Úvodní informace. Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní. verze: :47
|
|
|
- Gabriela Černá
- před 6 lety
- Počet zobrazení:
Transkript
1 O předmětu Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 1. přednáška 11MSP 2018 verze: :47
2 O předmětu Obsah přednášky 1 O předmětu Základní organizační informace Seznam literatury Hodnocení předmětu Domácí příprava Vstupní znalosti Výstupní znalosti
3 O předmětu Základní informace Přednášející: Ing. Bohumil Kovář, Ph.D. přednášky čt. 9:45-11:15 a 11:30-13:00 Cvičící: Mgr. Lucie Kárná, Ph.D. (karna@fd.cvut.cz) Mgr. Marek Honců, Ph.D. (honcumar@fd.cvut.cz) Erasmus: Dr. Ing. Jan Přikryl (prikrjan@fd.cvut.cz) Garant předmětu: prof. RNDr. Miroslav Vlček, DrSc. (vlcek@fd.cvut.cz)
4 O předmětu Základní informace Pokračování Domovská stránka předmětu MSP: Cvičení: Pravidla jsou na stránkách předmětu. Cvičení pro druhý zápis: Vzhledem ke kapacitě počítačových laboratoří není možné, aby studenti opakující předmět navštěvovali cvičení. Budou odevzdávat elektronicky zadávané domácí úlohy a v průběhu semestru pro ně vypíšeme dva termíny, na kterých si napíšou písemné testy.
5 O předmětu Literatura I 1 CARLSON, Gordon E. Signal and Linear System Analysis: with Matlab. 2. vyd. New York: John Wiley & Sons, 1998, 768 s. ISBN CHATURVEDI, Devendra K. Modeling and simulation of systems using MATLAB and Simulink. Boca Raton: CRC Press, 2009, 733 s. ISBN ALLEN, Roy G. D. Matematická ekonomie. Praha: Academia, 1971, 782 s. 4 OPPENHEIM, Alan V., Alan S. WILLSKY a Syed Hamid NAWAB. Signals and Systems. 2. vyd. Upper Saddle River: Prentice Hall, 1997, 957 s. ISBN KARBAN, Pavel. Výpočty a simulace v programech Matlab a Simulink. Brno: Computer Press, ISBN
6 O předmětu Literatura II 6 Informace o prostředí MATLAB MatIntro.pdf 7 Matematika-opakování
7 O předmětu Zápočet a zkouška Celkový počet bodů, které studenti mohou během semestru získat, je 40. Ke zkoušce se z toho započítá maximálně 30. Zápočet udělujeme od 25 bodů výše. Body jsou rozděleny následovně: 10 bodů za 3 testy domácí přípravy, 4 body za tři automaticky hodnocené domácí úkoly, 12 bodů za dva praktické testy z Matlabu a Simulinku, 14 bodů za závěrečný test (dva početní příklady po pěti bodech a dvě doplňkové otázky za dva body).
8 O předmětu Zápočet a zkouška Pokračování V průběhu semestru může být vyhlášeno několik bonusových úloh, jejichž úspěšní a nejrychlejší řešitelé budou odměněni až dvěma bonusovými body. Bonusové body se přičítají k celkovému bodovému zisku v semestru. Bodování zaručuje, že v případě získání zápočtu (25 bodů a výše) můžete automaticky předmět absolvovat s klasifikací dostatečně, případně uspokojivě. V případě, že máte zájem o lepší hodnocení, můžete zbylých 20 bodů získat u zkoušky.
9 O předmětu Domácí příprava Témata domácích příprav a na ně navázaných testů: 1. Typy systémů 2. Laplaceova transformace, zpětná Laplaceova transformace a řešení diferenciálních rovnic 3. Z-transformace, zpětná Z-transformace a řešení diferenčních rovnic Domácí přípravy jsou zároveň vaší přípravou na závěrečný test.
10 O předmětu Výsledky 2016/2017 Klasifikováno A E Nezapočteno Počet studujících dle KOS ke dni 21. února 2018 = 97

11 O předmětu Výsledky 2016/2017
12 O předmětu Výsledky 2016/2017 A 12 B C A B C Nulová účast na cvičeních a testech Přestalo docházet na cvičení a testy Nesplnilo požadavky udělení zápočtu
13 O předmětu Znalosti vstupní Toto jsou znalosti, u nichž předpokládáme, že je ovládáte. Jejich neznalost se neomlouvá. 1 Znalost základních pojmů a operací s vektory a maticemi 2 Znalost práce s komplexními čísly a základů funkcí komplexní proměnné 3 Znalost vlastností trigonometrických, hyperbolických, exponenciálních funkcí 4 Znalost výpočtu součtů nekonečné řady, derivace a integrálů funkce jedné proměnné 5 Znalost práce se zlomky, algebraickými výrazy a běžné středoškolské matematiky 6 Základní znalosti prostředí SCILAB/MATLAB (v rozsahu předmětů 11PT a 11STS)
14 O předmětu Znalosti výstupní 1 Znalost použití Laplaceovy transformace pro řešení diferenciálních rovnic popisujících spojité lineární časově invariantní systémy 2 Znalost použití Z-transformace pro řešení diferenčních rovnic popisujících diskrétní lineární časově invariantní systémy 3 Znalost nalezení stavového popisu ze slovního zadání dynamického systému 4 Znalost použití pojmu stabilita řešení a metody ověření stability dynamického systému 5 Znalost prostředí MATLAB/SIMULINK pro modelování dynamických systémů a řešení soustav nelineárních diferenciálních a diferenčních rovnic
15 Obsah přednášky 2 Matematické modelování systémů Jaké cíle může modelování dosáhnout? Klasifikace modelů Fáze modelování Model systému Vnější popis systémů Vnitřní popis systémů 3
16 Sestavení Studium Testování Použití Tento proces opakovaných iterací je pro modelovací projekty typický a je jedním z nejužitečnějších aspektů modelování, pokud jde o lepší pochopení toho, jak systém funguje. Toto rozdělení činnosti v oblasti modelování budeme používat i nadále a bude tvořit strukturu pro zbytek tohoto kurzu.
17 Systém Definition (Systém) Charakteristické vlastnosti, se kterými vystačíme při modelování: systém považujeme za část prostředí, kterou lze od jejího okoĺı oddělit fyzickou nebo myšlenkovou hranicí, systém se skládá z podsystémů, vzájemně propojených součástí. Je to část našeho světa, která se svým okoĺım nějak interaguje, například prostřednictvím vstupu a výstupu.
18 Co je modelování? Model Za model můžeme pokládat náhradu nebo zjednodušení skutečného objektu reálného světa z hlediska jeho vlastností a funkčnosti. Modelování je možné pouze pokud zavedeme určitý stupeň abstrakce a aproximace.
19 Diskrétní a spojitý model vstup? výstup u(t) u[n] spojitý systém diskrétní systém y(t) y[n]

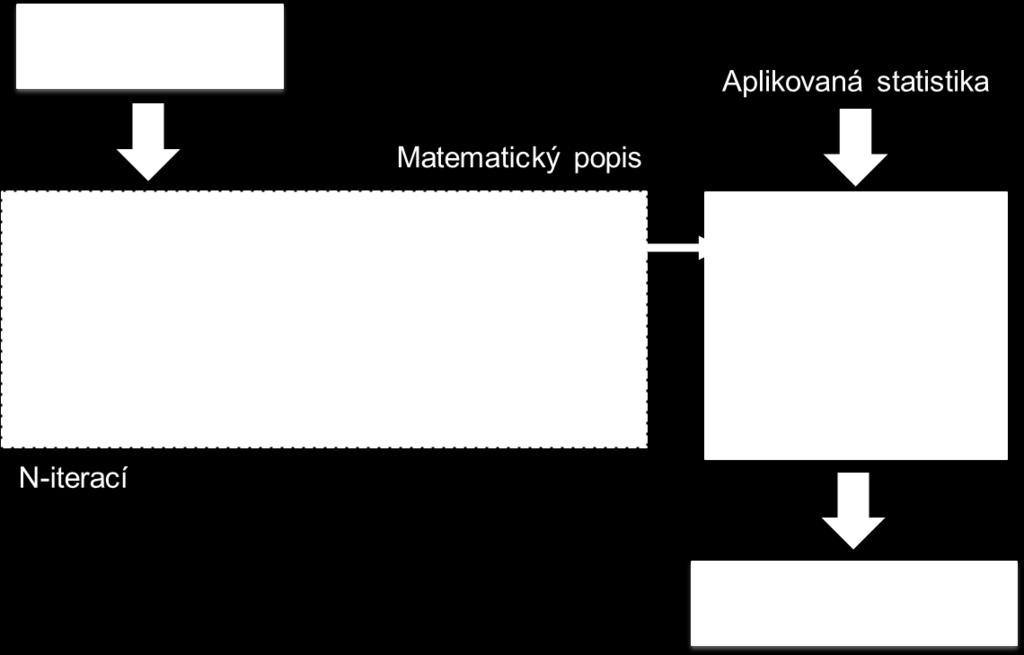
20 Tvorba modelu

21 Tvorba modelu Při analýze navrženého modelu chceme učinit co možná nejsilnější rozhodnutí na základě malého množství dat. Správnost našeho návrhu je nutné statisticky vyhodnotit. Problémy: 1 Významné diference ve sledovaných parametrech mohou být způsobeny špatným návrhem modelu, případně měřením dat 2 Je těžké rozlišit, zda diference v datech jsou skutečné nebo způsobené náhodným vlivem.
22 Proč modelování systémů? Otázky: Jak ověříme správnost výpočtu rychlosti šíření ptačí chřipky? Jak ověříme pevnost nového mostu? Jak ověříme bezpečnost softwaru? Pokud nemůžeme předem prokázat určité vlastnosti na samotného systému, prokážeme hledané vlastnosti na jeho modelu!

23 Modely reálného světa Antoni Gaudí

24 Modely reálného světa Antoni Gaudí

25 Modely reálného světa VW Polo crash test
26 Vnější popis systémů Vnější popis vychází z popisu systému vektorem vstupu u a vektorem výstupu y. Systém tak chápeme jako černou skříňku, o jejíchž vlastnostech se dozvíme pouze tehdy, jestliže budeme zkoumat její reakci na vnější události (signály, data). Vnější model popisujeme diferenciální rovnicí pro systémy se spojitým časem a diferenční rovnicí pro systémy s diskrétním časem. Uvedená rovnice je obecně vyššího řádu, než 1.
27 Vnitřní popis systémů Vnitřní, tzv. stavový popis systému používá k popisu dynamiky systému vektor vnitřních stavů x. Vektor vstupů u a vektor výstupních veličin y jsou druhotné veličiny vnitřního popisu. Stavové modely popisujeme soustavou diferenciálních rovnic prvního řádu pro systémy se spojitým časem a soustavou diferenčních rovnic prvého řádu pro systémy s diskrétním časem.
28 Role matematiky Modelování není samospasitelné: výstupy modelu je vždy třeba ověřovat, možné chyby jsou jak v modelu, tak i v jeho výpočtu. Verifikace: Počítáme správný model. Validace: Model počítá správně.
29 Obsah přednášky 2 Matematické modelování systémů 3

30 Zombie apokalypsa SIR model (1/8)
31 Zombie apokalypsa SIR model(2/8) Rovnice SIR modelu S (t) = αi (t)s(t) R (t) = βi (t) I (t) = S (t) R (t) = αi (t)s(t) βi (t) S(t) I (t) R(t) počet zdravých jedinců počet infikovaných počet mrtvých nebo imunních S(t) + I (t) + R(t) = c S (t) + I (t) + R (t) = 0
32 Zombie apokalypsa SIR model - Numerické řešení (3/8) Co nám tyto rovnice říkají? Předpokládejme, populaci S(0) = zdravých jedinců, I (0) = 10 Zombies a R(0) = 10 imunních s mírou šíření nákazy α = a úmrtností β = 0.1. V čase t = 0, tedy dnes: S (0) = αi (0)S(0) = 100 R (0) = βi (0) = 1 I (0) = S (0) R (0) = αi (0)S(0) βi (0) = 99 První den Zombie apokalypsy se počet zdravých jedinců sníží o 100, jeden člověk zemře a množství infikovaných vzroste o 99.
33 Zombie apokalypsa SIR model - Numerické řešení(4/8) Zítra, v čase t = 1 můžeme tedy očekávat S(1) S(0) + S (0) = R(1) R(0) + R (0) = 11 I (1) I (0) + I (0) = 109 a S (1) = αi (1)S(1) = R (1) = βi (1) = 10.9 I (1) = S (1) R (1) = αi (1)S(1) βi (1) =
34 Zombie apokalypsa SIR model - Numerické řešení (5/8) Rovnice nám umožňují odhadovat změny S, I, R i v minulosti. Pokud známe stav apokalypsy dnes (v čase t = 0), pak můžeme odhadnout hodnoty včera (v čase t = 1) jako S( 1) S(0) S (0) R( 1) R(0) R (0) I ( 1) I (0) I (0) Takto můžeme numericky analyzovat změny S, I a R v čase a predikovat, jak se bude apokalypsa vyvíjet. Jedná se o rekurentní výpočty, které jsou s použitím počítače velmi snadné.
35 Zombie apokalypsa SIR model - Simulink (6/8)
36 Zombie apokalypsa SIR model - Simulink (7/8) 10 x Time offset: 0 α = , β = 0.11, S(0) = , I (0) = R(0) = 10
37 Zombie apokalypsa SIR model - Analytické řešení (8/8) Analýza rovnice pro infikované Pokud I (t) = αs(t)i (t) βi (t) = (αs(t) β)i (t) S(t) > β α pak I (t) > 0 a tedy apokalypsa se zhoršuje a počet Zombies roste, S(t) < β α pak I (t) < 0 situace se lepší a počet Zombies klesá, β α je práh. Počet infikovaných tedy bude klesat, pokud se nám podaří snížit hodnotu koeficientu α, případně i β.

38 Romeo a Julie Love model (1/8)
39 Romeo a Julie Love model 1 (2/8) Předpokládejme, že funkce R(t) popisuje lásku Romea k Julii v čase t a funkce J(t) popisuje lásku Julie k Romeovi. Předpokládejme, že kladné hodnoty funkcí R(t) a J(t) představují lásku, vášeň atp., záporné hodnoty nenávist a nulové hodnoty lhostejnost. Rovnice modelu R (t) = rrr(t) + rjj(t) J (t) = jrr(t) + jjj(t) 1 S. H. Strogatz: Love Affairs and Differential Equations
40 Romeo a Julie Love model (3/8)
41 Romeo a Julie Love model [rr=0.5, rj = 0.2, jj = 0.7, jr = 0.5] (4/8)
42 Romeo a Julie Love model [rr=-0.6, rj = -2, jj = 0.7, jr = 0.8] (5/8)
43 Romeo a Julie Love model [rr=0.1, rj = -0.5, jj = -0.3, jr = 0.7] (6/8)
44 Romeo a Julie Love model [rr=0.1, rj = -0.4, jj = -0.1, jr = 0.1] (7/8)

45 Na závěr Děkuji za pozornost. Až budete utíkat, prosím opatrně.
Úvodní informace. Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní. verze: :18
 O předmětu Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 1. přednáška 11MSP 2019 verze:
O předmětu Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 1. přednáška 11MSP 2019 verze:
(K611MSAP) prof. Miroslav Vlček. 24. února Ústav aplikované matematiky Fakulta dopravní ČVUT
 prof. Miroslav Vlček. 24. února Ústav aplikované matematiky Fakulta dopravní ČVUT") (K611MSAP) Ústav aplikované matematiky Fakulta dopravní ČVUT 24. února 2011 K611MSAP Základní informace Přednášející: prof. RNDr. Miroslav Vlček, DrSc. (vlcek@fd.cvut.cz) přednášky: čt. 8.00-9.30 & 9.45-11.15
(K611MSAP) Ústav aplikované matematiky Fakulta dopravní ČVUT 24. února 2011 K611MSAP Základní informace Přednášející: prof. RNDr. Miroslav Vlček, DrSc. (vlcek@fd.cvut.cz) přednášky: čt. 8.00-9.30 & 9.45-11.15
Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP)
") Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl 1. přednáška 11MSP čtvrtek 20. února 2014 verze: 2014-03-05 15:37 Obsah O předmětu 2 Základní organizační
Úvodní informace Matematické modelování Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl 1. přednáška 11MSP čtvrtek 20. února 2014 verze: 2014-03-05 15:37 Obsah O předmětu 2 Základní organizační
1. března Organizace Základní informace Literatura Úvod Motivace... 3
 Modelování systémů a procesů (611MSP) Děčín přednáška 1 Vlček, Kovář, Přikryl 1. března 2012 Obsah 1 Organizace 1 1.1 Přednášející....................................... 1 1.2 Základní informace...................................
Modelování systémů a procesů (611MSP) Děčín přednáška 1 Vlček, Kovář, Přikryl 1. března 2012 Obsah 1 Organizace 1 1.1 Přednášející....................................... 1 1.2 Základní informace...................................
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Návrh a vyhodnocení experimentu
 Návrh a vyhodnocení experimentu Návrh a vyhodnocení experimentů v procesech vývoje a řízení kvality vozidel Ing. Bohumil Kovář, Ph.D. FD ČVUT Ústav aplikované matematiky kovar@utia.cas.cz Mladá Boleslav
Návrh a vyhodnocení experimentu Návrh a vyhodnocení experimentů v procesech vývoje a řízení kvality vozidel Ing. Bohumil Kovář, Ph.D. FD ČVUT Ústav aplikované matematiky kovar@utia.cas.cz Mladá Boleslav
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Modelování a simulace Lukáš Otte
 Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Modelování a simulace 2013 Lukáš Otte Význam, účel a výhody MaS Simulační modely jsou nezbytné pro: oblast vědy a výzkumu (základní i aplikovaný výzkum) analýzy složitých dyn. systémů a tech. procesů oblast
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
Návrh a vyhodnocení experimentu
 Návrh a vyhodnocení experimentu Návrh a vyhodnocení experimentů v procesech vývoje a řízení kvality vozidel Ing. Bohumil Kovář, Ph.D. FD ČVUT Ústav aplikované matematiky kovar@utia.cas.cz Mladá Boleslav
Návrh a vyhodnocení experimentu Návrh a vyhodnocení experimentů v procesech vývoje a řízení kvality vozidel Ing. Bohumil Kovář, Ph.D. FD ČVUT Ústav aplikované matematiky kovar@utia.cas.cz Mladá Boleslav
Elektronické obvody analýza a simulace
 Elektronické obvody analýza a simulace Jiří Hospodka katedra Teorie obvodů, 804/B3 ČVUT FEL 4. října 2006 Jiří Hospodka (ČVUT FEL) Elektronické obvody analýza a simulace 4. října 2006 1 / 7 Charakteristika
Elektronické obvody analýza a simulace Jiří Hospodka katedra Teorie obvodů, 804/B3 ČVUT FEL 4. října 2006 Jiří Hospodka (ČVUT FEL) Elektronické obvody analýza a simulace 4. října 2006 1 / 7 Charakteristika
Laplaceova transformace
 Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Speciální numerické metody 4. ročník bakalářského studia. Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D.
 Speciální numerické metody 4. ročník bakalářského studia Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D. 1 Základní informace o cvičení Předmět: 228-0210/01 Speciální numerické metody
Speciální numerické metody 4. ročník bakalářského studia Cvičení: Ing. Petr Lehner Přednášky: doc. Ing. Martin Krejsa, Ph.D. 1 Základní informace o cvičení Předmět: 228-0210/01 Speciální numerické metody
Rovnice matematické fyziky cvičení pro akademický školní rok 2013-2014
 Harmonogram výuky předmětu Rovnice matematické fyziky cvičení pro akademický školní rok 2013-2014 Vedoucí cvičení: ing. Václav Klika, Ph.D. & MSc. Karolína Korvasová & & ing. Matěj Tušek, Ph.D. Katedra
Harmonogram výuky předmětu Rovnice matematické fyziky cvičení pro akademický školní rok 2013-2014 Vedoucí cvičení: ing. Václav Klika, Ph.D. & MSc. Karolína Korvasová & & ing. Matěj Tušek, Ph.D. Katedra
U Úvod do modelování a simulace systémů
 U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
U Úvod do modelování a simulace systémů Vyšetřování rozsáhlých soustav mnohdy nelze provádět analytickým výpočtem.často je nutné zkoumat chování zařízení v mezních situacích, do kterých se skutečné zařízení
Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan Vyčichl, Ph.D.
 Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Základy matematiky pro FEK
 Základy matematiky pro FEK 1. přednáška 22.9.2016 Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 19 Organizační pokyny přednášející:
Základy matematiky pro FEK 1. přednáška 22.9.2016 Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 19 Organizační pokyny přednášející:
Propojení matematiky, fyziky a počítačů
 Propojení matematiky, fyziky a počítačů Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ..7/.3./45.9 V Ústí n. L., únor 5 Ing. Radek Honzátko, Ph.D. Propojení matematiky, fyziky a počítačů
Propojení matematiky, fyziky a počítačů Název projektu: Věda pro život, život pro vědu Registrační číslo: CZ..7/.3./45.9 V Ústí n. L., únor 5 Ing. Radek Honzátko, Ph.D. Propojení matematiky, fyziky a počítačů
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Parciální diferenciální rovnice
 Parciální diferenciální rovnice Obsah kurzu Co bude obsahovat... úvod do PDR odvození některých PDR klasická teorie lineárních PDR 1. a 2. řádu řešení poč. a okraj. úloh vlastnosti řešení souvislost s
Parciální diferenciální rovnice Obsah kurzu Co bude obsahovat... úvod do PDR odvození některých PDR klasická teorie lineárních PDR 1. a 2. řádu řešení poč. a okraj. úloh vlastnosti řešení souvislost s
Ústav technologie, mechanizace a řízení staveb. CW01 - Teorie měření a regulace 10.2 ZS 2010/2011. reg Ing. Václav Rada, CSc.
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 10.2 reg-2 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření Teorie
21. Úvod do teorie parciálních diferenciálních rovnic
 21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
STATISTIKA LS 2013. Garant předmětu: Ing. Martina Litschmannová, Ph.D. Přednášející: Ing. Martina Litschmannová, Ph.D.
 STATISTIKA LS 2013 Garant předmětu: Ing. Martina Litschmannová, Ph.D. Přednášející: Ing. Martina Litschmannová, Ph.D. Cvičící: Ing. Ondřej Grunt RNDr. Pavel Jahoda, Ph.D. Ing. Kateřina Janurová Mgr. Tereza
STATISTIKA LS 2013 Garant předmětu: Ing. Martina Litschmannová, Ph.D. Přednášející: Ing. Martina Litschmannová, Ph.D. Cvičící: Ing. Ondřej Grunt RNDr. Pavel Jahoda, Ph.D. Ing. Kateřina Janurová Mgr. Tereza
DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky DIPLOMOVÁ PRÁCE Nelineární řízení magnetického ložiska 2004 Jan KRYŠTŮFEK Motivace Účel diplomové práce: Porovnání nelineárního řízení
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VII. SYSTÉMY ZÁKLADNÍ POJMY SYSTÉM - DEFINICE SYSTÉM (řec.) složené, seskupené (v
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VII. SYSTÉMY ZÁKLADNÍ POJMY SYSTÉM - DEFINICE SYSTÉM (řec.) složené, seskupené (v
časovém horizontu na rozdíl od experimentu lépe odhalit chybné poznání reality.
 Modelování dynamických systémů Matematické modelování dynamických systémů se využívá v různých oborech přírodních, technických, ekonomických a sociálních věd. Použití matematického modelu umožňuje popsat
Modelování dynamických systémů Matematické modelování dynamických systémů se využívá v různých oborech přírodních, technických, ekonomických a sociálních věd. Použití matematického modelu umožňuje popsat
APROXIMACE KŘIVEK V MATLABU NEWTONŮV INTERPOLAČNÍ POLYNOM CURVE FITTING IN MATLAB NEWTON INTERPOLATION POLYNOMIAL
 APROXIMACE KŘIVEK V MATLABU NEWTONŮV INTERPOLAČNÍ POLYNOM CURVE FITTING IN MATLAB NEWTON INTERPOLATION POLYNOMIAL Jiří Kulička 1 Anotace: Článek se zabývá odvozením, algoritmizací a popisem konstrukce
APROXIMACE KŘIVEK V MATLABU NEWTONŮV INTERPOLAČNÍ POLYNOM CURVE FITTING IN MATLAB NEWTON INTERPOLATION POLYNOMIAL Jiří Kulička 1 Anotace: Článek se zabývá odvozením, algoritmizací a popisem konstrukce
11MAMY LS 2017/2018. Úvod do Matlabu. 21. února Skupina 01. reseni2.m a tak dále + M souborem zadané funkce z příkladu 3 + souborem skupina.
 11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
4EK201 Matematické modelování. 11. Ekonometrie
 4EK201 Matematické modelování 11. Ekonometrie 11. Ekonometrie Ekonometrie Interdisciplinární vědní disciplína Zkoumá vztahy mezi ekonomickými veličinami Mikroekonomickými i makroekonomickými Ekonomie ekonomické
4EK201 Matematické modelování 11. Ekonometrie 11. Ekonometrie Ekonometrie Interdisciplinární vědní disciplína Zkoumá vztahy mezi ekonomickými veličinami Mikroekonomickými i makroekonomickými Ekonomie ekonomické
Úvod do modelování a simulace. Ing. Michal Dorda, Ph.D.
 Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Úvod do modelování a simulace systémů Ing. Michal Dorda, Ph.D. 1 Základní pojmy Systém systémem rozumíme množinu prvků (příznaků) a vazeb (relací) mezi nimi, která jako celek má určité vlastnosti. Množinu
Modelování a simulace
 Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
Modelování a simulace Doc Ing Pavel Václavek, PhD Modelování a simulace Úvod - str /48 Obsah a organizace Obsah a org Cíl předmětu Náplň přednášek Vyučující Hodnocení Literatura Modelování a simulace Úvod
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
MATEMATIKA III. Olga Majlingová. Učební text pro prezenční studium. Předběžná verze
 Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni. Abstrakt
 VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
VYUŽITÍ MATLABU PRO VÝUKU NUMERICKÉ MATEMATIKY Josef Daněk Centrum aplikované matematiky, Západočeská univerzita v Plzni Abstrakt Současný trend snižování počtu kontaktních hodin ve výuce nutí vyučující
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
4EK311 Operační výzkum. 1. Úvod do operačního výzkumu
 4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
4EK311 Operační výzkum 1. Úvod do operačního výzkumu Mgr. Jana SEKNIČKOVÁ, Ph.D. Nová budova, místnost 433 Konzultační hodiny InSIS E-mail: jana.seknickova@vse.cz Web: jana.seknicka.eu/vyuka Garant kurzu:
Bonn, Rheinischen Friedrich-Wilhelms-Universität
 Bonn, Rheinischen Friedrich-Wilhelms-Universität Seznam přednášek Bc s anotacemi http://www.mathematics.uni-bonn.de/files/bachelor/ba_modulhandbuch.pdf Studijní plán-požadavky http://www.mathematics.uni-bonn.de/studium/bachelor/studienprogramm
Bonn, Rheinischen Friedrich-Wilhelms-Universität Seznam přednášek Bc s anotacemi http://www.mathematics.uni-bonn.de/files/bachelor/ba_modulhandbuch.pdf Studijní plán-požadavky http://www.mathematics.uni-bonn.de/studium/bachelor/studienprogramm
Diferenciální rovnice 1
 Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
CVIČENÍ 4 Doc.Ing.Kateřina Hyniová, CSc. Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze 4.
 CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
Základy algoritmizace
 Základy algoritmizace Matematické algoritmy (11MAG) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 1. přednáška 11MAG pondělí 5. října 2014 verze: 2014-10-06 11:27 Obsah přednášky
Základy algoritmizace Matematické algoritmy (11MAG) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 1. přednáška 11MAG pondělí 5. října 2014 verze: 2014-10-06 11:27 Obsah přednášky
Diferenciální rovnice 3
 Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Modelov an ı syst em u a proces
 Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory
 Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
DISKRÉTNÍ PROCESY V ELEKTROTECHNICE
 Výuka předmětu DISKRÉTNÍ PROCESY V ELEKTROTECHNICE Jaromír Baštinec, Ústav matematiky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně e-mail: bastinec@feec.vutbr.cz Irena Hlavičková Ústav
Výuka předmětu DISKRÉTNÍ PROCESY V ELEKTROTECHNICE Jaromír Baštinec, Ústav matematiky, Fakulta elektrotechniky a komunikačních technologií, VUT v Brně e-mail: bastinec@feec.vutbr.cz Irena Hlavičková Ústav
Diskrétní matematika. DiM /01, zimní semestr 2017/2018
 Diskrétní matematika Petr Kovář petr.kovar@vsb.cz Vysoká škola báňská Technická univerzita Ostrava DiM 470-2301/01, zimní semestr 2017/2018 O tomto souboru Tento soubor je zamýšlen především jako pomůcka
Diskrétní matematika Petr Kovář petr.kovar@vsb.cz Vysoká škola báňská Technická univerzita Ostrava DiM 470-2301/01, zimní semestr 2017/2018 O tomto souboru Tento soubor je zamýšlen především jako pomůcka
Cvičení z matematiky jednoletý volitelný předmět
 Název předmětu: Zařazení v učebním plánu: Cvičení z matematiky O8A, C4A, jednoletý volitelný předmět Cíle předmětu Obsah předmětu je zaměřen na přípravu studentů gymnázia na společnou část maturitní zkoušky
Název předmětu: Zařazení v učebním plánu: Cvičení z matematiky O8A, C4A, jednoletý volitelný předmět Cíle předmětu Obsah předmětu je zaměřen na přípravu studentů gymnázia na společnou část maturitní zkoušky
Lineární stabilita a teorie II. řádu
 Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Lineární stabilita a teorie II. řádu Sestavení podmínek rovnováhy na deformované konstrukci Konstrukce s a bez počáteční imperfekce Výpočet s malými vs. s velkými deformacemi ANKC-C 1 Zatěžovacídráhy [Šejnoha,
Aplikovaná matematika I
 Metoda nejmenších čtverců Aplikovaná matematika I Dana Říhová Mendelu Brno c Dana Říhová (Mendelu Brno) Metoda nejmenších čtverců 1 / 8 Obsah 1 Formulace problému 2 Princip metody nejmenších čtverců 3
Metoda nejmenších čtverců Aplikovaná matematika I Dana Říhová Mendelu Brno c Dana Říhová (Mendelu Brno) Metoda nejmenších čtverců 1 / 8 Obsah 1 Formulace problému 2 Princip metody nejmenších čtverců 3
Ing. Michael Rost, Ph.D.
 Statistika úvodní přednáška Ing. Michael Rost, Ph.D. Jihočeská univerzita v Českých Budějovicích Cíle základního kurzu: seznámit posluchače se základy počtu pravděpodobnosti, seznámit posluchače s aspekty
Statistika úvodní přednáška Ing. Michael Rost, Ph.D. Jihočeská univerzita v Českých Budějovicích Cíle základního kurzu: seznámit posluchače se základy počtu pravděpodobnosti, seznámit posluchače s aspekty
Odpružená sedačka. Petr Školník, Michal Menkina. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií
 Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Petr Školník, Michal Menkina TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247, který je spolufinancován
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
STATISTIKA. Inovace předmětu. Obsah. 1. Inovace předmětu STATISTIKA... 2 2. Sylabus pro předmět STATISTIKA... 3 3. Pomůcky... 7
 Inovace předmětu STATISTIKA Obsah 1. Inovace předmětu STATISTIKA... 2 2. Sylabus pro předmět STATISTIKA... 3 3. Pomůcky... 7 1 1. Inovace předmětu STATISTIKA Předmět Statistika se na bakalářském oboru
Inovace předmětu STATISTIKA Obsah 1. Inovace předmětu STATISTIKA... 2 2. Sylabus pro předmět STATISTIKA... 3 3. Pomůcky... 7 1 1. Inovace předmětu STATISTIKA Předmět Statistika se na bakalářském oboru
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Odhad stavu matematického modelu křižovatek
 Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
Odhad stavu matematického modelu křižovatek Miroslav Šimandl, Miroslav Flídr a Jindřich Duník Katedra kybernetiky & Výzkumné centrum Data-Algoritmy-Rozhodování Fakulta aplikovaných věd Západočeská univerzita
MATURITNÍ TÉMATA Z MATEMATIKY
 MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
MATURITNÍ TÉMATA Z MATEMATIKY 1. Základní poznatky z logiky a teorie množin Pojem konstanty a proměnné. Obor proměnné. Pojem výroku a jeho pravdivostní hodnota. Operace s výroky, složené výroky, logické
Modelování polohových servomechanismů v prostředí Matlab / Simulink
 Modelování polohových servomechanismů v prostředí Matlab / Simulink Lachman Martin, Mendřický Radomír Elektrické pohony a servomechanismy 27.11.2013 Struktura programu MATLAB-SIMULINK 27.11.2013 2 SIMULINK
Modelování polohových servomechanismů v prostředí Matlab / Simulink Lachman Martin, Mendřický Radomír Elektrické pohony a servomechanismy 27.11.2013 Struktura programu MATLAB-SIMULINK 27.11.2013 2 SIMULINK
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
AVDAT Nelineární regresní model
 AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
AVDAT Nelineární regresní model Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Nelineární regresní model Ey i = f (x i, β) kde x i je k-členný vektor vysvětlujících proměnných
ALGEBRA. Téma 5: Vektorové prostory
 SLEZSKÁ UNIVERZITA V OPAVĚ Matematický ústav v Opavě Na Rybníčku 1, 746 01 Opava, tel. (553) 684 611 DENNÍ STUDIUM Téma 5: Vektorové prostory Základní pojmy Vektorový prostor nad polem P, reálný (komplexní)
SLEZSKÁ UNIVERZITA V OPAVĚ Matematický ústav v Opavě Na Rybníčku 1, 746 01 Opava, tel. (553) 684 611 DENNÍ STUDIUM Téma 5: Vektorové prostory Základní pojmy Vektorový prostor nad polem P, reálný (komplexní)
Projekt IMPLEMENTACE ŠVP. pořadí početních operací, dělitelnost, společný dělitel a násobek, základní početní operace
 Střední škola umělecká a řemeslná Evropský sociální fond "Praha a EU: Investujeme do vaší budoucnosti" Projekt IMPLEMENTACE ŠVP Evaluace a aktualizace metodiky předmětu Matematika Výrazy Obory nástavbového
Střední škola umělecká a řemeslná Evropský sociální fond "Praha a EU: Investujeme do vaší budoucnosti" Projekt IMPLEMENTACE ŠVP Evaluace a aktualizace metodiky předmětu Matematika Výrazy Obory nástavbového
CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I
 Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Numerické řešení modelu proudění v porézní hornině s puklinou
 Numerické řešení modelu proudění v porézní hornině s puklinou Martin Hanek Úvod Vedoucí práce prof. RNDr. Pavel Burda, CSc. Zajímá nás jednofázová tekutina v puklině porézní horniny. Studie je provedena
Numerické řešení modelu proudění v porézní hornině s puklinou Martin Hanek Úvod Vedoucí práce prof. RNDr. Pavel Burda, CSc. Zajímá nás jednofázová tekutina v puklině porézní horniny. Studie je provedena
ANALÝZA KONSTRUKCÍ. zimní semestr
 ANALÝZA KONSTRUKCÍ zimní semestr 2016-2017 ANKC analýza konstrukcí prof. Ing. Petr Konvalinka, CSc., FEng. katedra mechaniky vedoucí Experimentálního centra FSv, D1038 konzultace : pondělí 15:00 16:00
ANALÝZA KONSTRUKCÍ zimní semestr 2016-2017 ANKC analýza konstrukcí prof. Ing. Petr Konvalinka, CSc., FEng. katedra mechaniky vedoucí Experimentálního centra FSv, D1038 konzultace : pondělí 15:00 16:00
ANALÝZA KONSTRUKCÍ. zimní semestr
 ANALÝZA KONSTRUKCÍ zimní semestr 2009-2010 ANKC analýza konstrukcí Prof. Ing. Petr Konvalinka, CSc. katedra mechaniky, B316 vedoucí Experimentálního centra FSv, D1038 konzultace : pondělí 8:00 9:00 hodin,
ANALÝZA KONSTRUKCÍ zimní semestr 2009-2010 ANKC analýza konstrukcí Prof. Ing. Petr Konvalinka, CSc. katedra mechaniky, B316 vedoucí Experimentálního centra FSv, D1038 konzultace : pondělí 8:00 9:00 hodin,
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
KTE / PPEL Počítačová podpora v elektrotechnice
 24. 9. 2014 KTE / PPEL Počítačová podpora v elektrotechnice Ing. Lenka Šroubová, Ph.D. email: lsroubov@kte.zcu.cz ICQ: 361057825 http://home.zcu.cz/~lsroubov tel.: +420 377 634 623 Místnost: EK602 Katedra
24. 9. 2014 KTE / PPEL Počítačová podpora v elektrotechnice Ing. Lenka Šroubová, Ph.D. email: lsroubov@kte.zcu.cz ICQ: 361057825 http://home.zcu.cz/~lsroubov tel.: +420 377 634 623 Místnost: EK602 Katedra
ZS: 2017/2018 NMAF061 F/2 J. MÁLEK. Matematika pro fyziky I. Posluchárna: T2 T1 Konzultační hodiny: pátek 9:40-10:30, posluchárna T5
 ZS: 2017/2018 NMAF061 F/2 J. MÁLEK Matematika pro fyziky I OBECNÉ INFORMACE A SYLABUS Přednášející: Cvičící: Josef Málek Michal Báthory, Tomáš Los, Michal Pavelka, Vít Průša Termíny přednášek: Čtvrtek
ZS: 2017/2018 NMAF061 F/2 J. MÁLEK Matematika pro fyziky I OBECNÉ INFORMACE A SYLABUS Přednášející: Cvičící: Josef Málek Michal Báthory, Tomáš Los, Michal Pavelka, Vít Průša Termíny přednášek: Čtvrtek
MATEMATIKA PRO INŽENÝRY 21. STOLETÍ
 MATEMATIKA PRO INŽENÝRY 21. STOLETÍ Schůzka realizačního týmu 8. 9. 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky PROGRAM SCHŮZKY: Pilotní kurzy
MATEMATIKA PRO INŽENÝRY 21. STOLETÍ Schůzka realizačního týmu 8. 9. 2011 Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky PROGRAM SCHŮZKY: Pilotní kurzy
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
České vysoké učení technické v Praze Fakulta jaderná a fyzikálně inženýrská OKRUHY. ke státním závěrečným zkouškám BAKALÁŘSKÉ STUDIUM
 OKRUHY ke státním závěrečným zkouškám BAKALÁŘSKÉ STUDIUM Obor: Studijní program: Aplikace přírodních věd 1. Vektorový prostor R n 2. Podprostory 3. Lineární zobrazení 4. Matice 5. Soustavy lineárních rovnic
OKRUHY ke státním závěrečným zkouškám BAKALÁŘSKÉ STUDIUM Obor: Studijní program: Aplikace přírodních věd 1. Vektorový prostor R n 2. Podprostory 3. Lineární zobrazení 4. Matice 5. Soustavy lineárních rovnic
Teorie náhodných matic aneb tak trochu jiná statistika
 Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
Teorie náhodných matic aneb tak trochu jiná statistika B. Vlková 1, M.Berg 2, B. Martínek 3, O. Švec 4, M. Neumann 5 Gymnázium Uničov 1, Gymnázium Václava Hraběte Hořovice 2, Mendelovo gymnázium Opava
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
2 Hlavní charakteristiky v analýze přežití
 2 Hlavní charakteristiky v analýze přežití Předpokládané výstupy z výuky: 1. Student umí definovat funkci přežití, rizikovou funkci a kumulativní rizikovou funkci a zná funkční vazby mezi nimi 2. Student
2 Hlavní charakteristiky v analýze přežití Předpokládané výstupy z výuky: 1. Student umí definovat funkci přežití, rizikovou funkci a kumulativní rizikovou funkci a zná funkční vazby mezi nimi 2. Student
Statistika (KMI/PSTAT)
") Statistika (KMI/PSTAT) Cvičení dvanácté aneb Regrese a korelace Statistika (KMI/PSTAT) 1 / 18 V souboru 25 jedinců jsme měřili jejich výšku a hmotnost. Výsledky jsou v tabulce a grafu. Statistika (KMI/PSTAT)
Statistika (KMI/PSTAT) Cvičení dvanácté aneb Regrese a korelace Statistika (KMI/PSTAT) 1 / 18 V souboru 25 jedinců jsme měřili jejich výšku a hmotnost. Výsledky jsou v tabulce a grafu. Statistika (KMI/PSTAT)
1. ÚVOD. Arnošt Žídek, Iveta Cholevová. 15. října 2013 FBI VŠB-TUO
 FBI VŠB-TUO 15. října 2013 Kontaktní informace Mgr. Iveta Cholevová, Ph. D. iveta.cholevova@vsb.cz A829, 597 324 146 Mgr. Arnošt Žídek, Ph. D. arnost.zidek@vsb.cz A832, 597 324 177 Předpokládané znalosti
FBI VŠB-TUO 15. října 2013 Kontaktní informace Mgr. Iveta Cholevová, Ph. D. iveta.cholevova@vsb.cz A829, 597 324 146 Mgr. Arnošt Žídek, Ph. D. arnost.zidek@vsb.cz A832, 597 324 177 Předpokládané znalosti
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1
 okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu a, b : 2 ) y i p i+ 1") ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
ODR - okrajová úloha Teorie (velmi stručný výběr z přednášek) Okrajová úloha 2. řádu Budeme hledat řešení y(x) okrajové úlohy pro diferenciální rovnici druhého řádu v samoadjungovaném tvaru na intervalu
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností,
 KMA/SZZS1 Matematika 1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností, operace s limitami. 2. Limita funkce
KMA/SZZS1 Matematika 1. Číselné posloupnosti - Definice posloupnosti, základní vlastnosti, operace s posloupnostmi, limita posloupnosti, vlastnosti limit posloupností, operace s limitami. 2. Limita funkce
Tematický plán Obor: Informační technologie. Vyučující: Ing. Joanna Paździorová
 Tematický plán Vyučující: Ing. Joanna Paździorová 1. r o č n í k 5 h o d i n t ý d n ě, c e l k e m 1 7 0 h o d i n Téma- Tematický celek Z á ř í 1. Opakování a prohloubení učiva základní školy 18 1.1.
Tematický plán Vyučující: Ing. Joanna Paździorová 1. r o č n í k 5 h o d i n t ý d n ě, c e l k e m 1 7 0 h o d i n Téma- Tematický celek Z á ř í 1. Opakování a prohloubení učiva základní školy 18 1.1.
Matematika I. dvouletý volitelný předmět
 Název předmětu: Zařazení v učebním plánu: Matematika I O7A, C3A, O8A, C4A dvouletý volitelný předmět Cíle předmětu Tento předmět je koncipován s cílem usnadnit absolventům gymnázia přechod na vysoké školy
Název předmětu: Zařazení v učebním plánu: Matematika I O7A, C3A, O8A, C4A dvouletý volitelný předmět Cíle předmětu Tento předmět je koncipován s cílem usnadnit absolventům gymnázia přechod na vysoké školy
Měření dat Filtrace dat, Kalmanův filtr
 Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
Měření dat Filtrace dat, Matematické metody pro ITS (11MAMY) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 3. přednáška 11MAMY čtvrtek 28. února 2018 verze: 2018-03-21 16:45 Obsah
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY
 POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
POŽADAVKY K SOUBORNÉ ZKOUŠCE Z MATEMATIKY Bakalářský studijní program B1101 (studijní obory - Aplikovaná matematika, Matematické metody v ekonomice, Aplikovaná matematika pro řešení krizových situací)
Nelineární obvody. V nelineárních obvodech však platí Kirchhoffovy zákony.
 Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Nelineární obvody Dosud jsme se zabývali analýzou lineárních elektrických obvodů, pasivní lineární prvky měly zpravidla konstantní parametr, v těchto obvodech platil princip superpozice a pro analýzu harmonického
Z0076 METEOROLOGIE A KLIMATOLOGIE
 23.9.2013 Z0076 Meteorologie a klimatologie 1 Z0076 METEOROLOGIE A KLIMATOLOGIE Semestr podzim 2013 23.9.2013 Z0076 Meteorologie a klimatologie 2 Osnova 1) Organizace předmětu 2) Podmínky udělení zápočtu
23.9.2013 Z0076 Meteorologie a klimatologie 1 Z0076 METEOROLOGIE A KLIMATOLOGIE Semestr podzim 2013 23.9.2013 Z0076 Meteorologie a klimatologie 2 Osnova 1) Organizace předmětu 2) Podmínky udělení zápočtu
1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15
 Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
Úvodní poznámky... 11 1. Vlastnosti diskretních a číslicových metod zpracování signálů... 15 1.1 Základní pojmy... 15 1.2 Aplikační oblasti a etapy zpracování signálů... 17 1.3 Klasifikace diskretních
9.2. Zkrácená lineární rovnice s konstantními koeficienty
 9.2. Zkrácená lineární rovnice s konstantními koeficienty Cíle Řešíme-li konkrétní aplikace, které jsou popsány diferenciálními rovnicemi, velmi často zjistíme, že fyzikální nebo další parametry (hmotnost,
9.2. Zkrácená lineární rovnice s konstantními koeficienty Cíle Řešíme-li konkrétní aplikace, které jsou popsány diferenciálními rovnicemi, velmi často zjistíme, že fyzikální nebo další parametry (hmotnost,
Obsah Obyčejné diferenciální rovnice
 Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
(Cramerovo pravidlo, determinanty, inverzní matice)
") KMA/MAT1 Přednáška a cvičení, Lineární algebra 2 Řešení soustav lineárních rovnic se čtvercovou maticí soustavy (Cramerovo pravidlo, determinanty, inverzní matice) 16 a 21 října 2014 V dnešní přednášce
KMA/MAT1 Přednáška a cvičení, Lineární algebra 2 Řešení soustav lineárních rovnic se čtvercovou maticí soustavy (Cramerovo pravidlo, determinanty, inverzní matice) 16 a 21 října 2014 V dnešní přednášce
Řízení a optimalizace Stavové modely a model-prediktivní řízení
 Řízení a optimalizace Stavové modely a model-prediktivní řízení Modelování systémů a procesů (11MSP) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 2. přednáška 11MAMY středa 23.
Řízení a optimalizace Stavové modely a model-prediktivní řízení Modelování systémů a procesů (11MSP) Jan Přikryl Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 2. přednáška 11MAMY středa 23.
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb
 Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
4EK211 Základy ekonometrie
 4EK211 Základy ekonometrie Úvod do předmětu obecné informace Základní pojmy ze statistiky / ekonometrie Úvod do programu EViews, Gretl Některé užitečné funkce v MS Excel Cvičení 1 Zuzana Dlouhá Úvod do
4EK211 Základy ekonometrie Úvod do předmětu obecné informace Základní pojmy ze statistiky / ekonometrie Úvod do programu EViews, Gretl Některé užitečné funkce v MS Excel Cvičení 1 Zuzana Dlouhá Úvod do
PŘÍKLAD PŘECHODNÝ DĚJ DRUHÉHO ŘÁDU ŘEŠENÍ V ČASOVÉ OBLASTI A S VYUŽITÍM OPERÁTOROVÉ ANALÝZY
 PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
PŘÍKLAD PŘECHODNÝ DĚJ DRHÉHO ŘÁD ŘEŠENÍ V ČASOVÉ OBLASTI A S VYŽITÍM OPERÁTOROVÉ ANALÝZY A) Časová oblast integro-diferenciální rovnice K obvodu na obrázku je v čase t 0 napětí u b (t). t 0 připojen zdroj
SIMULACE SYSTÉMŮ S ROZPROSTŘENÝMI PARAMETRY V SIMULINKU
 SIMULACE SYSTÉMŮ S ROZPROSTŘENÝMI PARAMETRY V SIMULINKU M. Anderle, P. Augusta 2, O. Holub Katedra řídicí techniky, Fakulta elektrotechnická, České vysoké učení technické v Praze 2 Ústav teorie informace
SIMULACE SYSTÉMŮ S ROZPROSTŘENÝMI PARAMETRY V SIMULINKU M. Anderle, P. Augusta 2, O. Holub Katedra řídicí techniky, Fakulta elektrotechnická, České vysoké učení technické v Praze 2 Ústav teorie informace
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 8. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská