Stavební mechanika 01 (K132SM01)
|
|
|
- Julie Anna Horáčková
- před 7 lety
- Počet zobrazení:
Transkript
1 Stavební mechanika 01 (K132SM01) Přednáší: prof. Ing. Petr Kabele, Ph.D. Katedra mechanik K11132 místnost 328 tel. linka: a doc. Ing. Matěj Lepš, Ph.D. Katedra mechanik K


2 Tři pilíře studia na vsoké škole Přednášk širší pohled na problematiku teoretické áklad pro další tvůrčí rovoj ilustrativní příklad Cvičení vužití ískaných nalostí pro řešení konkrétních příkladů pod vedením pedagoga praktické trik a návod 2 Petr Šmerkl, Wikipedia Samostatná práce studium látk přednášek a cvičení - pochopení domácí úkol a příprava k testům a kouškám - vužití ískaných nalostí pro samostatné řešení konkrétních příkladů
3 Organiace a podmínk výuk předmětu: Stavební mechanika 1 Literatura: Kabele a kol.: Stavební mechanika 1. Příklad, ES ČVUT (2014) Kufner, Kuklík: Stavební mechanika 10, ES ČVUT Kufner, Kuklík: Stavební mechanika 20, ES ČVUT (Kufner, Kratěnová, Kuklík: Teoretická mechanika, Příklad, ES ČVUT) (eer, Johnston: Vector nalsis for Engineers, McGraw-Hill) Další studijní materiál: Wiki stránk katedr mechanik: %27s_corner PROJEKT: Posílení vab teoretických předmětů a profesní orientace v prvních dvou ročnících bakalářského studijního programu Stavební inženýrství 3
4 1. Úvod Co je to mechanika? Nauka o chování těles vstavených působení sil. de chováním roumíme: přenášení atížení, měn tvaru a objemu (deformace), pohb,... Stavební mechanika: studuje přenášení atížení, deformace, pohb, porušení,... stavebních konstrukcí vstavených účinkům atížení. Statika se abývá těles nacháejícími se v klidu, silami, které mei takovýmito těles působí a rovnováhou celého sstému. Dnamika se abývá těles v pohbu a ohledňuje působení setrvačných a tlumících sil. 4
5 Proč je nutno studovat (stavební) mechaniku? 1) epečnost a spolehlivost stavebních konstrukcí Specifika stavebních konstrukcí: požadovaná životnost: desítk až stovk let vážné společenské a hmotné následk případné chb v projektu či havárie inženýr musí umět navrhnout stavební konstrukci tak, ab bla bepečná a spolehlivá po celou dobu své životnosti 5
6 Havárie mostu Tacoma Narrows ridge (US) avěšený most, délka 1810 m uveden do provou 1. července 1940 řítil se 7. listopadu 1940 v důsledku vibrací vbuených větrem o rchlosti 70 km/h 6

7 Tacoma Narrows ridge 7

8 Tacoma Narrows ridge 8
9 Havárie mostu Tacoma Narrows ridge (US) příčina použití nového řešení mostovk: plné I profil namísto příhradových při obtékání větru pod a nad mostovkou interakce proudícího vduchu a konstrukce působila nestabilní oscilace (aeroelastický flutter) 9
10 Velké emětřesení v oblasti Hanšin (Kóbe) Japonsko) 17. ledna 1995, před 6. hodinou ráno magnituda Mw 6,8 intenita 5-7 na sedmistupňové japonské stupnici rchlení na povrchu až 0,8 g (8 m/s 2 ) kolaps mnoha stavebních konstrukcí, ejm. postavených podle starých norem 10

11 Velké emětřesení v oblasti Hanšin Dálnice Hanšin monolitické želeobetonové pilíře (tp pilt ) 11

12 Velké emětřesení v oblasti Hanšin simulace: Concrete Lab., Univ. of Toko příčina kolapsu: nedostatečná a příliš níko ukončená podélná výtuž, nedostatečné kotvení výtuže, nedostatečná smková kapacita pilířů 12


13 Velké emětřesení v oblasti Tóhoku (Japonsko) 11. břena 2011 magnituda Mw 9 maimální rchlení na povrchu 2,99 g foto: Report b the First Joint Surve Team of the JSCE Concrete and Structural Engineering Committees on the damage caused b the Great East Japan Earthquake pilíř esílený proti účinkům emětřesení pomocí želeobetonové obálk 13
14 Proč je nutno studovat (stavební) mechaniku? 2) Vrůstající nárok na stavební konstrukce všší, delší, větší... kvalitnější trvanlivější levnější konstrukce Inovativní mechanická (statická) řešení konstrukce a vývoj a vžití nových materiálů jsou kritickým faktor pro splnění těchto požadavků. 14
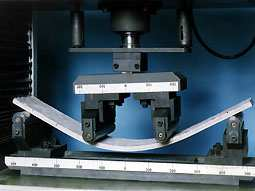



15 Vláknocementové kompoit s tahovým pevněním Engineered Cementitious Composite (ECC) - ohebný beton 15

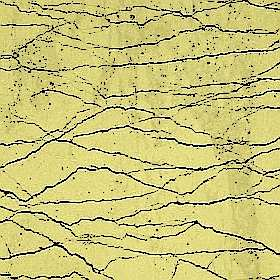
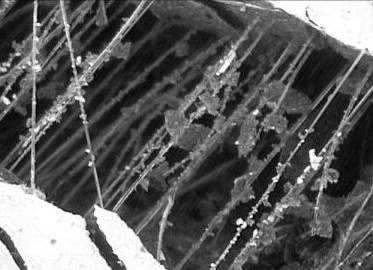
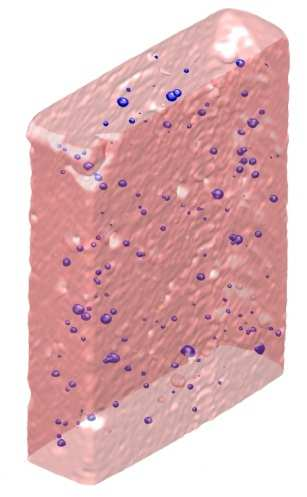

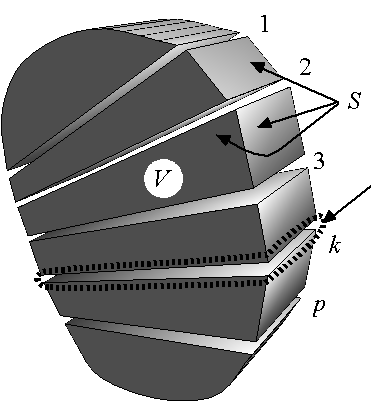


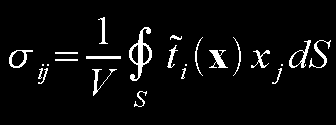
16 Vývoj ECC materiálu víceúrovňový mechanický model mikromechanick odladěná skladba Makro Meo II Meo I Mikro 10-2 m 10-3 m i r i σ S + k σ i crack = K m π r i Nb b 1 t = Pϕ c i= 1 t ɶ i 10-3 m 10-4 m

17 Inovativní konstrukční řešení s použitím ECC KM uilding (Ósaka, Japonsko, 9/2008) celková výška 210 m počet podlaží: 54 nademních 1 podemní počet btových jednotek: 465 výstavba: ~ seimické atížení 17
 + super nosník + tlumiče Inovativní")

18 Konstrukční řešení Tradiční řešení: Ž jádro (superstěna) + super nosník + tlumiče Inovativní řešení: supernosník nahraen smkovými nosník duktilního vláknobetonu ECC 18 obráek: Kajima Technical Research Institute

19 19

20 20


21 21


22 Metoda mechanik Fická úloha modelování Matematická úloha řešení Výsledek: předpověď, reprodukce chování kce. Soustava rovnic 22
23 Modelování: idealiace, jednodušení - identifikace dominantního mechanismu chování definice veličin popisujících působení atížení, jeho přenášení v konstrukci a následné chování konstrukce (síla, přemístění, napětí, deformace,...) definice vtahů mei těmito veličinami: vcháí obecně platných fikálních ákonů a aiomů (ákon achování energie, hmot, hbnosti, ákon síl,...) Řešení: podle tpu matematické úloh vužíváme růných matematických a výpočetních technik (analtické, numerické - vhodné pro počítač,...) 23
24 V tomto předmětu (SM1): konstrukce či její části budou idealiován jako bod nebo tuhé prvk (desk nebo tělesa) budeme studovat rovnováhu konstrukce a jejích částí, přenášení sil v konstrukci 24
25 2. Přehled některých ákladní nalostí matematik 2.1 Trigonometrie Pravoúhlý trojúhelník sin α = a/c cos α = b/c tan α = a/b Pthagorova věta: c 2 = a 2 + b 2 Obecný trojúhelník α c b a Sinová věta: a : b : c = sin α : sin β : sin γ Kosinová věta: a 2 = b 2 + c 2 2bc cos α b 2 = a 2 + c 2 2ac cos β c 2 = a 2 + b 2 2ab cos γ α b c γ β a 25
26 2. Přehled některých ákladní nalostí matematik 2.2 Vektorový počet Kartéský souřadnicový sstém Souřadnicový sstém v prostoru: soustava tří vájemně kolmých os,, pravotočivá soustava: pootočení v kladném smslu kolem v kladném smslu kolem v kladném smslu kolem (kladný smsl - proti směru hodin. ručiček při pohledu proti ose) Souřadnicový sstém v rovině: 26
27 2.2.2 Vektor Skalár: veličina daná poue velikostí, neávisí na volbě souřadnicového sstému Vektor V: veličina daná velikostí, směrem a orientací vžd se vtahuje k souřadnicovému sstému áové vektor (souřadnicové vektor) e 1, e 2, e 3 : jednotkové vektor v kladných směrech souřadnicových os e 3 γ β α e 2 e 1 V Směrové úhl α, β, γ: úhl mei kladnými souřadnicovými poloosami a vektorem V platí cos 2 α + cos 2 β + cos 2 γ = 1 27
28 Vjádření vektoru prostřednictvím složek: složk: kolmé průmět vektoru do směrů souřadnicových os V= { V ; V ; V } s použitím směrových úhlů: V = V cos α V e 3 γ V V = V cos β β V V = V cos γ V... velikost vektoru V α e 2 e 1 báové vektor:e 1 = {1; 0; 0} e 2 = {0; 1; 0} e 3 = {0; 0; 1} 28
29 V... velikost (délka) vektoru V: V = V + V + V samotný smbol V... může nabývat áporných i neáporných hodnot, nese informaci o velikosti vektoru V a jeho orientaci: kladná hodnota... orientace shodná s předpokládanou áporná hodnota... orientace opačná s předpokládanou Např: předpokládaná orientace vektoru V: výsledek výpočtu: skutečná orientace vektoru V: V = -5 V =5 V V = 3 V = 3 29
30 Vektor určený dvěma bod: K [ K, K, K ] a L [ L, L, L ] V L V = KL = { L - K, L - K, L - K } K K K K L L L 30
31 2.2.3 Operace s vektor Součet vektorů a je vektor C, pro který platí: C = { + ; + ; + } načení: C = + vlastnosti: + = + geometrický výnam: C C C 31
32 Součinem skaláru s a vektoru je vektor, pro který platí: = {s, s, s } s = načení:= s vlastnosti: * s = s * vektor jsou rovnoběžné * velikost = s + s + s = s s = 32
33 Použití: Vjádření složek jednotkového vektoru f ležícího v paprsku daném dvěma bod K [ K, K, K ] a L [ L, L, L ]: Hledáme f = { f ; f ; f }; f = 1 KL = { L - K, L - K, L - K } KL = ( L K ) ( L K ) ( L K ) 1 KL L bchom ískali jednotkový vektor, přenásobíme KL skalárem 1 KL f = 1 KL KL K K K f L K L L f = ; f = ; f = KL KL KL L K L K L K 33
34 Použití: Vjádření složek vektoru s použitím jednotkového vektoru ve směru V: Dáno: f = { f ; f ; f }; f = 1 hledáme V V = V f V = V f f f f V V = V f Také f = cos α f = cos β f = cos γ f 34
35 Skalárním součinem vektorů a je skalár s, pro který platí: s = cos ϕ = + + ϕ načení: s =. vlastnosti: *. =. * pro : cos ϕ = 0, s = 0 geometrický výnam a použití: * např. vjádření složek vektoru V V = V cos α = V. e 1 V = V cos β = V. e 2 V = V cos γ = V. e 3 V * skalární součin V. e vjadřuje průmět vektoru V do os určené jednotkovým vektorem e. V V e 3 γ β α e 2 e 1. V. e V V e 35
36 ( ) ( ) ( ) } C, C, {C e C e C e C e e e e e e C = + + = + + = = = Vektorovým součinem vektorů a je vektor C který má následující vlastnosti: 1. velikost C = sin ϕ (plocha rovnoběžníka) 2. vektor C je kolmý k vektorům a 3. vektor,, C tvoří pravotočivou soustavu ϕ C C.. načení: C = vlastnosti: * = - * s ( ) = (s ) = (s ) * ( + ) D = D + D vjádření složek 36
37 Vsuvka: výpočet determinantu matice 33 a a a a a a a a a = a11 a22 a33+ a21 a32 a13+ a12 a23 a31 a13 a22 a31 a12 a21 a33 a23 a32 a11 37
38 načení: s = ( ). C geometrický výnam: objem rovnoběžnostěnu určeného vektor,, C vlastnosti: * ( ). C > 0 jestliže vektor,, C neleží v jedné rovině a tvoří pravotočivou soustavu * ( ). C = 0 leží-li vektor,, C v jedné rovině nebo je-li aspoň jeden nich nulový * ( ). C = C. ( ) * ( ). C = -( ). C * ( ). C = ( C). = (C ). C C C - C C C C C C s + + = = smíšeným součinem vektorů, a C je skalár s definovaný determinantem: C.. 38
 můžeme idealiovat jako bod. Účink budeme popisovat prostřednictvím vektorové veličin -- síl. 39")
39 3. Geometrie sil 3.1 Síl působící v jednom bodě Zadání úloh, předpoklad Úloha této kapitol: matematick popsat mechanické účink atížení na konstrukci a účink částí konstrukce navájem. Zjednodušující předpoklad: konstrukci (její části) můžeme idealiovat jako bod. Účink budeme popisovat prostřednictvím vektorové veličin -- síl. 39
40 3.1.2 Síla načení F, R definice, např. e ákona síl: Změna hbnosti hmotného bodu a jednotku času je rovna síle působící na hmotný bod: dh dt d( mv) = dt = F při konstantní hmotnosti bodu: dv m dt = ma = F ákladní jednotka: N (Newton) 1N = 1 kg m s -2 40
41 síla je vektor váaný na bod ve kterém působí (působiště) (operace se silami = operace s vektor) * složk F = { F ; F ; F } F = F. e 1 = F cos α = F f F = F. e 2 = F cos β = F f F = F. e 3 = F cos γ = F f F F γ α f β F F * velikost síl: F= F + F + F
42 3.1.3 Základní aiom v souladu s vektorovým pojetím síl F iom o rovnováe sil: F + (-F) = { F +(-F ); F +(-F ); F +(-F ) } = { 0; 0; 0 } = 0 Věta o posunu působiště síl po jejím paprsku: Účinek síl na tuhé těleso se nemění, posune-li se její působiště po paprsku, v němž síla působí. F = -F F 42 (tuhá tělesa... síla je vektor váaný na paprsek)
43 iom o rovnoběžníku sil (sčítání sil): (geometrická interpretace) F r výslednice sil F 1 af 2 F r velikost výslednice F 2 F r kosinové vět: 2 2 F = F + F 2 F F cos( π ϕ) r cos( π ϕ) = cosϕ 2 2 Fr = F1 + F2 + 2 F1 F2 cosϕ sinová věta: sinϕ F 1 sinϕ1 = = sin( π ϕ) F sinϕ 2 r sinϕ F 2 1 sinϕ2 = = sin( π ϕ) F sin( ϕ) r ϕ ϕ 2 ϕ 1 ϕ 1 π ϕ π ϕ F 1 F r ϕ 2 F 1 F 2 43
44 This image cannot currentl be displaed. odvoení pomocí vektorového počtu výslednice F r dvou sil F 1 a F 2 F r = F 1 + F 2 = { F 1 +F 2 ; F 1 +F 2 } (komutitativnost sčítání sil) velikost výslednice F r dvou sil F 1 a F F = F + F = F + F + F + F 2 2 ( ) ( ) r r r = F1 + F2 + 2F1 F2 + F1 + F2 + 2F1 F2 = F F F1 F2 skalární součin 44
45 Příklad: Roložte sílu F do dvou složek, které působící v paprscích a a b. b F = 10kN F b ϕ' ϕ b= 85 ϕ = 30 a F a a ϕ= ' = 65 sinová věta: sinϕa Fb sinϕa sin 30 = Fb = F = 10 = 5,517 kn sin ϕ ' F sin ϕ ' sin 65 sinϕb Fa sinϕb sin 85 = Fa = F = 10 = 10,992 kn sin ϕ ' F sin ϕ ' sin 65 45


46 3.1.4 Svaek sil Soustava sil = seskupení sil působících na těleso {F i } = {F 1, F 2, F 3,..., F n } Svaek sil = soustava sil, jejichž paprsk se protínají v jednom bodě - prostorový - rovinný: všechn paprsk leží v jedné rovině 46
47 Úloh: výsledný účinek svaku sil: nahraení svaku sil jedinou silou se stejným účinkem - výslednicí {F i } = F r úloha rovnováh: rušení účinku svaku sil {F i } přidáním svaku {R i } {F i } + = 0 {R i } úloha ekvivalence: nahraení účinku svaku sil {F i } svakem {R i } {F i } = {R i } 47
48 3.1.5 Prostorový svaek sil Př.1: Určete výsledný účinek svaku sil 1. Určit složk 2. Výslednice krchle o hraně 3m O F F r =F 1 +F 2 +F i = F i f i 3 F F r =F 1 +F 2 +F i = F i f i 3 F 3 =3kN F i = F i f i F r =F 1 +F 2 +F 3 F 1 =5kN i=1,2,3 F r =F 1 +F 2 +F 3 C F 2 =10kN 3. Velikost výslednice F = F + F + F = kn r r r r i Fi poč kon vektor jednot. vektor vektor síl 48 b b vel f i f i f i F i F i F i C O r
49 5.268 kn F r = kn kn 49
50 Př.2: Uveďte svaek sil př.1 do rovnováh 3 silami R 1, R 2, R 3 krchle o hraně 3m E R 3 O D R 2 R 1 Pon.: Vnačené orientace sil R 1, R 2, R 3 předpokládáme. Protože skutečné orientace jsou nenámé, do výpočtu avádíme R 1, R 2, R 3 namísto velikostí R 1, R 2, R 3. Znaménka R 1, R 2, R 3 pak určí skutečnou orientaci. Podmínk rovnováh F r +R 1 +R 2 +R 3 =0 : F r +R 1 +R 2 +R 3 =0 : F r +R 1 +R 2 +R 3 =0 : F r +R 1 +R 2 +R 3 =0 : F r +R 1 f 1 +R 2 f 2 +R 3 f 3 =0 : F r +R 1 f 1 +R 2 f 2 +R 3 f 3 =0 : F r +R 1 f 1 +R 2 f 2 +R 3 f 3 =0 i poč kon vektor jednot. vektor 50 b b vel f i f i f i 1 E D
51 : R R R 3 = 0 : R R 2 +0 R 3 = 0 : R 1 +0 R R 3 = 0 R 1 = kn R 2 = kn R 3 = kn O E nebo O E D R 1 =8.297 kn D R 1 =8.297 kn R 3 = kn R 2 =5.847 kn R 3 = kn R 2 = kn 51
52 Př.3: Nahraďte svaek sil př.1 třemi silami R 4, R 5, R 6 (ekvivalence) krchle o hraně 3m R 6 D R 5 G R 4 Pon.: Vnačené orientace sil R 4, R 5, R 6 předpokládáme. Protože skutečné orientace jsou nenámé, do výpočtu avádíme R 4, R 5, R 6 namísto velikostí R 4, R 5, R 6. Znaménka R 4, R 5, R 6 pak určí skutečnou orientaci. Podmínk ekvivalence F r =R 4 +R 5 +R 6 : F r =R 4 +R 5 +R 6 : F r =R 4 +R 5 +R 6 : F r =R 4 +R 5 +R 6 : F r =R 4 f 4 +R 5 f 5 +R 6 f 6 : F r =R 4 f 4 +R 5 f 5 +R 6 f 6 : F r =R 4 f 4 +R 5 f 5 +R 6 f 6 i poč kon vektor jednot. vektor 52 b b vel f i f i f i G D
53 : = 0 R R R 6 : = 0 R R R 6 : = -1 R 4 +0 R R 6 R 4 = kn R 5 = kn R 6 = kn R 6 = kn D G R 4 = kn R 5 = kn nebo R 6 = kn D G R 4 = kn R 5 = kn 53
54 3.1.6 Rovinný svaek sil 54
55 Tento dokument je určen výhradně jako doplněk k přednáškám předmětu Stavební mechanika 1 pro student Stavební fakult ČVUT v Prae. Dokument je průběžně doplňován, opravován a aktualiován a i přes veškerou snahu autora může obsahovat nepřesnosti a chb. Datum poslední revie: :00 55
Stavební mechanika 1 (132SM01)
") Stavební mechanika 1 (132SM01) Přednáší: Ing. Jiří Němeček, Ph.D. Kateda stavební mechanik K132 místnost 331a e-mail: jii.nemecek@fsv.cvut.c http://mech.fsv.cvut.c/ Liteatua: Kabele a kol., Stavební mechanika
Stavební mechanika 1 (132SM01) Přednáší: Ing. Jiří Němeček, Ph.D. Kateda stavební mechanik K132 místnost 331a e-mail: jii.nemecek@fsv.cvut.c http://mech.fsv.cvut.c/ Liteatua: Kabele a kol., Stavební mechanika
Stavební mechanika 1 (K132SM01)
") Stavební mechanika 1 (K132SM01) Přednáší: doc. Ing. Matěj Lepš, Ph.D. Katedra mechaniky K132 místnost D2034 e-mail: matej.leps@fsv.cvut.cz http://mech.fsv.cvut.cz/~leps/teaching/index.html Organizace předmětu
Stavební mechanika 1 (K132SM01) Přednáší: doc. Ing. Matěj Lepš, Ph.D. Katedra mechaniky K132 místnost D2034 e-mail: matej.leps@fsv.cvut.cz http://mech.fsv.cvut.cz/~leps/teaching/index.html Organizace předmětu
Desky. Petr Kabele. Pružnost a pevnost 132PRPE Přednášky. Deska/stěna/skořepina, desky základní předpoklady, proměnné a rovnice
 Pružnost a pevnost 13PRPE Přednášk Desk Deska/stěna/skořepina, desk ákladní předpoklad, proměnné a rovnice Petr Kabele České vsoké učení technické v Prae Fakulta stavební Úvod Přemístění, deformaci a napjatost
Pružnost a pevnost 13PRPE Přednášk Desk Deska/stěna/skořepina, desk ákladní předpoklad, proměnné a rovnice Petr Kabele České vsoké učení technické v Prae Fakulta stavební Úvod Přemístění, deformaci a napjatost
6.1 Shrnutí základních poznatků
 6.1 Shrnutí ákladních ponatků Prostorová a rovinná napjatost Prostorová napjatost v libovolném bodě tělesa je v pravoúhlé soustavě souřadnic obecně popsána 9 složkami napětí, které le uspořádat do matice
6.1 Shrnutí ákladních ponatků Prostorová a rovinná napjatost Prostorová napjatost v libovolném bodě tělesa je v pravoúhlé soustavě souřadnic obecně popsána 9 složkami napětí, které le uspořádat do matice
Rovinná a prostorová napjatost
 Rovinná a prostorová napjatost Vdělme v bodě tělesa elementární hranolek o hranách d, d, d Vnitřní síl ve stěnách hranolku se projeví jako napětí na příslušné ploše a le je roložit do směrů souřadnicových
Rovinná a prostorová napjatost Vdělme v bodě tělesa elementární hranolek o hranách d, d, d Vnitřní síl ve stěnách hranolku se projeví jako napětí na příslušné ploše a le je roložit do směrů souřadnicových
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
Přímková a rovinná soustava sil
 Přímková a rovinná soustava sil 1) Souřadný systém - v prostoru - v rovině + y + 2) Síla P ( nebo F) - vektorová veličina - působiště velikost orientace Soustavy sil - přehled Soustavy sil můžeme rodělit
Přímková a rovinná soustava sil 1) Souřadný systém - v prostoru - v rovině + y + 2) Síla P ( nebo F) - vektorová veličina - působiště velikost orientace Soustavy sil - přehled Soustavy sil můžeme rodělit
* Modelování (zjednodušení a popis) tvaru konstrukce. pruty
 tvaru konstrukce. pruty") 2. VNITŘNÍ SÍLY PRUTU 2.1 Úvod * Jak konstrukce přenáší atížení do vaeb/podpor? Jak jsou prvky konstrukce namáhány? * Modelování (jednodušení a popis) tvaru konstrukce. pruty 1 Prut: konstrukční prvek,
2. VNITŘNÍ SÍLY PRUTU 2.1 Úvod * Jak konstrukce přenáší atížení do vaeb/podpor? Jak jsou prvky konstrukce namáhány? * Modelování (jednodušení a popis) tvaru konstrukce. pruty 1 Prut: konstrukční prvek,
Předpoklady: konstrukce je idealizována jako soustava bodů a tuhých těles (v prostoru) nebo bodů a tuhých desek (v rovině) konstrukce je v rovnováze
 nebo bodů a tuhých desek (v rovině) konstrukce je v rovnováze") 4.5 eakce staticky určitých konstrukcí Úloha: posoudit statickou určitost / navrhnout podepření konstrukce jistit jakými silami jsou namáhanéčásti konstrukce, jakými silami působí konstrukce na áklady
4.5 eakce staticky určitých konstrukcí Úloha: posoudit statickou určitost / navrhnout podepření konstrukce jistit jakými silami jsou namáhanéčásti konstrukce, jakými silami působí konstrukce na áklady
Vnitřní síly v prutových konstrukcích
 Vnitřní síly v prutových konstrukcích Síla je vektorová fyikální veličina, která vyjadřuje míru působení těles nebo polí. Zavedení síly v klasické Newtonově mechanice (popis pohybu těles) dp dv F = = m
Vnitřní síly v prutových konstrukcích Síla je vektorová fyikální veličina, která vyjadřuje míru působení těles nebo polí. Zavedení síly v klasické Newtonově mechanice (popis pohybu těles) dp dv F = = m
6.3 Momenty setrvačnosti a deviační momenty rovinných obrazců. yda. 1) I y, I z > 0. 2) I y, I z závisí na vzdálenosti plochy od osy II I I I I
 I y, I z > 0. 2) I y, I z závisí na vzdálenosti plochy od osy II I I I I") 6.3 Moment setrvačnosti a deviační moment rovinných obraců Statické moment rovinného obrace -k ose xiální moment setrvačnosti rovinného obrace -k ose -k ose Pon.: 1), > 0 S d d d. S d -k ose [m 3 ] [m
6.3 Moment setrvačnosti a deviační moment rovinných obraců Statické moment rovinného obrace -k ose xiální moment setrvačnosti rovinného obrace -k ose -k ose Pon.: 1), > 0 S d d d. S d -k ose [m 3 ] [m
STAVEBNÍ STATIKA. Ing. Petr Konečný, Ph.D. LPH 407/3. tel
 STAVEBNÍ STATIKA Ing. Petr Konečný, Ph.D. LPH 47/3 tel. 59 732 1394 petr.konecny@vsb.c http://fast1.vsb.c/konecny roklad síly v rovině síla pod úhlem γ - (k ose ) až -18 až +18 x A γ P P P x γ + x P x
STAVEBNÍ STATIKA Ing. Petr Konečný, Ph.D. LPH 47/3 tel. 59 732 1394 petr.konecny@vsb.c http://fast1.vsb.c/konecny roklad síly v rovině síla pod úhlem γ - (k ose ) až -18 až +18 x A γ P P P x γ + x P x
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Vybrané kapitoly z matematiky
 Vybrané kapitoly z matematiky VŠB-TU Ostrava 2017-2018 Vybrané kapitoly z matematiky 2017-2018 1 / 19 Základní informace předmět: 714-0513, 5 kreditů přednáší: Radek Kučera kontakt: radek.kucera@vsb.cz,
Vybrané kapitoly z matematiky VŠB-TU Ostrava 2017-2018 Vybrané kapitoly z matematiky 2017-2018 1 / 19 Základní informace předmět: 714-0513, 5 kreditů přednáší: Radek Kučera kontakt: radek.kucera@vsb.cz,
Statika 1. Úvod & Soustavy sil. Miroslav Vokáč 22. února ČVUT v Praze, Fakulta architektury. Statika 1. M. Vokáč.
 1. přednáška Úvod & Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 22. února 2016 Konzultační hodiny Ing. Miroslav Vokáč, Ph.D. Kloknerův ústav, ČVUT v Praze Šolínova 7 166 08
1. přednáška Úvod & Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 22. února 2016 Konzultační hodiny Ing. Miroslav Vokáč, Ph.D. Kloknerův ústav, ČVUT v Praze Šolínova 7 166 08
Souřadnicové výpočty I.
 Geodézie přednáška 7 Souřadnicové výpočt I. Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 Výpočet směrníku a délk stran v základním i podrobném bodovém poli
Geodézie přednáška 7 Souřadnicové výpočt I. Ústav geoinformačních technologií Lesnická a dřevařská fakulta ugt.mendelu.cz tel.: 545134015 Výpočet směrníku a délk stran v základním i podrobném bodovém poli
2.13 Rovinný obloukový nosník zatížený v rovině = staticky určitě podepřený rovinný obloukový prut
 .13 Rovinný obloukový nosník atížený v rovině = staticky určitě podepřený rovinný obloukový prut (střednice-rovinná křivka, atížení v rovině střednice) Geometrie obloukového prutu Poloha průřeu: s x =
.13 Rovinný obloukový nosník atížený v rovině = staticky určitě podepřený rovinný obloukový prut (střednice-rovinná křivka, atížení v rovině střednice) Geometrie obloukového prutu Poloha průřeu: s x =
Podmínky k získání zápočtu
 Podmínky k získání zápočtu 18 až 35 bodů 7 % aktivní účast, omluvená neúčast Odevzdání programů Testy: 8 nepovinných testů (-2 body nebo -3 body) 3 povinné testy s ohodnocením 5 bodů (povoleny 2 opravné
Podmínky k získání zápočtu 18 až 35 bodů 7 % aktivní účast, omluvená neúčast Odevzdání programů Testy: 8 nepovinných testů (-2 body nebo -3 body) 3 povinné testy s ohodnocením 5 bodů (povoleny 2 opravné
Rovnice přímky. s = AB = B A. X A = t s tj. X = A + t s, kde t R. t je parametr. x = a 1 + ts 1 y = a 2 + ts 2 z = a 3 + ts 3. t R
 Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
2. ANALYTICKÁ GEOMETRIE V PROSTORU Vektory Úlohy k samostatnému řešení... 21
 2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
Rovinná napjatost a Mohrova kružnice
 Rovinná napjatost a ohrova kružnice Dvojosý stav napjatosti - ukák anačení orientace napětí v rovině x Na obr. vlevo dole jsou vnačen složk napětí. Kladná orientace napětí x a je v případě, že vektor směřují
Rovinná napjatost a ohrova kružnice Dvojosý stav napjatosti - ukák anačení orientace napětí v rovině x Na obr. vlevo dole jsou vnačen složk napětí. Kladná orientace napětí x a je v případě, že vektor směřují
2.5 Rovnováha rovinné soustavy sil
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.5 Rovnováha rovinné soustavy sil Rovnováha sil je stav, kdy na těleso působí více sil, ale jejich výslednice
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Fyzika I mechanika. Rozdělení fyziky podle jednotlivých oborů, tj. podle jevů, které zkoumá:
 Fika I mechanika Úvod Základní fikální pojm Fika (fsis je řeck příroda) bla původně vědou o přírodě, ted souhrnem všech přírodních věd, které se s postupem dějin osamostatnil. Fika si však achovává ústřední
Fika I mechanika Úvod Základní fikální pojm Fika (fsis je řeck příroda) bla původně vědou o přírodě, ted souhrnem všech přírodních věd, které se s postupem dějin osamostatnil. Fika si však achovává ústřední
Analytická geometrie lineárních útvarů
 ) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
Vzorce počítačové grafiky
 Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
6. Vektorový počet Studijní text. 6. Vektorový počet
 6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
Normálová napětí v prutech namáhaných na ohyb
 Pružnost a plasticita, 2.ročník kombinovaného studia Normálová napětí v prutech namáhaných na ohb Základní vtah a předpoklad řešení Výpočet normálového napětí Dimenování nosníků namáhaných na ohb Složené
Pružnost a plasticita, 2.ročník kombinovaného studia Normálová napětí v prutech namáhaných na ohb Základní vtah a předpoklad řešení Výpočet normálového napětí Dimenování nosníků namáhaných na ohb Složené
Stavební mechanika 2 (K132SM02)
") Stavební mechanika 2 (K132SM02) Přednáší: doc. Ing. Matěj Lepš, Ph.D. Katedra mechaniky K132 místnost D2034 e-mail: matej.leps@fsv.cvut.cz konzultační hodiny budou upřesněny později https://mech.fsv.cvut.cz/student/
Stavební mechanika 2 (K132SM02) Přednáší: doc. Ing. Matěj Lepš, Ph.D. Katedra mechaniky K132 místnost D2034 e-mail: matej.leps@fsv.cvut.cz konzultační hodiny budou upřesněny později https://mech.fsv.cvut.cz/student/
Kapitola 2. o a paprsek sil lze ztotožnit s osou x (obr.2.1). sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.
. sil a velikost rovnou algebraickému součtu sil podle vztahu R = F i, (2.") Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Kapitola 2 Přímková a rovinná soustava sil 2.1 Přímková soustava sil Soustava sil ležící ve společném paprsku se nazývá přímková soustava sil [2]. Působiště všech sil m i lze posunout do společného bodu
Betonové konstrukce (S) Přednáška 3
 Přednáška 3") Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
Betonové konstrukce (S) Přednáška 3 Obsah Účinky předpětí na betonové prvky a konstrukce Silové působení kabelu na beton Ekvivalentní zatížení Staticky neurčité účinky předpětí Konkordantní kabel, Lineární
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
Nelineární analýza materiálů a konstrukcí (V-132YNAK)
") Nelineární analýa materiálů a konstrukcí (V-132YNAK) Volitelný předmět 1+1, Vučuje: prof. Ing. Petr Kabele, Ph.D. místnost B328, tel: 4485, e-mail: petr.kabele@fsv.cvut.c Návanost na předmět Přetváření
Nelineární analýa materiálů a konstrukcí (V-132YNAK) Volitelný předmět 1+1, Vučuje: prof. Ing. Petr Kabele, Ph.D. místnost B328, tel: 4485, e-mail: petr.kabele@fsv.cvut.c Návanost na předmět Přetváření
Z hlediska pružnosti a pevnosti si lze stav napjatosti
 S T R O J N IC K Á P Ř ÍR U Č K A část 7, díl 4, kapitola 1, str. 1 7/4.1 T Y P Y N A P J A T O S T I A T R A N S F O R M A C E N A P J A T O S T I Pojmem napjatost roumíme stav určitého bodu tělesa, který
S T R O J N IC K Á P Ř ÍR U Č K A část 7, díl 4, kapitola 1, str. 1 7/4.1 T Y P Y N A P J A T O S T I A T R A N S F O R M A C E N A P J A T O S T I Pojmem napjatost roumíme stav určitého bodu tělesa, který
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony
 Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Připravil: Roman Pavlačka, Markéta Sekaninová Dynamika, Newtonovy zákony OPVK CZ.1.07/2.2.00/28.0220, "Inovace studijních programů zahradnických oborů s důrazem na jazykové a odborné dovednosti a konkurenceschopnost
Hledané složky vektoru tvoří odvěsny pravoúhlého trojúhelníku:
 7 Vektor III Předpoklad: 006 Pedagogická ponámka: Příklad, 4, 5 je možné vnechat, důležité je, ab alespoň 5 minut blo na příklad 7 Pedagogická ponámka: Úvodní příklad vužívám k prokoušení látk minulé hodin
7 Vektor III Předpoklad: 006 Pedagogická ponámka: Příklad, 4, 5 je možné vnechat, důležité je, ab alespoň 5 minut blo na příklad 7 Pedagogická ponámka: Úvodní příklad vužívám k prokoušení látk minulé hodin
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil
 Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Okruhy problémů k teoretické části zkoušky Téma 1: Základní pojmy Stavební statiky a soustavy sil Souřadný systém, v rovině i prostoru Síla bodová: vektorová veličina (kluzný, vázaný vektor - využití),
Mechanika tuhého tělesa
 Mechanika tuhého tělesa Tuhé těleso je ideální těleso, jehož tvar ani objem se působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky Pohyby tuhého tělesa Posuvný
Mechanika tuhého tělesa Tuhé těleso je ideální těleso, jehož tvar ani objem se působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky Pohyby tuhého tělesa Posuvný
ÚSTAV MECHANIKY A MATERIÁLŮ FD ČVUT. DOC. ING. MICHAL MICKA, CSc. PŘEDNÁŠKA 4
 ÚVOD DO TEORIE MATEMATICKÉ PRUŽNOSTI ZÁKLADNÍ PŘEDPOKLADY A POJMY. Látka, která vtváří příslušné těleso je dokonale lineárně pružné, mei napětím a přetvořením je lineární ávislost.. Látka hmotného tělesa
ÚVOD DO TEORIE MATEMATICKÉ PRUŽNOSTI ZÁKLADNÍ PŘEDPOKLADY A POJMY. Látka, která vtváří příslušné těleso je dokonale lineárně pružné, mei napětím a přetvořením je lineární ávislost.. Látka hmotného tělesa
FYZIKA I. Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Rovnoměrný, rovnoměrně zrychlený a nerovnoměrně zrychlený rotační pohyb Prof. RNDr. Vilém Mádr, CSc. Prof. Ing. Libor Hlaváč, Ph.D.
Pružnost a pevnost I
 Stránka 1 teoretické otázk 2007 Ing. Tomáš PROFANT, Ph.D. verze 1.1 OBSAH: 1. Tenzor napětí 2. Věta o sdruženosti smkových napětí 3. Saint Venantův princip 4. Tenzor deformace (přetvoření) 5. Geometrická
Stránka 1 teoretické otázk 2007 Ing. Tomáš PROFANT, Ph.D. verze 1.1 OBSAH: 1. Tenzor napětí 2. Věta o sdruženosti smkových napětí 3. Saint Venantův princip 4. Tenzor deformace (přetvoření) 5. Geometrická
Matematika I 12a Euklidovská geometrie
 Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Matematika I 12a Euklidovská geometrie Jan Slovák Masarykova univerzita Fakulta informatiky 3. 12. 2012 Obsah přednášky 1 Euklidovské prostory 2 Odchylky podprostorů 3 Standardní úlohy 4 Objemy Plán přednášky
Vektory II. Předpoklady: Umíme už vektory sčítat, teď zkusíme opačnou operací rozklad vektoru na složky.
 5 Vektor II Předpoklad: 4 Umíme už vektor sčítat, teď zkusíme opačnou operací rozklad vektoru na složk Př : Na obrázku je nakreslena síla Nakresli do obrázku síl a tak, ab platilo = + Kolik má úloha řešení?
5 Vektor II Předpoklad: 4 Umíme už vektor sčítat, teď zkusíme opačnou operací rozklad vektoru na složk Př : Na obrázku je nakreslena síla Nakresli do obrázku síl a tak, ab platilo = + Kolik má úloha řešení?
Souřadnicové výpočty. Geodézie Přednáška
 Souřadnicové výpočt Geodézie Přednáška Souřadnicové výpočt strana 2 Souřadnicové výpočt (souřadnicová geometrie) vchází z analtické geometrie zkoumá geometrické tvar pomocí algebraických a analtických
Souřadnicové výpočt Geodézie Přednáška Souřadnicové výpočt strana 2 Souřadnicové výpočt (souřadnicová geometrie) vchází z analtické geometrie zkoumá geometrické tvar pomocí algebraických a analtických
Analytická geometrie ( lekce)
") Analytická geometrie (5. - 6. lekce) Sylva Potůčková, Dana Stesková, Lubomír Sedláček Gymnázium a Jazyková škola s právem státní jazykové zkoušky Zlín Zlín, 20. června 2011 Vektory Vektorový součin Vektorový
Analytická geometrie (5. - 6. lekce) Sylva Potůčková, Dana Stesková, Lubomír Sedláček Gymnázium a Jazyková škola s právem státní jazykové zkoušky Zlín Zlín, 20. června 2011 Vektory Vektorový součin Vektorový
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
11. VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ
 11. VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ Dovednosti: 1. Chápat pojmy orientovaná úsečka a vektor a geometrický význam součtu, rozdílu a reálného násobku orientovaných úseček a vektorů..
11. VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ Dovednosti: 1. Chápat pojmy orientovaná úsečka a vektor a geometrický význam součtu, rozdílu a reálného násobku orientovaných úseček a vektorů..
Průmyslová střední škola Letohrad. Ing. Soňa Chládková. Sbírka příkladů. ze stavební mechaniky
 Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Průmyslová střední škola Letohrad Ing. Soňa Chládková Sbírka příkladů ze stavební mechaniky 2014 Tento projekt je realizovaný v rámci OP VK a je financovaný ze Strukturálních fondů EU (ESF) a ze státního
Úvod do soustav sil. 1. Axiom o rovnováze sil F 1 F 2. tuhém tělese na stejném paprsku jsou v rovnováze. Axiomy statiky. Statika 1. M. Vokáč.
 1. cvičení Svazek sil & tlak Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 14. února 2018 do soustav sil Síla je vektor y tuhé těleso F & tlak působiště paprsek [0,0] α A[x A,y
1. cvičení Svazek sil & tlak Miroslav Vokáč miroslav.vokac@cvut.cz ČVUT v Praze, Fakulta architektury 14. února 2018 do soustav sil Síla je vektor y tuhé těleso F & tlak působiště paprsek [0,0] α A[x A,y
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
Petr Kabele
 4. Statika tuhých objektů 4.1 Idealizovaný model konstrukce předpoklad: konstrukci (jako celek nebo jejíčásti) idealizujme jako body, tuhá tělesa nebo tuhé desky (viz 1. a 2. přednáška) foto:godden Structural
4. Statika tuhých objektů 4.1 Idealizovaný model konstrukce předpoklad: konstrukci (jako celek nebo jejíčásti) idealizujme jako body, tuhá tělesa nebo tuhé desky (viz 1. a 2. přednáška) foto:godden Structural
T leso. T leso. nap ě tí na prostorovém elementu normálové - působí kolmo k ploše smykové - působí v ploše
 Prostorový model ákladní veli č in a vtah nejlépe odrážejí skte č nost obtížn ě ř ešitelný sstém rovnic obtížn ě jší interpretace výsledků ákladní vtah posktjí rámec pro odvoení D a 2D modelů D a 2D model
Prostorový model ákladní veli č in a vtah nejlépe odrážejí skte č nost obtížn ě ř ešitelný sstém rovnic obtížn ě jší interpretace výsledků ákladní vtah posktjí rámec pro odvoení D a 2D modelů D a 2D model
Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa
 Mechanika tuhého tělesa Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa Mechanika tuhého tělesa těleso nebudeme nahrazovat
Mechanika tuhého tělesa Pohyby tuhého tělesa Moment síly vzhledem k ose otáčení Skládání a rozkládání sil Dvojice sil, Těžiště, Rovnovážné polohy tělesa Mechanika tuhého tělesa těleso nebudeme nahrazovat
Stavební mechanika 1 - K132SM1 Structural mechanics
 Stavební mechanika 1 - K132SM1 Structural mechanics Přednášející Vít Šmilauer, Ing., Ph.D. katedra Mechaniky vit.smilauer@fsv.cvut.cz místnost D2034, konzultační hodiny Út 10:00 11:30 Literatura Kufner,
Stavební mechanika 1 - K132SM1 Structural mechanics Přednášející Vít Šmilauer, Ing., Ph.D. katedra Mechaniky vit.smilauer@fsv.cvut.cz místnost D2034, konzultační hodiny Út 10:00 11:30 Literatura Kufner,
Operace s maticemi. 19. února 2018
 Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
F n = F 1 n 1 + F 2 n 2 + F 3 n 3.
 Plošný integrál Několik pojmů Při našich úvahách budeme často vužívat skalární součin dvou vektorů. Platí F n F n cos α, kde α je úhel, který svírají vektor F a n. Vidíme, že pokud je tento úhel ostrý,
Plošný integrál Několik pojmů Při našich úvahách budeme často vužívat skalární součin dvou vektorů. Platí F n F n cos α, kde α je úhel, který svírají vektor F a n. Vidíme, že pokud je tento úhel ostrý,
Pružnost a pevnost. 2. přednáška, 10. října 2016
 Pružnost a pevnost 2. přednáška, 10. října 2016 Prut namáhaný jednoduchým ohybem: rovnoměrně ohýbaný prut nerovnoměrně ohýbaný prut příklad výpočet napětí a ohybu vliv teplotních měn příklad nerovnoměrné
Pružnost a pevnost 2. přednáška, 10. října 2016 Prut namáhaný jednoduchým ohybem: rovnoměrně ohýbaný prut nerovnoměrně ohýbaný prut příklad výpočet napětí a ohybu vliv teplotních měn příklad nerovnoměrné
Pružnoplastická analýza
 Pružnost a pevnost 132PRPE Přednášk Pružnoplastická analýa Nepružné cování materiálů. Pružnoplastický a plastický stav průřeu oýbanýc prutů. Mení plastická analýa nosníku. Petr Kabele České vsoké učení
Pružnost a pevnost 132PRPE Přednášk Pružnoplastická analýa Nepružné cování materiálů. Pružnoplastický a plastický stav průřeu oýbanýc prutů. Mení plastická analýa nosníku. Petr Kabele České vsoké učení
F - Mechanika tuhého tělesa
 F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
F - Mechanika tuhého tělesa Učební text pro studenty dálkového studia a shrnující text pro studenty denního studia. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven a vytištěn v programu dosystem
Konstrukci (jejíčásti) budeme idealizovat jako tuhá (nedeformovatelná) tělesa (v prostoru) nebo desky (v rovině).
 budeme idealizovat jako tuhá (nedeformovatelná) tělesa (v prostoru) nebo desky (v rovině).") . íl působící na tělso/dsku.. Zadání úloh, přdpoklad Úloha: obcněji matmatick popsat mchanické účink atížní na konstukci a účink částí konstukc navájm. Konstukci (jjíčásti) budm idaliovat jako tuhá (ndfomovatlná)
. íl působící na tělso/dsku.. Zadání úloh, přdpoklad Úloha: obcněji matmatick popsat mchanické účink atížní na konstukci a účink částí konstukc navájm. Konstukci (jjíčásti) budm idaliovat jako tuhá (ndfomovatlná)
3) Vypočtěte souřadnice průsečíku dané přímky p : x = t, y = 9 + 3t, z = 1 + t, t R s rovinou ρ : 3x + 5y z 2 = 0.
 Vypočtěte souřadnice průsečíku dané přímky p : x = t, y = 9 + 3t, z = 1 + t, t R s rovinou ρ : 3x + 5y z 2 = 0.") M1 Prog4 D1 1) Určete vektor c kolmý na vektory a = 2 i 3 j + k, b = i + 2 j 4 k. 2) Napište obecnou a parametrické rovnice roviny, která prochází bodem A[ 1; 1; 2] a je kolmá ke dvěma rovinám ρ : x 2y
M1 Prog4 D1 1) Určete vektor c kolmý na vektory a = 2 i 3 j + k, b = i + 2 j 4 k. 2) Napište obecnou a parametrické rovnice roviny, která prochází bodem A[ 1; 1; 2] a je kolmá ke dvěma rovinám ρ : x 2y
1.4. VEKTOROVÝ SOUČIN
 .4. VEKTOROVÝ SOUČIN V této kapitole se dozvíte: definici vektorového (také vnějšího) součinu, jeho vlastnosti a geometrický význam; co rozumíme pravotočivou ortonormální nebo ortogonální bází; definici
.4. VEKTOROVÝ SOUČIN V této kapitole se dozvíte: definici vektorového (také vnějšího) součinu, jeho vlastnosti a geometrický význam; co rozumíme pravotočivou ortonormální nebo ortogonální bází; definici
1. výpočet reakcí R x, R az a R bz - dle kapitoly 3, q = q cosα (5.1) kolmých (P ). iz = P iz sinα (5.2) iz = P iz cosα (5.3) ix = P ix cosα (5.
 kolmých (P ). iz = P iz sinα (5.2) iz = P iz cosα (5.3) ix = P ix cosα (5.") Kapitola 5 Vnitřní síly přímého šikmého nosníku Pojem šikmý nosník je používán dle publikace [1] pro nosník ležící v souřadnicové rovině xz, který je vůči vodorovné ose x pootočen o úhel α. Pro šikmou
Kapitola 5 Vnitřní síly přímého šikmého nosníku Pojem šikmý nosník je používán dle publikace [1] pro nosník ležící v souřadnicové rovině xz, který je vůči vodorovné ose x pootočen o úhel α. Pro šikmou
Integrální definice vnitřních sil na prutu
 Přednáška 04 Integrální definice vnitřních sil Ohb prutu v rovinách x, x Šikmý ohb Kombinace normálové síl s ohbem Poloha neutrální os Jádro průřeu Příklad Copright (c) 011 Vít Šmilauer Cech Technical
Přednáška 04 Integrální definice vnitřních sil Ohb prutu v rovinách x, x Šikmý ohb Kombinace normálové síl s ohbem Poloha neutrální os Jádro průřeu Příklad Copright (c) 011 Vít Šmilauer Cech Technical
Konstrukci (její části) budeme idealizovat jako tuhá (nedeformovatelná) tělesa (v prostoru) nebo desky (v rovině).
 budeme idealizovat jako tuhá (nedeformovatelná) tělesa (v prostoru) nebo desky (v rovině).") . íl působící na tělso/dsku.. Zadání úloh, přdpoklad Úloha této kapitol: obcněji matmatick popsat mchanické účink atížní na konstukci a účink částí konstukc navájm. Konstukci (jjí části) budm idaliovat
. íl působící na tělso/dsku.. Zadání úloh, přdpoklad Úloha této kapitol: obcněji matmatick popsat mchanické účink atížní na konstukci a účink částí konstukc navájm. Konstukci (jjí části) budm idaliovat
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
Stavební statika. Cvičení 1 Přímková a rovinná soustava sil. Goniometrické funkce. Přímková a rovinná soustava sil. 1) Souřadný systém
 Souřadný systém") Vysoká škola báňskb ská Technická univeita Ostava Stavební statika Cvičení 1 římková a ovinná soustava sil římková soustava sil ovinný svaek sil Statický moment síly k bodu a dvojice sil v ovině Obecná
Vysoká škola báňskb ská Technická univeita Ostava Stavební statika Cvičení 1 římková a ovinná soustava sil římková soustava sil ovinný svaek sil Statický moment síly k bodu a dvojice sil v ovině Obecná
Trojúhelníky. a jejich různé středy. Součet vnitřních úhlů trojúhelníku = 180 neboli π radiánů.
 Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Úvod V této knize předkládáme čtenáři základní matematické a fyzikální vzorce v přívětivé a snadno použitelné podobě. Využití čísel a symbolů k modelování, předpovídání a ovládání reality je mocnou zbraní
Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan Vyčichl, Ph.D.
 Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Statika (18SAT) letní semestr 2016/2017 přednášky: Ing. Daniel Kytýř, Ph.D. cvičení: Ing. Tomáš Doktor, Ing. Petr Koudelka, Ing. Nela Krčmářová, Ing. Jitka Řezníčková, CSc., Ing. Jan Šleichrt, Ing. Jan
Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím
 Stavební mechanika, 2.ročník bakalářského studia AST Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím Katedra stavební mechaniky Fakulta stavební, VŠB - Technická univerzita Ostrava Osnova přednášky
Stavební mechanika, 2.ročník bakalářského studia AST Téma 3 Úvod ke staticky neurčitým prutovým konstrukcím Katedra stavební mechaniky Fakulta stavební, VŠB - Technická univerzita Ostrava Osnova přednášky
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Analýza napjatosti PLASTICITA
 Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
Soustava hmotných bodů
 Soustava hmotných bodů Těleso soustava hmotných bodů Tuhé těleso - pevný předmět jehož rozměr se nemění každé těleso se skládá z mnoha částc síla působící na -tou částc výsledná síla působící na předmět
Soustava hmotných bodů Těleso soustava hmotných bodů Tuhé těleso - pevný předmět jehož rozměr se nemění každé těleso se skládá z mnoha částc síla působící na -tou částc výsledná síla působící na předmět
Gymnázium Jiřího Ortena, Kutná Hora
 Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
Předmět: Náplň: Cvičení z matematiky geometrie (CZMg) Systematizace a prohloubení učiva matematiky Planimetrie, Stereometrie, Analytická geometrie, Kombinatorika, Pravděpodobnost a statistika Třída: 4.
1 Tuhé těleso a jeho pohyb
 1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
1 Tuhé těleso a jeho pohyb Tuhé těleso (TT) působením vnějších sil se nemění jeho tvar ani objem nedochází k jeho deformaci neuvažuje se jeho částicová struktura, těleso považujeme za tzv. kontinuum spojité
3.2. ANALYTICKÁ GEOMETRIE ROVINY
 3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
3.2. ANALYTICKÁ GEOMETRIE ROVINY V této kapitole se dozvíte: jak popsat rovinu v třídimenzionálním prostoru; jak analyzovat vzájemnou polohu bodu a roviny včetně jejich vzdálenosti; jak analyzovat vzájemnou
Zjednodušená deformační metoda (2):
:") Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
Stavební mechanika 1SM Přednášky Zjednodušená deformační metoda () Prut s kloubově připojeným koncem (statická kondenzace). Řešení rovinných rámů s posuvnými patry/sloupy. Prut s kloubově připojeným koncem
Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti.
 U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
Přednáška 08. Obecná trojosá napjatost. Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův zákon Příklad zemní tlak v klidu
 Přednáška 08 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův ákon Příklad emní tlak v klidu Copyright (c) 2011 Vít Šmilauer Cech Technical University in
Přednáška 08 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův ákon Příklad emní tlak v klidu Copyright (c) 2011 Vít Šmilauer Cech Technical University in
Ohyb nastává, jestliže v řezu jakožto vnitřní účinek působí ohybový moment, tj. dvojice sil ležící v rovině kolmé k rovině řezu.
 Ohyb přímých prutů nosníků Ohyb nastává, jestliže v řeu jakožto vnitřní účinek působí ohybový moment, tj dvojice sil ležící v rovině kolmé k rovině řeu Ohybový moment určíme jako součet momentů od všech
Ohyb přímých prutů nosníků Ohyb nastává, jestliže v řeu jakožto vnitřní účinek působí ohybový moment, tj dvojice sil ležící v rovině kolmé k rovině řeu Ohybový moment určíme jako součet momentů od všech
11. VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ. u. v = u v + u v. Umět ho aplikovat při
 . VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ Dovednosti:. Chápat pojmy orientovaná úsečka a vektor a geometrický význam součtu, rozdílu a reálného násobku orientovaných úseček a vektorů..
. VEKTOROVÁ ALGEBRA A ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ Dovednosti:. Chápat pojmy orientovaná úsečka a vektor a geometrický význam součtu, rozdílu a reálného násobku orientovaných úseček a vektorů..
Systém vztahů obecné pružnosti Zobecněný Hookeův zákon
 Stém vtahů obecné pružnoti Zobecněný Hookeův ákon V PPI e řešil úloh pružnoti u prutů. Pro řešení pouvů napětí a přetvoření obecného 3D těleo je třeba etavit a řešit tém vtahů obecné pružnoti. Jeho řešení
Stém vtahů obecné pružnoti Zobecněný Hookeův ákon V PPI e řešil úloh pružnoti u prutů. Pro řešení pouvů napětí a přetvoření obecného 3D těleo je třeba etavit a řešit tém vtahů obecné pružnoti. Jeho řešení
Přijímací zkouška na MFF UK v Praze
 Přijímací kouška na MFF UK v Prae Studijní program Matematika, bakalářské studium Studijní program Informatika, bakalářské studium 2013, varianta A U každé deseti úloh je nabíeno pět odpovědí: a, b, c,
Přijímací kouška na MFF UK v Prae Studijní program Matematika, bakalářské studium Studijní program Informatika, bakalářské studium 2013, varianta A U každé deseti úloh je nabíeno pět odpovědí: a, b, c,
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
Moment síly výpočet
 Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
Projekt: Inovace oboru Mechatronik pro Zlínský kraj Registrační číslo: CZ.1.07/1.1.08/03.0009 2.2.3.2 Moment síly výpočet Moment síly je definován jako součin síly a kolmé vzdálenosti osy síly od daného
( ) ( ) ( ) ( ) Skalární součin II. Předpoklady: 7207
 ( ) ( ) ( ) Skalární součin II. Předpoklady: 7207") 78 Skalární součin II Předpoklady: 707 Pedagogická poznámka: Hodina má tři části, považuji tu prostřední za nejméně důležitou a proto v případě potřeby omezuji hlavně ji Na začátku hodiny je důležité nechat
78 Skalární součin II Předpoklady: 707 Pedagogická poznámka: Hodina má tři části, považuji tu prostřední za nejméně důležitou a proto v případě potřeby omezuji hlavně ji Na začátku hodiny je důležité nechat
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Téma 7 Smyková napětí v ohýbaných nosnících
 Pružnost a plasticita,.ročník bakalářského studia Téma 7 Smková napětí v ohýbaných nosnících Základní vtah a předpoklad řešení Výpočet smkového napětí vbraných průřeů Dimenování nosníků namáhaných na smk
Pružnost a plasticita,.ročník bakalářského studia Téma 7 Smková napětí v ohýbaných nosnících Základní vtah a předpoklad řešení Výpočet smkového napětí vbraných průřeů Dimenování nosníků namáhaných na smk
Fotbalový míč má tvar mnohostěnu složeného z pravidelných pětiúhelníků a z pravidelných šestiúhelníků.
 FOTLOÝ MÍČ Popis aktivit ýpočt odchlek přímek a rovin v tělese, resp. velikostí úhlů, které svírají stěn a hran v mnohostěnu. Předpokládané znalosti Odchlka rovin a přímk, odchlka dvou rovin. Definice
FOTLOÝ MÍČ Popis aktivit ýpočt odchlek přímek a rovin v tělese, resp. velikostí úhlů, které svírají stěn a hran v mnohostěnu. Předpokládané znalosti Odchlka rovin a přímk, odchlka dvou rovin. Definice
Tutoriál programu ADINA
 Nelineární analýza materiálů a konstrukcí (V-132YNAK) Tutoriál programu ADINA Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2010 1 Výstupy programu ADINA: Preprocesor
Nelineární analýza materiálů a konstrukcí (V-132YNAK) Tutoriál programu ADINA Petr Kabele petr.kabele@fsv.cvut.cz people.fsv.cvut.cz/~pkabele Petr Kabele, 2007-2010 1 Výstupy programu ADINA: Preprocesor
Mechanika zemin a zakládání staveb, 2 ročník bakalářského studia. Zemní tlaky
 Mechanika zemin a zakládání staveb, 2 ročník bakalářského studia Zemní tlaky Rozdělení, aktivizace Výpočet pro soudržné i nesoudržné zeminy Tlaky zemin a vody na pažení Katedra geotechniky a podzemního
Mechanika zemin a zakládání staveb, 2 ročník bakalářského studia Zemní tlaky Rozdělení, aktivizace Výpočet pro soudržné i nesoudržné zeminy Tlaky zemin a vody na pažení Katedra geotechniky a podzemního
Dá se ukázat, že vzdálenost dvou bodů má tyto vlastnosti: 2.2 Vektor, souřadnice vektoru a algebraické operace s vektory
 Vektorový počet.1 Eklidovský prostor E 3 Eklidovský prostor E 3 je prostor spořádaných trojic (tj. bodů), v němž je definována vzdálenost dvo jeho bodů A, B (značíme ji AB ). Vzdálenost bodů A = [a 1,
Vektorový počet.1 Eklidovský prostor E 3 Eklidovský prostor E 3 je prostor spořádaných trojic (tj. bodů), v němž je definována vzdálenost dvo jeho bodů A, B (značíme ji AB ). Vzdálenost bodů A = [a 1,
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
FYZIKA I. Složené pohyby (vrh šikmý)
") VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Složené pohb (vrh šikmý) Prof. RNDr. Vilém Mádr, CSc. Prof. In. Libor Hlaváč, Ph.D. Doc. In. Irena Hlaváčová, Ph.D. Mr. Art. Damar
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ FYZIKA I Složené pohb (vrh šikmý) Prof. RNDr. Vilém Mádr, CSc. Prof. In. Libor Hlaváč, Ph.D. Doc. In. Irena Hlaváčová, Ph.D. Mr. Art. Damar
6 Skalární součin. u v = (u 1 v 1 ) 2 +(u 2 v 2 ) 2 +(u 3 v 3 ) 2
 2 +(u 2 v 2 ) 2 +(u 3 v 3 ) 2") 6 Skalární součin Skalární součin 1 je operace, která dvěma vektorům (je to tedy binární operace) přiřazuje skalár (v našem případě jde o reálné číslo, obecně se jedná o prvek nějakého tělesa T ). Dovoluje
6 Skalární součin Skalární součin 1 je operace, která dvěma vektorům (je to tedy binární operace) přiřazuje skalár (v našem případě jde o reálné číslo, obecně se jedná o prvek nějakého tělesa T ). Dovoluje
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vybrané metody řešení soustavy rovnic. Podmínky rovnováhy či ekvivalence vedou často na soustavu rovnic, např.
 : 4 2 R 1 1 R 2 0,8 R 3 : 8 0 R 1 1 R 2 0,8 R 3 : 2 1 R 1 2 R 2 0 R 3 [2 1 0,8 ] 0 1 0,8 1 2 0 A Vbrané metod řešení soustav rovnic Podmínk rovnováh či ekvivalence vedou často na soustavu rovnic, např.
: 4 2 R 1 1 R 2 0,8 R 3 : 8 0 R 1 1 R 2 0,8 R 3 : 2 1 R 1 2 R 2 0 R 3 [2 1 0,8 ] 0 1 0,8 1 2 0 A Vbrané metod řešení soustav rovnic Podmínk rovnováh či ekvivalence vedou často na soustavu rovnic, např.
B) výchovné a vzdělávací strategie jsou totožné se strategiemi vyučovacího předmětu Matematika.
 výchovné a vzdělávací strategie jsou totožné se strategiemi vyučovacího předmětu Matematika.") 4.8.3. Cvičení z matematiky Předmět Cvičení z matematiky je vyučován v sextě a v septimě jako volitelný předmět. Vzdělávací obsah vyučovacího předmětu Cvičení z matematiky vychází ze vzdělávací oblasti
4.8.3. Cvičení z matematiky Předmět Cvičení z matematiky je vyučován v sextě a v septimě jako volitelný předmět. Vzdělávací obsah vyučovacího předmětu Cvičení z matematiky vychází ze vzdělávací oblasti