Západočeská univerzita v Plzni Fakulta aplikovaných věd KKY/LS2. Plzeň, 2008 Pavel Jedlička
|
|
|
- Eduard Štěpánek
- před 9 lety
- Počet zobrazení:
Transkript
1 Západočeská univerzita v Plzni Fakulta aplikovaných věd KKY/LS2 Semestrální práce Plzeň, 2008 Jan Krčmář Pavel Jedlička

2 1 Měřený model Je zadán systém (1), který budeme diskretizovat použitím funkce c2d s parametrem zoh v matlabu. Poté provedeme zpětný posuv. 4 F (p) = p 2 (1) + 0.4p + 1 F (z) = z z z F (z) = z z z z 2 Systém a jeho odezvu nasimulujeme v simulinku. Používáme vzorkovací periodu 0.2 s. Obrázek 1: Zapojení v simulinku Tím záskáme vstupní hodnoty u a výstupní hodnoty y. Pomocí matlabu určíme parametry regresního systému. b 1 z + b 2 F s (z) = z 2 + a 1 z + a 2 Po zanedbání nuly vypadá přenos takto Θ = [ ] T z F s (z) = z z s F s (p) = p p F s (p) = p p Zanedbáním nuly jsme se nedopustili téměř žádné chyby. Přechodové charakteristiky jsou téměř totožné. Jednotlivé impulzní a přechodové charakteristiky jsou na obrázku (2). Vypočteme diskretizované modely při T = 0.2 s a jejich póly 1
 = z 2 + a 1 z + a 2 Po zanedbání nuly vypadá přenos takto Θ = [ 1.8828 0.9212 0.1935 0.0020 ] T 0.1516z + 0.002013 F s (z) = z 2 1.885z + 0.923 0.3863s + 4.009 F s (p) = p 2 + 0.")
3 1. tvarovač nultého řádu z F s (z) = z z p 1,2 = ± i 2. obdélníková aproximace F s (z) = z z z z p 1,2 = ± i 3. lichoběžníková aproximace F s (z) = z z z z p 1,2 = ± i Aproximace přechodových charakteristik se od původního systému příliš neliší a velice věrně popisují spojitý systém. Impulzní charakteristiky nejsou tak přesné. Aproximace popisují systém s vetší chybou, protože jsme volili větší periodu vzorkování. Nejlépe vychází lichoběžníková aproximace. Z grafu (3) je patrné, že póly diskrétních přenosů jsou umístěny téměř na stejném místě. Póly získané tranformací z = e pt resp. p = 1 T ln z jsou také uvnitř jednotkové kružnice, můžeme tedy tvrdit že stabilita zůstane zachována. Póly prvních dvou přenosů jsou stejné, lichoběžníková aproximace má póly na jiném místě. 2

4 Obrázek 2: Přechodové a impulzní chrakteristiky pro aproximaci tvarovačem, obdélníkovou a lichoběžníkovou 3

5 Obrázek 3: Póly dikrétních přenosů 4

6 2 Polohový servosystém Uvažujeme polohový servosystém podle schématu (4) a (1) podle zadání. Obrázek 4: Schéma zapojení polohového servosystému Kritické zesíení získáme pokusným nastavením hodnoty Přenos uzavřené smyčky je K krit = K = 0.95 K krit = F y,v (p) = Konstantní porucha v se na výstupu projeví 0.04 p p 2 + p lim F y,v(p) = 0.04 = % p Z bodeho charakteristiky (5) určíme bezpečnost ve fázi P m = 7.5 o. Korekční článek jsme experimentálně určili (2). Jedná se o integrační článek. Z bodeho charakteristiky (8) určíme bezpečnost v zesíleni G m = 9.61 db a bezpečnost ve fázi P m = 46 o. F k (p) = 0.8 3p + 1 (2) Citlivostní funkce se definuje jako (3). Průběh citlivostní funkce před a po korekci nám ukazuje graf (9). Je vidět, že korekce výrazně potlačuje harmonické poruchy okolo 0.95 rad/sec. S(jω) = F o (jw) (3) 5
 určíme bezpečnost ve fázi P m = 7.5 o. Korekční článek jsme experimentálně určili (2). Jedná se o integrační článek.")
7 Obrázek 5: Bodeho diagram Obrázek 6: Odezva uzavřeného systému polohového servosystému 6

8 Obrázek 7: Přechodová charakteristika s korekčním článkem Obrázek 8: Bodeho diagram s korekčním článkem 7

9 Obrázek 9: Bodeho diagram pro citlivostní funkce 8

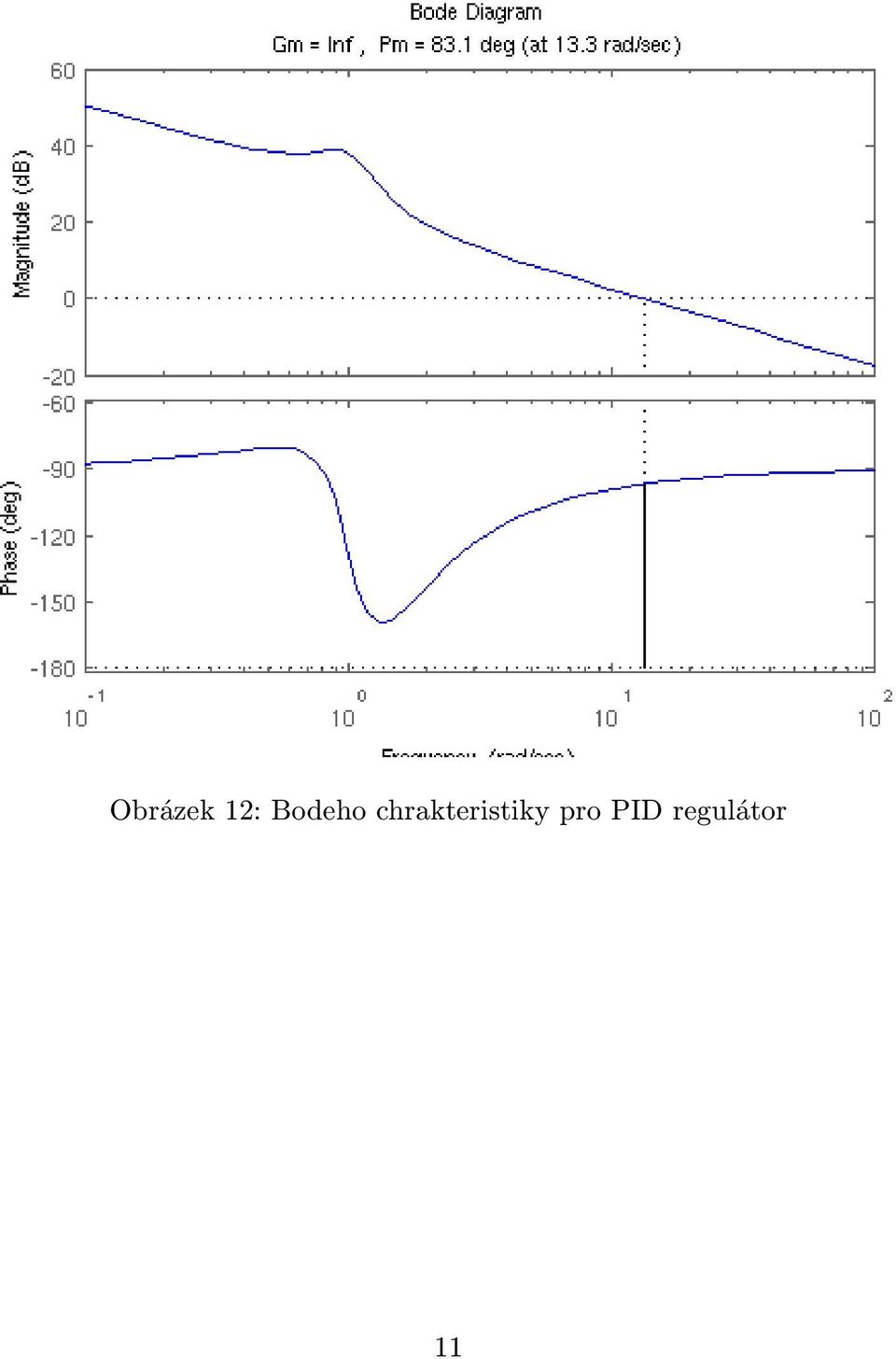
10 3 PID regulátor Požadované hodnoty jsou G 10% a maximální doba regulace T reg 5 s. Vypočteme konstantu ω n podle vzorců ln σ max ξ π 1 + ( ln σ max ) 2 = ξ = 0.6 π ω n = 4.6 ξt reg = 1.533; rad/sec Určíme přenos požadovaného systému (4) a jeho komplexně sdružené póly (5). F s (p) = ω 2 n p 2 + 2ξω n p + ω 2 n = p p (4) p 1,2 = 0.92 ± i (5) Dále předpokládáme ideální PID a zvolíme jeho nuly poblíž pólů požadovaného systému. z = 1 ± 1.2j (p z i ) = (p j)(p j) = p 2 + 2p F P ID = K d p 2 + d 1 p + d 0 p = K d p 2 + 2p p Přenos otevřené regulační smyčky je F o (p) = F s (p)f P ID (p) = K d 4.009p p p p p Z grafu GMK (10) určíme zesílení K d = 3.32 posunem ve směru GMK. Regulační systém předpokládáme ve tvaru (6) a konstanty dopočteme. Porovnání přechodových charakteristik je na obrázku (11). Je vidět, že regulovaný systém splňuje požazavky. Bodeho charakteristika a bezpečnost ve fázi a zesílení otevřené regulační smyčky je na obrázku (12). K = K d d 1 = 6.64 K i = K d d 0 = F P ID (p) = K + K i p + K dp = p (6) p Přechodová charakteristika pro uzavřený regulovaný systém je F s (p) = 13.31p p p p p
 = F s (p)f P ID (p) = K d 4.009p 2 + 8.018p + 9.783 p 3 + 0.4008p 2 + 0.")
11 Obrázek 10: Zobrazení GMK Obrázek 11: Přechodové charakteristiky s PID regulátorem 10

12 Obrázek 12: Bodeho chrakteristiky pro PID regulátor 11
13 4 2DOF regulátor Požadovaný přenos uzavřeného systému chceme F y,w (p) = Y (p) W (p) = 2.44 p p = B M(p) A M (p) (7) Přenos uzavřeného regulačního obvodu má tvar F y,w (p) = Y (p) W (p) = α = B M(p) B(p) αt (p)b(p) A(p)C(p) + B(p)D(p) = A(p)C(p) + B(p)D(p) = A M (p)t (p) 1. T (p) = p c(p) = p d(p) = 0.26p T (p) = p + 2 c(p) = p d(p) = p Přechodové charakteristiky jsou v obou případech stejné a shodují se s přenosem systému (7). Přechodová charakteristika je na obrázku (14). Obrázek 13: Přechodová charakteristika s 2 DOF Citlivostní funkci jsme definovali jako (3). Pro její určení potřebuje znát přenos otevřeného systému. Ten je vyjádřen F o = αt(p)b(p) c(p)a(p) 12
. Přechodová charakteristika je na obrázku (14).")
14 1. T (p) = p T (p) = p + 2 F o (p) = F o (p) = 2.44p p p p p p p p Obrázek 14: Citlivost pro 2 DOF regulátor s různými polynomy T(p) 13

15 5 Stavový regulátor a kritérium ITAE Z přenosu (1) určíme stavový popis [ ] 0 1 A = B = [ ] 0 3 C = [ 1 0 ] Dále určíme matice [ ] A Bk Bkw A z = B w C A w k = [k 1 k 2 ] A w = 0 B w = 1 Pro zvolené ω n = 1 platí po dosazení do vzorce podle kritéria ITAE det(pi A z ) = p p p + 1. Můžeme tedy vypočítat konstanty k w = k = [ ] Odezva na referenční signál je na obrázku (15). Simulace byla provedena v Simulinku. Sledování referenčního signálu je relativně pomalé, ale s malým překmitem. Obrázek 15: Odezva systému na po částech konstantní funkci 14
. Simulace byla provedena v Simulinku.")
16 6 Obecný diskrétní regulátor Diskrétní přenos systému je F s (z) = z z z = B(z) A(z) Přenos referenčního systému w(t) = sin(ωt ). Perioda vzorkování je T = 0.2 s a ω = 1 rad/s. W (z) = z sin(ωt ) z 2 2z cos(ωt ) + 1 = z z z + 1 Polynomy v čitateli a jmenovateli přenosu regulátoru budou stupně st(c) = 4. Přenos regulátoru bude F r (z) = d 4z 4 + d 3 z 3 + d 2 z 2 + d 1 z + d 0 (z 1)(z z + 1)(z c 0 ) = D(z) C(z) Polynom z c 0 je stupně m = 1. To bylo určeno ze vzorce m + n = 2m 1, kde n = 2 je stupeň přenosu F s (z). A z (z) = C(z)A(z) + D(z)B(z) = z st(c)+st(a) = z 6 Můžeme tedy vypočíst jednotlivé koeficienty u přenosu regulátoru. z 6 = (z 1)(z z+1)(z c 0 )(z z+0.923)+(d 4 z 4 +d 3 z 3 +d 2 z 2 +d 1 z+d 0 )(0.1516z ) d 4 = d 3 = d 2 = d 1 = d 0 = c 0 = Konečný přenos regulátoru ted yvypadá takto F r (z) = 31.87z z z z z z z z Přechodová charakteristika (16) ukazuje správnou regulaci po 5ti krocích. V grafu je zakreslena i chyba a řízení. 15
. A z (z) = C(z)A(z) + D(z)B(z) = z st(c)+st(a) = z 6 Můžeme tedy vypočíst jednotlivé koeficienty u přenosu regulátoru.")
17 Obrázek 16: Odezva regulovaného systému na w(t) = sin t 16

18 7 dead-beat, ripple-free control Přenos budeme uvažovat jak bylo zadáno F s (p) = 1 p Po diskretizování získáváme přenos p p = p p p F s (z) = z z z z z = z z z z z Náš přenos lze upravit do tvaru F s (z) = K s Přenos regulátoru uvažujeme ve tvaru B(z) (z 1)A(z) = z z (z 1)(z z ) F r (z) = K r D(z) C(z) Aby byly splněny podmínky dead beat, ripple free control je nutné, aby platilo D(z) = A(z) (z 1)C(z) + K r K s B(z) = z n K r K s B(z) = 1 pro z = 1 2. Stupeň přenosu regulátoru určíme, tak aby bylo možné uregulovat náš systém jako st(c) = st(d) = F r (z) = K r z2 + d 1 z + d 0 z 2 + c 1 z + c 0 Dosazením do podmínek získáme soustavy rovnic a z nich určíme jednotlivé parametry regulátoru c 1 = c 0 = d 1 = d 0 = A přenos regulátoru bude vypadat takto F r (z) = z z z z Přechodová charakteristika regulovaného systému (17) ukazuje regulaci po třech krocích. Průběh řízení je na obrázku (18). 17
 F r (z) = K r D(z) C(z) Aby byly splněny podmínky dead beat, ripple free control je nutné, aby platilo D(z) = A(z) (z 1)C(z) + K r K s B(z) = z n K r K s B(z) = 1 pro z = 1 2.")
19 Obrázek 17: Odezva regulovaného systému dead beat, ripple free Obrázek 18: Průběh řízení pro dead beat, ripple free 18

20 8 Úplný rekonstruktor stavu Stavový popis systému je ẋ = Ax + Bu y = Cx Rekonstruktor stavu předpokládáme ve tvaru ˆx = F ˆx(t) + Gu(t) + Ky(t) ŷ(t) = C ˆx(t) Stavový popis systému bereme [ ] 0 1 A = B = [ ] 0 1 C = [ 4 0 ] Pro náš systém n = 2 a parametr K = [k1 k2] T můžeme určit z rovnice det(pi A + KC) = n (p p i ) (8) i Vlastní čísla matice dynamiky rekonstruktoru F musí ležet v pravé polorovině. Využijeme vztahu pro umistitelnost pólů a volíme parametry p 1,2, protože chceme, aby byl rekonstruktor rychlejší, než náš systém. p 1 = 5 p 2 = 6 Dosazením do rovnice (8) získáme (p + 5)(p + 6) = (p 4k 1 )(p + 0.4) + (1 4k 2 ) A můžeme tedy vypočíst parametr K a určit matici F = A KC. [ ] K = [ ] T F = V simulinku spustíme simulaci s počátečními podmínkami ˆx 0 = [ 2 0.5] T. Výstup je v grafu (19). Rekonstruktor se se systémem schoduje již po 2 vteřinách. Při nulových počátečních podmínkách ˆx 0 = [0 0] T se výstup rekonstruktoru a systému schoduje, což je patrné v grafu (20). 19
 získáme (p + 5)(p + 6) = (p 4k 1 )(p + 0.4) + (1 4k 2 ) A můžeme tedy vypočíst parametr K a určit matici F = A KC. [ ] K = [2.6437 6.1746] T 10.5992 1.")
21 Obrázek 19: Porovnání výstupu rekonstruktoru a systému Obrázek 20: Porovnání výstupu rekonstruktoru a systému při n.p.p. 20
22 9 Porovnání stavového regulátoru a rekonstruktoru Porovnání regulátoru a rekonstruktoru je v obrázku (21). Stavový regulátor a rekonstruktor mají přechodovou charakteristiku téměř stejnou. Je vidět, že rekonstruktor dožene regulovaný systém již po 5-ti vteřinách. Obrázek 21: Porovnání výstupu rekonstruktoru a regulovaného systému 10 Závěr V práci jsme si oveřili základní postupy při navrhování regulátorů, jak diskrétních tak spojitých. Přes občasné problémy jsme všechny části práce zvládli k uspokojivému výsledku. Na konci práce jsme porovnávali regulátor a rekonstruktor. Výsledky jsou velmi podobné. 21
Západočeská univerzita. Lineární systémy 2
 Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Západočeská univerzita FAKULTA APLIKOVANÝCH VĚD Lineární systémy Semestrální práce vypracoval: Jan Popelka, Jiří Pročka 1. květen 008 skupina: pondělí 7-8 hodina 1) a) Jelikož byly měřící přípravky nefunkční,
Model helikoptéry H1
 Model helikoptéry H Jan Nedvěd nedvej@fel.cvut.cz Hodnoty a rovnice, které jsou zde uvedeny, byly naměřeny a odvozeny pro model vrtulníku H umístěného v laboratoři č. 26 v budově Elektrotechnické fakulty
Model helikoptéry H Jan Nedvěd nedvej@fel.cvut.cz Hodnoty a rovnice, které jsou zde uvedeny, byly naměřeny a odvozeny pro model vrtulníku H umístěného v laboratoři č. 26 v budově Elektrotechnické fakulty
Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc.
 Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Řízení a regulace I Základy regulace lineárních systémů - spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je:
, za předpokladu, že je:") Ivan Douša Vodárna2. Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je: 1. povolena odchylka do 5% v ustáleném stavu na skok řídicí veličiny
Ivan Douša Vodárna2. Pro model vodárny č. 2.; navrhněte a odzkoušejte vhodné typy regulátorů (P, PI, I, PD a PID), za předpokladu, že je: 1. povolena odchylka do 5% v ustáleném stavu na skok řídicí veličiny
Studijní opory k předmětu 6AA. 6AA Automatizace. Studijní opory k předmětu. Ing. Petr Pokorný 1/40 6AA AUTOMATIZACE 6AA - cvičení
 6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
6AA Automatizace Studijní opory k předmětu Ing. Petr Pokorný 1/40 6AA Obsah: Logické řízení - Boolova algebra... 4 1. Základní logické funkce:... 4 2. Vyjádření Booleových funkcí... 4 3. Zákony a pravidla
Řízení a regulace I. Základy regulace lineárních systémů- spojité a diskrétní. Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc.
 Řízení a regulace I Základy regulace lineárních systémů- spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
Řízení a regulace I Základy regulace lineárních systémů- spojité a diskrétní Ing. Petr BLAHA, PhD. Prof. Ing. Petr VAVŘÍN, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY Fakulta elektrotechniky a komunikačních
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ
 OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ Anotace: Ing. Zbyněk Plch VOP-026 Šternberk s.p., divize VTÚPV Vyškov Zkušebna elektrické bezpečnosti a
OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ Anotace: Ing. Zbyněk Plch VOP-026 Šternberk s.p., divize VTÚPV Vyškov Zkušebna elektrické bezpečnosti a
Reference 10. Předpokládejme stavový popis spojitého, respektive diskrétního systému
 Módy systému Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 8 Reference Úvod Řešení stavových rovnic Předpokládejme stavový popis spojitého, respektive diskrétního systému ẋ(t)=ax(t)+bu(t)
Módy systému Teorie dynamických systémů Obsah Úvod 2 Příklady 2 3 Domácí úlohy 8 Reference Úvod Řešení stavových rovnic Předpokládejme stavový popis spojitého, respektive diskrétního systému ẋ(t)=ax(t)+bu(t)
Filmová odparka laboratorní úlohy
 VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE Filmová odparka laboratorní úlohy Část 1 ÚLOHY PRO VÝUKU PŘEDMĚTU MĚŘICÍ A ŘÍDICÍ TECHNIKA Verze: 1.0 Prosinec 2004 ÚLOHA 1 Regulace tlaku v brýdovém prostoru
VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE Filmová odparka laboratorní úlohy Část 1 ÚLOHY PRO VÝUKU PŘEDMĚTU MĚŘICÍ A ŘÍDICÍ TECHNIKA Verze: 1.0 Prosinec 2004 ÚLOHA 1 Regulace tlaku v brýdovém prostoru
. Určete hodnotu neznámé x tak, aby
 Fakulta informačních technologií ČVUT v Praze Přijímací zkouška z matematiky 015 Kód uchazeče ID:.................. Varianta: 1 1. Původní cena knihy byla 50 Kč. Pak byla zdražena o 15 %. Jelikož nešla
Fakulta informačních technologií ČVUT v Praze Přijímací zkouška z matematiky 015 Kód uchazeče ID:.................. Varianta: 1 1. Původní cena knihy byla 50 Kč. Pak byla zdražena o 15 %. Jelikož nešla
Jaroslav Hlava. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Jaroslav Hlava THIKÁ UIVZIT V LII Fakulta mechatroniky, informatiky a meioborových stuií Tento materiál vnikl v rámci rojektu F Z..7/../7.47 eflexe ožaavků růmyslu na výuku v oblasti automatického říení
Jaroslav Hlava THIKÁ UIVZIT V LII Fakulta mechatroniky, informatiky a meioborových stuií Tento materiál vnikl v rámci rojektu F Z..7/../7.47 eflexe ožaavků růmyslu na výuku v oblasti automatického říení
Měření logaritmického dekrementu kmitů v U-trubici
 Měření logaritmického dekrementu kmitů v U-trubici Online: http://www.sclpx.eu/lab2r.php?exp=17 Tento experiment, autorem publikovaný v [31] a [32], je z pohledu středoškolského učiva opět nadstavbový
Měření logaritmického dekrementu kmitů v U-trubici Online: http://www.sclpx.eu/lab2r.php?exp=17 Tento experiment, autorem publikovaný v [31] a [32], je z pohledu středoškolského učiva opět nadstavbový
21 Diskrétní modely spojitých systémů
 21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
PRAKTIKUM I. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK. úloha č. 11 Název: Dynamická zkouška deformace látek v tlaku
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. úloha č. 11 Název: Dynamická zkouška deformace látek v tlaku Pracoval: Jakub Michálek stud. skup. 15 dne:. dubna 009 Odevzdal
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. úloha č. 11 Název: Dynamická zkouška deformace látek v tlaku Pracoval: Jakub Michálek stud. skup. 15 dne:. dubna 009 Odevzdal
Ṡystémy a řízení. Helikoptéra Petr Česák
 Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Ṡystémy a řízení Helikoptéra 2.......... Petr Česák Letní semestr 2001/2002 . Helikoptéra 2 Identifikace a řízení modelu ZADÁNÍ Identifikujte laboratorní model vodárny č. 2.; navrhněte a odzkoušejte vhodné
Nastavení parametrů PID a PSD regulátorů
 Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Fakulta elektrotechniky a informatiky Univerzita Pardubice Nastavení parametrů PID a PSD regulátorů Semestrální práce z předmětu Teorie řídicích systémů Jméno: Jiří Paar Datum: 9. 1. 2010 Zadání Je dána
Funkce zadané implicitně
 Kapitola 8 Funkce zadané implicitně Začneme několika příklady. Prvním je známá rovnice pro jednotkovou kružnici x 2 + y 2 1 = 0. Tato rovnice popisuje křivku, kterou si však nelze představit jako graf
Kapitola 8 Funkce zadané implicitně Začneme několika příklady. Prvním je známá rovnice pro jednotkovou kružnici x 2 + y 2 1 = 0. Tato rovnice popisuje křivku, kterou si však nelze představit jako graf
1 Lineární stochastický systém a jeho vlastnosti. 2 Kovarianční funkce, výkonová spektrální hustota, spektrální faktorizace,
 Lineární stochastický systém a jeho vlastnosti. Kovarianční funkce, výkonová spektrální hustota, spektrální faktorizace, tvarovací filtr šumu, bělicí filtr. Kalmanův filtr, formulace problemu, vlastnosti.
Lineární stochastický systém a jeho vlastnosti. Kovarianční funkce, výkonová spektrální hustota, spektrální faktorizace, tvarovací filtr šumu, bělicí filtr. Kalmanův filtr, formulace problemu, vlastnosti.
Ostrovní provoz BlackOut
 Ostrovní provoz BlackOut Ivan Petružela 2006 LS X15PES - 13. Ostrovní provoz 1 Osnova Frekvenční plán Ostrovní provoz Frekvenční kolaps v rovině (f,p) Obnovení frekvence pomocí frekvenčního odlehčování
Ostrovní provoz BlackOut Ivan Petružela 2006 LS X15PES - 13. Ostrovní provoz 1 Osnova Frekvenční plán Ostrovní provoz Frekvenční kolaps v rovině (f,p) Obnovení frekvence pomocí frekvenčního odlehčování
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE. Řízení DC-DC konvertoru
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE Řízení DC-DC konvertoru Plzeň, 213 Martin Langmajer P R O H L Á Š E N Í Předkládám tímto k posouzení a obhajobě
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE Řízení DC-DC konvertoru Plzeň, 213 Martin Langmajer P R O H L Á Š E N Í Předkládám tímto k posouzení a obhajobě
Experimentální metody EVF II.: Mikrovlnná
 Experimentální metody EVF II.: Mikrovlnná měření parametrů plazmatu Vypracovali: Štěpán Roučka, Jan Klusoň Zadání: Měření admitance kolíku impedančního transformátoru v závislosti na hloubce zapuštění.
Experimentální metody EVF II.: Mikrovlnná měření parametrů plazmatu Vypracovali: Štěpán Roučka, Jan Klusoň Zadání: Měření admitance kolíku impedančního transformátoru v závislosti na hloubce zapuštění.
+ ω y = 0 pohybová rovnice tlumených kmitů. r dr dt. B m. k m. Tlumené kmity
 Tlumené kmit V praxi téměř vžd brání pohbu nějaká brzdicí síla, jejíž původ je v třecích silách mezi reálnými těles. Matematický popis těchto sil bývá dosti komplikovaný. Velmi často se vsktuje tzv. viskózní
Tlumené kmit V praxi téměř vžd brání pohbu nějaká brzdicí síla, jejíž původ je v třecích silách mezi reálnými těles. Matematický popis těchto sil bývá dosti komplikovaný. Velmi často se vsktuje tzv. viskózní
1. Změřte statickou charakteristiku termistoru pro proudy do 25 ma a graficky ji znázorněte.
 1 Pracovní úkoly 1. Změřte statickou charakteristiku termistoru pro proudy do 25 ma a graficky ji znázorněte. 2. Změřte teplotní závislost odporu termistoru v teplotním intervalu přibližně 180 až 380 K.
1 Pracovní úkoly 1. Změřte statickou charakteristiku termistoru pro proudy do 25 ma a graficky ji znázorněte. 2. Změřte teplotní závislost odporu termistoru v teplotním intervalu přibližně 180 až 380 K.
Univerzita Tomáše Bati ve Zlíně
 Univerzita omáše Bati ve Zlíně LABORAORNÍ CVIČENÍ ELEKROECHNIKY A PRŮMYSLOVÉ ELEKRONIKY Název úlohy: Měření frekvence a fázového posuvu proměnných signálů Zpracovali: Petr Luzar, Josef Moravčík Skupina:
Univerzita omáše Bati ve Zlíně LABORAORNÍ CVIČENÍ ELEKROECHNIKY A PRŮMYSLOVÉ ELEKRONIKY Název úlohy: Měření frekvence a fázového posuvu proměnných signálů Zpracovali: Petr Luzar, Josef Moravčík Skupina:
Příklady k přednášce 24 Diskrétní řízení
 Příklady k přednášce 4 Diskrétní řízení Michael Šebek Automatické řízení 03 3-5-4 Automatické řízení - Kybernetika a robotika Vezměme opět dvojitý integrátor vzorkovaný s periodou h h h xk ( + ) 0 xk +
Příklady k přednášce 4 Diskrétní řízení Michael Šebek Automatické řízení 03 3-5-4 Automatické řízení - Kybernetika a robotika Vezměme opět dvojitý integrátor vzorkovaný s periodou h h h xk ( + ) 0 xk +
6. Střídavý proud. 6. 1. Sinusových průběh
 6. Střídavý proud - je takový proud, který mění v čase svoji velikost a smysl. Nejsnáze řešitelný střídavý proud matematicky i graficky je sinusový střídavý proud, který vyplývá z konstrukce sinusovky.
6. Střídavý proud - je takový proud, který mění v čase svoji velikost a smysl. Nejsnáze řešitelný střídavý proud matematicky i graficky je sinusový střídavý proud, který vyplývá z konstrukce sinusovky.
Řízení a regulace II. Analýza a řízení nelineárních systémů Verze 1.34 8. listopadu 2004
 Řízení a regulace II Analýza a řízení nelineárních systémů Verze 1.34 8. listopadu 2004 Prof. Ing. František Šolc, CSc. Ing. Pavel Václavek, Ph.D. Prof. Ing. Petr Vavřín, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ
Řízení a regulace II Analýza a řízení nelineárních systémů Verze 1.34 8. listopadu 2004 Prof. Ing. František Šolc, CSc. Ing. Pavel Václavek, Ph.D. Prof. Ing. Petr Vavřín, DrSc. ÚSTAV AUTOMATIZACE A MĚŘICÍ
Téma je podrobně zpracováno ve skriptech [1], kapitola
![Téma je podrobně zpracováno ve skriptech [1], kapitola](/thumbs/39/19231280.jpg "Téma je podrobně zpracováno ve skriptech [1], kapitola") Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 6. Základní aproximační úlohu lze popsat následovně: Jsou dány body [x 0, y 0 ], [x 1, y 1 ],..., [x n, y n
Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 6. Základní aproximační úlohu lze popsat následovně: Jsou dány body [x 0, y 0 ], [x 1, y 1 ],..., [x n, y n
Kirchhoffovy zákony. Kirchhoffovy zákony
 Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST
 VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST 5.1. Snímač 5.2. Obvody úpravy signálu 5.1. SNÍMAČ Napájecí zdroj snímač převod na el. napětí - úprava velikosti - filtr analogově číslicový převodník
VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST 5.1. Snímač 5.2. Obvody úpravy signálu 5.1. SNÍMAČ Napájecí zdroj snímač převod na el. napětí - úprava velikosti - filtr analogově číslicový převodník
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Semestrální práce z předmětu Teorie systémů
 Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
6. T e s t o v á n í h y p o t é z
 6. T e s t o v á n í h y p o t é z Na základě hodnot z realizace náhodného výběru činíme rozhodnutí o platnosti hypotézy o hodnotách parametrů rozdělení nebo o jeho vlastnostech. Používáme k tomu vhodně
6. T e s t o v á n í h y p o t é z Na základě hodnot z realizace náhodného výběru činíme rozhodnutí o platnosti hypotézy o hodnotách parametrů rozdělení nebo o jeho vlastnostech. Používáme k tomu vhodně
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
s požadovaným výstupem w(t), a podle této informace generuje akční zásah u(t) do
, a podle této informace generuje akční zásah u(t) do") Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot
 Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
Srovnání PID regulace a anisochronního řízení na PLC Tecomat Foxtrot Martin Hunčovský 1,*, Petr Siegelr 1,* 1 ČVUT v Praze, Fakulta strojní, Ústav přístrojové a řídící techniky, Technická 4, 166 07 Praha
Generátor s IO 555 101-3R
 Vyšší odborná škola a Střední průmylová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy Čílo úlohy Generátor IO 555 101-3R Zadání 1. Pomocí IO 555 navrhněte
Vyšší odborná škola a Střední průmylová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy Čílo úlohy Generátor IO 555 101-3R Zadání 1. Pomocí IO 555 navrhněte
Kvadratická rovnice. - koeficienty a, b, c jsou libovolná reálná čísla, a se nesmí rovnat 0
 Kvadratické rovnice Kvadratická rovnice a + b + c = 0 a, b, c R a 0 - koeficienty a, b, c jsou libovolná reálná čísla, a se nesmí rovnat 0 - pokud by koeficient a byl roven nule, jednalo by se o rovnici
Kvadratické rovnice Kvadratická rovnice a + b + c = 0 a, b, c R a 0 - koeficienty a, b, c jsou libovolná reálná čísla, a se nesmí rovnat 0 - pokud by koeficient a byl roven nule, jednalo by se o rovnici
ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Modelování a simulace systémů cvičení 9 ZPĚTNOVAZEBNÍ ŘÍZENÍ, POŽADAVKY NA REGULACI Petr Hušek (husek@fel.cvut.cz)
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Mária Sadloňová. Fajn MATIKA. 150 řešených příkladů (vzorek)
") Mária adloňová Fajn MATIKA (nejen) na přijímačky 50 řešených příkladů (vorek) 0 Mgr. Mária adloňová FajnMATIKA (nejen) na přijímačky 50 řešených příkladů (reklamní vorek) Mgr. Mária adloňová, 0 Vydavatel
Mária adloňová Fajn MATIKA (nejen) na přijímačky 50 řešených příkladů (vorek) 0 Mgr. Mária adloňová FajnMATIKA (nejen) na přijímačky 50 řešených příkladů (reklamní vorek) Mgr. Mária adloňová, 0 Vydavatel
Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech
 Proceedings of International Scientific onference of FME Session 4: Automation ontrol and Applied Informatics Paper 7 Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech DAVIDOVÁ, Olga
Proceedings of International Scientific onference of FME Session 4: Automation ontrol and Applied Informatics Paper 7 Stanovení typu pomocného regulátoru v rozvětvených regulačních obvodech DAVIDOVÁ, Olga
Strojírenské výpočty. Technická zpráva č. 2
 Strojírenské výpočty Technická zpráva č. 2 Václav Valíček, 2A/5 9.12.2015 Obsah 1 Sinusové pravítko... 2 1.1 Teorie... 2 1.2 Výpočtové vzorce + zadání... 2 1.3 Výpočet... 3 1.4 Sestavení výšky... 3 1.5
Strojírenské výpočty Technická zpráva č. 2 Václav Valíček, 2A/5 9.12.2015 Obsah 1 Sinusové pravítko... 2 1.1 Teorie... 2 1.2 Výpočtové vzorce + zadání... 2 1.3 Výpočet... 3 1.4 Sestavení výšky... 3 1.5
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Učební text Přednášky 1-3 Osvald Modrlák Lukáš Hubka Liberec 2010 Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247)
TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Učební text Přednášky 1-3 Osvald Modrlák Lukáš Hubka Liberec 2010 Materiál vznikl v rámci projektu ESF (CZ.1.07/2.2.00/07.0247)
12 - Frekvenční metody
 12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu
 1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
1 Portál pre odborné publikovanie ISSN 1338-0087 Identifikace a řízení nelineárního systému pomocí Hammersteinova modelu Brázdil Michal Elektrotechnika 25.04.2011 V praxi se často setkáváme s procesy,
 Vážení zákazníci, dovolujeme si Vás upozornit, že na tuto ukázku knihy se vztahují autorská práva, tzv. copyright. To znamená, že ukázka má sloužit výhradnì pro osobní potøebu potenciálního kupujícího
Vážení zákazníci, dovolujeme si Vás upozornit, že na tuto ukázku knihy se vztahují autorská práva, tzv. copyright. To znamená, že ukázka má sloužit výhradnì pro osobní potøebu potenciálního kupujícího
Obsah. Gain scheduling. Obsah. Linearizace
 Regulace a řízení II Řízení nelineárních systémů Regulace a řízení II Řízení nelineárních systémů - str. 1/29 Obsah Obsah Gain scheduling Linearizace Regulace a řízení II Řízení nelineárních systémů -
Regulace a řízení II Řízení nelineárních systémů Regulace a řízení II Řízení nelineárních systémů - str. 1/29 Obsah Obsah Gain scheduling Linearizace Regulace a řízení II Řízení nelineárních systémů -
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
Obrázek č. 7.0 a/ regulační smyčka s regulátorem, ovladačem, regulovaným systémem a měřicím členem b/ zjednodušené schéma regulace
 Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
Automatizace 4 Ing. Jiří Vlček Soubory At1 až At4 budou od příštího vydání (podzim 2008) součástí publikace Moderní elektronika. Slouží pro výuku předmětu automatizace na SPŠE. 7. Regulace Úkolem regulace
MATEMATICKÁ ANALÝZA A LINEÁRNÍ ALGEBRA PŘÍPRAVA NA ZKOUŠKU PRO SAMOUKY
 MATEMATICKÁ ANALÝZA A LINEÁRNÍ ALGEBRA PŘÍPRAVA NA ZKOUŠKU PRO SAMOUKY POMNĚNKA prase Pomni, abys nezapomněl na Pomněnku MSc. Catherine Morris POMNĚNKA Verze ze dne: 14. října 01 Materiál je v aktuální
MATEMATICKÁ ANALÝZA A LINEÁRNÍ ALGEBRA PŘÍPRAVA NA ZKOUŠKU PRO SAMOUKY POMNĚNKA prase Pomni, abys nezapomněl na Pomněnku MSc. Catherine Morris POMNĚNKA Verze ze dne: 14. října 01 Materiál je v aktuální
Opravné prostředky na výstupu měniče kmitočtu (LU) - Vyšetřování vlivu filtru na výstupu z měniče kmitočtu
 - Vyšetřování vlivu filtru na výstupu z měniče kmitočtu") Opravné prostředky na výstupu měniče kmitočtu (LU) - Vyšetřování vlivu filtru na výstupu z měniče kmitočtu 1. Rozbor možných opravných prostředků na výstupu z napěťového střídače vč. příkladů zapojení
Opravné prostředky na výstupu měniče kmitočtu (LU) - Vyšetřování vlivu filtru na výstupu z měniče kmitočtu 1. Rozbor možných opravných prostředků na výstupu z napěťového střídače vč. příkladů zapojení
Rovnice. RNDr. Yvetta Bartáková. Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou
 Rovnice RNDr. Yvetta Bartáková Gmnázium, SOŠ a VOŠ Ledeč nad Sázavou Grafické řešení soustav rovnic a nerovnic VY INOVACE_0 0_M Gmnázium, SOŠ a VOŠ Ledeč nad Sázavou Soustav lineárních rovnic Soustavou
Rovnice RNDr. Yvetta Bartáková Gmnázium, SOŠ a VOŠ Ledeč nad Sázavou Grafické řešení soustav rovnic a nerovnic VY INOVACE_0 0_M Gmnázium, SOŠ a VOŠ Ledeč nad Sázavou Soustav lineárních rovnic Soustavou
DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND
 DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND Autor práce: Ing. Lukáš Kanta Obsah prezentace 1. Seznámení s aerodynamickým kalibračním
DOOSAN Škoda Power s. r. o. a Západočeská univerzita v Plzni ŘÍZENÍ AERODYNAMICKÉHO TUNELU PRO KALIBRACI TLAKOVÝCH SOND Autor práce: Ing. Lukáš Kanta Obsah prezentace 1. Seznámení s aerodynamickým kalibračním
Příklady k přednášce 5 - Identifikace
 Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Regulace frekvence a napětí
 Regulace frekvence a napětí Ivan Petružela 2006 LS X15PES - 5. Regulace frekvence a napětí 1 Osnova Opakování Blokové schéma otáčkové regulace turbíny Statická charakteristika (otáčky, výkon) turbíny Zajištění
Regulace frekvence a napětí Ivan Petružela 2006 LS X15PES - 5. Regulace frekvence a napětí 1 Osnova Opakování Blokové schéma otáčkové regulace turbíny Statická charakteristika (otáčky, výkon) turbíny Zajištění
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
ÚLOHA R1 REGULACE TLAKU V BRÝDOVÉM PROSTORU ODPARKY
 VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE Ústav počítačové a řídicí techniky Ústav fyziky a měřicí techniky LABORATOŘ OBORU IIŘP ÚLOHA R1 REGULACE TLAKU V BRÝDOVÉM PROSTORU ODPARKY Zpracoval: Miloš Kmínek
VYSOKÁ ŠKOLA CHEMICKO-TECHNOLOGICKÁ V PRAZE Ústav počítačové a řídicí techniky Ústav fyziky a měřicí techniky LABORATOŘ OBORU IIŘP ÚLOHA R1 REGULACE TLAKU V BRÝDOVÉM PROSTORU ODPARKY Zpracoval: Miloš Kmínek
ANALÝZA PLANETOVÝCH SOUKOLÍ POMOCÍ VÝPOČETNÍHO SYSTÉMU MATLAB
 ANALÝZA PLANETOVÝCH SOUKOLÍ POMOCÍ VÝPOČETNÍHO SYSTÉMU MATLAB Shrnutí Gabriela Achtenová České Vysoké Učení Technické v Praze, fakulta strojní Příspěvek se zabývá analýzou složených planetových soukolí
ANALÝZA PLANETOVÝCH SOUKOLÍ POMOCÍ VÝPOČETNÍHO SYSTÉMU MATLAB Shrnutí Gabriela Achtenová České Vysoké Učení Technické v Praze, fakulta strojní Příspěvek se zabývá analýzou složených planetových soukolí
BASPELIN CPL. Popis obsluhy regulátoru CPL CER01
 BASPELIN CPL Popis obsluhy regulátoru CPL CER01 prosinec 2007 CER01 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy zejména
BASPELIN CPL Popis obsluhy regulátoru CPL CER01 prosinec 2007 CER01 CPL Důležité upozornění Obsluhovat zařízení smí jen kvalifikovaná a řádně zaškolená obsluha. Nekvalifikované svévolné zásahy zejména
 Í Í ř ř ř Š ž Š Š Í Š ť Í Š Š Š Š ž Ř ž Ť Í ž ž ž ž ť ž ť ť Š Š ž Š Š ž ž Č ž Š ž Š Č ť Š Ř ž ž ž ď ž Í ž ž ž ž ž ž ť ž Í ž žž ž ž ť Č ž ž Č Ť ž ť ž ž ž ž ž ž ž ž ž ť Ř Ó ď Š ž ž ž ď ž Ť ž ť ž ď ž ď ž
Í Í ř ř ř Š ž Š Š Í Š ť Í Š Š Š Š ž Ř ž Ť Í ž ž ž ž ť ž ť ť Š Š ž Š Š ž ž Č ž Š ž Š Č ť Š Ř ž ž ž ď ž Í ž ž ž ž ž ž ť ž Í ž žž ž ž ť Č ž ž Č Ť ž ť ž ž ž ž ž ž ž ž ž ť Ř Ó ď Š ž ž ž ď ž Ť ž ť ž ď ž ď ž
Studentův průvodce po automatickém řízení
 Studentův průvodce po automatickém řízení Michael Šebek volně podle Denise Bernsteina 1, inspirován také Douglasem Adamsem 2 K čemu je automatické řízení Automatické řízení je zázračná technologie: Pomocí
Studentův průvodce po automatickém řízení Michael Šebek volně podle Denise Bernsteina 1, inspirován také Douglasem Adamsem 2 K čemu je automatické řízení Automatické řízení je zázračná technologie: Pomocí
Břetislav Fajmon, UMAT FEKT, VUT Brno. Poznámka 1.1. A) první část hodiny (cca 50 minut): představení všech tří metod při řešení jednoho příkladu.
 první část hodiny (cca 50 minut): představení všech tří metod při řešení jednoho příkladu.") Břetislav Fajmon, UMAT FEKT, VUT Brno Poznámka 1.1. A) první část hodiny (cca 50 minut): představení všech tří metod při řešení jednoho příkladu. Na jiných příkladech je téma podrobně zpracováno ve skriptech
Břetislav Fajmon, UMAT FEKT, VUT Brno Poznámka 1.1. A) první část hodiny (cca 50 minut): představení všech tří metod při řešení jednoho příkladu. Na jiných příkladech je téma podrobně zpracováno ve skriptech
Laboratorní úloha č. 4 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH VLASTNOSTÍ PNEUMATICKÝCH A ODPOROVÝCH TEPLOMĚRŮ
 Laboratorní úloha č 4 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH VLASTNOSTÍ PNEUMATICKÝCH A ODPOROVÝCH TEPLOMĚRŮ 1 Teoretický úvod Pro laboratorní a průmyslové měření teploty kapalných a plynných medií v rozsahu
Laboratorní úloha č 4 MĚŘENÍ STATICKÝCH A DYNAMICKÝCH VLASTNOSTÍ PNEUMATICKÝCH A ODPOROVÝCH TEPLOMĚRŮ 1 Teoretický úvod Pro laboratorní a průmyslové měření teploty kapalných a plynných medií v rozsahu
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
ELEKTŘINA A MAGNETIZMUS
 EEKTŘINA A MAGNETIZMUS XII Střídavé obvody Obsah STŘÍDAÉ OBODY ZDOJE STŘÍDAÉHO NAPĚTÍ JEDNODUHÉ STŘÍDAÉ OBODY EZISTO JAKO ZÁTĚŽ 3 ÍKA JAKO ZÁTĚŽ 5 3 KONDENZÁTO JAKO ZÁTĚŽ 6 3 SÉIOÝ OBOD 7 3 IMPEDANE 3
EEKTŘINA A MAGNETIZMUS XII Střídavé obvody Obsah STŘÍDAÉ OBODY ZDOJE STŘÍDAÉHO NAPĚTÍ JEDNODUHÉ STŘÍDAÉ OBODY EZISTO JAKO ZÁTĚŽ 3 ÍKA JAKO ZÁTĚŽ 5 3 KONDENZÁTO JAKO ZÁTĚŽ 6 3 SÉIOÝ OBOD 7 3 IMPEDANE 3
GENERÁTOR NEHARMONICKÝCH PRŮBĚHU 303-4R 9.2. 16.2. 8
 Vyšší odborná škola a Střední průmyslová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy GENERÁTOR NEHARMONICKÝCH PRŮBĚHU Číslo úlohy 303-4R Zadání 1. Dle
Vyšší odborná škola a Střední průmyslová škola elektrotechnická Božetěchova 3, Olomouc Laboratoře elektrotechnických měření Název úlohy GENERÁTOR NEHARMONICKÝCH PRŮBĚHU Číslo úlohy 303-4R Zadání 1. Dle
Část 3. Literatura : Otakar Maštovský; HYDROMECHANIKA Jaromír Noskijevič, MECHANIKA TEKUTIN František Šob; HYDROMECHANIKA
 HYDROMECHANIKA HYDROSTATIKA základní zákon hdrostatik Část 3 Literatura : Otakar Maštovský; HYDROMECHANIKA Jaromír Noskijevič, MECHANIKA TEKUTIN František Šob; HYDROMECHANIKA Hdrostatika - obsah Základn
HYDROMECHANIKA HYDROSTATIKA základní zákon hdrostatik Část 3 Literatura : Otakar Maštovský; HYDROMECHANIKA Jaromír Noskijevič, MECHANIKA TEKUTIN František Šob; HYDROMECHANIKA Hdrostatika - obsah Základn
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU. Ing. Aleš Hrdlička
 VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
VYUŽITÍ MATLABU PŘI NÁVRHU FUZZY LOGICKÉHO REGULÁTORU Ing. Aleš Hrdlička Katedra technické kybernetiky a vojenké robotiky Vojenká akademie v Brně E-mail: hrdlicka@c.vabo.cz Úvod Tento článek popiuje jednoduchou
Příklady k přednášce 13 - Návrh frekvenčními metodami
 Příklady k přednášce 13 - Návrh frekvenčními metodami Michael Šebek Automatické řízení 2015 30-3-15 Nastavení šířky pásma uzavřené smyčky Na přechodové frekvenci v otevřené smyčce je (z definice) Hodnota
Příklady k přednášce 13 - Návrh frekvenčními metodami Michael Šebek Automatické řízení 2015 30-3-15 Nastavení šířky pásma uzavřené smyčky Na přechodové frekvenci v otevřené smyčce je (z definice) Hodnota
Nespojité (dvou- a třípolohové ) regulátory
 regulátory") Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
NÍZKOFREKVENČNÍ ZESILOVAČ S OZ
 NÍZKOFREKVENČNÍ ZESILOVAČ S OZ 204-4R. Navrhněte a sestavte neinvertující nf zesilovač s OZ : 74 CN, pro napěťový přenos a u 20 db (0 x zesílení) při napájecím napětí cc ± 5 V a zatěžovacím odporu R L
NÍZKOFREKVENČNÍ ZESILOVAČ S OZ 204-4R. Navrhněte a sestavte neinvertující nf zesilovač s OZ : 74 CN, pro napěťový přenos a u 20 db (0 x zesílení) při napájecím napětí cc ± 5 V a zatěžovacím odporu R L
ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU
 ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU J. Novák, P. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán software pro počítačovou simulaci
ANALÝZA MĚŘENÍ TVARU VLNOPLOCHY V OPTICE POMOCÍ MATLABU J. Novák, P. Novák Katedra fyziky, Fakulta stavební, České vysoké učení technické v Praze Abstrakt V práci je popsán software pro počítačovou simulaci
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Vedení tepla v MKP. Konstantní tepelné toky. Analogické úlohám statiky v mechanice kontinua
 Vedení tepla v MKP Stacionární úlohy (viz dále) Konstantní tepelné toky Analogické úlohám statiky v mechanice kontinua Nestacionární úlohy (analogické dynamice stavebních konstrukcí) 1 Základní rovnice
Vedení tepla v MKP Stacionární úlohy (viz dále) Konstantní tepelné toky Analogické úlohám statiky v mechanice kontinua Nestacionární úlohy (analogické dynamice stavebních konstrukcí) 1 Základní rovnice
Doplňky k přednášce 23 Diskrétní systémy Diskrétní frekvenční charakteristiky
 Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Kružnice, kruh, tečny, obsahy, goniometrické funkce, integrace
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Kružnice, kruh, tečny, obsahy, goniometrické funkce, integrace
Měřicí a řídicí technika Bakalářské studium 2007/2008. odezva. odhad chování procesu. formální matematický vztah s neznámými parametry
 MODELOVÁNÍ základní pojmy a postupy principy vytváření deterministických matematických modelů vybrané základní vztahy používané při vytváření matematických modelů ukázkové příklady Základní pojmy matematický
MODELOVÁNÍ základní pojmy a postupy principy vytváření deterministických matematických modelů vybrané základní vztahy používané při vytváření matematických modelů ukázkové příklady Základní pojmy matematický
Euklidovský prostor Stručnější verze
 [1] Euklidovský prostor Stručnější verze definice Eulidovského prostoru kartézský souřadnicový systém vektorový součin v E 3 vlastnosti přímek a rovin v E 3 a) eprostor-v2, 16, b) P. Olšák, FEL ČVUT, c)
[1] Euklidovský prostor Stručnější verze definice Eulidovského prostoru kartézský souřadnicový systém vektorový součin v E 3 vlastnosti přímek a rovin v E 3 a) eprostor-v2, 16, b) P. Olšák, FEL ČVUT, c)
PRAKTIKUM I. Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. úlohač.8 Název: Kalibrace odporového teploměru a termočlánku- fázové přechody Pracoval: Lukáš Ledvina stud.skup.17 24.3.2009
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK PRAKTIKUM I. úlohač.8 Název: Kalibrace odporového teploměru a termočlánku- fázové přechody Pracoval: Lukáš Ledvina stud.skup.17 24.3.2009
Seznámení s přístroji, používanými při měření. Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice
 Cvičení Seznámení s přístroji, používanými při měření Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice eaktance kapacitoru Integrační článek C - přenos - měření a simulace Derivační
Cvičení Seznámení s přístroji, používanými při měření Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice eaktance kapacitoru Integrační článek C - přenos - měření a simulace Derivační
( x) ( ) ( ) { } Vzorce pro dvojnásobný úhel II. Předpoklady: Urči definiční obor výrazů a zjednoduš je. 2. x x x
 ( ) ( ) { } Vzorce pro dvojnásobný úhel II. Předpoklady: Urči definiční obor výrazů a zjednoduš je. 2. x x x") 9 Vzorce pro dvojnásobný úhel II Předpoklady: 08 Př : Urči definiční obor výrazů a zjednoduš je a) ( sin cos ) sin x + cos x sin x x + x sin x b) cos x + cos x + sin x + cos x sin x a) x R sin x + cos
9 Vzorce pro dvojnásobný úhel II Předpoklady: 08 Př : Urči definiční obor výrazů a zjednoduš je a) ( sin cos ) sin x + cos x sin x x + x sin x b) cos x + cos x + sin x + cos x sin x a) x R sin x + cos
Praktikum II Elektřina a magnetismus
 Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum II Elektřina a magnetismus Úloha č. XI Název: Charakteristiky diod Pracoval: Matyáš Řehák stud.sk.: 13 dne: 17.10.2008 Odevzdal
Oddělení fyzikálních praktik při Kabinetu výuky obecné fyziky MFF UK Praktikum II Elektřina a magnetismus Úloha č. XI Název: Charakteristiky diod Pracoval: Matyáš Řehák stud.sk.: 13 dne: 17.10.2008 Odevzdal
(Auto)korelační funkce. 2. 11. 2015 Statistické vyhodnocování exp. dat M. Čada www.fzu.cz/ ~ cada
korelační funkce. 2. 11. 2015 Statistické vyhodnocování exp. dat M. Čada www.fzu.cz/ ~ cada") (Auto)korelační funkce 1 Náhodné procesy Korelace mezi náhodnými proměnnými má široké uplatnění v elektrotechnické praxi, kde se snažíme o porovnávání dvou signálů, které by měly být stejné. Příkladem
(Auto)korelační funkce 1 Náhodné procesy Korelace mezi náhodnými proměnnými má široké uplatnění v elektrotechnické praxi, kde se snažíme o porovnávání dvou signálů, které by měly být stejné. Příkladem
Příklad 1.3: Mocnina matice
 Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
9 Impedanční přizpůsobení
 9 Impedanční přizpůsobení Impedančním přizpůsobením rozumíme situaci, při níž činitelé odrazu zátěže ΓL a zdroje (generátoru) Γs jsou komplexně sdruženy. Za této situace nedochází ke vzniku stojatého vlnění.
9 Impedanční přizpůsobení Impedančním přizpůsobením rozumíme situaci, při níž činitelé odrazu zátěže ΓL a zdroje (generátoru) Γs jsou komplexně sdruženy. Za této situace nedochází ke vzniku stojatého vlnění.
POŽADAVKY NA REGULACI
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V RAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Základy řízení systémů cvičení 5 OŽADAVKY NA REGULACI etr Hušek (husek@control.felk.cvut.cz) Základními požadavky
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V RAZE, FAKULTA ELEKTROTECHNICKÁ, KATEDRA ŘÍDICÍ TECHNIKY Základy řízení systémů cvičení 5 OŽADAVKY NA REGULACI etr Hušek (husek@control.felk.cvut.cz) Základními požadavky
MATEMATIKA IV - PARCIÁLNÍ DIFERENCIÁLNÍ ROVNICE - ZÁPISKY Z. Obsah. 1. Parciální diferenciální rovnice obecně. 2. Kvaazilineární rovnice prvního řádu
 MATEMATIKA IV - PARCIÁLNÍ DIFERENCIÁLNÍ ROVNICE - ZÁPISKY Z PŘEDNÁŠEK JAN MALÝ Obsah 1. Parciální diferenciální rovnice obecně 1. Kvaazilineární rovnice prvního řádu 1 3. Lineární rovnice druhého řádu
MATEMATIKA IV - PARCIÁLNÍ DIFERENCIÁLNÍ ROVNICE - ZÁPISKY Z PŘEDNÁŠEK JAN MALÝ Obsah 1. Parciální diferenciální rovnice obecně 1. Kvaazilineární rovnice prvního řádu 1 3. Lineární rovnice druhého řádu
PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA V ČESKÝCH BUDĚJOVICÍCH, DUKELSKÁ 13 PROTOKOL O LABORATORNÍM CVIČENÍ - AUTOMATIZACE Provedl: Tomáš PRŮCHA Datum: 23. 1. 2009 Číslo: Kontroloval: Datum: 4 Pořadové číslo žáka: 24
Exponenciální rovnice. Metoda převedení na stejný základ. Cvičení 1. Příklad 1.
 Eponenciální rovnice Eponenciální rovnice jsou rovnice, ve kterých se neznámá vsktuje v eponentu. Řešíme je v závislosti na tpu rovnice několika základními metodami. A. Metoda převedení na stejný základ
Eponenciální rovnice Eponenciální rovnice jsou rovnice, ve kterých se neznámá vsktuje v eponentu. Řešíme je v závislosti na tpu rovnice několika základními metodami. A. Metoda převedení na stejný základ
i ma Teorie: Měření budeme provádět podle obr. 1. Obr. 1
 117 Pomůcky: Systém ISES, moduly: ampérmetr, capacity-meter, kondenzátor na destičce, regulovatelný zdroj elektrického napětí (např. PS 32A), přepínač, sada rezistorů, 6 spojovacích vodičů, soubory: vybij1.imc,
117 Pomůcky: Systém ISES, moduly: ampérmetr, capacity-meter, kondenzátor na destičce, regulovatelný zdroj elektrického napětí (např. PS 32A), přepínač, sada rezistorů, 6 spojovacích vodičů, soubory: vybij1.imc,
24 - Diskrétní řízení
 24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
ALGORITMY ŘÍZENÍ TOPNÉHO ČLÁNKU TEPELNÉHO HMOTNOSTNÍHO PRŮTOKOMĚRU
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV AUTOMATIZACE A MĚŘICÍ TECHNIKY FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION
Robustnost regulátorů PI a PID
 Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS
Proceedings of International Scientific Conference of FME Session 4: Automation Control and Applied Informatics Paper 45 Robustnost regulátorů PI a PID VÍTEČKOVÁ, Miluše Doc. Ing., CSc., katedra ATŘ, FS