BAKALÁŘSKÁ PRÁCE. Řešené úlohy v axonometrii. UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie
|
|
|
- Martin Urban
- před 9 lety
- Počet zobrazení:
Transkript
1 UNIVERZITA PALACKÉHO V OLOMOUCI Přírodovědecká fakulta Katedra algebry a geometrie BAKALÁŘSKÁ PRÁCE Řešené úlohy v axonometrii Vypracovala: Barbora Bartošová M-DG, III. ročník Vedoucí práce: RNDr. Miloslava Sedlářová, CSc. Rok odevzdání: 2010

2 Prohlašuji, že jsem bakalářskou práci zpracovala samostatně pod vedením RNDr. Miloslavy Sedlářové, CSc. a že jsem v seznamu literatury uvedla všechny zdroje použité při zpracování práce. V Olomouci dne

3 Ráda bych poděkovala vedoucí mé práce, RNDr. Miloslavě Sedlářové, CSc., za cenné rady, ochotu a čas, který mi věnovala. 3

4 OBSAH Úvod Pravoúhlá axonometrie Základní pojmy Zobrazení základních prvků Pomocné konstrukce Otočení pomocné průmětny do axonometrické průmětny Sklápění do axonometrické průmětny Otočení obecné roviny do axonometrické průmětny Průnik přímky a s rovinou α Skutečná velikost úsečky Přímka kolmá k rovině Rovina kolmá k přímce Zobrazení kružnice v pomocných průmětnách Zobrazení kružnice v obecné rovině Konstrukce elipsy jako obraz kružnice v kolineaci Konstrukce paraboly jako obraz kružnice v kolineaci Konstrukce hyperboly jako obraz kružnice v kolineaci Řešené úlohy Konstrukce těles Řezy těles Osvětlení Průnik těles Použitá literatura

5 Úvod Tato bakalářská práce se zabývá řešením příkladů v pravoúhlé axonometrii. Cílem bylo vybrat různé úlohy, které se typicky vyskytují v učebnicích deskriptivní geometrie. Práce je zaměřena pouze na pravoúhlou axonometrii. U čtenáře se předpokládá znalost vlastností těles, základních konstrukcí, např. různé konstrukce kuželoseček, a některých zobrazení (osová afinita, středová kolineace). Text je rozdělen do tří kapitol. V první je stručně zavedena pravoúhlá axonometrie a jsou zde popsány konstrukce základních prvků. Druhá kapitola se zabývá pomocnými úlohami, které jsou použity později při samotných konstrukcích. Třetí kapitola se věnuje konstrukcím těles, řezů, osvětlení a průniků těles. Příklady jsou narýsovány v programu QCaD. Text je vysázen pomocí typografického systému TEX. 5

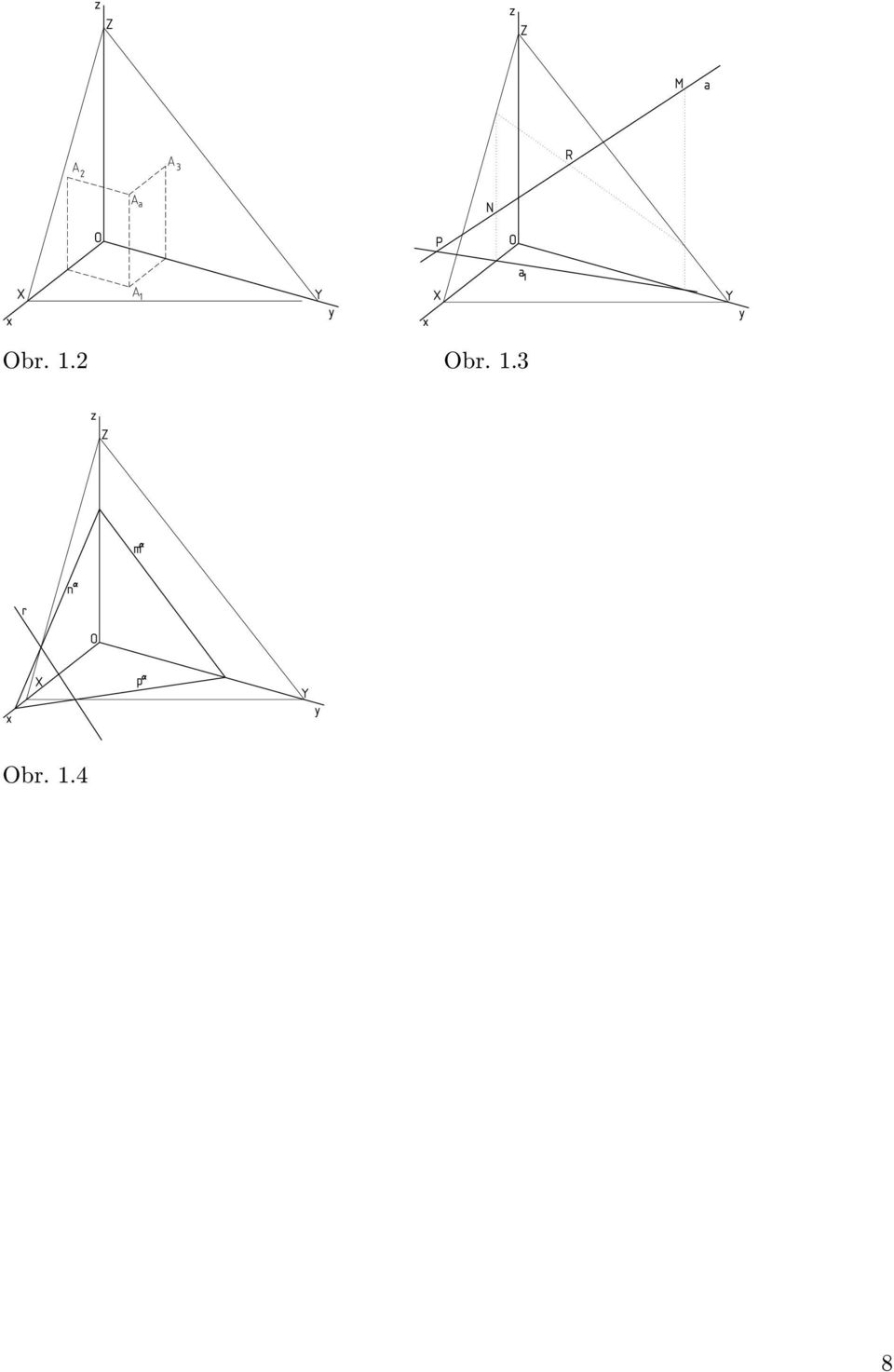
6 1. Pravoúhlá axonometrie Pravoúhlou (ortogonální) axonometrii užíváme především k sestrojení názorných obrazů, přičemž řešení potřebných metrických úloh není příliš náročné. Pravoúhlá axonometrie se využívá např. ve strojírenství k názornému zobrazení součástí Základní pojmy Pravoúhlá axonometrie je kolmé promítání na dvě navzájem kosé průmětny. Jedna z nich je axonometrická průmětna, značíme ji 0 π. Druhá průmětna je pomocná, obvykle se značí 1 π. Bod A zobrazíme tak, že jej pravoúhle promítneme do axonometrické průmětny do bodu A a. Dále sestrojíme prvý průmět bodu A do pomocné průmětny a ten pravoúhle promítneme do axonometrické průmětny. Tím získáme tzv.axonometrický půdorys A 1. Dvojice (A a, A 1 ) leží na ordinále (kolmici k průsečnici obou průměten). Pravoúhlá axonometrie je tedy vzájemně jednoznačné zobrazení bodů prostoru na uspořádanou dvojici průmětů. V praxi se ovšem místo pravoúhlé axonometrie se dvěma průmětnami využívá axonometrie se čtyřmi průmětnami. Ta vychází z pravoúhlého souřadnicového systému {O; x, y, z}, jehož všechny souřadnicové roviny volíme za pomocné průmětny 1 π, 2 π, 3 π. Axonometrickou průmětnu volíme tak, aby byla kosá ke všem pomocným průmětnám a aby neprocházela počátkem O. Pomocné průmětny protínají axonometrickou průmětnu v přímkách - axonometrických stopách pomocných průměten. Ty určují trojúhelník, jehož vrcholy X, Y, Z jsou průsečíky axonometrické průmětny s osami x, y, z. Trojúhelník XY Z se nazývá axonometrický trojúhelník. Osy x, y, z se promítnou do přímek x a, y a, z a procházejících průmětem počátku O a a vrcholy axonometrického trojúhelníka. V této práci budeme pro zjednodušení nadále značit průměty souřadnicových os a počátku pouze x, y, z, O. Axonometrické průměty x, y, z tvoří tzv. axonometrický osový kříž. Axonometrický trojúhelník je vždy ostroúhlý a osový kříž je tvořen výškami axonometrického trojúhelníka. Úseky na osách x, y, z nebo na přímkách s nimi rovnoběžných se zkracují. Chcemeli určit jednotky na osách, využijeme sklopení, nebo otočení pomocné průmětny do axonometricé průmětny (viz. kapitola 2). (obr. 1.1) 6

7 Obr Zobrazení základních prvků Bod prostoru se zobrazí jako uspořádaná dvojice A a, A 1. Oba obrazy leží na ordinále rovnoběžné s osou z. Zbývající obrazy bodu zobrazíme pomocí souřadnicového kvádru (obr. 1.2). Dále v této práci budeme uvádět axonometrický průmět již bez indexu a, tedy místo A a budeme psát pouze A. Přímka je určena průměty dvou různých bodů, které na ní leží. Aby byla přímka zobrazena jednoznačně, je potřeba znát dva její průměty - obvykle se zadává axonometrický průmět přímky a axonometrický průmět jejího prvého průmětu. Přímka má až čtyři stopníky - půdorysný P, nárysný N, bokorysný M a axonometrický R. Půdorysný, resp. nárysný, resp. bokorysný stopník se určí jako průsečík axonometrického průmětu přímky s axonometrickým průmětem prvého průmětu, resp. druhého průmětu, resp. třetího průmětu přímky. Axonometrický stopník se určí jako průsečík přímky s axonometricnou průmětnou (obr. 1.3). Rovina kolmá k axonometrické průmětně se zobrazí jako přímka. Jakákoli jiná rovina se zobrazí jako axonometrická průmětna. Abychom mohli řešit úlohy v rovině, stačí nám znát průměty dvou jejích různých přímek. Užívá se především stop roviny. Rovina má až čtyři stopy: půdorysnou p α (průnik roviny s prvou pomocnou průmětnou), nárysnou n α (průnik roviny s druhou pomocnou průmětnou), bokorysnou m α (průnik roviny s třetí pomocnou průmětnou) a axonometrickou r α (průnik roviny s axonometrickou průmětnou)(obr. 1.4). 7

8 Obr. 1.2 Obr. 1.3 Obr
9 2. Pomocné konstrukce 2.1. Otočení pomocné průmětny do axonometrické průmětny Leží-li nějaký objekt v některé z průměten 1 π, 2 π, 3 π, zobrazí se v pravoúhlé axonometrii zkresleně - nezachovávají se úhly, ani velikosti úseček. Potřebujeme-li získat nezkreslený obraz, např. při nanášení jednotek na souřadnicové osy, můžeme využít otočení pomocné průmětny do axonometrické průmětny kolem její axonometrické stopy. Prvou průmětnu otočíme kolem její axonometrické stopy XY. Trojúhelník XY O je pravoúhlý s pravým úhlem při vrcholu O. Body X, Y leží na ose otáčení, jsou tedy samodružné. Otočený bod (O) leží na Thaletově kružnici nad úsečkou XY. Zároveň leží v rovině otáčení bodu O, jejíž stopa prochází bodem O a je kolmá k XY, splývá tedy s osou z. Tato přímka protne Thaletovu kružnici ve dvou bodech, z nichž jeden prohlásíme za otočenou polohu bodu O, značíme (O). Přímka (O)X, resp. (O)Y je otočenou polohou osy x, resp. y (obr. 2.1). Na ty můžeme od bodu (O) nanášet jednotky ve skutečné velikosti. Obdobně můžeme otočit kteroukoli z pomocných průměten 1 π, 2 π, 3 π. Další body můžeme otáčet pomocí osové afinity. Osa afinity je XY, směr afinity je kolmý na osu a dvojice odpovídajících si bodů O (O). (obr. 2.1) Obr

10 2.2. Sklápění do axonometrické průmětny Další možností, jak na osu nanést úseky dané délky je sklopení axonometricky promítací roviny osy do axonometrické průmětny. Při sklápění promítací roviny osy x najdeme bod K = x Y Z. Jelikož body X, K leží v axonometrické průmětně, zůstanou při sklápění pevné. Trojúhelník XKO je pravoúhlý s pravým úhlem při vrcholu O, tudíž sklopený bod (O) musí ležet jednak na Thaletově kružnici nad průměrem XK a jednak na kolmici k x procházející bodem O. Opět si můžeme zvolit, který z průsečíků vezmeme za sklopený bod (O). Přímka X(O) je sklopená osa x. Na (x) můžeme od bodu (O) nanést úsečku dané délky a ve směru kolmém k ose x ji nanést přímo na osu. Pomocí této konstrukce také můžeme určit vzdálenost daného bodu od axnometrické průmětny. Leží-li např. bod A na ose x, sklopíme axonometricky promítací rovinu osy x a vzdálenost A(A) je vzdálenost bodu A od axonometrické průmětny. Bod B je obecný bod, který neleží v axonometrické průmětně. Tímto bodem vedeme rovinu α rovnoběžnou s axonometrickou průmětnou. Všechny body této roviny mají od axonometrické průmětny stejnou vzdálenost jako bod A, proto stačí najít vzdálenost např. bodu Q = α x od axonometrické průmětny. (obr. 2.2) Obr
. Přímka X(O) je sklopená osa x.")
11 2.3. Otočení obecné roviny do axonometrické průmětny Je-li potřeba získat nezkreslený obraz objektu ležícího v obecné rovině, danou rovinu otočíme do axonometrické průmětny kolem její axonometrické stopy r. Otočíme jeden její bod neležící na ose otáčení, pro jednoduchost např. A = ρ x, pro který můžeme snadno najít vzdálenost A(A) od axonometrické průmětny. Rovina otáčení bodu A je axonometricky promítací, proto se zobrazí jako kolmice na osu otáčení. Střed otáčení S je průsečík této kolmice s osou otáčení r. Poloměr otáčení je přepona pravoúhlého trojúhelníka SA[A], přičemž A[A] = A(A). Otočená poloha bodu A je A 0. Další otočené body můžeme sestrojit pomocí pravoúhlé afinity s osou r a dvojicí odpovídajících si bodů A A 0. (obr. 2.3) Obr
. Otočená poloha bodu A je A 0.")
12 2.4. Průnik přímky a s rovinou α Při hledání bodu, kde přímka protne rovinu, se užívá většinou jedna z následujících konstrukcí: přímkou a proložíme např. prvou promítací rovinu σ a určíme průsečnici r = α σ. Hledaný bod je průsečík R = r a. využijeme krycí přímky m a, m α. Najdeme prvý průmět přímky m 1, potom m 1 a 1 = R 1 a na ordinále najdeme průsečík R a. Kdyby daná rovina byla axonometrická průmětna, nalezli jsme tímto axonometrický stopník dané přímky. (obr. 2.4) Obr Skutečná velikost úsečky Při zjišťování skutečné velikosti úsečky AB p sklopíme axonometricky promítací rovinu α přímky p tak, že sklopíme dva její různé body. Budeme zjišťovat jejich vzdálenost od axonometrické průmětny, proto je vhodné využít axonometrického stopníku přímky. Ten zjistíme pomocí prvé promítací roviny α přímky p. Jako druhý bod 12
 Obr. 2.4 2.5. Skutečná velikost úsečky Při zjišťování skutečné velikosti úsečky AB p sklopíme axonometricky promítací rovinu α přímky p tak, že sklopíme dva její různé body.")
13 vezmeme např. půdorysný stopník P přímky p. Jeho vzdálenost od axonometrické průmětny je stejná, jako vzdálenost bodu Q od axonometrické průmětny. Bod Q je bod na rovnoběžce s XY vedené bodem P, který leží na ose x. Sklopená přímka (p) je tedy určena body (P )R a na ní určíme skutečnou velikost úsečky AB. (obr. 2.5) Obr Přímka kolmá k rovině Axonometrický průmět kolmice k k dané rovině α je kolmý k axonometrické stopě r α a prochází bodem A. K sestrojení prvého průmětu kolmice využijeme trojúhelník O12, který je tvořený stopou roviny p α, spádovou přímkou prvé průmětny procházející počátkem O1 a osou y (příp. osou x). Výška v tomto trojúhelníku spuštěná z bodu 2 je rovnoběžná s XY, výška spuštěná z bodu 1 je rovnoběžná s osou x. Výška v trojúhelníku spuštěná z bodu O tedy bude procházet průsečíkem předchozích dvou výšek a bude kolmá ke stopě roviny p α. Získali jsme směr prvého průmětu kolmice k 1 a tedy k 1 k 1, A 1 k 1. (obr. 2.6) 13
.")
14 Obr Rovina kolmá k přímce Vést daným bodem A rovinu α, která je kolmá k dané přímce k, je vlastně úloha opačná k předchozí. Nejprve najdeme směr s, se kterým bude rovnoběžná půdorysná stopa dané roviny (pomocí trojúhelníku O12) a směr r, se kterým bude rovnoběžná axonometrická stopa (kolmice na axonometrický průmět dané přímky). Poté sestrojíme libovolnou rovinu α, pro kterou platí, že p α s a r α r. Nakonec sestrojíme rovinu α, která je rovnoběžná s α a prochází zadaným bodem A (např. pomocí hlavní přímky). (obr. 2.7) 14

15 Obr Zobrazení kružnice v pomocných průmětnách Axonometrickým průmětem kružnice ležící v prvé průmětně je elipsa se středem S 1 (průmět středu kružnice). Hlavní osa je rovnoběžná s axonometrickou stopou prvé průmětny XY. Velikost hlavní poloosy je rovna poloměru kružnice. Jelikož přímky x, y, které leží v rovině kružnice, jsou k sobě kolmé, rovnoběžky s nimi vedené body A, B se protnou v bodě kružnice 1. Vedeme-li tedy hlavními vrcholy A, B rovnoběžky s osami x, y, získáme jeden bod elipsy. Tím máme elipsu jednoznačně určenou. Velikost vedlejší poloosy sestrojíme proužkovou konstrukcí. Obdobně bychom sestrojili obrazy kružnic v druhé a třetí průmětně k 2, k 3. (obr. 2.8) 15

16 Obr Zobrazení kružnice v obecné rovině Axonometrickým průmětem kružnice bude opět elipsa k se středem v axonometrickém průmětu středu kružnice S. Hlavní osa elipsy bude rovnoběžná s axonometrickou stopou a roviny kružnice α, velikost vedlejší poloosy bude rovna poloměru kružnice. Dále potřebujeme dvojici kolmých přímek v rovině α. Sestrojíme rovinu ρ p α, pro jednoduchost procházející osou z. Její bokorysná a nárysná stopa n ρ, m ρ budou splývat s osou z. Půdorysnou stopu p ρ sestrojíme jako směr kolmý k p α v prvé průmětně (viz. Rovina kolmá k přímce). Potom přímky r = α ρ a p α jsou právě touto kolmou dvojicí v rovině α a tedy rovnoběžky s nimi vedené hlavními vrcholy A, B se protnou v bodě elipsy M. Tím máme elipsu jednoznačně zadanou. Velikost vedlejší poloosy určíme pomocí proužkové konstrukce. (obr. 2.9) 16
.")
17 Obr Konstrukce elipsy jako obraz kružnice v kolineaci Obrazem kružnice k v dané kolineaci (S, o, u ) je elipsa k právě když k nemá s u žádný společný bod. Sestrojíme dvojici sdružných průměrů. K průměru kružnice p, který je kolmý na osu kolineace sestrojíme jemu odpovídající průměr elipsy p. Je-li U = p u, potom SU udává směr přímky p a dále víme, že p musí procházet bodem p o. Najdeme krajní body průměru A = p SA, B = p SB. Střed O úsečky AB je středem elipsy k. K němu nalezneme v kolineaci odpovídající bod O. Průměr sdružený k průměru p je přímka q ; O q, q p a platí tedy q o. Jemu odpovídající přímka q tedy bude procházet bodem O a bude rovnoběžná s osou kolineace. Body C, D odpovídající bodům C = q k, D = q k omezí tento druhý průměr. Nyní již můžeme Rytzovou konstrukcí sestrojit hlavní a vedlejší osu a celou elipsu k. (obr. 2.10) 17

18 Obr Konstrukce paraboly jako obraz kružnice v kolineaci Obrazem kružnice k v dané kolineaci (S, o, u ) je parabola k právě když úběžnice u je tečnou k. Sestrojíme osu paraboly a její vrchol. Je-li U dotykový bod kružnice k a úběžnice u, potom je směr osy paraboly určen přímkou SU. Směr vrcholové tečny je kolmý k SU. Vedeme-li tedy bodem S kolmici k SU, získáme na u bod V. Tečna a vedená ke kružnici z tohoto bodu, různá od úběžnice, odpovídá vrcholové tečně paraboly a a její bod dotyku A odpovídá vrcholu paraboly A. Přímku a sestrojíme z vlastnosti a a o. 18

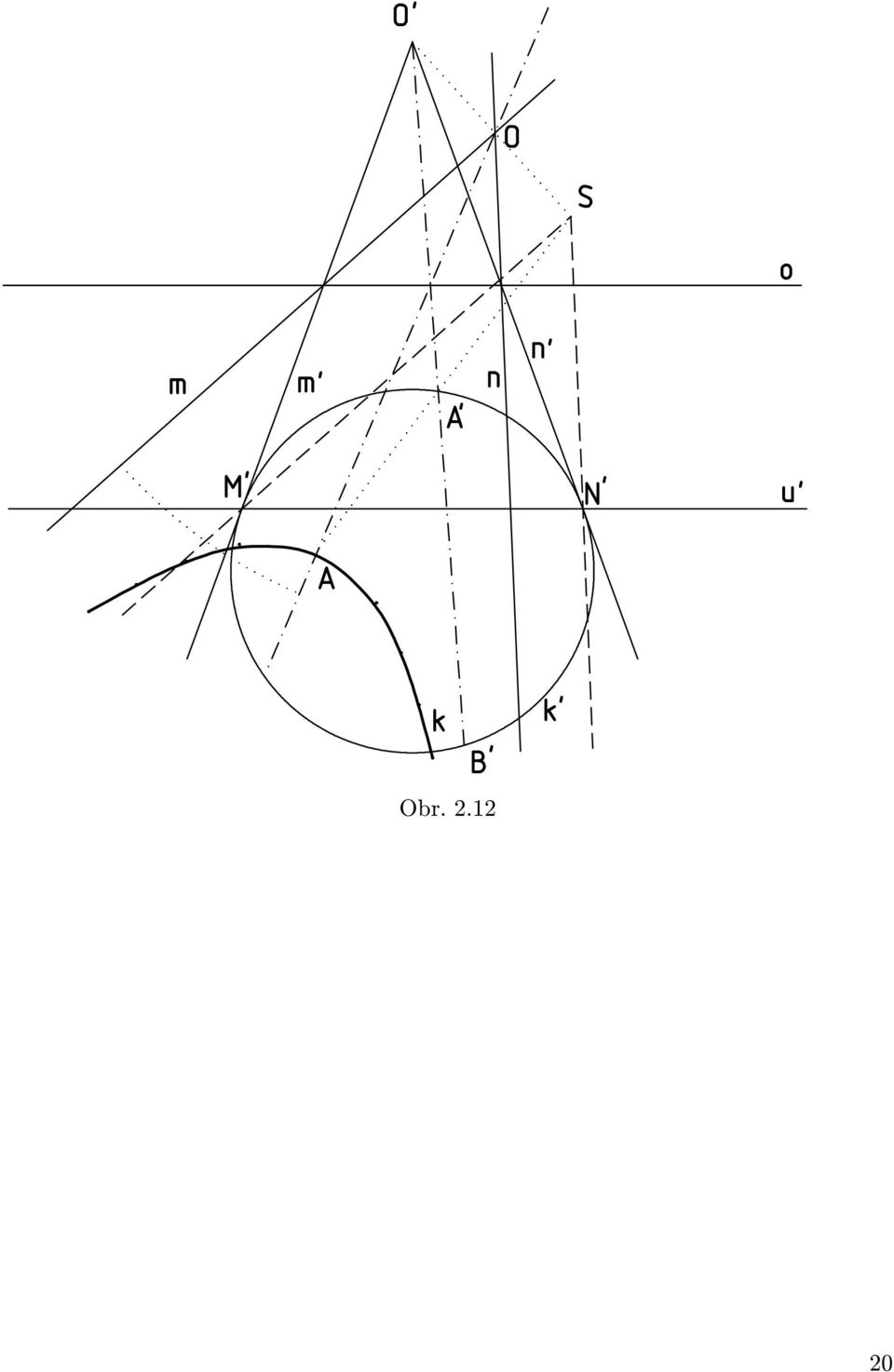
19 Pomocí kolineace můžeme sestrojit ještě např. libovolnou tečnu a poté již můžeme najít ohnisko a sestrojit parabolu. (obr. 2.11) Obr Konstrukce hyperboly jako obraz kružnice v kolineaci Obrazem kružnice k v dané kolineaci (S, o, u ) je hyperbola k, právě když u protíná kružnici k ve dvou různých bodech. Sestrojíme asymptoty a vrcholy hyperboly. Bodům M, N, ve kterých úběžnice protíná kružnici, odpovídají nevlastní body hyperboly, tedy přímky SM, SN jsou směry asymptot. Tečnám kružnice m, n sestrojeným v bodech M, N tedy v kolineaci odpovídají asymptoty hyperboly m, n. Průsečíku O = m n odpovídá střed hyperboly O. Najdeme-li osy úhlů p, q, které svírají asymptoty a jim odpovídající přímky p, q, pak právě jedna z přímek p, q protne kružnici k. Body A = k p, B = k p odpovídají vrcholům hyerboly A, B. Známe-li asymptoty, osy a vrcholy, můžeme sestrojit hyperbolu. (obr. 2.12) 19

20 Obr
21 3. Řešené úlohy 3.1. Konstrukce těles Úloha 1: Zobrazte pravidelný šestiboký hranol o výšce v = 9cm, jehož podstava se středem v bodě S a vrcholem A leží v 3 π, S 0, A[0; 4, 5; 2], x A > x A. (viz. obr. 3.1) Rozbor: Jelikož střed podstavy S a vrchol A leží v třetí pomocné průmětně, je podstava hranolu zadána jednoznačně. Jelikož neleží v axonometrické průmětně, zobrazí se podstava jako středově souměrný šestiúhelník. V každém vrcholu vztyčíme kolmici a na ni naneseme zadanou výšku ve zkrácení odpovídajícím zkrácení na ose x. Jelikož podstava leží v 3 π, budou kolmice rovnoběžné s osou x. Díky poznámce v zadání, že x-ová souřadnice bou A má být větší než x-ová souřadnice bodu A, je hranol určen jednoznačně. Úloha má jedno řešení. Řešení: otočíme rovinu 3 π do axonometrické průmětny kolem její stopy Y Z, viz. konstrukce 2.1 v otočení sestrojíme pravidelný šestiúhelník (A)(B)(C)(D)(E)(F ) se středem (S) podstavu vrátíme zpět do 3 π pomocí osové afinity; osa afinity je Y Z, směr kolmý, dvojice odpovídajících si bodů S (S), A (A) každým vrcholem vedeme rovnoběžku s osou x a naneseme na ni zkrácenou výšku hranolu v kladném směru osy x získáme body horní podstavy A B C D E F viditelnost 21
22 Obr. 3.1 Úloha 2: Zobrazte jehlan, jehož podstavu tvoří pravidelný šestiúhelník v rovině ρ(8; 5; ), A[5;?; 0], B[?; 4; 0]. Jeho vrcholem je bod V [2, 5; 12; 2, 5]. XY = 9, XZ = 9, 5, Y Z = 11, 5 (viz. obr. 3.2) Rozbor: Jelikož podstava jehlanu leží v rovině ρ, jsou vrcholy podstavy A, B zadány jednoznačně. Z vlastností pravidelného šestiúhelníka plyne, že střed podstavy S je stejně vzdálen od bodu A i B a tato vzdálenost je rovna velikosti úsečky AB, tedy SA = SB = AB. Takové body existují v rovině ρ právě dva, z nichž jeden si zvolíme a sestrojíme podstavu jehlanu. Vrchol jehlanu je zadán jednoznačně souřadnicemi. 22
23 Úloha má dvě řešení. Řešení: otočíme rovinu ρ do axonometrické průmětny podle její axonometrické stopy r, viz. konstrukce 2.3 v otočení sestrojíme pravidelný šestiúhelník A 0 B 0 C 0 D 0 E 0 F 0 se středem S 0 podstavu vrátíme zpět do roviny ρ pomocí osové afinity; osa afinity je přímka r, směr kolmý k ose, dvojice odpovídajících si bodů A A 0, B B 0 vrchol jehlanu V spojíme se všemi vrcholy podstavy viditelnost Obr
24 Úloha 3: Sestrojte pravidelný čtyřboký jehlan, znáte-li jeho osu o = V P, vrchol V a vrchol podstavy A. V [4; 7; 7], P [2; 1; 0], A[ 1; 3; 0]. (viz. obr. 3.3) Rozbor: Z vlastností pravidelného čtyřbokého jehlanu plyne, že osa jehlanu je kolmá na rovinu podstavy. Vedeme-li tedy vrcholem podstavy A rovinu α kolmou k ose o, bude právě tato rovina rovinou podstavy jehlanu. Průsečík S; S = α o je střed podstavy jehlanu. Máme-li vrchol podstavy a její střed, můžeme v otočení snadno sestrojit celou podstavu - čtverec ABCD. Úloha má jedno řešení. Řešení: sestrojíme rovinu α; A α, α o, viz. konstrukce 2.7 nalezneme střed podstavy jako průsečík osy jehlanu s rovinou podstavy S; S = α o, viz. konstrukce 2.4 v otočení sestrojíme podstavu A 0 B 0 C 0 D 0, viz. konstrukce 2.3 body podstavy vrátíme zpátky do axonometrické průmětny zobrazíme jehlan ABCDV viditelnost 24
25 Obr. 3.3 Úloha 4: Zobrazte rotační válec s podstavou v 1 π, která se dotýká os x, y; r = 2, 5cm, výška válce v = 4cm. (viz. obr. 3.4) Rozbor: Podstavou rotačního válce je kružnice o poloměru r, která se má dotýkat dvou přímek (souřadnicových os x, y). Střed kružnice proto bude na ose úhlu těchto přímek. Dále střed musí mít od daných přímek vzdálenost r, leží tedy na rovnoběžce s jednou z nich vzdálené r. Jelikož takové rovnoběžky existují právě dvě, budou i středy podstavy 25
26 dva. Z nich si vybereme jeden a sestrojíme podstavu. Ve středu podstavy vztyčíme kolmici, na kterou naneseme výšku válce ve zkrácení. Výšku můžeme nanést v obou směrech. Protože podstava válce leží v 1 π, bude kolmice rovnoběžná s osou z a také zkrácení velikosti bude stejné jako na ose z. Jelikož je horní podstava rovnoběžná s dolní, zobrazí se obě podstavy stejně (elipsy se stejnou velikostí vedlejší poloosy). Úloha má čtyři řešení. Řešení: otočíme 1 π do axonometrické průmětny kolem XY, viz. konstrukce 2.1 sestrojíme osu úhlu XO 0 Y ve vzdálenosti 2, 5cm vedeme rovnoběžku s y 0 průsečík těchto přímek určuje bod S 0, který vrátíme zpět do 1 π sestrojíme podstavnou kružnici, viz. konstrukce 2.8 bodem S vedeme přímku rovnoběžnou s osou z a naneseme výšku válce v kladném směru sestrojíme horní podstavu viditelnost 26
27 Obr
28 Úloha 5: Rotační kužel má podstavu v 1 π, S[4; 4; 0], r = 3cm. Přímka t je tečnou kužele. Sestrojte tento kužel. (viz. obr. 3.5) Rozbor: Podstava kužele je zadána jednoznačně středem a poloměrem. Tečná rovina kužele je jednoznačně určena dvěma různoběžkami. Za jednu z nich vezmeme zadanou tečnu t. Druhou dourčíme tak, že najdeme průnik tečny t s rovinou podstavy kužele a z tohoto bodu vedeme tečnu k podstavě (vybereme jednu ze dvou možností). Jelikož podstava leží v 1 π, je průnik t 1 π = P t půdorysný stopník přímky t a tečna vedená z tohoto bodu k podstavě je stopou tečné roviny τ. Pomocí bokorysného stopníku přímky t určíme bokorysnou stopu m τ. Osa kužele o prochází středem podstavy S a je k podstavě kolmá. Vzhledem k poloze podstavy tedy bude osa kužele rovnoběžná s osou z. Všechny tečné roviny kužele prochází jeho vrcholem. Zároveň vrchol kužele leží někde na ose o. Můžeme jej tedy sestrojit jako průnik osy kužele a tečné roviny. Úloha má dvě řešení. Řesení: sestrojíme podstavu kužele, viz. konstrukce 2.8 určíme bod P t ; P t = t 1 π = t t 1 z bodu P t vedeme tečnu p τ k podstavě pomocí přímky t dourčíme bokorysnou stopu m τ sestrojíme osu válce o; o z, S o v rovině τ určíme přímku q tak, že S q 1 q o je průnik přímky t s rovinou τ, a tedy vrchol kužele V = o q z bodu V vedeme tečny k podstavě viditelnost 28
29 Obr
30 Úloha 6: Sestrojte kulovou plochu κ se středem v bodě S[0; 0; 4], je-li dána její tečná rovina τ svými stopami p τ, n τ, m τ. (viz. obr. 3.6) Rozbor: Kulová plocha κ(s; r) se v pravoúhlé axonometrii zobrazí jako kružnice se středem v bodě S o poloměru r. Pro dourčení poloměru kulové plochy vedeme bodem S kolmici k k tečné rovině τ. V místě, kde ji protne, je bod dotyku A kulové plochy a tečné roviny. Jelikož pro každý bod M kulové plochy platí MS = r, určuje velikost úsečky AS poloměr kulové plochy κ. Úloha má jedno řešení. Řešení: sestrojíme kolmici k; S k, k τ, viz. konstrukce 2.6 určíme průnik přímky k s rovinou τ: k τ = A, viz. konstrukce 2.4 určíme skutečnou velikost úsečky AS, viz. konstrukce 2.5 κ(s; r = AS ) 30
31 Obr Řezy těles Úloha 7: Zobrazte řez pravidelného pětibokého hranolu, jehož jedna podstava leží v 1 π, A[4, 4; 0; 0], B[7, 1; 2, 9; 0], v = 8, 8cm, rovinou ρ = (36, 6; 9; 6, 1). (viz. obr. 3.7) Rozbor: Jelikož hrana AA leží v nárysně, bod K = AA n ρ je bodem řezu. Mezi rovinou podstavy hranolu a rovinou řezu existuje osová afinita. Osa afinity je průsečnice těchto dvou rovin, tedy půdorysná stopa p ρ. Směr afinity je směr povr- 31
32 chových přímek hranolu a dvojice odpovídajících si bodů A K. Potom platí např. L BB, AB KL p ρ a obdobně i pro body M, N, P. Řešení: sestrojíme hranol, obdobně jako v úloze 1 určíme bod řezu K; K = AA n ρ pomocí afinity sestrojíme body řezu na zbylých hranách viditelnost Obr
33 Úloha 8: Zobrazte řez pravidelného šestibokého jehlanu s podstavou v 1 π, A[5, 2; 1, 1; 0], D[1, 5; 6; 0], v = 9, 6cm rovinou ρ = (8, 1; 42, 2; 7, 9). (viz. obr. 3.8) Rozbor: Proložíme-li vrcholem V prvou promítací rovinu a najdeme její průsečnici s rovinou řezu r, potom tato průsečnice určí na hranách AV, DV body řezu K, L. Mezi rovinou řezu a rovinou podstavy jehlanu existuje středová kolineace. Osu kolineace tvoří průsečnice těchto dvou rovin, tedy p ρ, střed kolineace je vrchol jehlanu V a dvojice odpovídajících si bodů A K, D L. Jelikož přímky odpovídající si v kolineaci se protínají na ose kolineace, můžeme na zbývajících hranách dourčit body řezu. Řešení: sestrojíme jehlan vrcholem V sestrojíme prvou promítací rovinu (kolmou k 1 π) určíme její průsečnici r s rovinou řezu najdeme body řezu K = r AV, L = r DV pomocí středové kolineace dourčíme body řezu na zbylých hranách viditelnost 33
34 Obr. 3.8 Úloha 9: Je dán rotační válec s podstavou v 1 π, S[5, 3; 7; 0], r = 5, 2cm, v = 14cm a bod X[11, 8; 0; 0]. Sestrojte řez válce rovinou, která prochází bodem X takový, že se dotýká obou podstav válce. (viz. obr. 3.9) Rozbor: Řez rotačního válce rovinou, která není rovnoběžná s osou válce, ani na ni není kolmá, je elipsa. Půdorysná stopa roviny řezu p ρ je tečnou z bodu X k podstavě válce (vybereme jednu ze dvou možných). Bod dotyku T je bodem řezu. 34
35 Jelikož se má řez dotýkat obou podstav, bude středem elipsy střed O osy válce SS. Přímka T O protne horní podstavu v bodě T, což je další bod řezu. Mezi rovinou podstavy a rovinou řezu existuje osová afinita. Osou afinity je průsečnice těchto dvou rovin, tedy p ρ. Směr afinity je rovnoběžný s osou válce, dvojice odpovídajících si bodů S O. Úloha má dvě řešení. Řešení: zobrazíme válec sestrojíme tečnu z bodu X k podstavě, určíme bod dotyku T najdeme střed osy válce O a bod T k průměru T T sestrojíme jemu odpovídající průměr v podstavě T S k němu nalezneme průměr sdružený A B pomocí afinity sestrojíme průměr AB Rytzovou konstrukcí zobrazíme elipsu body G, H, kde se řez dotýká obrysu válce a v nichž se mění viditelnost určíme jako afinní obrazy bodů G, H, což jsou body dotyku obrysových přímek s podstavnou kružnicí k viditelnost 35
36 Obr
37 Úloha 10: Zobrazte rotační kužel s podstavou v 2 π, S[5; 0; 7], r = 6cm, výška kužele v = 12cm, y V > 0 a řez tohoto kužele rovinou ρ( ; 5; 11). (viz. obr. 3.10) Rozbor: Sestrojením vrcholové roviny δ ρ, V δ zjistíme, že stopa n δ neprotíná podstavnou kružnici kužele, tudíž řezem bude elipsa. Zde je pro zachování názornosti sestrojena pouze stopa m δ. Mezi rovinou řezu a rovinou podstavy existuje středová kolineace, jejíž osa je průsečnice těchto rovin, tedy n ρ, střed kolineace je vrchol kužele V. Řez sestrojíme tedy jako obraz podstavné kružnice kužele v kolineaci. Jelikož nárysná stopa n ρ protíná podstavu kužele, nebude řezem celá elipsa, ale pouze část. Body G, H, kde se řez dotýká obrysu kužele najdeme jako kolineární obrazy bodů G, H, ve kterých se obrysové přímky kužele dotýkají podstavy. V bodech G, H se mění viditelnost. Řešení: zobrazíme kužel sestrojíme vrcholovou rovinu δ ρ, V δ (její bokorysnou stopu m δ ) v rovině ρ sestrojíme přímku AB, jejíž druhý průmět A B prochází středem podstavné kružnice S v kolineaci se středem V, osou n ρ a dvojicí odpovídajících si přímek AB A B sestrojíme řez kužele, viz. konstrukce 2.10 viditelnost 37
38 Obr
39 Úloha 11: Zobrazte rotační kužel s podstavou v rovině α 1 π, S[6; 8; 11], r = 5, 5cm, V 1 π. Dourčete rovinu ρ(5; 9;?) tak, aby řezem kužele touto rovinou byla parabola. Řez zobrazte. (viz. obr. 3.11) Rozbor: Řezem kužele rovinou ρ je parabola, právě když je odchylka roviny ρ od roviny podstavy kužele stejná jako odchylka povrchových přímek kužele a roviny podstavy kužele. Ke každé takové rovině ρ existuje i vrcholová rovina δ ρ, V δ. Zřejmě tato rovina δ je tečnou rovinou kužele. Vedeme-li vrcholem kužele V přímku rovnoběžnou s p ρ, získáme půdorysnou stopu roviny δ, tedy d p ρ, V d, d = p δ. V rovině podstavy α vedeme tečny k podstavě kužele t, u rovnoběné s přímkou d. Jednu z nich vybereme, např. t a rovina δ potom bude jednoznačně určená přímkami d, t. Jelikož přímka leží v rovině α, můžeme snadno určit její stopníky a stopy roviny m δ, n δ. Stopy roviny řezu ρ budou se stopami roviny δ rovnoběžné. Mezi rovinou řezu a rovinou podstavy kužele existuje středová kolineace. Střed kolineace je vrchol kužele V, osou kolineace je přímka o = α ρ a úběžnice je přímka t. Je tedy jednoznačně zadána a řez sestrojíme jako kolineární obraz podstavy kužele. Označíme-li T bod, ve kterém se obrysová přímka kužele dotýká podstavy, jemu odpovídající bod v kolineaci T je bod, ve kterém se řez dotkne obrysu kužele. V tomto bodě se tedy také bude měnit viditelnost. Úloha má dvě řešení. Řešení: zobrazíme kužel přímka d : V d, d p ρ tečny k podstavě kužele t, u rovnoběžné s d m δ, n δ, n ρ, m ρ osa kolineace o : o = ρ α sestrojíme parabolu jako obraz podstavy kužele v kolineaci zadané středem V, 39
40 osou o a úběžnicí t, viz. konstrukce 2.11 body P, Q, ve kterých osa kolineace protíná podstavu kužele jsou součástí řezu viditelnost Obr
41 Úloha 12: Sestrojte rotační kužel s podstavou v π 1, S[7; 8; 0], r = 6cm a vrcholem V [7; 8; 13] a řez tohoto kužele rovinou ρ( 10; 3; 9). (viz. obr. 3.12) Rozbor: Určíme vrcholovou rovinu δ; δ ρ, V δ. Její půdorysná stopa p δ protne podstavu kužele ve dvou různých bodech a proto řezem kužele rovinou ρ je hyperbola. Mezi rovinou řezu a rovinou podstavy kužele existuje středová kolineace. Středem kolineace je vrchol kužele V, osou je průsečnice těchto rovin, tedy p ρ a úběžnicí je p δ. Bod G, kde se řez dotkne obrysu kužele sestrojíme jako kolineární obraz bodu G, ve kterém se obrysová přímka dotýká podstavné kružnice. V bodě G se mění viditelnost. Úloha má jedno řešení. Řešení: zobrazíme kužel určíme půdorysnou stopu roviny δ; δ ρ, V δ sestrojíme hyperbolu jako obraz podstavy kužele v kolineaci určené středem V, osou p ρ a úběžnicí p δ, viz. konstrukce 2.12 viditelnost 41
42 Obr
43 Úloha 13: Zobrazte kulovou plochu κ(s 0, r = 4) a sestrojte její řezy rovinami ρ(3, 5; ; 3, 5), ρ ( 3, 5; ; 3, 5). (viz. obr. 3.13) Rozbor: Axonometrickým průmětem kulové plochy je kružnice, jejíž střed je ve středu kulové plochy a poloměr se rovná poloměru kulové plochy. Řezem kulové plochy rovinou ρ je kružnice se středem v bodě K; K = k ρ, kde k je kolmice k rovině ρ vedená středem kulové plochy S. Při určování průsečíku k ρ si všimněme, že přímka k leží v 2 π, a tedy průsečík K = k ρ = k n ρ. Její poloměr odvodíme z pravoúhlého trojúhelníka, jehož jednou odvěsnou je úsečka SK a přepona má velikost r. Skutečnou velikost úsečky SK určíme ve sklopení. Velikost odvěsny (S)(P ) je velikost poloměru kružnice řezu. Řez kulové plochy sestrojíme jako obraz kružnice v obecné rovině, pro niž známe střed a poloměr. Jelikož je rovina ρ souměrná s rovinou ρ podle středu kulové plochy, bude mít kružnice řezu touto rovinou stejný poloměr. Jejím středem bude bod K ; K = k ρ = k n ρ. Úloha má v každé rovině jedno řešení. Řešení: zobrazíme kulovou plochu sestrojíme kolmici k k rovině ρ bodem S, viz. konstrukce 2.6 určíme průsečík přímky k s rovinami ρ, ρ ; k ρ = K, K ρ = K otočením 2 π určíme skutečnou velikost úsečky SK, viz. konstrukce 2.1 sestrojíme trojúhelník (S)(K)(P ); (K)(P ) = r obraz kružnice v rovině ρ se středem v bodě K a poloměrem (S)(P ) obraz kružnice v rovině ρ se středem v bodě K a poloměrem (S)(P ) viditelnost 43
44 Obr Osvětlení Pro větší názornost se někdy využívá osvětlení zobrazovaných útvarů. Jelikož je osvětlení poměrně složitá záležitost, zavádíme místo přirozeného osvětlení tzv. abstraktní osvětlení, u kterého nebereme v úvahu činitele jako jsou např. povrch tělesa, ubývání intenzity světla se vzdáleností, rozptyl světla aj.při rovnoběžném osvětlení předpokládáme, že všechny světelné paprsky jsou směru s a na část roviny kolmé k danému směru dopadá vždy stejné množství světla, ať ji jakkoli posuneme. 44
45 Zpravidla určujeme mez stínu vrženého na průmětny, mez stínu vlastního a u dutých těles mez stínu vrženého do dutiny. Platí, že mez stínu vrženého je stínem meze stínu vlastního. Tedy tvoří-li např. mez stínu vrženého body BF G H D, přičemž A, resp. A jsou vržené stíny bodu A na půdorysnu, resp. bokorysnu, pak mez stínu vlastního budou tvořit body BF GHD. K určení stínu vrženého do dutiny se používá tzv. metoda zpětných světelných paprsků, tedy ze stínu vrženého na půdorysnu určíme, kam na těleso dopadají stíny osvětlených hran. Při osvětlování bodu A vedeme tímto bodem světelný paprsek a určíme jeho stopník. Zda bod vrhá stín do půdorysny, nárysny, nebo bokorysny záleží na tom, kterou z nich protne paprsek jako první. Při osvětlování přímky a vedeme světelný paprsek každým bodem této přímky, čímž vznikne tzv. světelná rovina. Stopy světelné roviny jsou vrženým stínem přímky a. Zřejmě k určení vrženého stínu přímky na průmětnu stačí určit vržený stín dvou jejích různých bodů. Úloha 14: Zobrazte rovnoběžné osvětlení duté krychle ABCDEF GH s podstavou ABCD v 1 π, je-li dán směr osvětlení s. (viz. obr. 3.14, 3.15) Rozbor: Jelikož stěna ABCD leží v půdorysně, stačí určit vržený stín stěny EF GH. Bodem E vedeme rovnoběžku s s a půdorysem bodu E, tedy bodem A vedeme rovnoběžku s s 1. Průsečík těchto přímek je bod E, což je stím bodu E do 1 π. Stejným postupem určíme vržené stíny bodů F, G, H. V prvním případě padne vržený stín stěny EF GH celý do 1 π (obr. 3.14), ovšem ve druhém případě leží body G, H až za 3 π. Je tedy zřejmé, že krychle bude vrhat stín jak na 1 π, tak na 3 π. Určíme bokorysné stopníky přímek GG a HH. Body G a H jsou vržené stíny bodů G, H na 3 π. Přímky V této práci nebudeme pro přehlednost vyznačovat mez stínu vlastního a dáme přednost určení stínu vrženého do dutiny. 45
46 F G a F G se protínají na ose y (obr ) Metodou zpětných světelných paprsků určíme stín vržený do dutiny. V prvním případě vidíme, že se protínají úsečky E H a CG. Tímto průsečíkem vedeme rovnoběžku s s a zjistíme stín hrany EH na hranu CG. Rovnoběžka s hranou BF vedená průsečíkem BC AE protne světelný paprsek jdoucí bodem E v bodě, který je stínem bodu E na stěnu BCGF. Tímto je určen stín vržený do dutiny (obr ). Ve druhém případě se protínají úsečky E F a CG, tedy na hranu CG dopadá stín úsečky EF. Stejným postupem jako v předchozím případě určíme stín bodu E, ale tentokrát na stěnu CDHG (obr. 3.15). Řešení: bodem E vedeme rovnoběžku s s bodem A vedeme rovnoběžku s s 1 v průsečíku těchto dvou přímek je stín bodu E do 1 π - bod E analogicky určíme stíny zbývajících bodů horní podstavy na půdorysnu určíme mez stínu vrženého na půdorysnu je-li potřeba, určíme bokorysné stopníky přímek rovnoběžných s s a tím stín vržený na bokorysnu (obr. 3.15) metodou zpětných světelných paprsků určíme stín vržený do dutiny 46
47 Obr Obr
48 Úloha 15: Rovnoběžně osvětlete dutý šestiboký jehlan s podstavou v rovině α 1 π, z α = 6cm, V 1 π, je-li dán směr osvětlení s. (viz. obr. 3.16) Rozbor: Všemi body podstavy vedeme rovnoběžky s s. Určíme půdorysy bodů podstavy a těmi vedeme rovnoběžky s s 1. Průsečíky odpovídajících si přímek určují vržené stíny jednotlivých bodů do 1 π. Celý vržený stín padne do půdorysny. Metodou zpětných světelných paprsků určíme stín hrany AF na hrany V B a V C a stín hrany EF na hranu V D. Průsečíkem V F C D vedeme rovnoběžku s s. Ta protne hranu CD v bodě P. Průsečík P V F F je stín bodu F do stěny V CD. Řešení: určíme prvé průměty bodů podstavy jehlanu bodem A vedeme rovnoběžku s s bodem A 1 vedeme rovnoběžku s s 1 v průsečíku těchto dvou přímek je stín bodu A vržený na 1 π - bod A analogicky určíme stíny zbývajících bodů podstavy na půdorysnu určíme mez stínu vrženého na půdorysnu metodou zpětných světelných paprsků určíme stín vržený do dutiny 48
49 Obr Úloha 16: Rovnoběžně osvětlete dutý rotační kužel s podstavou v rovině rovnoběžné s půdorysnou a vrcholem v půdorysně, je-li zadán směr osvětlení. (viz. obr. 3.17) Rozbor: Vedeme-li každým bodem podstavné kružnice přímku rovnoběžnou se směrem, dostaneme šikmou válcovou plochu. Při zobrazování stínu vrženého do roviny vlastně hledáme řez této válcové plochy danou rovinou. Vrženým stínem do průmětny tedy bude elipsa nebo kružnice. Jelikož je rovina podstavy kužele rovnoběžná s půdorysnou, bude stín vržený do půdorysny ve skutečnosti kružnice shodná s podstavnou kružnicí kužele a 49
50 zobrazí se jako elipsa. Stačí určit stín středu podstavné kružnice do půdorysny. Velikosti poloos známe. Při určování stínu vrženého na bokorysnu určíme stíny bodů A, B, C, D. Jelikož je AB hlavní osa a CD vedlejší osa, budou A B a C D sdružené průměry a pomocí Rytzovy konstrukce můžeme snadno sestrojit stín vržený na bokorysnu. Stín vržený do dutiny je částí průnikové křivky dané kuželové plochy a vzniklé šikmé válcové plochy. Jelikož jsou válcová i kuželová plochy 2. stupně, bude jejich průniková křivka 4. stupně. Ta se ovšem rozpadne na kružnici (podstavná kružnice kužele) a další křivku, která tudíž musí být také 2. stupně. Stín vržený do dutiny tedy můžeme sestrojit bodově metodou zpětných světelných paprsků nebo pomocí afinity. Osou afinity bude přímka KM, kde body K, M určují mez vlastního stínu na kuželi a směr afinity je směr osvětlení. Bod na obryse T určíme metodou zpětných světelných paprsků. Nechť L je bod, kde se obrysová přímka kužele dotýká podstavné kružnice. V L protne stín podstavné kružnice v bodě T. Tím vedeme rovnoběžku s s, která protne obrysovou přímku v bodě T. Řešení: určíme stín S středu podstavy kužele S na půdorysnu sestrojíme stín podstavy vržený na půdorysnu tečny z bodu V k této elipse společně s ní tvoří mez stínu vrženého na půdorysnu body A, B, C, D vedeme rovnoběžky s s a určíme jejich bokorysné stopníky Rytzovou konstrukcí sestrojíme díky sdruženým průměrům A B a C D stín vržený na bokorysnu stín vržený do dutiny sestrojíme bodově metodou zpětných světelných paprsků 50
51 Obr Úloha 17: Zobrazte osvětlení skupiny těles, je-li dán směr osvětlení s. (viz. obr. 3.18) Rozbor: Nejprve zobrazíme vržené stíny obou těles na průmětny. Vidíme, že jehlan vrhá stín nejen na průmětny, ale také na hranol. Mez stínu vrženého do půdorysny jehlanem tvoří body CV F, takže při určování stínu vrženého na hranol už budeme pracovat pouze s vrcholy C, F, V. Určíme stín jehlanu vržený do roviny π, π 1 π, z π = MK a π, π 1 π, z π = MK 2. Body C, S, F vedeme rovnoběžky s osou z a na ně naneseme velikost MK. Tak dostaneme body C, S, F π. Nechť v s, V v a v s 1, S v, potom v v = V. V je vržený stín vrcholu V na rovinu π a tedy na stěnu hranolu KQQ K. Spojíme-li V s C a F, dostaneme body na hraně KK. Obdobně nalezneme stín vržený jehlanem na rovinu π a tím získáme body na 51
52 hraně LL. Na hraně MM je mez stínu určena průsečíky s přímkami V C, V F. Tím máme stín vržený jehlanem na hranol určený. Řešení: určíme stín obou těles vržený na průmětny na kolmice k 1 π v bodech C, F, S naneseme vzdálenost MK a tím získáme body C, F, S. sestrojíme přímku v; V v, v s sestrojíme přímku v, S v, v s 1 v v = V na kolmice k 1 π v bodech C, F, S naneseme vzdálenost MK 2 a tím získáme body C, F, S. sestrojíme přímku v, S v, v s 1 v v = V body V C MM, V F MM, V C LL, V F LL, V C KK, V F K, V tvoří mez stínu vrženého jehlanem na hranol Obr
53 3.4. Průnik těles Jsou-li v prostoru umístěna dvě tělesa tak, že mají nějakou část společnou, pak hovoříme o tzv. průniku těles. Místo abychom hledali všechny společné body, hledáme většinou pouze průnik povrchů těchto těles. Hledáním průniku více než dvou těles se v této práci zabývat nebudeme. Průnikem dvou těles je prostorová křivka. Při průniku dvou hranatých těles je to prostorová lomená čára, jejíž každý vrchol leží na některé hraně jednoho z těles. Při průniku dvou oblých těles (rotační kužel, rotační válec) vznikne obecně prostorová křivka čtvrtého stupně, jelikož rotační kužel i rotační válec jsou plochy druhého stupně. Ta se ovšem může rozpadnout na více křivek, např. na dvě křivky druhého stupně. Průnik hranatého tělesa s oblým můžeme chápat také jako řezy oblého tělesa jednotlivými stranami tělesa hranatého a jelikož řez oblého tělesa rovinou je obecně kuželosečka, bude průniková křivka složena z částí různých kuželoseček. Při hledání průniku využíváme pomocných ploch - nejčastěji rovin, příp. kulových ploch, a to takových, které protnou obě daná tělesa v co nejjednodušších křívkách (přímky, kružnice). Průsečíky odpovídajících si řezů jsou body průniku. Případ, kdy pomocná rovina protne těleso v kružnici, se v axonometrii moc nevyužívá, neboť zobrazení kružnice v obecné rovině není jednoduchá konstrukce. Volíme proto většinou roviny rovnoběžné se směrem tvořicích přímek, příp. procházející vrcholem tělesa. Je-li některá z pomocných rovin pro jedno těleso hraniční a protne druhé těleso, vymezí na něm tzv. lichou část, tedy část tělesa, která není součástí průniku. Pomocí lichých částí můžeme průnik těles rozdělit na 3 typy: úplný řez (obr. 3.19, 3.20): lichá část existuje pouze na jednom tělese, tedy všechny hrany jednoho tělesa protínají druhé těleso (ale ne naopak), částečný řez (obr. 3.18): lichá část existuje na obou tělesech, tedy na obou tělesech existují hrany, které druhé těleso protínají, i hrany, které jej neprotínají, dokonalý řez: lichá část neexistuje ani na jednom z těles, tedy všechny hrany jednoho tělesa protínají druhé a naopak. 53
54 V příkladech uvedených v této práci bude postup hledání průniku těles vždy stejný. Využijeme svazku rovin, které budou procházet vrcholem jehlanu, příp. kužele a zároveň budou směrovými rovinami hranolu, příp. válce. Určíme řezy na jednotlivých tělesech a pro přehlednost odpovídající si řezy očíslujeme. Potom už stačí pouze určit průsečíky odpovídajících si řezů a viditelnost. Platí, že bod průnikové křivky je viditelný, pokud leží ve viditelné části prvního a zároveň druhého tělesa. V ostatních případech je neviditelný. Úloha 18: Sestrojte průnik pravidelného trojbokého hranolu s podstavou v 2 π s pravidelným čtyřbokým jehlanem s podstavou v 1 π. (viz. obr. 3.19) Řešení: sestrojíme svazek rovin procházejících vrcholem jehlanu V rovnoběžných s bočními hranami hranolu rovina vedená bodem K určí lichou část na jehlanu rovina vedená bodem D určí lichou část na hranolu dále má smysl vést roviny vrcholy M, A, C určíme řezy obou těles těmito rovinami (přímky), pro přehlednost číslujeme odpovídající si řezy se protnou v bodech průnikové křivky viditelnost 54
55 Obr Úloha 19: Sestrojte průnik rotačního kužele s podstavou v 2 π s rotačním válcem s podstavou v 1 π. (viz. obr. 3.20) Řešení: sestrojíme svazek rovin procházejících vrcholem kužele V rovnoběžných s površkami válce tečné roviny kužele určí liché části na válci na kuželi nejsou žádné liché části vedeme dostatečný počet rovin, které protínají obě tělesa 55
56 určíme řezy obou těles těmito rovinami(přímky), pro přehlednost číslujeme odpovídající si řezy se protnou v bodech průnikové křivky viditelnost Obr
57 Úloha 20: Sestrojte průnik rotačního válce s podstavou v 2 π s pravidelným čtyřbokým jehlanem s podstavou v 1 π. (viz. obr. 3.21) Řešení: sestrojíme svazek rovin procházejících vrcholem jehlanu V rovnoběžných s površkami válce roviny vedené vrcholy A, C určí liché části na válci na jehlanu nejsou žádné liché části vedeme dostatečný počet rovin, které protínají obě tělesa určíme řezy obou těles těmito rovinami(přímky), pro přehlednost číslujeme odpovídající si řezy se protnou v bodech průnikové křivky viditelnost 57
58 Obr
59 Použitá literatura 1. Urban, A.,Deskriptivní geometrie I., 1. vydání. Praha:SNTL, Kadeřávek, F., Klíma, J., Kounovský, J., Deskriptivní geometrie I., 3. vydání. Praha:ČSAV, Drábek, K. a kol., Deskriptivní geometrie II, 2. vydání. Praha:SNTL,
MONGEOVO PROMÍTÁNÍ - 2. část
 MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE PLOCHY A OBLÁ TĚLESA V KOSOÚHLÉM PROMÍTÁNÍ DO PŮDORYSNY DIPLOMOVÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok
AXONOMETRIE - 2. část
 AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
MONGEOVO PROMÍTÁNÍ. bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po dlouhou dobu bylo vojenským tajemstvím
 po dlouhou dobu bylo vojenským tajemstvím") část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
Je-li dána hranolová nebo jehlanová plocha s podstavou v rovině σ a rovina řezu ρ:
 Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
Kapitola 1 Elementární plochy 1.1 Základní pojmy Elementární plochou budeme rozumět hranolovou, jehlanovou, válcovou, kuželovou a kulovou plochu. Pokud tyto plochy omezíme, popř. přidáme podstavy, můžeme
MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]
![MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]](/thumbs/55/35543113.jpg "MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]") ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Pracovní listy MONGEOVO PROMÍTÁNÍ
 Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
BA008 Konstruktivní geometrie. Kolmá axonometrie. pro kombinované studium. učebna Z240 letní semestr
 BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
BA008 Konstruktivní geometrie pro kombinované studium Kolmá axonometrie Jan Šafařík Jana Slaběňáková přednášková skupina P-BK1VS1 učebna Z240 letní semestr 2016-2017 31. března 2017 Základní literatura
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta. ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) ---
 ---") DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
DESKRIPTIVNÍ GEOMETRIE - elektronická skripta ŘEZY HRANOLŮ A JEHLANŮ V MONGEOVĚ PROMÍTÁNÍ (sada řešených příkladů) --- PŘÍKLA: A4 na výšku, O [10,5; 9,5] Pravidelný šestiboký hranol má podstavu v půdorysně
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA. Mgr. Ondřej Machů. --- Pracovní verze:
 DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
0 x 12. x 12. strana Mongeovo promítání - polohové úlohy.
 strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
Pravoúhlá axonometrie
 Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
Pravoúhlá axonometrie bod, přímka, rovina, bod v rovině, trojúhelník v rovině, průsečnice rovin, průsečík přímky s rovinou, čtverec v půdorysně, kružnice v půdorysně V Rhinu vypneme osy mřížky (tj. červenou
Základní úlohy v Mongeově promítání. n 2 A 1 A 1 A 1. p 1 N 2 A 2. x 1,2 N 1 x 1,2. x 1,2 N 1
 Základní úlohy v Mongeově promítání Předpokladem ke zvládnutí zobrazení v Mongeově promítání je znalost základních úloh. Ale k porozumění následujícího textu je třeba umět zobrazit bod, přímku a rovinu
Základní úlohy v Mongeově promítání Předpokladem ke zvládnutí zobrazení v Mongeově promítání je znalost základních úloh. Ale k porozumění následujícího textu je třeba umět zobrazit bod, přímku a rovinu
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
Elementární plochy-základní pojmy
 -základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
-základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
Pravoúhlá axonometrie - osvětlení těles
 Pravoúhlá axonometrie - osvětlení těles KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles ZS 2008 1 / 39 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles
Pravoúhlá axonometrie - osvětlení těles KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles ZS 2008 1 / 39 KG - L (MZLU v Brně) Pravoúhlá axonometrie - osvětlení těles
Šroubovice... 5 Šroubové plochy Stanovte paprsek tak, aby procházel bodem A a po odrazu na rovině ρ procházel bodem
 Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE KOSOÚHLÉ PROMÍTÁNÍ DO PŮDORYSNY BAKALÁŘSKÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání: 2012 Vypracovala:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDĚCKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE KOSOÚHLÉ PROMÍTÁNÍ DO PŮDORYSNY BAKALÁŘSKÁ PRÁCE Vedoucí práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání: 2012 Vypracovala:
ŘEŠENÉ PŘÍKLADY DESKRIPTIVNÍ GEOMETRIE. ONDŘEJ MACHŮ a kol.
 ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Zobrazení a řezy těles v Mongeově promítání
 UNIVERZITA PALACKÉHO V OLOMOUCI Pedagogická fakulta Katedra matematiky Michaela Sukupová 3. ročník prezenční studium Obor: Matematika se zaměřením na vzdělávání a český jazyk se zaměřením na vzdělávání
UNIVERZITA PALACKÉHO V OLOMOUCI Pedagogická fakulta Katedra matematiky Michaela Sukupová 3. ročník prezenční studium Obor: Matematika se zaměřením na vzdělávání a český jazyk se zaměřením na vzdělávání
půdorysu; pro každý bod X v prostoru je tedy sestrojen pouze jeho nárys X 2 a pro jeho
 Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY
 ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI
 KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Deskriptivní geometrie Díl Deskriptivní geometrie,. díl Mgr. Ivona Spurná Jazyková úprava:
Deskriptivní geometrie pro střední školy. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Deskriptivní geometrie Díl Deskriptivní geometrie,. díl Mgr. Ivona Spurná Jazyková úprava:
MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA. DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě
 MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě BRNO 2006 BLANKA MORÁVKOVÁ Prohlášení: Prohlašuji, že jsem diplomovou práci vypracovala
MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA DIPLOMOVÁ PRÁCE Úlohy s prostorovými tělesy v Mongeově zobrazovací metodě BRNO 2006 BLANKA MORÁVKOVÁ Prohlášení: Prohlašuji, že jsem diplomovou práci vypracovala
AXONOMETRIE. Rozměry ve směru os (souřadnice bodů) jsou násobkem příslušné jednotky.
 jsou násobkem příslušné jednotky.") AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Technické Osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika. Bítov Blok 1: Kinematika
 Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
Využití Rhinoceros ve výuce předmětu Počítačová geometrie a grafika Bítov 13.-17.8.2012 Blok 1: Kinematika Pro lepší orientaci v obrázku je vhodné umísťovat. Nabízí se dvě rychlé varianty. Buď pomocí příkazu
Kótované promítání. Úvod. Zobrazení bodu
 Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Zadání domácích úkolů a zápočtových písemek
 Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Zobrazení hranolu. Příklad 5: Sestrojte řez pravidelného šestibokého hranolu s podstavou v půdorysně rovinou ρ. Sestrojte síť seříznuté části.
 Zobrazení hranolu Příklad 1: Zobrazte pravidelný pětiboký hranol s podstavou v půdorysně π. Podstava je dána středem S a vrcholem A. Výška hranolu je v. Určete zbývající průmět bodu M pláště hranolu. 1
Zobrazení hranolu Příklad 1: Zobrazte pravidelný pětiboký hranol s podstavou v půdorysně π. Podstava je dána středem S a vrcholem A. Výška hranolu je v. Určete zbývající průmět bodu M pláště hranolu. 1
Konstruktivní geometrie
 Konstruktivní geometrie Elipsa Úloha 1: Najděte bod M takový, aby součet jeho vzdáleností od bodů F 1 a F 2 byl 12cm; tj. F 1 M+F 2 M=12. Najděte více takových bodů. Konstruktivní geometrie Elipsa Oskulační
Konstruktivní geometrie Elipsa Úloha 1: Najděte bod M takový, aby součet jeho vzdáleností od bodů F 1 a F 2 byl 12cm; tj. F 1 M+F 2 M=12. Najděte více takových bodů. Konstruktivní geometrie Elipsa Oskulační
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Technické osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Deskriptivní geometrie II.
 Střední průmyslová škola elektrotechnická a Vyšší odborná škola Pardubice, Karla IV. 13 Deskriptivní geometrie II. Ing. Rudolf Rožec Pardubice 2001 Skripta jsou určena pro předmět deskriptivní geometrie
Střední průmyslová škola elektrotechnická a Vyšší odborná škola Pardubice, Karla IV. 13 Deskriptivní geometrie II. Ing. Rudolf Rožec Pardubice 2001 Skripta jsou určena pro předmět deskriptivní geometrie
PŘÍMKOVÉ PLOCHY. Přednáška DG2*A
 PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Prùniky tìles v rùzných projekcích
 UNIVERZITA PALACKÉHO V OLOMOUCI PØÍRODOVÌDECKÁ FAKULTA Katedra algebry a geometrie Prùniky tìles v rùzných projekcích Bakalářská práce Vedoucí práce: RNDr. Lenka Juklová, Ph.D. Rok odevzdání: 2010 Vypracoval:
UNIVERZITA PALACKÉHO V OLOMOUCI PØÍRODOVÌDECKÁ FAKULTA Katedra algebry a geometrie Prùniky tìles v rùzných projekcích Bakalářská práce Vedoucí práce: RNDr. Lenka Juklová, Ph.D. Rok odevzdání: 2010 Vypracoval:
Pravoúhlá axonometrie. tělesa
 Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
Pravoúhlá axonometrie tělesa V Rhinu vypneme osy mřížky (tj. červenou vodorovnou a zelenou svislou čáru). Tyto osy v axonometrii vůbec nevyužijeme a zbytečně by se nám zde pletly. Stejně tak můžeme vypnout
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 2. října 2006 verze 2.0 Předmluva Tento pomocný
ROTAČNÍ KVADRIKY. Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou
 ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
ROTAČNÍ KVADRIKY Definice, základní vlastnosti, tečné roviny a řezy, průsečíky přímky s rotační kvadrikou Rotační kvadriky jsou rotační plochy, které vzniknou rotací kuželosečky kolem některé její osy.
Pravoúhlá axonometrie - řezy hranatých těles
 Pravoúhlá axonometrie - řezy hranatých těles KG - L MENDELU KG - L (MENDELU) Pravoúhlá axonometrie - řezy hranatých těles 1 / 1 Příklad (Řez šikmého hranolu) Sestrojte řez šikmého čtyřbokého hranolu ABCDA
Pravoúhlá axonometrie - řezy hranatých těles KG - L MENDELU KG - L (MENDELU) Pravoúhlá axonometrie - řezy hranatých těles 1 / 1 Příklad (Řez šikmého hranolu) Sestrojte řez šikmého čtyřbokého hranolu ABCDA
Axonometrie KG - L ZS MZLU v Brně. KG - L (MZLU v Brně) Axonometrie ZS / 60
 Axonometrie ZS / 60") Axonometrie KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Axonometrie ZS 2008 1 / 60 Obsah 1 Úvod 2 Typy axonometrií 3 Pravoúhlá axonometrie Zobrazení přímky Zobrazení roviny Polohové úlohy KG - L (MZLU
Axonometrie KG - L MZLU v Brně ZS 2008 KG - L (MZLU v Brně) Axonometrie ZS 2008 1 / 60 Obsah 1 Úvod 2 Typy axonometrií 3 Pravoúhlá axonometrie Zobrazení přímky Zobrazení roviny Polohové úlohy KG - L (MZLU
Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].
![Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].](/thumbs/52/30469232.jpg "Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].") Konstruktivní geometrie Bod Axonometrie Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11]. VŠB-TU Ostrava 1 Jana Bělohlávková Konstruktivní geometrie
Konstruktivní geometrie Bod Axonometrie Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11]. VŠB-TU Ostrava 1 Jana Bělohlávková Konstruktivní geometrie
ZÁKLADNÍ ZOBRAZOVACÍ METODY
 ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
ZÁKLADNÍ ZOBRAZOVACÍ METODY Prostorové útvary zobrazujeme do roviny pomocí promítání, což je jisté zobrazení trojrozměrného prostoru (uvažujme rozšířený Eukleidovský prostor) do roviny, které je zadáno
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Další servery s elektronickým obsahem
 Právní upozornění Všechna práva vyhrazena. Žádná část této tištěné či elektronické knihy nesmí být reprodukována a šířena v papírové, elektronické či jiné podobě bez předchozího písemného souhlasu nakladatele.
Právní upozornění Všechna práva vyhrazena. Žádná část této tištěné či elektronické knihy nesmí být reprodukována a šířena v papírové, elektronické či jiné podobě bez předchozího písemného souhlasu nakladatele.
KONSTRUKTIVNÍ GEOMETRIE
 KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
5) Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ
 Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ") 5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie. Pomocný učební text. František Ježek, Světlana Tomiczková
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie Pomocný učební text František Ježek, Světlana Tomiczková Plzeň 20. září 2004 verze 2.0 Předmluva Tento pomocný text
Deskriptivní geometrie 1
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 1 Pomocný učební text 1. část Světlana Tomiczková Plzeň 22. září 2009 verze 3.0 Předmluva Tento pomocný
Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost
 stejnou vzdálenost") Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
RELIÉF. Reliéf bodu. Pro bod ležící na s splynou přímky H A 2 a SA a reliéf není tímto určen.
 RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]
![[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]](/thumbs/51/27343209.jpg "[obr. 1] Rozbor S 3 S 2 S 1. o 1. o 2 [obr. 2]") Příklad Do dané kruhové výseče s ostrým středovým úhlem vepište kružnici (obr. ). M k l V N [obr. ] Rozbor Oblouk l a hledaná kružnice k se dotýkají v bodě T, mají proto v tomto bodě společnou tečnu t.
Příklad Do dané kruhové výseče s ostrým středovým úhlem vepište kružnici (obr. ). M k l V N [obr. ] Rozbor Oblouk l a hledaná kružnice k se dotýkají v bodě T, mají proto v tomto bodě společnou tečnu t.
Definice : Jsou li povrchové pímky kolmé k rovin, vzniká kolmá kruhová válcová plocha a pomocí roviny také kolmý kruhový válec.
 3. EZY NA VÁLCÍCH 3.1. VÁLCOVÁ PLOCHA, VÁLEC Definice : Je dána kružnice k ležící v rovin a pímka a rznobžná s rovinou. Všechny pímky rovnobžné s pímkou a protínající kružnici k tvoí kruhovou válcovou
3. EZY NA VÁLCÍCH 3.1. VÁLCOVÁ PLOCHA, VÁLEC Definice : Je dána kružnice k ležící v rovin a pímka a rznobžná s rovinou. Všechny pímky rovnobžné s pímkou a protínající kružnici k tvoí kruhovou válcovou
Mongeova projekce - úlohy polohy
 Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
3.MONGEOVO PROMÍTÁNÍ. Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru
 3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
SBÍRKA ÚLOH STEREOMETRIE. Polohové vlastnosti útvarů v prostoru
 SÍR ÚO STROTRI Polohové vlastnosti útvarů v prostoru Sbírka úloh STROTRI Polohové vlastnosti útvarů v prostoru gr. arie hodorová, Ph.. rafická úprava a sazba: arcel Vrbas OS SZN POUŽÍVNÝ SYOŮ 5. ZÁY STROTRI
SÍR ÚO STROTRI Polohové vlastnosti útvarů v prostoru Sbírka úloh STROTRI Polohové vlastnosti útvarů v prostoru gr. arie hodorová, Ph.. rafická úprava a sazba: arcel Vrbas OS SZN POUŽÍVNÝ SYOŮ 5. ZÁY STROTRI
1. MONGEOVO PROMÍTÁNÍ
 Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
Perspektiva. Doplňkový text k úvodnímu cvičení z perspektivy. Obsahuje: zobrazení kružnice v základní rovině metodou osmi tečen
 Perspektiva Doplňkový text k úvodnímu cvičení z perspektivy Obsahuje: úvodní pojmy určení skutečné velikosti úsečky zadané v různých polohách zobrazení kružnice v základní rovině metodou osmi tečen 1 Příklad
Perspektiva Doplňkový text k úvodnímu cvičení z perspektivy Obsahuje: úvodní pojmy určení skutečné velikosti úsečky zadané v různých polohách zobrazení kružnice v základní rovině metodou osmi tečen 1 Příklad
2. EZY NA JEHLANECH. Píklad 47 : Sestrojte ez pravidelného tybokého jehlanu ABCDV rovinou.
 2. EZY NA JEHLANECH Píklad 47 : Sestrojte ez pravidelného tybokého jehlanu ABCDV rovinou. Popis konstrukce : Podobn jako u píkladu 41 je výhodné proložit nkterými dvma hranami jehlanu rovinu kolmou k pdorysn.
2. EZY NA JEHLANECH Píklad 47 : Sestrojte ez pravidelného tybokého jehlanu ABCDV rovinou. Popis konstrukce : Podobn jako u píkladu 41 je výhodné proložit nkterými dvma hranami jehlanu rovinu kolmou k pdorysn.
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
OBECNÉ ROTAČNÍ PLOCHY
 OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
OBECNÉ ROTAČNÍ PLOCHY 1. Základní konstrukce na rotačních plochách, tečné roviny a řezy rotačních ploch. Rotační plochy vznikají rotačním pohybem kolem osy. Máme-li v prostoru dánu přímku o a orientovaný
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
KÓTOVANÉ PROMÍTÁNÍ KÓTOVANÉ PROMÍTÁNÍ
 KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
Konstruktivní geometrie - LI. Konstruktivní geometrie - LI () Kótované promítání 1 / 44
 Kótované promítání 1 / 44") Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
Masarykova univerzita v Brnì Pøírodovìdecká fakulta Katedra Matematiky. PRÙNIKY TÌLES V KOLMÉ AXONOMETRII (sbírka pøíkladù) Bakaláøská práce
 Bakaláøská práce") Masarykova univerzita v Brnì Pøírodovìdecká fakulta Katedra Matematiky PRÙNIKY TÌLES V KOLMÉ AXONOMETRII (sbírka pøíkladù) Bakaláøská práce Martin Brauner Brno 2006 Vedoucí bakaláøské práce: doc. RNDr.
Masarykova univerzita v Brnì Pøírodovìdecká fakulta Katedra Matematiky PRÙNIKY TÌLES V KOLMÉ AXONOMETRII (sbírka pøíkladù) Bakaláøská práce Martin Brauner Brno 2006 Vedoucí bakaláøské práce: doc. RNDr.
Klíčová slova Mongeovo promítání, kuželosečka, rotační plocha.
 Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Mongeovo zobrazení. Osová afinita
 Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 1. Pomocný učební text
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 11. září 2006 verze 4.0 Předmluva
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 1 Pomocný učební text František Ježek, Marta Míková, Světlana Tomiczková Plzeň 11. září 2006 verze 4.0 Předmluva
ANALYTICKÁ GEOMETRIE INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
 ANALYTICKÁ GEOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu
ANALYTICKÁ GEOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu
Kreslení, rýsování. Zobrazení A B. Promítání E 3 E 2
 Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Mongeovo zobrazení. Řez jehlanu
 Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
1.1 Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem
 Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
ANALYTICKÁ GEOMETRIE INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky
 ANALYTICKÁ GEOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu
ANALYTICKÁ GEOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu
A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).
![A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).](/thumbs/101/151863289.jpg "A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).") Úkoly k zápočtu z BA008 Všechny úkoly jsou povinné. Úkoly číslo 4, 7, 12, 14 budou uznány automaticky, pokud poslední den semestru, tj. 3. 5. 2019, budou všechny ostatní úkoly odevzdané a uznané. 1. Je
Úkoly k zápočtu z BA008 Všechny úkoly jsou povinné. Úkoly číslo 4, 7, 12, 14 budou uznány automaticky, pokud poslední den semestru, tj. 3. 5. 2019, budou všechny ostatní úkoly odevzdané a uznané. 1. Je
Zářezová metoda Kosoúhlé promítání
 Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
STEREOMETRIE INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky
 STEREOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia utoři projektu Student na prahu 21. století - využití IT ve vyučování matematiky na gymnáziu INVESTIE
STEREOMETRIE Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia utoři projektu Student na prahu 21. století - využití IT ve vyučování matematiky na gymnáziu INVESTIE
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Kartografické projekce
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Kartografické projekce Vypracoval: Jiří Novotný Třída: 4.C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Kartografické projekce Vypracoval: Jiří Novotný Třída: 4.C Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
tečen a osu o π, V o; plochu omezte hranou vratu a půdorysnou a proved te rozvinutí
 Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191. Obor 23-41-M/01 STROJÍRENSTVÍ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
středu promítání (oka) se objekty promítají do roviny (nahrazuje sítnici). Perspektivní obrazy
 se objekty promítají do roviny (nahrazuje sítnici). Perspektivní obrazy") Lineární perspektiva Lineární perspektiva je významnou aplikací středového promítání. V technické praxi se používá především k zobrazování objektů větších rozměrů, napodobuje tak lidské vidění. Ze středu
Lineární perspektiva Lineární perspektiva je významnou aplikací středového promítání. V technické praxi se používá především k zobrazování objektů větších rozměrů, napodobuje tak lidské vidění. Ze středu
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Základní pojmy: Objemy a povrchy těles Vzájemná poloha bodů, přímek a rovin Opakování: Obsahy a obvody rovinných útvarů
 1/13 Základní pojmy: Objemy a povrchy těles Vzájemná poloha bodů, přímek a rovin Opakování: Obsahy a obvody rovinných útvarů STEREOMETRIE Stereometrie - geometrie v prostoru - zabývá se vzájemnou polohou
1/13 Základní pojmy: Objemy a povrchy těles Vzájemná poloha bodů, přímek a rovin Opakování: Obsahy a obvody rovinných útvarů STEREOMETRIE Stereometrie - geometrie v prostoru - zabývá se vzájemnou polohou
Fotogrammetrie. zpracovala Petra Brůžková. Fakulta Architektury ČVUT v Praze 2012
 Fotogrammetrie zpracovala Petra Brůžková Fakulta Architektury ČVUT v Praze 2012 Fotogrammetrie je geometrický postup, který nám umožňuje určení tvaru, velikosti a polohy reálných objektů na základě fotografického
Fotogrammetrie zpracovala Petra Brůžková Fakulta Architektury ČVUT v Praze 2012 Fotogrammetrie je geometrický postup, který nám umožňuje určení tvaru, velikosti a polohy reálných objektů na základě fotografického
Test č. 1. Kuželosečky, afinita a kolineace
 Test č. 1 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2006-2007 Kuželosečky, afinita a kolineace (1) (a) Je dána elipsa E(F 1, F 2, a), F 1 F 2 < 2a. Sestrojte několik bodů
Test č. 1 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2006-2007 Kuželosečky, afinita a kolineace (1) (a) Je dána elipsa E(F 1, F 2, a), F 1 F 2 < 2a. Sestrojte několik bodů
prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného
: elipsa je průsečnou křivkou rovinného") Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Elipsa Výklad efinice a ohniskové vlastnosti prostorová definice (viz obrázek vlevo nahoře): elipsa je průsečnou křivkou rovinného řezu na rotační kuželové ploše, jestliže řezná rovina není kolmá k ose
Projekt ŠABLONY NA GVM Gymnázium Velké Meziříčí registrační číslo projektu: CZ.1.07/1.5.00/
 Projekt ŠABLONY NA GVM Gymnázium Velké Meziříčí registrační číslo projektu: CZ.1.07/1.5.00/34.0948 IV-2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol STEREOMETRIE
Projekt ŠABLONY NA GVM Gymnázium Velké Meziříčí registrační číslo projektu: CZ.1.07/1.5.00/34.0948 IV-2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol STEREOMETRIE
Obrázek 34: Vznik středové kolineace
 6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
STEREOMETRIE. Tělesa. Značení: body A, B, C,... přímky p, q, r,... roviny ρ, σ, τ,...
 STEREOMETRIE Stereometrie je část geometrie, která se zabývá studiem prostorových útvarů. Základními prostorovými útvary, se kterými budeme pracovat, jsou bod, přímka a rovina. Značení: body A, B, C,...
STEREOMETRIE Stereometrie je část geometrie, která se zabývá studiem prostorových útvarů. Základními prostorovými útvary, se kterými budeme pracovat, jsou bod, přímka a rovina. Značení: body A, B, C,...
4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL
 4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL Definice : Je dána kružnice k ležící v rovin a mimo ni bod V. Všechny pímky jdoucí bodem V a protínající kružnici k tvoí kruhovou kuželovou plochu. Tyto pímky
4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL Definice : Je dána kružnice k ležící v rovin a mimo ni bod V. Všechny pímky jdoucí bodem V a protínající kružnici k tvoí kruhovou kuželovou plochu. Tyto pímky
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
9 Axonometrie ÚM FSI VUT v Brně Studijní text. 9 Axonometrie
 9 Axonometrie Mongeov projekce má řdu předností: jednoduchost, sndná měřitelnost délek úhlů. Je všk poměrně nenázorná. Podsttnou část technických výkresů proto tvoří kromě půdorysu, nárysu event. bokorysu
9 Axonometrie Mongeov projekce má řdu předností: jednoduchost, sndná měřitelnost délek úhlů. Je všk poměrně nenázorná. Podsttnou část technických výkresů proto tvoří kromě půdorysu, nárysu event. bokorysu
MATEMATIKA. Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci
 MATEMATIKA Úloha o čtverci a přímkách ŠÁRKA GERGELITSOVÁ TOMÁŠ HOLAN Matematicko-fyzikální fakulta UK, Praha Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci (například podobnosti)
MATEMATIKA Úloha o čtverci a přímkách ŠÁRKA GERGELITSOVÁ TOMÁŠ HOLAN Matematicko-fyzikální fakulta UK, Praha Problémy a úlohy, v nichž podrobujeme geometrický objekt nějaké transformaci (například podobnosti)
1.1 Základní pojmy prostorové geometrie. Předmětem studia prostorové geometrie je prostor, jehož prvky jsou body. Další
 Kapitola 1 Planimetrie a stereometrie Doplňky ke středoškolské látce 1.1 Základní pojmy prostorové geometrie 1.1.1 Axiomy Předmětem studia prostorové geometrie je prostor, jehož prvky jsou body. Další
Kapitola 1 Planimetrie a stereometrie Doplňky ke středoškolské látce 1.1 Základní pojmy prostorové geometrie 1.1.1 Axiomy Předmětem studia prostorové geometrie je prostor, jehož prvky jsou body. Další