SYNTÉZA FYZIKÁLNÍHO OPTIMÁLNÍHO SYSTÉMU
|
|
|
- Pavla Vaňková
- před 9 lety
- Počet zobrazení:
Transkript
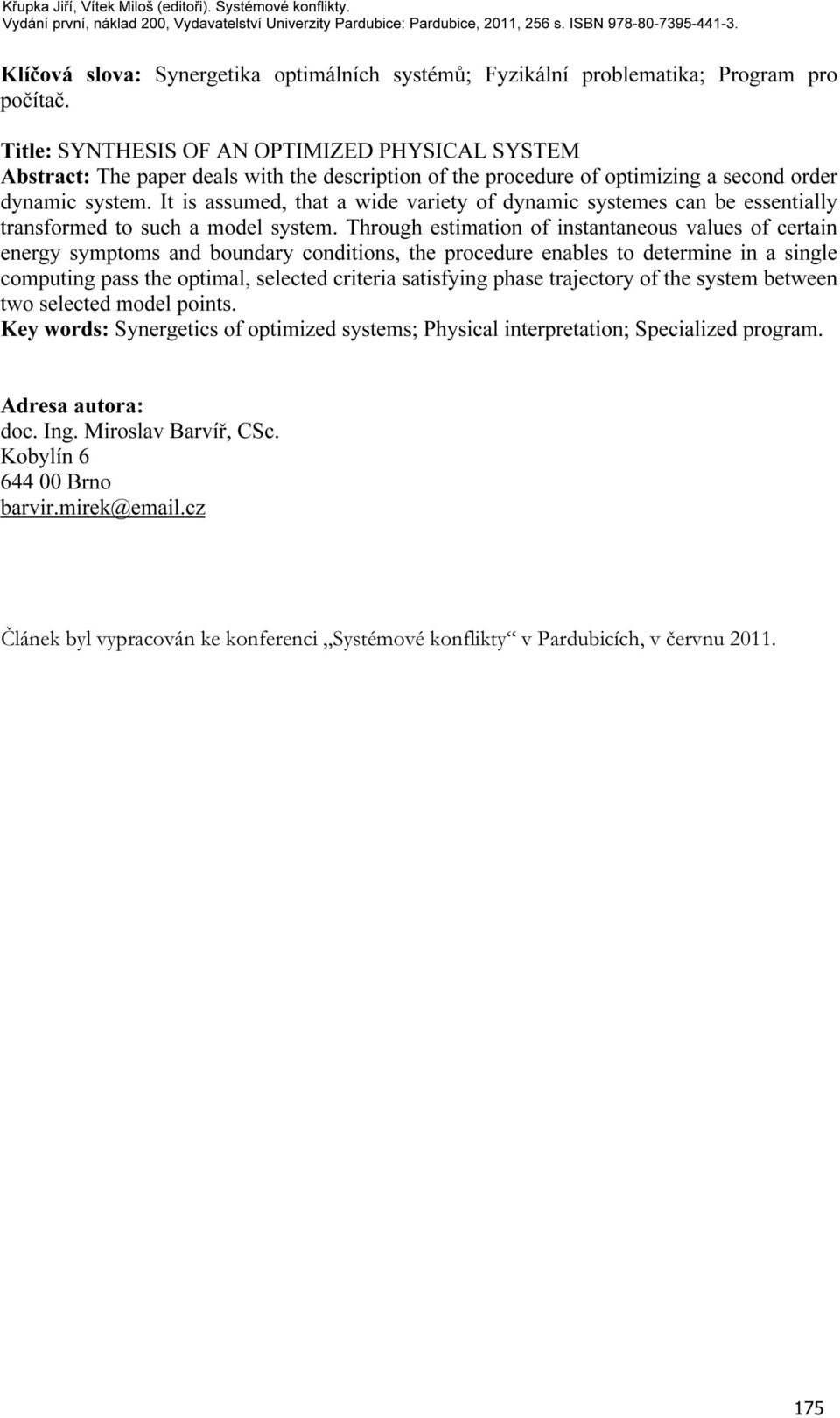
1 Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN SYNTÉZA FYZIKÁLNÍHO OPTIMÁLNÍHO SYSTÉMU Miroslav Barvíř Konec. a očáe. soleí znamená odsaný růni eleronicé výočení echniy do rozborů dynamicých rocesů. Byly o nejdříve analogové očíače, eré byly založeny na fyziální analogii. Později se rosadily číslicové očíače a sále výrazněji se rosazují i v současnosi. Je o ím, že dovolují využíva jednou již řiravené rogramy a že oračuje jejich neuvěřielná fyziální miniaurizace. Již v růběhu. soleí se výočy osunují směrem, aby výoče zajišťoval co nejrychlejší dosažení oimálních rajeorií dynamicých rocesů. Uázalo se, že vyhledávání exrémů je nová úloha, jejichž řešení si mnohdy vyžádá hodně času a úsilí. Dosi časo nás zajímají jen oimální řešení a aždé jiné je ro nás neřijaelné časovou zráou náročného vlasního výoču. Problémy zadání se řesouvají z oblasi čisě výočové do oblasi analyicého fyziálního oisu. Do zadávání úloh ro modelování vsuují analyici, schoní maemaicy osa řešenou roblemaiu a osléze uživaelé očíačů, eří mají oimálně rovés numericý výoče omocí očíače. Analyi by měl vědě ja má oimálním zůsobem osa sysém, aby výoče určoval modelovou rajeorii vzhledem e zvolenému riériu. Zvolíme rierium nejrašího času a uážeme, ja lze uo úlohu řeši. Deailně lze úlohu sledova v []. Zdá se, že aomizovaná (na jednolivé rvy rozdělená) říroda je ve svém rinciu oměrně jednoduchá a dynamia může bý osána souborem diferenciálních rovnic nejvýše druhého řádu. Ty složiější vzniají ombinací rovnic druhého řádu []. Sudujemeli aomizovanou čás řední čási vodní vlny, a můžeme ředvída její chování i bez znalosi dynamicých rovnic. Navíc víme, že na čele vlny není žádný očíač, erý by určoval směr jejího ou a ješě vyhledával oimální exremní rasu ohoo ohybu. Musíme řiusi, že důvodem ohybu v řírodě jsou jiné říznaové veličiny. Na yo veličiny narazil již v 8. soleí Joseh Louis Lagrange (73683). Pojmenoval je energiemi. Využil geniálních oznaů Isaaca Newona (64377). J. L. Lagrange se věnoval říznaovým vlasnosem rovnic I. Newona a racoval v období dy se zdalea lně nerozvinula eorie exremálních (oimálních) úloh. Uázal vša rovnocennos oisu, buď souřadnicemi ohybu nebo jejich říznaovými energiemi. Hledáme řešení úlohy, nám v odsaě generuje říčinnou zěnou vazbu omocí říznaových energeicých funcí ro oimální rajeorii. Srávný maemaicý určuje oamžié řízení jao oimální sojnici zadaných orajových bodů. Ideové schéma ro synézu oimálního řízení je uvedeno na obr. []. u() q (); q(); q (); q() Určení savových veličin I. Newon q () q() Určení říznaů energií J. L. Lagrange U r () Synéza oimálního řízení E (); E () Obr.. Ideové schéma ro synézu oimálního řízení Záladní y Newonovy rovnice řádu je ve varu: 7

2 Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN u r () = Q v () B Kq () D Kq(). () Záladní maemaicý ois synézy časově oimálního řízení je vořen rovnicemi () až (): Q () = u () u () D K q() B K q'(), de: () V r ur () je řízení určené synézou, u () je řízení ro onrolu saiy, q'( ) = K3 Qv ( ) d M je souřadnice zobecněné rychlosi, (3) q () = q'() d je souřadnice zobecněné výchyly, (4) E () { } = D q() je složa oenciální energie, (5) E () { } = M q'() je složa ineicé energie, (6) E () = E () sign q () je odchylová oenciální energie, (7) s E () = E () sign q'( ) je odchylová ineicá energie, (8) s E () = E() E() je celová energie, (9) E () = E () E () je celová odchylová energie, () s s s E () = E() E () je souče roínaných energií. () r s Na N() lze ozorova výon na S4, E( ) lze ozorova ráci na I4, H( ) lze ozorova hybnos na I6, dyž laí: N () = Q() q'( ), v E () = Nd (), H () = Q() d a () IF = Er () oom Ur () =,4nebo Er () < oom Ur () =. (3) v Rovnice () (4) oisují dle Newona ohybové rajeorie sysému. Rovnice (5) a (6) určují oenciální a ineicou energii omocí slože Lagrangeovy funce. Auor článu Barvíř M. (99) zavádí do sudia synézy ladnou a záornou odchylovou složu ěcho funcí od oncového bodu rovnicemi (7) a (8). Proínání oamžiých energií v rovnici () a určuje řeínací oamžiy mezi ladným a záorným řízením. To v říadě, zvolímeli ro řízení ouze dva maximálně říusné zobecněné signály různé olariy. Maemaicé (modelové) schéma ro číslicový očíač je uvedeno na obr.. Uážeme si nyní jednoduchý řílad časově oimální synézy. Volíme M = [g], D =MT, B = (oznáma: aramery jsou vyjádřeny v symbolech značení SI ř. MT = [gsec ]). Tao zvolené aramery vyvoří rajeorii z čásí ružnic navazujících v oimálních časech. K řízení oužijeme ladný signál u ()max=,4mlt a záorný u ()max= MLT. Řídi budeme jen v souřadnici q(). Ale můžeme řídi i v q (). Můžeme éž v růběhu řízení aramery růběžně měni ve veliosi i v čase. Rovnice () () nám dovoluje zaresli rogramové schéma synézy, viz obr.. 7
 E () = E () sign q () je odchylová oenciální energie, (7) s E () = E () sign q'( ) je odchylová ineicá energie, (8) s E () = E() E() je celová energie, (9) E () = E () E () je celová odchylová")
3 Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN E () IF S E() S S E S () E s () E S () S8 S9 E () E () S5 S6 D M sign q() ( ) ( ) I5 u () K K6 V r () S Q r () K3 M q () q () I I q() sign q () q() K B q () K D N()=výon E()=energie Klíč Ki = nebo, ro i=,,3,6 a. S7 K č T [H] I4 K č [J] I6 hybnos Obr.. Maemaicé (modelové) schéma ro číslicový očíač Obr. má ve své sruuře zaresleny oeficieny Ki (i = n), eré nám dovolují snadno měni sruuru vyšeřovaného sysému. Nař. K = zůsobí změnu ružnic v araboly, a. Schéma nám dovoluje omocí bloů sumáoru S7 a inegráoru I4 ozorova oamžié výony a energii v sysému. Sumační ro d je velmi ráý a je ovlivněn volbou numericé meody. Lze onsaova, že očíáme vždy ro jeden sumační ro s linearizovaným dynamicým modelem. Poměrně snadno můžeme vyšeřova nelineární sysémy. Oamžié hodnoy růběhů v sysému zísáme v aždém sumačním rou nebo jejich libovolném násobu změnou časového měřía. Sysém je ředsaven bloy S, I, I a odovídajícími zěnými vazbami dle oužié sruury. Bloy S a S generují ožadované řízení odle zvoleného rieria. Zvolené orajové body v demonsračním říladě jsou q ()=,4 LT, q()=l a q (T)=q(T)=. Lze sledova časové oamžiy oimálního řízení ve fázové rovině (viz obr. 3), říadně uéž úlohu v závislosi na čase. Závěrem něoli oznáme: ro naznačenou synézu je nuno řisoui aomizací oisu složiých sysémů na soubor diferenciálních rovnic druhého řádu omocí zobecněných aramerů složié sysémy mohou mí vnořené odsysémy éž druhého řádu ro analýzu je nuné roninou do fyziální odsay roblemaiy 73
![ro i=,,3,6 a. S7 K č T [H] I4 K č [J] I6 hybnos Obr.. Maemaicé (modelové) schéma ro číslicový očíač Obr.](/docs-images/53/10115224/images/page_3.jpg "má ve své sruuře zaresleny oeficieny Ki (i = n), eré nám dovolují snadno měni sruuru vyšeřovaného sysému. Nař. K = zůsobí změnu ružnic v araboly, a.")
4 Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN je žádoucí, aby ois aomizované sousavy druhého řádu byl naroso jasný aždému absolvenu záladního sudia všech odborných secializací včeně humaniních dosáhneme ím u všech absolvenů eonomicé gramonosi a jednonosi dynamicé erminologie usnadníme jejich vzájemnou omuniaci řes finanční sysémy, eré oíšeme v jiném řísěvu všechny vědní obory realizují ohyb v důsledu ransformace energie filozoficá odsaa všech oborů je jednoná svými zobecněnými aramery říznaem srovnávání sysémů je vyonaná ráce Joulem, erý je jednoduše řevodielný na finanční jednou v dané loaliě je nuné se zamysle nad rozříšěnosí a secializací vědních oborů řišla doba ro snadné očíačové vyšeřování sysémů a jejich oimální řízení q Fázová rovina U max D q()=l q ()=,4 LT U max D,4 q(t)= q (T)= q Obr. 3. Zobrazení fázové roviny Lieraura [] PONTRJAGIN L.S., BOLTJANSKIJ V.G., GAMKRELIDZE P. V., MIŠČENKO E. F.: Maemaičesja eoria oimalnych rocesov. Mosva: GIFML, 96. [] BARVÍŘ M. Modelování a idenifiace. VUT Brno, 99. [3] Absra: V řísěvu se oisuje zůsob synézy oimální rajeorie dynamicého sysému druhého řádu. V ředládané ráci uazujeme, ja je možno využí říznaových inegrálních funcí ineicé a oenciální oamžié energie výoču oimální rajeorie omocí očíače. 74

5
1.5.4 Kinetická energie
 .5.4 Kineicá energie Předolady: 50 Energie je jeden z nejoužívanějších, ale aé nejhůře definovaelných ojmů ve sředošolsé fyzice. V běžném živoě: energie = něco, co ořebujeme vyonávání ráce. Vysyuje se
.5.4 Kineicá energie Předolady: 50 Energie je jeden z nejoužívanějších, ale aé nejhůře definovaelných ojmů ve sředošolsé fyzice. V běžném živoě: energie = něco, co ořebujeme vyonávání ráce. Vysyuje se
5 DISKRÉTNÍ ROZDĚLENÍ PRAVDĚPODOBNOSTI. Čas ke studiu kapitoly: 120 minut. Cíl: Po prostudování tohoto odstavce budete umět:
 5 DISKRÉTNÍ ROZDĚLENÍ RAVDĚODOBNOSTI Čas e sudiu aioly: 0 miu Cíl: o rosudováí ohoo odsavce budee umě: charaerizova hyergeomericé rozděleí charaerizova Beroulliho ousy a z ich odvozeé jedolivé yy disréích
5 DISKRÉTNÍ ROZDĚLENÍ RAVDĚODOBNOSTI Čas e sudiu aioly: 0 miu Cíl: o rosudováí ohoo odsavce budee umě: charaerizova hyergeomericé rozděleí charaerizova Beroulliho ousy a z ich odvozeé jedolivé yy disréích
LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická
 Sední rmslová škola elekroechnická a Všší odborná škola, Pardubice, Karla IV. 3 LABORATORNÍ CVIENÍ Sední rmslová škola elekroechnická Píjmení: Hladna íslo úloh: 2 Jméno: Jan Daum mení: 3. ÍJNA 2006 Školní
Sední rmslová škola elekroechnická a Všší odborná škola, Pardubice, Karla IV. 3 LABORATORNÍ CVIENÍ Sední rmslová škola elekroechnická Píjmení: Hladna íslo úloh: 2 Jméno: Jan Daum mení: 3. ÍJNA 2006 Školní
14. Soustava lineárních rovnic s parametrem
 @66 4. Sousava lineárních rovnic s aramerem Hned úvodem uozorňuji, že je velký rozdíl mezi sousavou rovnic řešenou aramerizováním, roože má nekonečně mnoho řešení zadaná sousava rovnic obsahuje jen číselné
@66 4. Sousava lineárních rovnic s aramerem Hned úvodem uozorňuji, že je velký rozdíl mezi sousavou rovnic řešenou aramerizováním, roože má nekonečně mnoho řešení zadaná sousava rovnic obsahuje jen číselné
1. Vysvětlete pojmy systém a orientované informační vazby (uveďte příklady a protipříklady). 2. Uveďte formy vnějšího a vnitřního popisu systémů.
. 2. Uveďte formy vnějšího a vnitřního popisu systémů.") Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
KEV/RT 2. přednáška. EK
 KEV/T. řednáša Marin Janda maa@ev.zcu.cz EK 05 377 63 4435 Oaování - lineární regulace P roorciální reguláor onsana malá odchyla malý výsu velé vhodné malé Záladní myšlena návrhu reguláoru chceme co nerychleší
KEV/T. řednáša Marin Janda maa@ev.zcu.cz EK 05 377 63 4435 Oaování - lineární regulace P roorciální reguláor onsana malá odchyla malý výsu velé vhodné malé Záladní myšlena návrhu reguláoru chceme co nerychleší
MIČKAL, Karel. Technická mechanika II: pro střední odborná učiliště. Vyd. 3., nezm. Praha: Informatorium, 1998c1990, 118 s. ISBN 80-860-7323-8.
 Idenifiáor maeriálu: ICT 1 9 Regisrační číslo rojeu Název rojeu Název říjemce odory název maeriálu (DUM) Anoace Auor Jazy Očeávaný výsu Klíčová slova Druh učebního maeriálu Druh ineraiviy Cílová suina
Idenifiáor maeriálu: ICT 1 9 Regisrační číslo rojeu Název rojeu Název říjemce odory název maeriálu (DUM) Anoace Auor Jazy Očeávaný výsu Klíčová slova Druh učebního maeriálu Druh ineraiviy Cílová suina
5. Využití elektroanalogie při analýze a modelování dynamických vlastností mechanických soustav
 5. Využií elekroanalogie při analýze a modelování dynamických vlasnosí mechanických sousav Analogie mezi mechanickými, elekrickými či hydraulickými sysémy je známá a lze ji účelně využíva při analýze dynamických
5. Využií elekroanalogie při analýze a modelování dynamických vlasnosí mechanických sousav Analogie mezi mechanickými, elekrickými či hydraulickými sysémy je známá a lze ji účelně využíva při analýze dynamických
Prezentace diplomové práce: CNC hydraulický ohraňovací lis Student: Školitel: Konzultant: Zadavatel: Klíčová slova: CNC hydraulic press brake Keyword:
 Horská 3, 8 00 Praha Prezenace dilomové ráce: CNC hydraulický ohraňovací lis Suden: Školiel: Konzulan: Zadavael: Klíčová slova: Anoace: Cíle ráce: CNC hydraulic ress brake Keyword: Annoaion: Targe of work:
Horská 3, 8 00 Praha Prezenace dilomové ráce: CNC hydraulický ohraňovací lis Suden: Školiel: Konzulan: Zadavael: Klíčová slova: Anoace: Cíle ráce: CNC hydraulic ress brake Keyword: Annoaion: Targe of work:
MATEMATIKA II V PŘÍKLADECH
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ MATEMATIKA II V PŘÍKLADECH CVIČENÍ Č. Ing. Pera Schreiberová, Ph.D. Osrava 0 Ing. Pera Schreiberová, Ph.D. Vysoká škola báňská Technická
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ MATEMATIKA II V PŘÍKLADECH CVIČENÍ Č. Ing. Pera Schreiberová, Ph.D. Osrava 0 Ing. Pera Schreiberová, Ph.D. Vysoká škola báňská Technická
1 - Úvod. Michael Šebek Automatické řízení
 1 - Úvod Michael Šebek Auomaické řízení 2018 9-6-18 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo) Sysém: určiá čás objeku, kerou se zabýváme, řídíme, Moor, sojka,
1 - Úvod Michael Šebek Auomaické řízení 2018 9-6-18 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo) Sysém: určiá čás objeku, kerou se zabýváme, řídíme, Moor, sojka,
Měřicí a řídicí technika magisterské studium FTOP - přednášky ZS 2009/10. měřicí člen. porovnávací. člen. REGULÁTOR ruční řízení
 Měřicí a řídicí echnia magisersé sudium FTOP - přednášy ZS 29/1 REGULACE regulované sousavy sandardní signály ační členy reguláory Bloové schéma regulačního obvodu z u regulovaná sousava y ační člen měřicí
Měřicí a řídicí echnia magisersé sudium FTOP - přednášy ZS 29/1 REGULACE regulované sousavy sandardní signály ační členy reguláory Bloové schéma regulačního obvodu z u regulovaná sousava y ační člen měřicí
CVIČENÍ Z ELEKTRONIKY
 Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
Matematika v automatizaci - pro řešení regulačních obvodů:
 . Komplexní čísla Inegrovaná sřední škola, Kumburská 846, Nová Paka Auomaizace maemaika v auomaizaci Maemaika v auomaizaci - pro řešení regulačních obvodů: Komplexní číslo je bod v rovině komplexních čísel.
. Komplexní čísla Inegrovaná sřední škola, Kumburská 846, Nová Paka Auomaizace maemaika v auomaizaci Maemaika v auomaizaci - pro řešení regulačních obvodů: Komplexní číslo je bod v rovině komplexních čísel.
Konstrukční úlohy metodická řada pro konstrukci trojúhelníku Irena Budínová Pedagogická fakulta MU
 Konstruční úlohy metodicá řada ro onstruci trojúhelníu Irena udínová Pedagogicá faulta MU irena.budinova@seznam.cz Konstruční úlohy tvoří jednu z důležitých součástí geometrie, neboť obsahují mnoho rozvíjejících
Konstruční úlohy metodicá řada ro onstruci trojúhelníu Irena udínová Pedagogicá faulta MU irena.budinova@seznam.cz Konstruční úlohy tvoří jednu z důležitých součástí geometrie, neboť obsahují mnoho rozvíjejících
I. Soustavy s jedním stupněm volnosti
 Jiří Máca - aedra mechaniy - B325 - el. 2 2435 45 maca@fsv.cvu.cz 1. Záladní úlohy dynamiy 2. Dynamicá zaížení 3. Pohybová rovnice 4. Volné nelumené miání 5. Vynucené nelumené miání 6. Přílady 7. Oáčivé
Jiří Máca - aedra mechaniy - B325 - el. 2 2435 45 maca@fsv.cvu.cz 1. Záladní úlohy dynamiy 2. Dynamicá zaížení 3. Pohybová rovnice 4. Volné nelumené miání 5. Vynucené nelumené miání 6. Přílady 7. Oáčivé
Stojina ohýbaného nosníku vyztužená příčnými výztuhami a jednou a podélnou výztuhou
 Pro. ng. Jose aháče DrS. Sojina ohýbaného nosníu vyzužená říčnými výzuhami a jednou a odélnou výzuhou Přílad Posuďe rosý nosní se sojinou vyzuženou říčnými i odélnými výzuhami. Rozěí nosníu L m zaížení
Pro. ng. Jose aháče DrS. Sojina ohýbaného nosníu vyzužená říčnými výzuhami a jednou a odélnou výzuhou Přílad Posuďe rosý nosní se sojinou vyzuženou říčnými i odélnými výzuhami. Rozěí nosníu L m zaížení
1.5.1 Mechanická práce I
 .5. Mechanická ráce I Předoklady: Práce je velmi vděčné éma k rozhovoru: někdo se nadře a ráce za ním není žádná, jiný se ani nezaoí a udělá oho sousu, a všichni se cíí nedocenění. Fyzika je řírodní věda
.5. Mechanická ráce I Předoklady: Práce je velmi vděčné éma k rozhovoru: někdo se nadře a ráce za ním není žádná, jiný se ani nezaoí a udělá oho sousu, a všichni se cíí nedocenění. Fyzika je řírodní věda
1 - Úvod. Michael Šebek Automatické řízení Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti
 1 - Úvod Michael Šebek Auomaické řízení 2016 Evroský sociální fond Praha & EU: Invesujeme do vaší budoucnosi 23-2-16 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo)
1 - Úvod Michael Šebek Auomaické řízení 2016 Evroský sociální fond Praha & EU: Invesujeme do vaší budoucnosi 23-2-16 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo)
2. Přídavky na obrábění
 2. Přídavy na obrábění Abyco oli z oloovaru vyrobi součás ředesanýc geoericýc varů a rozěrů, v ředesané výrobní oleranci a jaosi obrobené locy, usíe zvoli oloovar s dosaečnýi řídavy na obrábění. U oloovarů
2. Přídavy na obrábění Abyco oli z oloovaru vyrobi součás ředesanýc geoericýc varů a rozěrů, v ředesané výrobní oleranci a jaosi obrobené locy, usíe zvoli oloovar s dosaečnýi řídavy na obrábění. U oloovarů
Přibližná linearizace modelu kyvadla
 Přibližná linearizace model kyvadla 4..08 9:47 - verze 4.0 08 Obsah Oakování kalkl - Taylorův rozvoj fnkce... Nelineární savový model a jeho řibližná linearizace... 4 Nelineární model vs-výs a jeho řibližná
Přibližná linearizace model kyvadla 4..08 9:47 - verze 4.0 08 Obsah Oakování kalkl - Taylorův rozvoj fnkce... Nelineární savový model a jeho řibližná linearizace... 4 Nelineární model vs-výs a jeho řibližná
KIV/PD. Sdělovací prostředí
 KIV/PD Sdělovací prosředí Přenos da Marin Šime Orienační přehled obsahu předměu 2 principy přenosu da mezi 2 propojenými zařízeními předměem sudia je přímá cesa, ne omuniační síť ja se přenáší signály
KIV/PD Sdělovací prosředí Přenos da Marin Šime Orienační přehled obsahu předměu 2 principy přenosu da mezi 2 propojenými zařízeními předměem sudia je přímá cesa, ne omuniační síť ja se přenáší signály
IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA,
 IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA, STABILITA. Jednokový impuls (Diracův impuls, Diracova funkce, funkce dela) někdy éž disribuce dela z maemaického hlediska nejde o pravou funkci (přesný popis eorie
IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA, STABILITA. Jednokový impuls (Diracův impuls, Diracova funkce, funkce dela) někdy éž disribuce dela z maemaického hlediska nejde o pravou funkci (přesný popis eorie
Modelování a simulace regulátorů a čidel
 Modeloání a simulace regulátorů a čidel. Modeloání a simulace PI regulátoru Přenos PI regulátoru je yjádřen následujícím ztahem F( p) = ( + p ) p V Simulinu je tento blo obsažen nihoně prů. Bohužel použití
Modeloání a simulace regulátorů a čidel. Modeloání a simulace PI regulátoru Přenos PI regulátoru je yjádřen následujícím ztahem F( p) = ( + p ) p V Simulinu je tento blo obsažen nihoně prů. Bohužel použití
DRI. VARIZON Jednotka pro zaplavovací větrání s nastavitelným tvarem šíření
 VARIZON Jednoka ro zalavovací věrání s nasavielný vare šíření Sručná faka Nasavielný var šíření a ovlivněný rosor Vhodná ro všechny yy ísnosí Uožňuje čišění Míso ěření objeu vzduchu Veli jednoduše se insaluje
VARIZON Jednoka ro zalavovací věrání s nasavielný vare šíření Sručná faka Nasavielný var šíření a ovlivněný rosor Vhodná ro všechny yy ísnosí Uožňuje čišění Míso ěření objeu vzduchu Veli jednoduše se insaluje
ÚVOD DO DYNAMIKY HMOTNÉHO BODU
 ÚVOD DO DYNAMIKY HMOTNÉHO BODU Obsah Co je o dnamika? 1 Základní veličin dnamik 1 Hmonos 1 Hbnos 1 Síla Newonov pohbové zákon První Newonův zákon - zákon servačnosi Druhý Newonův zákon - zákon síl Třeí
ÚVOD DO DYNAMIKY HMOTNÉHO BODU Obsah Co je o dnamika? 1 Základní veličin dnamik 1 Hmonos 1 Hbnos 1 Síla Newonov pohbové zákon První Newonův zákon - zákon servačnosi Druhý Newonův zákon - zákon síl Třeí
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - TU Ostrava
 Kaedra obecné eleroechniy Faula eleroechniy a inforaiy, VŠB - U Osrava ELEKRIKÉ SROJE - rozdělení, druhy provedení, vlasnosi, dienzování. Rozdělení elericých srojů (přehled). Označování elericých srojů
Kaedra obecné eleroechniy Faula eleroechniy a inforaiy, VŠB - U Osrava ELEKRIKÉ SROJE - rozdělení, druhy provedení, vlasnosi, dienzování. Rozdělení elericých srojů (přehled). Označování elericých srojů
Maxwellovy a vlnová rovnice v obecném prostředí
 Maxwellovy a vlnová rovnie v obeném prosředí Ing. B. Mihal Malík, Ing. B. Jiří rimas TCHNICKÁ UNIVRZITA V LIBRCI Fakula meharoniky, informaiky a mezioborovýh sudií Teno maeriál vznikl v rámi proeku SF
Maxwellovy a vlnová rovnie v obeném prosředí Ing. B. Mihal Malík, Ing. B. Jiří rimas TCHNICKÁ UNIVRZITA V LIBRCI Fakula meharoniky, informaiky a mezioborovýh sudií Teno maeriál vznikl v rámi proeku SF
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNCKÁ UNVERZTA V LBERC Fakula mecharoniky, informaiky a mezioborových sudií Cvičení č3 k ředměu ELMO Přírava ke cvičení ng Jiří Primas, ng Michal Malík Liberec Maeriál vznikl v rámci rojeku ESF (CZ7//747)
TECHNCKÁ UNVERZTA V LBERC Fakula mecharoniky, informaiky a mezioborových sudií Cvičení č3 k ředměu ELMO Přírava ke cvičení ng Jiří Primas, ng Michal Malík Liberec Maeriál vznikl v rámci rojeku ESF (CZ7//747)
{ } Konstrukce trojúhelníků I. Předpoklady: 3404
 3.4.5 Konstrue trojúhelníů I Předolady: 3404 U onstručníh úloh rozeznáváme dva záladní tyy: olohové úlohy: jejih zadání většinou začíná slovy Je dána.. Tato věta znamená, že onstrui musíme začít rvem,
3.4.5 Konstrue trojúhelníů I Předolady: 3404 U onstručníh úloh rozeznáváme dva záladní tyy: olohové úlohy: jejih zadání většinou začíná slovy Je dána.. Tato věta znamená, že onstrui musíme začít rvem,
Závislost indexů C p,c pk na způsobu výpočtu směrodatné odchylky
 Závislost indexů C,C na zůsobu výočtu směrodatné odchyly Ing. Renata Przeczová atedra ontroly a řízení jaosti, VŠB-TU Ostrava, FMMI Podni, terý chce usět v dnešní onurenci, musí neustále reagovat na měnící
Závislost indexů C,C na zůsobu výočtu směrodatné odchyly Ing. Renata Przeczová atedra ontroly a řízení jaosti, VŠB-TU Ostrava, FMMI Podni, terý chce usět v dnešní onurenci, musí neustále reagovat na měnící
Konstrukce kružnic
 3.4.10 Konstruce ružnic Předolady: 3404 Př. 1: Jsou dány body K, L a M. Narýsuj všechny ružnice, teré rochází těmito třemi body. Kružnice - množina bodů, teré mají stejnou vzdálenost od středu ružnice
3.4.10 Konstruce ružnic Předolady: 3404 Př. 1: Jsou dány body K, L a M. Narýsuj všechny ružnice, teré rochází těmito třemi body. Kružnice - množina bodů, teré mají stejnou vzdálenost od středu ružnice
1 Gaussova kvadratura
 Cvičení - zadání a řešení úloh Zálady numericé matematiy - NMNM0 Verze z 7. prosince 08 Gaussova vadratura Fat, že pro něterá rovnoměrná rozložení uzlů dostáváme přesnost o stupeň vyšší napovídá, že pro
Cvičení - zadání a řešení úloh Zálady numericé matematiy - NMNM0 Verze z 7. prosince 08 Gaussova vadratura Fat, že pro něterá rovnoměrná rozložení uzlů dostáváme přesnost o stupeň vyšší napovídá, že pro
Otázky ke Státním závěrečným zkouškám
 Oázky ke Sáním závěrečným zkouškám jsou rozděleny do ří oblasí a sudenům bude oložena z každé oblasi vždy jedna oázka. Oblasi jsou rozděleny následovně :.Teorie řízení a umělá ineligence Sem aří okruhy
Oázky ke Sáním závěrečným zkouškám jsou rozděleny do ří oblasí a sudenům bude oložena z každé oblasi vždy jedna oázka. Oblasi jsou rozděleny následovně :.Teorie řízení a umělá ineligence Sem aří okruhy
Nakloněná rovina II
 3 Nakloněná rovina II Předoklady: Pedagogická oznáka: Obsah hodiny se za norálních okolnosí saozřejě nedá sihnou, záleží na Vás, co si vyberee Pedagogická oznáka: Na začáku hodiny zadá sudenů říklad Nečeká
3 Nakloněná rovina II Předoklady: Pedagogická oznáka: Obsah hodiny se za norálních okolnosí saozřejě nedá sihnou, záleží na Vás, co si vyberee Pedagogická oznáka: Na začáku hodiny zadá sudenů říklad Nečeká
ZPŮSOBY MODELOVÁNÍ ELASTOMEROVÝCH LOŽISEK
 ZPŮSOBY MODELOVÁNÍ ELASTOMEROVÝCH LOŽISEK Vzhledem ke skuečnosi, že způsob modelování elasomerových ložisek přímo ovlivňuje průběh vniřních sil v oblasi uložení, rozebereme v éo kapiole jednolivé možné
ZPŮSOBY MODELOVÁNÍ ELASTOMEROVÝCH LOŽISEK Vzhledem ke skuečnosi, že způsob modelování elasomerových ložisek přímo ovlivňuje průběh vniřních sil v oblasi uložení, rozebereme v éo kapiole jednolivé možné
ELEKTRONICKÉ OBVODY I
 NIVEZITA OBANY Fakula vojenských echnologií Kaedra elekroechniky -99 ELEKTONIKÉ OBVODY I čebnice Auoři: rof. Ing. Dalibor Biolek, Sc. rof. Ing. Karel Hájek, Sc. doc. Ing. Anonín Krička, Sc. doc. Ing. Karel
NIVEZITA OBANY Fakula vojenských echnologií Kaedra elekroechniky -99 ELEKTONIKÉ OBVODY I čebnice Auoři: rof. Ing. Dalibor Biolek, Sc. rof. Ing. Karel Hájek, Sc. doc. Ing. Anonín Krička, Sc. doc. Ing. Karel
7.5.13 Rovnice paraboly
 7.5.1 Rovnice arabol Předoklad: 751 Př. 1: Seiš všechn rovnice ro arabol a nakresli k nim odovídající obrázk. Na každém obrázku vznač vzdálenost. = = = = Pedagogická oznámka: Sesání arabol je důležité,
7.5.1 Rovnice arabol Předoklad: 751 Př. 1: Seiš všechn rovnice ro arabol a nakresli k nim odovídající obrázk. Na každém obrázku vznač vzdálenost. = = = = Pedagogická oznámka: Sesání arabol je důležité,
Vliv funkce příslušnosti na průběh fuzzy regulace
 XXVI. ASR '2 Seminar, Insrumens and Conrol, Osrava, April 26-27, 2 Paper 2 Vliv funkce příslušnosi na průběh fuzzy regulace DAVIDOVÁ, Olga Ing., Vysoké učení Technické v Brně, Fakula srojního inženýrsví,
XXVI. ASR '2 Seminar, Insrumens and Conrol, Osrava, April 26-27, 2 Paper 2 Vliv funkce příslušnosi na průběh fuzzy regulace DAVIDOVÁ, Olga Ing., Vysoké učení Technické v Brně, Fakula srojního inženýrsví,
POUŽITÍ PROGRAMU MATLAB SIMULINK A VIRTUAL REALITY TOOLBOXU PŘI NÁVRHU A EXPERIMENTÁLNÍM OVĚŘENÍ ŘÍZENÍ JEŘÁBOVÉ KOČKY. petr.noskievic@vsb.
 POUŽITÍ PROGRAMU MATAB SIMUIN A VIRTUA REAITY TOOBOXU PŘI NÁVRHU A EXPERIMENTÁNÍM OVĚŘENÍ ŘÍZENÍ JEŘÁBOVÉ OČY Doc.Ing.Per Nosievič,CSc., Ing.Milan VANĚ, Ing.arel STRNAD VŠB-TU Osrava, aula srojní, aedra
POUŽITÍ PROGRAMU MATAB SIMUIN A VIRTUA REAITY TOOBOXU PŘI NÁVRHU A EXPERIMENTÁNÍM OVĚŘENÍ ŘÍZENÍ JEŘÁBOVÉ OČY Doc.Ing.Per Nosievič,CSc., Ing.Milan VANĚ, Ing.arel STRNAD VŠB-TU Osrava, aula srojní, aedra
x udává hodnotu směrnice tečny grafu
 Předmě: Ročník: Vyvořil: Daum: MATEMATIKA ČTVRTÝ Mgr. Tomáš MAŇÁK 5. srpna Název zpracovaného celku: GEOMETRICKÝ VÝZNAM DERIVACE FUNKCE GEOMETRICKÝ VÝZNAM DERIVACE FUNKCE v bodě (ečny grafu funkcí) Je
Předmě: Ročník: Vyvořil: Daum: MATEMATIKA ČTVRTÝ Mgr. Tomáš MAŇÁK 5. srpna Název zpracovaného celku: GEOMETRICKÝ VÝZNAM DERIVACE FUNKCE GEOMETRICKÝ VÝZNAM DERIVACE FUNKCE v bodě (ečny grafu funkcí) Je
ČESKÁ SPOLEČNOST PRO JAKOST Novotného lávka 5, 116 68 Praha 1 ZAJIŠTĚNOST ÚDRŽBY MATERIÁLY ZE XIII. SETKÁNÍ ODBORNÉ SKUPINY PRO SPOLEHLIVOST
 ČESKÁ SPOLEČNOST PRO JAKOST Novoného lávka 5, 116 68 Praha 1 ZAJIŠTĚNOST ÚDRŽBY MATERIÁLY ZE XIII. SETKÁNÍ ODBORNÉ SKUPINY PRO SPOLEHLIVOST Praha, lisoad 2003 1 OBSAH OPTIMALIZACE PREVENTIVNÍ ÚDRŽBY Prof.
ČESKÁ SPOLEČNOST PRO JAKOST Novoného lávka 5, 116 68 Praha 1 ZAJIŠTĚNOST ÚDRŽBY MATERIÁLY ZE XIII. SETKÁNÍ ODBORNÉ SKUPINY PRO SPOLEHLIVOST Praha, lisoad 2003 1 OBSAH OPTIMALIZACE PREVENTIVNÍ ÚDRŽBY Prof.
Pasivní tvarovací obvody RC
 Sřední průmyslová škola elekroechnická Pardubice CVIČENÍ Z ELEKTRONIKY Pasivní varovací obvody RC Příjmení : Česák Číslo úlohy : 3 Jméno : Per Daum zadání : 7.0.97 Školní rok : 997/98 Daum odevzdání :
Sřední průmyslová škola elekroechnická Pardubice CVIČENÍ Z ELEKTRONIKY Pasivní varovací obvody RC Příjmení : Česák Číslo úlohy : 3 Jméno : Per Daum zadání : 7.0.97 Školní rok : 997/98 Daum odevzdání :
7.3.9 Směrnicový tvar rovnice přímky
 7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
Nakloněná rovina II
 1215 Nkloněná rovin II Předokldy: 1214 Pomůcky: siloměr 2,5 N, sd n měření řecí síly Pedoická oznámk: V éo následující hodině se nerobírá žádná nová lák Přeso jde o oměrně důležié hodiny, roože žáci se
1215 Nkloněná rovin II Předokldy: 1214 Pomůcky: siloměr 2,5 N, sd n měření řecí síly Pedoická oznámk: V éo následující hodině se nerobírá žádná nová lák Přeso jde o oměrně důležié hodiny, roože žáci se
MĚŘENÍ PLANCKOVY KONSTANTY
 MĚŘENÍ PLANCKOVY KONSTANTY Pomůcky: voltmetr DVP-BTA, amérmetr DCP-BTA, sektrometr SectroVis Plus s otickým vláknem SectroVis Otical Fiber, několik různých LED, zdroj naětí, reostat, sojovací vodiče, LabQuest,
MĚŘENÍ PLANCKOVY KONSTANTY Pomůcky: voltmetr DVP-BTA, amérmetr DCP-BTA, sektrometr SectroVis Plus s otickým vláknem SectroVis Otical Fiber, několik různých LED, zdroj naětí, reostat, sojovací vodiče, LabQuest,
Katedra aplikované matematiky FEI VŠB Technická univerzita Ostrava
 Lineární algebra 4. přednáška: Vekorové prosory Dalibor Lukáš Kaedra aplikované maemaiky FEI VŠB Technická univerzia Osrava email: dalibor.lukas@vsb.cz hp://www.am.vsb.cz/lukas/la Tex byl vyvořen v rámci
Lineární algebra 4. přednáška: Vekorové prosory Dalibor Lukáš Kaedra aplikované maemaiky FEI VŠB Technická univerzia Osrava email: dalibor.lukas@vsb.cz hp://www.am.vsb.cz/lukas/la Tex byl vyvořen v rámci
Analytická metoda aneb Využití vektorů v geometrii
 KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
a excentricita e; F 1 [0; 0], T [5; 2], K[3; 4], e = 3.
![a excentricita e; F 1 [0; 0], T [5; 2], K[3; 4], e = 3.](/thumbs/97/132104795.jpg "a excentricita e; F 1 [0; 0], T [5; 2], K[3; 4], e = 3.") Řešené úlohy na ohnisové vlasnosi uželoseče Řešené úlohy onsruce uželosečy z daných podmíne řílad: Sesroje uželoseču, je-li dáno její ohniso F 1, ečna = T s bodem T doyu a excenricia e; F 1 [0; 0], T [5;
Řešené úlohy na ohnisové vlasnosi uželoseče Řešené úlohy onsruce uželosečy z daných podmíne řílad: Sesroje uželoseču, je-li dáno její ohniso F 1, ečna = T s bodem T doyu a excenricia e; F 1 [0; 0], T [5;
Univerzita Pardubice FAKULTA CHEMICKO TECHNOLOGICKÁ
 Univerzita Pardubice FAKULA CHEMICKO ECHNOLOGICKÁ MEODY S LAENNÍMI PROMĚNNÝMI A KLASIFIKAČNÍ MEODY SEMINÁRNÍ PRÁCE LICENČNÍHO SUDIA Statistické zracování dat ři kontrole jakosti Ing. Karel Dráela, CSc.
Univerzita Pardubice FAKULA CHEMICKO ECHNOLOGICKÁ MEODY S LAENNÍMI PROMĚNNÝMI A KLASIFIKAČNÍ MEODY SEMINÁRNÍ PRÁCE LICENČNÍHO SUDIA Statistické zracování dat ři kontrole jakosti Ing. Karel Dráela, CSc.
Práce a výkon při rekuperaci
 Karel Hlava 1, Ladislav Mlynařík 2 Práce a výkon při rekuperaci Klíčová slova: jednofázová sousava 25 kv, 5 Hz, rekuperační brzdění, rekuperační výkon, rekuperační energie Úvod Trakční napájecí sousava
Karel Hlava 1, Ladislav Mlynařík 2 Práce a výkon při rekuperaci Klíčová slova: jednofázová sousava 25 kv, 5 Hz, rekuperační brzdění, rekuperační výkon, rekuperační energie Úvod Trakční napájecí sousava
 ú é ě ě ú ě š ě š š Š Í Č ě ú é ě ď ú Í ě é é ě ě ě ť ě ú ď ď ě ě Ý ě Ú š ě Ú š ď ď ěž é ú é ě ěž é ú é Č é é ě ě Ť ó š ď é é ěň ě é ě ú ě Č ě ě ě ě ě Ž ď ě š ď ž é ž ě Ž Ú é ě ď ě ě ž ě é ď š ú ě é ú
ú é ě ě ú ě š ě š š Š Í Č ě ú é ě ď ú Í ě é é ě ě ě ť ě ú ď ď ě ě Ý ě Ú š ě Ú š ď ď ěž é ú é ě ěž é ú é Č é é ě ě Ť ó š ď é é ěň ě é ě ú ě Č ě ě ě ě ě Ž ď ě š ď ž é ž ě Ž Ú é ě ď ě ě ž ě é ď š ú ě é ú
Newtonův zákon II
 1.2.4 1. Newonův záon II Předpolady: 1203 Pomůcy: rubice, papír. Př. 1: Rozhodni, eré z následujících vě můžeme chápa jao další formulace 1. Newonova záona. a) Je-li výslednice sil, eré působí na ěleso,
1.2.4 1. Newonův záon II Předpolady: 1203 Pomůcy: rubice, papír. Př. 1: Rozhodni, eré z následujících vě můžeme chápa jao další formulace 1. Newonova záona. a) Je-li výslednice sil, eré působí na ěleso,
Numerická integrace. b a. sin 100 t dt
 Numerická inegrace Mirko Navara Cenrum srojového vnímání kaedra kyberneiky FEL ČVUT Karlovo náměsí, budova G, mísnos 14a hp://cmpfelkcvucz/~navara/nm 1 lisopadu 18 Úloha: Odhadnou b a f() d na základě
Numerická inegrace Mirko Navara Cenrum srojového vnímání kaedra kyberneiky FEL ČVUT Karlovo náměsí, budova G, mísnos 14a hp://cmpfelkcvucz/~navara/nm 1 lisopadu 18 Úloha: Odhadnou b a f() d na základě
Lineární rovnice prvního řádu. Máme řešit nehomogenní lineární diferenciální rovnici prvního řádu. Funkce h(t) = 2
 = 2") Cvičení 1 Lineární rovnice prvního řádu 1. Najděe řešení Cauchyovy úlohy x + x g = cos, keré vyhovuje podmínce x(π) =. Máme nehomogenní lineární diferenciální ( rovnici prvního řádu. Funkce h() = g a q()
Cvičení 1 Lineární rovnice prvního řádu 1. Najděe řešení Cauchyovy úlohy x + x g = cos, keré vyhovuje podmínce x(π) =. Máme nehomogenní lineární diferenciální ( rovnici prvního řádu. Funkce h() = g a q()
7.3.9 Směrnicový tvar rovnice přímky
 739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
ZDROJ ELEKTRICKÉ ENERGIE VÝKONOVÝ SPÍNAČ. Skutečná hodnota. Obr. 1.1 Blokové schéma mechatronického systému
 . Základní ojmy mecharonických sysémů Pod ojmem mecharonický sysém rozumíme soubor elekromechanických vazeb a vzahů mezi racovním mechanismem a elekromechanickou sousavou viz obr... ZDROJ ELEKTRICKÉ ENERGIE
. Základní ojmy mecharonických sysémů Pod ojmem mecharonický sysém rozumíme soubor elekromechanických vazeb a vzahů mezi racovním mechanismem a elekromechanickou sousavou viz obr... ZDROJ ELEKTRICKÉ ENERGIE
10 Lineární elasticita
 1 Lineární elasicia Polymerní láky se deformují lineárně elasicky pouze v oblasi malých deformací a velmi pomalých deformací. Hranice mezi lineárním a nelineárním průběhem deformace (mez lineariy) závisí
1 Lineární elasicia Polymerní láky se deformují lineárně elasicky pouze v oblasi malých deformací a velmi pomalých deformací. Hranice mezi lineárním a nelineárním průběhem deformace (mez lineariy) závisí
( ) 1.7.8 Statika I. Předpoklady: 1707
 1.7.8 Statika I. Předpoklady: 1707") .7.8 Sik I Přeokly: 707 Peoická oznámk: Hoinu rozěluji n vě čási. V rvní čási (5 minu) očíáme rvní čyři říkly, ve ruhé (0 minu) zývjící ři. Př. : N koncích yče o hmonosi 0 k élce m jsou zvěšen závží o
.7.8 Sik I Přeokly: 707 Peoická oznámk: Hoinu rozěluji n vě čási. V rvní čási (5 minu) očíáme rvní čyři říkly, ve ruhé (0 minu) zývjící ři. Př. : N koncích yče o hmonosi 0 k élce m jsou zvěšen závží o
7. TRANSFORMÁTORY. 7.1 Štítkové údaje. 7.2 Měření odporů vinutí. 7.3 Měření naprázdno
 7. TRANSFORMÁTORY Pro zjednodušení budeme měření provádět na jednofázovém transformátoru. Na trojfázovém transformátoru provedeme pouze ontrolu jeho zapojení měřením hodinových úhlů. 7.1 Štítové údaje
7. TRANSFORMÁTORY Pro zjednodušení budeme měření provádět na jednofázovém transformátoru. Na trojfázovém transformátoru provedeme pouze ontrolu jeho zapojení měřením hodinových úhlů. 7.1 Štítové údaje
Těleso na nakloněné rovině Dvě tělesa spojená tyčí Kyvadlo
 TEORETICKÁ MECHANIKA INTEGRÁLNÍ PRINCIPY MECHANIKY Záladní pojmy z mechaniy Mechanicý systém: jaáoli soustava částic nebo těles teré se rozhodneme popisovat (eletron atom Zeměoule planetární systém ).
TEORETICKÁ MECHANIKA INTEGRÁLNÍ PRINCIPY MECHANIKY Záladní pojmy z mechaniy Mechanicý systém: jaáoli soustava částic nebo těles teré se rozhodneme popisovat (eletron atom Zeměoule planetární systém ).
GEOMETRICKÉ PROJEKCE. Petra Surynková, Yulianna Tolkunova
 GEOMETRICKÉ PROJEKCE S VYUŽITÍM 3D POČÍTAČOVÉHO MODELOVÁNÍ Petra Surynková, Yulianna Tolkunova Článek ojednává o realizovaných metodách inovace výuky deskritivní geometrie na Matematicko-fyzikální fakultě
GEOMETRICKÉ PROJEKCE S VYUŽITÍM 3D POČÍTAČOVÉHO MODELOVÁNÍ Petra Surynková, Yulianna Tolkunova Článek ojednává o realizovaných metodách inovace výuky deskritivní geometrie na Matematicko-fyzikální fakultě
Teorie obnovy. Obnova
 Teorie obnovy Meoda operačního výzkumu, kerá za pomocí maemaických modelů zkoumá problémy hospodárnosi, výměny a provozuschopnosi echnických zařízení. Obnova Uskuečňuje se až po uplynuí určiého času činnosi
Teorie obnovy Meoda operačního výzkumu, kerá za pomocí maemaických modelů zkoumá problémy hospodárnosi, výměny a provozuschopnosi echnických zařízení. Obnova Uskuečňuje se až po uplynuí určiého času činnosi
Spektrum 1. Spektrum 2. Výsledné Spektrum. Jan Malinský
 Jan Malinsý V omo doumenu bude odvozeno sperum vysenuého sinusového signálu pomocí onvoluce ve frevenční oblasi. V časové oblasi e možno eno vysenuý signál vyvoři násobením obdélníového ( V a sinusového
Jan Malinsý V omo doumenu bude odvozeno sperum vysenuého sinusového signálu pomocí onvoluce ve frevenční oblasi. V časové oblasi e možno eno vysenuý signál vyvoři násobením obdélníového ( V a sinusového
Složité systémy řízení
 VYSOKÁ ŠKOLA BAŇSKÁ - ECHNICKÁ UNIVERZIA OSRAVA Faula srojní Složié sysémy řízení I. Díl: Regulace sousav s náhodnými poruchami ing. Jiří ůma, CSc. Prosinec 997 Leoroval: Doc. RNDr. Jaroslav Marl Ing.
VYSOKÁ ŠKOLA BAŇSKÁ - ECHNICKÁ UNIVERZIA OSRAVA Faula srojní Složié sysémy řízení I. Díl: Regulace sousav s náhodnými poruchami ing. Jiří ůma, CSc. Prosinec 997 Leoroval: Doc. RNDr. Jaroslav Marl Ing.
Hodnocení přesnosti výsledků z metody FMECA
 Hodnocení přesnosti výsledů z metody FMECA Josef Chudoba 1. Úvod Metoda FMECA je semivantitativní metoda, pomocí teré se identifiují poruchy s významnými důsledy ovlivňující funci systému. Závažnost následů
Hodnocení přesnosti výsledů z metody FMECA Josef Chudoba 1. Úvod Metoda FMECA je semivantitativní metoda, pomocí teré se identifiují poruchy s významnými důsledy ovlivňující funci systému. Závažnost následů
Způsobilost. Data a parametry. Menu: QCExpert Způsobilost
 Zůsobilost Menu: QExert Zůsobilost Modul očítá na základě dat a zadaných secifikačních mezí hodnoty různých indexů zůsobilosti (caability index, ) a výkonnosti (erformance index, ). Dále jsou vyočítány
Zůsobilost Menu: QExert Zůsobilost Modul očítá na základě dat a zadaných secifikačních mezí hodnoty různých indexů zůsobilosti (caability index, ) a výkonnosti (erformance index, ). Dále jsou vyočítány
 ě Á Á é é ě ě ě ú é é é ě é é ď ď ď š š Č Á ě ú Á ď š ě Č ě š ěž ě é ě ě ě ě ě ě Č Á ě Á é ú Ž é š ě š š é Ž ě é š é Š ť Ž ě Č Á ú Á Ť é ě é š ě ě š š ď ď Č é š š Č ě ě ú ě ú Ť é ě š ě ě š ě š ě ě ú ě
ě Á Á é é ě ě ě ú é é é ě é é ď ď ď š š Č Á ě ú Á ď š ě Č ě š ěž ě é ě ě ě ě ě ě Č Á ě Á é ú Ž é š ě š š é Ž ě é š é Š ť Ž ě Č Á ú Á Ť é ě é š ě ě š š ď ď Č é š š Č ě ě ú ě ú Ť é ě š ě ě š ě š ě ě ú ě
Dynamika hmotného bodu. Petr Šidlof
 Per Šidlof Úvod opakování () saika DYNAMIKA kinemaika Dynamika hmoného bodu Dynamika uhého ělesa Dynamika elasických ěles Teorie kmiání Aranz/Bombardier (Norwegian BM73) Před Galileem, Newonem: k udržení
Per Šidlof Úvod opakování () saika DYNAMIKA kinemaika Dynamika hmoného bodu Dynamika uhého ělesa Dynamika elasických ěles Teorie kmiání Aranz/Bombardier (Norwegian BM73) Před Galileem, Newonem: k udržení
Využití programového systému MATLAB pro řízení laboratorního modelu
 Využií programového sysému MATLAB pro řízení laboraorního modelu WAGNEROVÁ, Renaa 1, KLANER, Per 2 1 Ing., Kaedra ATŘ-352, VŠB-TU Osrava, 17. lisopadu, Osrava - Poruba, 78 33, renaa.wagnerova@vsb.cz, 2
Využií programového sysému MATLAB pro řízení laboraorního modelu WAGNEROVÁ, Renaa 1, KLANER, Per 2 1 Ing., Kaedra ATŘ-352, VŠB-TU Osrava, 17. lisopadu, Osrava - Poruba, 78 33, renaa.wagnerova@vsb.cz, 2
V p-v diagramu je tento proces znázorněn hyperbolou spojující body obou stavů plynu, je to tzv. izoterma :
 Jednoduché vratné děje ideálního lynu ) Děj izoter mický ( = ) Za ředokladu konstantní teloty se stavová rovnice ro zadané množství lynu změní na známý zákon Boylův-Mariottův, která říká, že součin tlaku
Jednoduché vratné děje ideálního lynu ) Děj izoter mický ( = ) Za ředokladu konstantní teloty se stavová rovnice ro zadané množství lynu změní na známý zákon Boylův-Mariottův, která říká, že součin tlaku
zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, napájen do kotvy, indukčnost zanedbáme.
 Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
NÁVRH A OVĚŘENÍ BETONOVÉ OPŘENÉ PILOTY ZATÍŽENÉ V HLAVĚ KOMBINACÍ SIL
 NÁVRH A OVĚŘENÍ BETONOVÉ OPŘENÉ PILOTY ZATÍŽENÉ V HLAVĚ KOMBINACÍ SIL 1. ZADÁNÍ Navrhněte růměr a výztuž vrtané iloty délky L neosuvně ořené o skalní odloží zatížené v hlavě zadanými vnitřními silami (viz
NÁVRH A OVĚŘENÍ BETONOVÉ OPŘENÉ PILOTY ZATÍŽENÉ V HLAVĚ KOMBINACÍ SIL 1. ZADÁNÍ Navrhněte růměr a výztuž vrtané iloty délky L neosuvně ořené o skalní odloží zatížené v hlavě zadanými vnitřními silami (viz
ZÁKLADY ELEKTRICKÝCH POHONŮ (EP) Určeno pro posluchače bakalářských studijních programů FS
 Určeno pro posluchače bakalářských studijních programů FS") ZÁKLADY ELEKTRICKÝCH OHONŮ (E) Určeno pro posluchače bakalářských sudijních programů FS Obsah 1. Úvod (definice, rozdělení, provozní pojmy,). racovní savy pohonu 3. Základy mechaniky a kinemaiky pohonu
ZÁKLADY ELEKTRICKÝCH OHONŮ (E) Určeno pro posluchače bakalářských sudijních programů FS Obsah 1. Úvod (definice, rozdělení, provozní pojmy,). racovní savy pohonu 3. Základy mechaniky a kinemaiky pohonu
Výpočet svislé únosnosti osamělé piloty
 Inženýrský manuál č. 13 Aktualizace: 04/2016 Výočet svislé únosnosti osamělé iloty Program: Soubor: Pilota Demo_manual_13.gi Cílem tohoto inženýrského manuálu je vysvětlit oužití rogramu GEO 5 PILOTA ro
Inženýrský manuál č. 13 Aktualizace: 04/2016 Výočet svislé únosnosti osamělé iloty Program: Soubor: Pilota Demo_manual_13.gi Cílem tohoto inženýrského manuálu je vysvětlit oužití rogramu GEO 5 PILOTA ro
2 HODINY. ? Na kolik trojúhelník Ti úhlopíka rozdlí AC lichobžník ABCD? Na dva trojúhelníky ABC, ACD
 K O N S T R U K E L I H O B Ž N Í K U 2 HOINY Než istouíš samotným onstrucím, zoauj si nejdíve vše, co víš o lichobžnících co to vlastn lichobžní je, záladní druhy lichobžní a jejich vlastnosti. ále si
K O N S T R U K E L I H O B Ž N Í K U 2 HOINY Než istouíš samotným onstrucím, zoauj si nejdíve vše, co víš o lichobžnících co to vlastn lichobžní je, záladní druhy lichobžní a jejich vlastnosti. ále si
Algoritmy a rasterizace 2D grafických objektů
 Algorimy a raserizace D graficých objeů Algorihms and raserizaion of D graphical objecs Jan Sečař Baalářsá práce 007 *** nascannované zadání sr. *** *** nascannované zadání sr. *** UTB ve Zlíně, Faula
Algorimy a raserizace D graficých objeů Algorihms and raserizaion of D graphical objecs Jan Sečař Baalářsá práce 007 *** nascannované zadání sr. *** *** nascannované zadání sr. *** UTB ve Zlíně, Faula
2.2.2 Měrná tepelná kapacita
 .. Měrná epelná kapacia Předpoklady: 0 Pedagogická poznámka: Pokud necháe sudeny počía příklady samosaně, nesihnee hodinu za 45 minu. Můžee využí oho, že následující hodina je aké objemnější a použí pro
.. Měrná epelná kapacia Předpoklady: 0 Pedagogická poznámka: Pokud necháe sudeny počía příklady samosaně, nesihnee hodinu za 45 minu. Můžee využí oho, že následující hodina je aké objemnější a použí pro
SLOVNÍ ÚLOHY VEDOUCÍ K ŘEŠENÍ KVADRATICKÝCH ROVNIC
 Projek ŠABLONY NA GVM Gymnázium Velké Meziříčí regisrační číslo projeku: CZ..0/.5.00/4.0948 IV- Inovace a zkvalinění výuky směřující k rozvoji maemaické gramonosi žáků sředních škol SLOVNÍ ÚLOHY VEDOUCÍ
Projek ŠABLONY NA GVM Gymnázium Velké Meziříčí regisrační číslo projeku: CZ..0/.5.00/4.0948 IV- Inovace a zkvalinění výuky směřující k rozvoji maemaické gramonosi žáků sředních škol SLOVNÍ ÚLOHY VEDOUCÍ
KMA/P506 Pravděpodobnost a statistika KMA/P507 Statistika na PC
 Přednáša 04 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Záon velých čísel Lemma Nechť náhodná veličina nabývá pouze nezáporných
Přednáša 04 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Záon velých čísel Lemma Nechť náhodná veličina nabývá pouze nezáporných
ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE PROVOZNĚ EKONOMICKÁ FAKULTA DOKTORSKÁ DISERTAČNÍ PRÁCE
 ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE PROVOZNĚ EKONOMICKÁ FAKULTA DOKTORSKÁ DISERTAČNÍ PRÁCE VYTVÁŘENÍ TRŽNÍ ROVNOVÁHY VYBRANÝCH ZEMĚDĚLSKO-POTRAVINÁŘSKÝCH PRODUKTŮ Ing. Michal Malý Školiel: Prof. Ing. Jiří
ČESKÁ ZEMĚDĚLSKÁ UNIVERZITA V PRAZE PROVOZNĚ EKONOMICKÁ FAKULTA DOKTORSKÁ DISERTAČNÍ PRÁCE VYTVÁŘENÍ TRŽNÍ ROVNOVÁHY VYBRANÝCH ZEMĚDĚLSKO-POTRAVINÁŘSKÝCH PRODUKTŮ Ing. Michal Malý Školiel: Prof. Ing. Jiří
Seznámíte se s principem integrace substituční metodou a se základními typy integrálů, které lze touto metodou vypočítat.
 4 Inegrace subsiucí 4 Inegrace subsiucí Průvodce sudiem Inegrály, keré nelze řeši pomocí základních vzorců, lze velmi časo řeši subsiuční meodou Vzorce pro derivace elemenárních funkcí a věy o derivaci
4 Inegrace subsiucí 4 Inegrace subsiucí Průvodce sudiem Inegrály, keré nelze řeši pomocí základních vzorců, lze velmi časo řeši subsiuční meodou Vzorce pro derivace elemenárních funkcí a věy o derivaci
Cvičení z termomechaniky Cvičení 5.
 Příklad V komresoru je kontinuálně stlačován objemový tok vzduchu *m 3.s- + o telotě 0 * C+ a tlaku 0, *MPa+ na tlak 0,7 *MPa+. Vyočtěte objemový tok vzduchu vystuujícího z komresoru, jeho telotu a říkon
Příklad V komresoru je kontinuálně stlačován objemový tok vzduchu *m 3.s- + o telotě 0 * C+ a tlaku 0, *MPa+ na tlak 0,7 *MPa+. Vyočtěte objemový tok vzduchu vystuujícího z komresoru, jeho telotu a říkon
 š Č ú ř úó ď ů ř ř ř ů ů š ů ů ů řš ř ů ř ů ř ó ř ú ů ů ů ú ů ů ů ů ř ů ů ú ú ř ů ř ů ř ň ř ů ř ř ř ř ň ř ů ř ř ř ř ř ů ř ú ř ř ř ř ř ř ř ř ú ř Ů ř ř Ó š ů š úó Č ó ř ú ú ř ů ř ó ň ú ů ú ř ř úó ů ř ů ó
š Č ú ř úó ď ů ř ř ř ů ů š ů ů ů řš ř ů ř ů ř ó ř ú ů ů ů ú ů ů ů ů ř ů ů ú ú ř ů ř ů ř ň ř ů ř ř ř ř ň ř ů ř ř ř ř ř ů ř ú ř ř ř ř ř ř ř ř ú ř Ů ř ř Ó š ů š úó Č ó ř ú ú ř ů ř ó ň ú ů ú ř ř úó ů ř ů ó
Metodika transformace ukazatelů Bilancí národního hospodářství do Systému národního účetnictví
 Vysoká škola ekonomická v Praze Fakula informaiky a saisiky Kaedra ekonomické saisiky Meodika ransformace ukazaelů Bilancí národního hospodářsví do Sysému národního účenicví Ing. Jaroslav Sixa, Ph.D. Doc.
Vysoká škola ekonomická v Praze Fakula informaiky a saisiky Kaedra ekonomické saisiky Meodika ransformace ukazaelů Bilancí národního hospodářsví do Sysému národního účenicví Ing. Jaroslav Sixa, Ph.D. Doc.
22. Mechanické a elektromagnetické kmity
 . Mechanicé a eletromagneticé mity. Mechanicé mity Mechanicé mitání je jev, při terém se periodicy mění fyziální veličiny popisující mitavý pohyb. Oscilátor těleso, teré je schopné mitat, (mitání způsobuje
. Mechanicé a eletromagneticé mity. Mechanicé mity Mechanicé mitání je jev, při terém se periodicy mění fyziální veličiny popisující mitavý pohyb. Oscilátor těleso, teré je schopné mitat, (mitání způsobuje
3.3.4 Thaletova věta. Předpoklady:
 3.3.4 Thaletova věta Předpolady: 030303 Př. : Narýsuj ružnici ( ;5cm) a její průměr. Na ružnici narýsuj libovolný bod různý od bodů, (bod zvol jina než soused v lavici). Narýsuj trojúhelní. Má nějaou speciální
3.3.4 Thaletova věta Předpolady: 030303 Př. : Narýsuj ružnici ( ;5cm) a její průměr. Na ružnici narýsuj libovolný bod různý od bodů, (bod zvol jina než soused v lavici). Narýsuj trojúhelní. Má nějaou speciální
e) U ( ) ( ) r 1.1. Ř EŠENÉPŘ ÍKLADY PDF byl vytvořen zkušebníverzífineprint pdffactory
 U ( ) ( ) r 1.1. Ř EŠENÉPŘ ÍKLADY PDF byl vytvořen zkušebníverzífineprint pdffactory") . Signá ly se souvislým časem Ř EŠENÉPŘ ÍKLADY r.. a) Urč ee sřednía eeivníhodnou signálů na obr.., jejich výon a energii za č as =. d) = b) e), 5ms c) ),5V -,5V Obr... Analyzované signály. Sředníhodnoa:
. Signá ly se souvislým časem Ř EŠENÉPŘ ÍKLADY r.. a) Urč ee sřednía eeivníhodnou signálů na obr.., jejich výon a energii za č as =. d) = b) e), 5ms c) ),5V -,5V Obr... Analyzované signály. Sředníhodnoa:
 ý ú Ú Ú ý ý ý Ž ý ý ý ý ý ý ý ý ý ý ý ý ý ý ý Ž ř Á ý ý ý ů Ž ř ý ý ý ý ý ý ý ý ý ý ý ý Ž ý ř ý ý Ž Ů ž Ů ý ř ý ý ó ó Ú Ú Ž ý ý Ů ý ý Ů Á ý ý ý Ú Ý Ý ý Ů ý ů Ž ý ř Ů ý Ž ý ý ý ř ž Ž Ž ř š ň ř ů ř ň ř ř
ý ú Ú Ú ý ý ý Ž ý ý ý ý ý ý ý ý ý ý ý ý ý ý ý Ž ř Á ý ý ý ů Ž ř ý ý ý ý ý ý ý ý ý ý ý ý Ž ý ř ý ý Ž Ů ž Ů ý ř ý ý ó ó Ú Ú Ž ý ý Ů ý ý Ů Á ý ý ý Ú Ý Ý ý Ů ý ů Ž ý ř Ů ý Ž ý ý ý ř ž Ž Ž ř š ň ř ů ř ň ř ř
LS Příklad 1.1 (Vrh tělesem svisle dolů). Těleso o hmotnosti m vrhneme svisle
. Těleso o hmotnosti m vrhneme svisle") Obyčejné diferenciální rovnice Jiří Fišer LS 2014 1 Úvodní moivační příklad Po prosudování éo kapioly zjisíe, k čemu mohou bý diferenciální rovnice užiečné. Jak se pomocí nich dá modelova prakický problém,
Obyčejné diferenciální rovnice Jiří Fišer LS 2014 1 Úvodní moivační příklad Po prosudování éo kapioly zjisíe, k čemu mohou bý diferenciální rovnice užiečné. Jak se pomocí nich dá modelova prakický problém,
transformace Idea afinního prostoru Definice afinního prostoru velké a stejně orientované.
 finní ransformace je posunuí plus lineární ransformace má svou maici vzhledem k homogenním souřadnicím využií například v počíačové grafice [] Idea afinního prosoru BI-LIN, afinia, 3, P. Olšák [2] Lineární
finní ransformace je posunuí plus lineární ransformace má svou maici vzhledem k homogenním souřadnicím využií například v počíačové grafice [] Idea afinního prosoru BI-LIN, afinia, 3, P. Olšák [2] Lineární
Porovnání způsobů hodnocení investičních projektů na bázi kritéria NPV
 3 mezinárodní konference Řízení a modelování finančních rizik Osrava VŠB-U Osrava, Ekonomická fakula, kaedra Financí 6-7 září 2006 Porovnání způsobů hodnocení invesičních projeků na bázi kriéria Dana Dluhošová
3 mezinárodní konference Řízení a modelování finančních rizik Osrava VŠB-U Osrava, Ekonomická fakula, kaedra Financí 6-7 září 2006 Porovnání způsobů hodnocení invesičních projeků na bázi kriéria Dana Dluhošová
Vstupní tok požadavků
 Vsupní o požadavů Bodový proces, záladní ypy procesů Bodový proces Sledujeme chod určiého procesu, v němž čas od času dochází jisé význačné událosi posloupnos časových oamžiů = 1 3 4 proces deerminován
Vsupní o požadavů Bodový proces, záladní ypy procesů Bodový proces Sledujeme chod určiého procesu, v němž čas od času dochází jisé význačné událosi posloupnos časových oamžiů = 1 3 4 proces deerminován
7. Měření dutých objemů pomocí komprese plynu a určení Poissonovy konstanty vzduchu Úkol 1: Určete objem skleněné láhve s kohoutem kompresí plynu.
 7. Měření dutých objemů omocí komrese lynu a určení Poissonovy konstanty vzduchu Úkol : Určete objem skleněné láhve s kohoutem komresí lynu. Pomůcky Měřený objem (láhev s kohoutem), seciální lynová byreta
7. Měření dutých objemů omocí komrese lynu a určení Poissonovy konstanty vzduchu Úkol : Určete objem skleněné láhve s kohoutem komresí lynu. Pomůcky Měřený objem (láhev s kohoutem), seciální lynová byreta
MOMENT SETRVAČNOSTI. Obecná část Pomocí Newtonova pohybového zákona síly můžeme odvodit pohybovou rovnici pro rotační pohyb:
 MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
UNIVERZITA PARDUBICE Fakulta elektrotechniky a informatiky STAVOVÁ REGULACE SOUSTAVY MOTOR GENERÁTOR. Bc. David Mucha
 UNIVERZITA PARDUBICE Fakula elekroechniky a informaiky STAVOVÁ REGULACE SOUSTAVY MOTOR GENERÁTOR Bc. David Mucha Diplomová práce 2017 Prohlášení Prohlašuji: Tuo práci jsem vypracoval samosaně. Veškeré
UNIVERZITA PARDUBICE Fakula elekroechniky a informaiky STAVOVÁ REGULACE SOUSTAVY MOTOR GENERÁTOR Bc. David Mucha Diplomová práce 2017 Prohlášení Prohlašuji: Tuo práci jsem vypracoval samosaně. Veškeré
PROJEKT III. (IV.) - Vzduchotechnika. 2. Návrh klimatizačních systémů
 - Vzduchotechnika. 2. Návrh klimatizačních systémů") ROJKT. (V.) - Vzduchoechnika. Návrh klimaizačních sysémů Auor: Organizace: -mail: Web: ng. Vladimír Zmrhal, h.d. České vysoké učení echnické v raze Fakula srojní Úsav echniky rosředí Vladimir.Zmrhal@fs.cvu.cz
ROJKT. (V.) - Vzduchoechnika. Návrh klimaizačních sysémů Auor: Organizace: -mail: Web: ng. Vladimír Zmrhal, h.d. České vysoké učení echnické v raze Fakula srojní Úsav echniky rosředí Vladimir.Zmrhal@fs.cvu.cz
Směrová kalibrace pětiotvorové kuželové sondy
 Směrová kalibrace ětiotvorové kuželové sondy Matějka Milan Ing., Ústav mechaniky tekutin a energetiky, Fakulta strojní, ČVUT v Praze, Technická 4, 166 07 Praha 6, milan.matejka@fs.cvut.cz Abstrakt: The
Směrová kalibrace ětiotvorové kuželové sondy Matějka Milan Ing., Ústav mechaniky tekutin a energetiky, Fakulta strojní, ČVUT v Praze, Technická 4, 166 07 Praha 6, milan.matejka@fs.cvut.cz Abstrakt: The
4. LOCK-IN ZESILOVAČE
 4. LOCK-IN ZESILOVAČE Záladní princip Fázově cilivý deeor (PSD) s řízeným směrňovačem - vlasnosi Fázově cilivý deeor (PSD) s číslicovým zpracováním signál - vlasnosi Vysoofrevenční Loc-in zesilovač X38SMP
4. LOCK-IN ZESILOVAČE Záladní princip Fázově cilivý deeor (PSD) s řízeným směrňovačem - vlasnosi Fázově cilivý deeor (PSD) s číslicovým zpracováním signál - vlasnosi Vysoofrevenční Loc-in zesilovač X38SMP
VYUŽITÍ MATLABU JAKO MOTIVAČNÍHO PROSTŘEDKU VE VÝUCE FYZIKY NA STŘEDNÍCH ŠKOLÁCH
 VYUŽITÍ MATLABU JAKO MOTIVAČNÍHO PROSTŘEDKU VE VÝUCE FYZIKY NA STŘEDNÍCH ŠKOLÁCH J. Tesař, P. Batoš Jihočesá univezita, Pedagogicá faulta, Kateda fyziy, Jeonýmova 0, 37 5 Česé Budějovice Abstat V příspěvu
VYUŽITÍ MATLABU JAKO MOTIVAČNÍHO PROSTŘEDKU VE VÝUCE FYZIKY NA STŘEDNÍCH ŠKOLÁCH J. Tesař, P. Batoš Jihočesá univezita, Pedagogicá faulta, Kateda fyziy, Jeonýmova 0, 37 5 Česé Budějovice Abstat V příspěvu