Výpočet nového stavu je závislý na bezprostředně předcházejícím stavu (může jich být i více, zde se však omezíme na jeden).
|
|
|
- Barbora Doležalová
- před 8 lety
- Počet zobrazení:
Transkript
, nazýváme ho časový krok a označujeme symbolem h.")
1 Počáteční úloha Při simulace vývoje systému v čase používáme jednoduché zásady: Spojitý čas nahradíme posloupností časových okamžiků t 0, t 1, t 2, t 3,, t i,. Interval mezi následujícími časovými okamžiky volíme obvykle konstantní ( t = t i+1 t i ), nazýváme ho časový krok a označujeme symbolem h. Stav systému je v každém čase popsán sadou (vektorem) stavových veličin, které plně určují následující vývoj systému. Výpočet nového stavu je závislý na bezprostředně předcházejícím stavu (může jich být i více, zde se však omezíme na jeden). Abychom získali posloupnost následujících stavů představujících vývoj systému, musíme definovat nějaký výchozí stav, od kterého budeme další výpočet odvozovat (počáteční podmínku) odtud název počáteční úloha. Např. pohyb tělesa v homogenním gravitačním poli je popsán stavem (x, y, v x, v y ), tj. složkami jeho souřadnic a rychlostí v rovině. Všechny složky stavového vektoru se v čase mění. V rámci uvedeného třetího bodu můžeme stav v čase t i vyjádřit v závislosti na předcházejícím stavu obecně takto: x i+1 = f 1 (x i, y i, v x,i, v y,i ) y i+1 = f 2 (x i, y i, v x,i, v y,i ) v x,i+1 = f 3 (x i, y i, v x,i, v y,i ) v y,i+1 = f 4 (x i, y i, v x,i, v y,i ) Funkce f 1 f 4 tvoří složky tzv. vektorové funkce a mohou být v našem případě triviální: x i+1 = x i + v x,i.h změnu souřadnic v jednom kroku aproximujeme rovnoměrně zrychleným pohybem; ve směru osy x je zrychlení nulové y i+1 = y i + v y,i.h g.h 2 /2 ve směru osy y existuje zrychlení -g v x,i+1 = v x,i složka rychlosti v ose x se nemění, v tomto směru nepůsobí žádná síla v y,i+1 = v y,i g.h rychlost ve směru osy y klesá působením gravitační síly Připravíme si tedy následující list (zobrazené vzorce odrážejí přepis výše uvedených rovnic): Adresy s parametry úlohy musí být pochopitelně absolutní, nechceme, aby se při kopírování vzorců měnily.
2 Nyní řádek vzorců zkopírujeme do následujících řádků: Z výsledných hodnot ve sloupci x a y sestrojíme bodový graf dráhy tělesa:
, kde v y je vertikální složka")
3 Z vypočtených hodnot y můžeme pomocí funkce MAX nalézt maximální výšku vrhu: Vidíme, že nalezené maximum dobře koresponduje s hodnotou vyplývající ze zákona zachování energie y max = v y 2 /(2g), kde v y je vertikální složka počáteční rychlosti.
4 Pokročilejší řešení se zahrnutím odporu prostředí Šikmý vrh je samozřejmě triviální úloha, která je analyticky řešitelná (parabola). Přidáme-li ke gravitační síle G působící na hmotný bod ještě odpor prostředí, situace se podstatně změní. Analytické řešení úlohy již v takovém případě neexistuje a musíme použít numerický výpočet, jehož základy jsme si vybudovali. Odpor prostředí se projevuje silou T(v), která působí proti směru pohybu a je závislá na velikosti rychlosti. Pro výslednici sil působících na těleso platí: G + T(v) = ma Obvykle předpokládáme, že síla odporu prostředí má tvar T(v) = C v.v, kde C je koeficient odporu prostředí (vždy záporný), který závisí na geometrii objektu a hustotě prostředí. Absolutní hodnota (velikost vektoru) rychlosti je samozřejmě: Podle výše uvedeného vztahu je pak Vektor síly T je tedy orientován proti směru vektoru rychlosti a jeho velikost je úměrná čtverci velikosti rychlosti. V aerodynamice se ukazuje, že tento vztah platí v širokém rozsahu hodnot rychlostí a hustot prostředí. Z uvedených čtyř vztahů získáme vektor okamžitého zrychlení tělesa o složkách: Předpis pro stanovení nového stavu z předcházejícího stavu bude nyní za předpokladu rovnoměrně zrychleného pohybu mezi dvěma stavy vypadat následovně: Na pravé straně rovnic jsou vždy pouze složky původního stavu. Proto také odvozené složky zrychlení musí používat rychlost v původním stavu. Zřetelně zde vidíme hlavní ideu počáteční úlohy: v rámci jednoho kroku považujeme vybrané veličiny za konstantní (zde například zrychlení). Chyba, které se tím dopustíme, bude malá a při menším časovém kroku se rovněž zmenší (úloha konverguje).
.")
5 Poznámka: zrychlení není v tomto případě stavovou veličinou je totiž zcela závislé na jiných stavových veličinách (rychlosti). Řešení Parametry úlohy je třeba rozšířit o koeficient odporu prostředí a o hmotnost vrženého objektu (ta v případě bez odporu prostředí nehraje roli viz Galileův zákon). Pro přehlednost přestěhujeme data s jednotlivými stavy do samostatného listu data a parametry uložíme do listu pojmenovaného např. balistika, který může vypadat např. takto: Do listu jsme přidali ještě počáteční velikost a úhel rychlosti, což nám umožní komfortně měnit počáteční podmínky úlohy. Protože budeme parametry používat ve vzorcích, bývá dobrým zvykem je pojmenovat vzorce jsou pak mnohem přehlednější. Pomocí správce názvů (záložka vzorce) tedy přiřadíme jednotlivým buňkám parametrů názvy např. takto:
. Všimněte si také zlepšení čitelnosti vzorců využitím názvů buněk.")
6 List data si nyní připravíme v následující podobě: Počáteční podmínky zůstali obdobné, pouze složky počátečního vektoru rychlosti vypočítáme z velikosti a úhlu (z polárních souřadnic) pomocí známých vztahů (pozor, úhel ve stupních je třeba převést na radiány). Všimněte si také zlepšení čitelnosti vzorců využitím názvů buněk. Sloupce dat rozšíříme o položky okamžitého zrychlení, které budou naplněny vzorci pro výpočet složek a x a a y z počáteční rychlosti a parametrů úlohy (viz výše): V dalším řádku definujeme vzorce pro výpočet nového stavu pomocí dat předcházejícího stavu s využitím definovaných názvů a vypočtených hodnot zrychlení podle předcházejícího obrázku: Hodnoty zrychlení jsou závislé pouze na položkách rychlosti v tomtéž řádku, proto je lze pouze zkopírovat pomocí úchytu pro kopírování vzorců: Máme tedy připraven celý řádek se vzorci pro výpočet nového stavu, opět ho zkopírujeme pomocí úchytu tentokrát do většího počtu řádků (např. 1000):
7 Velký počet stavů potřebujeme proto, že jsme zvolili relativně malý časový krok (0,01s). Zároveň si vytvoříme rezervu pro nastavení libovolných parametrů úlohy je třeba si uvědomit, že v naší konstrukci je počet vypočtených stavů pevný, i když se jejich obsah mění. Samozřejmě můžeme kdykoli zasáhnout do listu s daty a doplnit je kopírováním o nové stavy, z hlediska komfortu bychom však chtěli, abychom mohli manipulovat pouze s listem s parametry. Do listu balistika nyní vložíme bodový graf, ve formuláři pro výběr dat přitom můžeme z listu data vybrat celé sloupce s hodnotami x a y (klikneme na názvy sloupců B a C). Graf si automaticky vybere jen ty buňky, které obsahují nějaké hodnoty: Graf bude vypadat následovně: Předpokládejme, že nás zajímají jen data před dopadem na zem, tj. stavy, kde y 0. Upravíme proto svislou osu grafu ve formuláři pro vlastnosti hlavní svislé osy následovně:
.")
8 V grafu se nyní potlačí záporné hodnoty ve svislé ose a pro parametry zobrazené v listu bychom měli dostat následující graf, který se při změně parametrů automaticky změní: Pro automatický výpočet maximální výšky letu použijeme opět jednouchý vzorec pro nalezení maximální hodnoty v celém sloupci C s hodnotami y pro všechny stavy =MAX(data!C:C). Tentokrát však již nebude platit teoretický vztah pro maximální výšku jako v předcházejícím případě se zanedbáním odporu prostředí. Počáteční kinetická energie bude částečně spotřebována na překonání odporu prostředí a těleso vystoupá do menší výšky. Zjištění doletu (tj. velikosti hodnoty x v okamžiku dopadu na zem) použijeme následující postup: Nejprve zjistíme číslo řádku v listu data, kde je souřadnice y nejmenší nezáporná. K tomu slouží vyhledávací funkce POZVYHLEDAT (co; kde; jak). První parametr co obsahuje hledanou hodnotu (v našem případě velmi malé záporné číslo, např. -0, ). Druhý parametr kde obsahuje oblast buněk, v níž hodnotu hledáme (v našem případě je to celý sloupec C). Třetím parametrem konečně říkáme, zda v případě, že se nenajde přesně hledaná hodnota, použijeme nejbližší vyšší nebo nižší hodnotu (v našem případě je hodnota parametru -1, tj. použijeme nejbližší vyšší). Pokud tedy do libovolné buňky našeho sešitu vložíme vzorec =POZVYHLEDAT(-0, ;data!C:C;-1) bude vrácená hodnota např. 223, tj. číslo řádku s poslední nezápornou hodnotou ve sloupci C:
.")
9 Pozorný čtenář si jistě všiml, že nemůžeme hledat hodnotu 0, protože ta je obsažena hned v prvním řádku dat (počáteční podmínce). Dolet tělesa je obsažen ve sloupci B na stejném řádku. Funkce, která vrací požadovanou buňku v požadovaném řádku se nazývá INDEX(kde, číslo). Parametr kde definuje oblast (v našem případě sloupec B s hodnotami x), parametr číslo definuje číslo řádku (resp. sloupce podle toho, s jakou oblastí pracujeme). Vzorec =INDEX(data!B:B;223) tedy podle předcházejícího obrázku vrátí hodnotu 14, Výsledný vzorec, který musíme vložit do buňky s hledaným doletem, dostaneme tedy vložením funkce POZVYHLEDAT na místo parametru funkce INDEX podle obrázku: Poznámka: Funkce POZVYHLEDAT se v původní verzi Excelu nazývá MATCH, což je evidentně výstižnější název snaha o počeštění je zde značně kontraproduktivní. Nyní si můžeme změnou parametrů snadno ověřit, že hmotnější těleso doletí vlivem větší setrvačnosti do větší vzdálenosti, také elevační úhel pro maximální dolet již není 45 stupňů a závisí na mnoha faktorech.

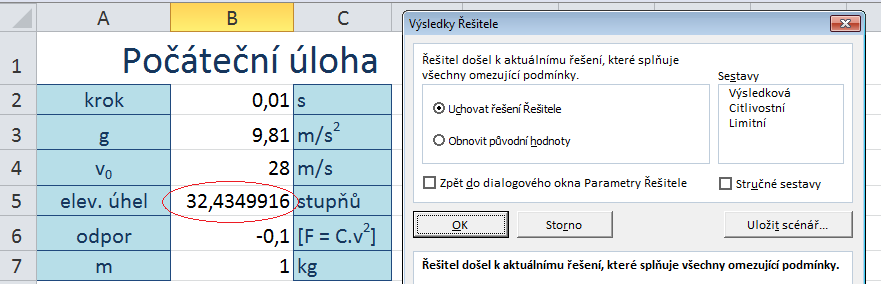
10 Pro vyhledání optimálního elevačního úhlu pro maximální dolet při dané počáteční rychlosti můžeme využít nástroj Řešitel, popsaný v předcházejícím příkladu: Vzhledem k tomu, že od hodnoty počátečního úhlu k hodnotě doletu existují tisíce provázaných vzorců, nemusí řešitel nalézt hledaný optimální úhel. Ve formuláři Řešitele pak lze u metody (GRG nonlinear) pomocí tlačítka Možnosti zadat přesnější hodnoty konvergence a vyžadovat vyzkoušení většího počtu počátečních podmínek: Nalezené řešení bychom vždy měli ověřit jinou úvahou,
11
3. Optimalizace pomocí nástroje Řešitel
 3. Optimalizace pomocí nástroje Řešitel Rovnováha mechanické soustavy Uvažujme dvě různé nehmotné lineární pružiny P 1 a P 2 připevněné na pevné horizontální tyči splývající s osou x podle obrázku: (0,0)
3. Optimalizace pomocí nástroje Řešitel Rovnováha mechanické soustavy Uvažujme dvě různé nehmotné lineární pružiny P 1 a P 2 připevněné na pevné horizontální tyči splývající s osou x podle obrázku: (0,0)
2. Numerické výpočty. 1. Numerická derivace funkce
 2. Numerické výpočty Excel je poměrně pohodlný nástroj na provádění různých numerických výpočtů. V příkladu si ukážeme možnosti výpočtu a zobrazení diferenciálních charakteristik analytické funkce, přičemž
2. Numerické výpočty Excel je poměrně pohodlný nástroj na provádění různých numerických výpočtů. V příkladu si ukážeme možnosti výpočtu a zobrazení diferenciálních charakteristik analytické funkce, přičemž
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
1. Průběh funkce. 1. Nejjednodušší řešení
 1. Průběh funkce K zobrazení průběhu analytické funkce jedné proměnné potřebujeme sloupec dat nezávisle proměnné x (argumentu) a sloupec dat s funkcí argumentu y = f(x) vytvořený obvykle pomocí vzorce.
1. Průběh funkce K zobrazení průběhu analytické funkce jedné proměnné potřebujeme sloupec dat nezávisle proměnné x (argumentu) a sloupec dat s funkcí argumentu y = f(x) vytvořený obvykle pomocí vzorce.
4. Práce, výkon, energie a vrhy
 4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
4. Práce, výkon, energie a vrhy 4. Práce Těleso koná práci, jestliže působí silou na jiné těleso a posune jej po určité dráze ve směru síly. Příklad: traktor táhne přívěs, jeřáb zvedá panel Kdy se práce
Excel 2007 praktická práce
 Excel 2007 praktická práce 1 Excel OP LZZ Tento kurz je financován prostřednictvím výzvy č. 40 Operačního programu Lidské zdroje a zaměstnanost z prostředků Evropského sociálního fondu. 2 Excel Cíl kurzu
Excel 2007 praktická práce 1 Excel OP LZZ Tento kurz je financován prostřednictvím výzvy č. 40 Operačního programu Lidské zdroje a zaměstnanost z prostředků Evropského sociálního fondu. 2 Excel Cíl kurzu
Příklad 1. Řešení 1a. Řešení 1b ŘEŠENÉ PŘÍKLADY Z M1B ČÁST 5
 Příklad 1 Najděte totální diferenciál d (h) pro h=(h,h ) v příslušných bodech pro následující funkce: a) (,)= cos, =1; b) (,)=ln( + ), =2; 0 c) (,)=arctg(), =1; 0 1 d) (,)= +, =1; 1 Řešení 1a Máme nalézt
Příklad 1 Najděte totální diferenciál d (h) pro h=(h,h ) v příslušných bodech pro následující funkce: a) (,)= cos, =1; b) (,)=ln( + ), =2; 0 c) (,)=arctg(), =1; 0 1 d) (,)= +, =1; 1 Řešení 1a Máme nalézt
b) Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0
 Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0") Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Fyzikální vzdělávání. 1. ročník. Učební obor: Kuchař číšník Kadeřník. Implementace ICT do výuky č. CZ.1.07/1.1.02/ GG OP VK
 Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
KOMPLEXNÍ ČÍSLA INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
 KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
Obr. P1.1 Zadání úlohy v MS Excel
 Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel. Výpočet budeme demonstrovat
Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel. Výpočet budeme demonstrovat
Mechanika - kinematika
 Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
Mechanika - kinematika Hlavní body Úvod do mechaniky, kinematika hmotného bodu Pohyb přímočarý rovnoměrný rovnoměrně zrychlený. Pohyb křivočarý. Pohyb po kružnici rovnoměrný rovnoměrně zrychlený Pohyb
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.
![[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.](/thumbs/54/34794266.jpg "[GRAVITAČNÍ POLE] Gravitace Gravitace je všeobecná vlastnost těles.") 5. GRAVITAČNÍ POLE 5.1. NEWTONŮV GRAVITAČNÍ ZÁKON Gravitace Gravitace je všeobecná vlastnost těles. Newtonův gravitační zákon Znění: Dva hmotné body se navzájem přitahují stejně velkými gravitačními silami
5. GRAVITAČNÍ POLE 5.1. NEWTONŮV GRAVITAČNÍ ZÁKON Gravitace Gravitace je všeobecná vlastnost těles. Newtonův gravitační zákon Znění: Dva hmotné body se navzájem přitahují stejně velkými gravitačními silami
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Excel tabulkový procesor
 Pozice aktivní buňky Excel tabulkový procesor Označená aktivní buňka Řádek vzorců zobrazuje úplný a skutečný obsah buňky Typ buňky řetězec, číslo, vzorec, datum Oprava obsahu buňky F2 nebo v řádku vzorců,
Pozice aktivní buňky Excel tabulkový procesor Označená aktivní buňka Řádek vzorců zobrazuje úplný a skutečný obsah buňky Typ buňky řetězec, číslo, vzorec, datum Oprava obsahu buňky F2 nebo v řádku vzorců,
Microsoft Office. Excel vyhledávací funkce
 Microsoft Office Excel vyhledávací funkce Karel Dvořák 2011 Vyhledávání v tabulkách Vzhledem ke skutečnosti, že Excel je na mnoha pracovištích používán i jako nástroj pro správu jednoduchých databází,
Microsoft Office Excel vyhledávací funkce Karel Dvořák 2011 Vyhledávání v tabulkách Vzhledem ke skutečnosti, že Excel je na mnoha pracovištích používán i jako nástroj pro správu jednoduchých databází,
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
, = , = , = , = Pokud primitivní funkci pro proměnnou nevidíme, pomůžeme si v tuto chvíli jednoduchou substitucí = +2 +1, =2 1 = 1 2 1
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST 7 Příklad 1 a) Vypočtěte hmotnost oblasti ohraničené přímkami =1,=3,=1,= jestliže její hustota je dána funkcí 1,= ++1 b) Vypočtěte statický moment čtverce ohraničeného přímkami
ŘEŠENÉ PŘÍKLADY Z MB ČÁST 7 Příklad 1 a) Vypočtěte hmotnost oblasti ohraničené přímkami =1,=3,=1,= jestliže její hustota je dána funkcí 1,= ++1 b) Vypočtěte statický moment čtverce ohraničeného přímkami
Přílohy. Příloha 1. Obr. P1.1 Zadání úlohy v MS Excel
 Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel 2007. Výpočet budeme demonstrovat
Přílohy Příloha 1 Řešení úlohy lineárního programování v MS Excel V této příloze si ukážeme, jak lze řešit úlohy lineárního programování pomocí tabulkového procesoru MS Excel 2007. Výpočet budeme demonstrovat
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
R2.213 Tíhová síla působící na tělesa je mnohem větší než gravitační síla vzájemného přitahování těles.
 2.4 Gravitační pole R2.211 m 1 = m 2 = 10 g = 0,01 kg, r = 10 cm = 0,1 m, = 6,67 10 11 N m 2 kg 2 ; F g =? R2.212 F g = 4 mn = 0,004 N, a) r 1 = 2r; F g1 =?, b) r 2 = r/2; F g2 =?, c) r 3 = r/3; F g3 =?
2.4 Gravitační pole R2.211 m 1 = m 2 = 10 g = 0,01 kg, r = 10 cm = 0,1 m, = 6,67 10 11 N m 2 kg 2 ; F g =? R2.212 F g = 4 mn = 0,004 N, a) r 1 = 2r; F g1 =?, b) r 2 = r/2; F g2 =?, c) r 3 = r/3; F g3 =?
Pohyb tělesa (5. část)
") Pohyb tělesa (5. část) A) Co už víme o pohybu tělesa?: Pohyb tělesa se definuje jako změna jeho polohy vzhledem k jinému tělesu. O pohybu tělesa má smysl hovořit jedině v souvislosti s polohou jiných těles.
Pohyb tělesa (5. část) A) Co už víme o pohybu tělesa?: Pohyb tělesa se definuje jako změna jeho polohy vzhledem k jinému tělesu. O pohybu tělesa má smysl hovořit jedině v souvislosti s polohou jiných těles.
Dynamika. Dynamis = řecké slovo síla
 Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole
 Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
Fyzika 1 - rámcové příklady Kinematika a dynamika hmotného bodu, gravitační pole 1. Určete skalární a vektorový součin dvou obecných vektorů AA a BB a popište, jak závisí výsledky těchto součinů na úhlu
Poznámka. V některých literaturách se pro označení vektoru také používá symbolu u.
 Vektory, operace s vektory Ž3 Orientovaná úsečka Mějme dvojici bodů, (na přímce, v rovině nebo prostoru), které spojíme a vznikne tak úsečka. Pokud budeme rozlišovat, zda je spojíme od k nebo od k, říkáme,
Vektory, operace s vektory Ž3 Orientovaná úsečka Mějme dvojici bodů, (na přímce, v rovině nebo prostoru), které spojíme a vznikne tak úsečka. Pokud budeme rozlišovat, zda je spojíme od k nebo od k, říkáme,
e-mail: RadkaZahradnikova@seznam.cz 1. července 2010
 Optimální výrobní program Radka Zahradníková e-mail: RadkaZahradnikova@seznam.cz 1. července 2010 Obsah 1 Lineární programování 2 Simplexová metoda 3 Grafická metoda 4 Optimální výrobní program Řešení
Optimální výrobní program Radka Zahradníková e-mail: RadkaZahradnikova@seznam.cz 1. července 2010 Obsah 1 Lineární programování 2 Simplexová metoda 3 Grafická metoda 4 Optimální výrobní program Řešení
Excel - pokračování. Př. Porovnání cestovních kanceláří ohraničení tabulky, úprava šířky sloupců, sestrojení grafu
 Excel - pokračování Př. Porovnání cestovních kanceláří ohraničení tabulky, úprava šířky sloupců, sestrojení grafu Př. Analýza prodeje CD základní jednoduché vzorce karta Domů Př. Skoky do dálky - funkce
Excel - pokračování Př. Porovnání cestovních kanceláří ohraničení tabulky, úprava šířky sloupců, sestrojení grafu Př. Analýza prodeje CD základní jednoduché vzorce karta Domů Př. Skoky do dálky - funkce
Projekt OPVK - CZ.1.07/1.1.00/ Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: Kvadratická funkce Autor: Kubešová
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: Kvadratická funkce Autor: Kubešová
EXCELentní tipy a triky pro mírně pokročilé. Martina Litschmannová
 EXCELentní tipy a triky pro mírně pokročilé Martina Litschmannová Obsah semináře definování názvu dynamicky měněné oblasti, kontingenční tabulky úvod, kontingenční tabulky násobné oblasti sloučení, převod
EXCELentní tipy a triky pro mírně pokročilé Martina Litschmannová Obsah semináře definování názvu dynamicky měněné oblasti, kontingenční tabulky úvod, kontingenční tabulky násobné oblasti sloučení, převod
Vytvoření uživatelské šablony
 Inženýrsky manuál č. 40 Aktualizováno: 11/2018 Vytvoření uživatelské šablony Program: Stratigrafie - Dokumentace Soubor: Demo_manual_40.gsg Cílem tohoto inženýrského manuálu je ukázat vytvoření vlastní
Inženýrsky manuál č. 40 Aktualizováno: 11/2018 Vytvoření uživatelské šablony Program: Stratigrafie - Dokumentace Soubor: Demo_manual_40.gsg Cílem tohoto inženýrského manuálu je ukázat vytvoření vlastní
pracovní list studenta
 Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
Výstup RVP: Klíčová slova: pracovní list studenta Funkce kvadratická funkce Mirek Kubera žák načrtne grafy požadovaných funkcí, formuluje a zdůvodňuje vlastnosti studovaných funkcí, modeluje závislosti
František Hudek. červen 2012
 VY_32_INOVACE_FH09 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek červen 2012 8. ročník
VY_32_INOVACE_FH09 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek červen 2012 8. ročník
Rychlost, zrychlení, tíhové zrychlení
 Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE
 KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE Slovo kvadrát vzniklo z latinského slova quadratus které znamená: čtyřhranný, čtvercový. Obsah čtverce se vypočítá, jako druhá mocnina délky
KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE Slovo kvadrát vzniklo z latinského slova quadratus které znamená: čtyřhranný, čtvercový. Obsah čtverce se vypočítá, jako druhá mocnina délky
676 + 4 + 100 + 196 + 0 + 484 + 196 + 324 + 64 + 324 = = 2368
 Příklad 1 Je třeba prověřit, zda lze na 5% hladině významnosti pokládat za prokázanou hypotézu, že střední doba výroby výlisku je 30 sekund. Přitom 10 náhodně vybraných výlisků bylo vyráběno celkem 540
Příklad 1 Je třeba prověřit, zda lze na 5% hladině významnosti pokládat za prokázanou hypotézu, že střední doba výroby výlisku je 30 sekund. Přitom 10 náhodně vybraných výlisků bylo vyráběno celkem 540
7. Gravitační pole a pohyb těles v něm
 7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
Časové řady - Cvičení
 Časové řady - Cvičení Příklad 2: Zobrazte měsíční časovou řadu míry nezaměstnanosti v obci Rybitví za roky 2005-2010. Příslušná data naleznete v souboru cas_rada.xlsx. Řešení: 1. Pro transformaci dat do
Časové řady - Cvičení Příklad 2: Zobrazte měsíční časovou řadu míry nezaměstnanosti v obci Rybitví za roky 2005-2010. Příslušná data naleznete v souboru cas_rada.xlsx. Řešení: 1. Pro transformaci dat do
Níže uvedená tabulka obsahuje technické údaje a omezení aplikace Excel (viz také článek Technické údaje a omezení aplikace Excel (2007).
.") Níže uvedená tabulka obsahuje technické údaje a omezení aplikace - (viz také článek Technické údaje a omezení aplikace Excel (). otevřených sešitů a systémovými prostředky a systémovými prostředky a systémovými
Níže uvedená tabulka obsahuje technické údaje a omezení aplikace - (viz také článek Technické údaje a omezení aplikace Excel (). otevřených sešitů a systémovými prostředky a systémovými prostředky a systémovými
Popisná statistika. Komentované řešení pomocí MS Excel
 Popisná statistika Komentované řešení pomocí MS Excel Vstupní data Máme k dispozici data o počtech bodů z 1. a 2. zápočtového testu z Matematiky I v zimním semestru 2015/2016 a to za všech 762 studentů,
Popisná statistika Komentované řešení pomocí MS Excel Vstupní data Máme k dispozici data o počtech bodů z 1. a 2. zápočtového testu z Matematiky I v zimním semestru 2015/2016 a to za všech 762 studentů,
4.2.15 Funkce kotangens
 4..5 Funkce kotangens Předpoklady: 44 Pedagogická poznámka: Pokud nemáte čas, doporučuji nechat tuto hodinu studentům na domácí práci. Nedá se na tom nic zkazit a v budoucnu to není nikde příliš potřeba.
4..5 Funkce kotangens Předpoklady: 44 Pedagogická poznámka: Pokud nemáte čas, doporučuji nechat tuto hodinu studentům na domácí práci. Nedá se na tom nic zkazit a v budoucnu to není nikde příliš potřeba.
( + ) ( ) f x x f x. x bude zmenšovat nekonečně přesný. = derivace funkce f v bodě x. nazýváme ji derivací funkce f v bodě x. - náš základní zápis
 ( ) f x x f x. x bude zmenšovat nekonečně přesný. = derivace funkce f v bodě x. nazýváme ji derivací funkce f v bodě x. - náš základní zápis") 1.. Derivace elementárních funkcí I Předpoklad: 1 Shrnutí z minulé hodin: Chceme znát jakým způsobem se mění hodnot funkce f ( f ( + f ( přibližná hodnota změn = přesnost výpočtu se bude zvětšovat, kdž
1.. Derivace elementárních funkcí I Předpoklad: 1 Shrnutí z minulé hodin: Chceme znát jakým způsobem se mění hodnot funkce f ( f ( + f ( přibližná hodnota změn = přesnost výpočtu se bude zvětšovat, kdž
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ TĚŽIŠTĚ
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Příklad 5.3. v 1. u 1 u 2. v 2
 Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
příkladů do cvičení. V textu se objeví i pár detailů, které jsem nestihl (na které jsem zapomněl) a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.
 a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.") Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Relativní a absolutní adresa buňky, pojmenování buňky/rozsahu
 Relativní a absolutní adresa buňky, pojmenování buňky/rozsahu EU peníze středním školám Didaktický učební materiál Anotace Označení DUMU: VY_32_INOVACE_IT4.12 Předmět: IVT Tematická oblast: Microsoft Office
Relativní a absolutní adresa buňky, pojmenování buňky/rozsahu EU peníze středním školám Didaktický učební materiál Anotace Označení DUMU: VY_32_INOVACE_IT4.12 Předmět: IVT Tematická oblast: Microsoft Office
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
František Hudek. květen 2012
 VY_32_INOVACE_FH07 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek květen 2012 8. ročník
VY_32_INOVACE_FH07 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek květen 2012 8. ročník
Pohyby HB v některých význačných silových polích
 Pohyby HB v některých význačných silových polích Pohyby HB Gravitační pole Gravitační pole v blízkém okolí Země tíhové pole Pohyb v gravitačním silovém poli Keplerova úloha (podrobné řešení na semináři)
Pohyby HB v některých význačných silových polích Pohyby HB Gravitační pole Gravitační pole v blízkém okolí Země tíhové pole Pohyb v gravitačním silovém poli Keplerova úloha (podrobné řešení na semináři)
37. PARABOLA V ANALYTICKÉ GEOMETRII
 37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
Funkce a lineární funkce pro studijní obory
 Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
3. kapitola. Průběhy vnitřních sil na lomeném nosníku. Janek Faltýnek SI J (43) Teoretická část: Příkladová část: Stavební mechanika 2
 Teoretická část: Příkladová část: Stavební mechanika 2") 3. kapitola Stavební mechanika Janek Faltýnek SI J (43) Průběhy vnitřních sil na lomeném nosníku Teoretická část: Naším úkolem je v tomto příkladu vyšetřit průběh vnitřních sil na lomeném rovinném nosníku
3. kapitola Stavební mechanika Janek Faltýnek SI J (43) Průběhy vnitřních sil na lomeném nosníku Teoretická část: Naším úkolem je v tomto příkladu vyšetřit průběh vnitřních sil na lomeném rovinném nosníku
4EK213 LINEÁRNÍ MODELY
 4EK213 LINEÁRNÍ MODELY Úterý 11:00 12:30 hod. učebna SB 324 3. přednáška SIMPLEXOVÁ METODA I. OSNOVA PŘEDNÁŠKY Standardní tvar MM Základní věta LP Princip simplexové metody Výchozí řešení SM Zlepšení řešení
4EK213 LINEÁRNÍ MODELY Úterý 11:00 12:30 hod. učebna SB 324 3. přednáška SIMPLEXOVÁ METODA I. OSNOVA PŘEDNÁŠKY Standardní tvar MM Základní věta LP Princip simplexové metody Výchozí řešení SM Zlepšení řešení
fakulty MENDELU v Brně (LDF) s ohledem na disciplíny společného základu http://akademie.ldf.mendelu.cz/cz (reg. č. CZ.1.07/2.2.00/28.
 s ohledem na disciplíny společného základu http://akademie.ldf.mendelu.cz/cz (reg. č. CZ.1.07/2.2.00/28.") Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
František Hudek. srpen 2012
 VY_32_INOVACE_FH17 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek srpen 2012 8. ročník
VY_32_INOVACE_FH17 Jméno autora výukového materiálu Datum (období), ve kterém byl VM vytvořen Ročník, pro který je VM určen Vzdělávací oblast, obor, okruh, téma Anotace František Hudek srpen 2012 8. ročník
Počty testových úloh
 Počty testových úloh Tematický celek rok 2009 rok 2011 CELKEM Skalární a vektorové veličiny 4 lehké 4 těžké (celkem 8) 4 lehké 2 těžké (celkem 6) 8 lehkých 6 těžkých (celkem 14) Kinematika částice 6 lehkých
Počty testových úloh Tematický celek rok 2009 rok 2011 CELKEM Skalární a vektorové veličiny 4 lehké 4 těžké (celkem 8) 4 lehké 2 těžké (celkem 6) 8 lehkých 6 těžkých (celkem 14) Kinematika částice 6 lehkých
Nápověda ke cvičení 5
 Nápověda ke cvičení 5 Formát datum: vyznačíme buňky pravé tlačítko myši Formát buněk Číslo Druh Datum Typ: vybereme typ *14. březen 2001 Do tabulky pak zapíšeme datum bez mezer takto: 1.9.2014 Enter OK
Nápověda ke cvičení 5 Formát datum: vyznačíme buňky pravé tlačítko myši Formát buněk Číslo Druh Datum Typ: vybereme typ *14. březen 2001 Do tabulky pak zapíšeme datum bez mezer takto: 1.9.2014 Enter OK
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D.
 Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D. Ze zadaných třinácti příkladů vypracuje každý posluchač samostatně
Zadání programu z předmětu Dynamika I pro posluchače kombinovaného studia v Ostravě a Uherském Brodu vyučuje Ing. Zdeněk Poruba, Ph.D. Ze zadaných třinácti příkladů vypracuje každý posluchač samostatně
Základní vzorce a funkce v tabulkovém procesoru
 Základní vzorce a funkce v tabulkovém procesoru Na tabulkovém programu je asi nejzajímavější práce se vzorci a funkcemi. Když jednou nastavíte, jak se mají dané údaje zpracovávat (některé buňky sečíst,
Základní vzorce a funkce v tabulkovém procesoru Na tabulkovém programu je asi nejzajímavější práce se vzorci a funkcemi. Když jednou nastavíte, jak se mají dané údaje zpracovávat (některé buňky sečíst,
Parametrické rovnice křivky
 Křivkový integrál Robert Mařík jaro 2014 Tento text je tištěnou verzí prezentací dostupných z http://user.mendelu.cz/marik/am. Křivkový integrál Jedná se o rozšíření Riemannova integrálu, kdy množinou
Křivkový integrál Robert Mařík jaro 2014 Tento text je tištěnou verzí prezentací dostupných z http://user.mendelu.cz/marik/am. Křivkový integrál Jedná se o rozšíření Riemannova integrálu, kdy množinou
Lingebraické kapitolky - Analytická geometrie
 Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
Lingebraické kapitolky - Analytická geometrie Jaroslav Horáček KAM MFF UK 2013 Co je to vektor? Šipička na tabuli? Ehm? Množina orientovaných úseček majících stejný směr. Prvek vektorového prostoru. V
3 Mechanická energie 5 3.1 Kinetická energie... 6 3.3 Potenciální energie... 6. 3.4 Zákon zachování mechanické energie... 9
 Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
Obsah 1 Mechanická práce 1 2 Výkon, příkon, účinnost 2 3 Mechanická energie 5 3.1 Kinetická energie......................... 6 3.2 Potenciální energie........................ 6 3.3 Potenciální energie........................
Digitální učební materiál. III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Příjemce podpory Gymnázium, Jevíčko, A. K.
 Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
Digitální učební materiál Číslo projektu CZ.1.07/1.5.00/34.0802 Název projektu Zkvalitnění výuky prostřednictvím ICT Číslo a název šablony klíčové aktivity III/2 Inovace a zkvalitnění výuky prostřednictvím
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII
 PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
Veletrh nápadů učitelů fyziky. Gravitační katapult
 Gravitační katapult Jiří Bartoš (bartos@physics.muni.cz), Pavel Konečný Ústav teoretické fyziky a astrofyziky, Katedra obecné fyziky Přírodovědecká fakulta Masarykovy univerzity v Brně. Katapulty různé
Gravitační katapult Jiří Bartoš (bartos@physics.muni.cz), Pavel Konečný Ústav teoretické fyziky a astrofyziky, Katedra obecné fyziky Přírodovědecká fakulta Masarykovy univerzity v Brně. Katapulty různé
Pohyb tělesa po nakloněné rovině
 Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
ANALYTICKÁ GEOMETRIE V ROVINĚ
 ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti
 Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
LDF MENDELU. Simona Fišnarová (MENDELU) Základy lineárního programování VMAT, IMT 1 / 25
 Základy lineárního programování VMAT, IMT 1 / 25") Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_03_IVT_MSOFFICE_02_Excel
 Číslo projektu Název školy Název Materiálu Autor Tematický okruh Ročník CZ.1.07/1.5.00/34.0499 Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_03_IVT_MSOFFICE_02_Excel Ing. Pavel BOHANES
Číslo projektu Název školy Název Materiálu Autor Tematický okruh Ročník CZ.1.07/1.5.00/34.0499 Soukromá střední odborná škola Frýdek-Místek, s.r.o. VY_32_INOVACE_03_IVT_MSOFFICE_02_Excel Ing. Pavel BOHANES
Vyhledávací a databázové funkce v MS Excel 2007. Martin Tůma
 1 Úvod Vyhledávací a databázové funkce v MS Excel 2007 Martin Tůma Cílem této seminární práce je stručně vysvětlit princip a syntaxi vyhledávacích a databázových funkcí v aplikaci MS Excel 2007 a na praktických
1 Úvod Vyhledávací a databázové funkce v MS Excel 2007 Martin Tůma Cílem této seminární práce je stručně vysvětlit princip a syntaxi vyhledávacích a databázových funkcí v aplikaci MS Excel 2007 a na praktických
Parametrická rovnice přímky v rovině
 Parametrická rovnice přímky v rovině Nechť je v kartézské soustavě souřadnic dána přímka AB. Nechť vektor u = B - A. Pak libovolný bod X[x; y] leží na přímce AB právě tehdy, když vektory u a X - A jsou
Parametrická rovnice přímky v rovině Nechť je v kartézské soustavě souřadnic dána přímka AB. Nechť vektor u = B - A. Pak libovolný bod X[x; y] leží na přímce AB právě tehdy, když vektory u a X - A jsou
kontakt: Excel Asistent Magazín 06/2003 - pojmenované oblasti a funkce Jiří Číhař jiricihar@dataspectrum.cz
 popis: autor: kontakt: domovská stránka: Excel Asistent Magazín 06/2003 - pojmenované oblasti a funkce Jiří Číhař jiricihar@dataspectrum.cz www.dataspectrum.cz Přehled mzdy 1. Vytvořit názvy potřebné pro
popis: autor: kontakt: domovská stránka: Excel Asistent Magazín 06/2003 - pojmenované oblasti a funkce Jiří Číhař jiricihar@dataspectrum.cz www.dataspectrum.cz Přehled mzdy 1. Vytvořit názvy potřebné pro
Registrační číslo projektu: CZ.1.07/1.5.00/34.0185. Název projektu: Moderní škola 21. století. Zařazení materiálu: Ověření materiálu ve výuce:
 STŘEDNÍ ODBORNÁ ŠKOLA A STŘEDNÍ ODBORNÉ UČILIŠTĚ NERATOVICE Školní 664, 277 11 Neratovice, tel.: 315 682 314, IČO: 683 834 95, IZO: 110 450 639 Ředitelství školy: Spojovací 632, 277 11 Neratovice tel.:
STŘEDNÍ ODBORNÁ ŠKOLA A STŘEDNÍ ODBORNÉ UČILIŠTĚ NERATOVICE Školní 664, 277 11 Neratovice, tel.: 315 682 314, IČO: 683 834 95, IZO: 110 450 639 Ředitelství školy: Spojovací 632, 277 11 Neratovice tel.:
MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]
![MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]](/thumbs/58/41721403.jpg "MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]") MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
úloh pro ODR jednokrokové metody
 Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
6 Samodružné body a směry afinity
 6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
M - Kvadratické rovnice a kvadratické nerovnice
 M - Kvadratické rovnice a kvadratické nerovnice Určeno jako učební tet pro studenty dálkového studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem - EduBase.
M - Kvadratické rovnice a kvadratické nerovnice Určeno jako učební tet pro studenty dálkového studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem - EduBase.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Funkce tangens. cotgα = = Předpoklady: B a. A Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá b přilehlá
 4..4 Funkce tangens Předpoklady: 40 c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro
4..4 Funkce tangens Předpoklady: 40 c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro
6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
6 6 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Pohyblivost mechanické soustavy charakterizujeme počtem stupňů volnosti. Je to číslo, které udává, kolika nezávislými parametry je určena poloha jednotlivých členů soustavy
Microsoft Excel kopírování vzorců, adresování, podmíněný formát. Mgr. Jan Veverka Střední odborná škola sociální Evangelická akademie
 Microsoft Excel kopírování vzorců, adresování, podmíněný formát Mgr. Jan Veverka Střední odborná škola sociální Evangelická akademie Kopírování vzorců v mnoha případech je třeba provést stejný výpočet
Microsoft Excel kopírování vzorců, adresování, podmíněný formát Mgr. Jan Veverka Střední odborná škola sociální Evangelická akademie Kopírování vzorců v mnoha případech je třeba provést stejný výpočet
3 Lineární kombinace vektorů. Lineární závislost a nezávislost
 3 Lineární kombinace vektorů. Lineární závislost a nezávislost vektorů. Obrázek 5: Vektor w je lineární kombinací vektorů u a v. Vektory u, v a w jsou lineárně závislé. Obrázek 6: Vektor q je lineární
3 Lineární kombinace vektorů. Lineární závislost a nezávislost vektorů. Obrázek 5: Vektor w je lineární kombinací vektorů u a v. Vektory u, v a w jsou lineárně závislé. Obrázek 6: Vektor q je lineární
Nerovnice a nerovnice v součinovém nebo v podílovém tvaru
 Variace 1 Nerovnice a nerovnice v součinovém nebo v podílovém tvaru Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz
Variace 1 Nerovnice a nerovnice v součinovém nebo v podílovém tvaru Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz
Řešení úloh 1. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů. = 30 s.
 Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Řešení úloh. kola 60. ročníku fyzikální olympiády. Kategorie D Autor úloh: J. Jírů.a) Doba jízdy na prvním úseku (v 5 m s ): t v a 30 s. Konečná rychlost jízdy druhého úseku je v v + a t 3 m s. Pro rovnoměrně
Funkce pro studijní obory
 Variace 1 Funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce Funkce je přiřazení,
Variace 1 Funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce Funkce je přiřazení,
Matematika (CŽV Kadaň) aneb Úvod do lineární algebry Matice a soustavy rovnic
 aneb Úvod do lineární algebry Matice a soustavy rovnic") Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
a vlastních vektorů Příklad: Stanovte taková čísla λ, pro která má homogenní soustava Av = λv nenulové (A λ i I) v = 0.
 v = 0.") Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Jednotky zrychlení odvodíme z výše uvedeného vztahu tak, že dosadíme za jednotlivé veličiny.
 1. Auto zrychlí rovnoměrně zrychleným pohybem z 0 km h -1 na 72 km h -1 za 10 sekund. 2. Auto zastaví z rychlosti 64,8 km h -1 rovnoměrně zrychleným (zpomaleným) pohybem za 9 sekund. V obou případech nakreslete
1. Auto zrychlí rovnoměrně zrychleným pohybem z 0 km h -1 na 72 km h -1 za 10 sekund. 2. Auto zastaví z rychlosti 64,8 km h -1 rovnoměrně zrychleným (zpomaleným) pohybem za 9 sekund. V obou případech nakreslete
1 Tuhé těleso a jeho pohyb
 1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,