Monte Carlo Lokalizace. Martin Skalský
|
|
|
- Zdeňka Pospíšilová
- před 6 lety
- Počet zobrazení:
Transkript

1 Monte Carlo Lokalizace Martin Skalský
 Je důležitá Knowledge about where things are is at the core of any succesfull physical interaction with the environment Sebastian Thrun Je obtížná Other vehicles")
2 Proč Lokalizace? Problém určení pozice robota a věcí kolem něj. (filtrování dat, state estimation) Je důležitá Knowledge about where things are is at the core of any succesfull physical interaction with the environment Sebastian Thrun Je obtížná Other vehicles were very good at sensing obstacles, but had difficulty following waypoints or were scared of their own shadow, hallucinating obstacles where they weren't Thomas Strat
3 Lokalizace je obtížná Prostředí je částečně pozorovatelné -Senzory jsou drahé -Nepřesné -Poskytují pouze nepřímé informace Nedeterministické Dynamické -ještě navíc bych to chtěl často real time (pokud nejsem v cernu)




4 Tři druhy problémů Sledování Pozice -výrazně jednodušší než ostatní problémy Určení Pozice -složitost roste s rozsahem světa Problém Uneseného robota -Výrazně nejobtížnější problém
5 Jak na to? Poskytneme robotovi pravděpodobnostní model situace: specifikujeme množinu stavových proměných. skrytých a množinu Predikční model světa: (z Markovova předpokladu) Model Senzorů: (z Markovova předpokladu) Počáteční stav: (všimněte si vztahu s problémem lokalizace) pozorovatelných
6 Pane, pojďtě si hrát Je Markovův předpoklad smysluplný? Stačí nám takovýto model? Chce to ještě něco?
7 Pane, pojďtě si hrát Je markovův předpoklad smysluplný? -závisí na doméně Stačínám takový to model? -ANO... sestrojíme sdruženou distribuční funkci pro všechny proměnné: -marginalizace nám odpoví na všechny otázky o doméně Chce to ještě něco? -stacionární proces, rekurzivní rovnice pro filtrování
8 Rekurzivní rovnice Umožnuje nám postupně přidávat pozorování do aktuální představy o světě(sekvenčně) -identifikujeme 2 části výpočtu Predikci a upravení pravděpodobností podle pozorování

9 Spojitá doména! Integrál místo násobení Diskretizace Parametrické modely- potřebujeme vyšší vyjadřovací sílu.
10 Diskretizace Hidden Markov Models/Dynamic bayesian networks -diskretizují na mřížku

11 Kalmanův filter aproximace pomocí normálního rozdělení nenároční na výpočetní sílu Není schopen využívat univerzálního predikčního modelu ani modelu senzorů

12 Monte Carlo Metody Monte Carlo je Rodina pravděpodobnostních algoritmů Příklad: Výpočet π 1.Sestrojte čtverec a mu vepište kružnici 2.Vemte hrst čočky a vyhoďte do vzduchu 3.Spočtěte poměr k zrnek čočky ve čtverci a v kružnici 4. π =k4 -Čím více čočky, tím větší přesnost

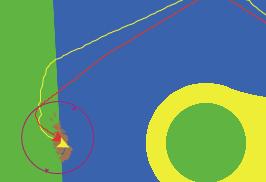
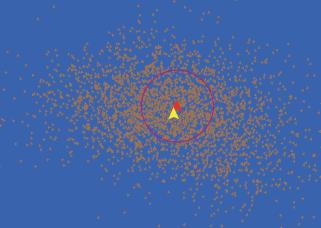
13 Monte Carlo Lokalizace Sekvenční Monte Carlo Rozložení pravděpodobnosti pozic robota je reprezentováno množinou vážených částic Interference probíhá nad touto množinou částic

14 3 kroky algoritmu Predikční krok Využijeme přechodový model : všem částicím vygenerujeme: Typicky se zvyšuje nejistota ohledně pozice robota Dead reckoning (navigace výpočtem)
15 3 kroky algoritmu Korekční krok (update) Využívá model senzorů: Pomocí Bayesovy věty upravuje váhy částic: α normalizační faktor

16 3 kroky algoritmu Převzorkování (resampling) Cílem je získat množinu prvků se stejnými vahami -prvky s malými vahami zanikají -s velkými se duplikují Snaha je omezovat šum při převzorkování Polya process bojujeme proti strátě variability Při velkem počtu prvků hraje volba převzorkovací ho algoritmu spíše okrajovou úlohu.
17 Vlastnosti Schopnost reprezentovat libovolné rozložení pravděpodobnosti. Akceptovat libovolný model světa a senzorů Přirozeně koncentruje výpočetní sílu na místa která nás zajímají Schopno řešit problém sledování pozice i problém globální lokalizace Snadná paralizovatelnost Možnost Hard Real Time

18 Vlastnosti Může mít problém s příliš přesnými senzory -I zcela selhat při použití příliš přesných senzorů
19 Rozšíření Mixture MCL Snaha řešit i problém uneseseného robota Část vzorků je generováná pouze podle aktuálního pozorování variabilní přimíchávání vzorků
20 Kontakt: Literatura: S. J. Russell and P. Norvig, Artificial intelligence : a modern approach, 3rd ed., Upper Saddle River: Prentice Hall, U. Wilensky, NetLogo, Center for Connected Learning and Computer-Based Modeling, Northwestern University, Evanston, IL., [Online]. Available: [Přístup získán ]. S. Thrun, D. Fox, W. Burgard a F. Dellaert, Robust Monte Carlo localization for mobile robots, Artificial Intelligence, sv. 128, pp , May 2001 D. A. Levin, Markov chains and mixing times, Providence: American Mathematical Society, 2009
Cíle lokalizace. Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí
 2. vzhledem k mapě 3. v daném prostředí") Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
Cíle lokalizace Zjištění: 1. polohy a postavení robota (robot pose) 2. vzhledem k mapě 3. v daném prostředí 2 Jiný pohled Je to problém transformace souřadnic Mapa je globální souřadnicový systém nezávislý
Úvod do mobilní robotiky NAIL028
 md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
md at robotika.cz http://robotika.cz/guide/umor08/cs 11. listopadu 2008 1 2 PID Sledování cesty Modely kolových vozidel (1/5) Diferenční řízení tank b Encoder Motor Centerpoint Motor Encoder Modely kolových
Agent pracující v částečně pozorovatelném prostředí udržuje na základě senzorického modelu odhaduje, jak se svět může vyvíjet.
 Umělá inteligence II Roman Barták, KTIML roman.bartak@mff.cuni.cz http://ktiml.mff.cuni.cz/~bartak Dnešní program Agent pracující v částečně pozorovatelném prostředí udržuje na základě senzorického modelu
Umělá inteligence II Roman Barták, KTIML roman.bartak@mff.cuni.cz http://ktiml.mff.cuni.cz/~bartak Dnešní program Agent pracující v částečně pozorovatelném prostředí udržuje na základě senzorického modelu
Úvod do mobilní robotiky AIL028
 Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Lokalizace zbynek.winkler at mff.cuni.cz http://robotika.cz/guide/umor05/cs 21. listopadu 2005 1 Tank Auto 2 Relativní versus absolutní Kalmanův filtr Lokalizace Kde to jsem? Obsah sledování pozice (position
Odhad stavu matematického modelu křižovatek
 Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Stavový model a Kalmanův filtr
 Stavový model a Kalmanův filtr 2 prosince 23 Stav je veličina, kterou neznáme, ale chtěli bychom znát Dozvídáme se o ní zprostředkovaně prostřednictvím výstupů Příkladem může býapř nějaký zašuměný signál,
Stavový model a Kalmanův filtr 2 prosince 23 Stav je veličina, kterou neznáme, ale chtěli bychom znát Dozvídáme se o ní zprostředkovaně prostřednictvím výstupů Příkladem může býapř nějaký zašuměný signál,
Jan Škoda. 29. listopadu 2013
 Matematicko-fyzikální fakulta Univerzity Karlovy v Praze 29. listopadu 2013 Náplň přednášky state estimation Naivní přístup KF Matematický model Problém podmínky linearity EKF. & ukázka Co se nedozvíte:
Matematicko-fyzikální fakulta Univerzity Karlovy v Praze 29. listopadu 2013 Náplň přednášky state estimation Naivní přístup KF Matematický model Problém podmínky linearity EKF. & ukázka Co se nedozvíte:
SLAM. Simultaneous localization and mapping. Ing. Aleš Jelínek 2015
 SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
SLAM Simultaneous localization and mapping Ing. Aleš Jelínek 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 Obsah Proč sebelokalizace,
Měření dat Filtrace dat, Kalmanův filtr
 Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-02-28 12:20 Obsah
Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-02-28 12:20 Obsah
VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ
 VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ Michal Kořenář 1 Abstrakt Rozvoj výpočetní techniky v poslední době umožnil také rozvoj výpočetních metod, které nejsou založeny na bázi
VYUŽITÍ PRAVDĚPODOBNOSTNÍ METODY MONTE CARLO V SOUDNÍM INŽENÝRSTVÍ Michal Kořenář 1 Abstrakt Rozvoj výpočetní techniky v poslední době umožnil také rozvoj výpočetních metod, které nejsou založeny na bázi
Třídy složitosti P a NP, NP-úplnost
 Třídy složitosti P a NP, NP-úplnost Cíle přednášky: 1. Definovat, za jakých okolností můžeme problém považovat za efektivně algoritmicky řešitelný. 2. Charakterizovat určitou skupinu úloh, pro které není
Třídy složitosti P a NP, NP-úplnost Cíle přednášky: 1. Definovat, za jakých okolností můžeme problém považovat za efektivně algoritmicky řešitelný. 2. Charakterizovat určitou skupinu úloh, pro které není
Bayesovské metody. Mnohorozměrná analýza dat
 Mnohorozměrná analýza dat Podmíněná pravděpodobnost Definice: Uvažujme náhodné jevy A a B takové, že P(B) > 0. Podmíněnou pravěpodobností jevu A za podmínky, že nastal jev B, nazýváme podíl P(A B) P(A
Mnohorozměrná analýza dat Podmíněná pravděpodobnost Definice: Uvažujme náhodné jevy A a B takové, že P(B) > 0. Podmíněnou pravěpodobností jevu A za podmínky, že nastal jev B, nazýváme podíl P(A B) P(A
Metoda Monte Carlo, simulované žíhání
 co byste měli umět po dnešní lekci: integrovat pomocí metody Monte Carlo modelovat jednoduché mnočásticové systémy (Brownův pohyb,...) nalézt globální minimum pomocí simulovaného žíhání Určení čísla metodou
co byste měli umět po dnešní lekci: integrovat pomocí metody Monte Carlo modelovat jednoduché mnočásticové systémy (Brownův pohyb,...) nalézt globální minimum pomocí simulovaného žíhání Určení čísla metodou
Pohyb holonomního robota bludištěm
 Pohyb holonomního robota bludištěm Hlavní charakteristiky robota : Koncepce: holonomní robot řízený třemi DC motory Celkové rozměry : výška 200 mm, průměr 350 mm Napájení: Akumulátory, 6x LiON Sony 18650,
Pohyb holonomního robota bludištěm Hlavní charakteristiky robota : Koncepce: holonomní robot řízený třemi DC motory Celkové rozměry : výška 200 mm, průměr 350 mm Napájení: Akumulátory, 6x LiON Sony 18650,
Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE. Marek Skalka. Srovnání lokalizačních technik
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Marek Skalka Srovnání lokalizačních technik Katedra softwarového inženýrství Vedoucí diplomové práce: RNDr. David Obdržálek Studijní
Univerzita Karlova v Praze Matematicko-fyzikální fakulta DIPLOMOVÁ PRÁCE Marek Skalka Srovnání lokalizačních technik Katedra softwarového inženýrství Vedoucí diplomové práce: RNDr. David Obdržálek Studijní
Měření dat Filtrace dat, Kalmanův filtr
 Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
7. Rozdělení pravděpodobnosti ve statistice
 7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
7. Rozdělení pravděpodobnosti ve statistice Statistika nuda je, má však cenné údaje, neklesejte na mysli, ona nám to vyčíslí Jednou z úloh statistiky je odhad (výpočet) hodnot statistického znaku x i,
Úvod do mobilní robotiky AIL028
 SLAM - souběžná lokalizace a mapování {md zw} at robotika.cz http://robotika.cz/guide/umor07/cs 10. ledna 2008 1 2 3 SLAM intro Obsah SLAM = Simultaneous Localization And Mapping problém typu slepice-vejce
SLAM - souběžná lokalizace a mapování {md zw} at robotika.cz http://robotika.cz/guide/umor07/cs 10. ledna 2008 1 2 3 SLAM intro Obsah SLAM = Simultaneous Localization And Mapping problém typu slepice-vejce
Markovské procesy. příklad: diabetický pacient, hladina inzulinu, léky, jídlo
 Pravděpodobnostní usuzování v čase Markovské procesy příklad: diabetický pacient, hladina inzulinu, léky, jídlo předpokládáme, že se množina možných stavů S nemění v průběhu času předpokládáme diskrétní
Pravděpodobnostní usuzování v čase Markovské procesy příklad: diabetický pacient, hladina inzulinu, léky, jídlo předpokládáme, že se množina možných stavů S nemění v průběhu času předpokládáme diskrétní
a způsoby jejího popisu Ing. Michael Rost, Ph.D.
 Podmíněná pravděpodobnost, náhodná veličina a způsoby jejího popisu Ing. Michael Rost, Ph.D. Podmíněná pravděpodobnost Pokud je jev A vázán na uskutečnění jevu B, pak tento jev nazýváme jevem podmíněným
Podmíněná pravděpodobnost, náhodná veličina a způsoby jejího popisu Ing. Michael Rost, Ph.D. Podmíněná pravděpodobnost Pokud je jev A vázán na uskutečnění jevu B, pak tento jev nazýváme jevem podmíněným
Markovovy modely v Bioinformatice
 Markovovy modely v Bioinformatice Outline Markovovy modely obecně Profilové HMM Další použití HMM v Bioinformatice Analýza biologických sekvencí Biologické sekvence: DNA,RNA,protein prim.str. Sekvenování
Markovovy modely v Bioinformatice Outline Markovovy modely obecně Profilové HMM Další použití HMM v Bioinformatice Analýza biologických sekvencí Biologické sekvence: DNA,RNA,protein prim.str. Sekvenování
Markov Chain Monte Carlo. Jan Kracík.
 Markov Chain Monte Carlo Jan Kracík jan.kracik@vsb.cz Princip Monte Carlo integrace Cílem je (přibližný) výpočet integrálu I(g) = E f [g(x)] = g(x)f (x)dx. (1) Umíme-li generovat nezávislé vzorky x (1),
Markov Chain Monte Carlo Jan Kracík jan.kracik@vsb.cz Princip Monte Carlo integrace Cílem je (přibližný) výpočet integrálu I(g) = E f [g(x)] = g(x)f (x)dx. (1) Umíme-li generovat nezávislé vzorky x (1),
Výpočet nejistot metodou Monte carlo
 Výpočet nejistot metodou Monte carlo Mgr. Martin Šíra, Ph.D. (ČMI, Brno) červen 2012 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. p. 1 Výpočty nejistot
Výpočet nejistot metodou Monte carlo Mgr. Martin Šíra, Ph.D. (ČMI, Brno) červen 2012 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. p. 1 Výpočty nejistot
Moderní systémy pro získávání znalostí z informací a dat
 Moderní systémy pro získávání znalostí z informací a dat Jan Žižka IBA Institut biostatistiky a analýz PřF & LF, Masarykova universita Kamenice 126/3, 625 00 Brno Email: zizka@iba.muni.cz Bioinformatika:
Moderní systémy pro získávání znalostí z informací a dat Jan Žižka IBA Institut biostatistiky a analýz PřF & LF, Masarykova universita Kamenice 126/3, 625 00 Brno Email: zizka@iba.muni.cz Bioinformatika:
Zada ní 1. Semina rní pra ce z pr edme tu Matematický software (KI/MSW)
") Zada ní. Semina rní pra ce z pr edme tu Matematický software (KI/MSW) Datum zadání: 5.. 06 Podmínky vypracování: - Seminární práce se skládá z programové části (kódy v Matlabu) a textové části (protokol
Zada ní. Semina rní pra ce z pr edme tu Matematický software (KI/MSW) Datum zadání: 5.. 06 Podmínky vypracování: - Seminární práce se skládá z programové části (kódy v Matlabu) a textové části (protokol
Pravděpodobnost, náhoda, kostky
 Pravděpodobnost, náhoda, kostky Radek Pelánek IV122, jaro 2015 Výhled pravděpodobnost náhodná čísla lineární regrese detekce shluků Dnes lehce nesourodá směs úloh souvisejících s pravděpodobností krátké
Pravděpodobnost, náhoda, kostky Radek Pelánek IV122, jaro 2015 Výhled pravděpodobnost náhodná čísla lineární regrese detekce shluků Dnes lehce nesourodá směs úloh souvisejících s pravděpodobností krátké
Kombinatorická minimalizace
 Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Multirobotická kooperativní inspekce
 Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
Multirobotická kooperativní inspekce prostředí Diplomová práce Multirobotická kooperativní inspekce prostředí Diplomová práce Intelligent and Mobile Robotics Group Laboratory for Intelligent Decision Making
Odhady - Sdružené rozdělení pravděpodobnosti
 Odhady - Sdružené rozdělení pravděpodobnosti 4. listopadu 203 Kdybych chtěl znát maximum informací o náhodné veličině, musel bych znát všechny hodnoty, které mohou padnout, a jejich pravděpodobnosti. Tedy
Odhady - Sdružené rozdělení pravděpodobnosti 4. listopadu 203 Kdybych chtěl znát maximum informací o náhodné veličině, musel bych znát všechny hodnoty, které mohou padnout, a jejich pravděpodobnosti. Tedy
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Usuzování za neurčitosti
 Usuzování za neurčitosti 25.11.2014 8-1 Usuzování za neurčitosti Hypotetické usuzování a zpětná indukce Míry postačitelnosti a nezbytnosti Kombinace důkazů Šíření pravděpodobnosti v inferenčních sítích
Usuzování za neurčitosti 25.11.2014 8-1 Usuzování za neurčitosti Hypotetické usuzování a zpětná indukce Míry postačitelnosti a nezbytnosti Kombinace důkazů Šíření pravděpodobnosti v inferenčních sítích
Pojmy z kombinatoriky, pravděpodobnosti, znalosti z kapitoly náhodná veličina, znalost parciálních derivací, dvojného integrálu.
 6. NÁHODNÝ VEKTOR Průvodce studiem V počtu pravděpodobnosti i v matematické statistice se setkáváme nejen s náhodnými veličinami, jejichž hodnotami jsou reálná čísla, ale i s takovými, jejichž hodnotami
6. NÁHODNÝ VEKTOR Průvodce studiem V počtu pravděpodobnosti i v matematické statistice se setkáváme nejen s náhodnými veličinami, jejichž hodnotami jsou reálná čísla, ale i s takovými, jejichž hodnotami
Value at Risk. Karolína Maňáková
 Value at Risk Karolína Maňáková Value at risk Historická metoda Model-Building přístup Lineární model variance a kovariance Metoda Monte Carlo Stress testing a Back testing Potenciální ztráta s danou pravděpodobností
Value at Risk Karolína Maňáková Value at risk Historická metoda Model-Building přístup Lineární model variance a kovariance Metoda Monte Carlo Stress testing a Back testing Potenciální ztráta s danou pravděpodobností
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
Pravděpodobnostní (Markovské) metody plánování, MDP - obsah
 metody plánování, MDP - obsah") Pravděpodobnostní (Markovské) metody plánování, MDP - obsah Pravděpodobnostní plánování - motivace. Nejistota ve výběr akce Markovské rozhodovací procesy Strategie plán (control policy) Částečně pozorovatelné
Pravděpodobnostní (Markovské) metody plánování, MDP - obsah Pravděpodobnostní plánování - motivace. Nejistota ve výběr akce Markovské rozhodovací procesy Strategie plán (control policy) Částečně pozorovatelné
prof. RNDr. Roman Kotecký DrSc., Dr. Rudolf Blažek, PhD Pravděpodobnost a statistika Katedra teoretické informatiky Fakulta informačních technologií
 prof. RNDr. Roman Kotecký DrSc., Dr. Rudolf Blažek, PhD Katedra teoretické informatiky Fakulta informačních technologií České vysoké učení technické v Praze c Rudolf Blažek, Roman Kotecký, 2011 Pravděpodobnost
prof. RNDr. Roman Kotecký DrSc., Dr. Rudolf Blažek, PhD Katedra teoretické informatiky Fakulta informačních technologií České vysoké učení technické v Praze c Rudolf Blažek, Roman Kotecký, 2011 Pravděpodobnost
oddělení Inteligentní Datové Analýzy (IDA)
") Vytěžování dat Filip Železný Katedra počítačů oddělení Inteligentní Datové Analýzy (IDA) 22. září 2014 Filip Železný (ČVUT) Vytěžování dat 22. září 2014 1 / 25 Odhad rozdělení Úloha: Vstup: data D = {
Vytěžování dat Filip Železný Katedra počítačů oddělení Inteligentní Datové Analýzy (IDA) 22. září 2014 Filip Železný (ČVUT) Vytěžování dat 22. září 2014 1 / 25 Odhad rozdělení Úloha: Vstup: data D = {
Princip metody Transport částic Monte Carlo v praxi. Metoda Monte Carlo. pro transport částic. Václav Hanus. Koncepce informatické fyziky, FJFI ČVUT
 pro transport částic Koncepce informatické fyziky, FJFI ČVUT Obsah Princip metody 1 Princip metody Náhodná procházka 2 3 Kódy pro MC Příklady použití Princip metody Náhodná procházka Příroda má náhodný
pro transport částic Koncepce informatické fyziky, FJFI ČVUT Obsah Princip metody 1 Princip metody Náhodná procházka 2 3 Kódy pro MC Příklady použití Princip metody Náhodná procházka Příroda má náhodný
Odečítání pozadí a sledování lidí z nehybné kamery. Ondřej Šerý
 Odečítání pozadí a sledování lidí z nehybné kamery Ondřej Šerý Plán Motivace a popis úlohy Rozdělení úlohy na tři části Detekce pohybu Detekce objektů Sledování objektů Rozbor každé z částí a nástin několika
Odečítání pozadí a sledování lidí z nehybné kamery Ondřej Šerý Plán Motivace a popis úlohy Rozdělení úlohy na tři části Detekce pohybu Detekce objektů Sledování objektů Rozbor každé z částí a nástin několika
Pravděpodobnost, náhoda, kostky
 Pravděpodobnost, náhoda, kostky Radek Pelánek IV122 Výhled pravděpodobnost náhodná čísla lineární regrese detekce shluků Dnes lehce nesourodá směs úloh souvisejících s pravděpodobností připomenutí, souvislosti
Pravděpodobnost, náhoda, kostky Radek Pelánek IV122 Výhled pravděpodobnost náhodná čísla lineární regrese detekce shluků Dnes lehce nesourodá směs úloh souvisejících s pravděpodobností připomenutí, souvislosti
Bayesian Networks. The graph represents conditional independencies of the join probability distribution Π X V P(X pa(x)).
).") Bayesian Networks Definition (Bayesian Network) Bayesian network is a pair (G, P), where G = (V, E) is a DAG (directed acyclic graph with set of vertexes V and set of edges E) and P is a list of conditional
Bayesian Networks Definition (Bayesian Network) Bayesian network is a pair (G, P), where G = (V, E) is a DAG (directed acyclic graph with set of vertexes V and set of edges E) and P is a list of conditional
Neuronové sítě (11. přednáška)
") Neuronové sítě (11. přednáška) Machine Learning Naučit stroje se učit O co jde? Máme model výpočtu (t.j. výpočetní postup jednoznačně daný vstupy a nějakými parametry), chceme najít vhodné nastavení parametrů,
Neuronové sítě (11. přednáška) Machine Learning Naučit stroje se učit O co jde? Máme model výpočtu (t.j. výpočetní postup jednoznačně daný vstupy a nějakými parametry), chceme najít vhodné nastavení parametrů,
SEBELOKALIZACE MOBILNÍCH ROBOTŮ. Tomáš Jílek
 SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
SEBELOKALIZACE MOBILNÍCH ROBOTŮ Tomáš Jílek Sebelokalizace Autonomní určení pozice a orientace robotu ve zvoleném souřadnicovém systému Souřadnicové systémy Globální / lokální WGS-84, ETRS-89 globální
VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ. #2 Nejistoty měření
 VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ # Nejistoty měření Přesnost měření Klasický způsob vyjádření přesnosti měření chyba měření: Absolutní chyba X = X M X(S) Relativní chyba δ X = X(M) X(S) - X(M) je naměřená hodnota
VYSOKONAPĚŤOVÉ ZKUŠEBNICTVÍ # Nejistoty měření Přesnost měření Klasický způsob vyjádření přesnosti měření chyba měření: Absolutní chyba X = X M X(S) Relativní chyba δ X = X(M) X(S) - X(M) je naměřená hodnota
Kartografické modelování V Topologické překrytí - Overlay
 Kartografické modelování V Topologické překrytí - Overlay jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech
Kartografické modelování V Topologické překrytí - Overlay jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech
8 Střední hodnota a rozptyl
 Břetislav Fajmon, UMAT FEKT, VUT Brno Této přednášce odpovídá kapitola 10 ze skript [1]. Také je k dispozici sbírka úloh [2], kde si můžete procvičit příklady z kapitol 2, 3 a 4. K samostatnému procvičení
Břetislav Fajmon, UMAT FEKT, VUT Brno Této přednášce odpovídá kapitola 10 ze skript [1]. Také je k dispozici sbírka úloh [2], kde si můžete procvičit příklady z kapitol 2, 3 a 4. K samostatnému procvičení
Teorie rozhodování (decision theory)
") Umělá inteligence II Roman Barták, KTIML roman.bartak@mff.cuni.cz http://ktiml.mff.cuni.cz/~bartak Teorie pravděpodobnosti (probability theory) popisuje v co má agent věřit na základě pozorování. Teorie
Umělá inteligence II Roman Barták, KTIML roman.bartak@mff.cuni.cz http://ktiml.mff.cuni.cz/~bartak Teorie pravděpodobnosti (probability theory) popisuje v co má agent věřit na základě pozorování. Teorie
Cvičné texty ke státní maturitě z matematiky
 Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Složitost 1.1 Opera ní a pam ová složitost 1.2 Opera ní složitost v pr rném, nejhorším a nejlepším p ípad 1.3 Asymptotická složitost
 1 Složitost 1.1 Operační a paměťová složitost Nezávislé určení na konkrétní implementaci Několik typů operací = sčítání T+, logické T L, přiřazení T A(assign), porovnání T C(compare), výpočet adresy pole
1 Složitost 1.1 Operační a paměťová složitost Nezávislé určení na konkrétní implementaci Několik typů operací = sčítání T+, logické T L, přiřazení T A(assign), porovnání T C(compare), výpočet adresy pole
Vyhněte se katastrofám pomocí výpočetní matematiky
 Vyhněte se katastrofám pomocí výpočetní matematiky Stefan Ratschan Ústav informatiky Akademie věd ČR Stefan Ratschan Vyhněte se katastrofám 1 / 29 x. x 2 = 2 Kvíz x. x 2 = 2 x. x 2 7 p q x. x 2 + px +
Vyhněte se katastrofám pomocí výpočetní matematiky Stefan Ratschan Ústav informatiky Akademie věd ČR Stefan Ratschan Vyhněte se katastrofám 1 / 29 x. x 2 = 2 Kvíz x. x 2 = 2 x. x 2 7 p q x. x 2 + px +
ALGORITMY A DATOVÉ STRUKTURY
 Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Název tématického celku: Cíl: ALGORITMY A DATOVÉ STRUKTURY Metodický list č. 1 Časová složitost algoritmů Základním cílem tohoto tematického celku je vysvětlení potřebných pojmů a definic nutných k popisu
Marta Vomlelová marta@ktiml.mff.cuni.cz
 Strojové učení Úvod, lineární regrese Marta Vomlelová marta@ktiml.mff.cuni.cz References [1] P. Berka. Dobývání znalostí z databází. Academia, 2003. [2] T. Hastie, R. Tishirani, and J. Friedman. The Elements
Strojové učení Úvod, lineární regrese Marta Vomlelová marta@ktiml.mff.cuni.cz References [1] P. Berka. Dobývání znalostí z databází. Academia, 2003. [2] T. Hastie, R. Tishirani, and J. Friedman. The Elements
VK CZ.1.07/2.2.00/
 Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Robotika Tvorba map v robotice - MRBT 3. března 2015 Ing. František Burian Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193 v pojetí mobilní
Strojové učení Marta Vomlelová
 Strojové učení Marta Vomlelová marta@ktiml.mff.cuni.cz KTIML, S303 Literatura 1.T. Hastie, R. Tishirani, and J. Friedman. The Elements of Statistical Learning, Data Mining, Inference and Prediction. Springer
Strojové učení Marta Vomlelová marta@ktiml.mff.cuni.cz KTIML, S303 Literatura 1.T. Hastie, R. Tishirani, and J. Friedman. The Elements of Statistical Learning, Data Mining, Inference and Prediction. Springer
Algoritmy a struktury neuropočítačů ASN - P11
 Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
Aplikace UNS při rozpoznání obrazů Základní úloha segmentace obrazu rozdělení obrazu do několika významných oblastí klasifikační úloha, clusterová analýza target Metody Kohonenova metoda KSOM Kohonenova
přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat
 Zkouška ISR 2013 přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat 1. Rozdílné principy u induktivního a deduktivního
Zkouška ISR 2013 přetrénování = ztráta schopnosti generalizovat vlivem přílišného zaměření klasifikátorů na rozeznávání pouze konkrétních trénovacích dat 1. Rozdílné principy u induktivního a deduktivního
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Distribuované sledování paprsku
 Distribuované sledování paprsku 1996-2015 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz DistribRT 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 24 Distribuované
Distribuované sledování paprsku 1996-2015 Josef Pelikán, CGG MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz DistribRT 2015 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 24 Distribuované
USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING
 USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING Eva Minaříková Institute for Research in School Education, Faculty of Education, Masaryk University Structure of the presentation What can we as teachers
USING VIDEO IN PRE-SET AND IN-SET TEACHER TRAINING Eva Minaříková Institute for Research in School Education, Faculty of Education, Masaryk University Structure of the presentation What can we as teachers
1. Statistická analýza dat Jak vznikají informace Rozložení dat
 1. Statistická analýza dat Jak vznikají informace Rozložení dat J. Jarkovský, L. Dušek, S. Littnerová, J. Kalina Význam statistické analýzy dat Sběr a vyhodnocování dat je způsobem k uchopení a pochopení
1. Statistická analýza dat Jak vznikají informace Rozložení dat J. Jarkovský, L. Dušek, S. Littnerová, J. Kalina Význam statistické analýzy dat Sběr a vyhodnocování dat je způsobem k uchopení a pochopení
Dobývání znalostí. Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze
 Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Pravděpodobnost a učení Doc. RNDr. Iveta Mrázová,
Dobývání znalostí Doc. RNDr. Iveta Mrázová, CSc. Katedra teoretické informatiky Matematicko-fyzikální fakulta Univerzity Karlovy v Praze Dobývání znalostí Pravděpodobnost a učení Doc. RNDr. Iveta Mrázová,
Semestrální písemka BMA3 - termín varianta A13 vzorové řešení
 Semestrální písemka BMA3 - termín 6.1.9 - varianta A13 vzorové řešení Každý příklad je hodnocen maximálně 18 body, z toho část a) 1 body a část b) body. Mezivýsledky při výpočtech zaokrouhlujte alespoň
Semestrální písemka BMA3 - termín 6.1.9 - varianta A13 vzorové řešení Každý příklad je hodnocen maximálně 18 body, z toho část a) 1 body a část b) body. Mezivýsledky při výpočtech zaokrouhlujte alespoň
PRAVDĚPODOBNOST A STATISTIKA
 PRAVDĚPODOBNOST A STATISTIKA Náhodná proměnná Náhodná veličina slouží k popisu výsledku pokusu. Před provedením pokusu jeho výsledek a tedy ani sledovanou hodnotu neznáme. Přesto bychom chtěli tento pokus
PRAVDĚPODOBNOST A STATISTIKA Náhodná proměnná Náhodná veličina slouží k popisu výsledku pokusu. Před provedením pokusu jeho výsledek a tedy ani sledovanou hodnotu neznáme. Přesto bychom chtěli tento pokus
1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností,
 KMA/SZZS1 Matematika 1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností, operace s limitami. 2. Limita funkce
KMA/SZZS1 Matematika 1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností, operace s limitami. 2. Limita funkce
Počítačový model plazmatu. Vojtěch Hrubý listopad 2007
 Počítačový model plazmatu Vojtěch Hrubý listopad 2007 Situace Zajímá nás, co se děje v okolí kovové sondy ponořené do plazmatu. Na válcovou sondu přivedeme napětí U Očekáváme, že se okolo sondy vytvoří
Počítačový model plazmatu Vojtěch Hrubý listopad 2007 Situace Zajímá nás, co se děje v okolí kovové sondy ponořené do plazmatu. Na válcovou sondu přivedeme napětí U Očekáváme, že se okolo sondy vytvoří
Podobnostní transformace
 Schurova věta 1 Podobnostní transformace a výpočet vlastních čísel Obecný princip: Úloha: Řešíme-li matematickou úlohu, je často velmi vhodné hledat její ekvivalentní formulaci tak, aby se řešení úlohy
Schurova věta 1 Podobnostní transformace a výpočet vlastních čísel Obecný princip: Úloha: Řešíme-li matematickou úlohu, je často velmi vhodné hledat její ekvivalentní formulaci tak, aby se řešení úlohy
TERMINOLOGIE ... NAMĚŘENÁ DATA. Radek Mareček PŘEDZPRACOVÁNÍ DAT. funkční skeny
 PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
PŘEDZPRACOVÁNÍ DAT Radek Mareček TERMINOLOGIE Session soubor skenů nasnímaných během jednoho běhu stimulačního paradigmatu (řádově desítky až stovky skenů) Sken jeden nasnímaný objem... Voxel elementární
Téma 1: Spolehlivost a bezpečnost stavebních nosných konstrukcí
 Téma 1: Spolehlivost a bezpečnost stavebních nosných konstrukcí Přednáška z předmětu: Spolehlivost a bezpečnost staveb 4. ročník bakalářského studia Katedra stavební mechaniky Fakulta stavební Vysoká škola
Téma 1: Spolehlivost a bezpečnost stavebních nosných konstrukcí Přednáška z předmětu: Spolehlivost a bezpečnost staveb 4. ročník bakalářského studia Katedra stavební mechaniky Fakulta stavební Vysoká škola
2. Schurova věta. Petr Tichý. 3. října 2012
 2. Schurova věta Petr Tichý 3. října 2012 1 Podobnostní transformace a výpočet vlastních čísel Obecný princip: Úloha: Řešíme-li matematickou úlohu, je často velmi vhodné hledat její ekvivalentní formulaci
2. Schurova věta Petr Tichý 3. října 2012 1 Podobnostní transformace a výpočet vlastních čísel Obecný princip: Úloha: Řešíme-li matematickou úlohu, je často velmi vhodné hledat její ekvivalentní formulaci
X = x, y = h(x) Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní
 Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní") ..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
Zpětnovazební učení Michaela Walterová Jednoocí slepým,
 Zpětnovazební učení Michaela Walterová Jednoocí slepým, 17. 4. 2019 V minulých dílech jste viděli Tři paradigmata strojového učení: 1) Učení s učitelem (supervised learning) Trénovací data: vstup a požadovaný
Zpětnovazební učení Michaela Walterová Jednoocí slepým, 17. 4. 2019 V minulých dílech jste viděli Tři paradigmata strojového učení: 1) Učení s učitelem (supervised learning) Trénovací data: vstup a požadovaný
Intervalová data a výpočet některých statistik
 Intervalová data a výpočet některých statistik Milan Hladík 1 Michal Černý 2 1 Katedra aplikované matematiky Matematicko-fyzikální fakulta Univerzita Karlova 2 Katedra ekonometrie Fakulta informatiky a
Intervalová data a výpočet některých statistik Milan Hladík 1 Michal Černý 2 1 Katedra aplikované matematiky Matematicko-fyzikální fakulta Univerzita Karlova 2 Katedra ekonometrie Fakulta informatiky a
Pseudospektrální metody
 Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
NP-ÚPLNÉ PROBLÉMY. Doc. RNDr. Josef Kolář, CSc. Katedra teoretické informatiky, FIT České vysoké učení technické v Praze
 NP-ÚPLNÉ PROBLÉMY Doc. RNDr. Josef Kolář, CSc. Katedra teoretické informatiky, FIT České vysoké učení technické v Praze BI-GRA, LS 2010/2011, Lekce 13 Evropský sociální fond Praha & EU: Investujeme do
NP-ÚPLNÉ PROBLÉMY Doc. RNDr. Josef Kolář, CSc. Katedra teoretické informatiky, FIT České vysoké učení technické v Praze BI-GRA, LS 2010/2011, Lekce 13 Evropský sociální fond Praha & EU: Investujeme do
Interpolace Lagrangeovy polynomy. 29. října 2012
 Interpolace Lagrangeovy polynomy Michal Čihák 29. října 2012 Problematika interpolace V praxi máme často k dispozici údaje z různých měření tzv. data. Data mohou mít například podobu n uspořádaných dvojic
Interpolace Lagrangeovy polynomy Michal Čihák 29. října 2012 Problematika interpolace V praxi máme často k dispozici údaje z různých měření tzv. data. Data mohou mít například podobu n uspořádaných dvojic
Generování sítě konečných prvků
 Generování sítě konečných prvků Jaroslav Beran Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování vlastností
Generování sítě konečných prvků Jaroslav Beran Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování vlastností
3. Měření efektivní hodnoty, výkonu a spotřeby energie
 3. Měření efektivní hodnoty, výkonu a spotřeby energie přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček: Elektrická měření
3. Měření efektivní hodnoty, výkonu a spotřeby energie přednášky A3B38SME Senzory a měření zdroje převzatých obrázků: pokud není uvedeno jinak, zdrojem je monografie Haasz, Sedláček: Elektrická měření
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta strojního inženýrství Ústav automatizace a informatiky
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta strojního inženýrství Ústav automatizace a informatiky Ing. Milan Turek INTELIGENTNÍ ŘÍDÍCÍ ČLEN AKTIVNÍHO MAGNETICKÉHO LOŽISKA INTELIGENT CONTROLLER OF ACTIVE MAGNETIC
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta strojního inženýrství Ústav automatizace a informatiky Ing. Milan Turek INTELIGENTNÍ ŘÍDÍCÍ ČLEN AKTIVNÍHO MAGNETICKÉHO LOŽISKA INTELIGENT CONTROLLER OF ACTIVE MAGNETIC
Bayesovská klasifikace
 Bayesovská klasifikace založeno na Bayesově větě P(H E) = P(E H) P(H) P(E) použití pro klasifikaci: hypotéza s maximální aposteriorní pravděpodobností H MAP = H J právě když P(H J E) = max i P(E H i) P(H
Bayesovská klasifikace založeno na Bayesově větě P(H E) = P(E H) P(H) P(E) použití pro klasifikaci: hypotéza s maximální aposteriorní pravděpodobností H MAP = H J právě když P(H J E) = max i P(E H i) P(H
Integrace. Numerické metody 7. května FJFI ČVUT v Praze
 Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
SOUŘADNICE BODU, VZDÁLENOST BODŮ
 Registrační číslo projektu: CZ.1.07/1.1.14/01.001 SOUŘADNICE BODU, VZDÁLENOST BODŮ SOUŘADNICE BODU NA PŘÍMCE ČÍSELNÁ OSA na přímce je určena počátkem O a jednotkou měření. Libovolný bod A na číselné ose
Registrační číslo projektu: CZ.1.07/1.1.14/01.001 SOUŘADNICE BODU, VZDÁLENOST BODŮ SOUŘADNICE BODU NA PŘÍMCE ČÍSELNÁ OSA na přímce je určena počátkem O a jednotkou měření. Libovolný bod A na číselné ose
Unbounded Model Checking
 Unbounded Model Checking Stefan Ratschan Katedra číslicového návrhu Fakulta informačních technologíı České vysoké učení technické v Praze 25. října 2011 Evropský sociální fond Praha & EU: Investujeme do
Unbounded Model Checking Stefan Ratschan Katedra číslicového návrhu Fakulta informačních technologíı České vysoké učení technické v Praze 25. října 2011 Evropský sociální fond Praha & EU: Investujeme do
Výpočet na gridu a LM TaskPooler
 Dobývání znalostí z databází MI-KDD ZS 2011 Přednáška 10 Výpočet na gridu a LM TaskPooler v systému LISp-Miner (c) 2011 Ing. M. Šimůnek, Ph.D. KIZI, Fakulta informatiky a statistiky, VŠE Praha Evropský
Dobývání znalostí z databází MI-KDD ZS 2011 Přednáška 10 Výpočet na gridu a LM TaskPooler v systému LISp-Miner (c) 2011 Ing. M. Šimůnek, Ph.D. KIZI, Fakulta informatiky a statistiky, VŠE Praha Evropský
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
SENZORY PRO ROBOTIKU
 1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
1/13 SENZORY PRO ROBOTIKU Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz http://cmp.felk.cvut.cz/ hlavac ROBOTICKÉ SENZORY - PŘEHLED
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Predikce roční spotřeby zemního plynu po ceníkových pásmech
 Predikce roční spotřeby zemního plynu po ceníkových pásmech Ondřej Konár, Marek Brabec, Ivan Kasanický, Marek Malý, Emil Pelikán Ústav informatiky AV ČR, v.v.i. ROBUST 2014 Jetřichovice 20. ledna 2014
Predikce roční spotřeby zemního plynu po ceníkových pásmech Ondřej Konár, Marek Brabec, Ivan Kasanický, Marek Malý, Emil Pelikán Ústav informatiky AV ČR, v.v.i. ROBUST 2014 Jetřichovice 20. ledna 2014
Výpočetní modely pro rozpoznávání bezkontextových jazyků zásobníkové automaty LL(k) a LR(k) analyzátory
 a LR(k) analyzátory") Plán přednášky Výpočetní modely pro rozpoznávání bezkontextových jazyků zásobníkové automaty LL(k) a LR(k) analyzátory Obecný algoritmus pro parsování bezkontextových jazyků dynamické programování 1 Zásobníkový
Plán přednášky Výpočetní modely pro rozpoznávání bezkontextových jazyků zásobníkové automaty LL(k) a LR(k) analyzátory Obecný algoritmus pro parsování bezkontextových jazyků dynamické programování 1 Zásobníkový
Bézierovy křivky Bohumír Bastl KMA/GPM Geometrické a počítačové modelování Bézierovy křivky GPM 1 / 26
 Bézierovy křivky Bohumír Bastl (bastl@kma.zcu.cz) KMA/GPM Geometrické a počítačové modelování Bézierovy křivky GPM 1 / 26 Opakování Spline křivky opakování Bézierovy křivky GPM 2 / 26 Opakování Interpolace
Bézierovy křivky Bohumír Bastl (bastl@kma.zcu.cz) KMA/GPM Geometrické a počítačové modelování Bézierovy křivky GPM 1 / 26 Opakování Spline křivky opakování Bézierovy křivky GPM 2 / 26 Opakování Interpolace
LOKALIZACE ZDROJŮ AE NEURONOVÝMI SÍTĚMI NEZÁVISLE NA ZMĚNÁCH MATERIÁLU A MĚŘÍTKA
 LOKALIZACE ZDROJŮ AE EUROOVÝMI SÍTĚMI EZÁVISLE A ZMĚÁCH MATERIÁLU A MĚŘÍTKA AE SOURCE LOCATIO BY EURAL ETWORKS IDEPEDET O MATERIAL AD SCALE CHAGES Milan CHLADA, Zdeněk PŘEVOROVSKÝ Ústav termomechaniky
LOKALIZACE ZDROJŮ AE EUROOVÝMI SÍTĚMI EZÁVISLE A ZMĚÁCH MATERIÁLU A MĚŘÍTKA AE SOURCE LOCATIO BY EURAL ETWORKS IDEPEDET O MATERIAL AD SCALE CHAGES Milan CHLADA, Zdeněk PŘEVOROVSKÝ Ústav termomechaniky
Stanovení nejistot při výpočtu kontaminace zasaženého území
 Stanovení nejistot při výpočtu kontaminace zasaženého území Michal Balatka Abstrakt Hodnocení ekologického rizika kontaminovaných území představuje komplexní úlohu, která vyžaduje celou řadu vstupních
Stanovení nejistot při výpočtu kontaminace zasaženého území Michal Balatka Abstrakt Hodnocení ekologického rizika kontaminovaných území představuje komplexní úlohu, která vyžaduje celou řadu vstupních
Numerická matematika. Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou
 Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Numerická matematika Zadání 25. Řešení diferenciální rovnice Rungovou Kuttovou metodou Václav Bubník, xbubni01, sk. 60 FIT VUT v Brně, 2004 Obsah Numerická matematika...1 1. Teorie... 3 1.1 Diferenciální
Simulace. Simulace dat. Parametry
 Simulace Simulace dat Menu: QCExpert Simulace Simulace dat Tento modul je určen pro generování pseudonáhodných dat s danými statistickými vlastnostmi. Nabízí čtyři typy rozdělení: normální, logaritmicko-normální,
Simulace Simulace dat Menu: QCExpert Simulace Simulace dat Tento modul je určen pro generování pseudonáhodných dat s danými statistickými vlastnostmi. Nabízí čtyři typy rozdělení: normální, logaritmicko-normální,
Otázky ke státní závěrečné zkoušce
 Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
Otázky ke státní závěrečné zkoušce obor Ekonometrie a operační výzkum a) Diskrétní modely, Simulace, Nelineární programování. b) Teorie rozhodování, Teorie her. c) Ekonometrie. Otázka č. 1 a) Úlohy konvexního
Západočeská univerzita v Plzni Fakulta aplikovaných věd
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky Bakalářská práce Simultánní lokalizace a mapování v budově PLZEŇ, 2017 Petr Štrunc Prohlášení Předkládám tímto k posouzení a
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky Bakalářská práce Simultánní lokalizace a mapování v budově PLZEŇ, 2017 Petr Štrunc Prohlášení Předkládám tímto k posouzení a
Obsah. Předmluva 13. O autorovi 15. Poděkování 16. O odborných korektorech 17. Úvod 19
 Předmluva 13 O autorovi 15 Poděkování 16 O odborných korektorech 17 Úvod 19 Co kniha popisuje 19 Co budete potřebovat 20 Komu je kniha určena 20 Styly 21 Zpětná vazba od čtenářů 22 Errata 22 KAPITOLA 1
Předmluva 13 O autorovi 15 Poděkování 16 O odborných korektorech 17 Úvod 19 Co kniha popisuje 19 Co budete potřebovat 20 Komu je kniha určena 20 Styly 21 Zpětná vazba od čtenářů 22 Errata 22 KAPITOLA 1
METODOU SBRA Miloš Rieger 1, Karel Kubečka 2
 OHYBOVÁ ÚNOSNOST ŽELEZOBETONOVÉHO MOSTNÍHO PRŮŘEZU METODOU SBRA Miloš Rieger 1, Karel Kubečka 2 Abstrakt The determination of the characteristic value of the plastic bending moment resistance of the roadway
OHYBOVÁ ÚNOSNOST ŽELEZOBETONOVÉHO MOSTNÍHO PRŮŘEZU METODOU SBRA Miloš Rieger 1, Karel Kubečka 2 Abstrakt The determination of the characteristic value of the plastic bending moment resistance of the roadway
UČENÍ BEZ UČITELE. Václav Hlaváč
 UČENÍ BEZ UČITELE Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz, http://cmp.felk.cvut.cz/~hlavac 1/22 OBSAH PŘEDNÁŠKY ÚVOD Učení
UČENÍ BEZ UČITELE Václav Hlaváč Fakulta elektrotechnická ČVUT v Praze katedra kybernetiky, Centrum strojového vnímání hlavac@fel.cvut.cz, http://cmp.felk.cvut.cz/~hlavac 1/22 OBSAH PŘEDNÁŠKY ÚVOD Učení
Limitní věty teorie pravděpodobnosti. Jiří Neubauer. Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel
 Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Jestliže opakujeme nezávisle nějaký pokus, můžeme z pozorovaných hodnot sestavit rozdělení relativních četností
Katedra ekonometrie, FVL, UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Jestliže opakujeme nezávisle nějaký pokus, můžeme z pozorovaných hodnot sestavit rozdělení relativních četností
13. cvičení z PSI ledna 2017
 cvičení z PSI - 7 ledna 07 Asymptotické pravděpodobnosti stavů Najděte asymptotické pravděpodobnosti stavů Markovova řetězce s maticí přechodu / / / 0 P / / 0 / 0 0 0 0 0 0 jestliže počáteční stav je Řešení:
cvičení z PSI - 7 ledna 07 Asymptotické pravděpodobnosti stavů Najděte asymptotické pravděpodobnosti stavů Markovova řetězce s maticí přechodu / / / 0 P / / 0 / 0 0 0 0 0 0 jestliže počáteční stav je Řešení: