Hough & Radon transform - cvičení
|
|
|
- Vojtěch Procházka
- před 6 lety
- Počet zobrazení:
Transkript



1 Hough & Radon transform - cvičení ROZ UTIA - ZOI Adam Novozámský (novozamsky@utia.cas.cz)
2 Motivace Co to je Houghova transformace a k čemu se používá?: metoda pro nalezení parametrického popisu objektů v obraze detekce jednoduchých objektů v obraze jako jsou přímky, kružnice, elipsy, atd. je používána především pro segmentaci objektů, jejichž hranice lze popsat jednoduchými křivkami aplikace také v 3D vidění 2 / 33



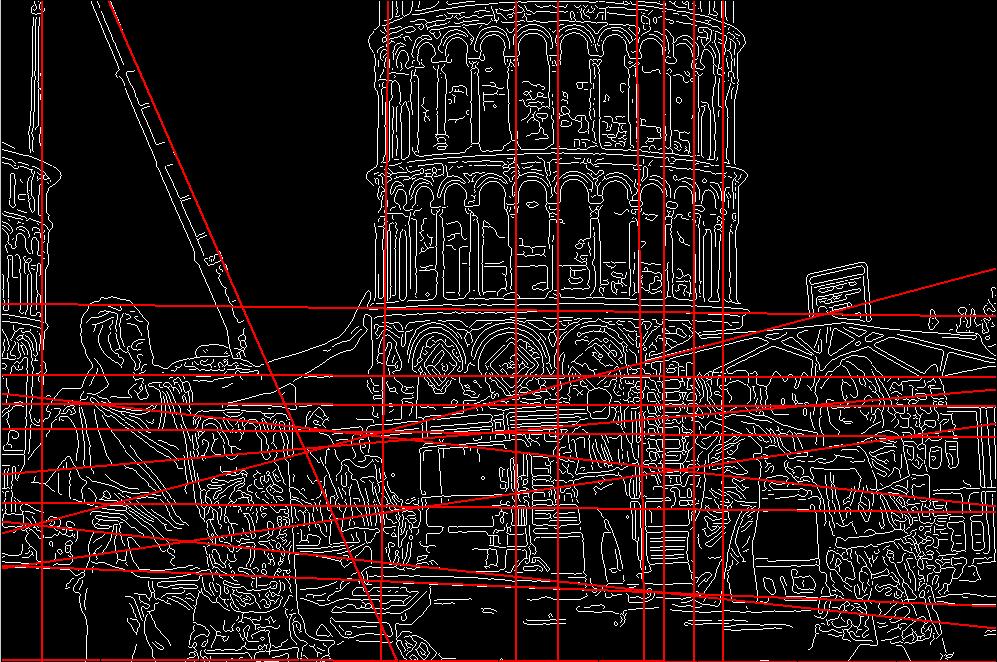
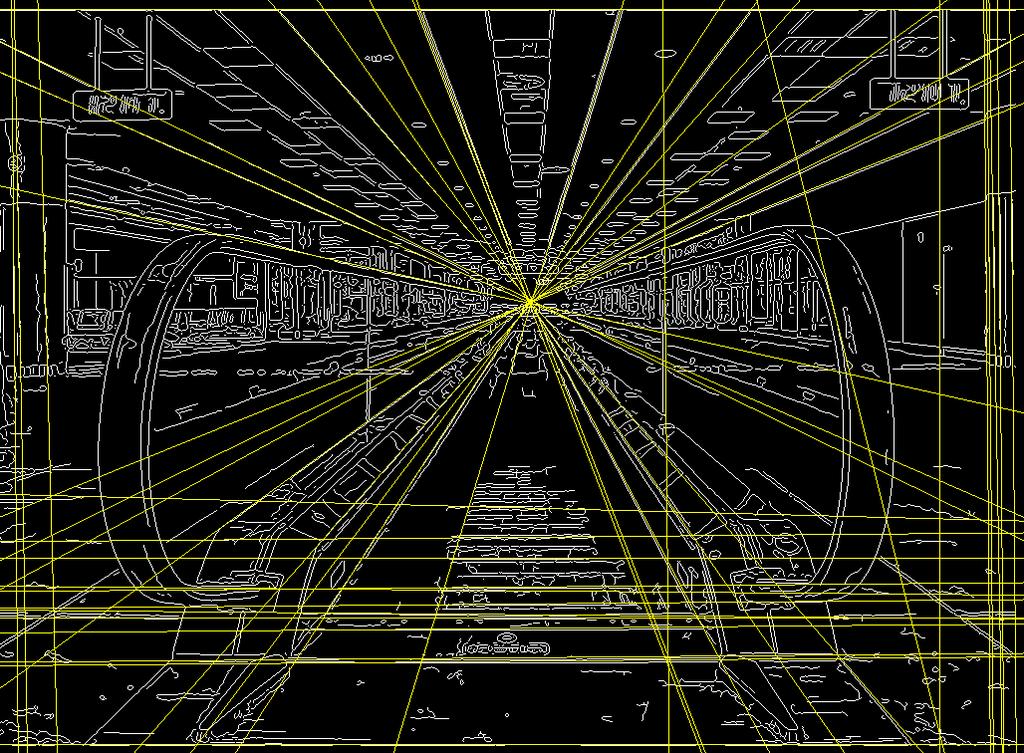
3 Motivace Aplikace: hledání úběžníků: Detekce hran / objektů: 3 / 33

4 Houghova transformace Bod v Houghově prostoru (x,y) je suma obrazových bodů náležících objektu s parametry x,y 1 bod v HP = právě 1 přímka v obrázku 4 / 33
5 HT Algoritmu Pro každý bod v HP Najdu přímku body, které jí náleží Každý bod v obrázku Započtu do všech přímek, kam náleží Tvoří sinusoidu v HP Pozn.: Bod hlasuje pro všechny směry Bod je nezávislý na okolí Výpočet trvá dlouho řád sekund 5 / 33

6 HT Příklad 6 / 33



7 HT Příklad hledání úběžníku 7 / 33
8 Úkol: Napište výpočet HT: otevřete skript houghstud.m a na vyznačené místo doplňte Nápověda I: paramatrizace přímky? : y y ax b y 0 θ r. r = x cos θ + y sin θ [1971]Duda & Hart x 0 x 8 / 33
9 Úkol: Nápověda I: paramatrizace přímky? : skript na zobrazení přímky je psán pro α = 90 θ, tedy: r = x cos(90 θ) + y sin(90 θ) = x sin α + y cos α v našem případě obrázku je [0,0] vlevo nahoře, takže pokud chceme dosazovat index matice, tak: r = x sin α y cos α x 0 -y 0 θ α r x. -y 9 / 33
10 Úkol: Napište výpočet HT: otevřete skript houghstud.m a na vyznačené místo doplňte Nápověda II: projděte v obrázku pixel po pixelu pokud je pixel nenulový, tak pro všechny směry přímek, které jím procházejí spočítám jejich vzdálenost od počátku tuto vzdálenost musím přeškálovat na vzdálenost <1,Delek> pro danou vzdálenost a úhel připočtu v matici Hits další zásah (+1) 10 / 33
11 Úkol: Napište výpočet HT: % projiti vsech pixelu snimku for Y = 1 : size(img,1) for X = 1 : size(img,2) % chci jen nenulove body if ~Img(Y,X) continue end % pro vsechny smery primek prochazejicich bodem pocitam jejich vzdalenost for U = 1 : Uhlu % uhel v radianech Alfa = U / Uhlu * pi; % vzdalenost primky od pocatku v pixelech C = sin(alfa) * X - cos(alfa) * Y; % vzdalenost preskalovana na 1 az Delek V = round(c*pixnadelky + (Delek-1)/2) + 1; % bod s uhlem U ma pro vzdalenost V dalsi hit Hits(V,U) = Hits(V,U) + 1; end end end 11 / 33
12 Úkol: Napište skript primkysnimku(img, Primek) najde a vykresli primky na snimku použijte kresliprimku.m Nápověda I: 1. detekujte hrany pomocí sobel.m 2. proveďte HT 3. najděte uhel a vzdálenost pro nejvyšší hodnotu 4. převeďte na stupně a pixely 5. vykreslete přímku pomocí kresliprimku.m 6. vynulujte tuto nejvyšší hodnotu v HP včetně malého okolí 7. opakujte bod 3 6 podle počtu hledaných přímek 12 / 33
13 Úkol: primkysnimku(img, Primek) : function primkysnimku(img, Primek) % primkysnimku(img, Primek) - najde a vykresli primky na snimku Hrany = sobel(img, 400); Hits = houghstud(hrany, 360, 800); zobr(img); % detekce hran % Houghova transformace % nachazeni nejvyznamnejsich primek Uhlopricka = norm(size(hrany)); for I = 1 : Primek waitforbuttonpress; % souradnice nejvetsi hodnoty v matici hitu [V,U] = find(hits == max(hits(:)),1); % prepocet uhlu na stupne Uhel = U / size(hits,2) * 180; % prepocet vzdalenosti na pixely Vzdal = V / size(hits,1) * 2 * Uhlopricka - Uhlopricka; % vykresleni kresliprimku(uhel, Vzdal, size(hrany,2), size(hrany,1)); % vynulovani Hits(U,V) a jeho okoli Hits(max(V-20,1):min(V+20,size(Hits,1)),... max(u-20,1):min(u+20,size(hits,2))) = 0; end 13 / 33
14 Motivace Co to je Houghova transformace a k čemu se používá?: metoda pro nalezení parametrického popisu objektů v obraze detekce jednoduchých objektů v obraze jako jsou přímky, kružnice, elipsy, atd. je používána především pro segmentaci objektů, jejichž hranice lze popsat jednoduchými křivkami aplikace také v 3D vidění 14 / 33
15 Radon Transform [Radon 1917] g ρ j, θ k = ඵ f x, y δ x cos θ k + y sin θ k ρ j dxdy y y g ρ j, θ k g ρ, θ k x θ k f x, y L ρ j, θ k x x cos θ k + y sin θ k = ρ j ρ j 15 / 33
![Radon Transform [Radon 1917] g ρ j, θ k = ඵ f x, y δ x cos θ k + y sin θ k ρ j dxdy y y g ρ j, θ k g ρ, θ k x g ρ, θ = ඵ f x, y δ x cos θ + y sin θ ρ dxdy f x, y θ k x g ρ, θ](/docs-images/102/154468710/images/16-1.jpg "= M 1 N 1 f x, y δ x cos θ + y sin θ ρ ρ j x=0 y=0 Illustration f x, y = ቊ A x2 + y 2 r 2 0 otherwise r 2 ρ 2 g ρ, θ = න Ady = g ρ = ቊ 2A r2 ρ 2 ρ r r 2 ρ 2 0 otherwise 16 /")
16 Radon Transform [Radon 1917] g ρ j, θ k = ඵ f x, y δ x cos θ k + y sin θ k ρ j dxdy y y g ρ j, θ k g ρ, θ k x g ρ, θ = ඵ f x, y δ x cos θ + y sin θ ρ dxdy f x, y θ k x g ρ, θ = M 1 N 1 f x, y δ x cos θ + y sin θ ρ ρ j x=0 y=0 Illustration f x, y = ቊ A x2 + y 2 r 2 0 otherwise r 2 ρ 2 g ρ, θ = න Ady = g ρ = ቊ 2A r2 ρ 2 ρ r r 2 ρ 2 0 otherwise 16 / 33
17 Radon Back projection: formal interpretation for a single point, g ρ j, θ k, copying the line L ρ j, θ k onto the empty image with its intensity g ρ j, θ k repeating this process of all values of ρ j in the projected signal f θk x, y = g ρ, θ k = g x cos θ k + y sin θ k, θ k f θ x, y = g x cos θ + y sin θ, θ final image by integrating over all the back-projected images : f x, y = න 0 π f θ x, y dθ ~ π θ=0 f θ x, y laminogram 17 / 33

18 Radon Back projection: A little trick that almost works! Back Projection 18 / 33

19 Radon Back projection: A little trick that almost works! Back Projection 19 / 33
![Radon [Gonzalez 2008 3rd]](/docs-images/102/154468710/images/20-0.jpg "Image 1 2 4 32 64 20 / 33")
20 Radon [Gonzalez rd] Image / 33

21 Úkol: Spočítejte Radonovu Transformaci: Spočítejte Radonovu Transformaci obrázku Shepp-Logan phantom pro úhly [0..179] a zobrazte jeho sinogram Použijte Matlab funkce phantom(), radon() 21 / 33
22 Řešení I = phantom(); theta = 0:179; [R,xp] = radon(i,theta); subplot(1,2,1) obr(i,'nofig'); title('original'); subplot(1,2,2) imshow(r,[],'xdata',theta,'ydata',xp); title(sprintf('sinogram')); xlabel('\theta (degrees)') ylabel('\rho') colormap(gca,hot), colorbar 22 / 33

23 Úkol: Spočítejte inverzní Radonovu Transformaci: Načtěte si data ze souboru sinograms.mat a zobrazte si všechny tři sinogramy. Poté pomocí funkce iradon() pro ně spočtěte IRT bez filtrace naivní back-projection 23 / 33
24 Řešení load('sinogram180.mat'); load('sinogram90.mat'); load('sinogram45.mat'); theta = 0:179; I180 = iradon(r180,theta,'none'); theta = theta(1:2:end); I90 = iradon(r90,theta,'none'); theta = theta(1:2:end); I45 = iradon(r45,theta,'none'); subplot(1,3,1) obr(i180,'nofig'); title('theta = [0:179]'); subplot(1,3,2) obr(i90,'nofig'); title('theta = [0:2:179]'); subplot(1,3,3) obr(i45,'nofig'); title('theta = [0:4:179]'); 24 / 33

25 Úkol: Spočítejte inverzní Radonovu Transformaci: To samé s Ram-Lak filtarcí 25 / 33
26 Řešení load('sinogram180.mat'); load('sinogram90.mat'); load('sinogram45.mat'); theta = 0:179; I180 = iradon(r180,theta,'ram-lak'); theta = theta(1:2:end); I90 = iradon(r90,theta,'ram-lak'); theta = theta(1:2:end); I45 = iradon(r45,theta,'ram-lak'); subplot(1,3,1) obr(i180,'nofig'); title('theta = [0:179]'); subplot(1,3,2) obr(i90,'nofig'); title('theta = [0:2:179]'); subplot(1,3,3) obr(i45,'nofig'); title('theta = [0:4:179]'); 26 / 33
27 Děkuji za pozornost! ROZ UTIA - ZOI Adam Novozámský (novozamsky@utia.cas.cz)
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů
 obrazů") ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
ROZ1 CVIČENÍ VI. Geometrická registrace (matching) obrazů REGISTRACI OBRAZU (IMAGE REGISTRATION) Více snímků téže scény Odpovídající pixely v těchto snímcích musí mít stejné souřadnice Pokud je nemají
NPGR032 Cv. 01 - úvod
 NPGR032 Cv. 01 - úvod ZS 2014 ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz 2 / 44
NPGR032 Cv. 01 - úvod ZS 2014 ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz 2 / 44
VIDEOSBÍRKA DERIVACE
 VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos 3x 3. Zderivuj funkci y = 3 e sin2 (x 2 ). Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y
VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos 3x 3. Zderivuj funkci y = 3 e sin2 (x 2 ). Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y
ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT
 ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT ZS ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz
ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT ZS ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz
BPC2E_C08 Parametrické 3D grafy v Matlabu
 BPC2E_C08 Parametrické 3D grafy v Matlabu Cílem cvičení je procvičit si práci se soubory a parametrickými 3D grafy v Matlabu. Úloha A. Protože budete řešit transformaci z kartézských do sférických souřadnic,
BPC2E_C08 Parametrické 3D grafy v Matlabu Cílem cvičení je procvičit si práci se soubory a parametrickými 3D grafy v Matlabu. Úloha A. Protože budete řešit transformaci z kartézských do sférických souřadnic,
1. Parametrické vyjádření přímky Přímku v prostoru můžeme vyjádřit jen parametricky, protože obecná rovnice přímky v prostoru neexistuje.
 1/7 ANALYTICKÁ GEOMETRIE V PROSTORU Základní pojmy: Parametrické vyjádření přímky, roviny Obecná rovnice roviny Vzájemná poloha přímek a rovin Odchylka přímek a rovin Vzdálenosti www.karlin.mff.cuni.cz/katedry/kdm/diplomky/jan_koncel/
1/7 ANALYTICKÁ GEOMETRIE V PROSTORU Základní pojmy: Parametrické vyjádření přímky, roviny Obecná rovnice roviny Vzájemná poloha přímek a rovin Odchylka přímek a rovin Vzdálenosti www.karlin.mff.cuni.cz/katedry/kdm/diplomky/jan_koncel/
Cvičení z Lineární algebry 1
 Cvičení z Lineární algebry Michael Krbek podzim 2003 2392003 Hodina Jsou dána komplexní čísla z = +2 i a w = 2 i Vyjádřete c algebraickém tvaru (z + w) 3,, (zw), z w 2 Řešte v komplexním oboru rovnice
Cvičení z Lineární algebry Michael Krbek podzim 2003 2392003 Hodina Jsou dána komplexní čísla z = +2 i a w = 2 i Vyjádřete c algebraickém tvaru (z + w) 3,, (zw), z w 2 Řešte v komplexním oboru rovnice
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
DERIVACE. ln 7. Urči, kdy funkce roste a klesá a dále kdy je konkávní a
 DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
VIDEOSBÍRKA DERIVACE
 VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x. Zderivuj funkci y = e sin2 (x 2 ). Zderivuj funkci y = x +2x 2 +sin x x 5. Zderivuj funkci y = cos2
VIDEOSBÍRKA DERIVACE. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x. Zderivuj funkci y = e sin2 (x 2 ). Zderivuj funkci y = x +2x 2 +sin x x 5. Zderivuj funkci y = cos2
1. Přímka a její části
 . Přímka a její části přímka v rovině, v prostoru, přímka jako graf funkce, konstrukce přímky nebo úsečky, analytická geometrie přímky, přímka jako tečna grafu, přímka a kuželosečka Přímka v rovině a v
. Přímka a její části přímka v rovině, v prostoru, přímka jako graf funkce, konstrukce přímky nebo úsečky, analytická geometrie přímky, přímka jako tečna grafu, přímka a kuželosečka Přímka v rovině a v
ROZ1 - Cv. 2 - Fourierova transformace ÚTIA - ZOI
 Vzorečky Co to je FT? Vzorečky Co to je FT? Transformace signálu z časové (resp. obrazové) reprezentace f(t) do frekvenční reprezentace F(ψ) a zpět. Díky ní můžeme signál analyzovat ve frekvenční oblasti
Vzorečky Co to je FT? Vzorečky Co to je FT? Transformace signálu z časové (resp. obrazové) reprezentace f(t) do frekvenční reprezentace F(ψ) a zpět. Díky ní můžeme signál analyzovat ve frekvenční oblasti
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.
![x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.](/thumbs/83/87395437.jpg "x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.") 1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
Pracovní text a úkoly ke cvičením MF002
 Pracovní text a úkoly ke cvičením MF002 Ondřej Pokora, PřF MU, Brno 11. března 2013 1 Brownův pohyb (Wienerův proces) Základním stavebním kamenem simulací náhodných procesů popsaných pomocí stochastických
Pracovní text a úkoly ke cvičením MF002 Ondřej Pokora, PřF MU, Brno 11. března 2013 1 Brownův pohyb (Wienerův proces) Základním stavebním kamenem simulací náhodných procesů popsaných pomocí stochastických
ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT
 ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT ZS 2013 ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz
ROZ II cv. 01 Dekonvoluce KM - FJFI - ČVUT ZS 2013 ÚTIA - ZOI zoi.utia.cas.cz Kontakty Ústav teorie informace a automatizace AV ČR, v.v.i. http://www.utia.cas.cz Zpracování obrazové informace http://zoi.utia.cas.cz
Linearní algebra příklady
 Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
MATEMATIKA III. π π π. Program - Dvojný integrál. 1. Vypočtěte dvojrozměrné integrály v obdélníku D: ( ), (, ): 0,1, 0,3, (2 4 ), (, ) : 1,3, 1,1,
, (, ): 0,1, 0,3, (2 4 ), (, ) : 1,3, 1,1,") MATEMATIKA III Program - vojný integrál. Vpočtěte dvojrozměrné integrál v obdélníku : + dd = { < > < > } ( 3), (, ) : 0,, 0,, dd = { < > < > } ( 4 ), (, ) :,3,,, + dd = { < > < > } ( ), (, ):,0,,, + dd=
MATEMATIKA III Program - vojný integrál. Vpočtěte dvojrozměrné integrál v obdélníku : + dd = { < > < > } ( 3), (, ) : 0,, 0,, dd = { < > < > } ( 4 ), (, ) :,3,,, + dd = { < > < > } ( ), (, ):,0,,, + dd=
Laboratorní úloha č. 8: Elektroencefalogram
 Laboratorní úloha č. 8: Elektroencefalogram Cíle úlohy: Rozložení elektrod při snímání EEG signálu Filtrace EEG v časové oblasti o Potlačení nf a vf rušení o Alfa aktivita o Artefakty Spektrální a korelační
Laboratorní úloha č. 8: Elektroencefalogram Cíle úlohy: Rozložení elektrod při snímání EEG signálu Filtrace EEG v časové oblasti o Potlačení nf a vf rušení o Alfa aktivita o Artefakty Spektrální a korelační
(3) vnitřek čtyřúhelníka tvořeného body [0, 0], [2, 4], [4, 0] a [3, 3]. (2) těleso ohraničené rovinami x = 1, y = 0 z = x a z = y
![(3) vnitřek čtyřúhelníka tvořeného body [0, 0], [2, 4], [4, 0] a [3, 3]. (2) těleso ohraničené rovinami x = 1, y = 0 z = x a z = y](/thumbs/39/19510630.jpg "(3) vnitřek čtyřúhelníka tvořeného body [0, 0], [2, 4], [4, 0] a [3, 3]. (2) těleso ohraničené rovinami x = 1, y = 0 z = x a z = y") 3. Násobné integrály 3.. Oblasti v R. Načrtněte množinu R a najděte meze integrálů f(x, y)dxdy, kde je dána: () = {(x, y) : x, y 3} () vnitřek trojúhelníka tvořeného body [, ], [, ] a [, ]. (3) vnitřek
3. Násobné integrály 3.. Oblasti v R. Načrtněte množinu R a najděte meze integrálů f(x, y)dxdy, kde je dána: () = {(x, y) : x, y 3} () vnitřek trojúhelníka tvořeného body [, ], [, ] a [, ]. (3) vnitřek
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného)
") Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
Vyhodnocení 2D rychlostního pole metodou PIV programem Matlab (zpracoval Jan Kolínský, dle programu ing. Jana Novotného) 1 Obecný popis metody Particle Image Velocimetry, nebo-li zkráceně PIV, je měřící
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
13. cvičení z Matematické analýzy 2
 . cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
. cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky
 6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
R β α. Obrázek 1: Zadání - profil složený ze třech elementárních obrazců: 1 - rovnoramenný pravoúhlý trojúhelník, 2 - čtverec, 3 - kruhová díra
 Zadání: Vypočtěte polohu těžiště, momenty setrvačnosti a deviační moment k centrálním osám a dále určete hlavní centrální momenty setrvačnosti, poloměry setrvačnosti a natočení hlavních centrálních os
Zadání: Vypočtěte polohu těžiště, momenty setrvačnosti a deviační moment k centrálním osám a dále určete hlavní centrální momenty setrvačnosti, poloměry setrvačnosti a natočení hlavních centrálních os
maticeteorie 1. Matice A je typu 2 4, matice B je typu 4 3. Jakých rozměrů musí být matice X, aby se dala provést
 Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2
![[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2](/thumbs/102/153207878.jpg "[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2") 4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
14. cvičení z Matematické analýzy 2
 4. cvičení z atematické analýzy 2 8. - 2. ledna 28 4. (Greenova věta) Použijte Greenovu větu k nalezení práce síly F (x, y) (2xy 3, 4x 2 y 2 ) vykonané na částici podél křivky Γ, která je hranicí oblasti
4. cvičení z atematické analýzy 2 8. - 2. ledna 28 4. (Greenova věta) Použijte Greenovu větu k nalezení práce síly F (x, y) (2xy 3, 4x 2 y 2 ) vykonané na částici podél křivky Γ, která je hranicí oblasti
Primární zpracování radarového signálu dopplerovská filtrace
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE K13137 - Katedra radioelektroniky A2M37RSY Jméno Stud. rok Stud. skupina Ročník Lab. skupina Václav Dajčar 2011/2012 2. 101 - Datum zadání Datum odevzdání Klasifikace
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE K13137 - Katedra radioelektroniky A2M37RSY Jméno Stud. rok Stud. skupina Ročník Lab. skupina Václav Dajčar 2011/2012 2. 101 - Datum zadání Datum odevzdání Klasifikace
17 Kuželosečky a přímky
 17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
Rovnice přímky v prostoru
 Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
Geometrické transformace pomocí matic
 Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
SEMESTRÁLNÍ PRÁCE Z X37SAS Zadání č. 7
 SEMESTRÁLNÍ PRÁCE Z X37SAS Zadání č. 7 Daniel Tureček St-lichý týden, 9:15 Zadání Určete periodu signálu s(k), určete stejnosměrnou složku, výkon, autokorelační funkci. Záznam signálu je v souboru persig2.
SEMESTRÁLNÍ PRÁCE Z X37SAS Zadání č. 7 Daniel Tureček St-lichý týden, 9:15 Zadání Určete periodu signálu s(k), určete stejnosměrnou složku, výkon, autokorelační funkci. Záznam signálu je v souboru persig2.
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ
 ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ K. Nováková 1, J. Kukal 1,2 1 Fakulta jaderná a fyzikálně inženýrská, ČVUT v Praze 2 Ústav počítačové a řídicí techniky, VŠCHT Praha
ELIMINACE VLIVU DRUHÉ ROTACE PŘI AFINNĚ INVARIANTNÍM 2D ROZPOZNÁVÁNÍ K. Nováková 1, J. Kukal 1,2 1 Fakulta jaderná a fyzikálně inženýrská, ČVUT v Praze 2 Ústav počítačové a řídicí techniky, VŠCHT Praha
Cvičné texty ke státní maturitě z matematiky
 Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Operace s obrazem I. Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno. prezentace je součástí projektu FRVŠ č.
 Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Operace s obrazem I Biofyzikální ústav Lékařské fakulty Masarykovy univerzity Brno prezentace je součástí projektu FRVŠ č.2487/2011 Osnova 1 Filtrování obrazu 2 Lineární a nelineární filtry 3 Fourierova
Lineární algebra : Změna báze
 Lineární algebra : Změna báze (13. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 8. dubna 2014, 10:47 1 2 13.1 Matice přechodu Definice 1. Nechť X = (x 1,..., x n ) a Y = (y 1,...,
Lineární algebra : Změna báze (13. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 8. dubna 2014, 10:47 1 2 13.1 Matice přechodu Definice 1. Nechť X = (x 1,..., x n ) a Y = (y 1,...,
Modelové úlohy přijímacího testu z matematiky
 PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITY KARLOVY V PRAZE Modelové úlohy přijímacího testu z matematiky r + s r s r s r + s 1 r2 + s 2 r 2 s 2 ( ) ( ) 1 a 2a 1 + a 3 1 + 2a + 1 ( a b 2 + ab 2 ) ( a + b + b b a
PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITY KARLOVY V PRAZE Modelové úlohy přijímacího testu z matematiky r + s r s r s r + s 1 r2 + s 2 r 2 s 2 ( ) ( ) 1 a 2a 1 + a 3 1 + 2a + 1 ( a b 2 + ab 2 ) ( a + b + b b a
12 Trojný integrál - Transformace integrálů
 Trojný integrál transformace integrálů) - řešené příklady 8 Trojný integrál - Transformace integrálů. Příklad Spočtěte x + y dxdydz, kde : z, x + y. Řešení Integrační obor určený vztahy z, x + y je válec.
Trojný integrál transformace integrálů) - řešené příklady 8 Trojný integrál - Transformace integrálů. Příklad Spočtěte x + y dxdydz, kde : z, x + y. Řešení Integrační obor určený vztahy z, x + y je válec.
I. Diferenciální rovnice. 3. Rovnici y = x+y+1. převeďte vhodnou transformací na rovnici homogenní (vzniklou
 Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Výpočet průsečíků paprsku se scénou
 Výpočet průsečíků paprsku se scénou 1996-2008 Josef Pelikán, MFF UK Praha http://cgg.ms.mff.cuni.cz/~pepca/ Josef.Pelikan@mff.cuni.cz NPGR004, intersection.pdf 2008 Josef Pelikán, http://cgg.ms.mff.cuni.cz/~pepca
Výpočet průsečíků paprsku se scénou 1996-2008 Josef Pelikán, MFF UK Praha http://cgg.ms.mff.cuni.cz/~pepca/ Josef.Pelikan@mff.cuni.cz NPGR004, intersection.pdf 2008 Josef Pelikán, http://cgg.ms.mff.cuni.cz/~pepca
Zadání. Goniometrie a trigonometrie
 GONIOMETRIE A TRIGONOMETRIE Zadání Sestrojte graf funkce. Určete definiční obor R, obor hodnot H, určete interval, v němž funkce roste, v němž klesá. Určete souřadnice průsečíků s osou x a s osou y. )
GONIOMETRIE A TRIGONOMETRIE Zadání Sestrojte graf funkce. Určete definiční obor R, obor hodnot H, určete interval, v němž funkce roste, v němž klesá. Určete souřadnice průsečíků s osou x a s osou y. )
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly.
, prostá cykloida, prostá epicykloida, úpatnice paraboly.") Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Kinematika rektifikace oblouku (Sobotkova a Kochaňského), prostá cykloida, prostá epicykloida, úpatnice paraboly. Výpočty trajektorií bodů při složených pohybech. Příklad 1: Je dána kružnice k s poloměrem
Projektivní geometrie. Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni
 Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
geekovo minimum počítačového Nadpis 1 Nadpis 2 Nadpis 3
 geekovo minimum Nadpis 1 Nadpis 2 Nadpis 3 počítačového vidění Adam Herout (doc. Jméno Ing. Příjmení Ph.D.) Vysoké učení technické v Brně, Fakulta informačních technologií v Brně Vysoké učení technické
geekovo minimum Nadpis 1 Nadpis 2 Nadpis 3 počítačového vidění Adam Herout (doc. Jméno Ing. Příjmení Ph.D.) Vysoké učení technické v Brně, Fakulta informačních technologií v Brně Vysoké učení technické
KONSTRUKTIVNÍ GEOMETRIE
 KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
Trojúhelníky. a jejich různé středy. Součet vnitřních úhlů trojúhelníku = 180 neboli π radiánů.
 Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Deformace rastrových obrázků
 Deformace rastrových obrázků 1997-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Warping 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 22 Deformace obrázků
Deformace rastrových obrázků 1997-2011 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Warping 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 22 Deformace obrázků
9.1 Definice a rovnice kuželoseček
 9. Kuželosečky a kvadriky 9.1 Definice a rovnice kuželoseček Kuželosečka - řez na kruhovém kuželi, množina bodů splňujících kvadratickou rovnici ve dvou proměnných. Elipsa parametricky: X(t) = (a cos t,
9. Kuželosečky a kvadriky 9.1 Definice a rovnice kuželoseček Kuželosečka - řez na kruhovém kuželi, množina bodů splňujících kvadratickou rovnici ve dvou proměnných. Elipsa parametricky: X(t) = (a cos t,
3.2. ANALYTICKÁ GEOMETRIE ROVINY
 3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
Příklad: Řešte soustavu lineárních algebraických rovnic 10x 1 + 5x 2 +70x 3 + 5x 4 + 5x 5 = 275 2x 1 + 7x 2 + 6x 3 + 9x 4 + 6x 5 = 100 8x 1 + 9x 2 +
 Příklad: Řešte soustavu lineárních algebraických rovnic 1x 1 + 5x 2 +7x 3 + 5x 4 + 5x 5 = 275 2x 1 + 7x 2 + 6x 3 + 9x 4 + 6x 5 = 1 A * x = b 8x 1 + 9x 2 + x 3 +45x 4 +22x 5 = 319 3x 1 +12x 2 + 6x 3 + 8x
Příklad: Řešte soustavu lineárních algebraických rovnic 1x 1 + 5x 2 +7x 3 + 5x 4 + 5x 5 = 275 2x 1 + 7x 2 + 6x 3 + 9x 4 + 6x 5 = 1 A * x = b 8x 1 + 9x 2 + x 3 +45x 4 +22x 5 = 319 3x 1 +12x 2 + 6x 3 + 8x
VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ
 VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ Dvě přímky v rovině mohou být: různoběžné - mají jediný společný bod, rovnoběžné různé - nemají společný bod, totožné - mají nekonečně mnoho společných bodů. ŘEŠENÉ
VZÁJEMNÁ POLOHA DVOU PŘÍMEK V ROVINĚ Dvě přímky v rovině mohou být: různoběžné - mají jediný společný bod, rovnoběžné různé - nemají společný bod, totožné - mají nekonečně mnoho společných bodů. ŘEŠENÉ
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe. Adam Novozámský (novozamsky@utia.cas.cz)
") NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
NPGR032 CVIČENÍ III. Šum a jeho odstranění teorie&praxe Adam Novozámský (novozamsky@utia.cas.cz) TEORIE Šum a jeho odstranění ŠUM Co je to šum v obrázku a jak vzniká? Jaké známe typy šumu? ŠUM V obrázku
MANUÁL K ŘEŠENÍ TESTOVÝCH ÚLOH
 Krok za krokem k nové maturitě Maturita nanečisto 005 MA4 MANUÁL K ŘEŠENÍ TESTOVÝCH ÚLOH Matematika rozšířená úroveň Vážení vyučující! ředmětoví koordinátoři Centra pro zjišťování výsledků vzdělávání pro
Krok za krokem k nové maturitě Maturita nanečisto 005 MA4 MANUÁL K ŘEŠENÍ TESTOVÝCH ÚLOH Matematika rozšířená úroveň Vážení vyučující! ředmětoví koordinátoři Centra pro zjišťování výsledků vzdělávání pro
Rovnice přímky. s = AB = B A. X A = t s tj. X = A + t s, kde t R. t je parametr. x = a 1 + ts 1 y = a 2 + ts 2 z = a 3 + ts 3. t R
 Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
ŠROUBOVICE. 1) Šroubový pohyb. 2) Základní pojmy a konstrukce
 Šroubový pohyb. 2) Základní pojmy a konstrukce") 1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
Zadání domácích úkolů a zápočtových písemek
 Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
Konstruktivní geometrie (KG-L) Zadání domácích úkolů a zápočtových písemek Sestrojte elipsu, je-li dáno a = 5cm a b = 3cm. V libovolném bodě sestrojte její tečnu. Tento úkol je na krásu, tj. udělejte oskulační
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY
 3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
Lineární algebra s Matlabem cvičení 3
 Lineární algebra s Matlabem cvičení 3 Grafika v Matlabu Základní příkazy figure o vytvoří prázdné okno grafu hold on/hold off o zapne/vypne možnost kreslení více funkcí do jednoho grafu ezplot o slouží
Lineární algebra s Matlabem cvičení 3 Grafika v Matlabu Základní příkazy figure o vytvoří prázdné okno grafu hold on/hold off o zapne/vypne možnost kreslení více funkcí do jednoho grafu ezplot o slouží
 γ α β E k r r ρ ρ 0 θ θ G Θ G U( r, t) w(z) w 0 ω z R z U( r, t) 1 c 2 2 U( r, t) t 2 = 0, U( r, t) U( r, t) = E( r, t) U( r, t) = u( r)e iωt. u( r) + k 2 u( r) = 0, k = ω/c u( r) = A exp( i k r), k
γ α β E k r r ρ ρ 0 θ θ G Θ G U( r, t) w(z) w 0 ω z R z U( r, t) 1 c 2 2 U( r, t) t 2 = 0, U( r, t) U( r, t) = E( r, t) U( r, t) = u( r)e iωt. u( r) + k 2 u( r) = 0, k = ω/c u( r) = A exp( i k r), k
(0, y) 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení
 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení") .. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
.. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
Veronika Chrastinová, Oto Přibyl
 Integrální počet II. Příklady s nápovědou. Veronika Chrastinová, Oto Přibyl 16. září 2003 Ústav matematiky a deskriptivní geometrie FAST VUT Brno Obsah 1 Dvojný integrál 3 2 Trojný integrál 7 3 Křivkový
Integrální počet II. Příklady s nápovědou. Veronika Chrastinová, Oto Přibyl 16. září 2003 Ústav matematiky a deskriptivní geometrie FAST VUT Brno Obsah 1 Dvojný integrál 3 2 Trojný integrál 7 3 Křivkový
Modelové úlohy přijímacího testu z matematiky
 PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITY KARLOVY V PRAZE Modelové úlohy přijímacího testu z matematiky r + s r s r s r + s 1 r2 + s 2 r 2 s 2 ( ) ( ) 1 a 2a 1 + a 3 1 + 2a + 1 ( a b 2 + ab 2 ) ( a + b + b b a
PŘÍRODOVĚDECKÁ FAKULTA UNIVERZITY KARLOVY V PRAZE Modelové úlohy přijímacího testu z matematiky r + s r s r s r + s 1 r2 + s 2 r 2 s 2 ( ) ( ) 1 a 2a 1 + a 3 1 + 2a + 1 ( a b 2 + ab 2 ) ( a + b + b b a
Příklady pro předmět Aplikovaná matematika (AMA) část 1
 část 1") Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]
![transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]](/thumbs/88/115112143.jpg "transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]") [1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
[1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
Kulová plocha, koule, množiny bodů
 Kulová plocha, koule, množiny bodů 1.Metodou souřadnic vyšetřete množinu všech bodů X roviny, které mají stejnou vzdálenost od dvou rovnoběžek p, q ležících v rovině. Zvolím p...osa x y =, q... y = 4,
Kulová plocha, koule, množiny bodů 1.Metodou souřadnic vyšetřete množinu všech bodů X roviny, které mají stejnou vzdálenost od dvou rovnoběžek p, q ležících v rovině. Zvolím p...osa x y =, q... y = 4,
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
Roman Juránek. Fakulta informačních technologíı. Extrakce obrazových příznaků 1 / 30
 Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Extrakce obrazových příznaků Roman Juránek Ústav počítačové grafiky a multimédíı Fakulta informačních technologíı Vysoké Učení technické v Brně Extrakce obrazových příznaků 1 / 30 Motivace Účelem extrakce
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
11MAMY LS 2017/2018. Úvod do Matlabu. 21. února Skupina 01. reseni2.m a tak dále + M souborem zadané funkce z příkladu 3 + souborem skupina.
 11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
11. cvičení z Matematické analýzy 2
 11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
Michal Zamboj. January 4, 2018
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
Vzdálenosti a východ Slunce
 Vzdálenosti a východ Slunce Zdeněk Halas KDM MFF UK, 2011 Aplikace matem. pro učitele Zdeněk Halas (KDM MFF UK, 2011) Vzdálenosti a východ Slunce Aplikace matem. pro učitele 1 / 8 Osnova Zdeněk Halas (KDM
Vzdálenosti a východ Slunce Zdeněk Halas KDM MFF UK, 2011 Aplikace matem. pro učitele Zdeněk Halas (KDM MFF UK, 2011) Vzdálenosti a východ Slunce Aplikace matem. pro učitele 1 / 8 Osnova Zdeněk Halas (KDM
Matematika 1. 1 Derivace. 2 Vlastnosti a použití. 3. přednáška ( ) Matematika 1 1 / 16
 Matematika 1 1 / 16") Matematika 1 3. přednáška 1 Derivace 2 Vlastnosti a použití 3. přednáška 6.10.2009) Matematika 1 1 / 16 1. zápočtový test již během 2 týdnů. Je nutné se něj registrovat přes webové rozhraní na https://amos.fsv.cvut.cz.
Matematika 1 3. přednáška 1 Derivace 2 Vlastnosti a použití 3. přednáška 6.10.2009) Matematika 1 1 / 16 1. zápočtový test již během 2 týdnů. Je nutné se něj registrovat přes webové rozhraní na https://amos.fsv.cvut.cz.
Odchylka ekliptiky od roviny Galaxie
 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
10. cvičení z Matematické analýzy 2
 . cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
. cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
Hledání úhlů se známou hodnotou goniometrické funkce
 4 Hledání úhlů se známou hodnotou goniometrické funkce Předpoklady: 40 Př : Najdi všechny úhly x 0;π ), pro které platí sin x = Postřeh: Obrácená úloha než dosud Zatím jsme hledali pro úhly hodnoty goniometrických
4 Hledání úhlů se známou hodnotou goniometrické funkce Předpoklady: 40 Př : Najdi všechny úhly x 0;π ), pro které platí sin x = Postřeh: Obrácená úloha než dosud Zatím jsme hledali pro úhly hodnoty goniometrických
Substituce ve vícenásobném integrálu verze 1.1
 Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Geometrie v R n. z balíku student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje. (b d)2 + (c a) 2
2 + (c a) 2") Geometrie v R n Začněme nejjednodušší úlohou: Vypočtěme vzdálenost dvou bodů v rovině. Použijeme příkaz distance z balíku student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje.
Geometrie v R n Začněme nejjednodušší úlohou: Vypočtěme vzdálenost dvou bodů v rovině. Použijeme příkaz distance z balíku student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje.
Geometrie v R n. student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje. (b d)2 + (c a) 2
2 + (c a) 2") Geometrie v R n Začněme nejjednodušší úlohou: Vypočtěme vzdálenost dvou bodů v rovině. Použijeme příkaz distance z balíku student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje.
Geometrie v R n Začněme nejjednodušší úlohou: Vypočtěme vzdálenost dvou bodů v rovině. Použijeme příkaz distance z balíku student. Poznamenejme, že vlastně počítáme délku úsečky, která oba body spojuje.
Křivky kolem nás. Webinář. 20. dubna 2016
 Křivky kolem nás Webinář 20. dubna 2016 Přístup k funkcím Funkce (zobrazení) Předpis, který přiřazuje jedné hodnotě x hodnotu y = f (x). Je to množina F uspořádaných dvojic (x, y) takových, že pokud (x,
Křivky kolem nás Webinář 20. dubna 2016 Přístup k funkcím Funkce (zobrazení) Předpis, který přiřazuje jedné hodnotě x hodnotu y = f (x). Je to množina F uspořádaných dvojic (x, y) takových, že pokud (x,
Filip Hroch. Astronomické pozorování. Filip Hroch. Výpočet polohy planety. Drahové elementy. Soustava souřadnic. Pohyb po elipse
 ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Funkce a základní pojmy popisující jejich chování
 a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK
 FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
FAKULTA STAVEBNÍ VUT V BRNĚ PŘIJÍMACÍ ŘÍZENÍ PRO AKADEMICKÝ ROK 00 007 TEST Z MATEMATIKY PRO PŘIJÍMACÍ ZKOUŠKY ČÍSLO FAST-M-00-0. tg x + cot gx a) sinx cos x b) sin x + cos x c) d) sin x e) +. sin x cos
Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech."
 Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech." Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Na
Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Grafická data jsou u 2D vektorové grafiky uložena ve voxelech." Téma: Vektorová grafika. Určete pravdivost následujícího tvrzení: "Na
Rost Marek, Záruba Lukáš školitelé: Z. Sekerešová, J. Šonský. Cesta k vědě 19.6.2011
 Studium dynamických jevů v termickém plazmatu Rost Marek, Záruba Lukáš školitelé: Z. Sekerešová, J. Šonský Cesta k vědě 19.6.2011 M. Rost, L. Záruba (CkV) Studium jevů v plazmatu 19.6.2011 1 / 28 Obsah
Studium dynamických jevů v termickém plazmatu Rost Marek, Záruba Lukáš školitelé: Z. Sekerešová, J. Šonský Cesta k vědě 19.6.2011 M. Rost, L. Záruba (CkV) Studium jevů v plazmatu 19.6.2011 1 / 28 Obsah
Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci)
 spojité parciální derivace v bodě a, pak lineární formu (funkci)") 2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
11. cvičení z Matematiky 2
 11. cvičení z Mateatiky. - 6. května 16 11.1 Vypočtěte 1 x + y + z dv, kde : x + y + z 1. Věta o substituci á analogický tva a podínky pouze zanedbatelné nožiny nyní zahnují i plochy, oviny atd.: f dv
11. cvičení z Mateatiky. - 6. května 16 11.1 Vypočtěte 1 x + y + z dv, kde : x + y + z 1. Věta o substituci á analogický tva a podínky pouze zanedbatelné nožiny nyní zahnují i plochy, oviny atd.: f dv
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ KYBERNETIKA, AUTOMATIZACE A MĚŘENÍ. MRBT Projekt
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ KYBERNETIKA, AUTOMATIZACE A MĚŘENÍ MRBT Projekt S11. Jízda po čáře - optické snímání čáry Vypracoval: Program: Obor: Vedoucí:
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ KYBERNETIKA, AUTOMATIZACE A MĚŘENÍ MRBT Projekt S11. Jízda po čáře - optické snímání čáry Vypracoval: Program: Obor: Vedoucí:
1 Základní funkce pro zpracování obrazových dat
 1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
1 Základní funkce pro zpracování obrazových dat 1.1 Teoretický rozbor 1.1.1 Úvod do zpracování obrazu v MATLABu MATLAB je primárně určen pro zpracování a analýzu numerických dat. Pro analýzu obrazových
ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE. Matematika 0A1. Cvičení, zimní semestr. Samostatné výstupy. Jan Šafařík
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup