Příklady k přednášce 20 - Číslicové řízení
|
|
|
- Stanislava Křížová
- před 6 lety
- Počet zobrazení:
Transkript

1 Příklady k přednášce 0 - Čílicové řízení Micael Šebek Automatické řízení 07-4-
2 Vzorkování: vzta mezi a z pro komplexní póly Spojitý ignál má Laplaceův obraz póly v, Dikrétní ignál má z-obraz αt yt ( ) = e in βtt, > 0 β y () = ( + α) + β = α ± jβ αk y( k) = e in( βk) póly α α z e in( β) ze in( β) yz ( ) = = z e co( β) + z e z ze co( β) + e α α α α ( ) ( β β ) z, = e co( ) ± jin( ) = e α α ± jβ Mezi póly obrazu pojitéo a (vzorkovanéo) dikrétnío ignálu platí vzta z, = e, Micael Šebek Pr-ARI-0-03
3 Strobokopický efekt Signály frekvencemi od 0 do π/ e po vzorkování zobrazí do jednotkovéo kruu. Kam e zobrazí ignály většími frekvencemi? Uvažme inuovku L-obrazem majícím póly ω yt ( ) = inωt y () =, = ± jω + ω Vzorkováním periodou zinω y( k) = in( ωk) yz ( ) = j z z zcoω+, = e ± ω Pro případ ω > π > πω neboli v Hz ω je a dikrétní póly mají úel > 80 f = Hz, f = < f π ω > π Při ω > π jω j( π ω) jω j( π ω) je e e, e e, kde ( π ω ) 0,80 A poloa pólů odpovídá i frekvenci ( ω= π ω) ω = π ω = ω ω = = [ ] Micael Šebek Pr-ARI
 ω = 3π π ω = π ω = vzorkování z = e z Micael Šebek Pr-ARI-0-03")
4 Strobokopický efekt ω ω ω = π ω π ω = vzorkování z = e z π ω = Při zpětném zobrazení (rekontrukci ignálu) nepoznáme právné frekvenční pámo Abycom tomu zabránili, muíme vzorkovat utěji Nebo předem odfiltrovat ze pojitéo ignálu frekvence vyšší než ωn = ω (anti-aliaing filter) ω = 3π π ω = π ω = vzorkování z = e z Micael Šebek Pr-ARI
 podrobněji ÅW, 3, ex.")
 = cíl: ledovat topu (čím přeněji, tím")


5 Rameno v dikové mecanice zjednodušeno (normalizováno na ) podrobněji ÅW, 3, ex. přeno napětí zeilovače na polou ramene G () = cíl: ledovat topu (čím přeněji, tím užší) přené řízení poloy ramene důležitá dynamika ryclot čtení truktura řízení u () C u () y () regulátor zeilovač Příklad: Diková jednotka rameno Micael Šebek ARI-Pr
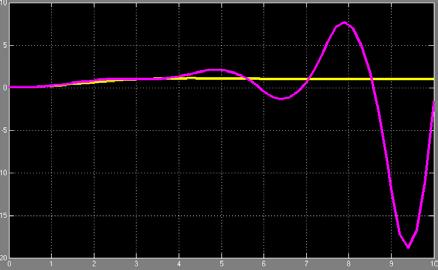
 = uc () y () + CL carakteritický polynom ( )( ) c () CL = + + +,3 CL přeno + y () = u() + + + C ( )( ) imulace AW.mdl doba utálení na 5% je 5.")
 >> T=b*r/c T = 0.5000(+) / u () C t (+.0000)(^+.0000+.0000) >> yt () >> pbar=+;qbar=*+;rbar=/; >> cbar=a*pbar+b*qbar cbar = ut () (+.0000)(^+.0000+.0000) >> Tbar=b*rbar*pbar/cbar Tbar = 0.")
6 Příklad: pojité řízení pojitý regulátor (navrneme pojitými metodami ) u () = uc () y () + CL carakteritický polynom ( )( ) c () CL = + + +,3 CL přeno + y () = u() C ( )( ) imulace AW.mdl doba utálení na 5% je 5.5, překmit do 0% - OK Jak realizovat digitálně? ARI_0 AW.mdl >> a=^; b=;p=+;q=*+;r=.5*+; >> c=a*p+b*q c = + + ^ + ^3 >> pformat rootr >> c=a*p+b*q c = (+.0000)(^ ) >> T=b*r/c T = (+) / u () C t (+.0000)(^ ) >> yt () >> pbar=+;qbar=*+;rbar=/; >> cbar=a*pbar+b*qbar cbar = ut () (+.0000)(^ ) >> Tbar=b*rbar*pbar/cbar Tbar = (+) / (+.0000)(^ ) Micael Šebek ARI-Pr = 3 = ± j
7 Spojitý regulátor vyjádříme Příklad: Naivní aproximace regulátoru u () = 0.5 uc() y () = 0.5 uc() y () + y () + + = [ 0.5 uc ( ) y ( ) + x ( )].5 kde x () = y () + dotaneme v čaové oblati pojitý algoritmu (zákon řízení) [ ] ut () = 0.5 u () t yt () + xt () C dx xt ( ).5 yt ( ) dt = + dikrétní algoritmu - ignály vzorkujeme periodou a derivaci aproximujeme diferencí = + + xt ( + ) xt () = xt ( ) +.5 yt ( ) Micael Šebek ARI-Pr
![Příklad Naivní návr Tak dotaneme dikrétní aproximaci [ ] [ ] xt ( + ) = xt ( ) +.5 yt ( ) xt ( ) k k k k ut ( ) 0.5 u ( t) yt ( ) xt ( ) = + ut () = 0.](/docs-images/93/111384074/images/8-1.jpg "5 [ u () t yt () + xt ()] k C k k k dx = xt ( ) +.5 yt ( ) dt Tu můžeme realizovat programem (kde u C je dáno digitálně) C y:= adin(in) {čti odnotu proceu} u:= *(0.")
8 Příklad Naivní návr Tak dotaneme dikrétní aproximaci [ ] [ ] xt ( + ) = xt ( ) +.5 yt ( ) xt ( ) k k k k ut ( ) 0.5 u ( t) yt ( ) xt ( ) = + ut () = 0.5 [ u () t yt () + xt ()] k C k k k dx = xt ( ) +.5 yt ( ) dt Tu můžeme realizovat programem (kde u C je dáno digitálně) C y:= adin(in) {čti odnotu proceu} u:= *(0.5*uc-y+x) {vypočti řídicí odnotu} dout(u) {pošli ven řídicí odnotu} x:= x+(.5*y-*x) {vypočti novou odnotu x} algoritmu nebo dikrétním přenoem z+ 0.5 uz ( ) = 0.5 uc ( z) yz ( ) z+ [ C ] [ ] uz ( ) = 0.5 u( z) yz ( ) + xz ( ) zxz ( ) = xz ( ) +.5 yz ( ) xz ( ) Odpovídá doazení do pojitéo přenou z Micael Šebek ARI-Pr =

 t yct () t yct () t uct")

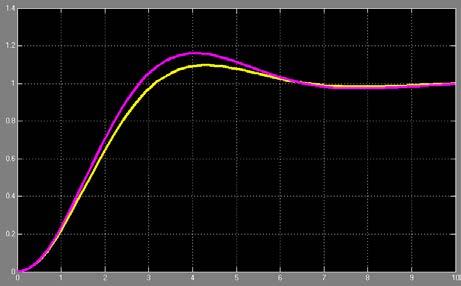
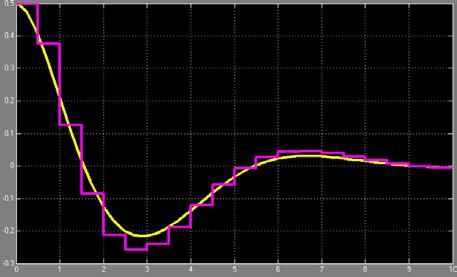
9 Příklad: porovnání Porovnáme pojité a dikrétní řízení pro = 0. z 0.9 uz ( ) = 0.5 uc ( z) yz ( ) z 0.6 ydt () t yct () t yct () t uct udt () t () t ydt () t udt () t ARI_0 AW.mdl uct () t Micael Šebek ARI-Pr


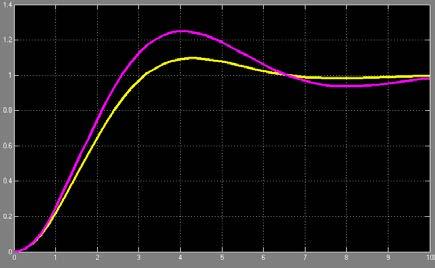
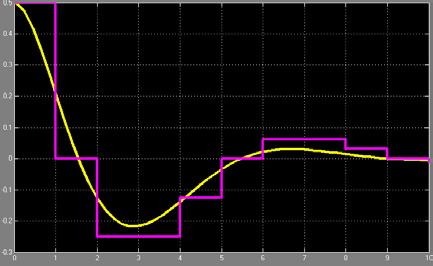

10 Příklad: porovnání Různé periody vzorkování = 0., 0.5,,.5 = 0. = = 0.5 =.5 Micael Šebek ARI-Pr
11 Příklad: jiné řešení Nejprve najdeme dikrétní přeno outavy a tvarovače G () dikrétními metodami najdeme dikrétní regulátor tak, aby řešením rovnice dotaneme = ( ) ( ) z z+ pz ( ) + z+ qz ( ) = z 3 [ p p q q ] = [ ] [ p p q q ] Gz ( ) = = z+ ( z ) pz ( ) = 34+ z 3 5 qz ( ) = + z Micael Šebek ARI-Pr-0-03
 yz ( ) = u( ) 3 C z 7 z a CL carakteritický polynom c ( ) CL z = z imulace ARI_0 AW 3.mdl pro =.")
12 Příklad: jiné řešení tento čitě dikrétní regulátor 4 5 z 35 uz ( ) = u( z) yz ( ) C 7 z+ 34 dává výledný přeno ( z+ )( z+ 3 4) yz ( ) = u( ) 3 C z 7 z a CL carakteritický polynom c ( ) CL z = z imulace ARI_0 AW 3.mdl pro =.4 3 Micael Šebek ARI-Pr-0-03
 ut () yt () počínaje 4.")

13 Příklad: jiné řešení Simulace ARI_0 AW 3.mdl pro =.4 výtup: vtup: ryclot: yt () ut () yt () počínaje 4. okamžikem vzorkování e výtup přeně rovná požadovanému (neblíží e mu jen aymptoticky)! Toto čitě dikrétní řešení je lepší než pojité a nemá obdoby mezi pojitými (není aproximací žádnéo poj) Co e tedy děje při zmenšování? Micael Šebek ARI-Pr
14 Příklad: a ještě jiné řešení Nešlo by počet kroků ještě zkrátit? Zdánlivě ano: Vyřešíme ( z z+ ) pz ( ) + ( z+ ) qz ( ) = z( z+ ) pomocí 0 0 [ p0 p q0 q] = [ 0 0 ] dotaneme p p q q [ ] = Micael Šebek 4 p ( z) = + z Tedy regulátor 4 z u = u C y z+ který dá výledný přeno uzavřené myčky y = a CL carakteritický polynom c ( ) ( ) CL z = z z+ weak q ( z) = 4 z weak ( z + ) u z C


 odalí")

15 Simulace druý model v ARI_0 AW 3.mdl vypadá OK Simulace Ale pro nenulové počáteční podmínky (třetí model tamtéž) odalí problém Všimněte i, že v okamžicíc vzorkování e cová vzorně Micael Šebek ARI-Pr
16 Nakonec ještě ukážeme řešení tavovou zpětnou vazbou Stavové rovnice dvojitéo integrátoru jou např. Jejic dikrétní verze ( ZOH a periodou vzorkování ) Zapojením tavovéo regulátoru Příklad: a ještě čtvrté, tavové řešení 0 0 xt () = xt () + ut (), y= [ 0 ] xt () 0 0 G () = xk ( + ) = xk ( ) + uk ( ), yk ( ) = [ 0 ] xk ( ) 0 uk xk u k 3 ( ) ( ) = ( ) + C ( ) Se ytém změní na car. polynomem c z = z a přenoem ( ) CL 4 xk ( + ) = xk ( ) + uc ( k), yk ( ) = [ 0 ] xk ( ) Micael Šebek ARI-Pr z + yz ( ) = u( ) C z z


17 Simulace Simulace ARI_0_3_AW_4_5.mdl pro =.4 Počínaje třetím krokem je žádaná odnota přeně natavena a řízení je nulové a to pro každé počáteční podmínky ytém je vnitřně tabilní Micael Šebek ARI-Pr

18 Cyby kvantování y analog A/D y digital y digital LSB LSB = leat ignificant bit cyba kvantování v rozmezí ±½ LSB y analog Příklad: bitový A/D na škále ±0 V Cyba ± 0.5 LSB =± V Micael Šebek ARI
21 Diskrétní modely spojitých systémů
 21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
21 Dikrétní modely pojitýc ytémů Micael Šebek Automatické řízení 2015 29-4-15 Metoda emulace Automatické řízení - Kybernetika a robotika pojitý regulátor nazývá e také aproximace, dikrétní ekvivalent,
25 Dopravní zpoždění. Michael Šebek Automatické řízení 2013 21-4-13
 5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
5 Dopravní zpoždění Michael Šebek Automatické řízení 3-4-3 Dopravní zpoždění (Time delay, tranport delay, dead time, delay-differential ytem) V reálných ytémech e čato vykytuje dopravní zpoždění yt ( )
Doplňky k přednášce 23 Diskrétní systémy Diskrétní frekvenční charakteristiky
 Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Příklady k přednášce 16 - Pozorovatel a výstupní ZV
 Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
Příklady k přednášce 6 - Pozorovatel a výtupní ZV Michael Šebek Automatické řízení 08 6-4-8 Příklad: Pozorovatel pro kyvadlo naivně pro kyvadlo frekvencí ω 0 a rovnicemi x 0 x 0 navrhneme pozorovatel dvojitým
7 - Ustálený stav kmitavý a nekmitavý, sledování a zadržení poruchy
 7 - Utálený tav kmitavý a nekmitavý, ledování a zadržení poruchy Michael Šebek Automatické řízení 018 31-3-18 Automatické řízení - ybernetika a robotika zeílení ytému na frekvenci ω je G( jω) - viz amplitudový
7 - Utálený tav kmitavý a nekmitavý, ledování a zadržení poruchy Michael Šebek Automatické řízení 018 31-3-18 Automatické řízení - ybernetika a robotika zeílení ytému na frekvenci ω je G( jω) - viz amplitudový
Příklady k přednášce 24 Diskrétní řízení
 Příklady k přednášce 4 Diskrétní řízení Michael Šebek Automatické řízení 03 3-5-4 Automatické řízení - Kybernetika a robotika Vezměme opět dvojitý integrátor vzorkovaný s periodou h h h xk ( + ) 0 xk +
Příklady k přednášce 4 Diskrétní řízení Michael Šebek Automatické řízení 03 3-5-4 Automatické řízení - Kybernetika a robotika Vezměme opět dvojitý integrátor vzorkovaný s periodou h h h xk ( + ) 0 xk +
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
20 - Číslicové a diskrétní řízení
 20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ týden doc Ing Renata WAGNEROVÁ, PhD Otrava 013 doc Ing Renata WAGNEROVÁ, PhD Vyoká škola báňká Technická univerzita
Příklady k přednášce 25 Dopravní zpoždění
 Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 23 2-4-3 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { f t } { } t f(): t f() t = t
Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 23 2-4-3 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { f t } { } t f(): t f() t = t
Příklady k přednášce 25 Dopravní zpoždění
 Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 28 5-5-8 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { } t f(): t f() t = t
Příklady k přednášce 25 Dopravní zpoždění Michael Šebek Automatické řízení 28 5-5-8 L { } Dopravní zpoždění v Laplaceově tranformaci v ( + τ ) { } t f(): t f() t = t
Vzorový test k přijímacím zkouškám do navazujícího magisterského studijního oboru Automatické řízení a informatika (2012)
") Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
Vzorový tet k přijímacím zkouškám do navazujícího magiterkého tudijního oboru Automatické řízení a informatika (22). Sekvenční logický obvod je: a) obvod, v němž je výtupní tav určen na základě vtupních
7.1. Číslicové filtry IIR
 Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
Příklady k přednášce 2 - Spojité modely
 Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 8 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti 9-6-8 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 8 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti 9-6-8 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce 2 - Spojité modely
 Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 5 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti -5-5 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce - Spojité modely Michael Šebek Atomatické řízení 5 Evropký ociální fond Praha & EU: Invetjeme do vaší bdocnoti -5-5 Atomatické řízení - Kybernetika a robotika Řešení tavové rovnice
Příklady k přednášce 19 - Polynomiální metody
 Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 016 15-4-17 Dělení polynomů: e zbytkem a bez Polynomy netvoří těleo (jako reálná číla, racionální funkce, ) ale okruh (jako
Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 016 15-4-17 Dělení polynomů: e zbytkem a bez Polynomy netvoří těleo (jako reálná číla, racionální funkce, ) ale okruh (jako
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
20 - Číslicové a diskrétní řízení
 20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2018 18-4-18 Automaticé řízení - Kybernetia a robotia Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou
20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2018 18-4-18 Automaticé řízení - Kybernetia a robotia Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou
Automatizace Úloha č.1. Identifikace regulované soustavy Strejcovou metodou
 Automatizace Úloha č. Identifikace regulované outavy Strejcovou metodou Petr Luzar 008/009 Zadání. Zapojte regulační obvod reálnou tepelnou outavou a eznamte e monitorovacím a řídicím programovým ytémem
Automatizace Úloha č. Identifikace regulované outavy Strejcovou metodou Petr Luzar 008/009 Zadání. Zapojte regulační obvod reálnou tepelnou outavou a eznamte e monitorovacím a řídicím programovým ytémem
1 Úvod do číslicové regulace
 Automatické říení II Úvod do čílicové regulace V náledujícím textu budou uvedeny ákladní vlatnoti, popiy a přehledy týkající e problematiky čílicové regulace. Některé kapitol budou také obahovat řešené
Automatické říení II Úvod do čílicové regulace V náledujícím textu budou uvedeny ákladní vlatnoti, popiy a přehledy týkající e problematiky čílicové regulace. Některé kapitol budou také obahovat řešené
8 - Geometrické místo kořenů aneb Root Locus
 8 - Geometrické míto kořenů aneb Root Locu Michael Šebek Automatické řízení 206 0-3-6 Metoda Root Locu Walter R. Evan, AIEE Tranaction, 948 Metoda root locu neboli geometrické míto kořenů vykreluje polohu
8 - Geometrické míto kořenů aneb Root Locu Michael Šebek Automatické řízení 206 0-3-6 Metoda Root Locu Walter R. Evan, AIEE Tranaction, 948 Metoda root locu neboli geometrické míto kořenů vykreluje polohu
Příklady k přednášce 19 - Polynomiální metody
 Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 013 7-4-14 Opakování: Dělení polynomů: e zbytkem a bez Polynomy tvoří okruh, ale ne těleo (Okruh tvoří také celá číla, těleo
Příklady k přednášce 19 - Polynomiální metody Michael Šebek Automatické řízení 013 7-4-14 Opakování: Dělení polynomů: e zbytkem a bez Polynomy tvoří okruh, ale ne těleo (Okruh tvoří také celá číla, těleo
Příklady k přednášce 5 - Identifikace
 Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
s požadovaným výstupem w(t), a podle této informace generuje akční zásah u(t) do
, a podle této informace generuje akční zásah u(t) do") Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
Vážení zákazníci, dovolujeme i Vá upozornit, že na tuto ukázku knihy e vztahují autorká práva, tzv. copyright. To znamená, že ukázka má loužit výhradnì pro oobní potøebu potenciálního kupujícího (aby ètenáø
( LEVEL 3 Laplaceova transformace jako nástroj řešení lineárních diferenciálních rovnic. )
") ( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
( LEVEL 3 Laplaceova tranformace jako nátroj řešení lineárních diferenciálních rovnic. ) Podívejme e tentokrát na dynamiku pracovní edačky řidiče prizmatem matematiky aneb trocha teorie jitě nikomu neuškodí...
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým
 Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Příklady k přednášce 6 - Spojování a struktury
 Příklad k přednášce 6 - Spojování a truktur Michael Šebek Automatické řízení 07 7-3-8 Automatické řízení - Kbernetika a robotika Zpětnovazební pojení tavových modelů Odvození obecného případu (značení
Příklad k přednášce 6 - Spojování a truktur Michael Šebek Automatické řízení 07 7-3-8 Automatické řízení - Kbernetika a robotika Zpětnovazební pojení tavových modelů Odvození obecného případu (značení
11 - Regulátory. Michael Šebek Automatické řízení 2015 24-3-15
 - Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
- Regulátory Michael Šebe Automaticé řízení 5 4-3-5 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
Přednáška Omezení rozlišení objektivu difrakcí
 Před A3M38VBM, J. Ficher, kat. měření, ČVUT FL Praha Přednáška Omezení rozlišení objektivu difrakcí v. 2011 Materiál je určen pouze jako pomocný materiál pro tudenty zapané v předmětu: Videometrie a bezdotykové
Před A3M38VBM, J. Ficher, kat. měření, ČVUT FL Praha Přednáška Omezení rozlišení objektivu difrakcí v. 2011 Materiál je určen pouze jako pomocný materiál pro tudenty zapané v předmětu: Videometrie a bezdotykové
24 - Diskrétní řízení
 24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
11 - Regulátory. Michael Šebek Automatické řízení
 - Regulátory Michael Šebe Automaticé řízení 7 6-3-7 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
- Regulátory Michael Šebe Automaticé řízení 7 6-3-7 Nejjednodušší regulátory Automaticé řízení - Kybernetia a robotia v jitém mylu nejjednodušší regulátor je On-Off (Bang-bang) má jen dvě možné výtupní
základní vlastnosti, používané struktury návrhové prostředky MATLAB problém kvantování koeficientů
 A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík
 Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík Bakalářká práce 6 ABSTRAKT Abtrakt čeky Tato bakalářká práce e zabývá vzorovým vypracováním zápočtových protokolů polu návrhem zadání
Podpora výuky předmětu "Teorie automatického řízení I" Petr Žajdlík Bakalářká práce 6 ABSTRAKT Abtrakt čeky Tato bakalářká práce e zabývá vzorovým vypracováním zápočtových protokolů polu návrhem zadání
Příklady k přednášce 3 - Póly, nuly a odezvy
 Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 06 9--6 Schurův doplěk - odvozeí Automatické řízeí - Kyberetika a robotika Obecě ( + l) ( + l) ( + l) ( + m) ( + m) ( + m) I 0
Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 06 9--6 Schurův doplěk - odvozeí Automatické řízeí - Kyberetika a robotika Obecě ( + l) ( + l) ( + l) ( + m) ( + m) ( + m) I 0
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
Příklady k přednášce 3 - Póly, nuly a odezvy
 Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 08 9-6-8 Nuly přeou Automatické řízeí - Kyberetika a robotika Pro přeo G ( ) = ( + ) ( + ) pólem = a ulou z = porovejme odezvy
Příklady k předášce 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 08 9-6-8 Nuly přeou Automatické řízeí - Kyberetika a robotika Pro přeo G ( ) = ( + ) ( + ) pólem = a ulou z = porovejme odezvy
Frekvenční metody syntézy
 Frevenční metody yntézy Autor: etr Havel, havelp@fel.cvut.cz 23..25 Frevenční metody návrhu e naží upravit frevenční charateritiu otevřené myčy L ta, aby výledná frevenční charateritia uzavřené myčy T
Frevenční metody yntézy Autor: etr Havel, havelp@fel.cvut.cz 23..25 Frevenční metody návrhu e naží upravit frevenční charateritiu otevřené myčy L ta, aby výledná frevenční charateritia uzavřené myčy T
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Teorie elektronických obvodů (MTEO)
") Teorie elektronických obvodů (MTEO) Laboratorní úloha čílo teoretická čát Filtry proudovými konvejory Laboratorní úloha je zaměřena na eznámení e principem činnoti proudových konvejorů druhé generace a
Teorie elektronických obvodů (MTEO) Laboratorní úloha čílo teoretická čát Filtry proudovými konvejory Laboratorní úloha je zaměřena na eznámení e principem činnoti proudových konvejorů druhé generace a
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL
 IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
IDENTIFIKACE REGULOVANÉ SOUSTAVY APLIKACE PRO PARNÍ KOTEL Ing. Zeněk Němec, CSc. VUT v Brně, Fakulta trojního inženýrtví, Útav automatizace a informatiky. Úvo, vymezení problematiky Přípěvek ouvií řešením
10 - Přímá vazba, Feedforward
 0 - Přímá vazba, Feedforward Michael Šebek Automatické řízeí 03 4--3 Motivace (FF podle Atroma) Automatické řízeí - Kberetika a robotika Už máme avržeu zpětovazebí čát Chceme zajitit přeo referece rový
0 - Přímá vazba, Feedforward Michael Šebek Automatické řízeí 03 4--3 Motivace (FF podle Atroma) Automatické řízeí - Kberetika a robotika Už máme avržeu zpětovazebí čát Chceme zajitit přeo referece rový
3 - Póly, nuly a odezvy
 3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 8 9-6-8 Automatické řízeí - Kyberetika a robotika Póly přeou a póly ytému Póly přeou jou kořey jmeovatele pro g () = b () a () jou to komplexí číla
3 - Póly, uly a odezvy Michael Šebek Automatické řízeí 8 9-6-8 Automatické řízeí - Kyberetika a robotika Póly přeou a póly ytému Póly přeou jou kořey jmeovatele pro g () = b () a () jou to komplexí číla
26 Nelineární systémy a řízení
 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Regulační obvod s měřením akční veličiny
 Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
Digitalizace převod AS DS (analogový diskrétní signál )
") Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
12 - Frekvenční metody
 12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Osnova. Idea ASK/FSK/PSK ASK Amplitudové... Strana 1 z 16. Celá obrazovka. Konec Základy radiotechniky
 Pulsní kódová modulace, amplitudové, frekvenční a fázové kĺıčování Josef Dobeš 24. října 2006 Strana 1 z 16 Základy radiotechniky 1. Pulsní modulace Strana 2 z 16 Pulsní šířková modulace (PWM) PAM, PPM,
Pulsní kódová modulace, amplitudové, frekvenční a fázové kĺıčování Josef Dobeš 24. října 2006 Strana 1 z 16 Základy radiotechniky 1. Pulsní modulace Strana 2 z 16 Pulsní šířková modulace (PWM) PAM, PPM,
5.3. Implicitní funkce a její derivace
 Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Vysokofrekvenční obvody s aktivními prvky
 Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
Vokofrekvenční obvod aktivními prvk Základními aktivními prvk ve vokofrekvenční technice jou bipolární a unipolární tranzitor. Dalšími aktivními prvk jou hbridní nebo monolitické integrované obvod. Tranzitor
Číslicové zpracování signálů a Fourierova analýza.
 Číslicové zpracování signálů a Fourierova analýza www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Úvod a motivace 2. Data v časové a frekvenční oblasti 3. Fourierova analýza teoreticky 4. Fourierova analýza
Číslicové zpracování signálů a Fourierova analýza www.kme.zcu.cz/kmet/exm 1 Obsah prezentace 1. Úvod a motivace 2. Data v časové a frekvenční oblasti 3. Fourierova analýza teoreticky 4. Fourierova analýza
Iterační metody řešení soustav lineárních rovnic. 27. prosince 2011
 Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Transformujte diferenciální výraz x f x + y f do polárních souřadnic r a ϕ, které jsou definovány vztahy x = r cos ϕ a y = r sin ϕ.
 Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
rovnic), Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =
, Definice y + p(x)y = q(x), Je-li q(x) = 0 na M, nazývá se y + p(x)y =") Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Cíle Přehled základních typů diferenciálních rovnic prvního řádu zakončíme pojednáním o lineárních rovnicích, které patří v praktických úlohách k nejfrekventovanějším. Ukážeme například, že jejich řešení
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
23 - Diskrétní systémy
 23 - Diskrétní systémy Michael Šebek Automatické řízení 215 3-5-15 Vzorkování dané metodou měření Automatické řízení - Kybernetika a robotika Systémy používající radar měření polohy cíle jednou za otáčku
23 - Diskrétní systémy Michael Šebek Automatické řízení 215 3-5-15 Vzorkování dané metodou měření Automatické řízení - Kybernetika a robotika Systémy používající radar měření polohy cíle jednou za otáčku

Teoretická elektrotechnika - vybrané statě
 Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Title: IX 6 11:27 (1 of 6)
") PŘEVODNÍKY ANALOGOVÝCH A ČÍSLICOVÝCH SIGNÁLŮ Převodníky umožňující transformaci číslicově vyjádřené informace na analogové napětí a naopak zaujímají v řídícím systému klíčové postavení. Značná část měřených
PŘEVODNÍKY ANALOGOVÝCH A ČÍSLICOVÝCH SIGNÁLŮ Převodníky umožňující transformaci číslicově vyjádřené informace na analogové napětí a naopak zaujímají v řídícím systému klíčové postavení. Značná část měřených
Příloha č. 1. amplitudová charakteristika filtru fázová charakteristika filtru / frekvence / Hz. 1. Určení proudové hustoty
 Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Diferenˇcní rovnice Diferenciální rovnice Matematika IV Matematika IV Program
 Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Přednáška v rámci PhD. Studia
 OBVODY SE SPÍNANÝMI KAPACITORY (Switched Capacitor Networks) Přednáška v rámci PhD. Studia Doc. Ing. Lubomír Brančík, CSc. UREL FEKT VUT v Brně ÚVOD DO PROBLEMATIKY Důsledek pokroku ve vývoji (miniaturizaci)
OBVODY SE SPÍNANÝMI KAPACITORY (Switched Capacitor Networks) Přednáška v rámci PhD. Studia Doc. Ing. Lubomír Brančík, CSc. UREL FEKT VUT v Brně ÚVOD DO PROBLEMATIKY Důsledek pokroku ve vývoji (miniaturizaci)
Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování. vypracovanou úlohu podle níže uvedených zadání. To mimo jiné znamená, že
 Kapitola Zadání Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování alespoň jedné úlohy je nutnou podmínkou pro úspěšné složení zkoušky resp. získaní (klasifikovaného) zápočtu (viz.
Kapitola Zadání Tento dokument obsahuje zadání pro semestrální programy z PAA. Vypracování alespoň jedné úlohy je nutnou podmínkou pro úspěšné složení zkoušky resp. získaní (klasifikovaného) zápočtu (viz.
31SCS Speciální číslicové systémy Antialiasing
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE 2006/2007 31SCS Speciální číslicové systémy Antialiasing Vypracoval: Ivo Vágner Email: Vagnei1@seznam.cz 1/7 Převod analogového signálu na digitální Složité operace,
Obsah. Gain scheduling. Obsah. Linearizace
 Regulace a řízení II Řízení nelineárních systémů Regulace a řízení II Řízení nelineárních systémů - str. 1/29 Obsah Obsah Gain scheduling Linearizace Regulace a řízení II Řízení nelineárních systémů -
Regulace a řízení II Řízení nelineárních systémů Regulace a řízení II Řízení nelineárních systémů - str. 1/29 Obsah Obsah Gain scheduling Linearizace Regulace a řízení II Řízení nelineárních systémů -
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Komplexní analýza. Laplaceova transformace. Martin Bohata. Katedra matematiky FEL ČVUT v Praze
 Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Analýza diskrétních regulačních obvodů
 Čílicové říení Analýa ECHNICÁ NIVERIA V IBERCI Hálkova 6 46 7 iberec C akulta mechatroniky a meioborových inženýrkých tudií Čílicové říení Analýa dikrétních regulačních obvodů Studijní materiály oc Ing
Čílicové říení Analýa ECHNICÁ NIVERIA V IBERCI Hálkova 6 46 7 iberec C akulta mechatroniky a meioborových inženýrkých tudií Čílicové říení Analýa dikrétních regulačních obvodů Studijní materiály oc Ing
Počítačové sítě. Lekce 5: Základy datových komunikací
 Počítačové sítě Lekce 5: Základy datových komunikací Přenos dat V základním pásmu Nemodulovaný Baseband V přeloženém pásmu Modulovaný Broadband Lekce 5: Základy datových komunikací 2 Přenos v základním
Počítačové sítě Lekce 5: Základy datových komunikací Přenos dat V základním pásmu Nemodulovaný Baseband V přeloženém pásmu Modulovaný Broadband Lekce 5: Základy datových komunikací 2 Přenos v základním
Signálové a mezisystémové převodníky
 Signálové a mezisystémové převodníky Tyto převodníky slouží pro generování jednotného nebo unifikovaného signálu z přirozených signálů vznikajících v čidlech. Často jsou nazývány vysílači příslušné fyzikální
Signálové a mezisystémové převodníky Tyto převodníky slouží pro generování jednotného nebo unifikovaného signálu z přirozených signálů vznikajících v čidlech. Často jsou nazývány vysílači příslušné fyzikální
1. Matematický model identifikované soustavy
 IDENTIFIKACE SOUSTAVY SEDAČKY SEDAČKA C.I.E.B TYPOVÉ ŘADY 5 A NÁVRH REGULAČNÍHO OBVODU GHARAZI SAYED MOHSEN Technická univerita v Liberci, fakulta trojní, katedra aplikované kybernetiky, Hálkova 6, 46
IDENTIFIKACE SOUSTAVY SEDAČKY SEDAČKA C.I.E.B TYPOVÉ ŘADY 5 A NÁVRH REGULAČNÍHO OBVODU GHARAZI SAYED MOHSEN Technická univerita v Liberci, fakulta trojní, katedra aplikované kybernetiky, Hálkova 6, 46
Inverzní z-transformace. prof. Miroslav Vlček. 25. dubna 2013
 Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky
 6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
Tlumené a vynucené kmity
 Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
Tlumené a vynucené kmity Katedra fyziky FEL ČVUT Evropský sociální fond Praha & U: Е Investujeme do vaší budoucnosti Problémová úloha 1: Laplaceova transformace Pomocí Laplaceovy transformace vlastností
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Příklady k přednášce 15 - Stavové metody
 Příklady k přednášce 5 - Stavové metody Michael Šebek Automatické řízení 8 9-4-8 Příklad: Naivní návrh stavové ZV Naivní přístup je schůdný jen pro jednoduché případy, obvykle. řádu Uvažme soustavu (kyvadlo
Příklady k přednášce 5 - Stavové metody Michael Šebek Automatické řízení 8 9-4-8 Příklad: Naivní návrh stavové ZV Naivní přístup je schůdný jen pro jednoduché případy, obvykle. řádu Uvažme soustavu (kyvadlo
Matematika 4 FSV UK, LS Miroslav Zelený
 Matematika 4 FSV UK, LS 2017-18 Miroslav Zelený 13. Diferenční rovnice 14. Diferenciální rovnice se separovanými prom. 15. Lineární diferenciální rovnice prvního řádu 16. Lineární diferenciální rovnice
Matematika 4 FSV UK, LS 2017-18 Miroslav Zelený 13. Diferenční rovnice 14. Diferenciální rovnice se separovanými prom. 15. Lineární diferenciální rovnice prvního řádu 16. Lineární diferenciální rovnice
Modelování polohových servomechanismů v prostředí Matlab / Simulink
 Modelování polohových servomechanismů v prostředí Matlab / Simulink Lachman Martin, Mendřický Radomír Elektrické pohony a servomechanismy 27.11.2013 Struktura programu MATLAB-SIMULINK 27.11.2013 2 SIMULINK
Modelování polohových servomechanismů v prostředí Matlab / Simulink Lachman Martin, Mendřický Radomír Elektrické pohony a servomechanismy 27.11.2013 Struktura programu MATLAB-SIMULINK 27.11.2013 2 SIMULINK
Funkce více proměnných. April 29, 2016
 Funkce více proměnných April 29, 2016 Příklad (Derivace vyšších řádů) Daná je funkce f (x, y) = x 2 y + y 3 x 4, určte její parc. derivace podle x a podle y prvního i druhého řádu, i smíšené. f x = 2xy
Funkce více proměnných April 29, 2016 Příklad (Derivace vyšších řádů) Daná je funkce f (x, y) = x 2 y + y 3 x 4, určte její parc. derivace podle x a podle y prvního i druhého řádu, i smíšené. f x = 2xy
ANALÝZA PRŮCHODU PAPRSKOVÝCH SVAZKŮ KOUTOVÝM ODRAŽEČEM
 ANALÝZA PRŮCHODU PAPRSKOVÝCH SVAZKŮ KOUTOVÝM ODRAŽEČEM P Kytka J Novák ČVUT v Praze Fakulta tavební katedra fyziky Práce e zabývá analýzou průchodu paprků koutovým odražečem což je typ hranolu který je
ANALÝZA PRŮCHODU PAPRSKOVÝCH SVAZKŮ KOUTOVÝM ODRAŽEČEM P Kytka J Novák ČVUT v Praze Fakulta tavební katedra fyziky Práce e zabývá analýzou průchodu paprků koutovým odražečem což je typ hranolu který je
Úvod do parciálních diferenciálních rovnic. 2 Kanonický tvar lineárních PDR 2. řádu pro funkce
 Příklady na cvičení k přednášce NMMA334 Úvod do parciálních diferenciálních rovnic 1 Kanonický tvar lineárních PDR 2. řádu pro funkce dvou proměnných 1. Určete typ parciální diferenciální rovnice u xx
Příklady na cvičení k přednášce NMMA334 Úvod do parciálních diferenciálních rovnic 1 Kanonický tvar lineárních PDR 2. řádu pro funkce dvou proměnných 1. Určete typ parciální diferenciální rovnice u xx
MATEMATIKA III. Olga Majlingová. Učební text pro prezenční studium. Předběžná verze
 Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Newtonova metoda. 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
Soustavy lineárních rovnic
 Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Příklady k přednášce 21 - Diskrétní modely spojitých systémů
 Příklady k přednášce 2 - Diskrétní modely spojitýc systémů Micael Šebek Automatické řízení 206 2-5-6 Na úvod: CL stabilita při spojitém a diskrétním řízení Automatické řízení - Kybernetika a robotika Pozor
Příklady k přednášce 2 - Diskrétní modely spojitýc systémů Micael Šebek Automatické řízení 206 2-5-6 Na úvod: CL stabilita při spojitém a diskrétním řízení Automatické řízení - Kybernetika a robotika Pozor
evodníky Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251
 Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření A/D a D/A převodnp evodníky Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251 A/D a D/A převodníky 1 Důvody převodu signálů
Univerzita Tomáše Bati ve Zlíně Ústav elektrotechniky a měření A/D a D/A převodnp evodníky Přednáška č. 14 Milan Adámek adamek@fai.utb.cz U5 A711 +420576035251 A/D a D/A převodníky 1 Důvody převodu signálů
Kamerový senzor polohy, rychlosti a zrychlení
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE Kamerový senzor polohy, rychlosti a zrychlení Plzeň 216 Štěpánka Blažková Prohlášení Předkládám tímto k posouzení
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra kybernetiky BAKALÁŘSKÁ PRÁCE Kamerový senzor polohy, rychlosti a zrychlení Plzeň 216 Štěpánka Blažková Prohlášení Předkládám tímto k posouzení