Biomechanika a lékařské přístroje (specializace biomechanika) Projekt II
|
|
|
- Sabina Jarošová
- před 6 lety
- Počet zobrazení:
Transkript
1 Biomechanika a lékařské přístroje (specializace biomechanika) Projekt II Lukáš Horný lukas.horny@fs.cvut.cz Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS 07
2 Projekt II: O co nám půjde? Otázky odpovědi Konstrukce model konstrukce Teorie Model Pozorování Simulace
3 Co je to (výpočtový) model?
4 Model Výpočtový simulace Formulace úlohy: diferenciální vs. variační deformační vs. silová statická vs. dynamická ij v i u u i j εij εkm ε ε ik jm + Fi = ρ ε ij = + ij = λε kkδ ij + µε ij + = 0 xj t xj x i xk xm xi xj xj xm xi xk Rovnice rovnováhy Geometrické rovnice Konstitutivní rovnice Podmínky (rovnice) kompatibility (deformací) ( ) ( ) ( ) ( ) Ω : x x, x, x = x x, x, x Ω : x, x, x = p x, x, x u i 3 i0 3 F ij Okrajové (+počáteční) podmínky
5 Model Výpočtovým modelem řešíme úlohu pružnosti: Popsat stav napjatosti a deformace v tělese z daného materiálu, dané geometrie, při nějakém zatížení a v nějakých vazbách. Deformační varianta: úlohu zformulujeme pro neznámé posuvy (neznámou kinematiku deformace) Silová varianta: úlohu zformulujeme pro neznámé rozložení napětí
6 Silnostěnná nádoba jako příklad výpočtového modelu
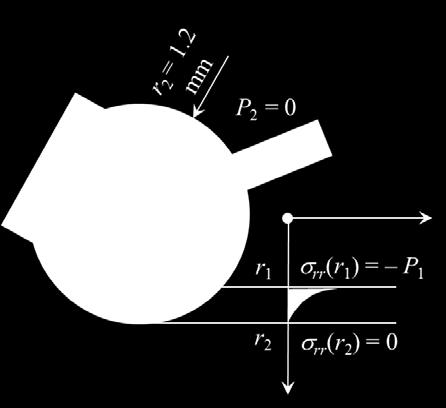
7 Příklad výpočtového modelu: silnostěnná nádoba Rovnice rovnováhy dθ + d r + dr d dz rd dz sin drdz = 0 d rr rr + θθ =0 dr r ( )( ) θ θ rr rr rr θθ Okrajové podmínky rr rr zz ( ri ) ( r ) ( 0) = P = P = P z Geometrické rovnice ε ε ε rr θθ zz = = = du dr u r dw dz ε ε ε rθ θ z zr = 0 = 0 = 0 u( r) + du dr + dr ur ( ) dr Konstitutivní rovnice E ν = ε + ( ε + ε + ε rr rr rr θθ zz ) + ν ν E ν = ε θθ + θθ ( ε + ε + ε rr θθ zz ) + ν ν E ν = ε + ( ε + ε + ε zz zz rr θθ zz ) + ν ν
8 Příklad výpočtového modelu: silnostěnná nádoba Geometrické rovnice ε ε ε rr θθ zz = = = du dr u r dw dz E ν = ε + ( ε + ε + ε rr rr rr θθ zz ) + ν ν E ν = ε θθ + θθ ( ε + ε + ε rr θθ zz ) + ν ν E ν = ε + ( ε + ε + ε zz zz rr θθ zz ) + ν ν ε = zz dw dz w = ε zz z+ C 3 du =,,, ε rr rr ur zz dr du = ε θθ θθ, ur,, zz dr Konstitutivní rovnice = ε rr rr zz = ε θθ θθ = ε zz zz zz d rr rr + θθ =0 dr r ( r,, C, C, C 3) ( r,, C, C, C zz 3) (, C, C ) Okrajové podmínky rr rr zz ( ri ) ( r ) ( 0) = P = P = P z 3 Rovnice rovnováhy rr θθ zz d u du u + = 0 dr r dr r C u= Cr+ r Pr Pr r r = ( P P ) r r r r r Pr Pr r r = + ( P P ) r r r r r = P z Obecné řešení
9 Výpočtovým modelem matematizujeme realitu




10 Matematizace reality výpočtovým modelem s sebou nese rozlišovací úroveň modelu tj. některé jevy jsou zahrnuty a popsány, říkejme, že jsou rozlišovány A některé jevy jsou přirozeně zanedbány jsou pod rozlišovací schopností modelu?
11 Matematizace reality výpočtovým modelem je zjednodušením reality (na danou rozlišovací úroveň) Rovnice rovnováhy ij x j = 0 ε = ijk kj = x x x = x x x = 0 x x x = = = 0 t 3 n t = n 3 t n 3 ε ijk sudá permutace = lichá permutace 0 jinak ( i, j,k) ( i, j,k) Na obrázku možná něco chybí, nebo ne?
12 Matematizace reality výpočtovým modelem t 3 n t = n 3 t n 3 dm = lds l = mn l m m m3 n l = m m m n 3 l m3 m3 m 33 n 3 l ij x j = 0 m x ij j + ε = ijk kj 0 ij ji = x x x = x x x = 0 x x x m m m x x x = 3 m m m x x x = 3 m3 m3 m = 0 x x x 3 0 0
 je model reality!")

13 Matematizace reality výpočtovým modelem je zjednodušením reality. Naše běžné kontinuum (nepolární) je model reality! Model, který funguje, nejsou-li přítomna momentová napětí m. Model, který se nehodí např. pro popis materiálu s distribuovanými elektrickými dipóly. dm = lds s 0 M = 0 s 0 M 0
 λ λ E IK U U J U U = + + X X X X I K K j I I I lnλ ( )")
14 Matematizace reality výpočtovým modelem je zjednodušením reality Geometrické rovnice l L+ L λ = = = + ε L L λ ε ij ui = + xj u x i j versus ( λ ) λ λ E IK U U J U U = + + X X X X I K K j I I I lnλ ( ) λ
15 Matematizace reality výpočtovým modelem je zjednodušením reality Konstitutivní rovnice Nelineární elastoplastické (viskoelastické) chování UHMWPE v tahu = λε δ + µε ij kk ij ij ij versus = λ ik W λ jk versus e ( E) Wp( EE, ) ψ = W + Skutečné napětí [MPa] Skutečné napětí [MPa] ln(λ) [-] ln(λ) [-]


16 Matematizace reality výpočtovým modelem je zjednodušením reality Okrajové podmínky y SE xx x




17 Matematizace reality výpočtovým modelem je zjednodušením reality Okrajové podmínky y SE xy x




18 Matematizace reality výpočtovým modelem q xx M o T xx Geometrie


19 Matematizace reality výpočtovým modelem q xy M o T xy Geometrie


20 Matematizace reality výpočtovým modelem je zjednodušením reality Geometrie HMH
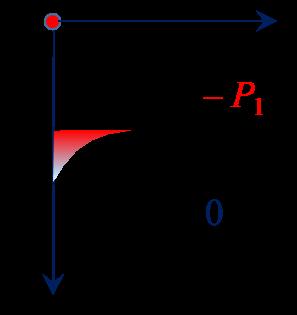
21 Matematizace reality výpočtovým modelem je zjednodušením reality rr rr rp rp = + r r r r r ( P P )



22 Matematizace reality výpočtovým modelem Diskretizace rr





23 Matematizace reality výpočtovým modelem 0 0 rr (r) rr (r) r r r r Diskretizace



24 Matematizace reality výpočtovým modelem 0 rr (r) rr (0 elementů) rr (5 elementů) 0 r r rr (r) Diskretizace r r
: end do: Doba výpočtu t [s] nebo [min] t. ( n ) 6 3 6.")
25 Model má svou cenu # Maple 8 doba výpočtu # inverzní matice k náhodné # matici with(statistics):with(plots): with(linearalgebra): with(optimization): with(randomtools): n:=00: A:=Vector(n): for i from by to n do A[i]:=RandomMatrix(i): end do: Doba výpočtu t [s] nebo [min] t. ( n ) = B:=Vector(n): for i from by to n do st := time(): MatrixInverse(A[i]): time() - st: B[i]:=%: end do: Hodnost náhodné matice n C:=Vector([seq(i,i=..n)]): Q:=add((B[i]-eval(a*(t^b-),t=C[i]))^,i=..n): res:=nlpsolve(q,a=0..0,b=0..0,initialpoint={a=0.00,b=0.8},iterationlimit=000): z 4-core AMD A8-6600K 4. GHz 4 GB z 6 GB RAM p:=plot(vector([seq(i,i=..n)]),b,style=point,symbol=solidcircle,color=red,symbolsize=,axis=[thickness=0.9],axesfont = ["Times", "Roman", ]):p:=plot(eval(a*(t^b-),res[]),t=..00,color=blue,thickness=3):display(p,p);
26 Výpočtový model Výpočtový model je zjednodušením reality. Může být analytický i numerický. Při odvozování rovnic pro analytický popis problému, stejně jako při numerickém řešení, přijímáme mnoho předpokladů, které model definují: o geometrii o kinematice deformace o materiálových vlastnostech o vazbách a zatížení o formě a způsobu rozložení vnitřních sil a jejich intenzity, o počtu integračních bodů o chybě, kterou připouštíme, zvolený systém veličin je také modelový předpoklad (např. časté nezahrnutí teploty vůbec neznamená, že se v reálných situacích tělesa při deformaci neochlazují/nezahřívají)

27 Projekt II: Naše úloha Analytická teorie Experiment na díle MKP simulace Globální experiment pro konstitutivní model Lokální experiment pro konstitutivní model
28 Projekt II: Otázky a odpovědi Otázky odpovědi Shodují se analytické a numerické řešení s experimentem? Nikoliv? A proč? Shodují se globální a lokální materiálové vlastnosti? Nikoliv? A proč?
29 Rozbor analytického řešení tažené stěny s kruhovým otvorem Projekt II
30 Silnostěnná nádoba r Obecné řešení A A rr = + B θθ = + r r B Okrajové podmínky rr ( ) ( ) r = P r = P rr r r P P Konstanty rr rp rp A= P P B= r r r r ( ) Rozložení napětí ve stěně rr θθ rr rp rp = + r r r r r ( ) P P rr rp rp = + r r r r r ( ) P P

31 Nafukování válcové štěrbiny v rozlehlé stěně Tlaková nádoba napětí r = rr r r P ( r ) P ( r ) = = rr 0 Limitní přechod rr f f rr lim = lim lim = lim = r r r r r r r g g r rp rp f f rp = = = = 0 = 0 lim lim lim lim P r r r r r r g g r P Výsledná napětí r r rr = P = = r r 0 θθ P zz
32 Nafukování válcové štěrbiny v rozlehlé stěně Výsledná napětí na r = r r = r r = P = P θθ = P = P rr r r r r = r P Výsledná napětí na r = rr ( r ) P ( r ) = = rr 0 lim rr lim P r r r lim r θθ r = = r = lim P = 0 r r 0
33 Rozlehlá stěna se štěrbinou při rovnoosém tahu Tlaková nádoba napětí ( ) rr r = P = r = r r Limitní přechod rr f f rr lim = lim lim = lim = r r r r r r r g g r rp rp f f rp = = = = r r g g r = lim lim lim lim P r r r r P Výsledná napětí r r rr = θθ = + r r
34 Rozlehlá stěna se štěrbinou při rovnoosém tahu Výsledná napětí na r = r r = rr r = 0 = r r = r r r r θθ = + = r r = r Výsledná napětí na r = r rr = = r r r θθ = + = r r
35 Rozlehlá stěna se štěrbinou při jednoosém tahu y r = r r θ x Jaký je průběh složek tenzoru napětí podél stěny s kruhovým otvorem?
36 Rozlehlá stěna se štěrbinou při jednoosém tahu Využijeme silové formulace úlohy pružnosti Použije předpoklad o rovinné napjatosti a deformaci Nezahrneme objemové síly Použijeme Hookeův zákon a rovnice kompatibility Využijeme (Airyho) funkci napětí Tím vším se nám povede úlohu převést na okrajový problém popsaný jednou rovnicí s jednou neznámou funkcí
37 Rovnice teorie pružnosti cesta k jediné rovnici Rovnice rovnováhy xx xy xz Fx = 0 x y z yx yy yz Fy = 0 x y z zx zy zz Fz = x y z 0 Rovinná napjatost x x xx xy xy + = 0 y yy + = 0 y 3 rovnice rovnice
38 Rovnice teorie pružnosti Hookeův zákon ε ε ε = E = E = E ν ν ν ν εxy = xy E + ν εyz = yz E + ν εzx = zx E ( ( )) xx xx yy zz ( ) ( ) yy yy zz xx ( ( )) zz zz xx yy Rovinná napjatost ε ( ) xx = xx ν yy E ε ( ) yy = yy ν xx E ν ν ε = + = ε + ε E ν + ν εxy = xy E ε = 0 ε = 0 ( ) ( ) zz xx yy xx yy yz zx
39 Rovnice teorie pružnosti Kompatibilita (integrovatelnost) deformace pro úlohu rovinné deformace Geometrické rovnice při rovinné deformaci ε ε ε xx yy xy u = x v = y u = + y v x ε 3 xx = u y y x ε 3 yy v = x xy 3 3 ε xy u v = + xy yx xy ε ε xy y x xy ε xx yy = + Řešením úlohy pružnosti pro rovinnou deformaci může být jen takové pole deformace, které splní: ε ε ε xx yy + = xy y x xy
40 Rovnice teorie pružnosti Kompatibilita deformace ε ε ε xx yy + = xy y x xy Dosadíme konstitutivní rovnice ε ε = E = E ν ν + ν εxy xy E ( ) xx xx yy ( ) yy yy xx Obdržíme yy yy xy xx xx = ν + ν = ( + ν) y x x y xy rovnice
41 Rovnice teorie pružnosti Kompatibilita deformace v napětích xx xx yy yy xy ν + ν = ( + ν) y x x y xy Pravá strana ( + ν) = ( + ν) + ( + ν) xy xy xy xy xy xy Použijeme rovnice rovnováhy x xx xy x xy + = 0 y yy + = 0 y xy xx xy = = y x x y x = = x y y x y xx xy yy xy yy
42 Jediná rovnice je tedy kompatibilita deformace Kompatibilita deformace v napětích xx xx ν + ν = ( + ν) + ( + ν) y x x y xy xy yy yy xy xy a derivované rovnice rovnováhy xy = x y x xy = y x y xx yy rovnice xx xx yy yy = 0 x y x y
43 Airyho funkce napětí φ cesta k jediné funkci xx xx yy yy = 0 x y x y rovnice ale neznámé funkce xx (x,y) a yy (x,y)
44 Airyho funkce napětí φ Zavedeme tzv. Airyho funkci napětí φ = φ(x,y), která z definice splňuje: xx φ φ φ = yy = xy = y x x y

45 Airyho funkce napětí φ Definiční vztahy Airyho funkce napětí φ = φ(x,y) zaručují, že φ splňuje rovnice rovnováhy: 3 3 xx xy φ φ + = = 0 x y xy yxy 3 3 xy yy φ φ + = + = x y xxy yx 0
46 rovnice a funkce pro rovinné ε a yy xx xy φ = x φ = y xx xx yy yy = 0 x y x y φ = x y φ φ φ + + = x x y y Rovnice se nazývá biharmonická (též stěnová) a jejím řešením jsou biharmonické funkce
47 Zápis pomocí nabla a Laplaceova operátoru 4 = = + + x y x y φ φ φ 0 x x y y φ = φ = + + = 4 4
48 Biharmonická rovnice (stěnová) V polárních souřadnicích φ = φ(r,θ) φ φ φ φ rr = + θθ = rθ = r r r θ r r r θ + r r θ + + r r r θ r φ = 0
49 Biharmonická rovnice Tvary řešení φ φ φ xx = yy = xy = y x x y φ ( xy, ) = m= 0 n= 0 m n Amnx y m+ n m+ n> 3 Nepřispívá Závislá A mn y M Čistý ohyb M x ( x, h) ( x, h) ( l, y) ± = 0 ± = ± = 0 h h yy xy xy xx (, ) 0 (, ) h ± l y dy = ± l y ydy = M h xx h l 3 ( xy, ) A y φ = 03
50 Biharmonická rovnice V polárních souřadnicích + + φ ( r, θ) = 0 r r r θ r + θθ rθ φ φ φ φ rr = = = r r r θ r r r θ Separace proměnných a substituce b b (, ) ( ) ( ) kde φ r θ = f r e = f e e r = e θ ξ θ ξ Nový tvar rovnice konstantní koeficienty ( 4) df f 4 f + ( 4 + b ) f 4b f + b ( 4 + b ) f = 0 kde f = dξ Charakteristická rovnice a její kořeny ( a b )( a a b ) = 0 a =± ib a = ± ib
51 Biharmonická rovnice Michellovo řešení (899; Little 973) a3 3 φ( r, θ) = a0 + aln( r) + ar + a3r ln( r) + ( a4 + a5ln( r) + a6r + a7r ln( r) ) θ + ar + arln( r) + + a4r + a5rθ + a6rθln( r) cos ( θ) + r b + br+ brln r + + b4r + b5r + b6r ln r sin + a r + a r + a 3r + a 4r cos n r n= 3 3 n + n n n ( ) θ θ ( ) ( θ) ( n n n n ) ( θ) n + n n n ( bn r bnr bn3r bn4r ) sin( nθ ) n= + ( ) ( ) ( ) ( 4 r, = a + aln r + a r + a r ln r + a r + a r + a r + a ) cos( ) φ θ θ
52 Napětí 4 ( r, ) = a + aln( r) + a r + a r ln( r) + ( a r + a r + a r + a ) cos( ) φ θ θ φ φ φ φ rr = + θθ = rθ = r r r θ r r r θ rr a 6a 6a = a3 + ln r + a + a cos 4 r + + r r 3 ( ( )) 4 ( θ) θθ rθ a 6a = a3 + ln r + a + a ar cos 4 r + + r 4 3 ( 3 ( )) ( θ) 6a3 a4 = a + 6ar sin 4 r r ( θ)
53 Okrajové podmínky xx + yy xx yy xx + yy xx yy yy xx rr = + cos θ + xysin θ θθ = cos θ xysin θ r θ = sin θ + xycos θ ( ) ( ) ( ) ( ) ( ) ( ) y r = ( r r, θ) ( r r, θ) rr = = = = rθ 0 r r θ x rr r θ cos θ ( ) ( =, ) = + ( ) θθ θ θ ( ) ( r =, ) = cos ( ) r θ r θ sin θ ( =, ) = ( )
) 4 ( θ) a 6a = a3 + ln r + a + a ar cos 4 r + + r 4 3 ( 3 ( )) ( θ) 6a3 a4 = a + 6ar sin 4 r r ( θ) a = 0 = a 5 rovnic pro 5 konstant { a, a, a, a, a } 3 3")
54 Určení konstant rr ( r r, ) ( r r, ) = θ = = θ = rθ 0 rr r θ cos θ ( ) ( =, ) = + ( ) θθ θ θ ( ) ( r =, ) = cos ( ) r θ r θ sin θ ( =, ) = ( ) rr θθ rθ a 6a 6a = a3 + ln r + a + a cos 4 r + + r r 3 ( ( )) 4 ( θ) a 6a = a3 + ln r + a + a ar cos 4 r + + r 4 3 ( 3 ( )) ( θ) 6a3 a4 = a + 6ar sin 4 r r ( θ) a = 0 = a 5 rovnic pro 5 konstant { a, a, a, a, a } 3 3 4
55 Pole napětí ij (r,θ) r y r = r θ x rr θθ 4 r 4r 3r = cos r r r 4 r 3r = + cos + 4 r r ( θ) ( θ) rθ 4 r 3r = + sin 4 r r ( θ)
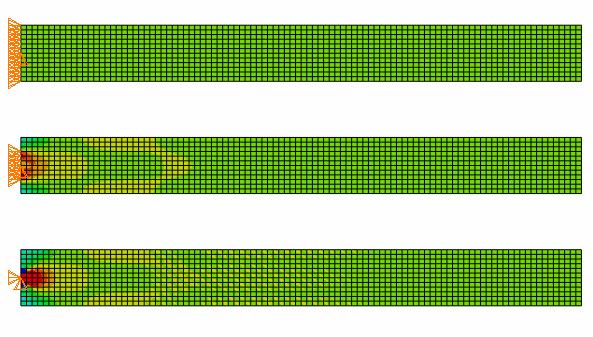
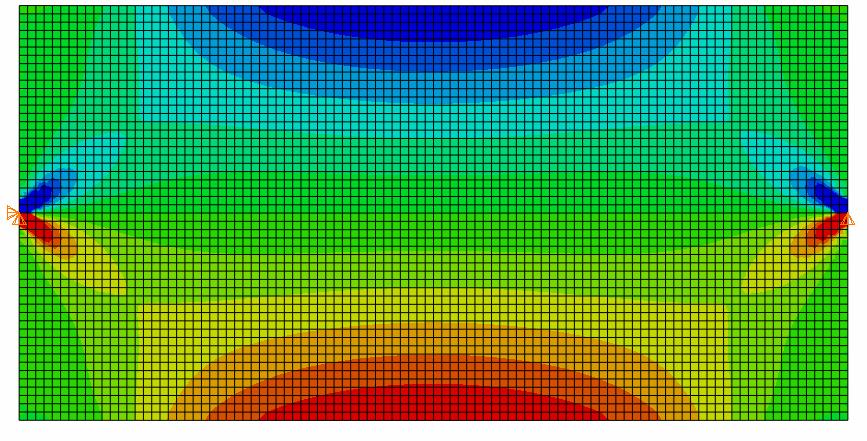
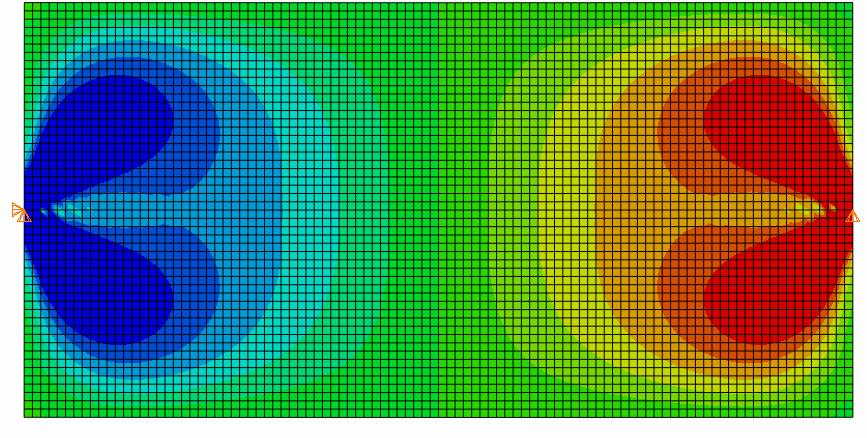
56 Pole napětí r = r = θ 0; π ) ( r = r, ) 0 ( r = r = ) = s ( θ) ( r = r, = θ), = θ =,, co, 0 θ = rr θθ rθ y = = x = r = rr rθ θθ
57 Pole napětí r r ) θ = ; 0 rr 5 3 3,, 0 θθ, 0 = 4 rθ,, 0 = 0 r r r r ( r = = θ = ) = + ( r =, = θ = ) ( r = = θ = ) 4 y rr x θθ r r = = =
58 Pole napětí r r; ) θ = π π 3 3 π 3 rr r =, =, θ = r,, = = = θ = r r = + + r r rθ r 4 θθ 4 π =, =, θ = = 0 θθ rr rθ y x r = = =
59 Co všechno nyní umíme? Najít pole napětí rr, θθ a rθ a vyčíslit je v libovolném bodě [r,θ] Transformovat souřadnice [r,θ] a [x,y] Najít xx, yy, a xy v libovolném bodě [x,y] Pomocí Hookeova zákona najít ε xx, ε yy a ε xy
60 Korelace digitálních obrazů (DIC) metoda pro experimentální určování pole posuvů a deformací Projekt II
 Vyžaduje post-processing (výpočet, který následuje po sejmutí sekvence obrazů) Měřící aparatura DANTEC")
61 DIC Optická metoda pro zjišťování pole posuvů na povrchu objektu D rovinné objekty (monoskopické snímání) 3D zakřivené povrchy (stereoskopické snímání) Vyžaduje post-processing (výpočet, který následuje po sejmutí sekvence obrazů) Měřící aparatura DANTEC DYNAMICS Q450

62 DIC Vzorek musí mít povrchovou úpravu, která bude rozlišitelná po digitalizaci obrazu
 v 8 bitové hloubce (0-55) Síť")
63 Diskretizace vzorku Stupně šedi (jas) v 8 bitové hloubce (0-55) Síť 0x0 px


64 Diskretizace vzorku A6 30 px E 30 px Digitalizovaný jas v 8 bitové hloubce (0-55) reprezentovaný maticí Síť 30x30 px


65 Souřadnice Princip obraz musíme kalibrovat, abychom mohli zavést délkové souřadnice Referenční faseta Referenční konfigurace Deformovaná faseta a konfigurace
,y(x,y)] Materiálový bod P Souřadnice P na dvou různých obrazech (,,,,, ) (,,,,, )")
 = + (, ), (, ) Korelace obrazů je založena na nalezení parametrů a 0,a,.")
66 Korelace po sobě jdoucích obrazů Minimalizace odchylek: referenční vs. zdeformovaný v materiálovém popisu P [X,Y] P [x(x,y),y(x,y)] Materiálový bod P Souřadnice P na dvou různých obrazech (,,,,, ) (,,,,, ) x a a a a X Y = a + a X + a Y + a XY y a a a a X Y = a + a X + a Y + a XY Transformace stupňů šedi v okolí P mezi dvěma obrazy T (, ) = + (, ), (, ) Korelace obrazů je založena na nalezení parametrů a 0,a,..,a 7,g 0,g G( XY) G( XY) { a a a a a a a a g g} min,,,,,,,,,,, xy, 0 ( ) G XY g gg xxy y XY T

67 DIC Aplikace Ex vivo implantace stentu
68 UHMWPE vysokomolekulární polyetylén Projekt II


")
69 Makromolekuly monomer polymerace polymer Etylen PE řetězení Kondenzace aminokyselin vytvářející peptidovou vazbu (a odštěpující HO) polykondenzace

70 Makromolekuly Kolagenní α-šroubovice Fibrila kolagenu I D-periodická rozteč 67 nm
71 Polymery Elastomery Termoplasty Reaktoplasty (termosety, duromery) Biopolymery kaučuk, polybutadien (BR), butadien-styren (SBR), sillikony, polyetylen (PE), akrylonitril-butadien-styren (ABS), polymethylmethakrylát (PMMA), polyamid (PA), polypropylen (PP), poylstyren (PS), polyvinylchlorid (PVC), polytetrafluoretylen (PTFE, Teflon), polyestery (polyetylentereftalat PET, polylaktid PLA, polykaprolakton PCL), termoplastické polyuretany (TPU) epoxidové, fenolové, xylenové, polyesterové, poyluretanové (ad.) pryskyřice; kyanoakryláty polypeptidy/proteiny, nukleové kyseliny (DNA, RNA), polysacharidy,
72 Vysokomolekulární polyetylen - UHMWPE Semikrystalický termoplast S dobrou biokompatibilitou Dobré kluzné a H O-absorbční vlastnosti


73 Vysokomolekulární polyetylen - UHMWPE Vnitřní struktura A její deformace Amorfní oblast Shluky řetězců Krystalické lamely
74 Vysokomolekulární polyetylen - UHMWPE Mechanická odezva Smluvní napětí [MPa] Poměrné prodloužení [%]
75 Vysokomolekulární polyetylen - UHMWPE Mechanická odezva Skutečné napětí [MPa] Skutečné napětí [MPa] ln(λ) [-] ln(λ) [-]
76 Vysokomolekulární polyetylen - UHMWPE Mechanická odezva UHMWPE Teplota Vnitřní stavba (krystalinita, sesítění) Rychlost deformace (krátkodobá paměť) předpona visko Historie deformace (dlouhodobá paměť) přípona plasto Terminologie kolísá
77 Biomechanika a lékařské přístroje (specializace biomechanika) Projekt II
78 Projekt II: Program Laboratoře + simulace Laboratoř mechanických zkoušek tah proužku UHMWPE pro konstitutivní model makroskopicky Kardiovaskulární laboratoř DIC stěny s otvorem Nanoindentační laboratoř mechanické vlastnosti nano škála + lineární harmonická viskoelasticita Numerické simulace MKP Porovnání výsledků v závěrečné prezentaci


79 Projekt II: Otázky a odpovědi Otázky odpovědi Shodují se analytické a numerické řešení s experimentem? Nikoliv? A proč? Shodují se globální a lokální materiálové vlastnosti? Nikoliv? A proč?
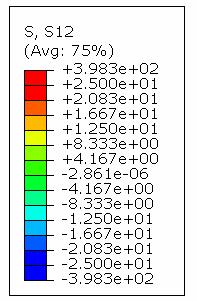
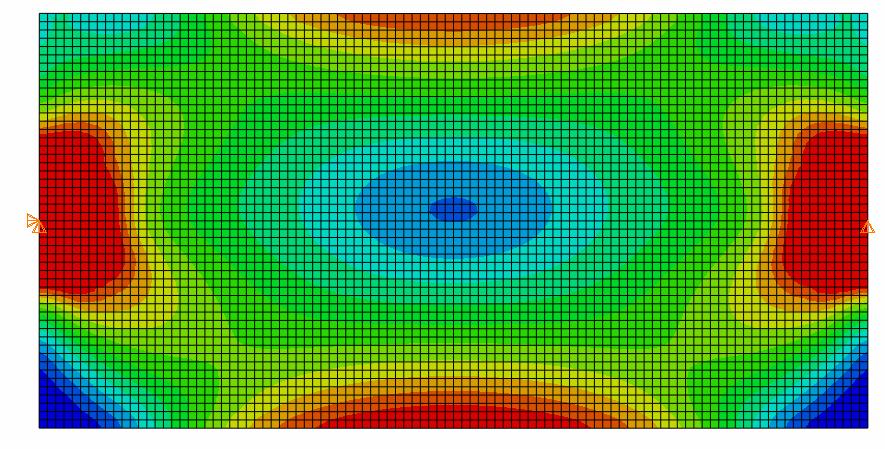
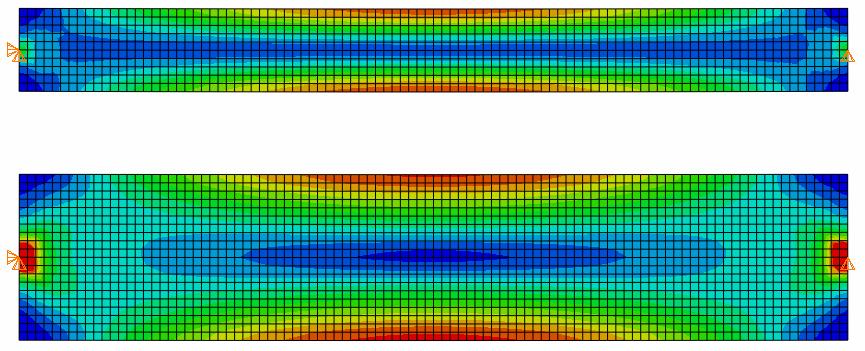
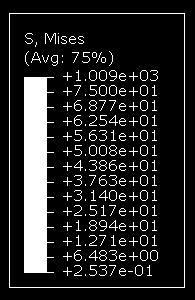
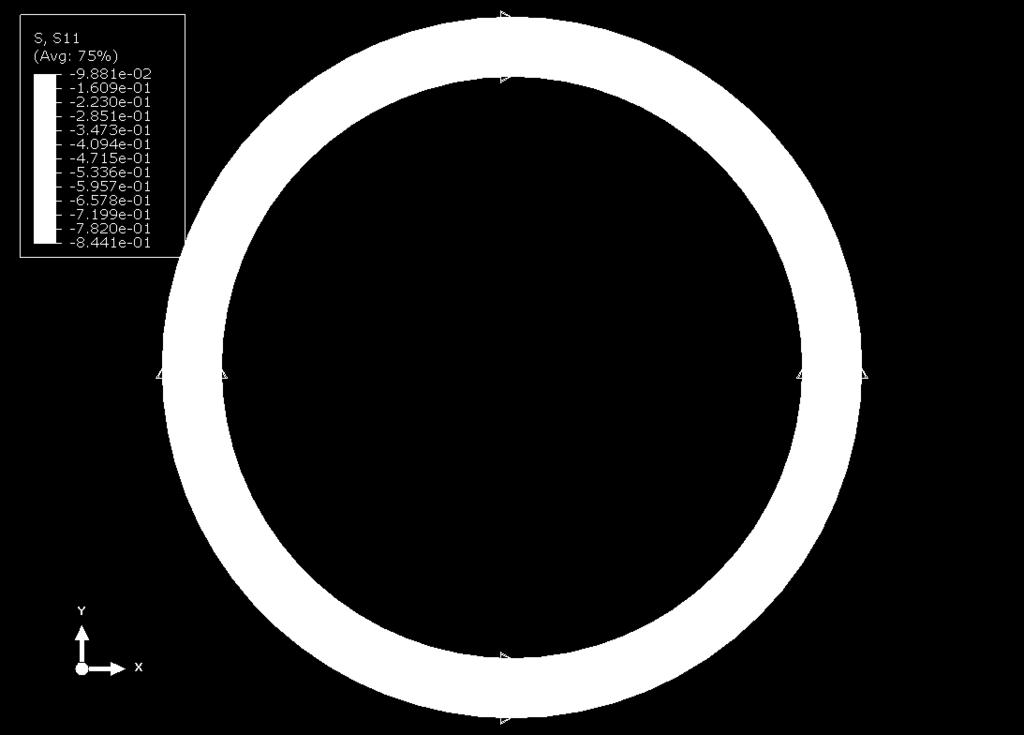
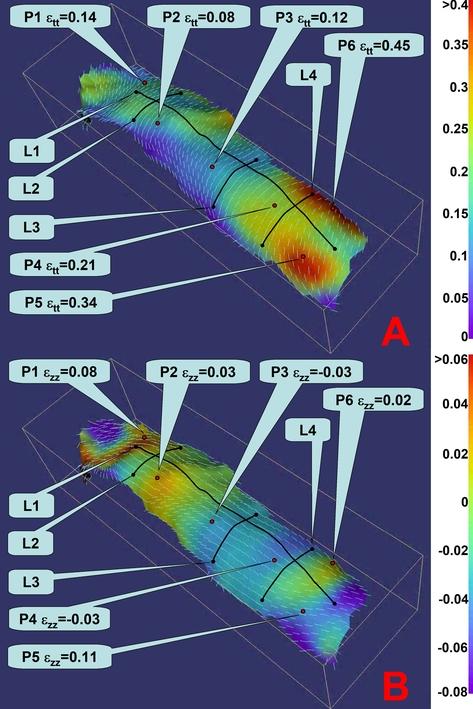
80 Závěr Lukáš Horný Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS Děkuji Petru Tichému za vytvoření barevných map rozložení napětí pomocí programu Abaqus 6.
Biomechanika a lékařské přístroje
 Biomechanika a lékařské přístroje Projekt II Lukáš Horný lukas.horny@fs.cvut.cz Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS 2018 Projekt II: O co nám půjde? Otázky odpovědi Konstrukce model konstrukce
Biomechanika a lékařské přístroje Projekt II Lukáš Horný lukas.horny@fs.cvut.cz Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS 2018 Projekt II: O co nám půjde? Otázky odpovědi Konstrukce model konstrukce
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
ÚVOD DO MODELOVÁNÍ V MECHANICE
 ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
ANALÝZA KONSTRUKCÍ. 5. přednáška
 ANALÝZA KONSTRUKCÍ 5. přednáška Nosné stěny rovinná napjatost Způsoby výpočtu napjatosti: Deformační metodou Primární neznámé: posuny u(,y), v(,y) Výchozí rovnice: statické Silovou metodou Primární neznámá:
ANALÝZA KONSTRUKCÍ 5. přednáška Nosné stěny rovinná napjatost Způsoby výpočtu napjatosti: Deformační metodou Primární neznámé: posuny u(,y), v(,y) Výchozí rovnice: statické Silovou metodou Primární neznámá:
Dvě varianty rovinného problému: rovinná napjatost. rovinná deformace
 Rovinný problém Řešíme plošné konstrukce zatížené a uložené v jejich střednicové rovině. Dvě varianty rovinného problému: rovinná napjatost rovinná deformace 17 Rovinná deformace 1 Obsahuje složky deformace
Rovinný problém Řešíme plošné konstrukce zatížené a uložené v jejich střednicové rovině. Dvě varianty rovinného problému: rovinná napjatost rovinná deformace 17 Rovinná deformace 1 Obsahuje složky deformace
Kritéria porušení laminy
 Kap. 4 Kritéria porušení laminy Inormační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky S ČVU v Praze.. 007-6.. 007 Úvod omové procesy vyvolané v jednosměrovém
Kap. 4 Kritéria porušení laminy Inormační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky S ČVU v Praze.. 007-6.. 007 Úvod omové procesy vyvolané v jednosměrovém
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
1. Náhodný vektor (X, Y ) má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.
 má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.") VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
FAKULTA STAVEBNÍ. Telefon: WWW:
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ ZÁKLADY METODY KONEČNÝCH PRVKŮ Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz WWW: http://fast10.vsb.cz/brozovsky/
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ ZÁKLADY METODY KONEČNÝCH PRVKŮ Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz WWW: http://fast10.vsb.cz/brozovsky/
Změna koeficientů PDR při změně proměnných
 Změna koeficientů PR při změně proměnných Oldřich Vlach oto pojednání doplňuje přednášku M. Šofera na téma Nalezení složek tenzoru napjatosti pro případ rovinné úlohy s povrchem zatíženým kontaktním tlakem
Změna koeficientů PR při změně proměnných Oldřich Vlach oto pojednání doplňuje přednášku M. Šofera na téma Nalezení složek tenzoru napjatosti pro případ rovinné úlohy s povrchem zatíženým kontaktním tlakem
1.1 Shrnutí základních poznatků
 1.1 Shrnutí základních poznatků Pojmem nádoba obvykle označujeme součásti strojů a zařízení, které jsou svým tvarem a charakterem namáhání shodné s dutými tělesy zatíženými vnitřním, popř. i vnějším tlakem.sohledemnatopovažujemezanádobyrůznápotrubíakotlovátělesa,alenapř.i
1.1 Shrnutí základních poznatků Pojmem nádoba obvykle označujeme součásti strojů a zařízení, které jsou svým tvarem a charakterem namáhání shodné s dutými tělesy zatíženými vnitřním, popř. i vnějším tlakem.sohledemnatopovažujemezanádobyrůznápotrubíakotlovátělesa,alenapř.i
Nelineární úlohy při výpočtu konstrukcí s využitím MKP
 Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
1 Ohyb desek - mindlinovské řešení
 1 OHYB DESEK - MINDLINOVSKÉ ŘEŠENÍ 1 1 Ohyb desek - mindlinovské řešení Kinematika přemístění Posun w se po tloušťce desky mění málo (vzhledem k hodnotě průhybu) w(x, y, z) = w(x, y) Normály ke střednicové
1 OHYB DESEK - MINDLINOVSKÉ ŘEŠENÍ 1 1 Ohyb desek - mindlinovské řešení Kinematika přemístění Posun w se po tloušťce desky mění málo (vzhledem k hodnotě průhybu) w(x, y, z) = w(x, y) Normály ke střednicové
diferenciální rovnice verze 1.1
 Diferenciální rovnice vyšších řádů, snižování řádu diferenciální rovnice verze 1.1 1 Úvod Následující text popisuje řešení diferenciálních rovnic, konkrétně diferenciálních rovnic vyšších řádů a snižování
Diferenciální rovnice vyšších řádů, snižování řádu diferenciální rovnice verze 1.1 1 Úvod Následující text popisuje řešení diferenciálních rovnic, konkrétně diferenciálních rovnic vyšších řádů a snižování
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
Rovinná úloha v MKP. (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w
: rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w") Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Cvičení Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí (
 Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA. Telefon: WWW:
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA Bakalářské studium, 4. ročník Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA Bakalářské studium, 4. ročník Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů
 Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
PRUŽNOST A PEVNOST II
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ PRUŽNOST A PEVNOST II Navazující magisterské studium, 1. ročník Alois Materna (přednášky) Jiří Brožovský (cvičení) Kancelář: LP C 303/1
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ PRUŽNOST A PEVNOST II Navazující magisterské studium, 1. ročník Alois Materna (přednášky) Jiří Brožovský (cvičení) Kancelář: LP C 303/1
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
Biomechanika srdečněcévnísoustavy a konstitutivnímodelování
 Biomechanika srdečněcévnísoustavy a konstitutivnímodelování Biomechanika a lékařsképřístroje Biomechanika I LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní ČVUT v Praze M Konstitutivní
Biomechanika srdečněcévnísoustavy a konstitutivnímodelování Biomechanika a lékařsképřístroje Biomechanika I LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní ČVUT v Praze M Konstitutivní
y ds, z T = 1 z ds, kde S = S
 Plošné integrály příklad 5 Určete souřadnice těžiště části roviny xy z =, která leží v prvním oktantu x >, y >, z >. Řešení: ouřadnice těžiště x T, y T a z T homogenní plochy lze určit pomocí plošných
Plošné integrály příklad 5 Určete souřadnice těžiště části roviny xy z =, která leží v prvním oktantu x >, y >, z >. Řešení: ouřadnice těžiště x T, y T a z T homogenní plochy lze určit pomocí plošných
vztažný systém obecné napětí předchozí OBSAH další
 p05 1 5. Deformace těles S deformací jako složkou mechanického pohybu jste se setkali už ve statice. Běžně je chápána jako změna rozměrů a tvaru tělesa. Lze ji popsat změnami vzdáleností různých dvou bodů
p05 1 5. Deformace těles S deformací jako složkou mechanického pohybu jste se setkali už ve statice. Běžně je chápána jako změna rozměrů a tvaru tělesa. Lze ji popsat změnami vzdáleností různých dvou bodů
8. Základy lomové mechaniky. Únava a lomová mechanika Pavel Hutař, Luboš Náhlík
 Únava a lomová mechanika Koncentrace napětí nesingulární koncentrátor napětí singulární koncentrátor napětí 1 σ = σ + a r 2 σ max = σ 1 + 2( / ) r 0 ; σ max Nekonečný pás s eliptickým otvorem [Pook 2000]
Únava a lomová mechanika Koncentrace napětí nesingulární koncentrátor napětí singulární koncentrátor napětí 1 σ = σ + a r 2 σ max = σ 1 + 2( / ) r 0 ; σ max Nekonečný pás s eliptickým otvorem [Pook 2000]
Podstata plastů [1] Polymery
![Podstata plastů [1] Polymery](/thumbs/33/15817342.jpg "Podstata plastů [1] Polymery") PLASTY Podstata plastů [1] Materiály, jejichž podstatnou část tvoří organické makromolekulami látky (polymery). Kromě látek polymerní povahy obsahují plasty ještě přísady (aditiva) jejichž účelem je specifická
PLASTY Podstata plastů [1] Materiály, jejichž podstatnou část tvoří organické makromolekulami látky (polymery). Kromě látek polymerní povahy obsahují plasty ještě přísady (aditiva) jejichž účelem je specifická
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Biomechanika II. Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti. Lukáš Horný
 Biomechanika II Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské
Biomechanika II Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské
Nosné desky. 1. Kirchhoffova teorie ohybu tenkých desek (h/l < 1/10) 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)
 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)") Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
Příklady pro předmět Aplikovaná matematika (AMA) část 1
 část 1") Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
Úvod do parciálních diferenciálních rovnic. 2 Kanonický tvar lineárních PDR 2. řádu pro funkce
 Příklady na cvičení k přednášce NMMA334 Úvod do parciálních diferenciálních rovnic 1 Kanonický tvar lineárních PDR 2. řádu pro funkce dvou proměnných 1. Určete typ parciální diferenciální rovnice u xx
Příklady na cvičení k přednášce NMMA334 Úvod do parciálních diferenciálních rovnic 1 Kanonický tvar lineárních PDR 2. řádu pro funkce dvou proměnných 1. Určete typ parciální diferenciální rovnice u xx
Transformujte diferenciální výraz x f x + y f do polárních souřadnic r a ϕ, které jsou definovány vztahy x = r cos ϕ a y = r sin ϕ.
 Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
2.2 Mezní stav pružnosti Mezní stav deformační stability Mezní stav porušení Prvek tělesa a napětí v řezu... p03 3.
 obsah 1 Obsah Zde je uveden přehled jednotlivých kapitol a podkapitol interaktivního učebního textu Pružnost a pevnost. Na tomto CD jsou kapitoly uloženy v samostatných souborech, jejichž název je v rámečku
obsah 1 Obsah Zde je uveden přehled jednotlivých kapitol a podkapitol interaktivního učebního textu Pružnost a pevnost. Na tomto CD jsou kapitoly uloženy v samostatných souborech, jejichž název je v rámečku
Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika)
") Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
Inovace studijního oboru Geotechnika Reg. č. CZ.1.07/2.2.00/28.0009 Metoda konečných prvků Charakteristika metody (výuková prezentace pro 1. ročník navazujícího studijního oboru Geotechnika) Doc. RNDr.
Autor: Vladimír Švehla
 Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
16. Matematický popis napjatosti
 p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
9.5. Soustavy diferenciálních rovnic
 Cíle Budeme se nyní zabývat úlohami, v nichž je cílem najít dvojici funkcí y(x), z(x), pro které jsou zadány dvě lineární rovnice prvního řádu, obsahující tyto funkce a jejich derivace. Výklad Omezíme-li
Cíle Budeme se nyní zabývat úlohami, v nichž je cílem najít dvojici funkcí y(x), z(x), pro které jsou zadány dvě lineární rovnice prvního řádu, obsahující tyto funkce a jejich derivace. Výklad Omezíme-li
1 Funkce dvou a tří proměnných
 1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
Cvičení 1. Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti
 Cvičení 1 Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti Napjatost v bodě tělesa Napjatost (napěťový stav) v bodě tělesa je množinou obecných napětí ve všech řezech, které lze
Cvičení 1 Napjatost v bodě tělesa Hlavní napětí Mezní podmínky ve víceosé napjatosti Napjatost v bodě tělesa Napjatost (napěťový stav) v bodě tělesa je množinou obecných napětí ve všech řezech, které lze
Kap. 3 Makromechanika kompozitních materiálů
 Kap. Makromechanika kompozitních materiálů Informační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky FS ČVU v Praze. listopadu 7 Základní pojmy a vztahy Notace
Kap. Makromechanika kompozitních materiálů Informační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky FS ČVU v Praze. listopadu 7 Základní pojmy a vztahy Notace
Plasty. Základy materiálového inženýrství. Katedra materiálu Strojní fakulty Technická univerzita v Liberci Doc. Ing. Karel Daďourek, 2010
 Plasty Základy materiálového inženýrství Katedra materiálu Strojní fakulty Technická univerzita v Liberci Doc. Ing. Karel Daďourek, 2010 Základní vlastnosti plastů Výroba z levných surovin. Jsou to sloučeniny
Plasty Základy materiálového inženýrství Katedra materiálu Strojní fakulty Technická univerzita v Liberci Doc. Ing. Karel Daďourek, 2010 Základní vlastnosti plastů Výroba z levných surovin. Jsou to sloučeniny
Kapitola 8: Dvojný integrál 1/26
 Kapitola 8: vojný integrál 1/26 vojný integrál - osnova kapitoly 2/26 dvojný integrál přes obdélník definice výpočet (Fubiniova věta pro obdélník) dvojný integrál přes standardní množinu definice výpočet
Kapitola 8: vojný integrál 1/26 vojný integrál - osnova kapitoly 2/26 dvojný integrál přes obdélník definice výpočet (Fubiniova věta pro obdélník) dvojný integrál přes standardní množinu definice výpočet
písemky (3 příklady) Výsledná známka je stanovena zkoušejícím na základě celkového počtu bodů ze semestru, ze vstupního testu a z písemky.
 Výsledná známka je stanovena zkoušejícím na základě celkového počtu bodů ze semestru, ze vstupního testu a z písemky.") POŽADAVKY KE ZKOUŠCE Z PP I Zkouška úrovně Alfa (pro zájemce o magisterské studium) Zkouška sestává ze vstupního testu (10 otázek, výběr správné odpovědi ze čtyř možností, rozsah dle sloupečku Požadavky)
POŽADAVKY KE ZKOUŠCE Z PP I Zkouška úrovně Alfa (pro zájemce o magisterské studium) Zkouška sestává ze vstupního testu (10 otázek, výběr správné odpovědi ze čtyř možností, rozsah dle sloupečku Požadavky)
Extrémy funkce dvou proměnných
 Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
PŘEDNÁŠKA 6 INTEGRACE POMOCÍ SUBSTITUCE
 PŘEDNÁŠKA 6 INTEGRACE POMOCÍ SUBSTITUCE Příklad Představme si, že máme vypočítat integrál I = f(, y) d dy, M kde M = {(, y) R 2 1 < 2 + y 2 < 4}. y M je mezikruží mezi kružnicemi o poloměru 1 a 2 a se
PŘEDNÁŠKA 6 INTEGRACE POMOCÍ SUBSTITUCE Příklad Představme si, že máme vypočítat integrál I = f(, y) d dy, M kde M = {(, y) R 2 1 < 2 + y 2 < 4}. y M je mezikruží mezi kružnicemi o poloměru 1 a 2 a se
Tvorba výpočtového modelu MKP
 Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
Tvorba výpočtového modelu MKP Jaroslav Beran (KTS) Modelování a simulace Tvorba výpočtového modelu s využitím MKP zahrnuje: Tvorbu (import) geometrického modelu Generování sítě konečných prvků Definování
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),
![Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),](/thumbs/62/47835194.jpg "Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),") Definice 5.2.1. Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo má v tomto bodě totální diferenciál, jestliže je možné její přírůstek z na nějakém okolí bodu A vyjádřit jako
Definice 5.2.1. Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo má v tomto bodě totální diferenciál, jestliže je možné její přírůstek z na nějakém okolí bodu A vyjádřit jako
Řešení: Nejprve musíme napsat parametrické rovnice křivky C. Asi nejjednodušší parametrizace je. t t dt = t 1. x = A + ( B A ) t, 0 t 1,
 t, 0 t 1,") Určete Křivkový integrál příklad 4 x ds, kde {x, y ; y ln x, x 3}. Řešení: Nejprve musíme napsat parametrické rovnice křivky. Asi nejjednodušší parametrizace je Tedy daný integrál je x ds x t, y ln t,
Určete Křivkový integrál příklad 4 x ds, kde {x, y ; y ln x, x 3}. Řešení: Nejprve musíme napsat parametrické rovnice křivky. Asi nejjednodušší parametrizace je Tedy daný integrál je x ds x t, y ln t,
Přednáška 08. Obecná trojosá napjatost
 Přednáška 8 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův zákon Objemový modul pružnosti Oedometrický modul pružnosti Hlavní napětí, hlavní deformace
Přednáška 8 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův zákon Objemový modul pružnosti Oedometrický modul pružnosti Hlavní napětí, hlavní deformace
Pružnost a pevnost. zimní semestr 2013/14
 Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
Pružnost a pevnost zimní semestr 2013/14 Organizace předmětu Přednášející: Prof. Milan Jirásek, B322 Konzultace: pondělí 10:00-10:45 nebo dle dohody E-mail: Milan.Jirasek@fsv.cvut.cz Webové stránky předmětu:
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků
 Přednáška 2 Princip metody konečných prvků") Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Přednáška 2 Princip metody konečných prvků Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2014 Obsah Variační principy
VI. Derivace složené funkce.
 VI. Derivace složené funkce. 17. Parciální derivace složené funkce Budeme uvažovat složenou funkci F = f(g, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce,
VI. Derivace složené funkce. 17. Parciální derivace složené funkce Budeme uvažovat složenou funkci F = f(g, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce,
MATEMATICKÉ PRINCIPY VÍCEROZMĚRNÉ ANALÝZY DAT
 8. licenční studium Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie MATEMATICKÉ PRINCIPY VÍCEROZMĚRNÉ ANALÝZY DAT Příklady: ) Najděte vlastní (charakteristická) čísla a vlastní
8. licenční studium Univerzita Pardubice Fakulta chemicko-technologická Katedra analytické chemie MATEMATICKÉ PRINCIPY VÍCEROZMĚRNÉ ANALÝZY DAT Příklady: ) Najděte vlastní (charakteristická) čísla a vlastní
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Vlastnosti a zkoušení materiálů. Přednáška č.4 Úvod do pružnosti a pevnosti
 Vlastnosti a zkoušení materiálů Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze
Vlastnosti a zkoušení materiálů Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
4 Viskoelasticita polymerů II - creep
 4 Viskoelasticita polymerů II - creep Teorie Ke zkoumání mechanických vlastností viskoelastických polymerních látek používáme dvě nestacionární metody: relaxační test (podrobně popsaný v úloze Viskoelasticita
4 Viskoelasticita polymerů II - creep Teorie Ke zkoumání mechanických vlastností viskoelastických polymerních látek používáme dvě nestacionární metody: relaxační test (podrobně popsaný v úloze Viskoelasticita
Zjednodušená deformační metoda (2):
:") Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
Geometricky válcová momentová skořepina
 Geometricky válcová momentová skořepina Dalším typem tenkostěnnéo rotačně souměrnéo tělesa je geometricky válcová momentová skořepina. Typický souřadnicový systém je opět systém s osami z, r, a t. Geometricky
Geometricky válcová momentová skořepina Dalším typem tenkostěnnéo rotačně souměrnéo tělesa je geometricky válcová momentová skořepina. Typický souřadnicový systém je opět systém s osami z, r, a t. Geometricky
Polymery: minimum, které bychom si měli pamatovat. Lukáš Horný
 Polymery: minimum, které bychom si měli pamatovat ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské přístroje Lukáš Horný Lukas.horny@fs.cvut.cz
Polymery: minimum, které bychom si měli pamatovat ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské přístroje Lukáš Horný Lukas.horny@fs.cvut.cz
KONSTITUČNÍ VZTAHY. 1. Tahová zkouška
 1. Tahová zkouška Tahová zkouška se provádí dle ČSN EN ISO 6892-1 (aktualizována v roce 2010) Je nejčastější mechanickou zkouškou kovových materiálů. Zkoušky se realizují na trhacích strojích, kde se zkušební
1. Tahová zkouška Tahová zkouška se provádí dle ČSN EN ISO 6892-1 (aktualizována v roce 2010) Je nejčastější mechanickou zkouškou kovových materiálů. Zkoušky se realizují na trhacích strojích, kde se zkušební
pouze u některých typů rovnic a v tomto textu se jím nebudeme až na
 Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
EXPERIMENTÁLNÍ MECHANIKA 2
 EXPERIMENTÁLNÍ MECHANIKA 2 2. přednáška Jan Krystek 28. února 2018 EXPERIMENTÁLNÍ MECHANIKA Experiment slouží k tomu, abychom pomocí experimentální metody vyšetřili systém veličin nutných k řešení problému.
EXPERIMENTÁLNÍ MECHANIKA 2 2. přednáška Jan Krystek 28. února 2018 EXPERIMENTÁLNÍ MECHANIKA Experiment slouží k tomu, abychom pomocí experimentální metody vyšetřili systém veličin nutných k řešení problému.
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Aproximace posuvů [ N ],[G] Pro každý prvek se musí nalézt vztahy
![Aproximace posuvů [ N ],[G] Pro každý prvek se musí nalézt vztahy](/thumbs/97/130835283.jpg "Aproximace posuvů [ N ],[G] Pro každý prvek se musí nalézt vztahy") Aproimace posuvů Pro každý prvek se musí nalézt vztahy kde jsou prozatím neznámé transformační matice. Neznámé funkce posuvů se obvykle aproimují ve formě mnohočlenů kartézských souřadnic. Například 1.
Aproimace posuvů Pro každý prvek se musí nalézt vztahy kde jsou prozatím neznámé transformační matice. Neznámé funkce posuvů se obvykle aproimují ve formě mnohočlenů kartézských souřadnic. Například 1.
4 Příklady Fraunhoferových difrakčních jevů
 47 4 Příklady Fraunhoferových difrakčních jevů 4.1 Fraunhoferova difrakce na obdélníkovém otvoru 4.2 Fraunhoferova difrakce na stěrbině 4.3 Fraunhoferova difrakce na kruhovém otvoru 4.4 Fraunhoferova difrakce
47 4 Příklady Fraunhoferových difrakčních jevů 4.1 Fraunhoferova difrakce na obdélníkovém otvoru 4.2 Fraunhoferova difrakce na stěrbině 4.3 Fraunhoferova difrakce na kruhovém otvoru 4.4 Fraunhoferova difrakce
Struktura polymerů. Příprava (výroba).struktura vlastnosti. Materiálové inženýrství (Nauka o materiálu) Základní představy: přírodní vs.
.struktura vlastnosti. Materiálové inženýrství (Nauka o materiálu) Základní představy: přírodní vs.") Struktura polymerů Základní představy: přírodní vs. syntetické V.Švorčík, vaclav.svorcik@vscht.cz celulóza přírodní kaučuk Příprava (výroba).struktura vlastnosti Materiálové inženýrství (Nauka o materiálu)
Struktura polymerů Základní představy: přírodní vs. syntetické V.Švorčík, vaclav.svorcik@vscht.cz celulóza přírodní kaučuk Příprava (výroba).struktura vlastnosti Materiálové inženýrství (Nauka o materiálu)
Nauka o materiálu. Přednáška č.4 Úvod do pružnosti a pevnosti
 Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Kapitola 11: Lineární diferenciální rovnice 1/15
 Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Diferenciální počet funkcí více proměnných
 Vysoké učení technické v Brně Fakulta strojního inženýrství Diferenciální počet funkcí více proměnných Doc RNDr Miroslav Doupovec, CSc Neřešené příklady Matematika II OBSAH Obsah I Diferenciální počet
Vysoké učení technické v Brně Fakulta strojního inženýrství Diferenciální počet funkcí více proměnných Doc RNDr Miroslav Doupovec, CSc Neřešené příklady Matematika II OBSAH Obsah I Diferenciální počet
Ztráta stability tenkých přímých prutů - vzpěr
 Ztráta stability tenkých přímých prutů - vzpěr Motivace štíhlé pruty namáhané tlakem mohou vybočit ze svého původně přímého tvaru a může dojít ke ztrátě stability a zhroucení konstrukce dříve, než je dosaženo
Ztráta stability tenkých přímých prutů - vzpěr Motivace štíhlé pruty namáhané tlakem mohou vybočit ze svého původně přímého tvaru a může dojít ke ztrátě stability a zhroucení konstrukce dříve, než je dosaženo
Diferenˇcní rovnice Diferenciální rovnice Matematika IV Matematika IV Program
 Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
0 = 2e 1 (z 3 1)dz + 3z. z=0 z 3 4z 2 + 3z + rez. 4. Napište Fourierův rozvoj vzhledem k trigonometrickému systému periodickému
dz + 3z. z=0 z 3 4z 2 + 3z + rez. 4. Napište Fourierův rozvoj vzhledem k trigonometrickému systému periodickému") 2 1 1 0.8 0.6 0.4 0.2 0.2 0.4 0.6 0.8 1 x 1 2 Jméno a příjmení: ID.č. 9.5.2016 1. Řešte diferenciální rovnici: y + 2xy x 2 + 3 = sin x x 2 + 3. y = C cos x x 2 + 1 2. Vypočtěte z 2 e z dz, kde je křivka
2 1 1 0.8 0.6 0.4 0.2 0.2 0.4 0.6 0.8 1 x 1 2 Jméno a příjmení: ID.č. 9.5.2016 1. Řešte diferenciální rovnici: y + 2xy x 2 + 3 = sin x x 2 + 3. y = C cos x x 2 + 1 2. Vypočtěte z 2 e z dz, kde je křivka
Vzpěr jednoduchého rámu, diferenciální operátory. Lenka Dohnalová
 1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
Substituce ve vícenásobném integrálu verze 1.1
 Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Obsah Obyčejné diferenciální rovnice
 Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Reologické modely technických materiálů při prostém tahu a tlaku
 . lekce Reologické modely technických materiálů při prostém tahu a tlaku Obsah. Základní pojmy Vnitřní síly napětí. Základní reologické modely technických materiálů 3.3 Elementární reologické modely creepu
. lekce Reologické modely technických materiálů při prostém tahu a tlaku Obsah. Základní pojmy Vnitřní síly napětí. Základní reologické modely technických materiálů 3.3 Elementární reologické modely creepu
EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH
 EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH ÚLOHY ŘEŠITELNÉ BEZ VĚTY O MULTIPLIKÁTORECH Nalezněte absolutní extrémy funkce f na množině M. 1. f(x y) = x + y; M = {x y R 2 ; x 2 + y 2 1} 2. f(x y) = e x ; M = {x y R
EXTRÉMY FUNKCÍ VÍCE PROMĚNNÝCH ÚLOHY ŘEŠITELNÉ BEZ VĚTY O MULTIPLIKÁTORECH Nalezněte absolutní extrémy funkce f na množině M. 1. f(x y) = x + y; M = {x y R 2 ; x 2 + y 2 1} 2. f(x y) = e x ; M = {x y R
POLYMERY PRINCIPY, STRUKTURA, VLASTNOSTI. Doc. ing. Jaromír LEDERER, CSc.
 POLYMERY PRINCIPY, STRUKTURA, VLASTNOSTI Doc. ing. Jaromír LEDERER, CSc. O čem budeme mluvit Úvod do chemie a technologie polymerů Makromolekulární řetězce Struktura, fázový stav a základní vlastnosti
POLYMERY PRINCIPY, STRUKTURA, VLASTNOSTI Doc. ing. Jaromír LEDERER, CSc. O čem budeme mluvit Úvod do chemie a technologie polymerů Makromolekulární řetězce Struktura, fázový stav a základní vlastnosti
Nalezněte hladiny následujících funkcí. Pro které hodnoty C R jsou hladiny neprázdné
 . Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
. Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
Požadavky ke zkoušce
 Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
Základy matematické teorie pružnosti Tenzor napětí a tenzor deformace Statické (Cauchyho) rovnice. Geometrické rovnice
 rovnice. Geometrické rovnice") Přednáška 1 Základy matematické teorie pružnosti Tenzor napětí a tenzor deformace Statické (Cauchyho) rovnice Rozšířený Hookův zákon Geometrické rovnice Ondřej Jiroušek Ústav mechaniky a materiálů Fakulta
Přednáška 1 Základy matematické teorie pružnosti Tenzor napětí a tenzor deformace Statické (Cauchyho) rovnice Rozšířený Hookův zákon Geometrické rovnice Ondřej Jiroušek Ústav mechaniky a materiálů Fakulta
MAKROMOLEKULÁRNÍ LÁTKY
 MAKROMOLEKULÁRNÍ LÁTKY 1. Základní pojmy - makromolekulární látky = molekulové systémy složené z velkého počtu atomů, které jsou vázány chemickou vazbou do dlouhých řetězců - řetězce jsou tvořeny stavebními
MAKROMOLEKULÁRNÍ LÁTKY 1. Základní pojmy - makromolekulární látky = molekulové systémy složené z velkého počtu atomů, které jsou vázány chemickou vazbou do dlouhých řetězců - řetězce jsou tvořeny stavebními
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Plasty Plasty, známé také pod názvem plastické hmoty nebo pod ne zcela přesným (obecnějším) názvem umělé hmoty,
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 Plasty Plasty, známé také pod názvem plastické hmoty nebo pod ne zcela přesným (obecnějším) názvem umělé hmoty,
5.3. Implicitní funkce a její derivace
 Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Nelineární optimalizace a numerické metody (MI NON)
") Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
rovnic), Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =
, Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =") Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
CAD/CAE. Fyzikální model. (fyzikální podstata problémů, počáteční a okrajové podmínky, materiálové modely)
") CAD/CAE ÚNOD: Jan Tippner, Václav Sebera, Miroslav Trcala, Eva Troppová. Fyzikální model (fyzikální podstata problémů, počáteční a okrajové podmínky, materiálové modely) Podpořeno projektem Průřezová inovace
CAD/CAE ÚNOD: Jan Tippner, Václav Sebera, Miroslav Trcala, Eva Troppová. Fyzikální model (fyzikální podstata problémů, počáteční a okrajové podmínky, materiálové modely) Podpořeno projektem Průřezová inovace
8.1. Separovatelné rovnice
 8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
3.2 Základy pevnosti materiálu. Ing. Pavel Bělov
 3.2 Základy pevnosti materiálu Ing. Pavel Bělov 23.5.2018 Normálové napětí představuje vazbu, která brání částicím tělesa k sobě přiblížit nebo se od sebe oddálit je kolmé na rovinu řezu v případě že je
3.2 Základy pevnosti materiálu Ing. Pavel Bělov 23.5.2018 Normálové napětí představuje vazbu, která brání částicím tělesa k sobě přiblížit nebo se od sebe oddálit je kolmé na rovinu řezu v případě že je
EXPERIMENTÁLNÍ MECHANIKA 2. Jan Krystek
 EXPERIMENTÁLNÍ MECHANIKA 2 4. přednáška Jan Krystek 15. března 2018 ODPOROVÁ TENZOMETRIE Elektrická odporová tenzometrie je nepřímá metoda. Poměrné prodloužení je určováno na základě poměrné změny elektrického
EXPERIMENTÁLNÍ MECHANIKA 2 4. přednáška Jan Krystek 15. března 2018 ODPOROVÁ TENZOMETRIE Elektrická odporová tenzometrie je nepřímá metoda. Poměrné prodloužení je určováno na základě poměrné změny elektrického