, Ústav počítačové a řídicí techniky, Technická 5, 166 28, Praha 6 e-mail:
Algoritmy pro shlukování prostorových dat
 Algoritmy pro shlukování prostorových dat Marta Žambochová Katedra matematiky a informatiky Fakulta sociálně ekonomická Univerzita J. E. Purkyně v Ústí nad Labem ROBUST 21. 26. leden 2018 Rybník - Hostouň
Algoritmy pro shlukování prostorových dat Marta Žambochová Katedra matematiky a informatiky Fakulta sociálně ekonomická Univerzita J. E. Purkyně v Ústí nad Labem ROBUST 21. 26. leden 2018 Rybník - Hostouň
Vícerozměrné statistické metody
 Vícerozměrné statistické metody Shluková analýza Jiří Jarkovský, Simona Littnerová FSTA: Pokročilé statistické metody Typy shlukových analýz Shluková analýza: cíle a postupy Shluková analýza se snaží o
Vícerozměrné statistické metody Shluková analýza Jiří Jarkovský, Simona Littnerová FSTA: Pokročilé statistické metody Typy shlukových analýz Shluková analýza: cíle a postupy Shluková analýza se snaží o
FRVŠ 2829/2011/G1. Tvorba modelu materiálu pro živé tkáně
 FOND ROZVOJE VYSOKÝCH ŠKOL 2011 FRVŠ 2829/2011/G1 Tvorba modelu materiálu pro živé tkáně Řešitel: Ing. Jiří Valášek Vysoké učení technické v Brně Fakulta strojního inženýrství Spoluřešitel 1: Ing. David
FOND ROZVOJE VYSOKÝCH ŠKOL 2011 FRVŠ 2829/2011/G1 Tvorba modelu materiálu pro živé tkáně Řešitel: Ing. Jiří Valášek Vysoké učení technické v Brně Fakulta strojního inženýrství Spoluřešitel 1: Ing. David
CVIČNÝ TEST 13. OBSAH I. Cvičný test 2. Mgr. Zdeňka Strnadová. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 13 Mgr. Zdeňka Strnadová OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 V trojúhelníku ABC na obrázku dělí úsečka
CVIČNÝ TEST 13 Mgr. Zdeňka Strnadová OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 V trojúhelníku ABC na obrázku dělí úsečka
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Kartografické modelování. VIII Modelování vzdálenosti
 VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
VIII Modelování vzdálenosti jaro 2015 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Vzdálenostní funkce
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1
 SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
SYLABUS PŘEDNÁŠKY 10 Z GEODÉZIE 1 (Souřadnicové výpočty 4, Orientace osnovy vodorovných směrů) 1. ročník bakalářského studia studijní program G studijní obor G doc. Ing. Jaromír Procházka, CSc. prosinec
ANALÝZA A KLASIFIKACE BIOMEDICÍNSKÝCH DAT. Institut biostatistiky a analýz
 ANALÝZA A KLASIFIKACE BIOMEDICÍNSKÝCH DAT prof. Ing. Jiří Holčík,, CSc. NEURONOVÉ SÍTĚ otázky a odpovědi 1 AKD_predn4, slide 8: Hodnota výstupu závisí na znaménku funkce net i, tedy na tom, zda bude suma
ANALÝZA A KLASIFIKACE BIOMEDICÍNSKÝCH DAT prof. Ing. Jiří Holčík,, CSc. NEURONOVÉ SÍTĚ otázky a odpovědi 1 AKD_predn4, slide 8: Hodnota výstupu závisí na znaménku funkce net i, tedy na tom, zda bude suma
6.1 Vektorový prostor
 6 Vektorový prostor, vektory Lineární závislost vektorů 6.1 Vektorový prostor Nechť je dán soubor nějakých prvků, v němž je dána jistá struktura vztahů mezi jednotlivými prvky nebo v němž jsou předepsána
6 Vektorový prostor, vektory Lineární závislost vektorů 6.1 Vektorový prostor Nechť je dán soubor nějakých prvků, v němž je dána jistá struktura vztahů mezi jednotlivými prvky nebo v němž jsou předepsána
Zobrazování těles. problematika geometrického modelování. základní typy modelů. datové reprezentace modelů základní metody geometrického modelování
 problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
problematika geometrického modelování manifold, Eulerova rovnost základní typy modelů hranový model stěnový model objemový model datové reprezentace modelů základní metody geometrického modelování těleso
Dobývání znalostí. Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze
 Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Pravděpodobnost a učení Doc. RNDr. Iveta Mrázová,
Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Pravděpodobnost a učení Doc. RNDr. Iveta Mrázová,
4.2.3 Orientovaný úhel
 4.2. Orientovaný úhel Definice úhlu ze základní školy: Úhel je část roviny ohraničená dvojicí polopřímek se společným počátečním bodem (konvexní a nekonvexní úhel). Nevýhody této definice: Nevím jaký úhel
4.2. Orientovaný úhel Definice úhlu ze základní školy: Úhel je část roviny ohraničená dvojicí polopřímek se společným počátečním bodem (konvexní a nekonvexní úhel). Nevýhody této definice: Nevím jaký úhel
Vyhledávání. doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava. Prezentace ke dni 21.
 Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
Vyhledávání doc. Mgr. Jiří Dvorský, Ph.D. Katedra informatiky Fakulta elektrotechniky a informatiky VŠB TU Ostrava Prezentace ke dni 21. září 2018 Jiří Dvorský (VŠB TUO) Vyhledávání 242 / 433 Osnova přednášky
Vzdálenost uzlů v neorientovaném grafu
 Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
Vzdálenosti a grafy Vzdálenost uzlů v neorientovaném grafu Je dán neorientovaný neohodnocený graf G = (V,E,I) vzdálenost uzlů u a v v neorientovaném souvislém grafu G je délka nejkratší cesty spojující
Státnice odborné č. 20
 Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
Státnice odborné č. 20 Shlukování dat Shlukování dat. Metoda k-středů, hierarchické (aglomerativní) shlukování, Kohonenova mapa SOM Shlukování dat Shluková analýza je snaha o seskupení objektů do skupin
MATEMATIKA V MEDICÍNĚ
 MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
MATEMATIKA V MEDICÍNĚ Tomáš Oberhuber Fakulta jaderná a fyzikálně inženýrská České vysoké učení technické v Praze Matematika pro život TOMÁŠ OBERHUBER (FAKULTA JADERNÁ A FYZIKÁLNĚ INŽENÝRSKÁ MATEMATIKA
REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB
 62 REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB BEZOUŠKA VLADISLAV Abstrakt: Text se zabývá jednoduchým řešením metody nejmenších čtverců v prostředí Matlab pro obecné víceparametrové aproximační funkce. Celý postup
62 REGRESNÍ ANALÝZA V PROSTŘEDÍ MATLAB BEZOUŠKA VLADISLAV Abstrakt: Text se zabývá jednoduchým řešením metody nejmenších čtverců v prostředí Matlab pro obecné víceparametrové aproximační funkce. Celý postup
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
SÍŤOVÁ ANALÝZA. Kristýna Slabá, kslaba@students.zcu.cz. 1. července 2010
 SÍŤOVÁ ANALÝZA Kristýna Slabá, kslaba@students.zcu.cz 1. července 2010 Obsah 1 Úvod do síťové analýzy Hlavní metody síťové analýzy a jejich charakteristika Metoda CPM Metoda PERT Nákladová analýza Metoda
SÍŤOVÁ ANALÝZA Kristýna Slabá, kslaba@students.zcu.cz 1. července 2010 Obsah 1 Úvod do síťové analýzy Hlavní metody síťové analýzy a jejich charakteristika Metoda CPM Metoda PERT Nákladová analýza Metoda
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
CVIČNÝ TEST 35. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 35 Mgr. Tomáš Kotler OBSAH I. Cvičný test II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Vypočtěte [( 3 3 ) ( 1 4 5 3 0,5 ) ] : 1 6 1. 1 bod VÝCHOZÍ TEXT K ÚLOZE
CVIČNÝ TEST 35 Mgr. Tomáš Kotler OBSAH I. Cvičný test II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST 1 Vypočtěte [( 3 3 ) ( 1 4 5 3 0,5 ) ] : 1 6 1. 1 bod VÝCHOZÍ TEXT K ÚLOZE
Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů)
") Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů) Autor: Vladimir Vapnik Vapnik, V. The Nature of Statistical Learning Theory.
Algoritmy a struktury neuropočítačů ASN P9 SVM Support vector machines Support vector networks (Algoritmus podpůrných vektorů) Autor: Vladimir Vapnik Vapnik, V. The Nature of Statistical Learning Theory.
2.1 Pokyny k otevřeným úlohám. 2.2 Pokyny k uzavřeným úlohám TESTOVÝ SEŠIT NEOTVÍREJTE, POČKEJTE NA POKYN!
 MATEMATIKA+ DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 23 úloh. Časový limit pro řešení didaktického testu
MATEMATIKA+ DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bodů Hranice úspěšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 23 úloh. Časový limit pro řešení didaktického testu
MATEMATIKA A 3 Metodický list č. 1
 Metodický list č. 1 Název tématického celku: Úvod do problematiky diskrétní matematiky Cíl: Cílem tohoto tématického celku je vymezení oblasti diskrétní matematiky a příprava na další výklad kurzu. Jedná
Metodický list č. 1 Název tématického celku: Úvod do problematiky diskrétní matematiky Cíl: Cílem tohoto tématického celku je vymezení oblasti diskrétní matematiky a příprava na další výklad kurzu. Jedná
10. cvičení z PST. 5. prosince T = (n 1) S2 X. (n 1) s2 x σ 2 q χ 2 (n 1) (1 α 2 ). q χ 2 (n 1) 2. 2 x. (n 1) s. x = 1 6. x i = 457.
 S2 X. (n 1) s2 x σ 2 q χ 2 (n 1) (1 α 2 ). q χ 2 (n 1) 2. 2 x. (n 1) s. x = 1 6. x i = 457.") 0 cvičení z PST 5 prosince 208 0 (intervalový odhad pro rozptyl) Soubor (70, 84, 89, 70, 74, 70) je náhodným výběrem z normálního rozdělení N(µ, σ 2 ) Určete oboustranný symetrický 95% interval spolehlivosti
0 cvičení z PST 5 prosince 208 0 (intervalový odhad pro rozptyl) Soubor (70, 84, 89, 70, 74, 70) je náhodným výběrem z normálního rozdělení N(µ, σ 2 ) Určete oboustranný symetrický 95% interval spolehlivosti
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na bájný zikkurat tvaru komolého kolmého jehlanu s větší podstavou u země vede
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Na bájný zikkurat tvaru komolého kolmého jehlanu s větší podstavou u země vede