LINEÁRNÍ PERSPEKTIVA
|
|
|
- Jaromír Zeman
- před 9 lety
- Počet zobrazení:
Transkript
1 LINEÁRNÍ PERSPEKTIVA Lineární perspektiva je významnou aplikací středového promítání. V technické praxi se používá především k zobrazování objektů větších rozměrů, napodobuje tak lidské vidění. Ze středu promítání (oka) se objekty promítají do roviny (nahrazuje sítnici). Perspektivní obrazy jsou například fotografie. Abychom dostali názorný obraz odpovídající tomu, co vidí lidské oko, je třeba zavést na středové promítání jisté omezující podmínky. 1. Pozorovaný objekt leží uvnitř rotační kuželové plochy, která má vrchol ve středu promítání, osu kolmou k průmětně a vrcholový úhel v rozmezí Tato kuželová plocha se nazývá zorné pole (zorná kuželová plocha). Průmětnu protíná v zorné kružnici kz o středu v hlavním bodě a její poloměr je maximálně r = d tg25 (přibližně d/2) a jelikož objekt leží v zorném poli, tak průmět objektu leží uvnitř zorné kružnice. Dále označíme-li n největší průčelný rozměr objektu a v vzdálenost objektu od střed promítání, pak n<v<3n. První nerovnost plyne z toho, že objekt leží v zorném poli. Kdyby neplatila druhá nerovnost, byl by pozorovatel od objektu příliš daleko a průmět by se blížil rovnoběžnému promítání. 2. Pozorovatel je od objektu vzdálen aspoň 21 cm (mez zřetelného vidění). 3. Je dána pevná vodorovná rovina π, na které leží pozorovaný předmět a většinou i pozorovatel. Středové promítání, které splňuje podmínky 1, 2, 3 se nazývá lineární perspektiva. Zavedeme následující označení: Průmětna ρ - většinou svislá, oko S - střed promítání, hlavní bod H - pravoúhlý průmět S do ρ, distance d - velikost úsečky SH, osa perspektivy s - přímka SH, základní rovina π - pomocná rovina z podmínky 3, základnice z - průsečnice ρ a π, stanoviště S1 - pravoúhlý průmět S do π, obzorová rovina π - směrová rovina roviny π, horizont h - průsečnice π a ρ, hlavní vertikála v - přímka v ρ procházející H kolmo k z, základní bod Z - průsečík v a z, výška perspektivy - vzdálenost z od h, levý, pravý resp. horní, dolní distančník Dl, Dp, Dh, Dd - průsečíky distanční kružnice s h resp. v, hloubkové přímky - přímky kolmé k ρ, středový průmět bodu A do ρ označíme As a budeme ho nazývat perspektivou bodu A. Středový průmět bodu A1 (pravoúhlý průmět A do π) označíme A1s a nazveme ho perspektiva půdorysu. (Nezaměňovat s půdorysem perspektivy!) Daný objekt můžeme perspektivně zobrazit buď s využitím jiné zobrazovací metody, pak se lineární perspektiva nazývá vázáná, nebo jen s využitím metod středového promítání, pak se perspektiva nazývá volná. Vázaná perspektiva (nepřímé metody) Historicky nejstarší nepřímou metodou je průsečná metoda. Objekt je zadán pomocí Mongeovy projekce a perspektiva objektu se sestrojuje rovněž využitím prostředků Mongeovy projekce. Daný objekt je postaven na π, perspektiva je dána průmětnou ρ, okem a základní rovinou, kterou je půdorysna. Průmětnu volíme podle toho, která část objektu má být viditelná. Oko S volíme tak, aby půdorys osy s ležel uvnitř ostrého úhlu daného styčnými přímkami vedenými z S1 k půdorysu objektu. Výška perspektivy by měla odpovídat výšce pozorovatele a vzdálenost oka od objektu je větší než největší průčelný rozměr objektu. Perspektivní obraz objektu tvoří perspektivy všech jeho bodů, tj. středové průměty z S do ρ. Průmětnu ρ přemístíme (není rovnoběžná s π ani ν, proto žádný pravoúhlý průmět perspektivy nesplývá s perspektivou). V nákresně zvolíme horizont h a hlavní bod H na h, rovinu ρ pak přemístíme tak, aby horizont resp. hlavní bod přešel do zvolené přímky resp. bodu. Středový průmět bodu A z S do roviny ρ označíme As. Dále označme Ā průsečík první promítací přímky bodu As s horizontem h. Vzhledem k poloze první promítací přímky a horizontu vzhledem k průmětnám platí IH1A 1I=IHA I, IA 2As2I=IA AsI. Odtud vyplývá i konstrukce perspektivy. Sestrojíme na h bod A tak, aby platilo IH1A 1I=IHA I (zachováme orientaci) a na kolmici k h v bodě A sestrojíme bod As tak, aby IA 2As2I=IA AsI. Další body sestrojíme stejně. Ke konstrukci můžeme také využít úběžníků přímek rovnoběžných s π. (Úběžníky přímek rovnoběžných s π leží na horizontu.) Sestrojíme 1

2 například úběžníky 1U, 2U přímek AB, BC a při konstrukci perspektiv dalších bodů můžeme využít toho, že středové průměty navzájem rovnoběžných přímek mají společný úběžník. Další nepřímou metodou je stopníková metoda. Opět vycházíme z Mongeovy projekce, ovšem tentokrát volíme objekt vzhledem k soustavě souřadnic tak, aby půdorys byl nad osou x a nárys pod osou x. Objekt stojí na základní rovině (tentokrát ji označíme ξ) rovnoběžné s π. Průmětnu 2
 rovnoběžné s π.")
3 ρ ztotožníme s nárysnou, perspektiva tedy tentokrát splyne se svým nárysem. Dále zvolíme oko S a horizont h, výška perspektivy by opět měla odpovídat výšce pozorovatele. Aby se nepřekrýval nárys objektu v Mongeově projekci s perspektivou, posuneme nárys ve směru osy x a otočíme do průčelné polohy. Nárys a půdorys si sice neodpovídají v Mongeově projekci, ale pro konstrukce má nárys jen pomocnou roli. Půdorys objektu umístíme tak, aby úběžník aspoň jednoho směru ležel v nákresně. (Například úběžník Ua přímky a= AB.) Sestrojíme hlavní bod a úběžníky některých vodorovných přímek. Sestrojíme perspektivu bodu A. Bod A leží na vodorovné přímce a, její nárys je rovnoběžný s osou x. Určíme nárysný stopník Na přímky a. Na leží v ν (tedy i v ρ) a splývá se středovým průmětem. Perspektiva as přímky a je přímka Uas Na. Na ní leží perspektiva bodu A. Tu sestrojíme takto. Promítneme bod A z S do ρ, půdorys As1 perspektivy As leží na ose x, a protože nárys perspektivy splývá s perspektivou leží As na ordinále a na přímce as. Další body doplňujeme stejně, pokud máme na nákresně úběžníky dalších přímek, můžeme využít i jich. Pro konstrukci složitějších půdorysů můžeme využít další nepřímou metodu a to tzv. incidenční měřítko. Tato metoda využívá Pappovy věty (dvojpoměr se středovým promítáním zachovává). Objekt uzavřeme do kvádru a do jeho stěn pravoúhle objekt promítneme. Kvádr je dán nárysem a bokorysem libovolně v průmětně. Bod X objektu nejprve pravoúhle promítneme do bodu IX ležícího ve stěně ABFE a do bodu IIX ležícího ve stěně BCGF. Bod IX pravoúhle promítneme do bodu X1 na přímce AB a do bodu X2 na přímce BF. Bod IIX pravoúhle promítneme do bodu X3 na přímce BC. Sestrojíme perspektivu kvádru pomocí některé nám zatím známé metody. (V obrázku není znázorněno.) Sestrojíme vhodně přímky A B, B F, B C, které jsou po řadě projektivní a AB, BF, BC, tak, aby platilo IA B I=IAsBsI atd. Víme, že projektivita je dána třemi odpovídajícími si páry bodů, sestrojíme proto ještě perspektivy středů P, R, Q úseček AB, BF, BC. (Například pomocí úhlopříček). Můžeme sestrojit bod X odpovídající v dané projektivitě bodu X1, bod X odpovídající bodu X2 i bod X odpovídající bodu X3. (Projektivity v obrázku jsou doplňovány užitím direkční osy, průsečíky přímek AB a A B, BP a B P atd. leží na direkční ose.) Protože platí Pappova věta, platí IAsX1sI=IA X I atd. a na perspektivě hran kvádru získáme perspektivy bodů Xi. Body Xi jsme získali pravoúhlým promítáním bodu X do stěn a hran kvádru a jelikož známe úběžníky hran můžeme sestrojit perspektivu bodu X. 3
 Sestrojíme hlavní bod a úběžníky některých vodorovných přímek. Sestrojíme perspektivu bodu A. Bod A leží na vodorovné přímce a, její nárys je rovnoběžný s osou x.")
4 Nepřímé metody se používají především v případech, když známe sdružené průměty objektu. Neznáme-li je podrobně a chceme-li perspektivní obraz průběžně doplňovat, opravovat apod., používáme přímé metody. 4

5 Volná perspektiva (přímé metody) Volná perspektiva využívá středového promítání (přizpůsobenému podmínkám 1, 2, 3) a jeho vlastností ke konstrukcím perspektiv objektů. Některé konstrukce středového promítání jsou přizpůsobeny. Často je třeba nanést úsečku dané délky na danou přímku (většinou horizontální nebo vertikální). Ze středového promítání známe konstrukci pro určení skutečné velikosti úsečky, tuto konstrukci aplikujeme na lineární perspektivu. Nejprve určíme skutečnou velikost úsečky ležící v základní rovině π. Úběžníky všech přímek rovnoběžných s π leží na horizontu, stopníky na základnici. Mohou nastat dva případy. Přímka, na níž úsečka leží, je rovnoběžná se základnicí z a její úběžník a stopník je nevlastní, nebo úběžník přímky je vlastní. Nejprve určíme skutečnou velikost úsečky rovnoběžné se základnicí z. Jestliže je úsečka rovnoběžná se z, je rovnoběžná i s průmětnou ρ, proto velikost pravoúhlého průmětu úsečky AB do ρ je skutečnou velikostí úsečky AB. Pravoúhle promítací přímky do ρ jsou hloubkové přímky, jejich úběžník je hlavní bod. Promítneme-li z H body As, Bs na základnici do bodů A2, B2, je úsečka A2B2 pravoúhlým průmětem AB do ρ. Nechť U je libovolný bod ležící na horizontu h. Promítneme-li z U body As, Bs na z do bodů A, B (v prostoru promítáme AB na z přímkami směru US), je zřejmé, že IA B I=IA2B2I=IABI. (viz obr.4) Jestliže není úsečka AB rovnoběžná se z, je úběžník au přímky a=ab vlastní a použijeme upravenou konstrukci pomocí dělicí kružnice. Perspektivu máme zadánu některým z distančníků, předpokládejme např. dolním distančníkem Dd. Středový průmět směrové přímky a přímky a je horizont h, sklopíme a (známe-li Dd je (a )=audd ). Kružnice se sředem Ua a poloměr IaUDdI je dělicí kružnice. Na ní nebudeme vybírat libovolný bod, ale zvolíme jeden její průsečík s horizontem. Označíme jej Da a nazýváme jej dělicí bod přímky a. Spojnice bodu Da a U je horizont, rovnoběžka vedená stopníkem je základnice. Promítneme-li z Da body AsBs na základnicí do bodů A B je tedy IABI=IA B I. (viz obr.5) Sestrojíme čtverec v základní rovině π se středem O a vrcholem A, perspektiva je dána horizontem, základnicí a dolním distančníkem. K sestrojení můžeme buď využít otočení π do průmětny (konstrukce pomocí kolineace, kterou známe ze středového promítání), nebo nanášení úseček dané délky podle předchozího. Pomocí otočení: Nejprve sestrojíme střed kolineace S0 (otočením směrové roviny π do průmětny). Stopa roviny π je základnice z, úběžnice je horizont h, kolineace je tedy dána středem S0, osou z, a úběžnicí h. Sestrojíme body A0, O0 (obrazy As, Os v dané kolineaci), doplníme na čtverec a určíme kolineární obrazy zbývajících bodů. (viz obr.6) 5

6 Jiná konstrukce: Přímka a=oa leží v π, její úběžník Ua je průsečík as s h. Určíme dělicí bod přímky a, z něj promítneme As a Os do bodů A a O na základnici. Určili jsme velikost poloviny úhlopříčky, sestrojíme C (souměrný podle O s A ), z Da jej promítneme zpět na as do bodu Cs. Přímka b=ob je kolmá na a, její úběžník určíme sklopením směrové roviny π do průmětny (platí - (a ) je kolmá na (b ) a a =UaDd, b =UbDd.) Na přímce b sestrojíme(stejnou konstrukcí) body B, D tak, aby platilo IDOI=IBOI=IAOI=ICOI. (viz obr.7) Leží-li úsečka na svislé přímce, je rovnoběžná s průmětnou a velikost úsečky je rovna velikosti pravoúhlého průmětu. Mějme dánu úsečku AB ležící na svislé přímce a. Pravoúhlé a středové průměty bodů leží na ordinále. Předpokládejme, že známe (příp. sestrojíme) průsečík P přímky a se základní rovinou π. P2 pak leží na z a na ordinále (tj. na přímce PsH). Protože je a kolmá k π, je a2 rovnoběžná s as. Určíme A2B2 a získali jsme skutečnou velikost úsečky AB. Je zřejmé, že pokud vybereme libovolný bod U na horizontu, z něj promítneme P do P na základnici, sestrojíme přímku a rovnoběžnou s as a na ni promítneme z U body A, B do bodů A, B, pak platí IABI=IA2B2I=IA B I. (viz obr.8) 6
 Na přímce b sestrojíme(stejnou konstrukcí) body B, D tak, aby platilo IDOI=IBOI=IAOI=ICOI. (viz obr.")
7 Pomocí předchozích konstrukcí určujeme skutečnou velikost úsečky AB ležící na obecné přímce a. Máme dán perspektivní průmět as přímky a a perspektivu půdorysu a1s. a1s leží v π, pomocí dělicího bodu určíme skutečnou velikost úsečky A1B1 (pravoúhlý průmět AB do a1.). Určíme velikost úseček AA1, BB1 (například promítnutím z bodu a1u). Sestrojíme ve skutečné velikosti lichoběžník AA1B1B a máme skutečnou velikost úsečky AB. (viz obr.9) Redukce distance Abychom pro perspektivní obraz využili co největší část nákresny, je třeba volit větší distanci a pak vychází distančníky i dělicí body mimo nákresnu. Tento problém řešíme pomocí tzv. redukce distance. V prostoru uvažujeme stejnolehlost se středem H a koeficientem k (aby metoda měla požadovaný efekt je k větší než nula a menší než 1). V této stejnolehlosti se střed promítání S zobrazí do bodu Sk, bod A do bodu Ak a středový průmět As bodu A se zobrazí do Ask. (viz obr.10) Z vlastností stejnolehlosti je zřejmé, že Askje také průmět bodu Ak do průmětny ρ z bodu Sk. Této metody využíváme především pro konstrukci perspektiv půdorysů objektů. Řešíme například takovéto úlohy: Na přímku a ležící v π naneste od bodu A úsečku dané velikosti v, úběžník aus přímky a leží mimo nákresnu. Zvolíme vhodnou stejnolehlost, např. s koeficientem 1/3, střed je H. Sestrojíme obraz daných objektů v této stejnolehlosti (základnici z1/3, přímku a1/3). Pro přímku a1/3 sestrojíme dělicí bod a naneseme pomocí něj na přímku a1/3 od bodu A1/3 úsečku délky v1/3. Její druhý 7
 Redukce distance Abychom pro perspektivní obraz využili co největší část nákresny, je třeba volit větší distanci a pak vychází distančníky i dělicí body mimo nákresnu.")
8 koncový bod B1/3 zobrazíme ve stejnolehlosti do bodu Bs na přímku as, úsečka AB má požadovanou délku v. (viz obr.11) Metodu redukce distance užíváme většinou pro konstrukci dělicích bodů a pomocí nich pak konstrukci provádíme v původní perspektivě. Například jako v této úloze: Sestrojte perspektivu krychle, jejíž stěna ABCD leží v π, jsou-li dány vrcholy A, B, perspektiva je dána horizontem, základnicí a distancí. Užijeme například redukce s koeficientem 1/4 a určíme například horní distančník Dh1/4. Pro přímku a=ab známe úběžník au, sestrojíme přímku a1/4, její úběžník i dělicí bod a body A1/4, B1/4. Sklopením obzorové roviny π určíme úběžník přímky b1/4, která prochází bodem A1/4 a je kolmá na přímku a1/4. Na ní určíme bod D1/4 (vrchol čtverce). Sestrojíme přímku busas (rovnoběžná s bus1/4as1/4) a přímku busbs (rovnoběžná sbus1/4bs1/4). Sestrojíme bod Ds na as (pomocí stejnolehlosti). Bod C je průsečíkem přímek DC a BC, DC je rovnoběžná s AB (mají společný úběžník). Užitím redukce distance jsme sestrojili stěnu krychle ležící v π, hrany kolmé k π sestrojíme už v původní perspektivě. Hranu AsEs promítneme například z bodu aus do úsečky A E (platí IA E I= 4IA 1/4B 1/4I). Protože úběžník přímky AD je nedostupný, je třeba ještě nanést velikost hrany krychle na některou další svislou přímku (například procházející bodem C, na obrázku je sestrojen bod G, hrana CG se promítá z průsečíku AC s horizontem.) (viz obr.12) 8

9 Metoda hloubkových přímek Aplikujeme-li metodu redukce distance na hloubkové přímky, konstrukce se zjednoduší. Předpokládejme, že a je hloubková přímka, Na její stopník, A její další bod. Perspektiva je dána horizontem, základnicí a levým distančníkem. Zvolme stejnolehlost se středem H a koeficientem k. Dl se zobrazí do Dlk, as prochází středem, je slabě samodružná. Sestrojme přímku DlkAs a označme A k její průsečík se z. A je průsečík DlAs se z (úsečka NaA určuje skutečnou velikost úsečky NaA). (viz obr.13) Trojúhelníky NaA kas a HDlkAs a trojúhelníky NaA As a HDlAs jsou podobné. Platí tedy IHDlI=kIHDlkI a proto také INaA I=kINaA ki. Na hloubkovou přímku lze tedy úsečku dané délky nanášet z redukovaného distančníku. Chceme-li úsečku délky v, od daného bodu B, promítneme Bs z redukovaného distančníku do B na základnici, naneseme úsečku délky v.k a koncový bod promítneme zpět. Z uvedeného zjednodušení pro hloubkové přímky je pak uvedena další metoda pro nanášení úsečky dané délky na přímku ležící v π, tzv. metoda hloubkových přímek. Nechť p je přímka ležící v π, A, B dva její body. Body A, B vedeme hloubkové přímky a, b a sestrojíme perspektivy přímek i bodů. Označme p směrovou přímku přímky p, pu úběžník přímky p, Na, Nb po řadě stopníky přímek a, b. Trojúhelníky NpNaA, NpNbB, pushs jsou podobné. (viz obr.14) Perspektivu mějme dánu horizontem, základnicí a dolním distančníkem. Platí IpUsSI=IpUsDdI, z podobnosti trojúhelníků máme IABI:INaNbI=IpUsSI:IpUsHI a tedy také IABI:INaNbI=IpUsDdI:IpUsHI. Sestrojíme trojúhelník HRQ podobný trojúhelníku HpUsDd tak, aby platilo INaNbI=IHRI. Pak také bude platí IRQI=IABI. (Známe-li body A, B a hledáme skutečnou velikost úsečky AB je konstrukce trojúhelníku HRQ triviální, nanášíme-li od bodu A úsečku dané délky v, musíme sestrojit pravoúhlý trojúhelník HRQ, známe-li pravý úhel a velikost přepony.) (viz obr.15) 9
 Trojúhelníky NaA kas a HDlkAs a trojúhelníky NaA As a HDlAs jsou podobné. Platí tedy IHDlI=kIHDlkI a proto také INaA I=kINaA ki.")
10 Perspektiva složitějších půdorysů Pro složitější půdorysy jsou někdy uvedené metody příliš náročné, proto se používá tzv. gratikoláže. Půdorys pokryjeme dostatečně hustou čtvercovou sítí (viz obr.16) a sestrojí se perspektiva této sítě. Perspektiva půdorysu se pak určuje bodově. Body půdorysu pak můžeme promítat například hloubkovými přímkami na průčelné přímky sítě (bod A), promítnutím průčelnou přímkou na hloubkovou přímku (případně na úhlopříčku a poté hloubkovou přímkou na průčelnou, bod B), případně kombinací těchto metod. (viz obr.17) 10
, promítnutím průčelnou přímkou na")
11 Osvětlení a zrcadlení v perspektivě Pro zvětšení názornosti perspektivního obrazu používáme rovnoběžného osvětlení nebo zrcadlení. Rovnoběžné osvětlení je dáno směrem s, uvažujme ještě pravoúhlý průmět s1 směru s do základní roviny π. Úběžníky přímek směrů s a s1 po řadě označíme Rs a R1s. (Je zřejmé, že R1s leží na h a přímka RsR1s je kolmá na h.). sestrojujeme-li vržený stín A bodu A do π, vedeme bodem A přímku směru s a určíme její průsečík s π, tzn., že A je průsečík přímek směrů s a s1 vedených body A a A1. Pro perspektivní průměty je tedy A s průsečík přímek AsRs a A1sR1s. (viz obr.18) Na obrázku (obr.19) je sestrojeno osvětlení jednoduchého útvaru, stínu vržené na sebe se jako vždy určí pomocí zpětných paprsků. Konstrukce je obdobná jako u rovnoběžných projekcí, pouze navzájem rovnoběžné přímky prochází jedním úběžníkem. Zrcadlení se používá nejčastěji podle vodorovné roviny (vodní hladina). Využíváme známé vlastnosti světelných paprsků, úhel dopadu paprsků jdoucích od předmětu do oka se rovná úhlu odrazu, tedy kromě bodu A vidíme z oka S také bod Az souměrně sdružený s bodem A podle roviny zrcadla (nejčastěji π). Tj. platí IAA1I=IA1AzI, IAsA1sI=IA1sAzsI. Označíme-li Sz bod souměrně sdružený s okem S podle roviny zrcadla a P průsečík přímky ASz s rovinou zrcadla, pak perspektivní průmět Ps bodu P splývá s perspektivním průmětem Azs zrcadleného bodu Az. (viz obr.20) 11
 Na obrázku (obr.")
12 12

13 Na obrázku je zobrazen kvádr stojící na π a jeho zrcadlení ve vodní hladině (část roviny π). Zobrazujeme jen viditelné části. Průčelná (jednoúběžníková) perspektiva Mějme dán objekt, jehož perspektivu chceme sestrojit a zvolme pravoúhlý souřadnicový systém s osami 1x, 2x, 3x, které jsou rovnoběžné s hranami daného objektu. (Daný objekt můžeme také, podobně jako při použití incidenčního měřítka, obalit vhodným kvádrem, souřadnicové osy pak budou splývat s hranami kvádru.) Perspektiva je dána horizontem, základnicí a některým z distančníků. Osy označme tak, aby 1 x, 2x ležely v základní rovině. Takto zvolený souřadnicový systém nazýváme přidružený k danému objektu. Protože průmětna ρ je zatím volena tak, 13
 Perspektiva je dána horizontem, základnicí a některým z distančníků. Osy označme tak, aby 1 x, 2x ležely v základní rovině.")
14 aby byla kolmá k základní rovině π, je osa 3x rovnoběžná sρ. Je-li s ρ rovnoběžná i další z os (např. 1 x), pak je objekt v průčelné poloze a zobrazujeme jej v tzv. průčelné perspektivě. Pouze osa 2x má vlastní úběžník (je hloubková přímka, úběžník je H), proto je tato perspektiva také nazývána jednoúběžníková. Souřadný systém vytvoří čtvercové sítě, sestrojíme perspektivu některých těchto sítí. Průčelná perspektiva se používá nejčastěji pro zobrazování interiérů v bytové architektuře, sestrojujeme sítě ve třech vhodných rovinách (podlaha a dvě protější stěny kolmé k ρ.) Osu 1x ztotožníme se základnicí z (leží v ρ, jednotky na ni nanášíme ve skutečné velikosti), osu 3x vedeme libovolným vhodně zvoleným bodem P na z (leží rovněž v ρ, jednotky ve skutečné velikosti.) Osa 2x je hloubková přímka, její perspektiva je přímka PH. (Jednotky na ni nanášíme pomocí levého nebo pravého distančníku.) Sestrojíme sítě (jednotkami na osách vedeme rovnoběžky se zbývajícími osami) a s využitím sítí zakreslíme inteiér. Nárožní (dvojúběžníková) perspektiva Zobrazovanému objektu opět přiřadíme přidružený souřadnicový systém tak, aby osa 3x byla rovnoběžná s průmětnou ρ. Osy 1x a 2x leží v π, ovšem žádná není rovnoběžná s ρ. Objekt je v nárožní poloze a zobrazujeme jej v tzv. nárožní perspektivě. Protože osy 1x a 2x mají úběžníky 1U, 2U nazýváme někdy tuto perspektivu dvojúběžníková. Zobrazujeme opět čtvercové sítě vhodných rovin a pomocí nich sestrojujeme perspektivu objektu. Nárožní perspektiva se používá především pro zobrazování budov, ulic, komunikací apod. (rozsáhlejší objekty). Protože pozorovatel a objekt stojí na základní rovině, půdorys objektu je vidět pod malým úhlem a tedy velmi zkresleně a při konstrukcích může docházet k větším nepřesnostem. Pro konstrukci čtvercové sítě v půdorysu (a tím i celého půdorysu) používáme tzv. sníženého (sklepního) půdorysu. Zvolíme pomocnou rovinu 1π rovnoběžnou s π ("pod" rovinou π) a půdorys pravoúhle promítneme do 1π. Je zřejmé, že perspektiva původního půdorysu a sníženého půdorysu si odpovídají v pravoúhlé afinitě s osou h. Při konstrukci perspektivy objektu sestrojíme perspektivu sníženého půdorysu (čtvercovou síť) a dále čtvercové sítě dané např. rovinami (1x3x) a (2x3x). Zvolíme bod P na z a osu 3x procházející P. (Jednotky na ní budou opět ve skutečné velikosti) Osy 1x a 2x budou procházet bodem P, jejich perspektivy budou přímky P1U, P2U, kde 1U, 2U jsou os 1 x, 2x, jeden zvolíme, druhý sestrojíme pomocí sklopení obzorové roviny. Jednotky na osách 1x, 2x sestrojujeme s pomocí jejich dělicích bodů D1, D2. (Známe např. dolní distančník.) Čtvercovou síť sklepního půdorysu můžeme sestrojit buď tak, že sestrojíme na ose 1x jednotky (pomocí dělicího bodu D1, promítáním na z) a ty afinně zobrazíme na 1x, nebo lze z bodu D1 promítnout přímo na 1x jednotky ze z. Z vlastností afinity je zřejmé, že dostáváme tytéž body. (viz obr.24) 14

15 Perspektiva kružnice Ve středovém promítání se kružnice, která neleží ve středově promítací rovině rovině, zobrazí jako regulární kuželosečka. Středový průmět kružnice k je řez kužele s vrcholem S a řídící kružnicí k průmětnou. V lineární perspektivě požadujeme, aby zobrazované objekty ležely v zorném poli, tj. uvnitř zorného kužele. Promítací kužel kružnice k leží uvnitř zorného kužele a jeho řez rovinou ρ (průmětna) je elipsa, příp. kružnice. Kružnici v obecné poloze lze zobrazit stejně jako ve středovém promítání, otočením roviny kružnice do průmětny a užitím kolineace. V lineární perspektivě se nejčastěji zobrazují kružnice ve vodorovné nebo svislé poloze, pro tyto případy ukážeme konstrukci perspektivy kružnice. Kružnici k opíšeme dva čtverce ABCD a MPQR tak, aby jejich body dotyku (ozn. je 1, 2,..., 8) tvořily pravidelný osmiúhelník. (viz obr.25) Nejprve zobrazíme kružnici ve vodorovné rovině, např. v základní rovině π. Mějme dán střed O kružnice k a poloměr r. Perspektiva je opět zadána horizontem, základnicí a některým distančníkem. Opsané čtverce sestrojíme tak, aby strana AB byla rovnoběžná se z. Sestrojíme perspektivy obou čtverců a do nich vepíšeme elipsu (Známe pro ni osm tečen s body dotyku.) Strany 15

16 nebo úhlopříčky zvolených čtverců jsou buď průčelné nebo hloubkové přímky, úsečky dané délky od bodu O na ně nanášíme podle známých konstrukcí. Ve svislé rovině se většinou nezobrazují celé kružnice, pouze jejich části (např. ozdobné štíty domů). Zobrazíme půlkružnici ve svislé rovině σ, která bude dána stopu a úběžnicí. Protože je σ kolmá k π, je stopa i úběžnice kolmá k h. (Perspektiva je zadána stejně jako v předchozím příkladě.) Čtverce dané kružnici opíšeme tentokrát tak, aby strana CD byla rovnoběžná s π. Kružnice je dána středem O (neleží v π) a poloměrem. Přímka p=pr prochází O a je rovnoběžná s π. Promítneme p pravoúhle do roviny π, pravoúhlý průmět označíme p1. Úsečky dané délky nanášíme na přímku ležící v π, tedy na p1 a promítáme zpět na p. Známými konstrukcemi sestrojíme perspektivy čtverců a vepíšeme elipsy. 16
 a poloměrem. Přímka p=pr prochází O a je rovnoběžná s π. Promítneme p pravoúhle do roviny π, pravoúhlý průmět označíme p1.")
17 Kružnici lze sestrojit také užitím otočení roviny do ρ, některé konstrukce se zjednoduší díky tomu, že rovina σ je svislá. Otočené vodorovné přímky jsou rovnoběžné se z, zjistíme vzdálenost bodu O od nárysné stopy (osa kolineace) a sestrojíme na p0 bod O0. Vzdálenost opět zjišťujeme na přímce p1. Sestrojíme otočenou půlkružnici a perspektivu některé další svislé přímky, např. procházející bodem D. Na p1 naneseme vzdálenost této svislé přímky od nárysné stopy roviny σ. Perspektivy vodorovných přímek mají společný úběžník, můžeme sestrojit DsCs, 7s6s, odpovídající si přímky se samozřejmě protínají na ose kolineace. Bod D leží na svislé přímce, jejíž vzdálenost od nárysné stopy určíme v otočení, sestrojíme perspektivu svislé přímky. Dále např. bod 3 je průsečík vodorovné přímky CD a svislé přímky jdoucí bodem O. Můžeme sestrojit např. bod Q, jako průsečík vodorovné a svislé přímky, známe průsečík přímky Q0R0 s osou kolineace, sestrojíme perspektivu přímky QR atd. (viz obr.28) Perspektivní axonometrie (trojúběžníková perspektiva) Při konstrukci perspektivy rozsáhlejších komplexů budov, náměstí, objektů s nádvořím apod., metodami dosud používanými, se jednotlivé části překrývají a výsledný obrázek není názorný, nevidíme vše, co potřebujeme. Abychom dostali názornější obrázky, zvolíme tentokrát průmětnu ρ šikmou. Objekt bude opět stát na základní rovině π a přiřadíme mu přidružený souřadnicový systém stejně jako v průčelné a nárožní perspektivě. Na obrázku je volen počátek P přidruženého souřadnicového systému v π, osy 1x a 2x leží rovněž v π a žádná z os není tentokrát rovnoběžná s průmětnou. Označme in stopníky os ix a ius úběžníky os ix. Vzhledem k tomu, že průmětna není svislá, neleží hlavní bod na horizontu, horizont je průsečík obzorové roviny s ρ, tj. h=1us2us. Trojúhelník 1N2N3N nazýváme stopníkový trojúhelník a trojúhelník 1Us2Us3Us se nazývá úbežníkový trojúhelník. Z ortogonální axonometrie víme, že trojúhelník 1N2N3N je ostroúhlý a průsečík výšek je pravoúhlý průmět počátku do průmětny, tj. P2. Směrové přímky os ix protínají průmětnu v úběžnících, opět trojúhelník 1Us2Us3Us je ostroúhlý a průsečík jeho výšek je pravoúhlý průmět průsečíky přímek ix, tj. hlavní bod. Protože ix je rovnoběžné a ix jsou odpovídající si strany stopníkového a úběžníkového trojúhelníku rovnoběžné, tzn., že si odpovídají v nějaké homotetii. Protože spojnice odpovídajících si bodů prochází středem homotetie je středový průmět Ps počátku P středem homotetie. (Střed homotetie může být i nevlastní, tak by si ovšem trojúhelníky odpovídaly v posunutí, středový průmět počátku by byl nevlastní, což by znamenalo, že leží v centrální rovině a tedy mimo zorný kužel. Pokud by P=S, pak by trojúhelníky splynuly, průmětem os by byly body a bod P by opět neležel uvnitř zorného kužele. Střed homotetie je tedy vlastní, což znamená, že trojúhelníky si odpovídají ve stejnolehlosti se středem Ps.) Osy protínají průmětnu ve třech bodech, proto se tato perspektiva nazývá buď trojúbežníková perspektiva nebo také perspektivní axonometrie. 17

18 18
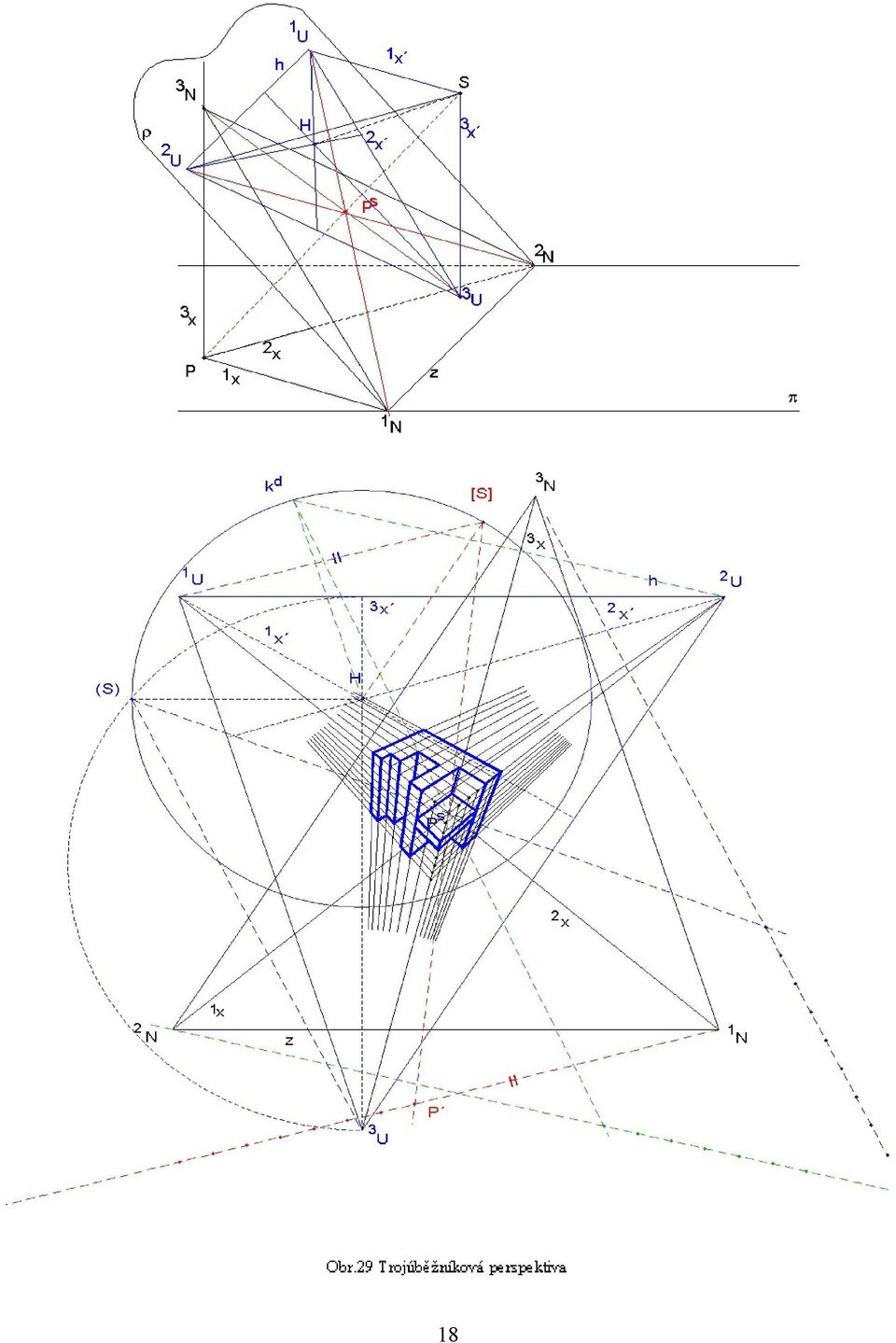
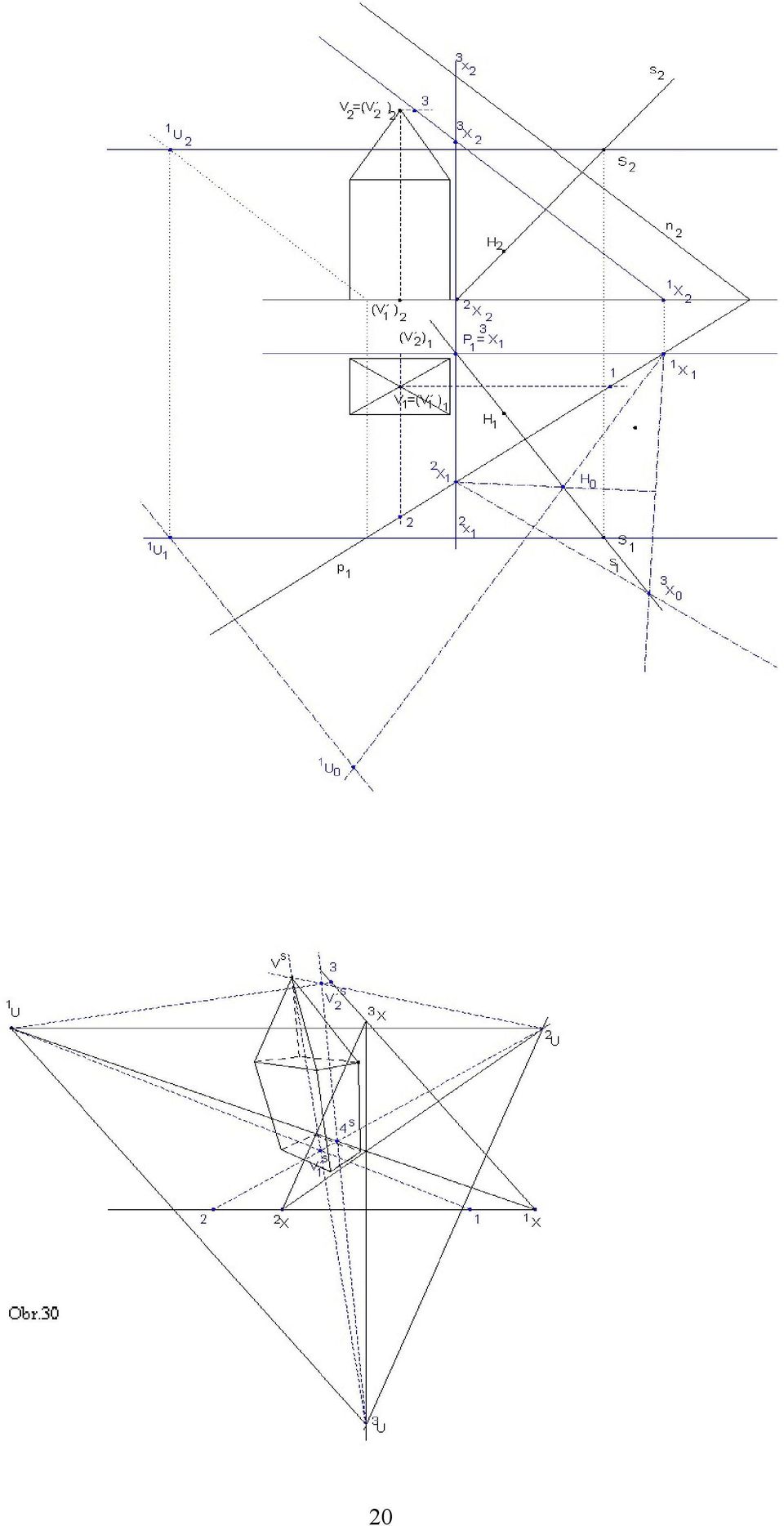
19 Sestrojíme perspektivu přidruženého souřadnicového systému. Zvolme si v nákresně (ztotožníme ji s průmětnou ρ) dva stejnolehlé trojúhelníky 1N2N3N, 1Us2Us3Us. Průsečík výšek v úběžníkovém trojúhelníku je hlavní bod, jeho vzdálenost od průmětny je distance. Tu určíme stejně jako v ortogonální axonometrii, například sklopením pravoúhle promítací roviny přímky 3x. Známe distanci, sestrojíme distanční kružnici kd. Průsečík přímek 1x=1N1Us2, 2x=2N2Us2 a 3x=3N3Us2(střed stejnolehlosti) je bod Ps. Naneseme jednotky na jednotlivé osy a sestrojíme čtvercovou siť. Jednotky nanášíme užitím dělicí kružnice. (Například pro osu 1x, sklopíme její směrovou přímky 1x do průmětny a dělicí kružnice je kružnice se středem 1Us a poloměrem 1Us[S]). Pomocí čtvercové sítě sestrojíme perspektivu podobně jako v průčelné či nárožní perspektivě. Ukázali jsme, že zadáním stopníkového a úběžníkového trojúhelníku je perspektivní axonometrie jednoznačně určena. Je-li objekt zadán sdruženými obrazy v Mongeově projekci, lze sestrojit jeho obraz v perspektivní axonometrii také metodami vázáné perspektivy, průmětna ρ však není svislá. Mějme dán objekt sdruženými obrazy v Mongeově projekci stojící na π v průčelné poloze (je mu přiřazen přidružený souřadnicový systém), průmětna ρ je určena stopami. Střed promítání se volí podobně jako v případě, že průmětna je svislá. (Objekt v zorném poli, S volíme podle toho, co má být vidět atd.) Zvolme pravoúhlý souřadnicový systém přidružený k danému objektu podle předchozího, jeho počátek položme do bodu P, P je půdorysný stopník osy s perspektivy. Průsečíky souřadnicových os 1x, 2x, 3x s rovinou ρ tvoří stopníkový trojúhelník. Body 1X, 2X leží v půdorysně, tj. na půdorysné stopě roviny ρ, přímka 1X3X je rovnoběžná s nárysnou, tj. je to hlavní přímka druhé osnovy roviny ρ. Středem S promítání vedeme směrovou přímku 1x osy 1x a určíme úběžník osy 1x (průsečík 1x s ρ). Rovinu ρ otočíme kolem půdorysné stopy do π a určíme otočený stopníkový trojúhelník 1X02X03X0 a otočený úběžník 1Us0 Průsečík H0 jeho výšek je otočený hlavní bod H. Perspektivní průmětnu přemístíme. Sestrojíme stopníkový trojúhelník, hlavní bod a úběžník osy 1x, skutečné velikosti úseček zjistíme z otočení. Ps splývá s bodem H, Ps je střed stejnolehlosti, sestrojíme úběžníkový trojúhelník stejnolehlý se stopníkovým trojúhelníkem. Sestrojíme perspektivu bodu V tělesa. Bod V pravoúhle promítneme do bodu V 1 v souřadnicové rovině 1x2x a do bodu V 2 v souřadnicové rovině 1x3x. Bod V 1 promítneme směrem rovnoběžným s 1x do bodu 1 na přímku 1X2X a směrem rovnoběžným s 2x do bodu 2 na přímku 1X2X. Přímka 1X2X leží v perspektivní průmětně, úsečky jsou na této přímce ve skutečné velikosti, body 1, 2 přeneseme do perspektivního obrázku. Spojíme je s příslušnými úběžníky (sestrojíme perspektivy přímek rovnoběžných s 1x, 2x) a dostaneme perspektivu V 1s bodu V 1. Podobně promítneme bod V 2 směrem rovnoběžným s 1x do bodu 3 na přímku 1X2X. Bod 3 můžeme přenést přímo, přímka 1X3X je rovnoběžná s nárysnou a leží v perspektivní průmětně. Promítneme také V 2 směrem rovnoběžným s 3x do osy 1x, bod 4 leží na přímce 2V 1. Bod 4s spojíme s úběžníkem 3 U (přímka směru 3x), bod 3 spojíme s úběžníkem 1U (přímka směru 1x). V průsečíku těchto přímek je perspektiva V 2s bodu V 2. Bod V leží na přímce směru 3x procházející V 1 a na přímce směru 2x procházející V 2. Pro konstrukci zbývajících bodů užíváme uvedený postup v kombinaci s využitím úběžníků souřadnicových os. (viz obr.30) 19
 je bod Ps. Naneseme jednotky na jednotlivé osy a sestrojíme čtvercovou siť. Jednotky nanášíme užitím dělicí kružnice.")
20 20
středu promítání (oka) se objekty promítají do roviny (nahrazuje sítnici). Perspektivní obrazy
 se objekty promítají do roviny (nahrazuje sítnici). Perspektivní obrazy") Lineární perspektiva Lineární perspektiva je významnou aplikací středového promítání. V technické praxi se používá především k zobrazování objektů větších rozměrů, napodobuje tak lidské vidění. Ze středu
Lineární perspektiva Lineární perspektiva je významnou aplikací středového promítání. V technické praxi se používá především k zobrazování objektů větších rozměrů, napodobuje tak lidské vidění. Ze středu
RELIÉF. Reliéf bodu. Pro bod ležící na s splynou přímky H A 2 a SA a reliéf není tímto určen.
 RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
Aplikace lineární perspektivy
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Aplikace lineární perspektivy Vypracoval: Jakub Sýkora Třída: 8.M Školní rok: 2015/2016 Seminář : Deskriptivní geometrie Prohlašuji,
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Aplikace lineární perspektivy Vypracoval: Jakub Sýkora Třída: 8.M Školní rok: 2015/2016 Seminář : Deskriptivní geometrie Prohlašuji,
FOTOGRAMMETRIE. Rekonstrukce svislého nezáměrně pořízeného snímku, známe-li obraz čtverce ve vodorovné rovině
 FOTOGRAMMETRIE Máme-li k dispozici jednu nebo několik fotografií daného objektu (objekt zobrazený v lineární perspektivě), pomocí fotogrammetrie můžeme zjistit jeho tvar, rozměr či polohu v prostoru. Známe-li
FOTOGRAMMETRIE Máme-li k dispozici jednu nebo několik fotografií daného objektu (objekt zobrazený v lineární perspektivě), pomocí fotogrammetrie můžeme zjistit jeho tvar, rozměr či polohu v prostoru. Známe-li
ZÁKLADNÍ ZOBRAZOVACÍ METODY
 ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI
 KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Perspektiva. Doplňkový text k úvodnímu cvičení z perspektivy. Obsahuje: zobrazení kružnice v základní rovině metodou osmi tečen
 Perspektiva Doplňkový text k úvodnímu cvičení z perspektivy Obsahuje: úvodní pojmy určení skutečné velikosti úsečky zadané v různých polohách zobrazení kružnice v základní rovině metodou osmi tečen 1 Příklad
Perspektiva Doplňkový text k úvodnímu cvičení z perspektivy Obsahuje: úvodní pojmy určení skutečné velikosti úsečky zadané v různých polohách zobrazení kružnice v základní rovině metodou osmi tečen 1 Příklad
Základní úlohy v Mongeově promítání. n 2 A 1 A 1 A 1. p 1 N 2 A 2. x 1,2 N 1 x 1,2. x 1,2 N 1
 Základní úlohy v Mongeově promítání Předpokladem ke zvládnutí zobrazení v Mongeově promítání je znalost základních úloh. Ale k porozumění následujícího textu je třeba umět zobrazit bod, přímku a rovinu
Základní úlohy v Mongeově promítání Předpokladem ke zvládnutí zobrazení v Mongeově promítání je znalost základních úloh. Ale k porozumění následujícího textu je třeba umět zobrazit bod, přímku a rovinu
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
MONGEOVO PROMÍTÁNÍ. bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po dlouhou dobu bylo vojenským tajemstvím
 po dlouhou dobu bylo vojenským tajemstvím") část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
AXONOMETRIE - 2. část
 AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
Středové promítání. Středové promítání E ~ ~ 3. dané průmětnou r a bodem S (S r) je zobrazení prostoru...
 je zobrazení prostoru...") Středové promítání Středové promítání dané průmětnou r a bodem S (S r) je zobrazení prostoru... E ~ 3 (bez S) na r takové, že obrazem bodu A je bod A =SA r. rozšířená euklidovská přímka E ~ 1 E1 U E ~
Středové promítání Středové promítání dané průmětnou r a bodem S (S r) je zobrazení prostoru... E ~ 3 (bez S) na r takové, že obrazem bodu A je bod A =SA r. rozšířená euklidovská přímka E ~ 1 E1 U E ~
Pravoúhlá axonometrie
 Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA. Mgr. Ondřej Machů. --- Pracovní verze:
 DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
MONGEOVO PROMÍTÁNÍ - 2. část
 MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
BA008 Konstruktivní geometrie. Kolmá axonometrie. pro kombinované studium. učebna Z240 letní semestr
 BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]
![MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]](/thumbs/55/35543113.jpg "MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]") ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
pomocný bod H perspektivního obrázku zvolte 10 cm zdola a 7 cm zleva.)
") Teoretické řešení střech Zastřešení daného půdorysu rovinami různého spádu vázaná ptačí perspektiva Řešené úlohy Příklad: tačí perspektivě vázané na Mongeovo promítání zobrazte řešení střechy nad daným
Teoretické řešení střech Zastřešení daného půdorysu rovinami různého spádu vázaná ptačí perspektiva Řešené úlohy Příklad: tačí perspektivě vázané na Mongeovo promítání zobrazte řešení střechy nad daným
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
3.MONGEOVO PROMÍTÁNÍ. Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru
 3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
1. MONGEOVO PROMÍTÁNÍ
 Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
BAKALÁŘSKÁ PRÁCE. Řešené úlohy v axonometrii. UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie
 UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie BAKALÁŘSKÁ PRÁCE Řešené úlohy v axonometrii Vypracovala: Barbora Bartošová M-DG, III. ročník Vedoucí práce: RNDr. Miloslava
UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie BAKALÁŘSKÁ PRÁCE Řešené úlohy v axonometrii Vypracovala: Barbora Bartošová M-DG, III. ročník Vedoucí práce: RNDr. Miloslava
Fotogrammetrie. zpracovala Petra Brůžková. Fakulta Architektury ČVUT v Praze 2012
 Fotogrammetrie zpracovala Petra Brůžková Fakulta Architektury ČVUT v Praze 2012 Fotogrammetrie je geometrický postup, který nám umožňuje určení tvaru, velikosti a polohy reálných objektů na základě fotografického
Fotogrammetrie zpracovala Petra Brůžková Fakulta Architektury ČVUT v Praze 2012 Fotogrammetrie je geometrický postup, který nám umožňuje určení tvaru, velikosti a polohy reálných objektů na základě fotografického
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY
 ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
JEVIŠTNÍ PERSPEKTIVA TABULKA 19
 OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
OBSAH tabulka strana Předmluva 6 Úvod 7 Základní pojmy v perspektivě 1 8 Výška oka sedícího diváka 2 9 Průčelná perspektiva centrální, pozorovací bod je na ose symetrie, základna prochází stranou BC 3
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Technické osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
půdorysu; pro každý bod X v prostoru je tedy sestrojen pouze jeho nárys X 2 a pro jeho
 Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
OBECNÉ ROTAČNÍ PLOCHY
 OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Axonometrie KG - L ZS MZLU v Brně. KG - L (MZLU v Brně) Axonometrie ZS / 60
 Axonometrie ZS / 60") Axonometrie KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Axonometrie ZS 2008 1 / 60 Obsah 1 Úvod 2 Typy axonometrií 3 Pravoúhlá axonometrie Zobrazení přímky Zobrazení roviny Polohové úlohy KG - L (MZLU
Axonometrie KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Axonometrie ZS 2008 1 / 60 Obsah 1 Úvod 2 Typy axonometrií 3 Pravoúhlá axonometrie Zobrazení přímky Zobrazení roviny Polohové úlohy KG - L (MZLU
PŘÍMKOVÉ PLOCHY. Přednáška DG2*A
 PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie. Pomocný učební text. František Ježek, Světlana Tomiczková
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]
![[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]](/thumbs/51/27343209.jpg "[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]") Příklad Do dané kruhové výseče s ostrým středovým úhlem vepište kružnici (obr. ). M k l V N [obr. ] Rozbor Oblouk l a hledaná kružnice k se dotýkají v bodě T, mají proto v tomto bodě společnou tečnu t.
Příklad Do dané kruhové výseče s ostrým středovým úhlem vepište kružnici (obr. ). M k l V N [obr. ] Rozbor Oblouk l a hledaná kružnice k se dotýkají v bodě T, mají proto v tomto bodě společnou tečnu t.
ROTAČNÍ KVADRIKY. Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou
 ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta. ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) ---
 ---") DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
Mongeova projekce - úlohy polohy
 Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
NÁVOD NA VYROBENÍ PERSPEKTIVNÍ KRABIČKY
 NÁVOD NA VYROBENÍ PERSPEKTIVNÍ KRABIČKY 1. PERSPEKTIVNÍ KRABIČKA Perspektivní krabička je krabička, většinou bez víka, s malým otvorem na jedné straně, uvnitř pomalovaná různými obrazci. Když se do krabičky
NÁVOD NA VYROBENÍ PERSPEKTIVNÍ KRABIČKY 1. PERSPEKTIVNÍ KRABIČKA Perspektivní krabička je krabička, většinou bez víka, s malým otvorem na jedné straně, uvnitř pomalovaná různými obrazci. Když se do krabičky
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE KOSOÚHLÉ PROMÍTÁNÍ DO PŮDORYSNY BAKALÁŘSKÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání: 2012 Vypracovala:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE KOSOÚHLÉ PROMÍTÁNÍ DO PŮDORYSNY BAKALÁŘSKÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání: 2012 Vypracovala:
ROČNÍKOVÁ PRÁCE. Užití lineární perspektivy
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Užití lineární perspektivy Vypracoval: Michal Černý Třída: 4. C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Užití lineární perspektivy Vypracoval: Michal Černý Třída: 4. C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že
Kótované promítání. Úvod. Zobrazení bodu
 Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
ŘEŠENÉ PŘÍKLADY DESKRIPTIVNÍ GEOMETRIE. ONDŘEJ MACHŮ a kol.
 ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
tečen a osu o π, V o; plochu omezte hranou vratu a půdorysnou a proved te rozvinutí
 Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
0 x 12. x 12. strana Mongeovo promítání - polohové úlohy.
 strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Technické Osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Pracovní listy MONGEOVO PROMÍTÁNÍ
 Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
Zobrazení a řezy těles v Mongeově promítání
 UNIVERZITA PALACKÉHO V OLOMOUCI Pedagogická fakulta Katedra matematiky Michaela Sukupová 3. ročník prezenční studium Obor: Matematika se zaměřením na vzdělávání a český jazyk se zaměřením na vzdělávání
UNIVERZITA PALACKÉHO V OLOMOUCI Pedagogická fakulta Katedra matematiky Michaela Sukupová 3. ročník prezenční studium Obor: Matematika se zaměřením na vzdělávání a český jazyk se zaměřením na vzdělávání
AXONOMETRIE. Rozměry ve směru os (souřadnice bodů) jsou násobkem příslušné jednotky.
 jsou násobkem příslušné jednotky.") AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
MATEMATIKA. Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci
 MATEMATIKA Úloha o čtverci a přímkách ŠÁRKA GERGELITSOVÁ TOMÁŠ HOLAN Matematicko-fyzikální fakulta UK, Praha Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci (například podobnosti)
MATEMATIKA Úloha o čtverci a přímkách ŠÁRKA GERGELITSOVÁ TOMÁŠ HOLAN Matematicko-fyzikální fakulta UK, Praha Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci (například podobnosti)
Je-li dána hranolová nebo jehlanová plocha s podstavou v rovině σ a rovina řezu ρ:
 Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika. Bítov Blok 1: Kinematika
 Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA. DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě
 MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě BRNO 2006 BLANKA MORÁVKOVÁ Prohlášení: Prohlašuji, že jsem diplomovou práci vypracovala
MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě BRNO 2006 BLANKA MORÁVKOVÁ Prohlášení: Prohlašuji, že jsem diplomovou práci vypracovala
SBÍRKA ÚLOH STEREOMETRIE. Polohové vlastnosti útvarů v prostoru
 SÍR ÚO STROTRI Polohové vlastnosti útvarů v prostoru Sbírka úloh STROTRI Polohové vlastnosti útvarů v prostoru gr. arie hodorová, Ph.. rafická úprava a sazba: arcel Vrbas OS SZN POUŽÍVNÝ SYOŮ 5. ZÁY STROTRI
SÍR ÚO STROTRI Polohové vlastnosti útvarů v prostoru Sbírka úloh STROTRI Polohové vlastnosti útvarů v prostoru gr. arie hodorová, Ph.. rafická úprava a sazba: arcel Vrbas OS SZN POUŽÍVNÝ SYOŮ 5. ZÁY STROTRI
Shodná zobrazení. bodu B ležet na na zobrazené množině b. Proto otočíme kružnici b kolem
 Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 1. Pomocný učební text
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 11. září 2006 verze 4.0 Předmluva
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 11. září 2006 verze 4.0 Předmluva
Tříúběžníková perspektiva
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Tříúběžníková perspektiva Vypracoval: Martin Bouček Třída: 8. M Škoní rok: 2014/2015 Seminář: Deskriptivní geometrie Prohlašuji, že
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Tříúběžníková perspektiva Vypracoval: Martin Bouček Třída: 8. M Škoní rok: 2014/2015 Seminář: Deskriptivní geometrie Prohlašuji, že
Test č. 6. Lineární perspektiva
 Test č. 6 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2008-2009 Lineární perspektiva (1) Nad průměrem A S B S (A, B leží v základní rovině π) sestrojte metodou osmi tečen
Test č. 6 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2008-2009 Lineární perspektiva (1) Nad průměrem A S B S (A, B leží v základní rovině π) sestrojte metodou osmi tečen
5 Pappova věta a její důsledky
 5 Pappova věta a její důsledky Pappos z Alexandrie (?90?350), řecký matematik a astronom. Pod označením Pappova věta je uváděno více vět. Proto je třeba uvést, o jaké z těchto vět hovoříme. Zde se budeme
5 Pappova věta a její důsledky Pappos z Alexandrie (?90?350), řecký matematik a astronom. Pod označením Pappova věta je uváděno více vět. Proto je třeba uvést, o jaké z těchto vět hovoříme. Zde se budeme
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Ročníková práce Konstrukce kuželosečky zadané pěti body
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Konstrukce kuželosečky zadané pěti body Jakub Borovanský 4. C 2011/2012 Zadavatel: Mgr. Ondřej Machů Přísahám, že jsem zadanou ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 Ročníková práce Konstrukce kuželosečky zadané pěti body Jakub Borovanský 4. C 2011/2012 Zadavatel: Mgr. Ondřej Machů Přísahám, že jsem zadanou ročníkovou
Mongeovo zobrazení. Bod a přímka v rovině
 Mongeovo zobrazení Bod a přímka v rovině Přímka v rovině Přímka v rovině připomeňme si nejprve větu, která říká, kdy přímka leží v rovině; Přímka v rovině připomeňme si nejprve větu, která říká, kdy přímka
Mongeovo zobrazení Bod a přímka v rovině Přímka v rovině Přímka v rovině připomeňme si nejprve větu, která říká, kdy přímka leží v rovině; Přímka v rovině připomeňme si nejprve větu, která říká, kdy přímka
Pracovní listy LINEÁRNÍ PERSPEKTIVA
 Tecnická univerita v Liberci Fakulta přírodovědně-umanitní a pedagogická Katedra matematiky a didaktiky matematiky LINEÁRNÍ PERPEKTIVA Petra Pirklová Liberec, květen 07 . Ve stopníkové metodě obrate stupně
Tecnická univerita v Liberci Fakulta přírodovědně-umanitní a pedagogická Katedra matematiky a didaktiky matematiky LINEÁRNÍ PERPEKTIVA Petra Pirklová Liberec, květen 07 . Ve stopníkové metodě obrate stupně
Aplikace deskriptivní geometrie
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Rozšíření akreditace učitelství matematiky a učitelství deskriptivní geometrie na PřF UP v Olomouci o formu kombinovanou CZ.1.07/2.2.00/18.0013 Aplikace deskriptivní geometrie
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Rozšíření akreditace učitelství matematiky a učitelství deskriptivní geometrie na PřF UP v Olomouci o formu kombinovanou CZ.1.07/2.2.00/18.0013 Aplikace deskriptivní geometrie
KARTOGRAFIE. Rovinné projekce. Gnómické projekce. 1. Pólová gnómonická projekce
 KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
KARTOGRAFIE Kartografie se zabývá zobrazováním zemského povrchu. Zemský povrch (geoid) nahrazujeme plochou kulovou a tu zobrazujeme. Délky zmenšujeme v daném měřítku. Na kulové ploše zavádíme souřadný
Mongeovo zobrazení. Osová afinita
 Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
KONSTRUKTIVNÍ GEOMETRIE
 KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
Obrázek 34: Vznik středové kolineace
 6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
Syntetická geometrie I
 Shodnost Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Definice (Vzdálenost) Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB
Shodnost Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Definice (Vzdálenost) Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB
KÓTOVANÉ PROMÍTÁNÍ KÓTOVANÉ PROMÍTÁNÍ
 KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného
: elipsa je průsečnou křivkou rovinného") Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 1. Pomocný učební text
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 29. srpna 2005 verze 1.0 Předmluva
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 29. srpna 2005 verze 1.0 Předmluva
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
8 Podobná (ekviformní) zobrazení v rovině
 zobrazení v rovině") Typeset by LATEX2ε 1 8 Podobná (ekviformní) zobrazení v rovině 8.1 Stejnolehlost (homotetie) v rovině Definice 8.1.1. Nechť jsou dány 3 různé kolineární body A, B, C. Dělicím poměrem λ = (ABC) rozumíme
Typeset by LATEX2ε 1 8 Podobná (ekviformní) zobrazení v rovině 8.1 Stejnolehlost (homotetie) v rovině Definice 8.1.1. Nechť jsou dány 3 různé kolineární body A, B, C. Dělicím poměrem λ = (ABC) rozumíme
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Deskriptivní geometrie Díl Deskriptivní geometrie,. díl Mgr. Ivona Spurná Jazyková úprava:
Deskriptivní geometrie pro střední školy. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Deskriptivní geometrie Díl Deskriptivní geometrie,. díl Mgr. Ivona Spurná Jazyková úprava:
Zářezová metoda Kosoúhlé promítání
 Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
Sférická a Cylindrická perspektiva
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Sférická a Cylindrická perspektiva Vypracoval: Sebastián Náse Třída: 4. C Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlášení
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Sférická a Cylindrická perspektiva Vypracoval: Sebastián Náse Třída: 4. C Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlášení
Zadání domácích úkolů a zápočtových písemek
 Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
s touto válcovou plochou. Tento případ nebudeme dále uvažovat.
 Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Čtyřúhelník. O b s a h : Čtyřúhelník. 1. Jak definovat čtyřúhelník základní vlastnosti. 2. Názvy čtyřúhelníků Deltoid Tětivový čtyřúhelník
 Čtyřúhelník : 1. Jak definovat čtyřúhelník základní vlastnosti 2. Názvy čtyřúhelníků 2.1. Deltoid 2.2. Tětivový čtyřúhelník 2.3. Tečnový čtyřúhelník 2.4. Rovnoběžník 2.4.1. Základní vlastnosti 2.4.2. Výšky
Čtyřúhelník : 1. Jak definovat čtyřúhelník základní vlastnosti 2. Názvy čtyřúhelníků 2.1. Deltoid 2.2. Tětivový čtyřúhelník 2.3. Tečnový čtyřúhelník 2.4. Rovnoběžník 2.4.1. Základní vlastnosti 2.4.2. Výšky
Mongeovo zobrazení. Řez jehlanu
 Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
Zborcené plochy. Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- tzv. Chaslesova věta:
 Zborcené plochy Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- becném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
Zborcené plochy Přímkové plochy lze vytvořit i jiným způsobem než jsme je dosud konstruovali. V o- becném případě lze přímku zadat jako průsečnici dvou rovin, každá přímka v prostoru tak je zadána čtyřmi
Perspektiva. In: Emil Kraemer (author): Perspektiva. (Czech). Praha: Přírodovědecké nakladatelství, pp
: Perspektiva. (Czech). Praha: Přírodovědecké nakladatelství, pp") Perspektiva 5. Přímá methoda (Volná perspektiva) In: Emil Kraemer (author): Perspektiva. (Czech). Praha: Přírodovědecké nakladatelství, 1951. pp. 48 71. Persistent URL: http://dml.cz/dmlcz/402929 Terms
Perspektiva 5. Přímá methoda (Volná perspektiva) In: Emil Kraemer (author): Perspektiva. (Czech). Praha: Přírodovědecké nakladatelství, 1951. pp. 48 71. Persistent URL: http://dml.cz/dmlcz/402929 Terms
Užití stejnolehlosti v konstrukčních úlohách
 Užití stejnolehlosti v konstrukčních úlohách Příklad 1: Je dána kružnice k(o,r) a bod M ležící uvnitř kružnice k. Bodem M veďte tětivu AB, jejíž délka je bodem M rozdělena v poměru 2 : 1. Sestrojte obraz
Užití stejnolehlosti v konstrukčních úlohách Příklad 1: Je dána kružnice k(o,r) a bod M ležící uvnitř kružnice k. Bodem M veďte tětivu AB, jejíž délka je bodem M rozdělena v poměru 2 : 1. Sestrojte obraz
Kreslení, rýsování. Zobrazení A B. Promítání E 3 E 2
 Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Pravoúhlá axonometrie. tělesa
 Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Aplikace lineární perspektivy
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Aplikace lineární perspektivy Vypracoval: Jiří Koucký Třída: 8. M Školní rok: 2014/2015 Seminář: Deskriptivní geometrie Prohlašuji,
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Aplikace lineární perspektivy Vypracoval: Jiří Koucký Třída: 8. M Školní rok: 2014/2015 Seminář: Deskriptivní geometrie Prohlašuji,
Radka Matěková Anaglyfy a jejich využití ve výuce stereometrie
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Radka Matěková Anaglyfy a jejich využití ve výuce stereometrie Katedra didaktiky matematiky Vedoucí bakalářské práce: RNDr. Petra
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Radka Matěková Anaglyfy a jejich využití ve výuce stereometrie Katedra didaktiky matematiky Vedoucí bakalářské práce: RNDr. Petra
Syntetická geometrie I
 Shodnost Pedagogická fakulta 2016 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB = BA pozitivně definitní
Shodnost Pedagogická fakulta 2016 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB = BA pozitivně definitní
9 Axonometrie ÚM FSI VUT v Brně Studijní text. 9 Axonometrie
 9 Axonometrie Mongeov projekce má řdu předností: jednoduchost, sndná měřitelnost délek úhlů. Je všk poměrně nenázorná. Podsttnou část technických výkresů proto tvoří kromě půdorysu, nárysu event. bokorysu
9 Axonometrie Mongeov projekce má řdu předností: jednoduchost, sndná měřitelnost délek úhlů. Je všk poměrně nenázorná. Podsttnou část technických výkresů proto tvoří kromě půdorysu, nárysu event. bokorysu
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Konstruktivní geometrie - LI. Konstruktivní geometrie - LI () Kótované promítání 1 / 44
 Kótované promítání 1 / 44") Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
Pravoúhlá axonometrie - osvětlení těles
 Pravoúhlá axonometrie - osvětlení těles KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles ZS 2008 1 / 39 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles
Pravoúhlá axonometrie - osvětlení těles KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles ZS 2008 1 / 39 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles
ŠROUBOVÉ PLOCHY. 1. Základní úlohy na šroubových plochách.
 ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i