Mechanika tuhého tělesa
|
|
|
- Michaela Ševčíková
- před 6 lety
- Počet zobrazení:
Transkript
1 Mechanika tuhého tělesa
2 Tuhé těleso je ideální těleso, jehož tvar ani objem se působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky
3 Pohyby tuhého tělesa Posuvný pohyb translace Při posuvném pohybu je každá přímka spojená s tělesem stále rovnoběžná s původní polohou


4 Pohyby tuhého tělesa Otáčivý pohyb rotace Při otáčivém pohybu opisují body tuhého tělesa kružnice, jejichž středy leží na ose otáčení
5 Posuvný a otáčivý pohyb obr. Př

6 Otáčivý účinek síly Chceme-li těleso uvést do otáčivého pohybu, musíme na něj působit silou. Otáčivý účinek síly závisí na velikosti síly, směru síly a na poloze jejího působiště
7 Moment síly vzhledem k ose otáčení - vyjadřuje otáčivý účinek síly na těleso - značí se M - působí-li na těleso síla ležící v rovině kolmé k ose otáčení vypočte se M jako součin ramene síly d a velikosti síly M = d - rameno síly = kolmá vzdálenost d vektorové přímky síly od osy otáčení - Jednotka momentu síly je newtonmetr N.m
8 Moment síly vzhledem k ose otáčení Obr. M M r r sin
9 Moment síly vzhledem k ose otáčení (dohoda) Otáčivý pohyb proti směru hodinových ručiček = v kladném smyslu. Moment síly má kladné znaménko. Otáčivý pohyb po směru hodinových ručiček = v záporném smyslu. Moment síly má záporné znaménko.
10 Momentová věta Otáčivý účinek několika sil působících na těleso se ruší, je-li vektorový součet jejich momentů vzhledem k téže ose nulový n M M M M M 0 1 n i M i

11 Obr. Momentová věta
12 Skládání sil znamená nahrazení několika sil silou jedinou, která má při působení na těleso stejný pohybový účinek. Síly, které skládáme se nazývají složky Výsledná síla se nazývá výslednice
13 Skládání sil působících na těleso v jednom bodě 1. Dvě síly působí stejným směrem 2. Dvě síly působí opačným směrem 3. Dvě síly působí různým směrem

14 Dvě síly v jednom bodě stejným směrem V = 1 + 2
15 Dvě síly v jednom bodě opačným směrem V = 1-2
16 Dvě síly v jednom bodě různým směrem Výslednice je úhlopříčka rovnoběžníku sil
17 Dvě kolmé síly v jednom bodě
18 Skládání sil působících v různých bodech tělesa Předpokládáme, že se těleso působením síly nedeformuje Působiště každé síly můžeme posunout do libovolného bodu vektorové přímky této síly, aniž by se změnil její pohybový účinek na tuhé těleso
19 Skládání různoběžných sil působících v různých bodech tělesa
20 Skládání různoběžných sil působících v různých bodech tělesa
21 Rozklad sil Rozložit sílu znamená nahradit ji dvěma nebo více silami o stejném pohybovém účinku na těleso V praxi se setkáváme obvykle s 2 případy rozklad na dvě různoběžné síly rozklad na dvě rovnoběžné síly
22 Rozklad sil na nakloněné rovině Př 1 G.sin mg. sin 2 G.cos mg. cos
23 Těleso zavěšené na laně Příklad - lanovka síly působící na vrcholy stožárů jsou větší než tíha lanovky

24

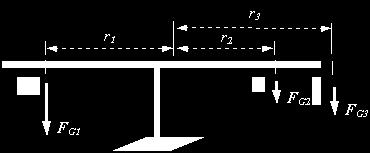
25 Rozklad tíhy tělesa na vodorovné tyči Síly 1 a 2 působí na koncích tyče na ruce dvou nosičů g d d d d g d d g d d g d d d d d d g d d d g
26 Dvojice sil = dvě stejně velké rovnoběžné síly 1 a 2 opačného směru, které působí v různých bodech tuhého tělesa otáčivého kolem nehybné osy
27 Otáčivý účinek dvojice sil na těleso Účinek dvojici sil nelze nahradit jednou silou Jejich výslednice je nulová, přesto má dvojice sil otáčivý účinek na těleso. Tento účinek vyjadřuje moment dvojice sil D d D r D označím r r M M D r M r M
28 Moment dvojice sil = součinu ramene dvojice sil a jedné síly D d. d.. rameno dvojice sil = kolmá vzdálenost vektorových přímek
29 Obecný případ Osa otáčení neleží mezi působišti obou sil, ale v libovolném bodě tuhého tělesa
30 Moment dvojice sil d D d x x D označíme d x x M M D d x M x M
31 Otáčivý účinek dvojice sil závisí na rameni dvojice sil nikoli na poloze osy otáčení

32 Těžiště tuhého tělesa Je působiště výslednice všech tíhových sil působících na jednotlivé hmotné body tělesa
33 Poloha těžiště tuhého tělesa Je stálá a závisí na rozložení látky v tělese Těžiště stejnorodých a pravidelných těles leží v jejich geometrickém středu Těžiště nestejnorodých a nepravidelných těles určujeme výpočtem nebo experimentálně Přibližně lze určit polohu těžiště podpíráním nebo zavěšováním (pomocí těžnic přímka spojující bod závěsu s těžištěm)


34 zavěšování podpírání
35 Rovnovážné polohy tělesa Těleso je v rovnovážné poloze, jestliže je vektorový součet všech sil, které na ně působí, i vektorový součet všech momentů těchto sil rovný nule

36 Stabilní (stálá) rovnovážná poloha Má ji těleso, které se po vychýlení z této polohy opět do ní vrací Těžiště tělesa je v nejnižší možné poloze Těleso má nejmenší potenciální energii tíhovou

37 Labilní (vratká) rovnovážná poloha Má ji těleso, které se po vychýlení z této polohy do ní samovolně nevrátí, ale přechází do nové stabilní polohy Těžiště tělesa je v nejvyšší možné poloze Těleso má největší potenciální energii tíhovou

38 Indiferentní (volná) rovnovážná poloha Má ji těleso, které po vychýlení zůstává v jakékoli nové poloze
39 Stabilita tělesa Stabilitu tělesa měříme prací, kterou musíme vykonat, abychom těleso uvedli ze stálé rovnovážné polohy do polohy vratké W = G.h = m.h.g Stabilita těles je tím větší, čím je těleso těžší, čím níže má těžiště a čím větší je vzdálenost svislé těžnice od hrany překlápění
40 Jednoduché stroje Jsou zařízení, která přenášejí sílu a mechanický pohyb z jednoho tělesa na jiné. Mohou přitom měnit směr i velikost síly 2 skupiny: 1. Stroje založené na rovnováze momentů sil páka, kladka, kolo na hřídeli 2. Stroje založené na rovnováze sil nakloněná rovina, klín a šroub
41 Páka = pevná tyč, otáčivá kolem osy Páka dvojzvratná dvě síly působí na různých stranách od osy Páka jednozvratná dvě síly působí na jedné straně od osy
42 Páka Páka dvojzvratná Páka jednozvratná
43 Páka
44 Rovnováha na páce Momenty obou sil jsou stejné M M 1 2 d d


45 Příklady

46 Příklady
47 Kladka Pevná Volná
48 Rovnováha na kladce Pevná kladka M1 M 2 r1 r Volná kladka M1 M 2 M 1 1 2r M r r 1 r 1 2 2
49 Kladkostroj Spojení volných a pevných kladek
50 Kladkostroj

51 Kolo na hřídeli Pracuje jako dvojzvratná páka M1 M 2 r R 1 2

52 Příklady
53 Nakloněná rovina
54 Rovnováha na nakloněné rovině 1 G.sin mg. sin 2 G.cos mg. cos

55 Rovnováha na nakloněné rovině sin h s G. sin mg. sin h s G h. G. l

56 Příklad
57 Klín Síla, která působí na podstavu klínu, se rozloží ve směru kolmém na boční stěny, přitom tyto složky jsou větší než původní síly. Velikost silových složek závisí na úhlu, který svírají boční stěny, čím je tento úhel menší (klín je ostřejší), tím jsou síly větší.


58 Klín
59 Šroub Síla 1 působí podél závitu o délce l 2.r Při jednom otočení šroubu vykoná síla 1 práci W. r Šroub překonává odporovou sílu materiálu 2 a posune se o výšku h Vykonaná práce je W. h 2 2
60
61 Rovnováha sil na šroubu Práce W 1 je rovna práci W 2 Rovnováha sil na šroubu. 2. r. h 1 2
Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa
 Mechanika tuhého tělesa Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa Mechanika tuhého tělesa těleso nebudeme nahrazovat
Mechanika tuhého tělesa Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa Mechanika tuhého tělesa těleso nebudeme nahrazovat
TUHÉ TĚLESO. Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník
 TUHÉ TĚLESO Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Tuhé těleso Tuhé těleso je ideální těleso, jehož objem ani tvar se účinkem libovolně velkých sil nemění. Pohyb tuhého tělesa: posuvný
TUHÉ TĚLESO Mgr. Jan Ptáčník - GJVJ - Fyzika - Mechanika - 1. ročník Tuhé těleso Tuhé těleso je ideální těleso, jehož objem ani tvar se účinkem libovolně velkých sil nemění. Pohyb tuhého tělesa: posuvný
1 Tuhé těleso a jeho pohyb
 1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
Obsah. 2 Moment síly Dvojice sil Rozklad sil 4. 6 Rovnováha 5. 7 Kinetická energie tuhého tělesa 6. 8 Jednoduché stroje 8
 Obsah 1 Tuhé těleso 1 2 Moment síly 2 3 Skládání sil 3 3.1 Skládání dvou různoběžných sil................. 3 3.2 Skládání dvou rovnoběžných, různě velkých sil......... 3 3.3 Dvojice sil.............................
Obsah 1 Tuhé těleso 1 2 Moment síly 2 3 Skládání sil 3 3.1 Skládání dvou různoběžných sil................. 3 3.2 Skládání dvou rovnoběžných, různě velkých sil......... 3 3.3 Dvojice sil.............................
5. Mechanika tuhého tělesa
 5. Mechanika tuhého tělesa Rozměry a tvar tělesa jsou často při řešení mechanických problémů rozhodující a podstatně ovlivňují pohybové účinky sil, které na ně působí. Taková tělesa samozřejmě nelze nahradit
5. Mechanika tuhého tělesa Rozměry a tvar tělesa jsou často při řešení mechanických problémů rozhodující a podstatně ovlivňují pohybové účinky sil, které na ně působí. Taková tělesa samozřejmě nelze nahradit
MECHANIKA TUHÉHO TĚLESA
 MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
MECHANIKA TUHÉHO TĚLESA. Základní teze tuhé těleso ideální těleso, které nemůže být deformováno působením žádné (libovolně velké) vnější síly druhy pohybu tuhého tělesa a) translace (posuvný pohyb) všechny
Digitální učební materiál
 Číslo projektu Název projektu Číslo a název šablony klíčové aktivity Digitální učební materiál CZ..07/.5.00/4.080 Zkvalitnění výuky prostřednictvím ICT III/ Inovace a zkvalitnění výuky prostřednictvím
Číslo projektu Název projektu Číslo a název šablony klíčové aktivity Digitální učební materiál CZ..07/.5.00/4.080 Zkvalitnění výuky prostřednictvím ICT III/ Inovace a zkvalitnění výuky prostřednictvím
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
6. MECHANIKA TUHÉHO TĚLESA
 6. MECHANIKA TUHÉHO TĚLESA 6.1. ZÁKLADNÍ VLASTNOSTI A POJMY Tuhé těleso: Tuhé těleso je fyzikální model tělesa u kterého uvažujeme s jeho.. a. Zanedbáváme.. Pohyb tuhého tělesa: 1). Při posuvném pohybu
6. MECHANIKA TUHÉHO TĚLESA 6.1. ZÁKLADNÍ VLASTNOSTI A POJMY Tuhé těleso: Tuhé těleso je fyzikální model tělesa u kterého uvažujeme s jeho.. a. Zanedbáváme.. Pohyb tuhého tělesa: 1). Při posuvném pohybu
VY_32_INOVACE_FY.03 JEDNODUCHÉ STROJE
 VY_32_INOVACE_FY.03 JEDNODUCHÉ STROJE Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Jednoduchý stroj je jeden z druhů mechanických
VY_32_INOVACE_FY.03 JEDNODUCHÉ STROJE Autorem materiálu a všech jeho částí, není-li uvedeno jinak, je Jiří Kalous Základní a mateřská škola Bělá nad Radbuzou, 2011 Jednoduchý stroj je jeden z druhů mechanických
F - Mechanika tuhého tělesa
 F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
Test jednotky, veličiny, práce, energie, tuhé těleso
 DUM Základy přírodních věd DUM III/2-T3-16 Téma: Práce a energie Střední škola Rok: 2012 2013 Varianta: A Zpracoval: Mgr. Pavel Hrubý TEST Test jednotky, veličiny, práce, energie, tuhé těleso 1 Účinnost
DUM Základy přírodních věd DUM III/2-T3-16 Téma: Práce a energie Střední škola Rok: 2012 2013 Varianta: A Zpracoval: Mgr. Pavel Hrubý TEST Test jednotky, veličiny, práce, energie, tuhé těleso 1 Účinnost
Mechanika - síla. Zápisy do sešitu
 Mechanika - síla Zápisy do sešitu Síla a její znázornění 1/3 Síla popisuje vzájemné působení těles (i prostřednictvím silových polí). Účinky síly: 1.Mění rychlost a směr pohybu 2.Deformační účinky Síla
Mechanika - síla Zápisy do sešitu Síla a její znázornění 1/3 Síla popisuje vzájemné působení těles (i prostřednictvím silových polí). Účinky síly: 1.Mění rychlost a směr pohybu 2.Deformační účinky Síla
BIOMECHANIKA. 3,Geometrie lidského těla, těžiště, stabilita, moment síly
 BIOMECHANIKA 3,Geometrie lidského těla, těžiště, stabilita, moment síly Studijní program, obor: Tělesná výchovy a sport Vyučující: PhDr. Martin Škopek, Ph.D. TĚŽIŠTĚ TĚLESA Tuhé těleso je složeno z velkého
BIOMECHANIKA 3,Geometrie lidského těla, těžiště, stabilita, moment síly Studijní program, obor: Tělesná výchovy a sport Vyučující: PhDr. Martin Škopek, Ph.D. TĚŽIŠTĚ TĚLESA Tuhé těleso je složeno z velkého
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Obsah 11_Síla _Znázornění síly _Gravitační síla _Gravitační síla - příklady _Skládání sil _PL:
 Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL... 8 17_Skládání různoběžných sil působících v jednom bodě...
Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL... 8 17_Skládání různoběžných sil působících v jednom bodě...
Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově
 Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 05_6_Mechanika tuhého tělesa Ing. Jakub Ulmann 6 Mechanika tuhého tělesa 6.1 Pohyb tuhého tělesa 6.2 Moment
Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 05_6_Mechanika tuhého tělesa Ing. Jakub Ulmann 6 Mechanika tuhého tělesa 6.1 Pohyb tuhého tělesa 6.2 Moment
7. Mechanika tuhého tělesa
 7. Mechanika tuhého tělesa 7. Základní poznatky Dosud jsme se při studiu pohybových účinků sil na těleso nahrazovali pevné těleso hmotným bodem. Většinou jsme nebrali v úvahu tvar a rozměry tělesa, neuvažovali
7. Mechanika tuhého tělesa 7. Základní poznatky Dosud jsme se při studiu pohybových účinků sil na těleso nahrazovali pevné těleso hmotným bodem. Většinou jsme nebrali v úvahu tvar a rozměry tělesa, neuvažovali
FYZIKA Mechanika tuhých těles
 Výukový materiál zpracován v rámci operačního projektu EU peníze školám Registrační číslo projektu: CZ.1.07/1.5.00/34.0512 Střední škola ekonomiky, obchodu a služeb SČMSD Benešov, s.r.o. FYZIKA Mechanika
Výukový materiál zpracován v rámci operačního projektu EU peníze školám Registrační číslo projektu: CZ.1.07/1.5.00/34.0512 Střední škola ekonomiky, obchodu a služeb SČMSD Benešov, s.r.o. FYZIKA Mechanika
Obsah 11_Síla _Znázornění síly _Gravitační síla _Gravitační síla - příklady _Skládání sil _PL: SKLÁDÁNÍ SIL -
 Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL - řešení... 8 17_Skládání různoběžných sil působících v jednom
Obsah 11_Síla... 2 12_Znázornění síly... 5 13_Gravitační síla... 5 14_Gravitační síla - příklady... 6 15_Skládání sil... 7 16_PL: SKLÁDÁNÍ SIL - řešení... 8 17_Skládání různoběžných sil působících v jednom
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Moment síly výpočet
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
OTAČIVÉ ÚČINKY SÍLY (Jednoduché stroje - Páka)
") OTAČIVÉ ÚČINKY SÍLY (Jednoduché stroje - Páka) A) Výklad: Posuvné účinky: Ze studia posuvných účinků síly jsme zjistili: změny rychlosti nebo směru posuvného pohybu tělesa závisejí na tom, jak velká síla
OTAČIVÉ ÚČINKY SÍLY (Jednoduché stroje - Páka) A) Výklad: Posuvné účinky: Ze studia posuvných účinků síly jsme zjistili: změny rychlosti nebo směru posuvného pohybu tělesa závisejí na tom, jak velká síla
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově
 Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 05_6_Mechanika tuhého tělesa Ing. Jakub Ulmann 6 Mechanika tuhého tělesa 6.1 Pohyb tuhého tělesa 6.2 Moment
Zavádění inovativních metod a výukových materiálů do přírodovědných předmětů na Gymnáziu v Krnově 05_6_Mechanika tuhého tělesa Ing. Jakub Ulmann 6 Mechanika tuhého tělesa 6.1 Pohyb tuhého tělesa 6.2 Moment
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/ TĚŽIŠTĚ
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.10 TĚŽIŠTĚ Těžiště (hmotný střed) je působiště tíhové síly působící na těleso. Těžiště zavádíme jako působiště
F - Jednoduché stroje
 F - Jednoduché stroje Určeno jako učební text pro studenty dálkového studia a jako shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu
F - Jednoduché stroje Určeno jako učební text pro studenty dálkového studia a jako shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
FYZIKA I. Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
Jednoduché stroje. Mgr. Dagmar Panošová, Ph.D. KFY FP TUL
 Vzdělávání pro efektivní transfer technologií a znalostí v přírodovědných a technických oborech (CZ.1.07/2.3.00/45.0011) Jednoduché stroje Mgr. Dagmar Panošová, Ph.D. KFY FP TUL TENTO PROJEKT JE SPOLUFINANCOVÁN
Vzdělávání pro efektivní transfer technologií a znalostí v přírodovědných a technických oborech (CZ.1.07/2.3.00/45.0011) Jednoduché stroje Mgr. Dagmar Panošová, Ph.D. KFY FP TUL TENTO PROJEKT JE SPOLUFINANCOVÁN
TŘENÍ A PASIVNÍ ODPORY
 Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 3. BŘEZNA 2013 Název zpracovaného celku: TŘENÍ A PASIVNÍ ODPORY A) TŘENÍ SMYKOVÉ PO NAKLONĚNÉ ROVINĚ Pohyb po nakloněné rovině bez
Předmět: Ročník: Vytvořil: Datum: MECHANIKA PRVNÍ ŠČERBOVÁ M. PAVELKA V. 3. BŘEZNA 2013 Název zpracovaného celku: TŘENÍ A PASIVNÍ ODPORY A) TŘENÍ SMYKOVÉ PO NAKLONĚNÉ ROVINĚ Pohyb po nakloněné rovině bez
3.4.2 Rovnováha Rovnováha u centrální rovinné silové soustavy nastává v případě, že výsledná síla nahrazující soustavu je rovna nule. Tedy. Obr.17.
 Obr.17. F F 1x = F.cos α1,..., Fnx = F. cos 1y = F.sin α1,..., Fny = F. sin α α n n. Původní soustava je nyní nahrazena děma soustavami sil ve směru osy x a ve směru osy y. Tutu soustavu nahradíme dvěma
Obr.17. F F 1x = F.cos α1,..., Fnx = F. cos 1y = F.sin α1,..., Fny = F. sin α α n n. Původní soustava je nyní nahrazena děma soustavami sil ve směru osy x a ve směru osy y. Tutu soustavu nahradíme dvěma
SÍLY A JEJICH VLASTNOSTI. Mgr. Jan Ptáčník - GJVJ - Fyzika - Sekunda
 SÍLY A JEJICH VLASTNOSTI Mgr. Jan Ptáčník - GJVJ - Fyzika - Sekunda Vzájemné působení těles Silové působení je vždy vzájemné! 1.Působení při dotyku 2.Působení na dálku prostřednictvím polí gravitační pole
SÍLY A JEJICH VLASTNOSTI Mgr. Jan Ptáčník - GJVJ - Fyzika - Sekunda Vzájemné působení těles Silové působení je vždy vzájemné! 1.Působení při dotyku 2.Působení na dálku prostřednictvím polí gravitační pole
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Průmyslová střední škola Letohrad. Ing. Soňa Chládková. Sbírka příkladů. ze stavební mechaniky
 Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku
 Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku 1. Určete skalární a vektorový součin dvou obecných vektorů a a popište, jak závisí výsledky těchto součinů na úhlu mezi vektory.
Fyzika 2 - rámcové příklady Magnetické pole - síla na vodič, moment na smyčku 1. Určete skalární a vektorový součin dvou obecných vektorů a a popište, jak závisí výsledky těchto součinů na úhlu mezi vektory.
Jednoduché stroje JEDNODUCHÉ STROJE. January 11, 2014. 18. jednoduché stroje.notebook. Páka
 Jednoduché stroje Základní škola Nový Bor, náměstí Míru 128, okres Česká Lípa, příspěvková organizace e mail: info@zsnamesti.cz; www.zsnamesti.cz; telefon: 487 722 010; fax: 487 722 378 Název materiálu:
Jednoduché stroje Základní škola Nový Bor, náměstí Míru 128, okres Česká Lípa, příspěvková organizace e mail: info@zsnamesti.cz; www.zsnamesti.cz; telefon: 487 722 010; fax: 487 722 378 Název materiálu:
Tematický celek: Jednoduché stroje. Úkol:
 Název: Kladka jako jednoduchý stroj. Tematický celek: Jednoduché stroje. Úkol: 1. Kladka jako jednoduchý stroj. 2. Navrhněte konstrukci robota s pevnou kladkou. 3. Určete, jakou silou působil při zvedání
Název: Kladka jako jednoduchý stroj. Tematický celek: Jednoduché stroje. Úkol: 1. Kladka jako jednoduchý stroj. 2. Navrhněte konstrukci robota s pevnou kladkou. 3. Určete, jakou silou působil při zvedání
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Projekt ŠABLONY NA GVM registrační číslo projektu: CZ.1.07/1.5.00/ III-2 Inovace a zkvalitnění výuky prostřednictvím ICT
 Projekt ŠABLONY NA GVM registrační číslo projektu: CZ.1.07/1.5.00/34.0948 III-2 Inovace a zkvalitnění výuky prostřednictvím ICT 1. Mechanika 1. 6. Energie 1 Autor: Jazyk: Aleš Trojánek čeština Datum vyhotovení:
Projekt ŠABLONY NA GVM registrační číslo projektu: CZ.1.07/1.5.00/34.0948 III-2 Inovace a zkvalitnění výuky prostřednictvím ICT 1. Mechanika 1. 6. Energie 1 Autor: Jazyk: Aleš Trojánek čeština Datum vyhotovení:
Hydromechanické procesy Hydrostatika
 Hydromechanické procesy Hydrostatika M. Jahoda Hydrostatika 2 Hydrostatika se zabývá chováním tekutin, které se vzhledem k ohraničujícímu prostoru nepohybují - objem tekutiny bude v klidu, pokud výslednice
Hydromechanické procesy Hydrostatika M. Jahoda Hydrostatika 2 Hydrostatika se zabývá chováním tekutin, které se vzhledem k ohraničujícímu prostoru nepohybují - objem tekutiny bude v klidu, pokud výslednice
MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU
 Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
23_Otáčivý účinek síly 24_Podmínky rovnováhy na páce 25_Páka rovnováha - příklady PL:
 Obsah 23_Otáčivý účinek síly... 2 24_Podmínky rovnováhy na páce... 2 25_Páka rovnováha - příklady... 3 PL: Otáčivý účinek síly - řešení... 4 27_Užití páky... 6 28_Zvedání těles - kladky... 6 29_Kladky
Obsah 23_Otáčivý účinek síly... 2 24_Podmínky rovnováhy na páce... 2 25_Páka rovnováha - příklady... 3 PL: Otáčivý účinek síly - řešení... 4 27_Užití páky... 6 28_Zvedání těles - kladky... 6 29_Kladky
1.7.7 Rovnovážná poloha, páka v praxi
 .7.7 Rovnovážná poloha, páka v praxi Předpoklady: 00706 Př. : Najdi všechny způsoby, jak umístit kuželku na stůl tak, aby byla v rovnovážné poloze. Čím se jednotlivé způsoby liší? Máme tři možnosti: normální
.7.7 Rovnovážná poloha, páka v praxi Předpoklady: 00706 Př. : Najdi všechny způsoby, jak umístit kuželku na stůl tak, aby byla v rovnovážné poloze. Čím se jednotlivé způsoby liší? Máme tři možnosti: normální
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD. 9, m s.
 TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
TÍHOVÉ ZRYCHLENÍ TEORETICKÝ ÚVOD Soustavu souřadnic spojenou se Zemí můžeme považovat prakticky za inerciální. Jen při několika jevech vznikají odchylky, které lze vysvětlit vlastním pohybem Země vzhledem
SHODNÁ ZOBRAZENÍ V ROVINĚ GEOMETRICKÁ ZOBRAZENÍ V ROVINĚ SHODNÁ ZOBRAZENÍ
 Předmět: Ročník: Vytvořil: Datum: MTEMTIK DRUHÝ Mgr. Tomáš MŇÁK 21. června 2012 Název zpracovaného celku: SHODNÁ ZORZENÍ V ROVINĚ Teoretická část GEOMETRICKÁ ZORZENÍ V ROVINĚ Zobrazení Z v rovině je předpis,
Předmět: Ročník: Vytvořil: Datum: MTEMTIK DRUHÝ Mgr. Tomáš MŇÁK 21. června 2012 Název zpracovaného celku: SHODNÁ ZORZENÍ V ROVINĚ Teoretická část GEOMETRICKÁ ZORZENÍ V ROVINĚ Zobrazení Z v rovině je předpis,
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
FYZIKA I. Pohyb setrvačníku. Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art.
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Pohyb setrvačníku Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D. Doc. Ing. Irena Hlaváčová, Ph.D. Mgr. Art. Dagmar
Příklad 5.3. v 1. u 1 u 2. v 2
 Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
Příklad 5.3 Zadání: Elektron o kinetické energii E se srazí s valenčním elektronem argonu a ionizuje jej. Při ionizaci se část energie nalétávajícího elektronu spotřebuje na uvolnění valenčního elektronu
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky. Základní pojmy
 Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Kontrolní otázky pro průběžné studium a pro přípravu ke zkoušce ze statiky Základní pojmy Pojem hmota, základní formy existence (atributy) hmoty Čím se liší pojmy hmota a hmotnost Axiomy statiky Mechanický
Obr. 9.1 Kontakt pohyblivé části s povrchem. Tomuto meznímu stavu za klidu odpovídá maximální síla, která se nezývá adhezní síla,. , = (9.
 9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
9. Tření a stabilita 9.1 Tření smykové v obecné kinematické dvojici Doposud jsme předpokládali dokonale hladké povrchy stýkajících se těles, kdy se silové působení přenášelo podle principu akce a reakce
Základní škola Karviná Nové Město tř. Družby 1383
 Základní škola Karviná Nové Město tř. Družby 1383 Projekt OP VK oblast podpory 1.4 Zlepšení podmínek pro vzdělávání na středních školách Registrační číslo projektu: CZ.1.07/1.4.00/21.3526 Název projektu:
Základní škola Karviná Nové Město tř. Družby 1383 Projekt OP VK oblast podpory 1.4 Zlepšení podmínek pro vzdělávání na středních školách Registrační číslo projektu: CZ.1.07/1.4.00/21.3526 Název projektu:
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
b) Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm
 Po etní ešení Všechny síly soustavy tedy p eložíme do po átku a p ipojíme p íslušné dvojice sil Všechny síly soustavy nahradíme složkami ve sm") b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
b) Početní řešení Na rozdíl od grafického řešení určíme při početním řešení bod, kterým nositelka výslednice bude procházet. Mějme soustavu sil, která obsahuje n - sil a i - silových dvojic obr.36. Obr.36.
Rychlost, zrychlení, tíhové zrychlení
 Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Přímková a rovinná soustava sil
 Přímková a rovinná soustava sil 1) Souřadný systém - v prostoru - v rovině + y + 2) Síla P ( nebo F) - vektorová veličina - působiště velikost orientace Soustavy sil - přehled Soustavy sil můžeme rodělit
Přímková a rovinná soustava sil 1) Souřadný systém - v prostoru - v rovině + y + 2) Síla P ( nebo F) - vektorová veličina - působiště velikost orientace Soustavy sil - přehled Soustavy sil můžeme rodělit
I N V E S T I C E D O R O Z V O J E V Z D Ě L Á V Á N Í
 DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
DYNAMIKA SÍLA 1. Úvod dynamos (dynamis) = síla; dynamika vysvětluje, proč se objekty pohybují, vysvětluje změny pohybu. Nepopisuje pohyb, jak to dělá... síly mohou měnit pohybový stav těles nebo mohou
Číslo projektu: CZ.1.07/1.4.00/21.3811 Název DUM: Skládání a rozkládání sil Číslo DUM: III/2/FY/2/1/17 Vzdělávací předmět: Fyzika Tematická oblast:
 Číslo projektu: CZ.1.07/1.4.00/21.3811 Název DUM: Skládání a rozkládání sil Číslo DUM: III/2/FY/2/1/17 Vzdělávací předmět: Fyzika Tematická oblast: Fyzikální veličiny a jejich měření Autor: Mgr. Petra
Číslo projektu: CZ.1.07/1.4.00/21.3811 Název DUM: Skládání a rozkládání sil Číslo DUM: III/2/FY/2/1/17 Vzdělávací předmět: Fyzika Tematická oblast: Fyzikální veličiny a jejich měření Autor: Mgr. Petra
Skládání různoběžných kmitů. Skládání kolmých kmitů. 1) harmonické kmity stejné frekvence :
 harmonické kmity stejné frekvence :") Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Skládání různoběžných kmitů Uvědomme si principiální bod tohoto problému : na jediný hmotný bod působí dvě nezávislé pružné síl ve dvou různých směrech. Jednotlivé mechanické pohb, které se budou skládat,
Dynamika. Dynamis = řecké slovo síla
 Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Dynamika Dynamis = řecké slovo síla Dynamika Dynamika zkoumá příčiny pohybu těles Nejdůležitější pojmem dynamiky je síla Základem dynamiky jsou tři Newtonovy pohybové zákony Síla se projevuje vždy při
Experimentální hodnocení bezpečnosti mobilní fotbalové brány
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta strojní Ústav mechaniky, biomechaniky a mechatroniky Odbor mechaniky a mechatroniky Název zprávy Experimentální hodnocení bezpečnosti mobilní fotbalové brány
NÁZEV ŠKOLY: Základní škola Javorník, okres Jeseník REDIZO: 600 150 585 NÁZEV: VY_32_INOVACE_177_Jednoduché stroje AUTOR: Ing.
 NÁZEV ŠKOLY: Základní škola Javorník, okres Jeseník REDIZO: 600 150 585 NÁZEV: VY_32_INOVACE_177_Jednoduché stroje AUTOR: Ing. Gavlas Miroslav ROČNÍK, DATUM: 7., 15.11. 2011 VZDĚL. OBOR, TÉMA: Fyzika,
NÁZEV ŠKOLY: Základní škola Javorník, okres Jeseník REDIZO: 600 150 585 NÁZEV: VY_32_INOVACE_177_Jednoduché stroje AUTOR: Ing. Gavlas Miroslav ROČNÍK, DATUM: 7., 15.11. 2011 VZDĚL. OBOR, TÉMA: Fyzika,
2.4 Výslednice rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.4 Výslednice rovinné soustavy sil Při skládání sil v rovinné soustavě zpravidla definované rovinou X-0-Y
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.4 Výslednice rovinné soustavy sil Při skládání sil v rovinné soustavě zpravidla definované rovinou X-0-Y
Druhy a charakteristika základních pasivních odporů Určeno pro první ročník strojírenství 23-41-M/01 Vytvořeno listopad 2012
 Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: Mechanika, statika Pasivní odpory Ing.Jaroslav Svoboda
Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1 Šablona: Inovace a zkvalitnění výuky prostřednictvím ICT Název: Téma: Autor: Mechanika, statika Pasivní odpory Ing.Jaroslav Svoboda
Shodná zobrazení v rovině
 Shodná zobrazení v rovině Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz. Zapisujeme Z: X X. Množinu obrazů všech
Shodná zobrazení v rovině Zobrazení Z v rovině je předpis, který každému bodu X roviny přiřazuje právě jeden bod X roviny. Bod X se nazývá vzor, bod X jeho obraz. Zapisujeme Z: X X. Množinu obrazů všech
Fyzika_6_zápis_8.notebook June 08, 2015
 SÍLA 1. Tělesa na sebe vzájemně působí (při dotyku nebo na dálku). Působení je vždy VZÁJEMNÉ. Působení na dálku je zprostředkováno silovým polem (gravitační, magnetické, elektrické...) Toto vzájemné působení
SÍLA 1. Tělesa na sebe vzájemně působí (při dotyku nebo na dálku). Působení je vždy VZÁJEMNÉ. Působení na dálku je zprostředkováno silovým polem (gravitační, magnetické, elektrické...) Toto vzájemné působení
5. Statika poloha střediska sil
 5. Statika poloha střediska sil 5.1 Rovnoběžné sily a jejich střed Uvažujeme soustavu vzájemně rovnoběžných sil v prostoru s pevnými působišti. Každá síla má působiště dané polohovým vektorem. Všechny
5. Statika poloha střediska sil 5.1 Rovnoběžné sily a jejich střed Uvažujeme soustavu vzájemně rovnoběžných sil v prostoru s pevnými působišti. Každá síla má působiště dané polohovým vektorem. Všechny
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Měření tíhového zrychlení reverzním kyvadlem
 43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
43 Kapitola 7 Měření tíhového zrychlení reverzním kyvadlem 7.1 Úvod Tíhové zrychlení je zrychlení volného pádu ve vakuu. Závisí na zeměpisné šířce a nadmořské výšce. Jako normální tíhové zrychlení g n
Podmínky k získání zápočtu
 Podmínky k získání zápočtu 18 až 35 bodů 7 % aktivní účast, omluvená neúčast Odevzdání programů Testy: 8 nepovinných testů (-2 body nebo -3 body) 3 povinné testy s ohodnocením 5 bodů (povoleny 2 opravné
Podmínky k získání zápočtu 18 až 35 bodů 7 % aktivní účast, omluvená neúčast Odevzdání programů Testy: 8 nepovinných testů (-2 body nebo -3 body) 3 povinné testy s ohodnocením 5 bodů (povoleny 2 opravné
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1.7.2 Moment síly vzhledem k ose otáčení
 .7. oment síly vzhledem k ose otáčení Předpoklady 70 Pedagogická poznámka Situaci tochu komplikuje skutečnost, že žáci si ze základní školy pamatují součin a mají pocit, že se pouze opakuje notoicky známá
.7. oment síly vzhledem k ose otáčení Předpoklady 70 Pedagogická poznámka Situaci tochu komplikuje skutečnost, že žáci si ze základní školy pamatují součin a mají pocit, že se pouze opakuje notoicky známá
7. Gravitační pole a pohyb těles v něm
 7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
5. P L A N I M E T R I E
 5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
5. P L A N I M E T R I E 5.1 Z Á K L A D N Í P L A N I M E T R I C K É P O J M Y Bod (definice, značení, znázornění) Přímka (definice, značení, znázornění) Polopřímka (definice, značení, znázornění, počáteční
6. Vektorový počet Studijní text. 6. Vektorový počet
 6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
Inovace výuky Fyzika F7/09. Těžiště tělesa
 Inovace výuky Fyzika F7/09 Těžiště tělesa Vzdělávací oblast: Vzdělávací obor: Tematický okruh: Cílová skupina: Klíčová slova: Očekávaný výstup: Člověk a příroda Fyzika Pohyb těles. Síly. 7. ročník Těžiště
Inovace výuky Fyzika F7/09 Těžiště tělesa Vzdělávací oblast: Vzdělávací obor: Tematický okruh: Cílová skupina: Klíčová slova: Očekávaný výstup: Člověk a příroda Fyzika Pohyb těles. Síly. 7. ročník Těžiště
a) Jak na sebe vzájemně mohou působit tělesa? b) Vysvětli, jak je možné, aby síla působila na dálku. c) Co může způsobit síla? d) Vysvětli pojmy a
 Jak na sebe vzájemně mohou působit tělesa? b) Vysvětli, jak je možné, aby síla působila na dálku. c) Co může způsobit síla? d) Vysvětli pojmy a") SÍLA opakování 1 a) Jak na sebe vzájemně mohou působit tělesa? b) Vysvětli, jak je možné, aby síla působila na dálku. c) Co může způsobit síla? d) Vysvětli pojmy a uveď příklady: Působení síly statické
SÍLA opakování 1 a) Jak na sebe vzájemně mohou působit tělesa? b) Vysvětli, jak je možné, aby síla působila na dálku. c) Co může způsobit síla? d) Vysvětli pojmy a uveď příklady: Působení síly statické
Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na
 Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na mnohostěny a rotační tělesa. - Mnohostěny mají stěny, hrany
Tělesa Geometrické těleso je prostorový omezený geometrický útvar. Jeho hranicí neboli povrchem je uzavřená plocha. Geometrická tělesa dělíme na mnohostěny a rotační tělesa. - Mnohostěny mají stěny, hrany
Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);
, který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje);") Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Newtonovy pohybové zákony: Hmotný bod - model (modelové těleso), který je na dané rozlišovací úrovni přiřazen reálnému objektu (součástce, části stroje); předpokládáme soustředění hmoty tělesa a všech
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Fyzikální vzdělávání. 1. ročník. Učební obor: Kuchař číšník Kadeřník. Implementace ICT do výuky č. CZ.1.07/1.1.02/ GG OP VK
 Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Fyzikální vzdělávání 1. ročník Učební obor: Kuchař číšník Kadeřník 1 1 Mechanika 1.1 Pohyby přímočaré, pohyb rovnoměrný po kružnici 1.2 Newtonovy pohybové zákony, síly v přírodě, gravitace 1.3 Mechanická
Počty testových úloh
 Počty testových úloh Tematický celek rok 2009 rok 2011 CELKEM Skalární a vektorové veličiny 4 lehké 4 těžké (celkem 8) 4 lehké 2 těžké (celkem 6) 8 lehkých 6 těžkých (celkem 14) Kinematika částice 6 lehkých
Počty testových úloh Tematický celek rok 2009 rok 2011 CELKEM Skalární a vektorové veličiny 4 lehké 4 těžké (celkem 8) 4 lehké 2 těžké (celkem 6) 8 lehkých 6 těžkých (celkem 14) Kinematika částice 6 lehkých
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
7.2.12 Vektorový součin I
 7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
7 Vektorový součin I Předpoklad: 708, 7 Při násobení dvou čísel získáváme opět číslo Skalární násobení vektorů je zcela odlišné, protože vnásobením dvou vektorů dostaneme číslo, ted něco jiného Je možné
STAVEBNÍ STATIKA. Ing. Petr Konečný, Ph.D. LPH 407/3. tel
 STAVEBNÍ STATIKA Ing. Petr Konečný, Ph.D. LPH 47/3 tel. 59 732 1394 petr.konecny@vsb.c http://fast1.vsb.c/konecny roklad síly v rovině síla pod úhlem γ - (k ose ) až -18 až +18 x A γ P P P x γ + x P x
STAVEBNÍ STATIKA Ing. Petr Konečný, Ph.D. LPH 47/3 tel. 59 732 1394 petr.konecny@vsb.c http://fast1.vsb.c/konecny roklad síly v rovině síla pod úhlem γ - (k ose ) až -18 až +18 x A γ P P P x γ + x P x
PRÁCE, VÝKON, ENERGIE. Mgr. Jan Ptáčník - GJVJ - Fyzika - 1. ročník - Mechanika
 PRÁCE, VÝKON, ENERGIE Mgr. Jan Ptáčník - GJVJ - Fyzika - 1. ročník - Mechanika Mechanická práce Závisí na velikosti síly, kterou působíme na těleso, a na dráze, po které těleso posuneme Pokud má síla stejný
PRÁCE, VÝKON, ENERGIE Mgr. Jan Ptáčník - GJVJ - Fyzika - 1. ročník - Mechanika Mechanická práce Závisí na velikosti síly, kterou působíme na těleso, a na dráze, po které těleso posuneme Pokud má síla stejný
3.1 Magnetické pole ve vakuu a v látkovén prostředí
 3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
3. MAGNETSMUS 3.1 Magnetické pole ve vakuu a v látkovén prostředí 3.1.1 Určete magnetickou indukci a intenzitu magnetického pole ve vzdálenosti a = 5 cm od velmi dlouhého přímého vodiče, jestliže jím protéká
Fyzika - Kvinta, 1. ročník
 - Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
- Fyzika Výchovné a vzdělávací strategie Kompetence k řešení problémů Kompetence komunikativní Kompetence sociální a personální Kompetence občanská Kompetence k podnikavosti Kompetence k učení Učivo fyzikální
VIDEO K TÉMATU:
 Jednoduche stroje VIDEO K TÉMATU: http://www.ceskatelevize.cz/porady/10319921345-rande-s-fyzikou/video/ Jednoduché stroje jsou využívány především kvůli tomu, aby lidem usnadnily práci. Základním principem
Jednoduche stroje VIDEO K TÉMATU: http://www.ceskatelevize.cz/porady/10319921345-rande-s-fyzikou/video/ Jednoduché stroje jsou využívány především kvůli tomu, aby lidem usnadnily práci. Základním principem
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Petr Kopelec. Elektronická cvičebnice. Tento materiál byl vytvořen v rámci projektu CZ.1.07/1.1.07/03.0027 Tvorba elektronických učebnic
 Elektronická cvičebnice Petr Kopelec Tento materiál byl vytvořen v rámci projektu CZ.1.07/1.1.07/03.0027 Tvorba elektronických učebnic O B S A H 1 Základní úlohy statiky... 3 2 Určení síly v rovině...
Elektronická cvičebnice Petr Kopelec Tento materiál byl vytvořen v rámci projektu CZ.1.07/1.1.07/03.0027 Tvorba elektronických učebnic O B S A H 1 Základní úlohy statiky... 3 2 Určení síly v rovině...
Moment síly Statická rovnováha
 Moment síly Statická rovnováha Kopírování a šíření tohoto materiálu lze pouze se souhlasem autorky PhDr. Evy Tlapákové, CSc. Jedná se o zatím pracovní verzi, rok 2009 ZKRÁCENÁ VERZE Síla může mít rozdílný
Moment síly Statická rovnováha Kopírování a šíření tohoto materiálu lze pouze se souhlasem autorky PhDr. Evy Tlapákové, CSc. Jedná se o zatím pracovní verzi, rok 2009 ZKRÁCENÁ VERZE Síla může mít rozdílný
CVIČNÝ TEST 40. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15
 CVIČNÝ TEST 40 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST 1 Vypočtěte pro a 1; 3 hodnotu výrazu 4 + a 3 + a 3 ( 2). 1 bod VÝCHOZÍ TEXT
CVIČNÝ TEST 40 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 13 IV. Záznamový list 15 I. CVIČNÝ TEST 1 Vypočtěte pro a 1; 3 hodnotu výrazu 4 + a 3 + a 3 ( 2). 1 bod VÝCHOZÍ TEXT
Čepové tření Zhotoveno ve školním roce: 2011/2012 Jméno zhotovitele: Ing. Iva Procházková
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 74601 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory 1.5
EU PENÍZE ŠKOLÁM NÁZEV PROJEKTU : MÁME RÁDI TECHNIKU REGISTRAČNÍ ČÍSLO PROJEKTU :CZ.1.07/1.4.00/21.0663
 EU PENÍZE ŠKOLÁM NÁZEV PROJEKTU : MÁME RÁDI TECHNIKU REGISTRAČNÍ ČÍSLO PROJEKTU :CZ.1.07/1.4.00/21.0663 Speciální základní škola a Praktická škola Trmice Fűgnerova 22 400 04 1 Identifikátor materiálu:
EU PENÍZE ŠKOLÁM NÁZEV PROJEKTU : MÁME RÁDI TECHNIKU REGISTRAČNÍ ČÍSLO PROJEKTU :CZ.1.07/1.4.00/21.0663 Speciální základní škola a Praktická škola Trmice Fűgnerova 22 400 04 1 Identifikátor materiálu: