Kartografie I. RNDr. Ladislav Plánka, CSc. Institut geodézie a důlního měřictví, Hornicko-geologická fakulta, VŠB TU Ostrava
|
|
|
- Jana Bílková
- před 6 lety
- Počet zobrazení:
Transkript
1 Kartografie I Matematické a geometrické základy kartografických děl RNDr. Ladislav Plánka, CSc. Institut geodézie a důlního měřictví, Hornicko-geologická fakulta, VŠB TU Ostrava Podkladové materiály pro přednáškový cyklus předmětu Kartografie I (jazyková ani odborná korektura neprovedena)
2 Úvod Země má nepravidelný tvar, proto není její povrch obvykle rozvinutelný do roviny bez deformací (kartografického zkreslení). Metodami převodu sférických ploch do roviny se v rámci kartografie zabývá matematická kartografie, která stanovuje i hodnoty zkreslení, ke kterému v každém bodě mapy dochází.
3 Základy sférické trigonometrie
4 Základy sférické trigonometrie Exces: P R 1 2R absin( 2 2 )
5 Základy sférické trigonometrie sinová věta sina sin sin b sin cosinová věta pro stranu a pro úhel cosa cosb cosc sinb sinc cos cos cos cos sinsin cosa sinucosinová věta pro stranu a přilehlý úhel sin a cos sin c cosb cosc sin b cos sin a cos sin b cosc cosb sin c cos
6 Neperovo pravidlo Neperovo pravidlo můžeme použít pouze v pravoúhlém sférickém trojúhelníku, kde je strana c naproti pravému úhlu. Kosinus kteréhokoliv prvku se rovná: o součinu kotangent prvků přilehlých, např. o součinu sinů prvků protilehlých

7 Neperovo pravidlo
8 Referenční plochy
9 Vznik mapy reálný povrch referenční povrch mapa (kartografické dílo)
10 Referenční plochy: rovina, topografická plocha - spojitá, vyhlazuje mikrostrukturu a bezvýznamné tvary, hladinová plocha - souvislá plocha ortogonální k tížnicím (např. geoid), jednoduché matematické plochy (rovina, válcová plocha, kuželová plocha), povrch referenčního tělesa (koule, elipsoid).
11 Topografická plocha Povrch zemského tělesa je velice složitý a členitý a v modelech krajinné sféry je těžko zobrazitelný. Proto je pro vytváření těchto modelů nahrazován topografickou plochou, která je spojitou plochou vyhlazující mikrostrukturu a ty terénní tvary, které jsou z hlediska rozlišovací úrovně modelu bezvýznamné. Topografická plocha je však stále poměrně složitá pro přímé zobrazování do map nebo pro definování digitálních modelů. Pro účely mapování a tvorby modelů terénu se tato plocha nahrazuje referenčními plochami, které jsou jednodušší a jsou matematicky nebo fyzikálně přesně definované.
12 Jednoduché matematické plochy: kuželová plocha, válcová plocha, rovina, a to: pro tvorbu plánu, tj. území okrouhlého tvaru do maximální plochy cca 200 km 2, tj. kruh o poloměru 8 km, resp. pro méně přesné práce cca 700 km 2, tj. kruh o poloměru 15 km (ortogonální promítání), pro tvorbu kartografických děl větších územních celků (azimutální kartografická zobrazení).
13 Referenční tělesa Geoid (určen především pro výšková měření) - je definován jako plocha, na které mají všechny body stejný geopotenciál. Protože je geoid definován jako fyzikální těleso, je jeho matematické vyjádření značně složité (viz dále). (Zemská) koule (poloměr km) a/nebo referenční koule. (Zemský) elipsoid a/nebo referenční elipsoid.
: Pro ČR se střední geografickou šířkou φ = 49 30 a za použití Besselova elipsoidu je: R m = 6")
14 Referenční koule Nejčastěji volíme poloměr koule jako tzv. střední poloměr křivosti (viz dále): Pro ČR se střední geografickou šířkou φ = a za použití Besselova elipsoidu je: R m = ,6105 m. Při stejném objemu elipsoidu a koule je: R m = 6 370,3 km.
15 Meridiánový poloměr křivosti M Závisí na zeměpisné šířce. M a(1 e 2 ) e sin 2
16 Příčný poloměr křivosti N Pro všechny body na rovnoběžce je stejný. N a cos 1 1 e 2 sin 2 2
17 Elementy poledníkového a rovnoběžkového oblouku
18 Elementy poledníkového a rovnoběžkového oblouku Pozn.: zeměpisná šířka na kouli (U), resp. na elipsoidu (φ) a zeměpisná délka na kouli (V), resp. na elipsoidu (λ) - viz dále. koule ds p R du d s r R cos U dv elipsoid ds p M d ds r N cos d
19 Délka poledníkového/rovnoběžkového oblouku Výpočet délky poledníkového oblouku: s p R U ( s U j ) Výpočet délky rovnoběžkového oblouku: Poloměr rovnoběžky: r R cosu Délka rovnoběžkového oblouku: s r r ( Vv z V )
20 Rotační elipsoid Matematicky pravidelná plocha, odchyluje se pouze málo od geoidu. Normála k elipsoidu a tížnice ke geoidu nejsou totožné (vzniká tzv. tížnicová odchylka. Rozlišujeme: a) Zemský (rotační) elipsoid (aproximace geoidu) Střed zemského elipsoidu je totožný s hmotným středem Země (geocentrem). Malá poloosa zemského elipsoidu je totožná se středem rotace. b) Referenční (rotační) elipsoid (aproximace části geoidu) Střed referenčního elipsoidu nemusí být totožný se středem Země. Na vybraném území aproximuje geoid referenční elipsoid lépe než zemský elipsoid.
21 Rotační elipsoid Konstanty rotačního elipsoidu (vznikne rotací elipsy podle jedné z poloos, v případ Země podle vedlejší poloosy): a b e 2 e 2 i W V hlavní (také velká ) poloosa vedlejší (také malá ) poloosa numerická výstřednost (excentricita) druhá excentricita zploštění první geodetická funkce druhá geodetická funkce W = 1 e 2 sin 2 φ V = 1 + e 2 cos 2 φ

22 Trojosý elipsoid
23 Konstanty nejznámějších referenčních elipsoidů Označení a (m) b (m) i Zachův ,113 1:310 Clarke :293,5 Bessel , ,9632 1:299, Krasovský , ,0188 1:298,3 IAG , ,5161 1: 298,247 Hayford , ,946 1:297,00 WGS :298,257
24 Referenční elipsoid x koule Referenční elipsoid se zpravidla používá v případech, kdy je požadováno minimální zkreslení rovinného obrazu. Volí se zejména u kartografických zobrazení, která jsou využívána při definici státních a mezinárodních geodetických souřadnicových systémů a při tvorbě základních mapových děl velkých a středních měřítek.
25 Referenční elipsoid x koule Referenční koule se používá pro zobrazení s nižšími nároky na velikost zkreslení. Při využití referenční koule jsou zobrazovací rovnice podstatně jednodušší než u referenčního elipsoidu. Tento způsob se uplatňuje hlavně při tvorbě map malých měřítek a při řešení jednoduchých navigačních úloh.
26 Referenční elipsoid x koule Zvláštním případem je tzv. dvojité zobrazení, kdy je referenční elipsoid nejprve zobrazen na kouli, která je pak následně teprve zobrazena do roviny. Povrch koule je tak první zobrazovací plochou, rovina je až druhou.
27 Náhrada referenčního elipsoidu koulí Náhrada elipsoidu koulí na menším území: R = a R = b R = střední poloměr křivosti Náhrada elipsoidu koulí globálně: Koule má stejný objem jako elipsoid R R MN 3 a 2 b Koule má stejný povrch jako elipsoid R 2a 2 3 b 2
28 Geoid je idealizované těleso omezené nulovou hladinovou plochou, která je ztotožněna se střední klidnou hladinou světového oceánu a odtud proložená i pod kontinenty, kde s určitým zjednodušením kopíruje velké terénní nerovnosti. Vlastnosti: v každém bodě je jeho povrch kolmý na směr zemské tíže, má nepravidelný tvar (konvexní/konkávní) ovlivněný rozložením hmot v tělese Země, průběh tvaru geoidu se zjišťuje kombinací především geodetických, astronomických a gravimetrických měření. Průběh geoidu je t.č. znám s přesností v řádech 0,1 1 m.
29 F síla přitažlivá P síla odstředivá G zemská tíže (gravitace) Geoid
30
31 Souřadnicové soustavy na sférické ploše Sférické souřadnicové systémy Pravoúhlé souřadnicové systémy Polární souřadnicové systémy
32 Sférické souřadnicové soustavy Zeměpisné souřadnice -, (U, V) Geocentrické (redukované) souřadnice - β (), Kartografické souřadnice - Š, D Izometrické souřadnice - ξ, η nebo q, aj. Pozn.: ξ nebo ξ = (x) ksí; η = (é) éta, = psí
 a rovinou rovníku. Na elipsoidu ji označujeme φ, na kouli U (na severní polokouli je kladná).")
33 Zeměpisné (geografické, geodetické) souřadnice... představují určení polohy bodu na ploše elipsoidu (koule) pomocí zeměpisné (geografické, geodetické) šířky a zeměpisné (geografické, geodetické) délky. Zeměpisná šířka φ se definuje jako úhel mezi normálou k ploše elipsoidu (koule) a rovinou rovníku. Na elipsoidu ji označujeme φ, na kouli U (na severní polokouli je kladná). Zeměpisná délka je úhlová vzdálenost libovolného bodu na zeměkouli od konvenčně zvoleného nultého poledníku. Na elipsoidu ji značíme λ, na kouli V (na východní polokouli je kladná).

34 Zeměpisné a geocentrické souřadnice
35 Zeměpisné souřadnice Azimut A je úhel, měřený od severního směru ve směru hodinových ručiček, který svírá místní poledník s danou stranou. Laplaceův bod je bod, na němž byla určená geodetická zeměpisná šířka, délka a azimut a alespoň astronomická zeměpisná délka a azimut. Laplaceovy body představují základní opěrné body geodetických sítí.
 má stejnou definici jako zeměpisná délka. tg 2 1 e tg Geocentrických souřadnic se užívá především v astronomii a navigaci. Pro kulovou referenční plochu platí U = =.")
36 Geocentrické souřadnice Geocentrická šířka () je úhel, který svírá spojnice bodu na referenčním elipsoidu se středem elipsoidu a rovinou rovníku. Geocentrická délka (λ) má stejnou definici jako zeměpisná délka. tg 2 1 e tg Geocentrických souřadnic se užívá především v astronomii a navigaci. Pro kulovou referenční plochu platí U = =. Pro řešení některých teoretických úloh na ploše referenčního elipsoidu se užívá redukované geocentrické šířky. Pro kulovou referenční plochu platí U = = =.
37 (Redukovaná) geocentrická šířka Bod Q je afinní bod k bodu P a leží na kouli. Úhel je (redukovaná) geocentrická šířka, tedy úhel ( 90 ), který svírá spojnice SQ s rovinou rovníku. Platí: tgβ = 1 e 2 tgψ = 1 e 2 tgψ tgφ
38 Souřadnicový systém na sférické ploše tvoří: poledníky průsečíky rovin procházejících osou rotace s povrchem sférického tělesa, rovnoběžky průsečíky rovin rovnoběžných s rovníkem s povrchem sférického tělesa. Jakýmkoliv místem na ploše sférického tělesa prochází místní poledník a místní rovnoběžka. V každém souřadnicovém systému na sférické ploše definujeme základní (nultý) poledník a základní (nultou) rovnoběžku.
39 Základní poledník Mercator vedl počáteční poledník ostrovem Corvo ze skupiny Azorů, protože se tam úchylka magnetické střelky rovnala nule. Na mys Orchilla na ostrově Ferro, se klade nultý poledník v letech (viz dále). Do té doby, pomineme-li např. alexandrijský poledník aj. historické pokusy, se používal jako nultý poledník azorský, neboli kapverdský (holandští a angličtí kartografové), pařížský, norimberský, boloňský, berlínský, vídeňský, budapešťský, petrohradský, bratislavský (prešpurský) aj.
40 Základní poledník Od roku 1833 platí pro Evropu a od roku 1884 pro celý svět jako nultý greenwichský poledník. Byl definován pomocí astronomických měření. V současné době je jeho označení již jen historickou setrvačností, neboť základní poledník je vlivem kolísání pólu s časem proměnný. V současnosti je permanentně zaměřován a vypočítáván Mezinárodní časovou službou v Paříži a přesně neodpovídá původnímu poledníku (neprochází oním základním bodem v Greenwichi).


41 Základní poledník Ferro (El Hierro) Greenwich Z hlediska turisty stojícího před Královskou observatoří v Greenwichi: linie o nulové zeměpisné délce se ve skutečnosti nachází 102 m na východ od tabule s nápisem Základní poledník světa a čáry, která se od ní táhne.
42 Základní poledník Základní poledník procházející mysem Orchilla na nejzápadnějším ostrově Ferro (El Hiero) Kanárského souostroví byl původně definován jako bod 20 na západ od pařížského poledníku (ve skutečnosti 20 23'9"; tj '51" západně od Greenwiche). Kolem roku 1890 změřil německý geodet Carl Theodor Albrecht, že ferrský poledník má polohu 17 39' 46,02" západní délky. Při stanovování geodetické sítě byla ve 20. letech 20. století v Německu, Rakousku a v Československu použita hodnota 17 40' především z praktických důvodů.

 Monte")
43 Základní poledník Pulkovo u Petrohradu (např. pro S-42) Monte Mario (Roma)
44 Nekriticky převzaté hodnoty odstupů vybraných základních poledníků od greenwichského poledníku podle různých autorů (červeně přednostní): Název poledníku Ferro Odstup od Greenwiche , ,7 Amsterodam ,9 Paris ,95 Madrid ,55 Lisabon (San Jorge) ,81 Roma (Monte Mario) Pulkovo ,02 (Buchar, E.) , , , , , ,318 (S-42)
45 Základní rovnoběžka Základní rovnoběžkou je rovník (ekvátor). Rovník je nejdelší rovnoběžka, neboli čára spojující body s nulovou zeměpisnou šířkou. Je jedinou rovnoběžkou, která je ortodromou (viz dále). Rovník je průsečnice zemského povrchu s rovinou, procházející středem Země a kolmou k zemské ose.
![Ortogonální (Soldnerovy) souřadnice Zvolme bod Q [U 0 ; V 0 ].](/docs-images/93/113598990/images/46-0.jpg "Severní větev poledníku procházející tímto bodem označme jako kladnou větev osy x; hlavní kružnice kolmá na")
46 Ortogonální (Soldnerovy) souřadnice Zvolme bod Q [U 0 ; V 0 ]. Severní větev poledníku procházející tímto bodem označme jako kladnou větev osy x; hlavní kružnice kolmá na poledník procházející bodem P pak tvoří osu y.

, kde: α 10 - sférický směrník γ - meridiánová")
47 Polární sférické souřadnice Polohu dvou bodů na referenční ploše můžeme určit pomocí azimutu A jejich spojnice s (viz obr.), kde: α 10 - sférický směrník γ - meridiánová konvergence (γ = A 10 α 10 )
48 Geodetické souřadnicové systémy (1/2) Hodnoty souřadnic v geodetických souřadnicových systémech jsou v současné době zjišťovány pomocí metod kosmické geodézie, např.: VLBI (Very Long Baseline Interferometry) je technologie zaměřování velmi vzdálených kvasarů, používá se především při definici polohy referenčních soustav (ICRF) a určování přesného univerzálního času (UT). Podstata spočívá v určování časového posunu a změny tohoto časového posunu v čase příchodu stejné vlny rádiového záření pocházejícího z mimogalaktických zdrojů na alespoň dva radioteleskopy. Přesnost je v řádu mikrosekund. SLR (Satellite Laser Ranging) je technologie zaměřování vzdálenosti mezi pozemní stanicí a družicí pulsním laserem. Střední kvadratická chyba je 2-3 cm. LLR (Lunar Laser Ranging) měří vzdálenost mezi Zemí a Měsícem se střední kvadratickou chybou 1-5 cm.
49 Geodetické souřadnicové systémy (2/2) GNSS (Global Navigation Satellite System) je rádiový dálkoměrný systém, kdy pomocí známé polohy družic a časovému zpoždění rádiové vlny mezi vysílačem (družice) a přijímačem lze určit polohu přijímače. Přesnost určení polohy je závislá na druhu a metodě GNSS (ve speciálních nebo vědeckých aplikacích může být až několik cm či mm). DORIS (Doppler Obitography and Radiopositioning Integrated by Satellite) je systém založený na měření změn radiální vzdálenosti mezi pozemní stanicí a družicí na základě dopplerovského jevu. Přesnost změny vzdálenosti je charakterizována střední kvadratickou chybou 0,4 mm/s. PRARE (Precise Range And Range-rate Equipment) je založený na radiovém měření vzdáleností a změn vzdáleností s časem mezi stanicí a družicí.
50 Kartografické souřadnice Pro optimální volbu zobrazení a s tím související polohou zobrazovací plochy je vhodné určovat polohu bodů pomocí tzv. kartografických souřadnic. Osa zobrazovací plochy již nemusí být totožná se zemskou osou. Průsečík osy zobrazovací plochy s referenční plochou je kartografickým pólem Q. Definice kartografických souřadnic Š (kartografická šířka) a D (kartografická délka) je pak analogická k souřadnicím zeměpisným U, V.
51 Kartografické souřadnice Rozvinutelná plocha (např. plášť kužele nebo válce) se musí co nejlépe přimykat k referenční ploše. Proto osa zobrazovací plochy nebývá totožná se zemskou osou. Úloha je dobře řešitelná jen na kouli. Na tuto kouli je nutno nejprve vhodně zobrazit elipsoid. Známe-li souřadnice nového (kartografického) pólu U Q, V Q (dále označeny i jako U K, V K ) a zeměpisné souřadnice bodu P (U,V), pak lze pomocí vět sférické trigonometrie vypočítat kartografické souřadnice Š, D bodu P.


52
53 Zeměpisné a kartografické souřadnice
 a (Š,D) sin sin Š sinu sinu cosu sin V cosu D cosš k k cosu cosv Převod mezi (Š,D) a (U,V) sinu sin Š")
54 Vztahy (U,V) a (Š,D) V obou případech jsou použity věty sférické trigonometrie. Převod mezi (U,V) a (Š,D) sin sin Š sinu sinu cosu sin V cosu D cosš k k cosu cosv Převod mezi (Š,D) a (U,V) sinu sin Š sinu sin DcosŠ sin V cosu k cosš cosu k cosd
55 Izometrické souřadnice Podle matematické definice jsou izometrické souřadnice takové, kde čtverec délkového elementu lze vyjádřit jako součet čtverců délkových elementů v jednotlivých souřadnicových osách, případně ještě vynásobený vhodnou funkcí obou souřadnic.


56 Izometrické souřadnice Izometrických souřadnic se s výhodou užívá při odvozování vztahů pro zkreslení. Označíme-li si je např. ξ, η, pak pro délkový element musí platit vztah: Pro rovinné souřadnice x, y platí: neboli: souřadnice x, y v rovině jsou izometrické.

 platí")
57 Izometrické souřadnice Pro délkový element na kouli (při poloměrech křivosti M, N) platí vztahy:

58 Izometrické souřadnice Aby vztah (viz předcházející snímek) vyhovoval formulaci symetrických souřadnic, pak je třeba užit substituce: Pak platí: Souřadnice q, λ již formulaci vyhovují a jsou tedy izometrické.

59 Izometrické souřadnice Pro izometrickou šířku q platí: Po dosazení za M a N:

60 Izometrické souřadnice Izometrickou šířku na kouli označujeme Q a vztahy se tak díky M = N = R zjednoduší na:

61 Pravoúhlé prostorové souřadnice Osa X je průsečnice roviny rovníku s rovinu nultého poledníku. Osa Z leží v ose zemské rotace. Osa Y je v rovině rovníku, kolmá na osu X (doplňuje souřadnicovou soustavu na pravotočivou).

62 Pravoúhlé prostorové souřadnice Např. WGS84
63 Polární prostorové souřadnice Sférická soustava polárních souřadnic je soustava souřadnic v prostoru, u které jedna souřadnice ϱ udává vzdálenost bodu od počátku souřadnic, druhá souřadnice φ udává úhel průmětu průvodiče bodu do roviny xy od osy x a třetí souřadnice ϑ úhel průvodiče od zvolené roviny xy, respektive od osy z. x y
64 Srovnej zeměpisné, geocentrické, polární a pravoúhlé prostorové souřadnice.
65 Souřadnice na rovinné ploše Pravoúhlé souřadnice (x, y) bez komentáře Polární souřadnice (ρ, ε)
, - úhel mezi spojnicí počátek-bod P a osou x.")
66 Polární souřadnice Polární souřadnice v rovině kartografického zobrazení (, ): - vzdálenost bodu od počátku souřadného systému (např. obraz vrcholu kužele), - úhel mezi spojnicí počátek-bod P a osou x. Používají se u kuželových a azimutálních zobrazení, především pro snadnější vyjádření zobrazovacích rovnic. x y cos sin
67 Transformace
68 Transformace Základní úlohou matematické kartografie je určení matematických vztahů mezi jednotlivými souřadnicovými systémy a jejich transformace do roviny (kartografické průmětny).
69 Transformační kaskády vybraných národních kartografických děl Vojenské topografické mapy, X, Y Základní mapy ČSR (ČSSR,.), U, V Š, D, X, Y Vojenský zeměpisný atlas (mapy kontinentů) U, V Š, D, X, Y Atlas ČSSR U, V, X, Y
70 Důležité křivky na referenčních plochách
71 Důležité křivky na referenčních plochách Čáry geodetické sítě. Geodetická křivka - čára spojující na referenční ploše nejkratší cestou dva koncové body. Její hlavní normála je v každém bodě totožná s normálou referenční plochy (zemský poledník je geodetickou křivkou, zemská rovnoběžka nikoliv). Ortodroma geodetická křivka na kouli (hlavní kružnice). Loxodroma křivka na referenční ploše, která protíná poledníky pod stejným úhlem.
72 Ortodroma Délku ortodromy mezi dvěma body P 0 a P o souřadnicích U 0,V 0 a U,V vyplyne ze vztahu: Pro azimut počátečního a koncového bodu platí:
73 Loxodroma Pro výpočet délky loxodromy mezi koncovými body o zeměpisných šířkách U 2 a U 1 platí jednoduchý vztah: Azimut loxodromy: tga l cosa = R U 2 U 1 V ln tg 2 U 2 V 1 4 U U 2 1


74 Ortodroma Loxodroma


75
76 Kartografická zobrazení
77 Kartografické zobrazení Kartografické zobrazení je proces, který každému bodu na referenční ploše přiřadí odpovídající bod na zobrazovací ploše. Je matematicky jednoznačně vyjádřen vztahy mezi souřadnicemi bodů na referenční a zobrazovací ploše (v některých případech na dvou referenčních plochách), tzv. zobrazovacími rovnicemi. Speciální typ zobrazení vzniklého promítáním označujeme jako (geometrickou) projekci.
78 Kartografické zobrazení Kartografické zobrazení lze dnes definovat jako metodu matematického přiřazení polohy každého bodu na zemském povrchu (na jeho náhradní ploše, např. referenčním elipsoidu) k témuž bodu na zobrazovací (kartografické) ploše. Poloha bodu na referenčním elipsoidu může být dána buď sférickými souřadnicemi (např. zeměpisná šířka a délka), prostorovými pravoúhlými souřadnicemi (X, Y, Z), nebo prostorovými polárními souřadnicemi (ρ, φ, ϑ).
79 Kartografické zobrazení Každý bod, kartograficky zobrazený na mapě, pak může mít: souřadnice sférické (např. zeměpisné, ) a/nebo rovinné pravoúhlé v použitém kartografickém zobrazení (např. x, y v systému S-42, y, x v S-JTSK či E, N ve WGS 84/UTM) nebo kódované, v tzv. hlásných systémech MGRS (Military Grid Reference System), nebo GEOREF (Geographic Reference Frame) či, parametrické (např. poštovní adresa).
80 Zobrazovací rovnice Zobrazovací rovnice představují předpis pro převod sférických souřadnic na kartografickou plochu (průmětnu). Při tomto převodu obvykle dochází ke (kartografickému) zkreslení. Např. při zobrazení elipsoidu do roviny mapy mají zobrazovací rovnice obecný tvar X = f(φ, λ ) a Y = g (φ, λ ) přičemž funkce f a g jsou spojité, nezávislé a jednoznačně diferencovatelné, póly jsou singulární body.
81 Kartografické zkreslení Kartografické zkreslení je deformace způsobená rozdílnou křivostí originálu a obrazu. Rozlišujeme zkreslení: délkové (m), neboli poměr obrazů délkových elementů nekonečně malé délky na zobrazovací ploše k jejich délce na originálu (referenční ploše), plošné (P), neboli poměr odpovídajících si plošných elementů v obraze a v originále; prakticky se vyšetřuje jako součin délkových zkreslení ve směru poledníkovém a rovníkovém, úhlové (směrníkové), které představuje rozdíl velikosti směrníku (úhlu) v obraze a originálu, geodetické křivosti, což je rozdíl geodetické křivosti obrazu křivky a geodetické křivosti křivky v originále.
82 Ekvideformáty Celkový charakter deformací mapového obrazu umožňují vyhodnocovat tzv. ekvideformáty (též izodeformáty). Tvoří je množina bodů konstantního zkreslení vykreslená v zobrazovací rovině (příklady viz následující snímek). Ekvideformáty mohou být konstruovány pro průběh délkového, plošného nebo úhlového zkreslení. Protože délkové zkreslení je závislé nejen na poloze bodu, ale i na azimutu (s výjimkou konformního zobrazení), mohou délkové ekvideformáty vyjadřovat délkové zkreslení platné pouze pro určitý směr. Zpravidla se volí směr poledníků nebo rovnoběžek. V každém místě se zkreslení mění nejrychleji ve směru kolmém k ekvideformátám.
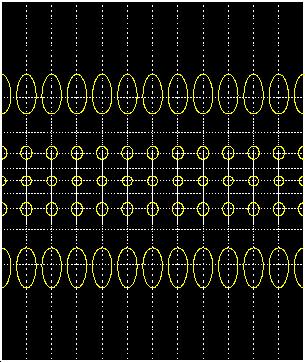
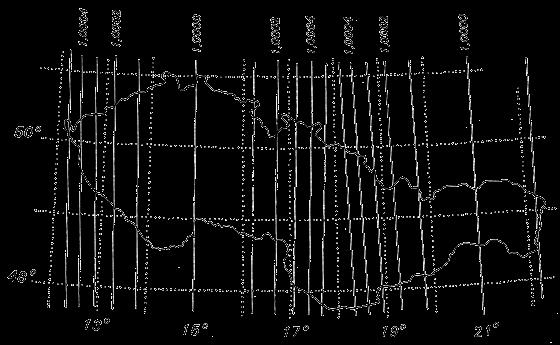
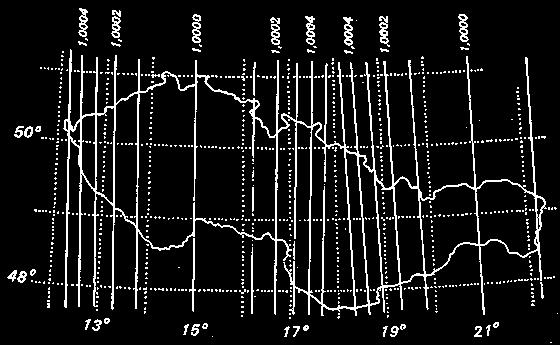
83 Ekvideformáty
84 Limity zkreslení... pro vizuální vjem mapy: maximální zkreslení délek a ploch 8 %, zkreslení úhlů 8,... pro vizuální porovnání map: maximální zkreslení délek a ploch 3 %, zkreslení úhlů 3,... pro kartometrická šetření: maximální zkreslení délek a ploch 0,4 %, zkreslení úhlů 0,5.
85 Délkové zkreslení 2 2 ds dx dy m A 2 ds M 2 d 2 N 2 cos d
86 Délkové zkreslení Je závislé nejen na poloze bodu, ze kterého délkový element vychází, ale i na jeho směru, a proto se vyšetřuje ve dvou základních směrech: poledníkovém (m p ) a rovnoběžkovém (m r ). sin A cosa MN cos g g f 2 f A sin cos N g f A cos M g f m A N cos g f m, M g f m 2 2 r 2 2 p

87 Zkreslení úhlů o A tg tg 180 p tg 1 p tg tg p tg tg d Y d X g f N coscosa N coscosa g f Msin A Msin A a při A=0 tg p g f

88 cos g f g f sin d d 2 1 sin d d 2 1 MN m m r p r p P r p cos g f g f MN obecná podmínka ekvivalentního zobrazení Zkreslení ploch
89 Klasifikace kartografických zobrazení
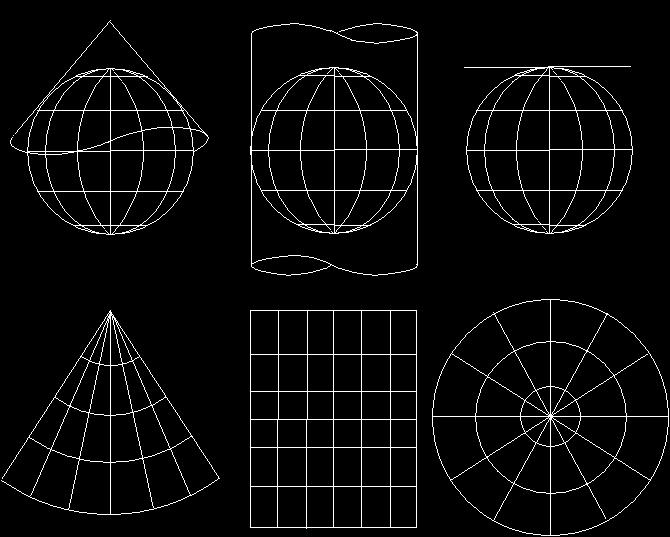
90 Kartografická zobrazení Celkem existuje asi 300 zobrazení (z toho asi 50 je tzv. jednoduchých a 250 obecných), v praxi se používá jen několik desítek zobrazení. Zobrazovací plochu tvoří nejčastěji rovina, plášť válce nebo plášť kužele (poloha obrazu bodu se na ní určuje v pravoúhlých nebo polárních souřadnicích).
91 Klasifikace kartografických zobrazení: podle zkreslení, podle zprostředkující zobrazovací plochy a polohy její konstrukční osy, podle zobrazovacích rovnic a tvaru obrazů poledníků a rovnoběžek, podle ploch, mezi kterými se zobrazuje (tj. elipsoid - koule, koule - rovina, elipsoid - rovina). Sem patří i rozdělení na zobrazení přímé (elipsoid - rovina) a dvojité (elipsoid - koule - rovina).
92 ... podle zkreslení Zobrazení, ve kterých nejsou zkresleny úhly označujeme jako konformní, též úhlojevná, stejnoúhlá. Zobrazení, ve kterých nejsou zkresleny plochy označujeme jako ekvivalentní, též plochojevná, stejnoplochá. Zobrazení, ve kterých nejsou zkresleny délky označujeme jako ekvidistantní (v některém směru), též délkojevná, stejnodélková/stejnodélná. Vyrovnávací (kompenzační), ve kterých je plošné a úhlové zkreslení optimalizováno.
93 ... podle zprostředkující zobrazovací plochy a polohy její konstrukční osy Podle zprostředkující zobrazovací plochy: zobrazení azimutální (dotyková nebo sečná rovina), zobrazení válcová (dotykový nebo sečný válec), zobrazení kuželová (dotykový nebo sečný kužel). Podle polohy konstrukční osy: zobrazení normální (pólová), zobrazení příčná (transversální, rovníková, ekvatoreální), zobrazení obecná (šikmá).

94 Nizozemsko Švýcarsko Často používané Jen ČR a SR
95 ... podle zobrazovacích rovnic Zobrazení na kouli Zobrazení jednoduchá X = f(u), Y = g(v) Zobrazení nepravá X = f(u,v), Y = g(u, V) Zobrazení složená (nesouvislá, složená z více ploch, pásů, pruhů poskytující nesouvislý obraz): polyedrická, polykónická, polykonická Zobrazení neklasifikovaná (jiná, obecná)
96 Zobrazení na kouli Nejjednodušším postupem pro získání obrazu zemského elipsoidu na kouli je prosté nahrazení elipsoidu koulí o vhodném poloměru R. Hodnoty zeměpisných souřadnic se zachovávají. Všechna zkreslení jsou funkcí zeměpisné šířky a kromě úhlového zkreslení závisí na zvoleném poloměru koule R.


97 Zobrazení na kouli U, V m p R M, m r R N, P 2 R MN, sin 2 M N N N
98 Jednoduchá zobrazení Jednoduchá (jednoduše definovaná) zobrazení jsou taková, pro něž je možno napsat takové zobrazovací rovnice, podle nichž každá z rovinných souřadnic (polárních nebo pravoúhlých) a výrazy pro zkreslení (závisle proměnné) se dají vyjádřit funkcemi pouze jedné souřadnice (nezávisle proměnné) na referenční ploše.
99 Zobrazení jednoduchá Kuželová - poledníky tvoří svazek přímek, rovnoběžky kruhové oblouky se společným středem. Např. Ptolemaiovo (ekvidistantní kuželové), Křovákovo (konformní kuželové - část z koule na rovinu). Válcová - poledníky jsou rovnoběžné, stejně odlehlé přímky. Rovnoběžky jsou rovnoběžné přímky. Např. Marinovo (ekvidistantní válcové), Mercatorovo (konformní válcové). Azimutální - vlastnosti jako kuželové.

100
101 (Jednoduchá) azimutální zobrazení...zobrazovací plocha je tečná nebo sečná rovina,...zobrazovací rovnice udávají polární rovinné souřadnice a bodu v mapě tak, že počátek souřadnic leží v pólu (obvykle bod dotyku roviny) a osa leží v obrazu základního poledníku,...obrazy poledníků v normální poloze tvoří trs paprsků (polopřímek) vycházejících z pólu, obrazy rovnoběžek v normální poloze tvoří soustředné kružnice se středem v pólu,...obecné rovnice: r f ()
102 PROJEKCE gno monická stereografická ortografická extern í
103 Azimutální zobrazení Gnómonické Breusingovo Stereografické Postelovo Ortografické Lambertovo
.")
104 Gnómonická projekce r.tg (Thales z Milétu, 7. století př.n.l.) Poledníky se zobrazí jako přímky, rovnoběžky jsou kuželosečky, nelze zobrazit rovník. Zkreslení od pólů k rovníku narůstá. Užití v navigaci a pro zákres ortodrom (z průsečíků se zeměpisnou sítí se překreslí do jiného zobrazení).

. Zobrazení je úhlojevné.")
105 Stereografická projekce (Hipparchos z Nikeie, 2. století př.n.l.) Všechny kružnice na glóbu se zobrazují opět jako kružnic, poloměr obrazu rovníku je 2r (r je poloměr polokoule). Zobrazení je úhlojevné. Nelze zobrazit naráz celý svět. Užívá se v geodézii a astronomii. 2. r.tg 2

 Zobrazení je délkojevné podél rovnoběžek, délkové zkreslení narůstá k rovníku.")
106 Ortografická projekce (Appollonius, 3. století př.n.l.) Zobrazení je délkojevné podél rovnoběžek, délkové zkreslení narůstá k rovníku. V příčné poloze se poledníky zobrazují jako části elips a rovnoběžky jako rovnoběžné přímky, v obecné poloze se obojí zobrazují jako elipsy. V příčné poloze se užívá pro mapy planet. r.sin
107 Breusingovo zobrazení (A. Breusing, 1892) Zobrazení představuje geometrický průměr Lambertova a stereografického zobrazení a patří mezi typická kompenzační zobrazení. Úhlové zkreslení je menší než u Postelova zobrazení, ale plošné zkreslení je větší. Užívá se u map malých měřítek. 2. r.sin.2. r.tg 2 2
 Zobrazení je délkojevné podél")

108 Postelovo zobrazení (Guillaums Postel, 1581) Zobrazení je délkojevné podél poledníků, v jiné něž normální poloze mají poledníky a rovnoběžky velmi složité křivky. r.arc
. 2.")
109 Lambertovo zobrazení (Johan Heinrich Lambert, 1772) Zobrazení je plochojevné, v příčné a obecné poloze mají obrazy poledníků i rovnoběžek složité křivky, vzdálenosti mezi obrazy rovnoběžek se pozvolna zmenšují od středu k okrajům. Užívá se pro geografické úlohy a atlasové mapy). 2. r.sin 2
110 UPS (Universal Polar Stereographic) Užívá se pro polární oblasti od do 90. Tak jako u všech stereografických zobrazení je i v tomto případě na rovinu v normální poloze dotýkající se pólu z protějšího pólu promítán elipsoid. Jako referenční plocha byl zvolen elipsoid WGS84. Pro systém UPS bylo zvoleno měřítkové zkreslení pólu m 0 = 0,994, takže z dotykové roviny se stává rovina sečná. Ta elipsoid protíná přibližně kolem rovnoběžky 81 07'. Ve středu zobrazení je tedy hodnota zkreslení m 0 = 0,994, které roste směrem k nižším zeměpisným šířkám až na hodnotu m 0 = 1, na rovnoběžce 80 00'. Svého maxima (m 0 = 1, ) dosahuje na rovnoběžce 79 30'.

111 (Jednoduchá) válcová zobrazení Zobrazovací plocha je v normální poloze pláštěm válce, která se dotýká zeměkoule podle rovnoběžky nebo jiné kružnice. Zobrazovací rovnice udávají v normální poloze pravoúhlé rovinné souřadnice x a y bodu v mapě tak, že osa x je přímkový obraz rovníku a osa y je přímkový obraz základního poledníku kolmý na obraz rovníku. Obrazy poledníků v normální poloze tvoří úsečky rovnoběžné s osou y kolmé na přímkový obraz rovníku, obrazy rovnoběžek v normální poloze tvoří úsečky rovnoběžné s osou x. Obecné rovnice: x = r.arc (tečný), x = r.arc.cos 0 (sečný), y = r.f().
. x r y r.. arc arc")
112 Marinovo zobrazení (Marinos z Tyru 120 n.l., Archimédes, 3. století př.n.l.) Zobrazení je délkojevné podél poledníků a rovníku, má velké zkreslení u pólů. Aplikace: Cassini-Soldnerovo zobrazení - mapy Stabilního katastru, obdélníkové zobrazení - sečný válec). x r y r.. arc arc

113 Lambertovo zobrazení (Johan Heinrich Lambert, 1772) Zobrazení je plochojevné a dále délkojevné podél rovníku. Používá se málo, protože má velké úhlové zkreslení. Plochojevnost se zachová, jestliže afinně zkreslíme mapu tak, že souřadnici x násobíme koeficientem n a souřadnici y hodnotou 1/n. Položíme-li n = cos 0, budou délkově zachovány rovnoběžky ± 0. x r y r.. arc sin

114 (W. Behrmann, 1909) Behrmannovo zobrazení Zobrazení představuje aplikaci Lambertova zobrazení. Pro 0 = ± 30 je plochojevné a současně podél těchto rovnoběžek i délkojevné. x r. cos 0. arc sin y r. cos 0
115 Samostatná prezentace Viz samostatná prezentace: KARTOGRAFIE_I_08_ZOBRAZENI_UREDNI Cassini-Soldnerovo zobrazení Gaussovo-Krügerovo zobrazení Mercatorovo zobrazení

116 (Jednoduchá) kuželová zobrazení

117 Kuželová zobrazení Zobrazovací plochu tvoří plášť kužele. Zobrazovací rovnice udávají polární rovinné souřadnice a bodu v mapě tak, že osu souřadnice tvoří polopřímka ležící v obrazu základního poledníku, ovšem počátek souřadnic nemusí ležet v pólu (leží v obrazu vrcholu kužele, tj. v obraze kartografického pólu). Plášť kužele se dotýká zeměkoule podle rovnoběžky nebo jiné kružnice
118 Kuželová zobrazení Obrazy poledníků v normální poloze tvoří trs paprsků (polopřímek) procházejících počátkem souřadnicového systému (kartografickým pólem), obrazy rovnoběžek v normální poloze jsou části soustředných kružnic se středem v počátku souřadnic. V příčné a šikmé poloze jsou obrazy poledníků a rovnoběžek složité křivky (v příčné poloze se nepoužívá, v obecné poloze pro území protáhlá podle vedlejších kružnic, např. ČSR, Japonsko).
119 Kuželová zobrazení Dotykové kružnice se zobrazuje nezkresleně. Výška kužele se volí tak, aby dotyková kružnice zobrazovanou oblast půlila. Zkreslení se zvětšuje na obě strany od dotykové kružnice.
120 (Ptolemaios, 2. století n.l.) Ptolemaiovo zobrazení Zobrazení je délkojevné podél poledníků, délkojevné jsou i dotykové rovnoběžky 0. Zkreslení přibývá rychleji k pólu než k rovníku. Jde o velmi používané zobrazení pro geografické mapy ve školních atlasech.
121 Lambertovo zobrazení (Johan Heinrich Lambert, 1772) Zobrazení je plochojevné, rovnoběžka 0 je délkojevná. Zobrazení má velké úhlové zkreslení, proto se využívá málo. 2 0.cos r.sin : cos n cos 2


122 (Josef Nicholaus de l Isle) Delislovo zobrazení Zobrazení má dvě délkojevné rovnoběžky, nejsou ale sečné. Je délkojevné podél 1,2 a podél poledníků. Plochy a úhly zkresluje méně než Ptolemaiovo zobrazení. r. arc2.sin1 arc 1.sin2 sin sin 2 1 arc sin1 sin2. arc( ) 1 2
..cos r.tg0 tg.")
123 Gaussovo zobrazení (Karl Friedrich Gauss) Zobrazení je úhlojevné, délkojevné podél 0, vzdálenosti mezi rovnoběžkami od 0 narůstají. Používá se v geodézii a v letectví (Mezinárodní letecká mapa a Mezinárodní mapa světa)..cos r.tg0 tg.cot g 2 cos 0
124 Samostatná prezentace Viz samostatná prezentace: KARTOGRAFIE_I_08_ZOBRAZENI_UREDNI Benešovo zobrazení Křovákovo konformní kuželové zobrazení
125 Nepravá zobrazení Zobrazovací plochou nemusí být rovina, plášť válce ani plášť kužele. Síť poledníků a rovnoběžek netvoří ortogonální síť, nelze vytvořit zobrazení konformní. V normální poloze alespoň jedna ze zobrazovacích rovnic obsahuje dvě proměnné, a to a/nebo. Mohou se vyskytovat ve variantách (pseudo)azimutální, (pseudo)cylindrická a (pseudo)konická, z jiného úhlu pohledu pak i jako zobrazení kompozitní (plocha je sice souvislá, ale nastřižená ).
126 Nepravá zobrazení (Pseudo)azimutální - Hammerovo, Aitovo,Werner Stabbovo (srdíčko). (Pseudo)kuželová - Bonneovo (ekvidistantní v rovnoběžkách). (Pseudo)válcová - sinusoidální (Mercator-Sansonovo, Eckertovo sinusoidální, McBrydeovo), eliptická (Mollweidovo, Eckertovo eliptické) aj.
127 Nepravá zobrazení Nepravých válcových zobrazení bylo odvozeno velké množství. Rozlišit je lze např. podle: tvaru obrazu poledníků (zobrazení sinusoidální, eliptická, kružnicová, přímková, ostatní), tvaru obrazu pólu (pól se zobrazuje jako bod nebo jako úsečka), zkreslení (zobrazení ekvivalentní, vyrovnávací; v žádném případě konformní), odlehlosti obrazu rovnoběžek (konstantní, obecná), jména autora, který zobrazení navrhnul.

128 Hammerovo zobrazení (Ernest von Hammer, 1892) Pseudoazimutální zobrazení, vychází z Lambertova zobrazení v příčné poloze. Souřadnice y-průsečíků sítě se ponechají a x- souřadnice se dvojnásobí, obrazy poledníků se přečíslují. y 2. r.sin 1 cos.cos 2 x r.cos.sin 2 1 cos.cos 2
 Pseudoazimutální")
129 Aitovovo zobrazení x r.arccos cos.cos.cos D 2 y 2. r.arccos cos.cos.sin 2 D (David Aitov) Pseudoazimutální zobrazení, vyrovnávací, délkojevný je rovník a střední poledník.

130 Sansonovo zobrazení Pseudocylindrické zobrazení, vychází z Marinova zobrazení. Přímkové obrazy rovnoběžek jsou délkojevné. x r.arc.cos y r.arc
 Pseudocylindrické zobrazení, obrazy rovnoběžek jsou přímkové, kolmé na střední poledník, zhušťují se k pólům, střední poledník je")
131 Mollweidovo zobrazení (Karl B. Mollweide) Pseudocylindrické zobrazení, obrazy rovnoběžek jsou přímkové, kolmé na střední poledník, zhušťují se k pólům, střední poledník je přímkový, ostatní eliptické. Zobrazení je plochojevné a délkojevné podél 0 = ± 45,767. x y r.cos.arc r. 2.sin

132 Eckertovo zobrazení (Max Eckert, 1906) Pseudocylindrické zobrazení, základní poledník a oba póly jsou úsečky o poloviční délce rovníku, poledníky mají sinusoidální průběh. Zobrazení je plochojevné a délkojevné podél 0 = ±49,268. x 0,882. r.arc.cos y 0,882. r.arc 2 2

133 (Rigobert Bonne, 1752) Pseudokonické plochojevné zobrazení vychází z Ptolemaiova zobrazení. Obrazy rovnoběžek a střední poledník jsou délkojevné. Dříve se využívalo pro mapy světadílů. Při 0 = 0 přechází v Sansonovo zobrazení. Bonneovo zobrazení r. tg arc sin tg arc 0 0

134 Nepravá zobrazení (kompozitní) Zobrazení Berghaus Star je ekvidistantní kompozitní modifikované azimutální zobrazení, které zobrazí poledníky jako úsečky, zalomené na rovníku. Rovnoběžky se zobrazí jako koncentrické kruhové oblouky. Kartografickým pólem je severní zeměpisný pól. Póly se zobrazí jako body. Zobrazení je radiálně symetrické podle severního zeměpisného pólu. Zobrazení je ekvidistantní v polednících na severní polokouli a v základních polednících trojúhelníkových listů hvězdy na jižní polokouli.
135 Zobrazení složená 1) Polycylindrická zobrazení (např. Gaussovo-Krügerovo nebo UTM aplikovaná na velké územní celky, resp. celou zeměkouli). 2) Polykonické zobrazení (např. Hasslerovo ekvidistantní zobrazení, kruhová zobrazení Nicolosiho, Van der Grintenovo a Lagrangeovo- Lambertovo). 3) Polyedrická (mnohostěnná) zobrazení. Mnohostěn má povrch skládající se z mnohoúhelníkových stěn, které se setkávají v úsečkami tvořených hranách. Vyjdeme-li z této obecné vlastnosti polyedru (mnohostěnu), pak do této podskupiny není vhodné řadit předcházející dvě podskupiny (ad1) a (ad2) - (u nich nedochází na kontaktu rovnoběžkových vrstev a poledníkových pásů ke skokové úhlové změně při přechodu ze stěny na stěnu nevytvoří se hrana). V praxi se tak velmi často děje.
136 Hasslerovo (americké) zobrazení Základním polykónickým zobrazením ekvidistantním v rovnoběžkách s nezkresleným základním poledníkem a rovníkem, jejichž obrazem je úsečka, je Hasslerovo ekvidistantní zobrazení z roku 1820 (též jednoduché americké polykónické zobrazení). Bylo původně použito pro Mezinárodní mapu světa v měřítku 1 : 1 mil. Je využíváno v USA (topografické mapy pro hydrografické účely), není vhodné pro zobrazení celé Země.
 Obraz rovníku je přímkový a délkojevný, obraz středního poledníku je přímkový a délkojevný, obrazy ostatních rovnoběžek jsou délkojevné kružnice, jejichž středy leží na základním poledníku.")
137 (Ferdinand Rudolph Hassler, 19. století) Obraz rovníku je přímkový a délkojevný, obraz středního poledníku je přímkový a délkojevný, obrazy ostatních rovnoběžek jsou délkojevné kružnice, jejichž středy leží na základním poledníku. Obrazem ostatních rovnoběžek jsou kružnice, jejichž středy leží na základním poledníku. Zobrazení má velké zkreslení při okrajích, proto se používá jen střední část. Hasslerovo (americké) zobrazení r.tg y0 arc
138 Zobrazení složená Typickým polyedrickým zobrazením je Sanson- Flamsteedovo zobrazení použité pro topografické mapy třetího vojenského mapování Rakouska-Uherska. Viz samostatná prezentace: KARTOGRAFIE_I_08_ZOBRAZENI_UREDNI
139 Zobrazení obecná (neklasifikovaná) Zobrazení obecná (též jiná, složitá, resp. neklasifikovaná) jsou taková zobrazení, v nichž obrazy poledníků a rovnoběžek tvoří křivky vyšších stupňů a která nemůžeme jednoznačně zařadit do některých z předešlých skupin. Vznik zobrazení není geometricky představitelný a odvození zobrazovacích rovnic je provedeno čistě matematickou cestou (každá rovinná souřadnice je funkcí obou souřadnic na referenční ploše). X = f U, V ; Y = g U, V Zeměpisné poledníky a rovnoběžky se zobrazují jako křivky různých tvarů, které obecně nejsou vzájemně ortogonální. Většina těchto zobrazení je vyrovnávacích, ale může se jednat i o zobrazení konformní.
")
,")
140 Zobrazení obecná (neklasifikovaná) Adamsovo konformní zobrazení (vlevo), Armadillovo zobrazení (vpravo)
141 Volba zobrazení Velikost území - s narůstající velikostí území se zvětšuje zkreslení v okrajových částech jednoduchá zobrazení (azimutální nebo kuželová). Pro mapy Země - nepravá nebo mnohokuželová zobrazení. Tvar území - malé hodnoty zkreslení co nejblíže k dotykovým nebo sečným křivkám: okrouhlá území - azimutální zobrazení, protáhlá území - kuželová nebo válcová zobrazení.
142 Literatura a vybrané použité zdroje: Buchar P., Hojovec V.: Matematická kartografie, ČVUT Praha Böhm J.: Matematická kartografie I, II. Hojovec V.: Kartografie Srnka E.: Matematická kartografie Vykutil J. : Vyšší geodézie Snyder J. P., Bugayevskiy L. M.: Map projections.taylor & Francis Internetové zdroje: WinKart: Proj4: GMT (Linux):
PŘEHLED JEVNOSTI ZOBRAZENÍ
 Úhlojevná (konformní Plochojevná (ekvivalentní Délkojevná (ekvidistatntí Vyrovnávací (kompenzační PŘEHLED JEVNOSTI ZOBRAZENÍ (azimutální Stereografická (cylindické Mercatorovo zobrazení (loodroma jako
Úhlojevná (konformní Plochojevná (ekvivalentní Délkojevná (ekvidistatntí Vyrovnávací (kompenzační PŘEHLED JEVNOSTI ZOBRAZENÍ (azimutální Stereografická (cylindické Mercatorovo zobrazení (loodroma jako
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice
 Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice Kartografie přednáška 5 Referenční plochy souřadnicových soustav slouží k lokalizaci bodů, objektů
Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice Kartografie přednáška 5 Referenční plochy souřadnicových soustav slouží k lokalizaci bodů, objektů
Geodézie a pozemková evidence
 2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.2 - Kartografická zobrazení, souřadnicové soustavy Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.2 - Kartografická zobrazení, souřadnicové soustavy Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské
Matematické metody v kartografii. Volba a identifikace zobrazení. Zobrazení použitá v ČR. Kritéria pro hodnocení kartografických zobrazení(13)
") Matematické metody v kartografii Volba a identifikace zobrazení. Zobrazení použitá v ČR. Kritéria pro hodnocení kartografických zobrazení(3) Volba kartografického zobrazení Parametry ovlivňující volbu
Matematické metody v kartografii Volba a identifikace zobrazení. Zobrazení použitá v ČR. Kritéria pro hodnocení kartografických zobrazení(3) Volba kartografického zobrazení Parametry ovlivňující volbu
Zobrazení. Geografická kartografie Přednáška 4
 Zobrazení Geografická kartografie Přednáška 4 kartografické zobrazení způsob, který každému bodu na referenční ploše přiřazuje právě jeden bod na zobrazovací ploše (výjimkou jsou ovšem singulární body)
Zobrazení Geografická kartografie Přednáška 4 kartografické zobrazení způsob, který každému bodu na referenční ploše přiřazuje právě jeden bod na zobrazovací ploše (výjimkou jsou ovšem singulární body)
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 6 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografická zobrazení použitá na našem území důležitá jsou zejména zobrazení pro státní mapová díla v
Kartografie 1 - přednáška 6 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografická zobrazení použitá na našem území důležitá jsou zejména zobrazení pro státní mapová díla v
Matematická kartografie. Černý J., Kočandrlová M.: Konstruktivní geometrie, ČVUT. Referenční plochy
 Matematická kartografie Buchar.: Matematická kartografie 10, ČVUT; Černý J., Kočandrlová M.: Konstruktivní geometrie, ČVUT Referenční plochy referenční elipsoid (sféroid) zploštělý rotační elipsoid Besselův
Matematická kartografie Buchar.: Matematická kartografie 10, ČVUT; Černý J., Kočandrlová M.: Konstruktivní geometrie, ČVUT Referenční plochy referenční elipsoid (sféroid) zploštělý rotační elipsoid Besselův
Základy kartografie. RNDr. Petra Surynková, Ph.D.
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta RNDr., Ph.D. petra.surynkova@mff.cuni.cz www.surynkova.info Kartografie Vědní obor zabývající se znázorněním zemského povrchu a nebeských těles
Univerzita Karlova v Praze Matematicko-fyzikální fakulta RNDr., Ph.D. petra.surynkova@mff.cuni.cz www.surynkova.info Kartografie Vědní obor zabývající se znázorněním zemského povrchu a nebeských těles
4. Matematická kartografie
 4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
Matematické metody v kartografii. Jednoduchá azimutální zobrazení. Azimutální projekce. UPS. (10.)
") Matematické metody v kartografii Jednoduchá azimutální zobrazení. Azimutální projekce. UPS. (10.) 1. Jednoduchá azimutální zobrazení Společné vlastnosti: Jednoduché zobrazení, zobrazuje na tečnou rovinu
Matematické metody v kartografii Jednoduchá azimutální zobrazení. Azimutální projekce. UPS. (10.) 1. Jednoduchá azimutální zobrazení Společné vlastnosti: Jednoduché zobrazení, zobrazuje na tečnou rovinu
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 9 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Polykónická zobrazení někdy také mnohokuželová zobecnění kuželových zobrazení použito je nekonečně mnoho
Kartografie 1 - přednáška 9 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Polykónická zobrazení někdy také mnohokuželová zobecnění kuželových zobrazení použito je nekonečně mnoho
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 5 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Válcová zobrazení obrazem poledníků jsou úsečky, které mají konstantní rozestupy obrazem rovnoběžek jsou
Kartografie 1 - přednáška 5 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Válcová zobrazení obrazem poledníků jsou úsečky, které mají konstantní rozestupy obrazem rovnoběžek jsou
Matematické metody v kartografii. Kruhová zobrazení. Polyedrická a neklasifikovaná zobrazení (12)
") Matematické metody v kartografii Kruhová zobrazení. Polyedrická a neklasifikovaná zobrazení (12) Kruhová zobrazení Společné vlastnosti: Síť poledníků/rovnoběžek tvořena pouze kruhovými oblouky Středy rovnoběžkových
Matematické metody v kartografii Kruhová zobrazení. Polyedrická a neklasifikovaná zobrazení (12) Kruhová zobrazení Společné vlastnosti: Síť poledníků/rovnoběžek tvořena pouze kruhovými oblouky Středy rovnoběžkových
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 8 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Nepravá zobrazení zachovávají některé charakteristiky jednoduchých zobrazení (tvar rovnoběžek) některé
Kartografie 1 - přednáška 8 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Nepravá zobrazení zachovávají některé charakteristiky jednoduchých zobrazení (tvar rovnoběžek) některé
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ. JS pro 3. ročník S3G
 SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 3. ročník S3G ROZPIS TÉMAT PRO ŠK. ROK 2018/2019 1) Kartografické zobrazení na území ČR Cassiny-Soldnerovo zobrazení Obecné konformní kuželové zobrazení Gauss-Krügerovo
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 3. ročník S3G ROZPIS TÉMAT PRO ŠK. ROK 2018/2019 1) Kartografické zobrazení na území ČR Cassiny-Soldnerovo zobrazení Obecné konformní kuželové zobrazení Gauss-Krügerovo
Matematické metody v kartografii. Členění kartografických zobrazení. Zobrazení z elipsoidu na kouli (5.)
") Matematické metody v kartografii Členění kartografických zobrazení. Zobrazení z elipsoidu na kouli (5.) 1. Členění kartografických zobrazení: Existuje velkémnožstvíkarografických zobrazení. Lze je členit
Matematické metody v kartografii Členění kartografických zobrazení. Zobrazení z elipsoidu na kouli (5.) 1. Členění kartografických zobrazení: Existuje velkémnožstvíkarografických zobrazení. Lze je členit
Geodézie pro architekty. Úvod do geodézie
 Geodézie pro architekty Úvod do geodézie Geodézie pro architekty Ing. Tomáš Křemen, Ph.D. B905 http://k154.fsv.cvut.cz/~kremen/ tomas.kremen@fsv.cvut.cz Doporučená literatura: Hánek, P. a kol.: Stavební
Geodézie pro architekty Úvod do geodézie Geodézie pro architekty Ing. Tomáš Křemen, Ph.D. B905 http://k154.fsv.cvut.cz/~kremen/ tomas.kremen@fsv.cvut.cz Doporučená literatura: Hánek, P. a kol.: Stavební
GIS Geografické informační systémy
 GIS Geografické informační systémy Kartografie Glóbus představuje zmenšený a zjednodušený, 3rozměrný model zemského povrchu; všechny délky na glóbu jsou zmenšeny v určitém poměru; úhly a tvary a velikosti
GIS Geografické informační systémy Kartografie Glóbus představuje zmenšený a zjednodušený, 3rozměrný model zemského povrchu; všechny délky na glóbu jsou zmenšeny v určitém poměru; úhly a tvary a velikosti
Matematické metody v kartografii. Jednoduchá válcová zobrazení. Válcové projekce. Gaussovo zobrazení. (6.+7.)
") Matematické metody v kartografii Jednoduchá válcová zobrazení. Válcové projekce. Gaussovo zobrazení. (6.+7.) 1. Jednoduchá zobrazení Společné vlastnosti: Zobrazovací plocha představována pláštěm kužele,
Matematické metody v kartografii Jednoduchá válcová zobrazení. Válcové projekce. Gaussovo zobrazení. (6.+7.) 1. Jednoduchá zobrazení Společné vlastnosti: Zobrazovací plocha představována pláštěm kužele,
MAPOVÁNÍ. Všeobecné základy map JS pro 2. ročník S2G 1. ročník G1Z
 MAPOVÁNÍ Všeobecné základy map JS pro 2. ročník S2G 1. ročník G1Z Všeobecné základy MAP Mapování řeší problém znázornění nepravidelného zemského povrchu do roviny Vychází se z: 1) geometrických základů
MAPOVÁNÍ Všeobecné základy map JS pro 2. ročník S2G 1. ročník G1Z Všeobecné základy MAP Mapování řeší problém znázornění nepravidelného zemského povrchu do roviny Vychází se z: 1) geometrických základů
Geodézie Přednáška. Souřadnicové systémy Souřadnice na referenčních plochách
 Geodézie Přednáška Souřadnicové systémy Souřadnice na referenčních plochách strana 2 každý stát nebo skupina států si volí pro souvislé zobrazení celého území vhodný souřadnicový systém slouží k lokalizaci
Geodézie Přednáška Souřadnicové systémy Souřadnice na referenčních plochách strana 2 každý stát nebo skupina států si volí pro souvislé zobrazení celého území vhodný souřadnicový systém slouží k lokalizaci
Matematické metody v kartografii. Nepravá zobrazení. Polykónická zobrazení. (11.)
") Matematické metody v kartografii Nepravá zobrazení. Polykónická zobrazení. (11.) 1. Společné vlastnosti nepravých zobrazení Jedna ze souřadnicových funkcí je funkcí zeměpisné šířky i délky Obrazy rovnoběţek:
Matematické metody v kartografii Nepravá zobrazení. Polykónická zobrazení. (11.) 1. Společné vlastnosti nepravých zobrazení Jedna ze souřadnicových funkcí je funkcí zeměpisné šířky i délky Obrazy rovnoběţek:
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Pro mapování na našem území bylo použito následujících souřadnicových systémů:
 SOUŘADNICOVÉ SYSTÉMY Pro mapování na našem území bylo použito následujících souřadnicových systémů: 1. SOUŘADNICOVÉ SYSTÉMY STABILNÍHO KATASTRU V první polovině 19. století bylo na našem území mapováno
SOUŘADNICOVÉ SYSTÉMY Pro mapování na našem území bylo použito následujících souřadnicových systémů: 1. SOUŘADNICOVÉ SYSTÉMY STABILNÍHO KATASTRU V první polovině 19. století bylo na našem území mapováno
Základy kartografie, topografické plochy
 Základy kartografie, topografické plochy morava@karlin.mff.cuni.cz Katedra didaktiky matematiky MFF UK, Praha Aplikace matematiky pro učitele, 3. ledna 2012 Základní pojmy Kartografie věda zabývající se
Základy kartografie, topografické plochy morava@karlin.mff.cuni.cz Katedra didaktiky matematiky MFF UK, Praha Aplikace matematiky pro učitele, 3. ledna 2012 Základní pojmy Kartografie věda zabývající se
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
Transformace dat mezi různými datovými zdroji
 Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ. JS pro 2. ročník S2G 1. ročník G1Z
 SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 2. ročník S2G 1. ročník G1Z Všeobecné základy MAP Mapování řeší problém znázornění nepravidelného zemského povrchu do roviny Vychází se z: 1) geometrických
SPŠ STAVEBNÍ České Budějovice MAPOVÁNÍ JS pro 2. ročník S2G 1. ročník G1Z Všeobecné základy MAP Mapování řeší problém znázornění nepravidelného zemského povrchu do roviny Vychází se z: 1) geometrických
GIS a pozemkové úpravy. Data pro využití území (DPZ)
") GIS a pozemkové úpravy Data pro využití území (DPZ) Josef Krása Katedra hydromeliorací a krajinného inženýrství, Fakulta stavební ČVUT v Praze 1 Papírová mapa Nevymizela v době GIS systémů (Stále základní
GIS a pozemkové úpravy Data pro využití území (DPZ) Josef Krása Katedra hydromeliorací a krajinného inženýrství, Fakulta stavební ČVUT v Praze 1 Papírová mapa Nevymizela v době GIS systémů (Stále základní
Stavební geodézie. Úvod do geodézie. Ing. Tomáš Křemen, Ph.D.
 Stavební geodézie Úvod do geodézie Ing. Tomáš Křemen, Ph.D. Stavební geodézie SG01 Ing. Tomáš Křemen, Ph.D. B905 http://k154.fsv.cvut.cz/~kremen/ tomas.kremen@fsv.cvut.cz Doporučená literatura: Hánek,
Stavební geodézie Úvod do geodézie Ing. Tomáš Křemen, Ph.D. Stavební geodézie SG01 Ing. Tomáš Křemen, Ph.D. B905 http://k154.fsv.cvut.cz/~kremen/ tomas.kremen@fsv.cvut.cz Doporučená literatura: Hánek,
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
1 Nepravá zobrazení. 4 Zobrazení odvozené z jednoduchých azimutálních (modifikované. Obsah. 3 Nepravá azimutální zobrazení.
 Obsah 1 Nepravá zobrazení 2 3 4 Zobrazení odvozené z jednoduchých azimutálních (modifikované zobrazení) 5 Zobrazení Evropy Nepravá zobrazení: jednoduché nepravé kuželové ρ = f (U), ɛ = g(v ) = nv ρ = f
Obsah 1 Nepravá zobrazení 2 3 4 Zobrazení odvozené z jednoduchých azimutálních (modifikované zobrazení) 5 Zobrazení Evropy Nepravá zobrazení: jednoduché nepravé kuželové ρ = f (U), ɛ = g(v ) = nv ρ = f
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY
 GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
GEOGRAFICKÁ SLUŽBA ARMÁDY ČESKÉ REPUBLIKY VOJENSKÝ GEOGRAFICKÝ A HYDROMETEOROLOGICKÝ ÚŘAD Popis a zásady používání světového geodetického referenčního systému 1984 v AČR POPIS A ZÁSADY POUŽÍVÁNÍ V AČR
Úvod do předmětu geodézie
 1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
Celkem existuje asi 300 zobrazení, používá se jen několik desítek.
 ÁKLADY KARTOGRAFIE RO SŠ KARTOGRAFICKÉ OBRAENÍ Kartografické zobrazení je způsob, který každému bodu na referenčním elipsoidu resp. referenční kouli přiřazuje body v rovině. Určení věrných obrazů bodů
ÁKLADY KARTOGRAFIE RO SŠ KARTOGRAFICKÉ OBRAENÍ Kartografické zobrazení je způsob, který každému bodu na referenčním elipsoidu resp. referenční kouli přiřazuje body v rovině. Určení věrných obrazů bodů
Úvodní ustanovení. Geodetické referenční systémy
 430/2006 Sb. NAŘÍZENÍ VLÁDY ze dne 16. srpna 2006 o stanovení geodetických referenčních systémů a státních mapových děl závazných na území státu a zásadách jejich používání ve znění nařízení vlády č. 81/2011
430/2006 Sb. NAŘÍZENÍ VLÁDY ze dne 16. srpna 2006 o stanovení geodetických referenčních systémů a státních mapových děl závazných na území státu a zásadách jejich používání ve znění nařízení vlády č. 81/2011
Souřadnicové systémy Souřadnice na referenčních plochách
 Geodézie přednáška 2 Souřadnicové systémy Souřadnice na referenčních plochách Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 Souřadnicové systémy na území
Geodézie přednáška 2 Souřadnicové systémy Souřadnice na referenčních plochách Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 Souřadnicové systémy na území
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Kartografické projekce
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Kartografické projekce Vypracoval: Jiří Novotný Třída: 4.C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Kartografické projekce Vypracoval: Jiří Novotný Třída: 4.C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Srovnání konformních kartografických zobrazení pro zvolené
 Srovnání konformních kartografických zobrazení pro zvolené území (návod na cvičení) 1 Úvod Cílem úlohy je srovnání vlastnosti jednoduchých konformních zobrazení a jejich posouzení z hlediska vhodnosti
Srovnání konformních kartografických zobrazení pro zvolené území (návod na cvičení) 1 Úvod Cílem úlohy je srovnání vlastnosti jednoduchých konformních zobrazení a jejich posouzení z hlediska vhodnosti
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. PRAVOÚHLÉ SOUŘADNICE V ČR ZOBRAZOVÁNÍ POLOHY BODŮ (SOUSTAVY) Soustavu souřadnic lze označit jako vzájemně jednoznačné
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. PRAVOÚHLÉ SOUŘADNICE V ČR ZOBRAZOVÁNÍ POLOHY BODŮ (SOUSTAVY) Soustavu souřadnic lze označit jako vzájemně jednoznačné
REKONSTRUKCE ASTROLÁBU POMOCÍ STEREOGRAFICKÉ PROJEKCE
 REKONTRUKCE ATROLÁBU POMOCÍ TEREOGRAFICKÉ PROJEKCE Václav Jára 1 1 tereografická projekce a její vlastnosti tereografická projekce kulové plochy je středové promítání z bodu této kulové plochy do tečné
REKONTRUKCE ATROLÁBU POMOCÍ TEREOGRAFICKÉ PROJEKCE Václav Jára 1 1 tereografická projekce a její vlastnosti tereografická projekce kulové plochy je středové promítání z bodu této kulové plochy do tečné
154GUI1 Geodézie pro UIS 1
 154GUI1 Geodézie pro UIS 1 Přednášející: Ing. Tomáš Křemen, Ph.D; Místnost: B905 Email: tomas.kremen@fsv.cvut.cz WWW: k154.fsv.cvut.cz/~kremen Literatura: [1] Ratiborský, J.: Geodézie 10. 2. vyd. Praha:
154GUI1 Geodézie pro UIS 1 Přednášející: Ing. Tomáš Křemen, Ph.D; Místnost: B905 Email: tomas.kremen@fsv.cvut.cz WWW: k154.fsv.cvut.cz/~kremen Literatura: [1] Ratiborský, J.: Geodézie 10. 2. vyd. Praha:
OBSAH 1 Úvod Fyzikální charakteristiky Zem Referen ní plochy a soustavy... 21
 OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
OBSAH I. ČÁST ZEMĚ A GEODÉZIE 1 Úvod... 1 1.1 Historie měření velikosti a tvaru Země... 1 1.1.1 První určení poloměru Zeměkoule... 1 1.1.2 Středověké měření Země... 1 1.1.3 Nové názory na tvar Země...
GA06 Deskriptivní geometrie pro obor Geodézie a kartografie Úvod do kartografie.
 GA06 Deskriptivní geometrie pro obor Geodézie a kartografie Úvod do kartografie. Květoslava Prudilová Jan Šafařík přednášková skupina P-G1G1, učebna C311 zimní semestr 2018-2019 21. listopad 2018 Základní
GA06 Deskriptivní geometrie pro obor Geodézie a kartografie Úvod do kartografie. Květoslava Prudilová Jan Šafařík přednášková skupina P-G1G1, učebna C311 zimní semestr 2018-2019 21. listopad 2018 Základní
GIS Geografické informační systémy. Daniela Ďuráková, Jan Gaura Katedra informatiky, FEI
 GIS Geografické informační systémy Daniela Ďuráková, Jan Gaura Katedra informatiky, FEI jan.gaura@vsb.cz http://mrl.cs.vsb.cz/people/gaura Kartografie Stojí na pomezí geografie a geodezie. Poskytuje vizualizaci
GIS Geografické informační systémy Daniela Ďuráková, Jan Gaura Katedra informatiky, FEI jan.gaura@vsb.cz http://mrl.cs.vsb.cz/people/gaura Kartografie Stojí na pomezí geografie a geodezie. Poskytuje vizualizaci
SOUŘADNICOVÉ SYSTÉMY. SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 3.ročník
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 3.ročník SOUŘADNICOVÉ SYSTÉMY GEOID, REFERENČNÍ ELIPSOID, REFERENČNÍ KOULE S JTSK S - 42 WGS 84 TRANSFORMACE SUŘADNICOVÝCH SYSTÉMŮ REFERENČNÍ SYSTÉMY
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 3.ročník SOUŘADNICOVÉ SYSTÉMY GEOID, REFERENČNÍ ELIPSOID, REFERENČNÍ KOULE S JTSK S - 42 WGS 84 TRANSFORMACE SUŘADNICOVÝCH SYSTÉMŮ REFERENČNÍ SYSTÉMY
Podpořeno z projektu FRVŠ 584/2011.
 Podpořeno z projektu FRVŠ 584/2011. Obsah Křovákovo zobrazení 1 Křovákovo zobrazení Obsah Křovákovo zobrazení 1 Křovákovo zobrazení Podpořeno z projektu FRVŠ 584/2011. Křovákovo zobrazení Křovákovo zobrazení
Podpořeno z projektu FRVŠ 584/2011. Obsah Křovákovo zobrazení 1 Křovákovo zobrazení Obsah Křovákovo zobrazení 1 Křovákovo zobrazení Podpořeno z projektu FRVŠ 584/2011. Křovákovo zobrazení Křovákovo zobrazení
Geoinformatika. IV Poloha v prostoru
 Geoinformatika IV Poloha v prostoru jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Složky geografických
Geoinformatika IV Poloha v prostoru jaro 2017 Petr Kubíček kubicek@geogr.muni.cz Laboratory on Geoinformatics and Cartography (LGC) Institute of Geography Masaryk University Czech Republic Složky geografických
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY
 APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
Zobrazování zemského povrchu
 Zobrazování zemského povrchu Země je kulatá Mapy jsou placaté Zemský povrch je zvlněný a země není kulatá Fyzický povrch potřebuji promítnout na nějaký matematicky popsatelný povrch http://photojournal.jpl.nasa.gov/jpeg/pia03399.jpg
Zobrazování zemského povrchu Země je kulatá Mapy jsou placaté Zemský povrch je zvlněný a země není kulatá Fyzický povrch potřebuji promítnout na nějaký matematicky popsatelný povrch http://photojournal.jpl.nasa.gov/jpeg/pia03399.jpg
Sférická trigonometrie v matematické geografii a astronomii
 Sférická trigonometrie v matematické geografii a astronomii Mgr. Hana Lakomá, Ph.D., Mgr. Veronika Douchová 00 Tento učební materiál vznikl v rámci grantu FRVŠ F1 066. 1 Základní pojmy sférické trigonometrie
Sférická trigonometrie v matematické geografii a astronomii Mgr. Hana Lakomá, Ph.D., Mgr. Veronika Douchová 00 Tento učební materiál vznikl v rámci grantu FRVŠ F1 066. 1 Základní pojmy sférické trigonometrie
MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM
 WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
WORLD GEODETIC SYSTEM 1984 - WGS 84 MODERNÍ GLOBÁLNÍ GEODETICKÝ REFERENČNÍ GEOCENTRICKÝ SYSTÉM Pro projekt CTU 0513011 (2005) s laskavou pomocí Ing. D. Dušátka, CSc. Soustava základních geometrických a
KARTOGRAFIE. Rovinné projekce. Gnómické projekce. 1. Pólová gnómonická projekce
 KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kartografické projekce
 GYMNÁZIUM CHRISTIANA DOPPLERA Zborovská 45, Praha 5 Ročníková práce z deskriptivní geometrie Kartografické projekce Vypracoval: Nguyen, Viet Bach, 4.C Školní rok: 2011/2012 Zadavatel: Mgr. Ondřej Machů
GYMNÁZIUM CHRISTIANA DOPPLERA Zborovská 45, Praha 5 Ročníková práce z deskriptivní geometrie Kartografické projekce Vypracoval: Nguyen, Viet Bach, 4.C Školní rok: 2011/2012 Zadavatel: Mgr. Ondřej Machů
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL 5 NEPRAVÁ ZOBRAZENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie Modul
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL 5 NEPRAVÁ ZOBRAZENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie Modul
Gymnázium Jiřího Ortena, Kutná Hora. Průřezová témata Poznámky. Téma Školní výstupy Učivo (pojmy) volné rovnoběžné promítání průmětna
 volné rovnoběžné promítání průmětna") Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
Předmět: Matematika Náplň: Stereometrie, Analytická geometrie Třída: 3. ročník a septima Počet hodin: 4 hodiny týdně Pomůcky: PC a dataprojektor, učebnice Stereometrie Volné rovnoběžné promítání Zobrazí
K154SG01 Stavební geodézie
 K154SG01 Stavební geodézie Přednášející: Doc. Ing. Martin Štroner, Ph.D; Místnost: B912 Email: martin.stroner@fsv.cvut.cz Literatura: [1] Hánek, P. a kol.: Stavební geodézie. Česká technika -nakladatelství
K154SG01 Stavební geodézie Přednášející: Doc. Ing. Martin Štroner, Ph.D; Místnost: B912 Email: martin.stroner@fsv.cvut.cz Literatura: [1] Hánek, P. a kol.: Stavební geodézie. Česká technika -nakladatelství
Kartografie - úvod, historie a rozdělení Matematická kartografie Kartografická zobrazení
 Kartografie - úvod, historie a rozdělení Matematická kartografie Kartografická zobrazení Kartografie přednáška 1 Kartografie obor zabývající se zobrazováním zakřivené části Zemského povrchu do rovinné
Kartografie - úvod, historie a rozdělení Matematická kartografie Kartografická zobrazení Kartografie přednáška 1 Kartografie obor zabývající se zobrazováním zakřivené části Zemského povrchu do rovinné
Matematické metody v kartografii. Přednáška 3. Důležité křivky na kouli a elipsoidu. Loxodroma a ortodroma.
 Matematické metody v kartografii Přednáška 3. Důležité křivky na kouli a elipsoidu. Loxodroma a ortodroma. . Přehled důležitých křivek V matematické kartografii existují důležité křivky, které jdou po
Matematické metody v kartografii Přednáška 3. Důležité křivky na kouli a elipsoidu. Loxodroma a ortodroma. . Přehled důležitých křivek V matematické kartografii existují důležité křivky, které jdou po
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. PRAVOÚHLÉ SOUŘADNICE V ČR ZOBRAZOVÁNÍ POLOHY BODŮ (SOUSTAVY) Soustavu souřadnic lze označit jako vzájemně jednoznačné
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. PRAVOÚHLÉ SOUŘADNICE V ČR ZOBRAZOVÁNÍ POLOHY BODŮ (SOUSTAVY) Soustavu souřadnic lze označit jako vzájemně jednoznačné
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KATOGAFIE MODUL 3 KATOGAFICKÉ ZOBAZENÍ STUDIJNÍ OPOY PO STUDIJNÍ POGAMY S KOMBINOVANOU FOMOU STUDIA Matematická kartografie Modul 3
VYSOKÉ UENÍ TECHNICKÉ V BN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KATOGAFIE MODUL 3 KATOGAFICKÉ ZOBAZENÍ STUDIJNÍ OPOY PO STUDIJNÍ POGAMY S KOMBINOVANOU FOMOU STUDIA Matematická kartografie Modul 3
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL KARTOGRAFICKÁ ZKRESLENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL KARTOGRAFICKÁ ZKRESLENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Sandra PÁNKOVÁ ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ BAKALÁŘSKÁ PRÁCE PRAHA 2014 Sandra PÁNKOVÁ ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ STUDIJNÍ PROGRAM GEODÉZIE A KARTOGRAFIE STUDIJNÍ OBOR
Analytická geometrie přímky, roviny (opakování středoškolské látky) = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,
 = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,") Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Jednoduchá zobrazení. Podpořeno z projektu FRVŠ 584/2011.
 Podpořeno z projektu FRVŠ 584/2011. Obsah Jednoduchá zobrazení 1 Jednoduchá zobrazení 2 Obsah Jednoduchá zobrazení 1 Jednoduchá zobrazení 2 Společné vlastnosti jednoduchých zobrazení: Zobrazovací ref.
Podpořeno z projektu FRVŠ 584/2011. Obsah Jednoduchá zobrazení 1 Jednoduchá zobrazení 2 Obsah Jednoduchá zobrazení 1 Jednoduchá zobrazení 2 Společné vlastnosti jednoduchých zobrazení: Zobrazovací ref.
Matematické metody v kartografii
 Mtemtické metody v krtogrfii. Přednášk Referenční elipsoid zákldní vzthy. Poloměry křivosti. Délky poledníkového rovnoběžkového oblouku. 1. Zákldní vzthy n rotčním elipoidu Rotční elipsoid dán následujícími
Mtemtické metody v krtogrfii. Přednášk Referenční elipsoid zákldní vzthy. Poloměry křivosti. Délky poledníkového rovnoběžkového oblouku. 1. Zákldní vzthy n rotčním elipoidu Rotční elipsoid dán následujícími
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Aplikace deskriptivní geometrie
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Rozšíření akreditace učitelství matematiky a učitelství deskriptivní geometrie na PřF UP v Olomouci o formu kombinovanou CZ.1.07/2.2.00/18.0013 Aplikace deskriptivní geometrie
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Rozšíření akreditace učitelství matematiky a učitelství deskriptivní geometrie na PřF UP v Olomouci o formu kombinovanou CZ.1.07/2.2.00/18.0013 Aplikace deskriptivní geometrie
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Obr. 4 Změna deklinace a vzdálenosti Země od Slunce v průběhu roku
 4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
Trojúhelníky. a jejich různé středy. Součet vnitřních úhlů trojúhelníku = 180 neboli π radiánů.
 Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Téma: Geografické a kartografické základy map
 Topografická příprava Téma: Geografické a kartografické základy map Osnova : 1. Topografické mapy, měřítko mapy 2. Mapové značky 3. Souřadnicové systémy 2 3 1. Topografické mapy, měřítko mapy Topografická
Topografická příprava Téma: Geografické a kartografické základy map Osnova : 1. Topografické mapy, měřítko mapy 2. Mapové značky 3. Souřadnicové systémy 2 3 1. Topografické mapy, měřítko mapy Topografická
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK
 FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
Teorie sférické trigonometrie
 Teorie sférické trigonometrie Trigonometrie (z řeckého trigónon = trojúhelník a metrein= měřit) je oblast goniometrie zabývající se praktickým užitím goniometrických funkcí při řešení úloh o trojúhelnících.
Teorie sférické trigonometrie Trigonometrie (z řeckého trigónon = trojúhelník a metrein= měřit) je oblast goniometrie zabývající se praktickým užitím goniometrických funkcí při řešení úloh o trojúhelnících.
Souřadnicov. Cassini Soldnerovo zobrazení. Cassini-Soldnerovo. b) Evropský terestrický referenční systém m (ETRS), adnicové systémy
 Evropský terestrický referenční systém m (ETRS), adnicové systémy") Závazné referenční systémy dle 430/2006 Sb. Souřadnicov adnicové systémy na území Nařízen zení vlády o stanovení geodetických referenčních systémů a státn tních mapových děl d l závazných z na území státu
Závazné referenční systémy dle 430/2006 Sb. Souřadnicov adnicové systémy na území Nařízen zení vlády o stanovení geodetických referenčních systémů a státn tních mapových děl d l závazných z na území státu
Definice Tečna paraboly je přímka, která má s parabolou jediný společný bod,
 5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 4.ročník SOUŘADNICOVÉ SOUSTAVY VE FOTOGRAMMETRII SOUŘADNICOVÉ SOUSTAVY VE FTM hlavní souřadnicové soustavy systém snímkových souřadnic systém modelových
Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace
 Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace Zeměměřický úřad, Jan Řezníček Praha, 2018 Definice matematická pravidla (rovnice) jednoznačné přidružení souřadnic k prostorovým informacím
Souřadnicové systémy v geodatech resortu ČÚZK a jejich transformace Zeměměřický úřad, Jan Řezníček Praha, 2018 Definice matematická pravidla (rovnice) jednoznačné přidružení souřadnic k prostorovým informacím
Zeměpisné souřadnice Zeměpisná šířka rovnoběžce poledníky Zeměpisná délka
 Zeměpisné souřadnice Pro určení polohy na zemském povrchu používáme souřadnicovou soustavu. Počátek souřadnic leží ve středu Země S. Rovina proložená středem Země kolmo na osu otáčení je rovina rovníku
Zeměpisné souřadnice Pro určení polohy na zemském povrchu používáme souřadnicovou soustavu. Počátek souřadnic leží ve středu Země S. Rovina proložená středem Země kolmo na osu otáčení je rovina rovníku
SPŠSTAVEBNÍČeskéBudějovice MAPOVÁNÍ. Gauss-Krügerovo zobrazení UTM
 SPŠSTAVEBNÍČeskéBudějovice MAPOVÁNÍ Gauss-Krügerovo zobrazení UTM 1 Předmluva Mapování v novém Křovákově kuželovém konformním zobrazení mělo dobrou přesnost a značné výhody, ale ty měly využití jen lokální
SPŠSTAVEBNÍČeskéBudějovice MAPOVÁNÍ Gauss-Krügerovo zobrazení UTM 1 Předmluva Mapování v novém Křovákově kuželovém konformním zobrazení mělo dobrou přesnost a značné výhody, ale ty měly využití jen lokální
Další plochy technické praxe
 Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura:
 8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
Geodézie a pozemková evidence
 2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.1 - Úvod do geodézie a kartografie Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU
2012, Brno Ing.Tomáš Mikita, Ph.D. Geodézie a pozemková evidence Přednáška č.1 - Úvod do geodézie a kartografie Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU
Šroubovice... 5 Šroubové plochy Stanovte paprsek tak, aby procházel bodem A a po odrazu na rovině ρ procházel bodem
 Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
KONFORMITA GAUSS-KRÜGEROVA ZOBRAZENÍ Radek Hampl Stručný pohled do historie vzniku Gauss-Krügerova zobrazení
 KONFORMITA GAUSS-KRÜGEROVA ZOBRAZENÍ Radek Hampl 1 Abstrakt: Příspěvek se týká problematiky konormity Gauss-Krügerova zobrazení. Ukazuje se, že toto zobrazení není ve své reálné podobě konormní a lépe
KONFORMITA GAUSS-KRÜGEROVA ZOBRAZENÍ Radek Hampl 1 Abstrakt: Příspěvek se týká problematiky konormity Gauss-Krügerova zobrazení. Ukazuje se, že toto zobrazení není ve své reálné podobě konormní a lépe
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Topografické plochy KG - L MENDELU. KG - L (MENDELU) Topografické plochy 1 / 56
 Topografické plochy 1 / 56") Topografické plochy KG - L MENDELU KG - L (MENDELU) Topografické plochy 1 / 56 Obsah 1 Úvod 2 Křivky a body na topografické ploše 3 Řez topografické plochy rovinou 4 Příčný a podélný profil KG - L (MENDELU)
Topografické plochy KG - L MENDELU KG - L (MENDELU) Topografické plochy 1 / 56 Obsah 1 Úvod 2 Křivky a body na topografické ploše 3 Řez topografické plochy rovinou 4 Příčný a podélný profil KG - L (MENDELU)
Základní topologické pojmy:
 Křivky Marie Ennemond Camille Jordan (88 9): Křivka je množina bodů, která je surjektivním obrazem nějakého intervalu Giuseppe Peano (858 9): Zobrazení intervalu na čtverec Wacław Franciszek Sierpiński
Křivky Marie Ennemond Camille Jordan (88 9): Křivka je množina bodů, která je surjektivním obrazem nějakého intervalu Giuseppe Peano (858 9): Zobrazení intervalu na čtverec Wacław Franciszek Sierpiński
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI
 KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
MAPY VELKÉHO A STŘEDNÍHO MĚŘÍTKA
 MAPA A GLÓBUS Tento nadpis bude stejně velký jako nadpis Planeta Země. Můžeš ho napsat přes půl nebo klidně i přes celou stranu. GLÓBUS Glóbus - zmenšený model Země - nezkresluje tvary pevnin a oceánů
MAPA A GLÓBUS Tento nadpis bude stejně velký jako nadpis Planeta Země. Můžeš ho napsat přes půl nebo klidně i přes celou stranu. GLÓBUS Glóbus - zmenšený model Země - nezkresluje tvary pevnin a oceánů
1. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v
 Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v") . a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
GEODÉZIE. Co je vlastně geodézie?
 Co je vlastně geodézie? Doslovný význam řeckého slova GEODESIE je dělení půdy, země. Geodesie se zabývá měřením, výpočtem a zobrazením částí povrchu zemského, určením tvaru a velikosti země. Základní úlohou
Co je vlastně geodézie? Doslovný význam řeckého slova GEODESIE je dělení půdy, země. Geodesie se zabývá měřením, výpočtem a zobrazením částí povrchu zemského, určením tvaru a velikosti země. Základní úlohou
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna