Statická analýza fyziologických systémů
|
|
|
- Michaela Kubíčková
- před 7 lety
- Počet zobrazení:
Transkript
1 Statická analýza fyziologických systémů Studijní materiály Khoo: Physiological Control Systems Chapter 3 Static Analysis of Physiological Systems

2
3 Statická analýzy fyziologických systémů Příklad Regulace srdečního výdeje
4 Regulace srdečního výdeje
5 Regulace srdečního výdeje Na konci diastoly: Na konci systoly: Systolický objem: Minutový objem: Q c >=0
6 Sympaticus - parasympaticus Regulace srdečního výdeje Diastolická dysfunkce
7 Sympaticus - parasympaticus Regulace srdečního výdeje Diastolická dysfunkce Intrapleurální tlak
8 Regulace srdečního výdeje Venózní návrat Mean systemic pressure P ms
9 Regulace srdečního výdeje Venózní návrat Mean systemic pressure P ms C V =18 C A
10 Regulace srdečního výdeje Uzavřená smyčka Sympatikus f Vasodilatace, R A venokonstrikce C V C A cvičení
11 Regulace srdečního výdeje Uzavřená smyčka Sympatikus f Vasodilatace, R A venokonstrikce C V C A C S C D V v V A cvičení infarkt
12 Viz
13 Frekvenční analýza fyziologických systémů Studijní materiály Khoo: Physiological Control Systems Chapter 5 Frequency-domain anaylsis of linear control systems

14



15 Nejjednodušší model mechaniky dýchání P ao P A Výstup Vstup = P A t P ao t přenos P ao = LC d2 P A dt 2 + RC dp A dt + P A

16 P ao = LC d2 P A dt 2 + RC dp A dt + P A


17 Stejné výsledky P ao = LC d2 P A dt 2 + RC dp A dt + P A Parameters: a: {L*C,R*C,1} b: {1}
18 Stejné výsledky H s = Výstup Vstup = P A t P ao t = 1 LCs 2 + RCs + 1
19 Budící vstup - 1 Hz Pao PA
20 Budící vstup - 3 Hz Pao PA
21 Budící vstup - 8 Hz Pao PA
22 Kmitočtový přenos Vstupní funkce: u t = u 0 sin ωt Z Eulerova vztahu: u t = u 0 e jωt Výstup po ustálení: Kmitočtový přenos: +j ω u 0 y t = y 0 sin ωt + φ φ = ωt 0 H jω = y(t) u(t) = y 0e j ωt+φ u 0 e jωt = y 0 u 0 e jφ u(t) S y(t) y t = y 0 ej ωt+φ +j ω y 0 modul: u 0 argument: φ y 0 φ = ωt 0
23 Kmitočtový přenos +j ω u 0 u(t) S y(t) +j ω y 0 φ = ωt 0 a n y n t + + a 1 y t + a 0 y t = b m u m t + + b 0 u(t) j ωt+φ y t = y 0 e y t = jωy 0 ej ωt+φ u y t = jω 2 y 0 ej ωt+φ y (n) t = jω n j ωt+φ y 0 e u t = u 0 e jωt t = jωu 0 e jωt u t = jω 2 u 0 e jωt u (m) t = jω m u 0 e jωt y 0 e j ωt+φ a n jω n + + a 1 jω + a 0 = u 0 e jωt b m jω m + + b 1 jω + b 0 Kmitočtový přenos: H jω = y(t) = y 0e j ωt+φ u(t) u 0 e jωt = b m jω m + + b 1 jω + b 0 a n jω n + + a 1 jω + a 0
24 Kmitočtový přenos Kmitočnový přenos je také: podíl Furierova obrazu výstupní veličiny systému a Furierova obrazu vstupní veličiny (při nulových počátečních podmínkách systému a vstupního signálu) H jω = Y(jω) U(jω) Aby funkce měla Furierův obraz, musí být absolutně integrovatelná, tj.: 0 f(t) dt < Obrazový přenos v Laplaceově transformaci: Kmitočtový přenos systému získáme z Laplaceovy transformace formální záměnou proměnných s jω: H jω = H s s=jω = b m jω m + +b 1 jω+b 0 a n jω n + +a 1 jω+a 0 H s = Y(s) U(s) = b m s m + +b 1 s+b 0 a n s n + +a 1 s+a 0 Takže, když např. máme k dispozici kmitočtovou funkci, můžeme její Laplaceovou transformací získat kmitočtový přenos: H jw = 0 g t e jωt dt
25 Amplitudo-fázová kmitočtová charakteristika ve fázové rovině G jω = P ω + jq ω = Re G jω + j Im G(jω) G jω = A ω e jφ(ω) = G(jω) + j Im G(jω) Im A ω = mod G jω = P 2 ω + Q 2 (ω) φ ω = arg G jω = arctg Q(ω) P(ω) 0 φ(ω i ) P(ω i ) ω = 0 Re Q(ω i )
 2 +RCjω +")
26 P ao P A P ao = LC d2 P A dt 2 + RC dp A dt + P A H s = Výstup Vstup = P A t P ao t = 1 LCs 2 + RCs + 1 H ω = Výstup Vstup = P A t P ao t = 1 LC(jω) 2 +RCjω + 1
27 H ω = Výstup Vstup = P A t P ao t = 1 LC(jω) 2 +RCjω + 1

 P A s P ao s = 1 LCs 2 +")
28 Nejjednodušší model mechaniky dýchání Otevřená smyčka P ao 1 LCs 2 + RCs + 1λ P A Ventilátor - zdroj tlaku P ao + 1 LCs 2 + RCs + 1λ Uzavřená smyčka P A P o Vnější atmosferický tlak P A Setrvačnost L - Inertance Odpor R- Rezistance P A Pružný C - Kapacitance vak Otevřená smyčka: λ = 1 Uzavřená smyčka: λ > 1 k P A s P ao s = 1 LCs 2 + RCs + 1 P A s P ao s kp A s = 1 LCs 2 + RCs + 1 P A s P ao s = 1 LCs 2 + RCs + (1 + k) P A s P ao s = 1 LCs 2 + RCs + λ
29 P ao 1 LCs 2 + RCs + λ P A P ao + 1 LCs 2 + RCs + 1 P A k
30 Kmitočtové charakteristiky v logaritmických souřadnicích H jω = A(ω)e iφ(ω) ln H jω = ln A ω + jφ ω = ln H(jω) + j arg H(jω) Logaritmická amplitudová charakteristika: ln H(jω) Logaritmická fázová charakteristika: φ ω = f(ω) (osa kmitočtu má logaritmické měřítko) Ve skutečnosti se užívá dekadický logaritmus pro osu úhlového kmitočtu ω, tj. log 10 ω A na osu pořadnic amplitudové charakteristiky se vynáší absolutní hodnota kmitočtového přenosu v decibelech: A db = H (jω) db = 20log 10 H (jω) Výhoda: násobení přenosů v logaritmických souřadnicích přechází na sčítání.
31
32 Frekvenční analýza modelů fyziologických systémů
33 Frekvenční analýza modelů fyziologických systémů
34 Frekvenční analýza modelů fyziologických systémů
35 Nyquistovy diagramy Viz: Khoo: Physiological Control Systems Analýza systémů na fyziologických příkladech
36 Niquistovo kritérium stability Jednotkový budící signál + - S im R -1 1 re
37 Niquistovo kritérium stability Jednotkový budící signál + - S im R -1 1 re
38 Niquistovo kritérium stability Jednotkový budící signál + - S im R -1 1 re
39 Regulace a stabilita ve fyziologických systémech Studijní materiály
40

41

42

43

44 Rychlost tvorby Rychlost zániku Počet neutrofilů Počet neutrofilů
45
46 Struktura regulačního systému Srdce Q = V s /T Minutový objem srdeční Q Mechanika oběhového systému Arteriální krevní tlak P art Doba srdeční periody T Systolický objem V s Td dopravní zpoždění baroreflex

47
48

49

50

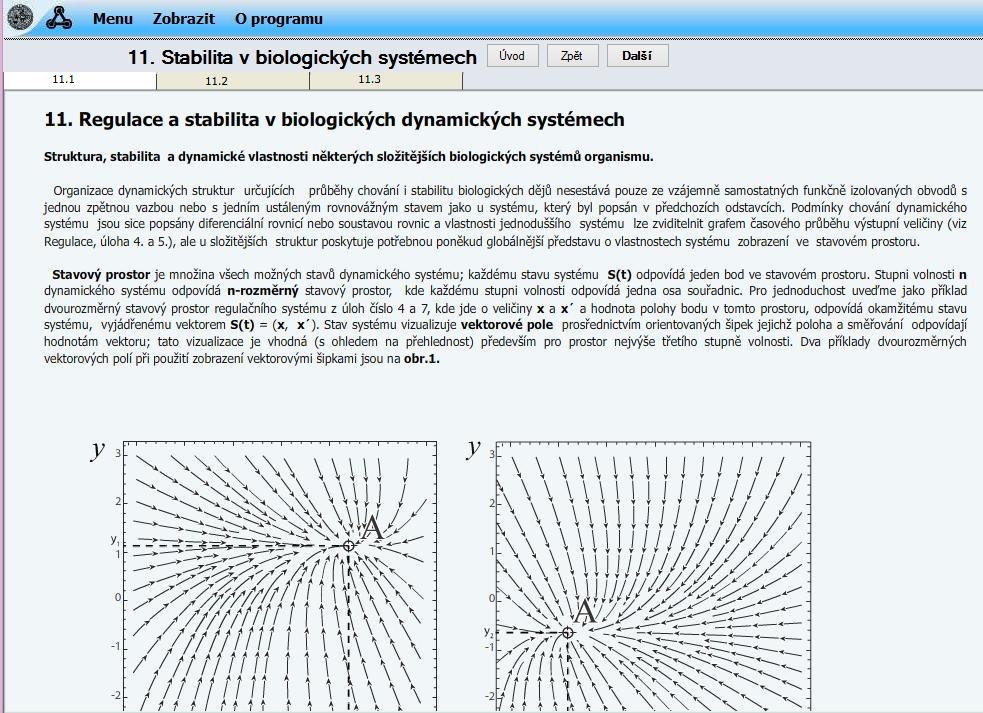
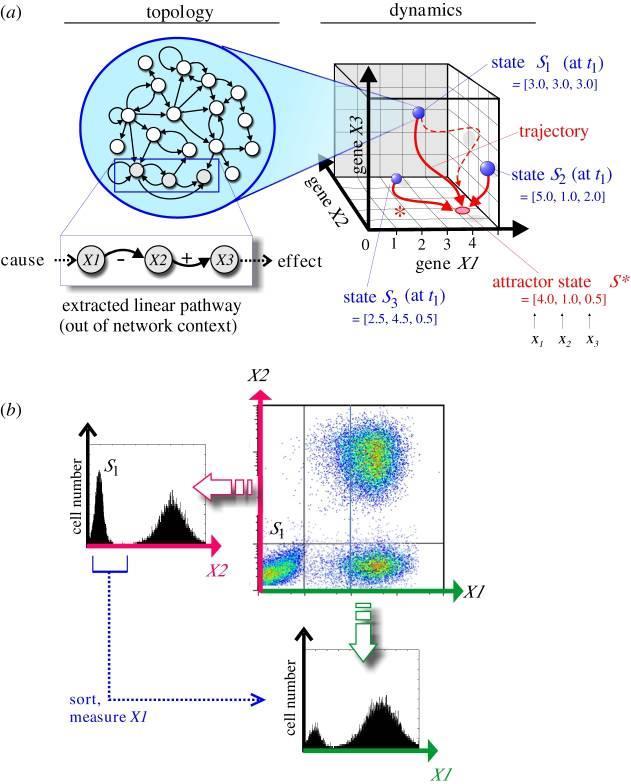
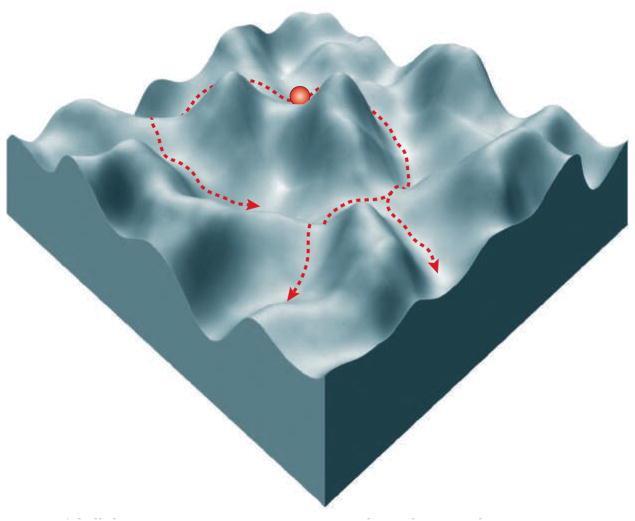
51 Trajektorie ultrastabilního systému
52

53

54 The core embryonic stem cell transcriptional circuit
55
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Přenos pasivního dvojbranu RC
 Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Předmět A3B31TES/Př. 7
 Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
, p = c + jω nejsou zde uvedeny všechny vlastnosti viz lit.
 Statiké a dynamiké harakteristiky Úvod : Základy Laplaeovy transformae dále LT: viz lit. hlavní užití: - převádí difereniální rovnie na algebraiké (nehomogenní s konstantními koefiienty - usnadňuje řešení
Statiké a dynamiké harakteristiky Úvod : Základy Laplaeovy transformae dále LT: viz lit. hlavní užití: - převádí difereniální rovnie na algebraiké (nehomogenní s konstantními koefiienty - usnadňuje řešení
Regulační obvod s měřením regulováné veličiny
 Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
Regulační obvod s měřením regulováné veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující
ISŠ Nová Paka, Kumburská 846, Nová Paka Automatizace Dynamické vlastnosti členů frekvenční charakteristiky
 1. Přenos členu ISŠ Nová Paka, Kumburská 846, 50931 Nová Paka V praxi potřebujeme znát časový průběh výstupního signálu, vyvolaný vstupním signálem známého průběhu. Proto zavádíme tzv. přenos, charakterizující
1. Přenos členu ISŠ Nová Paka, Kumburská 846, 50931 Nová Paka V praxi potřebujeme znát časový průběh výstupního signálu, vyvolaný vstupním signálem známého průběhu. Proto zavádíme tzv. přenos, charakterizující
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Regulační obvod s měřením akční veličiny
 Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Regulační obvod s měřením akční veličiny Zadání Soustava vyššího řádu je vytvořena z několika bloků nižšího řádu, jak je patrno z obrázku. Odvoďte výsledný přenos soustavy vyššího řádu popisující dané
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Impedanční děliče - příklady
 Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
Harmonický průběh napětí a proudu v obvodu
 Harmonický průběh napětí a proudu v obvodu Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Veličiny elektrických obvodů napětí u(t) okamžitá hodnota,
Harmonický průběh napětí a proudu v obvodu Ing. Martin Černík, Ph.D. Projekt ESF CZ.1.07/2.2.00/28.0050 Modernizace didaktických metod a inovace. Veličiny elektrických obvodů napětí u(t) okamžitá hodnota,
Lineární a adpativní zpracování dat. 3. Lineární filtrace I: Z-transformace, stabilita
 Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Elektromechanický oscilátor
 - 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
- 1 - Elektromechanický oscilátor Ing. Ladislav Kopecký, 2002 V tomto článku si ukážeme jeden ze způsobů, jak využít silové účinky cívky s feromagnetickým jádrem v rezonanci. I člověk, který neoplývá technickou
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano
 = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) při první iteraci ano") Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
Kmitočtová analýza (AC Analysis) = analýza kmitočtových závislostí obvodových veličin v harmonickém ustáleném stavu (HUS) - napodobování činnosti inteligentního obvodového analyzátoru. Další příbuzné analýzy:
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Vykreslete převodní, modulovou a fázovou charakteristiku C-R článku. Zjistěte rezonanční frekvenci tohoto článku. Proveďte šumovou analýzu obvodu.
 1 Střídavé analýzy Cílem cvičení je osvojení práce s jednotlivými střídavými analýzami, kmitočtovou analýzou, a šumovou analýzou. Prováděna bude analýza kmitočtových závislostí obvodových veličin v harmonickém
1 Střídavé analýzy Cílem cvičení je osvojení práce s jednotlivými střídavými analýzami, kmitočtovou analýzou, a šumovou analýzou. Prováděna bude analýza kmitočtových závislostí obvodových veličin v harmonickém
Semestrální práce z předmětu Teorie systémů
 Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
Semestrální práce z předmětu Teorie systémů Autor: Tomáš Škařupa Skupina :3I3X Vedoucí hodiny: Ing. Libor Pekař Datum 3.. Obsah Analýza a syntéza jednorozměrného spojitého lineárního systému... 3. Přenosovou
Diplomová práce. Použití frekvenčních charakteristik při analýze a syntéze regulačních obvodů. Inženýrská informatika a automatizace
 Diplomová práce Použití frekvenčních charakteristik při analýze a syntéze regulačních obvodů Vypracoval: Vedoucí práce: Obor: Specializace: 6 Miroslav Kij Ing. Olga Davidová, Ph. D Inženýrská informatika
Diplomová práce Použití frekvenčních charakteristik při analýze a syntéze regulačních obvodů Vypracoval: Vedoucí práce: Obor: Specializace: 6 Miroslav Kij Ing. Olga Davidová, Ph. D Inženýrská informatika
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Nauka o Kmitání Přednáška č. 4
 Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Grafické zobrazení frekvenčních závislostí
 Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
Automatizační technika. Regulační obvod. Obsah
 30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
30.0.07 Akademický rok 07/08 Připravil: Radim Farana Automatizační technika Regulátory Obsah Analogové konvenční regulátory Regulátor typu PID Regulátor typu PID i Regulátor se dvěma stupni volnosti Omezení
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
MECHANIKA SRDEČNÍ ČINNOSTI SRDCE JAKO PUMPA SRDEČNÍ CYKLUS SRDEČNÍ SELHÁNÍ
 MECHANIKA SRDEČNÍ ČINNOSTI SRDCE JAKO PUMPA SRDEČNÍ CYKLUS SRDEČNÍ SELHÁNÍ VZTAH DÉLKA - TENZE Pasivní protažení, aktivní protažení, izometrický stah, izotonický stah, auxotonní stah SRDEČNÍ VÝDEJ (MO)
MECHANIKA SRDEČNÍ ČINNOSTI SRDCE JAKO PUMPA SRDEČNÍ CYKLUS SRDEČNÍ SELHÁNÍ VZTAH DÉLKA - TENZE Pasivní protažení, aktivní protažení, izometrický stah, izotonický stah, auxotonní stah SRDEČNÍ VÝDEJ (MO)
1. Regulace otáček asynchronního motoru - skalární řízení
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
14 - Moderní frekvenční metody
 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
Příklady k přednášce 14 - Moderní frekvenční metody
 Příklady k přednášce 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Přenosy ve ZV systému Opakování: Přenosy v uzavřené smyčce ys () = Tsrs ()() + Ssds () () Tsns ()() us () =
Příklady k přednášce 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Přenosy ve ZV systému Opakování: Přenosy v uzavřené smyčce ys () = Tsrs ()() + Ssds () () Tsns ()() us () =
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Vlastnosti regulátorů
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) 7) Stabilita regulačního obvodu
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz, Kamenice 3, 4. patro, dv.č.424 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. FREKVENČNÍ TRASFORMACE SPOJITÉ
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz, Kamenice 3, 4. patro, dv.č.424 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. FREKVENČNÍ TRASFORMACE SPOJITÉ
12 - Frekvenční metody
 12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
Příklady k přednášce 5 - Identifikace
 Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV AUTOMATIZACE A INFORMATIKY FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AUTOMATION AND COMPUTER SCIENCE
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jří Holčí, CSc. holc@ba.un.cz, Kaence 3, 4. patro, dv.č.424 INVESTICE Insttut DO bostatsty ROZVOJE VZDĚLÁVÁNÍ a analýz XIII. ZÁKLADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ SPOJITÉ
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jří Holčí, CSc. holc@ba.un.cz, Kaence 3, 4. patro, dv.č.424 INVESTICE Insttut DO bostatsty ROZVOJE VZDĚLÁVÁNÍ a analýz XIII. ZÁKLADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ SPOJITÉ
Zásady regulace - proudová, rychlostní, polohová smyčka
 Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
Zásady regulace - proudová, rychlostní, polohová smyčka 23.4.2014 Schématické znázornění Posuvová osa s rotačním motorem 3 regulační smyčky Proudová smyčka Rychlostní smyčka Polohová smyčka Blokové schéma
3. AMPLITUDOVĚ MODULOVANÉ SIGNÁLY
 3. AMPLITUDOVĚ MODULOVANÉ SIGNÁLY Modulací nazýváme proces při kterém je jedním signálem přetvář en jiný signál za účelem př enosu informace. Př i amplitudové modulaci dochází k ovlivňování amplitudy nosného
3. AMPLITUDOVĚ MODULOVANÉ SIGNÁLY Modulací nazýváme proces při kterém je jedním signálem přetvář en jiný signál za účelem př enosu informace. Př i amplitudové modulaci dochází k ovlivňování amplitudy nosného
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA ELEKTROTECHNICKÁ BRNO, KOUNICOVA 16 PRO 3. ROČNÍK OBORU SLABOPROUDÁ ELEKTROTECHNIKA 2. ČÁST
 STŘEDNÍ PRŮMYSLOVÁ ŠKOLA ELEKTROTECHNICKÁ BRNO, KOUNICOVA 6 PRO 3. ROČNÍK OBORU SLABOPROUDÁ ELEKTROTECHNIKA. ČÁST ZPRACOVALA ING. MIROSLAVA ODSTRČILÍKOVÁ BRNO 3 OBSAH.ÚVOD...5..Charakteristika jednotlivých
STŘEDNÍ PRŮMYSLOVÁ ŠKOLA ELEKTROTECHNICKÁ BRNO, KOUNICOVA 6 PRO 3. ROČNÍK OBORU SLABOPROUDÁ ELEKTROTECHNIKA. ČÁST ZPRACOVALA ING. MIROSLAVA ODSTRČILÍKOVÁ BRNO 3 OBSAH.ÚVOD...5..Charakteristika jednotlivých
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Laplaceova transformace
 Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, Sc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTIE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VIII. SPOJITÉ SYSTÉMY
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, Sc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTIE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz VIII. SPOJITÉ SYSTÉMY
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Fourierova transformace
 Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka
 Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Kapacita, indukčnost; kapacitor-kondenzátor, induktor-cívka Kondenzátor je schopen uchovat energii v podobě elektrického náboje Q. Kapacita C se udává ve Faradech [F]. Kapacita je úměrná ploše elektrod
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu
 Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
Hlavní parametry mající zásadní vliv na přesnost řízení a kvalitu pohonu Radomír Mendřický Elektrické pohony a servomechanismy 12.8.2015 Obsah prezentace Požadavky na pohony Hlavní parametry pro posuzování
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ
 OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ Anotace: Ing. Zbyněk Plch VOP-026 Šternberk s.p., divize VTÚPV Vyškov Zkušebna elektrické bezpečnosti a
OCHRANA VOJENSKÝCH OBJEKTŮ PROTI ÚČINKŮM VÝKONOVÝCH ELEKTROMAGNETICKÝCH POLÍ, SIMULACE EMC FILTRŮ Anotace: Ing. Zbyněk Plch VOP-026 Šternberk s.p., divize VTÚPV Vyškov Zkušebna elektrické bezpečnosti a
Doplňky k přednášce 23 Diskrétní systémy Diskrétní frekvenční charakteristiky
 Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Fourierova transformace
 Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
Funkce základní pojmy a vlastnosti
 Funkce základní pojm a vlastnosti Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Pojem funkce Vlastnosti funkcí Inverzní funkce 4 Základní elementární funkce Mocninné Eponenciální Logaritmické
Funkce základní pojm a vlastnosti Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Pojem funkce Vlastnosti funkcí Inverzní funkce 4 Základní elementární funkce Mocninné Eponenciální Logaritmické
3. Kmitočtové charakteristiky
 3. Kmitočtové charakteristiky Po základním seznámení s programem ATP a jeho preprocesorem ATPDraw následuje využití jednotlivých prvků v jednoduchých obvodech. Jednotlivé příklady obvodů jsou uzpůsobeny
3. Kmitočtové charakteristiky Po základním seznámení s programem ATP a jeho preprocesorem ATPDraw následuje využití jednotlivých prvků v jednoduchých obvodech. Jednotlivé příklady obvodů jsou uzpůsobeny
Digitalizace převod AS DS (analogový diskrétní signál )
") Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Fakulta biomedic ınsk eho inˇzen yrstv ı Elektronick e obvody 2016 prof. Ing. Jan Uhl ıˇr, CSc. 1
 Fakulta biomedicínského inženýrství Elektronické obvody 2016 prof. Ing. Jan Uhlíř, CSc. 1 Obsah předmětu Elektronické obvody 1. Zesilovače analogových signálů 2. Napájení elektronických systémů 3. Nelineární
Fakulta biomedicínského inženýrství Elektronické obvody 2016 prof. Ing. Jan Uhlíř, CSc. 1 Obsah předmětu Elektronické obvody 1. Zesilovače analogových signálů 2. Napájení elektronických systémů 3. Nelineární
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH. Jiří Tůma
 ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
ZPRACOVÁNÍ SIGNÁLŮ Z MECHANICKÝCH SYSTÉMŮ UŽITÍM FFT Jiří Tůma Štramberk 1997 ii Anotace Cílem této knihy je systematicky popsat metody analýzy signálů z mechanických systémů a strojních zařízení. Obsahem
Praha technic/(4 -+ (/T'ERATU"'P. ))I~~
)I~~") Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Jaroslav Baláte Praha 2003 -technic/(4 -+ (/T'ERATU"'P ))I~~ @ ZÁKLADNí OZNAČENí A SYMBOLY 13 O KNIZE 24 1 SYSTÉMOVÝ ÚVOD PRO TEORII AUTOMATICKÉHO iízení 26 11 VYMEZENí POJMU - SYSTÉM 26 12 DEFINICE SYSTÉMU
Fakulta elektrotechnická
 České vysoké učení technické v Praze Fakulta elektrotechnická BAKALÁŘSKÁ PRÁCE Podpora výuky regulační techniky v bakalářském studiu (model Vodárna) Praha, 26 Libor Šteffl Prohlášení Prohlašuji, že jsem
České vysoké učení technické v Praze Fakulta elektrotechnická BAKALÁŘSKÁ PRÁCE Podpora výuky regulační techniky v bakalářském studiu (model Vodárna) Praha, 26 Libor Šteffl Prohlášení Prohlašuji, že jsem
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ
 B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
1 Zpracování a analýza tlakové vlny
 1 Zpracování a analýza tlakové vlny 1.1 Cíl úlohy Prostřednictvím této úlohy se naučíte a zopakujete: analýzu biologických signálů v časové oblasti, analýzu biologických signálů ve frekvenční oblasti,
1 Zpracování a analýza tlakové vlny 1.1 Cíl úlohy Prostřednictvím této úlohy se naučíte a zopakujete: analýzu biologických signálů v časové oblasti, analýzu biologických signálů ve frekvenční oblasti,
Funkce. Logaritmická funkce. Mgr. Tomáš Pavlica, Ph.D. Digitální učební materiály, Gymnázium Uherské Hradiště
 Funkce Logaritmická funkce Mgr. Tomáš Pavlica, Ph.D. Gymnázium Uherské Hradiště Digitální učební materiály, 01-1 Obsah Logaritmická funkce 1 Logaritmická funkce předpis funkce a ukázky grafů srovnání grafů
Funkce Logaritmická funkce Mgr. Tomáš Pavlica, Ph.D. Gymnázium Uherské Hradiště Digitální učební materiály, 01-1 Obsah Logaritmická funkce 1 Logaritmická funkce předpis funkce a ukázky grafů srovnání grafů
elektrické filtry Jiří Petržela všepropustné fázovací články, kmitočtové korektory
 Jiří Petržela všepropustné fázovací články, kmitočtové korektory zvláštní typy filtrů všepropustné fázovací články 1. řádu všepropustné fázovací články 2. řádu všepropustné fázovací články vyšších řádů
Jiří Petržela všepropustné fázovací články, kmitočtové korektory zvláštní typy filtrů všepropustné fázovací články 1. řádu všepropustné fázovací články 2. řádu všepropustné fázovací články vyšších řádů
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
7.1. Číslicové filtry IIR
 Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta elektrotechnická katedra řídící techniky. Podpora výuky dynamických systémů I.
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta elektrotechnická katedra řídící techniky Podpora výuky dynamických systémů I. Bakalářská práce Vedoucí bakalářské práce: Ing. František Vaněk Student: Zbyněk Hegr Praha
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ Fakulta elektrotechnická katedra řídící techniky Podpora výuky dynamických systémů I. Bakalářská práce Vedoucí bakalářské práce: Ing. František Vaněk Student: Zbyněk Hegr Praha
Seznámení s přístroji, používanými při měření. Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice
 Cvičení Seznámení s přístroji, používanými při měření Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice eaktance kapacitoru Integrační článek C - přenos - měření a simulace Derivační
Cvičení Seznámení s přístroji, používanými při měření Nezatížený a zatížený odporový dělič napětí, měření a simulace PSpice eaktance kapacitoru Integrační článek C - přenos - měření a simulace Derivační
r Odvoď te přenosovou funkci obvodů na obr.2.16, je-li vstupem napě tí u 1 a výstupem napě tí u 2. Uvaž ujte R = 1Ω, L = 1H a C = 1F.
 Systé my, procesy a signály I - sbírka příkladů NEŘ EŠENÉPŘ ÍKADY r 223 Odvoď te přenosovou funkci obvodů na obr26, je-li vstupem napě tí u a výstupem napě tí Uvaž ujte Ω, H a F u u u a) b) c) u u u d)
Systé my, procesy a signály I - sbírka příkladů NEŘ EŠENÉPŘ ÍKADY r 223 Odvoď te přenosovou funkci obvodů na obr26, je-li vstupem napě tí u a výstupem napě tí Uvaž ujte Ω, H a F u u u a) b) c) u u u d)
VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST
 VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST 5.1. Snímač 5.2. Obvody úpravy signálu 5.1. SNÍMAČ Napájecí zdroj snímač převod na el. napětí - úprava velikosti - filtr analogově číslicový převodník
VLASTNOSTI KOMPONENTŮ MĚŘICÍHO ŘETĚZCE - ANALOGOVÁČÁST 5.1. Snímač 5.2. Obvody úpravy signálu 5.1. SNÍMAČ Napájecí zdroj snímač převod na el. napětí - úprava velikosti - filtr analogově číslicový převodník
Měření na nízkofrekvenčním zesilovači. Schéma zapojení:
 Číslo úlohy: Název úlohy: Jméno a příjmení: Třída/Skupina: / Měřeno dne: Měření na nízkofrekvenčním zesilovači Spolupracovali ve skupině Zadání úlohy: Na zadaném Nf zesilovači proveďte následující měření
Číslo úlohy: Název úlohy: Jméno a příjmení: Třída/Skupina: / Měřeno dne: Měření na nízkofrekvenčním zesilovači Spolupracovali ve skupině Zadání úlohy: Na zadaném Nf zesilovači proveďte následující měření
Dvoustupňový Operační Zesilovač
 Dvoustupňový Operační Zesilovač Blokové schéma: Kompenzační obvody Diferenční stupeň Zesilovací stupeň Výstupní Buffer Proudové reference Neinvertující napěťový zesilovač Invertující napěťový zesilovač
Dvoustupňový Operační Zesilovač Blokové schéma: Kompenzační obvody Diferenční stupeň Zesilovací stupeň Výstupní Buffer Proudové reference Neinvertující napěťový zesilovač Invertující napěťový zesilovač
D C A C. Otázka 1. Kolik z následujících matic je singulární? A. 0 B. 1 C. 2 D. 3
 atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
atum narození Otázka. Kolik z následujících matic je singulární? 4 A. B... 3 6 4 4 4 3 Otázka. Pro která reálná čísla a jsou vektory u = (,, 3), v = (3, a, ) a w = (,, ) lineárně závislé? A. a = 5 B. a
Téma: Dynamiky - Základní vztahy kmitání
 Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
Počítačová podpora statických výpočtů Téma: Dynamiky - Základní vztahy kmitání 1) Vlastnosti materiálů při dynamickém namáháni ) Základní vztahy teorie kmitání s jedním stupněm volnosti Katedra konstrukcí
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jří Holčík, CSc. holck@ba.un.c @ba.un.c,, Kaence 3, 4. patro, dv.č.424.424 INVESTICE Insttut DO bostatstky ROZVOJE VZDĚLÁVÁNÍ a analý XIII. ZÁKLADNÍ TYPY DYNAMICKÝCH
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jří Holčík, CSc. holck@ba.un.c @ba.un.c,, Kaence 3, 4. patro, dv.č.424.424 INVESTICE Insttut DO bostatstky ROZVOJE VZDĚLÁVÁNÍ a analý XIII. ZÁKLADNÍ TYPY DYNAMICKÝCH
Mechatronické systémy struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
1. Regulace otáček asynchronního motoru skalární řízení Skalární řízení postačuje pro dynamicky nenáročné pohony, které často pracují v ustáleném stavu. Je založeno na dvou předpokladech: a) motor je popsán
i β i α ERP struktury s asynchronními motory
 1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
1. Regulace otáček asynchronního motoru - vektorové řízení Oproti skalárnímu řízení zabezpečuje vektorové řízení vysokou přesnost a dynamiku veličin v ustálených i přechodných stavech. Jeho princip vychází
Analogové modulace. Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
 EVROPSKÝ SOCIÁLNÍ FOND Analogové modulace PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206 Modulace Co je to modulace?
EVROPSKÝ SOCIÁLNÍ FOND Analogové modulace PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206 Modulace Co je to modulace?
ELEKTROTECHNIKA 2 TEMATICKÉ OKRUHY
 EEKTOTECHNK TEMTCKÉ OKHY. Harmonický ustálený stav imitance a výkon Harmonicky proměnné veličiny. Vyjádření fázorů jednotlivými tvary komplexních čísel. Symbolický počet a jeho využití při řešení harmonicky
EEKTOTECHNK TEMTCKÉ OKHY. Harmonický ustálený stav imitance a výkon Harmonicky proměnné veličiny. Vyjádření fázorů jednotlivými tvary komplexních čísel. Symbolický počet a jeho využití při řešení harmonicky
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS
 MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
MODIFIKOVANÝ KLIKOVÝ MECHANISMUS Michal HAJŽMAN Tento materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Vyšetřování pohybu vybraných mechanismů v systému ADAMS
Obsah OBVODY STŘÍDAVÉHO PROUDU S LINEÁRNÍMI JEDNOBRANY A DVOJBRANY. Studijní text pro řešitele FO a ostatní zájemce o fyziku Přemysl Šedivý
 OBVODY STŘÍDVÉHO POD S NEÁNÍM JEDNOBNY DVOJBNY Studijní text pro řešitele FO a ostatní zájemce o yziku Přemysl Šedivý Obsah Jednoduchý obvod střídavého proudu Řešení obvodů střídavého proudu pomocí ázorového
OBVODY STŘÍDVÉHO POD S NEÁNÍM JEDNOBNY DVOJBNY Studijní text pro řešitele FO a ostatní zájemce o yziku Přemysl Šedivý Obsah Jednoduchý obvod střídavého proudu Řešení obvodů střídavého proudu pomocí ázorového
Laboratorní úloha č. 2 Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon. Max Šauer
 Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
Laboratorní úloha č. Vzájemná induktivní vazba dvou kruhových vzduchových cívek - Faradayův indukční zákon Max Šauer 14. prosince 003 Obsah 1 Popis úlohy Úkol měření 3 Postup měření 4 Teoretický rozbor
1 U Zapište hodnotu časové konstanty derivačního obvodu. Vyznačte měřítko na časové ose v uvedeném grafu.
 v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
v v 1. V jakých jednotkách se vyjadřuje proud uveďte název a značku jednotky. 2. V jakých jednotkách se vyjadřuje indukčnost uveďte název a značku jednotky. 3. V jakých jednotkách se vyjadřuje kmitočet
Rezonanční obvod jako zdroj volné energie
 1 Rezonanční obvod jako zdroj volné energie Ing. Ladislav Kopecký, 2002 Úvod Dlouho mi vrtalo hlavou, proč Tesla pro svůj vynález přístroje pro bezdrátový přenos energie použil název zesilující vysílač
1 Rezonanční obvod jako zdroj volné energie Ing. Ladislav Kopecký, 2002 Úvod Dlouho mi vrtalo hlavou, proč Tesla pro svůj vynález přístroje pro bezdrátový přenos energie použil název zesilující vysílač
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
ISŠ Nova Paka, Kumburska 846, 50931 Nova Paka Automatizace Dynamické vlastnosti členů členy a regulátory
 Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
Regulátory a vlastnosti regulátorů Jak již bylo uvedeno, vlastnosti regulátorů určují kvalitu regulace. Při volbě regulátoru je třeba přihlížet i k přenosovým vlastnostem regulované soustavy. Cílem je,
2. Frekvenční a přechodové charakteristiky
 rkvnční a přchodové charaktristiky. rkvnční a přchodové charaktristiky.. Obcný matmatický popis Přchodové a frkvnční charaktristiky jsou důlžitým prostřdkm pro analýzu a syntézu rgulačních obvodů a tdy
rkvnční a přchodové charaktristiky. rkvnční a přchodové charaktristiky.. Obcný matmatický popis Přchodové a frkvnční charaktristiky jsou důlžitým prostřdkm pro analýzu a syntézu rgulačních obvodů a tdy
Oběhová soustava - cirkulace krve v uzavřeném oběhu cév - pohyb krve zajišťuje srdce
 Oběhová soustava - cirkulace krve v uzavřeném oběhu cév - pohyb krve zajišťuje srdce Krevní cévy tepny (artérie), tepénky (arterioly) - silnější stěna hladké svaloviny (elastická vlákna, hladká svalovina,
Oběhová soustava - cirkulace krve v uzavřeném oběhu cév - pohyb krve zajišťuje srdce Krevní cévy tepny (artérie), tepénky (arterioly) - silnější stěna hladké svaloviny (elastická vlákna, hladká svalovina,
Děliče napětí a zapojení tranzistoru
 Středoškolská technika 010 Setkání a prezentace prací středoškolských studentů na ČVUT Děliče napětí a zapojení tranzistoru David Klobáska Vyšší odborná škola a Střední škola slaboproudé elektrotechniky
Středoškolská technika 010 Setkání a prezentace prací středoškolských studentů na ČVUT Děliče napětí a zapojení tranzistoru David Klobáska Vyšší odborná škola a Střední škola slaboproudé elektrotechniky
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Střední průmyslová škola elektrotechnická a informačních technologií Brno
 Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.07/1.5.00/34.0521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
Střední průmyslová škola elektrotechnická a informačních technologií Brno Číslo a název projektu: CZ.1.07/1.5.00/34.0521 Investice do vzdělání nesou nejvyšší úrok Autor: Ing. Bohumír Jánoš Tématická sada:
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 3. 4. 2014
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 III/2 Inovace a zkvalitnění výuky prostřednictvím ICT Téma: Elektřina a magnetismus Autor: Název: Datum vytvoření: 3. 4. 2014