Smysl otáčení. Aplikace. Pravotočivá
|
|
|
- Matyáš Bílek
- před 9 lety
- Počet zobrazení:
Transkript


1 Šroubovice Definice Šroubovice je křivka generovaná bodem A, který se otáčí kolem dané přímky o a zároveň se posouvá podél této přímky, oboje rovnoměrnou rychlostí. Pohyb bodu A šroubový pohyb Přímka o osa šroubového pohybu Válcová šroubovice vytvářející bod A je v konstantní vzdálenosti od osy o. Kuželová šroubovice vzdálenost bodu A se lineárně mění. 1


 lékařství -")
2 Pravotočivá Smysl otáčení Levotočivá Aplikace architektura a stavitelství - schodiště elektrotechnika zesilovače, kabely, topné spirály biologie zvířecí rohy, stonky popínavých rostlin, honící se veverky Pravotočivá šroubovice: strojírenství - standardní šrouby, matice, vruty (kde se otáčivý pohyb mění na posuvný nebo obráceně) lékařství - molekula DNA 2
 lékařství -")
3 Guggenheim Museum, New York Kuželová šroubovice Divadlo Spirála, Praha Sférická šroubovice 3

4 Válcová šroubovice Závit část šroubovice vzniklá při otočení o úhel 2p Výška závitu v velikost posunutí při otočení o úhel 2p Redukovaná výška závitu v o velikost posunutí při otočení o úhel 1 rad Určení šroubovice Jednoznačné zadání šroubovice: osa o, typ pohybu, bod A, v nebo v o 4

5 Závislost rovnoměrných pohybů Posunutí Rozvinutí lineární závislost délky posunutí na úhlu otočení Nárys sinusoida Otáčení Půdorys kružnice Vztah mezi v a v o : v=2πv o Rozvinutím šroubovice je úsečka, proto je délka jednoho závitu šroubovice l s v 2 2p r 2 Konstrukce v Mongeově promítání Př.ČE-KO: PŘ s.118: Sestrojte jeden závit pravotočivé šroubovice (alespoň devět bodů), která je dána osou o, o 1 = [0, 6, 0], bodem A = [4, 6, 0] a v=8. 1. Půdorys = k(o 1, r) 2. Výpočet: 9 bodů => 8 kroků závit=> pro 360 je dáno v=8cm 360 /8 odpovídá 8cm/8 5
, která je dána osou o, o 1 = [0, 6, 0], bodem A = [4, 6, 0] a v=8.")
6 Tečna šroubovice Šroubovice je křivka konstantního spádu (tečny svírají s osou konstantní úhel). Vlastnosti Jestliže posuneme všechny tečny šroubovice do jednoho bodu vytvoří rotační kuželovou plochu zvanou řídící kuželová plocha šroubovice. Řídící kužel: Vrchol V o Výška kužele = v 0 Podstava = s 1 V s 1 Věta: Ke každé tečně t šroubovice existuje přímka kuželové ploše taková, že: je rovnoběžná s t prochází bodem V, V o, OV = v 0. t t t na řídící 6


7 Konstrukce V 2 V 1 Pravotočivá Př.ČE-KO: PŘ s.118: V bodě T, z T = 7, sestrojte tečnu šroubovice. Postup: 1. v 0, V, 2. t 1, t 1 3. směr t 2, 4. t 2. t 2 Řídicí kužel: v 0,V o s 1 Bodová funkce X(t) = [x(t); y(t); z(t)], t I Půdorys (v rovině p(x,y)): Kružnice se středem o 1 a poloměrem r x(t) = r cos(t) + o X, y(t) = r sin(t) + o Y, t <0,2π>, o 1 = [o X,o Y,0]. Nárys: lineární závislost délky posunutí na úhlu otočení lineární funkce délka posunutí o 1 rad = v 0 délka posunutí o t rad = v 0 t z(t) = v 0 t + startovní výška 7
 = [x(t); y(t); z(t)], t I Půdorys (v rovině p(x,y)): Kružnice se středem o 1 a")
8 Př.ČE-KO: PŘ s.118: Napište bodovou funkci jednoho závitu zadané šroubovice a určete bodovou funkci tečny této šroubovice v bodě Q. o 1 = [o X, o Y, 0] = [0, 6, 0] a r = A, o = 4; Q = X(π/2) x(t) = 4cos(t), y(t) = 4sin(t) + 6, t <0,2π>, v = 2πv 0, z(t) = 4t/π, z A =0 startovní výška =0 X(t) = [4cos(t), 4sin(t) + 6, 4t/π],t t = 0 [4, 6, 0] = A t = π/2 [0, 10, 2] Tečna Y(s) šroubovice dané X(t) = [x(t); y(t); z(t)] v bodě Q=X(t 0 ): Y ( s) Q st, s R X ( t ) t 0 <0,2π>. 8
![o 1 = [o X, o Y, 0] = [0, 6, 0] a r = A, o = 4; Q = X(π/2) x(t) = 4cos(t), y(t) = 4sin(t) + 6, t <0,2π>, v = 2πv 0,](/docs-images/41/10136563/images/page_8.jpg "z(t) = 4t/π, z A =0 startovní výška =0 X(t) = [4cos(t), 4sin(t) + 6, 4t/π],t t = 0 [4, 6, 0] = A t = π/2 [0, 10, 2]")
9 Bodová funkce - shrnutí X t) [ r cos t ox, r sin t o t 0,2p ( y 0 X t) [ r sin t ox, r cost o t 0,2p ( y 0, v t c],, v t c], Obecně jeden závit: t <0,2p>. r poloměr o 1 = [o X,o Y,0]..umístění osy c...výška zadaného tvořícího bodu Př. Určete bodovou funkci poloviny závitu levotočivé šroubovice, která je dána osou o, o 1 = [-3, 5, 0], bodem A = [-3, 2, 2] a v=20. Př. Sestrojte šroubovici (alespoň 7 bodů) danou bodovou funkcí 9 X ( t) [5 5cost,6 5sin t,1 t], t 0, p. p Konstrukce ze zadané bodové funkce X ( t) [ r cos t ox, r sin t oy, v0t c], t 0,2p 1. osa o kolmá k půdorysně, o [ o x, o,0] 1 y 2. poloměr válcové plochy r 3. bod A šroubovice (parametr c) A X (0) 4. bod B šroubovice (orientace) p B X 2 5. výška závitu v v 2p v 0 6. zobrazení šroubovice 1 závit 9
![p Konstrukce ze zadané bodové funkce X ( t) [ r cos t ox, r sin t oy, v0t c], t 0,2p 1. osa o kolmá k půdorysně, o [ o x, o,0] 1 y 2. poloměr válcové plochy r 3.](/docs-images/41/10136563/images/page_9.jpg "bod A šroubovice (parametr c) A X (0) 4. bod B šroubovice (orientace) p B X 2 5. výška závitu v v 2p v 0 6. zobrazení šroubovice 1 závit 9")
.")

10 Šroubové plochy Definice Šroubová plocha vzniká šroubovým pohybem křivky (nebo plochy). SHOW Každým bodem šroubové plochy prochází => jedna šroubovice a jedna poloha šroubované tvořící křivky. 10



11 Určení plochy 1. Šroubový pohyb (osa, směr, v nebo v 0 ) 2. Tvořící křivka k Přímkové šroubové plochy přehled v Monge Přímé (pravoúhlé) Šikmé (kosé) 11

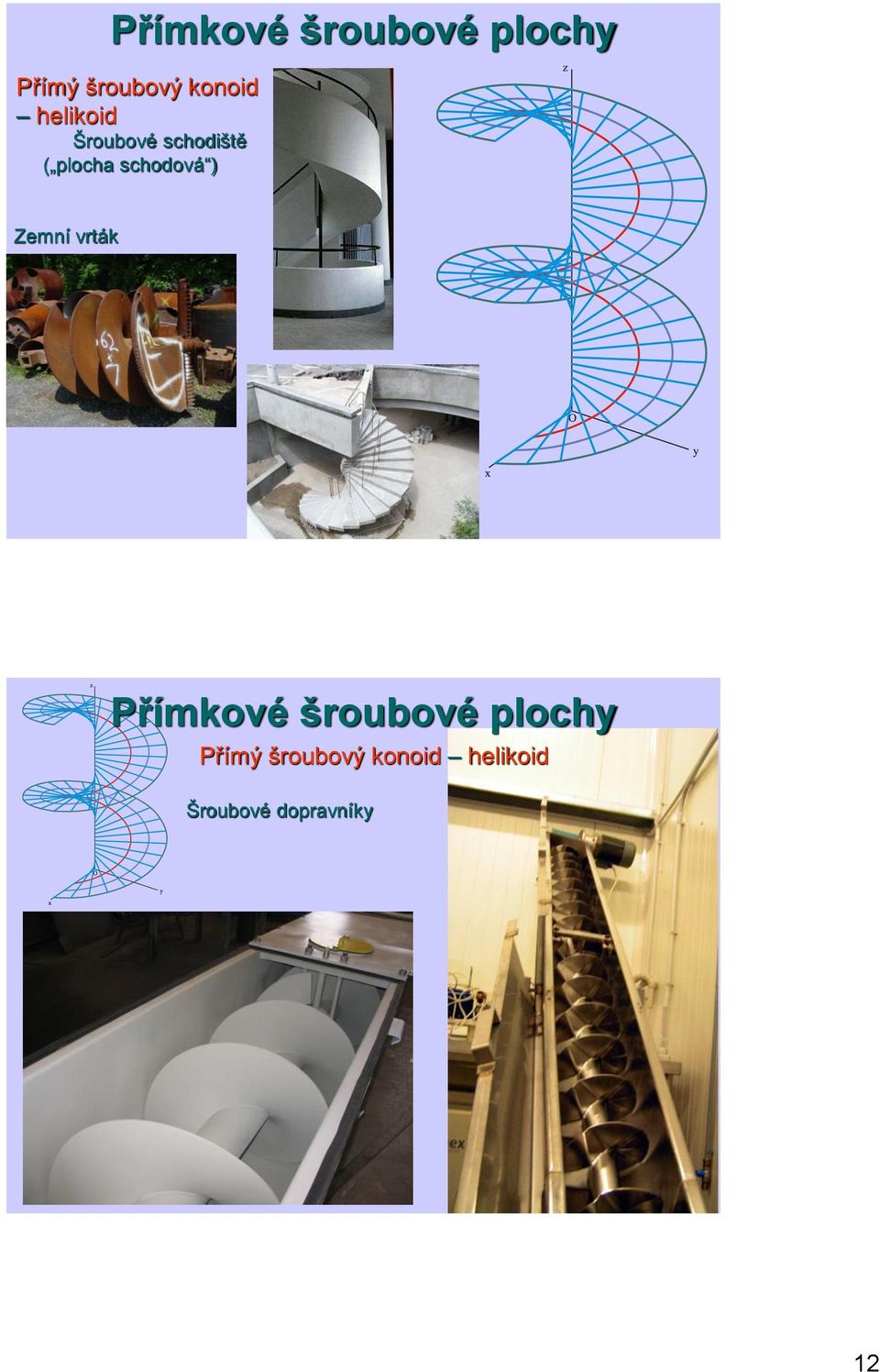
 Zemní vrták Přímkové šroubové plochy Přímý šroubový konoid helikoid Šroubové dopravníky 12")
12 Přímkové šroubové plochy Přímý šroubový konoid helikoid Šroubové schodiště ( plocha schodová ) Zemní vrták Přímkové šroubové plochy Přímý šroubový konoid helikoid Šroubové dopravníky 12
13 Přímkové šroubové plochy Přímá šroubová plocha otevřená Turning Torso Malmö, Švédsko Santiago Calatrava ( ) Přímkové šroubové plochy Přímá šroubová plocha otevřená svidřík Plocha vzniklá šroubovým pohybem čtverce (obsahuje 4 plochy tohoto typu). 13


14 Přímkové šroubové plochy Šikmá šroubová plocha uzavřená- Vývrtková plocha Nebozez, vrták, Withwordův závit. Přímkové šroubové plochy Šikmá šroubová plocha otevřená Schodiště, zastřešení schodišť. Dostavba Louvre - Paříž Ieoh Ming Pei 14


15 Přímkové šroubové plochy Plocha tečen šroubovice - Šikmá šroubová plocha otevřená Jediná rozvinutelná šroubová plocha Cyklické šroubové plochy Plocha sv. Jiljí Meridián = kružnice. Skluzavky, klenby, zastřešení schodiště, vrtáky, Withwordův závit. 15


16 Cyklické šroubové plochy Vinutý sloupek Příčný profil = kružnice Zdobení, skluzavky. Cyklické šroubové plochy Archimédova serpentina Kružnice v normálové rovině 16

17 Kanálové plochy Archimédova Serpentina Pružiny, kuličková ložiska Skluzavky 17

ŠROUBOVICE. 1) Šroubový pohyb. 2) Základní pojmy a konstrukce
 Šroubový pohyb. 2) Základní pojmy a konstrukce") 1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
Šroubový pohyb rovnoměrný pohyb složený z posunutí a rotace. Šroubovice dráha hmotného bodu při šroubovém pohybu
 ŠROUBOVICE Šroubový pohyb rovnoměrný pohyb složený z posunutí a rotace Šroubovice dráha hmotného bodu při šroubovém pohybu ZÁKLADNÍ POJMY osa šroubovice o nosná válcová plocha (r poloměr řídicí kružnice
ŠROUBOVICE Šroubový pohyb rovnoměrný pohyb složený z posunutí a rotace Šroubovice dráha hmotného bodu při šroubovém pohybu ZÁKLADNÍ POJMY osa šroubovice o nosná válcová plocha (r poloměr řídicí kružnice
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura:
 8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
Šroubové plochy. Mgr. Jan Šafařík. Konzultace č. 3. přednášková skupina P-BK1VS1 učebna Z240
 Šroubové plochy Mgr. Jan Šafařík Konzultace č. 3 přednášková skupina P-BK1VS1 učebna Z240 Šroubový pohyb Šroubový pohyb vzniká složením z rovnoměrného otáčení (rotace) kolem dané osy o a rovnoměrného posunutí
Šroubové plochy Mgr. Jan Šafařík Konzultace č. 3 přednášková skupina P-BK1VS1 učebna Z240 Šroubový pohyb Šroubový pohyb vzniká složením z rovnoměrného otáčení (rotace) kolem dané osy o a rovnoměrného posunutí
Šroubovice... 5 Šroubové plochy Stanovte paprsek tak, aby procházel bodem A a po odrazu na rovině ρ procházel bodem
 Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
Geometrie Mongeovo promítání................................ 1 Řezy těles a jejich průniky s přímkou v pravoúhlé axonometrii......... 3 Kuželosečky..................................... 4 Šroubovice......................................
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI
 KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
KRUHOVÁ ŠROUBOVICE A JEJÍ VLASTNOSTI Šroubový pohyb vzniká složením otáčení kolem osy o a posunutí ve směru osy o, přičemž oba pohyby jsou spojité a rovnoměrné. Jestliže při pohybu po ose "dolů" je otáčení
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].
![Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].](/thumbs/52/30469232.jpg "Konstruktivní geometrie Bod Axonometrie. Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11].") Konstruktivní geometrie Bod Axonometrie Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11]. VŠB-TU Ostrava 1 Jana Bělohlávková Konstruktivní geometrie
Konstruktivní geometrie Bod Axonometrie Úloha: V pravoúhlé axonometrii (XY = 10; XZ = 12; YZ = 11) zobrazte bod A[2; 3; 5] a bod V[9; 7.5; 11]. VŠB-TU Ostrava 1 Jana Bělohlávková Konstruktivní geometrie
Šroubovice a šroubové plochy
 Šroubovice a šroubové plochy Mgr. Jan Šafařík Konzultace č. 2 přednášková skupina P-BK1VS1 učebna Z240 Literatura Základní literatura: Autorský kolektiv Ústavu matematiky a deskriptivní geometrie FaSt
Šroubovice a šroubové plochy Mgr. Jan Šafařík Konzultace č. 2 přednášková skupina P-BK1VS1 učebna Z240 Literatura Základní literatura: Autorský kolektiv Ústavu matematiky a deskriptivní geometrie FaSt
s touto válcovou plochou. Tento případ nebudeme dále uvažovat.
 Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Šroubové plochy Šroubová plocha Φ(k) vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý, resp. pravotočivý je i plocha Φ levotočivá, resp. pravotočivá.
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny společného
PŘÍMKOVÉ PLOCHY. Přednáška DG2*A
 PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
PŘÍMKOVÉ PLOCHY Přednáška DG*A PŘÍMKOVÉ PLOCHY = plocha, jejímž každým bodem prochází alespoň jedna přímka plochy. Každá přímková plocha je určena třemi řídícími křivkami, příp. plochami. p k k k 3 Je-li
11. Rotační a šroubové plochy
 Rotační a šroubové plochy ÚM FSI VU v Brně Studijní text. Rotační a šroubové plochy. Rotační plochy Rotační plochy jsou plochy, které lze získat rotačním šablonováním křivky. Jejich rovnice je tedy tvaru
Rotační a šroubové plochy ÚM FSI VU v Brně Studijní text. Rotační a šroubové plochy. Rotační plochy Rotační plochy jsou plochy, které lze získat rotačním šablonováním křivky. Jejich rovnice je tedy tvaru
Konstruktivní geometrie
 Konstruktivní geometrie Elipsa Úloha 1: Najděte bod M takový, aby součet jeho vzdáleností od bodů F 1 a F 2 byl 12cm; tj. F 1 M+F 2 M=12. Najděte více takových bodů. Konstruktivní geometrie Elipsa Oskulační
Konstruktivní geometrie Elipsa Úloha 1: Najděte bod M takový, aby součet jeho vzdáleností od bodů F 1 a F 2 byl 12cm; tj. F 1 M+F 2 M=12. Najděte více takových bodů. Konstruktivní geometrie Elipsa Oskulační
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
MONGEOVO PROMÍTÁNÍ - 2. část
 MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ. bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po dlouhou dobu bylo vojenským tajemstvím
 po dlouhou dobu bylo vojenským tajemstvím") část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
tečen a osu o π, V o; plochu omezte hranou vratu a půdorysnou a proved te rozvinutí
 Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
Řešené úlohy Rozvinutelná šroubová plocha v Mongeově promítání Příklad: V Mongeově promítání zobrazte půl závitu rozvinutelné šroubové plochy, jejíž hranou vratu je pravotočivá šroubovice, která prochází
ŠROUBOVÉ PLOCHY. 1. Základní úlohy na šroubových plochách.
 ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
ŠROUBOVÉ PLOCHY 1. Základní úlohy na šroubových plochách. Šroubová plocha Φ vzniká šroubovým pohybem křivky k, která není trajektorií daného šroubového pohybu. Je-li pohyb levotočivý (pravotočivý je i
Analytická geometrie přímky, roviny (opakování středoškolské látky) = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,
 = 0. Napište obecnou rovnici. 8. Jsou dány body A [ 2,3,") Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
Analytická geometrie přímky roviny opakování středoškolské látk Jsou dány body A [ ] B [ 5] a C [ 6] a) přímky AB b) osy úsečky AB c) přímky na které leží výška vc trojúhelníka ABC d) přímky na které leží
půdorysu; pro každý bod X v prostoru je tedy sestrojen pouze jeho nárys X 2 a pro jeho
 Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
Řešené úlohy Rotační paraboloid v kolmém promítání na nárysnu Příklad: V kolmém promítání na nárysnu sestrojte tečnou rovinu τ v bodě A rotačního paraboloidu, který má ohnisko F a svislou osu o, F o, rotace;
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Přímkové šroubové plochy
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Přímkové šroubové plochy Vypracoval: Pavel Kačírek Třída: 8.M Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Přímkové šroubové plochy Vypracoval: Pavel Kačírek Třída: 8.M Školní rok: 2011/2012 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Další plochy technické praxe
 Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Další plochy technické praxe Dosud studované plochy mají široké využití jak ve stavební tak ve strojnické praxi. Studovali jsme možnosti jejich konstrukcí, vlastností i využití v praxi. Kromě těchto ploch
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).
![A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).](/thumbs/101/151863289.jpg "A[ 20, 70, 50] a výška v = 70, volte z V > z S ; R[ 40, 20, 80], Q[60, 70, 10]. α(90, 60, 70).") Úkoly k zápočtu z BA008 Všechny úkoly jsou povinné. Úkoly číslo 4, 7, 12, 14 budou uznány automaticky, pokud poslední den semestru, tj. 3. 5. 2019, budou všechny ostatní úkoly odevzdané a uznané. 1. Je
Úkoly k zápočtu z BA008 Všechny úkoly jsou povinné. Úkoly číslo 4, 7, 12, 14 budou uznány automaticky, pokud poslední den semestru, tj. 3. 5. 2019, budou všechny ostatní úkoly odevzdané a uznané. 1. Je
Klíčová slova Mongeovo promítání, kuželosečka, rotační plocha.
 Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Abstrakt Tento text je určen všem zájemcům z řad široké veřejnosti, především jako studijní materiál pro studenty Konstruktivní a počítačové geometrie. Práce pojednává o rotačních kvadratických plochách,
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Interaktivní modely pro Konstruktivní geometrii
 Interaktivní modely pro Konstruktivní geometrii Jakub Makarovský Abstrakt V příspěvku jsou prezentovány interaktivní modely základních úloh z Konstruktivní geometrie (1. ročník, zimní semestr) zaměřující
Interaktivní modely pro Konstruktivní geometrii Jakub Makarovský Abstrakt V příspěvku jsou prezentovány interaktivní modely základních úloh z Konstruktivní geometrie (1. ročník, zimní semestr) zaměřující
Klasické třídy ploch
 Klasické třídy ploch Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Klasické třídy ploch klasické plochy jsou často generovány kinematicky, a to pohybem tvořicí křivky takto např. vznikají
Klasické třídy ploch Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Klasické třídy ploch klasické plochy jsou často generovány kinematicky, a to pohybem tvořicí křivky takto např. vznikají
Konstruktivní geometrie
 Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
Mgr. Miroslava Tihlaříková, Ph.D. Konstruktivní geometrie & technické kreslení Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na disciplíny
5) Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ
 Průnik rotačních ploch. A) Osy totožné (a kolmé k půdorysně) Bod R průniku ploch. 1) Pomocná plocha κ") 5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
5) Průnik rotačních ploch Bod R průniku ploch κ, κ : 1) Pomocná plocha κ ) Průniky : l κ κ, l κ κ 3) R l l Volba pomocné plochy pro průnik rotačních ploch závisí na poloze os ploch. Omezíme se pouze na
Pracovní listy MONGEOVO PROMÍTÁNÍ
 Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
Technická univerzita v Liberci Fakulta přírodovědně-humanitní a pedagogická Katedra matematiky a didaktiky matematiky MONGEOVO PROMÍTÁNÍ Petra Pirklová Liberec, únor 07 . Zobrazte tyto body a určete jejich
AXONOMETRIE - 2. část
 AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
AXONOMETRIE - 2. část Průmět přímky K určení přímky stačí její dva libovolné průměty, zpravidla používáme axonometrický průmět a půdorys. Bod ležící na přímce se zobrazí do bodu na přímce v každém průmětu.
Definice Tečna paraboly je přímka, která má s parabolou jediný společný bod,
 5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
Deskriptivní geometrie 0A5
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Deskriptivní geometrie 0A5 Cvičení, zimní semestr DOMÁCÍ ÚLOHY Jan Šafařík Veronika Roušarová Brno c 2003 Obsah
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Deskriptivní geometrie 0A5 Cvičení, zimní semestr DOMÁCÍ ÚLOHY Jan Šafařík Veronika Roušarová Brno c 2003 Obsah
Geometrie. 1 Metrické vlastnosti. Odchylku boční hrany a podstavy. Odchylku boční stěny a podstavy
 1 Metrické vlastnosti 9000153601 (level 1): Úhel vyznačený na obrázku znázorňuje: eometrie Odchylku boční hrany a podstavy Odchylku boční stěny a podstavy Odchylku dvou protilehlých hran Odchylku podstavné
1 Metrické vlastnosti 9000153601 (level 1): Úhel vyznačený na obrázku znázorňuje: eometrie Odchylku boční hrany a podstavy Odchylku boční stěny a podstavy Odchylku dvou protilehlých hran Odchylku podstavné
Kinematická geometrie
 Gymnázium Christiana Dopplera Kinematická geometrie Autor: Vojtěch Šimeček Třída: 4.C Školní rok: 2011/2012 Zadavatel: Mgr. Ondřej Machů Ročníkovou práci jsem zhotovil samostatně, pouze s pomocí zdrojů
Gymnázium Christiana Dopplera Kinematická geometrie Autor: Vojtěch Šimeček Třída: 4.C Školní rok: 2011/2012 Zadavatel: Mgr. Ondřej Machů Ročníkovou práci jsem zhotovil samostatně, pouze s pomocí zdrojů
DESKRIPTIVNÍ GEOMETRIE ELEKTRONICKÁ SKRIPTA CYKLICKÉ KŘIVKY
 DESKRIPTIVNÍ GEOMETRIE ELEKTRONICKÁ SKRIPTA CYKLICKÉ KŘIVKY Cyklické křivky patří především mezi technické křivky. Mají bohatou historii. První zmínku nacházíme dokonce už u Ptolemáia, konkrétnější studie
DESKRIPTIVNÍ GEOMETRIE ELEKTRONICKÁ SKRIPTA CYKLICKÉ KŘIVKY Cyklické křivky patří především mezi technické křivky. Mají bohatou historii. První zmínku nacházíme dokonce už u Ptolemáia, konkrétnější studie
Konstruktivní geometrie PODKLADY PRO PŘEDNÁŠKU
 Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Konstruktivní geometrie & technické kreslení PODKLADY PRO PŘEDNÁŠKU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného
Deskriptivní geometrie pro střední školy
 Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
Deskriptivní geometrie pro střední školy Mongeovo promítání 1. díl Ivona Spurná Nakladatelství a vydavatelství R www.computermedia.cz Obsah TEMATICKÉ ROZDĚLENÍ DÍLŮ KNIHY DESKRIPTIVNÍ GEOMETRIE 1. díl
ŘEŠENÉ PŘÍKLADY DESKRIPTIVNÍ GEOMETRIE. ONDŘEJ MACHŮ a kol.
 ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
ŘEŠENÉ PŘÍKLADY Z DESKRIPTIVNÍ GEOMETRIE ONDŘEJ MACHŮ a kol. Předmluva Otevíráte sbírku, která vznikla z příkladů zadaných studentům pátého ročníku PřF UP v Olomouci, učitelů matematiky a deskriptivní
0 x 12. x 12. strana Mongeovo promítání - polohové úlohy.
 strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
strana 9 3.1a Sestrojte sdružené průměty stopníků přímek a = AB, b = CD, c = EF. A [-2, 5, 1], B [3/2, 2, 5], C [3, 7, 4], D [5, 2, 4], E [-5, 3, 3], F [-5, 3, 6]. 3.1b Určete parametrické vyjádření přímek
ŠROUBOVÉ A ZÁVITOVÉ SPOJE
 ŠROUBOVÉ A ZÁVITOVÉ SPOJE Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a
ŠROUBOVÉ A ZÁVITOVÉ SPOJE Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a
Západočeská univerzita v Plzni. Fakulta aplikovaných věd Katedra matematiky. Geometrie pro FST 2. Pomocný učební text - díl II
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 2 Pomocný učební text - díl II František Ježek, Světlana Tomiczková Plzeň 7. února 2006 verze 2.0 Obsah 7 Obalové
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Geometrie pro FST 2 Pomocný učební text - díl II František Ježek, Světlana Tomiczková Plzeň 7. února 2006 verze 2.0 Obsah 7 Obalové
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ CYKLICKÉ ŠROUBOVÉ PLOCHY BAKALÁŘSKÁ PRÁCE FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MATEMATIKY BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MATEMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF MATHEMATICS CYKLICKÉ ŠROUBOVÉ PLOCHY CYCLIC HELICOID
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MATEMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF MATHEMATICS CYKLICKÉ ŠROUBOVÉ PLOCHY CYCLIC HELICOID
Plochy stavebně-inženýrské praxe
 Plochy stavebně-inženýrské praxe 7. Plochy posouvání In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 81 87. Persistent
Plochy stavebně-inženýrské praxe 7. Plochy posouvání In: František Kadeřávek (author): Plochy stavebně-inženýrské praxe. (Czech). Praha: Jednota československých matematiků a fysiků, 1950. pp. 81 87. Persistent
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY
 ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
ZBORCENÉ PŘÍMKOVÉ PLOCHY ŘEŠENÉ PŘÍKLADY Zpracovala: Kristýna Rožánková FA ČVUT 2011 ZBORCENÉ PŘÍMKOVÉ PLOCHY Zborcené přímkové plochy jsou určeny třemi křivkami k, l, m, které neleží na jedné rozvinutelné
MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]
![MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]](/thumbs/55/35543113.jpg "MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]") ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
Zobrazení hranolu. Příklad 5: Sestrojte řez pravidelného šestibokého hranolu s podstavou v půdorysně rovinou ρ. Sestrojte síť seříznuté části.
 Zobrazení hranolu Příklad 1: Zobrazte pravidelný pětiboký hranol s podstavou v půdorysně π. Podstava je dána středem S a vrcholem A. Výška hranolu je v. Určete zbývající průmět bodu M pláště hranolu. 1
Zobrazení hranolu Příklad 1: Zobrazte pravidelný pětiboký hranol s podstavou v půdorysně π. Podstava je dána středem S a vrcholem A. Výška hranolu je v. Určete zbývající průmět bodu M pláště hranolu. 1
1. Přímka a její části
 . Přímka a její části přímka v rovině, v prostoru, přímka jako graf funkce, konstrukce přímky nebo úsečky, analytická geometrie přímky, přímka jako tečna grafu, přímka a kuželosečka Přímka v rovině a v
. Přímka a její části přímka v rovině, v prostoru, přímka jako graf funkce, konstrukce přímky nebo úsečky, analytická geometrie přímky, přímka jako tečna grafu, přímka a kuželosečka Přímka v rovině a v
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl I Světlana Tomiczková Plzeň 12. února 2016 verze 2.0 2 Autoři Obsah 1 Elementární
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl I Světlana Tomiczková Plzeň 12. února 2016 verze 2.0 2 Autoři Obsah 1 Elementární
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. Technické Osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické Osvětlení Vypracoval: Zbyšek Sedláček Třída: 8.M Školní rok: 2013/2014 Seminář: Deskriptivní geometrie Prohlašuji, že jsem
Mongeovo zobrazení. Řez jehlanu
 Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
Mongeovo zobrazení Řez jehlanu Středová kolineace Středová kolineace Definice Geometrická příbuznost mezi útvary dvou rovin (různých nebo totožných) splňující následující podmínky Středová kolineace Definice
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Topografické plochy KG - L MENDELU. KG - L (MENDELU) Topografické plochy 1 / 56
 Topografické plochy 1 / 56") Topografické plochy KG - L MENDELU KG - L (MENDELU) Topografické plochy 1 / 56 Obsah 1 Úvod 2 Křivky a body na topografické ploše 3 Řez topografické plochy rovinou 4 Příčný a podélný profil KG - L (MENDELU)
Topografické plochy KG - L MENDELU KG - L (MENDELU) Topografické plochy 1 / 56 Obsah 1 Úvod 2 Křivky a body na topografické ploše 3 Řez topografické plochy rovinou 4 Příčný a podélný profil KG - L (MENDELU)
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
A 1. x x. 1.1 V pravoúhlé axonometrii zobrazte průměty bodu A [4, 5, 8].
![A 1. x x. 1.1 V pravoúhlé axonometrii zobrazte průměty bodu A [4, 5, 8].](/thumbs/62/46958546.jpg "A 1. x x. 1.1 V pravoúhlé axonometrii zobrazte průměty bodu A [4, 5, 8].") strana 1 1. onometrie. 1.1 V pravoúhlé aonometrii obrate průmět bodu [4, 5, 8]. 1.2 Zobrate bývající pravoúhlé průmět bodu do souřadnicových rovin. Určete souřadnice bodu, který je obraen v pravoúhlé aonometrii.
strana 1 1. onometrie. 1.1 V pravoúhlé aonometrii obrate průmět bodu [4, 5, 8]. 1.2 Zobrate bývající pravoúhlé průmět bodu do souřadnicových rovin. Určete souřadnice bodu, který je obraen v pravoúhlé aonometrii.
Test č. 6. Lineární perspektiva
 Test č. 6 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2008-2009 Lineární perspektiva (1) Nad průměrem A S B S (A, B leží v základní rovině π) sestrojte metodou osmi tečen
Test č. 6 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2008-2009 Lineární perspektiva (1) Nad průměrem A S B S (A, B leží v základní rovině π) sestrojte metodou osmi tečen
1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině.
 Přednáška 1 Mgr.Güttnerová FAST Dg - bakaláři VŠB-TU Ostrava 1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině. Literatura: (1)Černý, J. - Kočandrlová, M.: Konstruktivní
Přednáška 1 Mgr.Güttnerová FAST Dg - bakaláři VŠB-TU Ostrava 1 Rovnoběžné promítání a promítací metody. Nevlastní útvary. Osová afinita v rovině. Literatura: (1)Černý, J. - Kočandrlová, M.: Konstruktivní
Pracovní listy LINEÁRNÍ PERSPEKTIVA
 Tecnická univerita v Liberci Fakulta přírodovědně-umanitní a pedagogická Katedra matematiky a didaktiky matematiky LINEÁRNÍ PERPEKTIVA Petra Pirklová Liberec, květen 07 . Ve stopníkové metodě obrate stupně
Tecnická univerita v Liberci Fakulta přírodovědně-umanitní a pedagogická Katedra matematiky a didaktiky matematiky LINEÁRNÍ PERPEKTIVA Petra Pirklová Liberec, květen 07 . Ve stopníkové metodě obrate stupně
1.1 Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem
 Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Funkce dvou proměnných
 Funkce dvou proměnných Funkce dvou proměnných harmonická vlna Postupné příčné vlnění T=2, = 2 ( t, ) Asin t 2 Asin t T v t Asin 2 T Počátek koná harmonický pohb, ten se šíří dál řadou oscilátorů ve směru
Funkce dvou proměnných Funkce dvou proměnných harmonická vlna Postupné příčné vlnění T=2, = 2 ( t, ) Asin t 2 Asin t T v t Asin 2 T Počátek koná harmonický pohb, ten se šíří dál řadou oscilátorů ve směru
Zadání domácích úkolů a zápočtových písemek
 Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA. Mgr. Ondřej Machů. --- Pracovní verze:
 DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
DESKRIPTIVNÍ GEOMETRIE PRO STUDENTY GYMNÁZIA CH. DOPPLERA Mgr. Ondřej Machů --- Pracovní verze: 6. 10. 2014 --- Obsah Úvodní slovo... - 3-1 Základy promítacích metod... - 4-1.1 Rovnoběžné promítání...
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
PŘEVODY S OZUBENÝMI KOLY
 PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
PŘEVODY S OZUBENÝMI KOLY Vysoká škola technická a ekonomická v Českých Budějovicích Institute of Technology And Business In České Budějovice Tento učební materiál vznikl v rámci projektu "Integrace a podpora
HVrchlík DVrchlík. Anuloid Hrana 3D síť
 TVORBA PLOCH Plochy mají oproti 3D drátovým modelům velkou výhodu, pro snadnější vizualizaci modelů můžeme skrýt zadní plochy a vytvořit stínované obrázky. Plochy dále umožňují vytvoření neobvyklých tvarů.
TVORBA PLOCH Plochy mají oproti 3D drátovým modelům velkou výhodu, pro snadnější vizualizaci modelů můžeme skrýt zadní plochy a vytvořit stínované obrázky. Plochy dále umožňují vytvoření neobvyklých tvarů.
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Kreslení, rýsování. Zobrazení A B. Promítání E 3 E 2
 Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Zářezová metoda Kosoúhlé promítání
 Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
Zářezová metoda Kosoúhlé promítání Mgr. Jan Šafařík Přednáška č. 6 přednášková skupina P-B1VS2 učebna Z240 Základní literatura Jan Šafařík: příprava na přednášku Autorský kolektiv Ústavu matematiky a deskriptivní
Test č. 1. Kuželosečky, afinita a kolineace
 Test č. 1 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2006-2007 Kuželosečky, afinita a kolineace (1) (a) Je dána elipsa E(F 1, F 2, a), F 1 F 2 < 2a. Sestrojte několik bodů
Test č. 1 Deskriptivní geometrie, I. ročník kombinovaného studia FAST, letní semestr 2006-2007 Kuželosečky, afinita a kolineace (1) (a) Je dána elipsa E(F 1, F 2, a), F 1 F 2 < 2a. Sestrojte několik bodů
Zborcené plochy. Lenka Macálková Lenka (Brkos 2011) Brkosí prezentace / 16
 Brkosí prezentace / 16") Zborcené plochy Lenka Macálková Hutník 2011 28.8.-3.9.2011 Lenka (Brkos 2011) Brkosí prezentace 28.8.-3.9.2011 1 / 16 Úvod Plocha je tvořená spojitým pohybem křivky Jedno z možných dělení: přímkové vs.
Zborcené plochy Lenka Macálková Hutník 2011 28.8.-3.9.2011 Lenka (Brkos 2011) Brkosí prezentace 28.8.-3.9.2011 1 / 16 Úvod Plocha je tvořená spojitým pohybem křivky Jedno z možných dělení: přímkové vs.
1. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v
 Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v") . a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
Rhinoceros a matematika_ Ω
 1 x sinx μ z ν α_matematika a Rhinoceros π Rhinoceros a matematika_ Ω cosx arcsinx 2 cotgx φ tgx 3 arctgx 5 y 4 6 arccosx 7 8 9 zpracoval David Seidler vedoucí práce RNDr. Vladimíra Hájková, Ph.D. Fakulta
1 x sinx μ z ν α_matematika a Rhinoceros π Rhinoceros a matematika_ Ω cosx arcsinx 2 cotgx φ tgx 3 arctgx 5 y 4 6 arccosx 7 8 9 zpracoval David Seidler vedoucí práce RNDr. Vladimíra Hájková, Ph.D. Fakulta
Axiomy: Jsou to tvrzení o těchto pojmech a vztazích, která jsou přijata bez důkazů. Například:
 1.Euklidovský prostor 1.1) Základními geomterickými útvary jsou bod přímka a rovina. Základním geometrickým vztahem je vztah incidence, který se většinou opisuje spojeními bod leží na přímce, přímka prochází
1.Euklidovský prostor 1.1) Základními geomterickými útvary jsou bod přímka a rovina. Základním geometrickým vztahem je vztah incidence, který se většinou opisuje spojeními bod leží na přímce, přímka prochází
Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice
 Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice Předmět: Matematika, fyzika Téma: Výpočet délky šroubovice Věk žáků: 16-19 let Časová dotace: Potřebné pomůcky,
Tento výukový materiál byl vytvořen v rámci projektu MatemaTech Matematickou cestou k technice Předmět: Matematika, fyzika Téma: Výpočet délky šroubovice Věk žáků: 16-19 let Časová dotace: Potřebné pomůcky,
3.MONGEOVO PROMÍTÁNÍ. Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru
 3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
3.MONGEOVO PROMÍTÁNÍ A B E 3 E 2 Rovnoběžný průmět 3D těles na rovinu není vzájemně jednoznačné zobrazení, k obrazu neumíme jednoznačně určit objekt v prostoru 3.1.Kartézský souřadnicový systém O počátek
Základní vlastnosti ploch
 plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
Rovnice, soustavy rovnic, funkce, podobnost a funkce úhlů, jehlany a kužely
 Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika (MAT) Rovnice, soustavy rovnic, funkce, podobnost a funkce úhlů, jehlany a kužely Kvarta 4 hodiny týdně Učebna s PC a dataprojektorem (interaktivní
Předmět: Náplň: Třída: Počet hodin: Pomůcky: Matematika (MAT) Rovnice, soustavy rovnic, funkce, podobnost a funkce úhlů, jehlany a kužely Kvarta 4 hodiny týdně Učebna s PC a dataprojektorem (interaktivní
Deskriptivní geometrie
 Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Deskriptivní geometrie Stavebnictví RNDr. Milan Vacka 2013 České Budějovice 1 Tento učební materiál vznikl v rámci projektu "Integrace a podpora studentů se specifickými vzdělávacími potřebami na Vysoké
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA KATEDRA ALGEBRY A GEOMETRIE Diplomová práce Řezy rotačních těles v projekcích Vedoucí diplomové práce: Mgr. Marie Chodorová, Ph.D. Rok odevzdání:
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly.
, prostá cykloida, prostá epicykloida, úpatnice paraboly.") Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
AXONOMETRIE. Rozměry ve směru os (souřadnice bodů) jsou násobkem příslušné jednotky.
 jsou násobkem příslušné jednotky.") AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
AXONOMETRIE 1) Princip, základní pojmy Axonometrie je rovnoběžné promítání do průmětny různoběžné se souřadnicovými rovinami. Kvádr v axonometrii : {O,x,y,z} souřadnicový systém XYZ - axonometrická průmětna
Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost
 stejnou vzdálenost") Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
Kuželosečky Kružnice Definice: Kružnice je množina bodů v rovině, které mají od daného bodu (střed S) stejnou vzdálenost (poloměr r).?! Co získáme, když v definici výraz stejnou nahradíme stejnou nebo
3.1 Magnetické pole ve vakuu a v látkovén prostředí
 3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
Matematika I (KX001) Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0
 Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0") Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Elementární plochy-základní pojmy
 -základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
-základní pojmy Kulová plocha je množina bodů v prostoru, které mají od pevného bodu S stejnou vzdálenost r. Hranolová plocha je určena lomenou čarou k (k σ) a směrem s, který nenáleží dané rovině (s σ),
Konstruktivní geometrie - LI. Konstruktivní geometrie - LI () Kótované promítání 1 / 44
 Kótované promítání 1 / 44") Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
Kótované promítání Konstruktivní geometrie - LI Konstruktivní geometrie - LI () Kótované promítání 1 / 44 Obsah 1 Polohové úlohy 2 Spád přímky a roviny Konstruktivní geometrie - LI () Kótované promítání
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191. Obor 23-41-M/01 STROJÍRENSTVÍ
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA STROJÍRENSKÁ a Jazyková škola s právem státní jazykové zkoušky, Kolín IV, Heverova 191 Obor 23-41-M/01 STROJÍRENSTVÍ 1. ročník TECHNICKÉ KRESLENÍ ÚVOD A DESKRIPTIVNÍ GEOMETRIE
Kuželosečky. Klasické definice. Základní vlastnosti. Alča Skálová
 Kuželosečky Alča Skálová Klasické definice Elipsa je množina všech bodů v rovině, majících od dvou pevně daných různých bodů E, F(ohnisek)konstantnísoučetvzdáleností2a,kde2a > EF =2e. Parabola je množina
Kuželosečky Alča Skálová Klasické definice Elipsa je množina všech bodů v rovině, majících od dvou pevně daných různých bodů E, F(ohnisek)konstantnísoučetvzdáleností2a,kde2a > EF =2e. Parabola je množina
Kuželoseč ky. 1.1 Elipsa
 Kuželoseč ky 1.1 Elipsa Definice: Elipsa je množina všech bodů v 2, které mají od dvou pevných (různých) bodů v 2, zvaných ohniska (značíme F 1, F 2 ), stálý součet vzdáleností rovný 2a, který je větší
Kuželoseč ky 1.1 Elipsa Definice: Elipsa je množina všech bodů v 2, které mají od dvou pevných (různých) bodů v 2, zvaných ohniska (značíme F 1, F 2 ), stálý součet vzdáleností rovný 2a, který je větší
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Technické osvětlení
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Technické osvětlení Vypracoval: Martin Hanuš Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že jsem ročníkovou
Plochy technické praxe
 Masarykova univerzita Přírodovědecká fakulta Plochy technické praxe Diplomová práce Šárka Blaženková Brno, 2006 Prohlášení Prohlašuji, že jsem celou diplomovou práci vypracovala samostaně pouze za použití
Masarykova univerzita Přírodovědecká fakulta Plochy technické praxe Diplomová práce Šárka Blaženková Brno, 2006 Prohlášení Prohlašuji, že jsem celou diplomovou práci vypracovala samostaně pouze za použití
KÓTOVANÉ PROMÍTÁNÍ KÓTOVANÉ PROMÍTÁNÍ
 KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
KÓTOVANÉ PROMÍTÁNÍ 2.KÓTOVANÉ PROMÍTÁNÍ Označíme: s...směr promítání, s p k c...kóta bodu C C 1 (k c )...kótovaný průmět bodu C. pokud k c 0 (k c 0), potom bod C leží nad (pod) průmětnou p. jednotka j=1cm
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice