Přednáška 8: Tryskový prohoz. 1. Hydraulický 2. Pneumatický
|
|
|
- Dominik Fišer
- před 9 lety
- Počet zobrazení:
Transkript
1 Přednáška 8: Tryskový prohoz 1. Hydraulický 2. Pneumatický 1

2 2 97
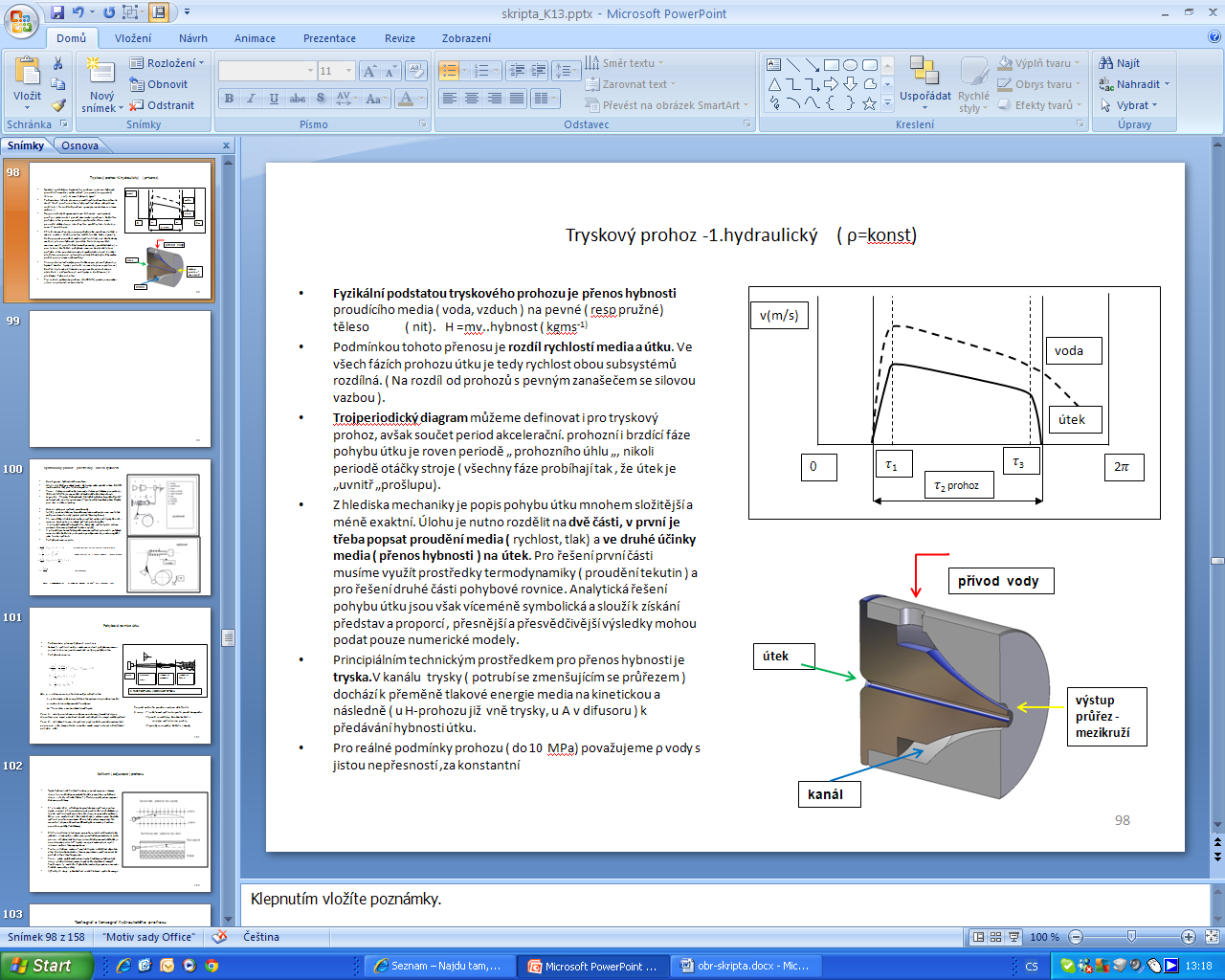
3 Hydraulický prohoz- prostředky, určení rychlosti Konfigurace hydraulického prohozu: Útek z předlohy na odměřovač, do trysky, voda z potrubí o tlaku 0,X MPa (vodovodní řád) přes filtr do čerpadla. Pozn.: tlakový rozvod vody ( rozuměj s tlakem potřebným pro prohoz tj. řádově 10 MPa ) se nepoužívá z důvodů nákladů a bezpečnosti. Legenda : 1-tryska, 2-odměřovač, 3-předloha,4-válec čerpadla.5-píst,6automatické ventily s pružinami, 7- pružina, 8-převodová páka, 9-vačka pro sání a stlačení pružiny Určení výstupní rychlosti proudu vody : t=t(0), pružina stlačena, čerpadlo naplněno vodou přes sací ventil, tlak vody cca atmosferický (+plnící přetlak -desetiny barru) Při zanedbání stlačitelnosti vody se rychlost vody v ústí trysky dá určit z rovnice kontinuity a ze známé rychlosti pístu čerpadla. V případě vačkového čerpadla- viz dolní obr. rychlost pístu určíme pomocí derivace převodové funkce x =μ ( φ ). V případě pružinového čerpadla musíme rychlost pístu určit z pohybové rovnice,kde budící síla je síla pružiny a odporové síly je nutno vyjádřit jako funkci rychlosti. Pohybová rovnice pístu : m d 2x C ( x0 x) + ps + T = 0 dt 2 p= m F S F= µ n C-tuhost pružiny, T-třecí, p-tlak, S-průřez pístu ki x i odpor. hydraul. síla = součet odporů ( změny ø,ohyb) 1 d 2x dx C ( x0 x) + K ( ) µ T = 0 dt 2 dt vtr = S píst Str x rov. kontinuity Pozn.: v nejjednodušším případě lze dosadit za p=c2 /2 ( Bernouli rov) 3 98
 Při zanedbání stlačitelnosti vody se rychlost vody v ústí trysky dá určit z rovnice kontinuity a ze známé rychlosti")
4 Pohybová rovnice útku Podmínkou přenosu hybnosti :vvody>vútku Známe-li rychlost vody, můžeme sestavit pohybovou rovnici, jejímž řešením jsou kinematické veličiny pohybu útku : Pohybová rovnice: dx 2 1 dm 2 m 2 + x FTAH + FODPOR = 0 dt 2 dx 1 FT = ρ v c x L(vv vú ) F0 = ρ Ac x L0 vu2 ke fα 2 kde:ρ s indexem v,a ú je hustota vody, vzduch, útku L s příslušným indexem je délka útku vystavená působení media cx součinitel aerodynamického odporu kefα tření útku v úseku odměřovač-tryska Pozn 1.: vztahy pro tahovou a odporovou sílu mají formálně stejný charakter, pro smysl působení síly má rozhodující vliv smysl rozdílu rychlostí Pozn 2.: vzhledem k tomu, že rychlost profil vodního proudu umíme řešit pouze pro I fázi kompaktniho proudu, nemá smysl usilovat o další řešení pohybu útku TRYSKA RYCHLOSTNÍ PROFIL JEDNOTLIVÉ PROUDNICE JEDNOTLIVÉ ČÁSTICE 3 FÁZE ROZPADU VODNÍHO PAPRSKU Rozpad vodního proudu s rostoucí odlehlostí L 3 zony I- lze definovat rychlostní profil, proud kompaktní II- proud se rozděluje do několika částí s různými rychlostními profily III- proudy se rozpadají do částic ( kapky) 4

5 Seřízení ( adjustace ) prohozu Tryska hydraulického tkacího stroje je pevně spojena s rámem stroje-na rozdíl od pneumatického, kde je umístěna na bidlenu stroje ( efekt zahradní hadice ).Přesto je její adjustace spojena s dvěma problémy: 1- elevační úhel : vzhledem ke gravitačnímu zrychlení je nutno trysku nastavit k horizontální rovině o určitý úhel α.jeho hodnota je funkcí rychlosti prohozu útku a šíře stroje (resp periody prohozu ). Dá se sice exaktně určit ( balistická křivka ), ovšem v praxi dopředu rychlost prohozu neznáme. Úhel se tedy určuje empiricky(.pro srovnání při periodě prohozu 50ms dojde ve směru y k poklesu proudu o y=1/2gt2 =12,5mm) 2-úhel nastřelení :útek nesmí po prohozu zůstat indiferentní t,j, bez jakékoli silové vazby s některým z prostředků pro kontrolu sil a jeho pozice. U hydraulického stroje ( na rozdíl od pneumatického kde je nainstalována stretch tryska), není jiná možnost než zajistit silovou vazbu s tkacím paprskem. Proto je třeba ve směru z pootočit trysku o úhel β tak, aby se čelo útku dostalo do kontaktu s tkacím paprskem a synchronisovat tak pohyb útku a tkacího paprsku. Pozn.: právě problém adjustace trysky handikapuje hydraulické stroje před ostatními ( samozřejmě vedle všeobecně známých handicapů tj. : malá šíře, hydrofobní materiály zejména v osnově, hladké monofily v útku) Výhody W stroje : jednoduchost, nízká hlučnost, spotřeba energie α β 5

6 Tachograf a tenzograf hydraulického prohozu Tachograf W stroje Tenzograf W rychlost( m/s) síla ( % ) úhel potočení ( grad) úhel potočení ( grad) 6
 0 30 60 90 120 150 180 210 240 270 300 330 360 úhel")
7 Reálný tenzograf hydraulického stroje 7

8 Přednáška 12 : Modelování přírazného procesu Peirceův a Olofssonův model vazného bodu Analytické řešení přírazu Diskretní statické modely přírazného procesu a simulace parametrů Dynamický model přírazu 142

9 Přírazný proces Kinematické buzení (pohyb pracovních členů mechanismů stroje) osových elastických sil v nitích vyvolává změny rovnováhy vnitřních (elastických) a vnějších (adhesní, reakce) sil v soustavě mnoha těles,obsahující i elementy nití, které na ně reagují odpovídajícími změnami polohy tuhých a deformacemi pružných těles ( formování tkaniny). Mechanická práce těchto sil se transformuje na deformační energii tkaniny,ze které resultují její mechanické vlastnosti. Přírazný proces lze studovat prostředky statiky ( bez uvažování hmot elementů nití) a dynamiky. Dynamické modely podávají informaci nejen o velikosti parametrů ale i o jejich změnách v čase. Někdy se uvádí i t.zv. qazidynamické řešení, které neuvažuje hmoty a setrvačné síly ale respektuje rychlostní závislosti vybraných sil. Modely pro statické řešení mohou být analytické a numerické ( diskretní). Analytická řešení však vyžadují razantní zjednodušení nejen v konstrukci náhradních schemat úlohy a modelování parametrů nití ale i v samotných výpočetních postupech (na př linearizace funkcí). Diskretní modely a numerické výpočetní postupy mohou zachytit i nelinearity okrajových podmínek, nahradit spekulativní předpoklady a objektivizovat výsledky. Diskretní dynamické modely mohou jako dosud jediné posoudit tzv rázové a lisovací účinky přírazného procesu. Základním prostředkem pro konstrukci všech modelů přírazu je Peirceův model vazného bodu.tento model vytváří jednoduché vztahy mezi silami ( statická rovnováha). Použití modelů vazného bodu s uvažováním ohybové tuhosti a s větším počtem vnitřních statických účinků je pro analytická řešení za mezí únosnosti a pro diskretní modely obtížné. 143
 a dynamiky. Dynamické modely podávají informaci nejen o velikosti parametrů ale i o jejich změnách v čase.")
10 Analytické řešení ( viz Nosek.S: Teorie jedno a víceprošlupní tvorby tkaniny, VUB Ústí n /O, 1988) matematický model: y(t) = x(t) + ξ(t)../1/ F(t) = (C1 + C2) x(t). /2/ R(t) = α*ξ(t)+β*f./3/ F(t) = R(t)./4/ y(t)=y*sinωpt /5/ ( f(t)=f0+φξ ) pro qazidynamické řešení y je amplituda pohybu přírazného mechanismu ve fázi kontaktu s tkaninou x je prodloužení osnovních nití ζ je skluz - stlačování útku po osnovních nití Druhá rovnice vyjadřuje příraznou sílu FP jako funkci konstant. pružin C1 osnovy a C2 tkaniny a prodloužení osnovy. Třetí rovnice vyjadřuje tkací odpor R jako funkci geometrických (α ζ ) a třecích (β f ) vlastností textilních materiálů- matematický model linearizace R=R(A,f), v okolí pracovního bodu lze linearizovat: R=δR(A,f)ξ/δA + δr(a.f) f/δf = αξ+βf A=Au-ξ Čtvrtá rovnice popisuje závislost koeficientu tření na rychlosti pohybu pro tzv. dyn. řešení Qazidynamické řešení této soustavy rovnic rezultuje ve vztah: ξ(t) =1/K F(t)dt ; impuls příraz. síly. Skluz útku je funkcí impulsu přírazné síly. Qazistatické řešení: model je lineární- dílo ne ( 2 o volnosti, buď skluz nebo protažení) Qazidynamické : neuvažuje hmoty, nekorektní 145

11 Náhradní schema zjednodušeného linearizovaného přírazného procesu Statika- rovnováha sil:( element osnovy) y : mg = N x : S1 S2 mgf = 0 (C1+C2)x-mgf =0 x=mgf/c1+c2 Změní- li se poměr adhezní a elastické síly, dojde ke skluzu. Grafické znázornění posuvů, sil a jejich práce je uvedeno na obr.5,19. Práce elastických sil: Ae= Fedx Práce adhezních sil: A a= Fadξ V časovém okamžiku t(0) = 0 naruší rovnováhu elementu osnovy každá nenulová síla, (mgf 0) a pokud bude platit nerovnost mgf > (C1 + C2) x, bude se element osnovy pohybovat spolu s elementem útku, přičemž bude narůstat elastická síla (C1 + C2) x. 146
 x, bude se element osnovy pohybovat spolu s elementem útku, přičemž bude narůstat elastická síla (C1 + C2)")
12 Analytické dynamické řešení úlohy dle náhradního schematu Pohybové rovnice : m0x -(C1+C2)*x=F Průběh F nespojitý: F=mgf=T pro y x F=(C1+C2)x pro y =x Poč.podmínky: T=0; y(t)=0; x=o; x =0 signt=signξ x =f(y) pro y (0) 0 147
=0; x=o; x =0 signt=signξ x =f(y)")
13 Rovnováha sil ve vazném bodě v průběhu formování tkaniny ( přírazný puls) I / Elementy sousedních nití osnovy, útku a lamel tkacího paprsku mají silovou vazbu, paprsek spolu s útkem mají předepsaný pohyb ( kinematické buzení) viz dílo x(t),x (t) II / Z tkaniny vyřízneme element útku odpovídající rozteči osnovních nití a element jedné osnovní nitě. Sousední osnovní nitě nahradíme podložkou, která simuluje účinek osnovních nití udržující útek ve tkací rovině viz náhradní schema III / Odstraníme vazby mezi tělesy a nahradíme je silami. S-elastické síly v osnovních nitích, N- reakce, F- přírazná síla, T třecí ( viz model) IV/ Rovnice statické rovnováhy pro element osnovy i) S1 cos 1 - S2 cos 2 +T = 0 a) -S1 sin 1 - S2 sin 2 +N =0 Výslednice elastických sil v případě 1 < 2 svou horizontální složkou vytlačuje útek směrem proti paprsku geometrická složka tkacího odporu. K té se připojuje v případě nenulové rychlosti i třecí síla T=Nf, úměrná vertikální složce výslednice elastických sil. Tkací odpor R je v rovnováze s příraz.silou FP = ( C1 +C2 )x V/ soustava má 20 volnosti, buď se pohybují oba elementy společně a dochází k navýšení sil ( y=x), nebo dojde k relativnímu pohybu útku po stojící osnově skluz. Ten podmiňuje dosažení dostavy. O variantě pohybu rozhoduje poměr i elastických( budících) a odporových (adhezních) sil. Je-li i >1, y=ξ, je-li i <1 y=x. (S1 cos 1 - S2 cos 2 ) / (S1sin 1 - S2 sin 2 )f = i I / dílo 1 2 S1 S2 2 1 III/ model S1 T S2 II/ náhradní schema N Rozbor sil působících na element osnovy v procesu přírazu 148
 IV/ Rovnice statické rovnováhy pro element osnovy i) S1 cos 1 - S2 cos 2 +T = 0 a) -S1 sin 1 - S2 sin 2 +N =0")
14 Statický diskretní model přírazného procesu- Náhradní schema: vazný element ve zrodu+1 vazný element vytvořený +pružiny, soustava má 2 stupně volnosti a je buzena pohybem paprsku y=y(t). Pohyb elementu útku je daný zdvihovou funkcí paprsku, pohyb elementu osnovy řešíme rovnicemi statické rovnováhy. Rovnice vazby : A(t)=A(0)-ξ. I ) Poč podmínky 1 kroku :-soustava elementů je v rovnováze vnější síly elastické F1=F2=Q vnitřní elastické S1cosφ1-S2cosφ2=0 = FE adhesní síly : Nf=(S1sinφ1+S2sinφ2)f = FA bilance FE/FA=0/FA <1, y=x, Fp=C-x, φ=φ v rámci kroku dojde k protažení osnovy, bez formování tkaniny( Ao), k dosažení nové rovnováhy nutno superponovat sílu Fp II ) poč podmínky 2 kroku: vnější síly: Q1=Q+C1x, Q2=Q-C2x superponovaná síla : Fp= ( C1+C2)x FE=Fp, FAII=FAI, FE/FA>1, v rámci kroku dojde ke skluzu y=ξ, Fp=konst, φ2 roste, tkanina se formuje A1 = Ao-ξ S1cosφ1-S2cosφ2 (S1sinφ1+S2sinφ2) f 1 159
, k dosažení nové rovnováhy nutno superponovat sílu Fp II ) poč podmínky 2 kroku: vnější síly: Q1=Q+C1x, Q2=Q-C2x")
15 Algoritmus výpočtu x a ξ s použitím rovnic statické rovnováhy 1/ y = y/n i krok 3/ tgϕ 2,i = 4/ Q1,i = Q + ( C1 ) xi 5/ F = R = S1 cos ϕ 1 S 2,i cos ϕ 6/ z = 7/ Je li z > 1 0 xi = 2/ 8/ y i yi = ξi = x 1 hi a0 + ξ i i ξ součty realisovaných kroků 1 výpočet geometrie i-tého kroku ; Q2,i = Q2,i ( C2 ) xi 2,i elastická síla S1 cos ϕ 1 S 2,i cos ϕ 2,i F = T ( S1 sin ϕ 1 + S 2,i sin ϕ 2,i ) f dochází ke skluzu je-li z 1 dochází k protažení S = Q/cosφ T = N f = ( S1 sin ϕ 1 + S 2,i sin ϕ 2,i ) f poměr elast. a adhez síly y i = xi yi = ξ i ξi = 0 xi = 0 dosadit do dalšího kroku 150 adhezní síla
 f poměr elast.")
16 Diskretní model přírazu s elastickými a adhesními silami x[m] 0,0025 0,002 0,0015 0,001 0, , x[m] 0,002 0,004 0,006 0,008 0,01 0,012-0,001-0,0015-0,002-0,0025-0,003 x=x(t) y[m] y-x ( m ) sk luz 0,006 0,0035 0,005 0,003 0,0025 0,004 0,002 0,003 y[m] y-x ( m) 0,0015 0,001 0, ,002 0,004 0,006 0,008 0,01 0,012 skluz (m) 0,0005 0, ,002 0,004 0,006 0,008 t ( s) -0,001 y=y(t) ξ=ξ(t) 151 0,01 0,012
![0,006 0,0035 0,005 0,003 0,0025 0,004 0,002 0,003 y[m] y-x ( m) 0,0015 0,001 0,002 0 0 0,002 0,004 0,006](/docs-images/45/9451369/images/page_16.jpg "0,008 0,01 0,012 skluz (m) 0,0005 0,001 0 0 0,002 0,004 0,006 0,008 t ( s) -0,001 y=y(t) ξ=ξ(t) 151 0,01")

17 17 152

18 Dynamický model 153

19 algoritmus výpočtu-pohybové rovnice Pohybové rovnice lze odvodit ve tvaru : mo1v o1=t1+p2cosα2-p1cosα1 1 element osnova mú1y = -T1+F 1, element útek moiv oi=ti+pi+1cosαi+1-picosαi i-tý element osnova múix úi=-ti i-tý element útek Sílu Ti lze určit následujícím způsobem: Určí se síly Ti,fix (tečná síla mezi hmotami mo.i, a mú.i za předpokladu, že nedochází k prokluzu). Z podmínky shody zrychlení obou elementů vyplývá: a o=a ú =T+P i+1cosα1-pi+1cosαi+1 / mo = -T/ mú Ti.fix= -m ui ( Pi+1cosαi+1-P icosαi)/(moi+múi) Pro dosazení rozhoduje nerovnost Ti,fix < Ti,max, platí-li, dosadí se v daném kroku za Ti = Ti,fix, v opačném případě Ti,max Síla F je : F = m ú1 y + T1 Uvedenou soustavu lze řešit numericky a Ti.max (tečná síla za předpokladu, že dochází k prokluzu), adhezní síla (N f) Ti.max=f(Pisinαi +Pi+1sinαi+1)*sign(x ui voi) 154
/(moi+múi) Pro dosazení rozhoduje nerovnost Ti,fix < Ti,max, platí-li, dosadí se v daném kroku za Ti = Ti,fix, v opačném případě Ti,max Síla F je : F = m ú1 y + T1")
20 Výsledky řešení dynamického modelu 155

Teorie tkaní. Prohozní systémy. tryskové. M. Bílek, J. Dvořák
 Teorie tkaní Prohozní systémy tryskové M. Bílek, J. Dvořák 2016 Hydraulický prohoz Hydraulický tryskový prohoz přinesl výraznou změnu poměru hmotností zanašeče a útku (o 2 řády oproti mechanickým systémům).
Teorie tkaní Prohozní systémy tryskové M. Bílek, J. Dvořák 2016 Hydraulický prohoz Hydraulický tryskový prohoz přinesl výraznou změnu poměru hmotností zanašeče a útku (o 2 řády oproti mechanickým systémům).
Teorie tkaní. Modely vazného bodu. M. Bílek
 Teorie tkaní Modely vazného bodu M. Bílek 2016 Základní strukturální jednotkou tkaniny je vazný bod, tj. oblast v okolí jednoho zakřížení osnovní a útkové nitě. Proces tkaní tedy spočívá v tvorbě vazných
Teorie tkaní Modely vazného bodu M. Bílek 2016 Základní strukturální jednotkou tkaniny je vazný bod, tj. oblast v okolí jednoho zakřížení osnovní a útkové nitě. Proces tkaní tedy spočívá v tvorbě vazných
Teorie tkaní. Příraz útku. M. Bílek
 Teorie tkaní Příraz útku M. Bílek 2016 Celkové uspořádání bezčlunkového tkacího stroje Po ukončení fáze zanášení útku je útková nit uložena v určité vzdálenosti od čela tkaniny (posledního zatkaného útku).
Teorie tkaní Příraz útku M. Bílek 2016 Celkové uspořádání bezčlunkového tkacího stroje Po ukončení fáze zanášení útku je útková nit uložena v určité vzdálenosti od čela tkaniny (posledního zatkaného útku).
Měření prohozní rychlosti a sil v útku
 Teorie tkaní Měření prohozní rychlosti a sil v útku J. Dvořák Měření prohozní rychlosti a sil v útku tachografy a tenzografy Předmět a cíl semináře : A/ Měření rychlosti útku A 1/ Určení střední prohozní
Teorie tkaní Měření prohozní rychlosti a sil v útku J. Dvořák Měření prohozní rychlosti a sil v útku tachografy a tenzografy Předmět a cíl semináře : A/ Měření rychlosti útku A 1/ Určení střední prohozní
Obr. 9.1 Kontakt pohyblivé části s povrchem. Tomuto meznímu stavu za klidu odpovídá maximální síla, která se nezývá adhezní síla,. , = (9.
 9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
Měření sil v osnovních nitích
 Teorie tkaní Měření sil v osnovních nitích J. Dvořák Měření sil v osnovních nitích Cíl semináře : změřit a vyhodnotit průběh sil v osnovních nitích v intervalu tkacího cyklu Obsah: 1/ definice pojmů -elastické
Teorie tkaní Měření sil v osnovních nitích J. Dvořák Měření sil v osnovních nitích Cíl semináře : změřit a vyhodnotit průběh sil v osnovních nitích v intervalu tkacího cyklu Obsah: 1/ definice pojmů -elastické
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Nelineární úlohy při výpočtu konstrukcí s využitím MKP
 Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Teorie tkaní. Prohozní systémy. s pevným zanašečem. M. Bílek, J. Dvořák
 Teorie tkaní Prohozní systémy s pevným zanašečem M. Bílek, J. Dvořák 2016 Prohozní systémy Prohozní systémy Prohozní systémy Prohozní systémy Předmětem analýzy prohozních systémů jsou kinematické parametry
Teorie tkaní Prohozní systémy s pevným zanašečem M. Bílek, J. Dvořák 2016 Prohozní systémy Prohozní systémy Prohozní systémy Prohozní systémy Předmětem analýzy prohozních systémů jsou kinematické parametry
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Příklad 5.3. v 1. u 1 u 2. v 2
 Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Prošlupní mechanismus
 Teorie tkaní Prošlupní mechanismus M. Bílek 2016 Prošlupní mechanismus Prošlup je klínovitý prostor pro zanesení útku. Tento prostor je vymezen paprskem a osnovními nitěmi v horní a spodní větvi prošlupu.
Teorie tkaní Prošlupní mechanismus M. Bílek 2016 Prošlupní mechanismus Prošlup je klínovitý prostor pro zanesení útku. Tento prostor je vymezen paprskem a osnovními nitěmi v horní a spodní větvi prošlupu.
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Betonové konstrukce (S) Přednáška 3
 Přednáška 3") Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Kompenzace osnovních sil svůrkou
 Teorie tkaní Kompenzace osnovních sil svůrkou M. Bílek 2016 Osnovní svůrka Osnovní svůrka plní obecně na tkacím stroji tyto funkce: vedení osnovy do tkací roviny, snímání tahové síly v osnově, kompenzace
Teorie tkaní Kompenzace osnovních sil svůrkou M. Bílek 2016 Osnovní svůrka Osnovní svůrka plní obecně na tkacím stroji tyto funkce: vedení osnovy do tkací roviny, snímání tahové síly v osnově, kompenzace
Statika soustavy těles.
 Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Statika soustavy těles Základy mechaniky, 6 přednáška Obsah přednášky : uvolňování soustavy těles, sestavování rovnic rovnováhy a řešení reakcí, statická určitost, neurčitost a pohyblivost, prut a jeho
Mechanika s Inventorem
 Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Mechanika s Inventorem 2. Základní pojmy CAD data FEM výpočty Petr SCHILLING, autor přednášky Ing. Kateřina VLČKOVÁ, obsahová korekce Optimalizace Tomáš MATOVIČ, publikace 1 Obsah přednášky: Lagrangeův
Cvičení 7 (Matematická teorie pružnosti)
") VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Dynamika vázaných soustav těles
 Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Dynamika vázaných soustav těles Většina strojů a strojních zařízení, s nimiž se setkáváme v praxi, lze považovat za soustavy těles. Složitost dané soustavy závisí na druhu řešeného případu. Základem pro
Mechanika kontinua. Mechanika elastických těles Mechanika kapalin
 Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
b) Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm
 Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm") b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Prostředky vnější regulace tkacího procesu
 Teorie tkaní Prostředky vnější regulace tkacího procesu M. Bílek 2016 Autoregulační procesy však nejsou schopny vyřešit nestejnoměrnosti rezultující ze systematických variabilit a neshod procesu tkaní.
Teorie tkaní Prostředky vnější regulace tkacího procesu M. Bílek 2016 Autoregulační procesy však nejsou schopny vyřešit nestejnoměrnosti rezultující ze systematických variabilit a neshod procesu tkaní.
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
7 Lineární elasticita
 7 Lineární elasticita Elasticita je schopnost materiálu pružně se deformovat. Deformace ideálně elastických látek je okamžitá (časově nezávislá) a dokonale vratná. Působí-li na infinitezimální objemový
7 Lineární elasticita Elasticita je schopnost materiálu pružně se deformovat. Deformace ideálně elastických látek je okamžitá (časově nezávislá) a dokonale vratná. Působí-li na infinitezimální objemový
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Dynamika. Dynamis = řecké slovo síla
 Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport.
 Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Tuhost mechanických částí. Předepnuté a nepředepnuté spojení. Celková tuhosti kinematické vazby motor-šroub-suport. R. Mendřický, M. Lachman Elektrické pohony a servomechanismy 31.10.2014 Obsah prezentace
Řešení úloh 1. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů. = 30 s.
 Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Základní parametry a vlastnosti profilu vačky
 A zdvih ventilu B časování při 1mm zdvihu C časování při vymezení ventilové vůle D vůle ventilu Plnost profilu vačky má zásadní vliv na výkonové parametry motoru. V případě symetrického profilu se hodnota
A zdvih ventilu B časování při 1mm zdvihu C časování při vymezení ventilové vůle D vůle ventilu Plnost profilu vačky má zásadní vliv na výkonové parametry motoru. V případě symetrického profilu se hodnota
PŘÍKLADY Z HYDRODYNAMIKY Poznámka: Za gravitační zrychlení je ve všech příkladech dosazována přibližná hodnota 10 m.s -2.
 PŘÍKLADY Z HYDRODYNAMIKY Poznámka: Za gravitační zrychlení je ve všech příkladech dosazována přibližná hodnota 10 m.s -. Řešené příklady z hydrodynamiky 1) Příklad užití rovnice kontinuity Zadání: Vodorovným
PŘÍKLADY Z HYDRODYNAMIKY Poznámka: Za gravitační zrychlení je ve všech příkladech dosazována přibližná hodnota 10 m.s -. Řešené příklady z hydrodynamiky 1) Příklad užití rovnice kontinuity Zadání: Vodorovným
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Autor: Vladimír Švehla
 Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
Pilotové základy úvod
 Inženýrský manuál č. 12 Aktualizace: 04/2016 Pilotové základy úvod Program: Pilota, Pilota CPT, Skupina pilot Cílem tohoto inženýrského manuálu je vysvětlit praktické použití programů GEO 5 pro výpočet
Inženýrský manuál č. 12 Aktualizace: 04/2016 Pilotové základy úvod Program: Pilota, Pilota CPT, Skupina pilot Cílem tohoto inženýrského manuálu je vysvětlit praktické použití programů GEO 5 pro výpočet
1141 HYA (Hydraulika)
") ČVUT v Praze, fakulta stavební katedra hydrauliky a hydrologie (K4) Přednáškové slidy předmětu 4 HYA (Hydraulika) verze: 09/008 K4 Fv ČVUT Tato webová stránka nabízí k nahlédnutí/stažení řadu pdf souborů
ČVUT v Praze, fakulta stavební katedra hydrauliky a hydrologie (K4) Přednáškové slidy předmětu 4 HYA (Hydraulika) verze: 09/008 K4 Fv ČVUT Tato webová stránka nabízí k nahlédnutí/stažení řadu pdf souborů
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
Výpočet přetvoření a dimenzování pilotové skupiny
 Inženýrský manuál č. 18 Aktualizace: 08/2018 Výpočet přetvoření a dimenzování pilotové skupiny Program: Soubor: Skupina pilot Demo_manual_18.gsp Cílem tohoto inženýrského manuálu je vysvětlit použití programu
Inženýrský manuál č. 18 Aktualizace: 08/2018 Výpočet přetvoření a dimenzování pilotové skupiny Program: Soubor: Skupina pilot Demo_manual_18.gsp Cílem tohoto inženýrského manuálu je vysvětlit použití programu
Výroba tablet. Lisovací nástroje. Inženýrství chemicko-farmaceutických výrob. Lisování tablet. Horní trn (razidlo) Lisovací matrice (forma, lisovnice)
 Lisovací matrice (forma, lisovnice)") Lisování tablet Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY plniva, suchá pojiva, kluzné látky, rozvolňovadla tabletování z granulátu homogenizace TABLETOVINA
Lisování tablet Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY plniva, suchá pojiva, kluzné látky, rozvolňovadla tabletování z granulátu homogenizace TABLETOVINA
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
Mechanika úvodní přednáška
 Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
Mechanika úvodní přednáška Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
6. Statika rovnováha vázaného tělesa
 6. Statika rovnováha vázaného tělesa 6.1 Rovnováha vázaného tělesa Těleso je vystaveno působení vnějších sil akčních, kterými mohou být osamělé síly, spojité zatížení a momenty silových dvojic. Akční síly
6. Statika rovnováha vázaného tělesa 6.1 Rovnováha vázaného tělesa Těleso je vystaveno působení vnějších sil akčních, kterými mohou být osamělé síly, spojité zatížení a momenty silových dvojic. Akční síly
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Obsah 11_Síla _Znázornění síly _Gravitační síla _Gravitační síla - příklady _Skládání sil _PL:
 Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL... 8 17_Skládání různoběžných sil působících v jednom bodě...
Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL... 8 17_Skládání různoběžných sil působících v jednom bodě...
Výroba tablet. Inženýrství chemicko-farmaceutických výrob. Lisování tablet. POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY
 LÉČIVÉ LÁTKY") Lisování tablet Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY plniva, suchá pojiva, kluzné látky, rozvolňovadla tabletování z granulátu homogenizace TABLETOVINA
Lisování tablet Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY plniva, suchá pojiva, kluzné látky, rozvolňovadla tabletování z granulátu homogenizace TABLETOVINA
ELEKTRICKÉ STROJE - POHONY
 ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
ELEKTRICKÉ STROJE - POHONY Ing. Petr VAVŘIŇÁK 2013 2.1 OBECNÉ ZÁKLADY EL. POHONŮ 2. ELEKTRICKÉ POHONY Pod pojmem elektrický pohon rozumíme soubor elektromechanických vazeb a vztahů mezi elektromechanickou
Víceprošlupní tkací stroje
 Teorie tkaní Víceprošlupní tkací stroje M. Bílek, J. Dvořák 2017 Víceprošlupní tkací stroje možnost nahrazení diskontinuálního tkacího procesu kontinuálním Řešení potřeby zvýšit otáčky stroje a snížit
Teorie tkaní Víceprošlupní tkací stroje M. Bílek, J. Dvořák 2017 Víceprošlupní tkací stroje možnost nahrazení diskontinuálního tkacího procesu kontinuálním Řešení potřeby zvýšit otáčky stroje a snížit
Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);
, který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);") Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
MECHANIKA PODZEMNÍCH KONSTRUKCÍ Statické řešení výztuže podzemních děl
 STUDIJNÍ PODPORY PRO KOMBINOVANOU FORMU STUDIA NAVAZUJÍCÍHO MAGISTERSKÉHO PROGRAMU STAVEBNÍ INŽENÝRSTVÍ -GEOTECHNIKA A PODZEMNÍ STAVITELSTVÍ MECHANIKA PODZEMNÍCH KONSTRUKCÍ Statické řešení výztuže podzemních
STUDIJNÍ PODPORY PRO KOMBINOVANOU FORMU STUDIA NAVAZUJÍCÍHO MAGISTERSKÉHO PROGRAMU STAVEBNÍ INŽENÝRSTVÍ -GEOTECHNIKA A PODZEMNÍ STAVITELSTVÍ MECHANIKA PODZEMNÍCH KONSTRUKCÍ Statické řešení výztuže podzemních
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
Fyzika - Kvinta, 1. ročník
 - Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
- Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
Teoretické otázky z hydromechaniky
 Teoretické otázky z hydromechaniky 1. Napište vztah pro modul pružnosti kapaliny (+ popis jednotlivých členů a 2. Napište vztah pro Newtonův vztah pro tečné napětí (+ popis jednotlivých členů a 3. Jaká
Teoretické otázky z hydromechaniky 1. Napište vztah pro modul pružnosti kapaliny (+ popis jednotlivých členů a 2. Napište vztah pro Newtonův vztah pro tečné napětí (+ popis jednotlivých členů a 3. Jaká
Téma 12, modely podloží
 Téma 1, modely podloží Statika stavebních konstrukcí II., 3.ročník bakalářského studia Úvod Winklerův model podloží Pasternakův model podloží Pružný poloprostor Nosník na pružném Winklerově podloží, řešení
Téma 1, modely podloží Statika stavebních konstrukcí II., 3.ročník bakalářského studia Úvod Winklerův model podloží Pasternakův model podloží Pružný poloprostor Nosník na pružném Winklerově podloží, řešení
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
FAKULTA STAVEBNÍ. Stavební statika. Telefon: WWW:
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ Stavební statika Přednáška 2 pro kombinované studium Jiří Brožovský Kancelář: LP C 303/1 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ Stavební statika Přednáška 2 pro kombinované studium Jiří Brožovský Kancelář: LP C 303/1 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
Kapitola 4. Tato kapitole se zabývá analýzou vnitřních sil na rovinných nosnících. Nejprve je provedena. Každý prut v rovině má 3 volnosti (kap.1).
.") Kapitola 4 Vnitřní síly přímého vodorovného nosníku 4.1 Analýza vnitřních sil na rovinných nosnících Tato kapitole se zabývá analýzou vnitřních sil na rovinných nosnících. Nejprve je provedena rekapitulace
Kapitola 4 Vnitřní síly přímého vodorovného nosníku 4.1 Analýza vnitřních sil na rovinných nosnících Tato kapitole se zabývá analýzou vnitřních sil na rovinných nosnících. Nejprve je provedena rekapitulace
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu
 Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Numerické modelování interakce proudění a pružného tělesa v lidském vokálním traktu Vedoucí práce: doc. Ing. Petr Šidlof, Ph.D. Bc. Petra Tisovská 22. května 2018 Studentská 2 461 17 Liberec 2 petra.tisovska@tul.cz
Katedra geotechniky a podzemního stavitelství
 Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Metoda oddělených elementů (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Metoda oddělených elementů (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. )
") ( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
( LEVEL 2 něco málo o matematickém popisu, tvorbě simulačního modelu a práci s ním. ) GRATULUJI! Pokud jste se rozhodli pro čtení této části proto, abyste se dostali trochu více na kloub věci, jste zvídaví
Komponenta Vzorce a popis symbol propojení Hydraulický válec jednočinný. d: A: F s: p provoz.: v: Q přítok: s: t: zjednodušeně:
 Plánování a projektování hydraulických zařízení se provádí podle nejrůznějších hledisek, přičemž jsou hydraulické elementy voleny podle požadovaných funkčních procesů. Nejdůležitějším předpokladem k tomu
Plánování a projektování hydraulických zařízení se provádí podle nejrůznějších hledisek, přičemž jsou hydraulické elementy voleny podle požadovaných funkčních procesů. Nejdůležitějším předpokladem k tomu
Katedra geotechniky a podzemního stavitelství
 Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Modelování zatížení tunelů (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
Katedra geotechniky a podzemního stavitelství Modelování v geotechnice Modelování zatížení tunelů (prezentace pro výuku předmětu Modelování v geotechnice) doc. RNDr. Eva Hrubešová, Ph.D. Inovace studijního
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
STATIKA Fakulta strojní, prezenční forma, středisko Šumperk
 STATIKA 2013 Fakulta strojní, prezenční forma, středisko Šumperk Př. 1. Určete výslednici silové soustavy se společným působištěm (její velikost a směr). Př. 2. Určete výslednici silové soustavy se společným
STATIKA 2013 Fakulta strojní, prezenční forma, středisko Šumperk Př. 1. Určete výslednici silové soustavy se společným působištěm (její velikost a směr). Př. 2. Určete výslednici silové soustavy se společným
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í
 DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
Mechanika - síla. Zápisy do sešitu
 Mechanika - síla Zápisy do sešitu Síla a její znázornění 1/3 Síla popisuje vzájemné působení těles (i prostřednictvím silových polí). Účinky síly: 1.Mění rychlost a směr pohybu 2.Deformační účinky Síla
Mechanika - síla Zápisy do sešitu Síla a její znázornění 1/3 Síla popisuje vzájemné působení těles (i prostřednictvím silových polí). Účinky síly: 1.Mění rychlost a směr pohybu 2.Deformační účinky Síla
Výroba tablet. Fáze lisování. Lisovací nástroje. Typy tabletovacích lisů. Inženýrství chemicko-farmaceutických výrob
 Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY piva, suchá pojiva, kluzné látky, rozvolňovadla homogenizace homogenizace tabletování z granulátu TABLETOVINA
Výroba tablet GRANULÁT POMOCNÉ LÁTKY (kluzné látky, rozvolňovadla) LÉČIVÉ LÁTKY POMOCNÉ LÁTKY piva, suchá pojiva, kluzné látky, rozvolňovadla homogenizace homogenizace tabletování z granulátu TABLETOVINA
mechanická práce W Studentovo minimum GNB Mechanická práce a energie skalární veličina a) síla rovnoběžná s vektorem posunutí F s
 síla rovnoběžná s vektorem posunutí F s") 1 Mechanická práce mechanická práce W jednotka: [W] = J (joule) skalární veličina a) síla rovnoběžná s vektorem posunutí F s s dráha, kterou těleso urazilo 1 J = N m = kg m s -2 m = kg m 2 s -2 vyjádření
1 Mechanická práce mechanická práce W jednotka: [W] = J (joule) skalární veličina a) síla rovnoběžná s vektorem posunutí F s s dráha, kterou těleso urazilo 1 J = N m = kg m s -2 m = kg m 2 s -2 vyjádření
Mechanika tekutin. Tekutiny = plyny a kapaliny
 Mechanika tekutin Tekutiny = plyny a kapaliny Vlastnosti kapalin Kapaliny mění tvar, ale zachovávají objem jsou velmi málo stlačitelné Ideální kapalina: bez vnitřního tření je zcela nestlačitelná Viskozita
Mechanika tekutin Tekutiny = plyny a kapaliny Vlastnosti kapalin Kapaliny mění tvar, ale zachovávají objem jsou velmi málo stlačitelné Ideální kapalina: bez vnitřního tření je zcela nestlačitelná Viskozita
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Numerické metody. Numerické modelování v aplikované geologii. David Mašín. Ústav hydrogeologie, inženýrské geologie a užité geofyziky
 Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
CVIČENÍ č. 11 ZTRÁTY PŘI PROUDĚNÍ POTRUBÍM
 CVIČENÍ č. 11 ZTRÁTY PŘI PROUDĚNÍ POTRUBÍM Místní ztráty, Tlakové ztráty Příklad č. 1: Jistá část potrubí rozvodného systému vody se skládá ze dvou paralelně uspořádaných větví. Obě potrubí mají průřez
CVIČENÍ č. 11 ZTRÁTY PŘI PROUDĚNÍ POTRUBÍM Místní ztráty, Tlakové ztráty Příklad č. 1: Jistá část potrubí rozvodného systému vody se skládá ze dvou paralelně uspořádaných větví. Obě potrubí mají průřez
Ing. Jan BRANDA PRUŽNOST A PEVNOST
 Ing. Jan BRANDA PRUŽNOST A PEVNOST Výukový text pro učební obor Technik plynových zařízení Vzdělávací oblast RVP Plynová zařízení a Tepelná technika (mechanika) Pardubice 013 Použitá literatura: Technická
Ing. Jan BRANDA PRUŽNOST A PEVNOST Výukový text pro učební obor Technik plynových zařízení Vzdělávací oblast RVP Plynová zařízení a Tepelná technika (mechanika) Pardubice 013 Použitá literatura: Technická
7. MECHANIKA TEKUTIN - statika
 7. - statika 7.1. Základní vlastnosti tekutin Obecným pojem tekutiny jsou myšleny. a. Mají společné vlastnosti tekutost, částice jsou od sebe snadno oddělitelné, nemají vlastní stálý tvar apod. Reálné
7. - statika 7.1. Základní vlastnosti tekutin Obecným pojem tekutiny jsou myšleny. a. Mají společné vlastnosti tekutost, částice jsou od sebe snadno oddělitelné, nemají vlastní stálý tvar apod. Reálné
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
KMITÁNÍ PRUŽINY. Pomůcky: Postup: Jaroslav Reichl, LabQuest, sonda siloměr, těleso kmitající na pružině
 KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
KMITÁNÍ PRUŽINY Pomůcky: LabQuest, sonda siloměr, těleso kmitající na pružině Postup: Těleso zavěsíme na pružinu a tu zavěsíme na pevně upevněný siloměr (viz obr. ). Sondu připojíme k LabQuestu a nastavíme
Statika tuhého tělesa Statika soustav těles
 Statika tuhého tělesa Statika soustav těles Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Statika tuhého tělesa Statika soustav těles Petr Šidlof TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Počítačová dynamika tekutin (CFD) Základní rovnice. - laminární tok -
 Základní rovnice. - laminární tok -") Počítačová dynamika tekutin (CFD) Základní rovnice - laminární tok - Základní pojmy 2 Tekutina nemá vlastní tvar působením nepatrných tečných sil se částice tekutiny snadno uvedou do pohybu (výjimka některé
Počítačová dynamika tekutin (CFD) Základní rovnice - laminární tok - Základní pojmy 2 Tekutina nemá vlastní tvar působením nepatrných tečných sil se částice tekutiny snadno uvedou do pohybu (výjimka některé
Nauka o materiálu. Přednáška č.4 Úvod do pružnosti a pevnosti
 Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Výpočet svislé únosnosti a sedání skupiny pilot
 Inženýrský manuál č. 17 Aktualizace: 04/2016 Výpočet svislé únosnosti a sedání skupiny pilot Proram: Soubor: Skupina pilot Demo_manual_17.sp Úvod Cílem tohoto inženýrského manuálu je vysvětlit použití
Inženýrský manuál č. 17 Aktualizace: 04/2016 Výpočet svislé únosnosti a sedání skupiny pilot Proram: Soubor: Skupina pilot Demo_manual_17.sp Úvod Cílem tohoto inženýrského manuálu je vysvětlit použití
Hydrodynamické mechanismy
 Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
Hydrodynamické mechanismy Pracují s kapalným médiem (hydraulická kapalina na bázi ropného oleje) a využívají silových účinků, které provázejí změny proudění kapaliny. Zařazeny sem jsou pouze mechanismy
Statika tuhého tělesa Statika soustav těles. Petr Šidlof
 Statika tuhého tělesa Statika soustav těles Petr Šidlof Rovnováha volného tuhého tělesa (1) Hmotný bod: v rovnováze když rovnováha sil F 0 Tuhé těleso: v rovnováze když rovnováha sil a momentů F 0, M 0
Statika tuhého tělesa Statika soustav těles Petr Šidlof Rovnováha volného tuhého tělesa (1) Hmotný bod: v rovnováze když rovnováha sil F 0 Tuhé těleso: v rovnováze když rovnováha sil a momentů F 0, M 0
Okamžitý výkon P. Potenciální energie E p (x, y, z) E = x E = E = y. F y. F x. F z
 E = x E = E = y. F y. F x. F z") 5. Práce a energie 5.1. Základní poznatky Práce W jestliže se hmotný bod pohybuje po trajektorii mezi body (1) a (), je práce definována křivkovým integrálem W = () () () F dr = Fx dx + Fy dy + (1) r r
5. Práce a energie 5.1. Základní poznatky Práce W jestliže se hmotný bod pohybuje po trajektorii mezi body (1) a (), je práce definována křivkovým integrálem W = () () () F dr = Fx dx + Fy dy + (1) r r
Je-li poměr střední Ø pružiny k Ø drátu roven 5 10% od kroutícího momentu. Šroub zvedáku je při zvedání namáhán kombinací tlak, krut, případně vzpěr
 PRUŽINY Která pružina může být zatížena silou kolmou k ose vinutí zkrutná Výpočet tuhosti trojúhelníkové lisové pružiny k=f/y K čemu se používá šroubová zkrutná pružina kolíček na prádlo Lisová pružina
PRUŽINY Která pružina může být zatížena silou kolmou k ose vinutí zkrutná Výpočet tuhosti trojúhelníkové lisové pružiny k=f/y K čemu se používá šroubová zkrutná pružina kolíček na prádlo Lisová pružina
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
Hydromechanické procesy Obtékání těles
 Hydromechanické procesy Obtékání těles M. Jahoda Klasifikace těles 2 Typy externích toků dvourozměrné osově symetrické třírozměrné (s/bez osy symetrie) nebo: aerodynamické vs. neaerodynamické Odpor a vztlak
Hydromechanické procesy Obtékání těles M. Jahoda Klasifikace těles 2 Typy externích toků dvourozměrné osově symetrické třírozměrné (s/bez osy symetrie) nebo: aerodynamické vs. neaerodynamické Odpor a vztlak
1 Rozdělení mechaniky a její náplň 2
 Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................
Obsah 1 Rozdělení mechaniky a její náplň 2 2 Kinematika hmotného bodu 6 2.1 Křivočarý pohyb bodu v rovině................. 7 2.2 Přímočarý pohyb hmotného bodu................ 9 2.2.1 Rovnoměrný pohyb....................
NÁHODNÁ VELIČINA. 3. cvičení
 NÁHODNÁ VELIČINA 3. cvičení Náhodná veličina Náhodná veličina funkce, která každému výsledku náhodného pokusu přiřadí reálné číslo. Je to matematický model popisující více či méně dobře realitu, který
NÁHODNÁ VELIČINA 3. cvičení Náhodná veličina Náhodná veličina funkce, která každému výsledku náhodného pokusu přiřadí reálné číslo. Je to matematický model popisující více či méně dobře realitu, který