Optimální ustálený chod Optima Power Flow -OPF
|
|
|
- Andrea Tomanová
- před 6 lety
- Počet zobrazení:
Transkript
1 1 Optimalizace režimu sítě-newtonovský přístup Optimální ustálený chod Optima Power Flow -OPF C i (P i ) cena výroby i-tého zdroe Cílové funkce: 1. minimalizace přenosových ztrát. minimum ceny vyráběné energie 3. alokace kompenzačních výkonů 4. minimalizace ekologických vlivů 5. optimalizace výkonových rezerv omez. podmínky typu rovnosti, nerovnosti e ( x) N ( x) =, Omezení veličin a funkčních hodnot x x x, Φ Φ Φ
2 Optimalizace režimu sítě-newtonovský přístup Algoritmus separátního řešení 1) iniciace startovacího bodu ρ, λ, ν,k= ) řešení ustáleného stavu e ( σ, ρ ) = σ (BPF-výpočet ) 3) Je-li režim optimální pak konec inak pokraču 4) aproximace (P,QP) cílové funkce a omezuících podmínek k:=k+1; 5) optimalizace ξ (k), návrat do bodu
3 3 Optimalizace režimu sítě-newtonovský přístup Algoritmus Integrovaného řešení agrangián: T T T T ( ξ ) = f() x + μb B + μp. P + λ e+ ν N ξ = x, λν, Algoritmus řešení: 1. Iniciace. k=, ξ = ξ, μ, b = μ μ b p = μp ( k) ξ. Výpočet, určení akt. Γ a 1. Je-li režim optimální pak konec inak pokraču. generace rovnic (stanovení 3. řešení rovnic ( ξ ( k ) ) Δ ξ ( k ) = ( k ), 4. aktualizace ξ, μp, μb k=k+1, návrat na. J ( k), H ( k), ( ξ ( k)
4 4 Optimalizace režimu sítě-newtonovský přístup ξ T,, Příklad uspořádání: ( w) ( w) act λ act ( ) ( ( ) ( )) λ. w p act T T P λ P P Q Q P Q ( w ) act ( k). Q ( k) Q ( k) η η ( ) ( ) + x x l + x x l T T T T T δ t λp λ Q = PQP N Nt PQP PQ = P + k P k P k + k PQP + λq + k PQ l η = + + = logická veličina indikuící aktivnost omezení = penalizační koeficient aktivního omezení
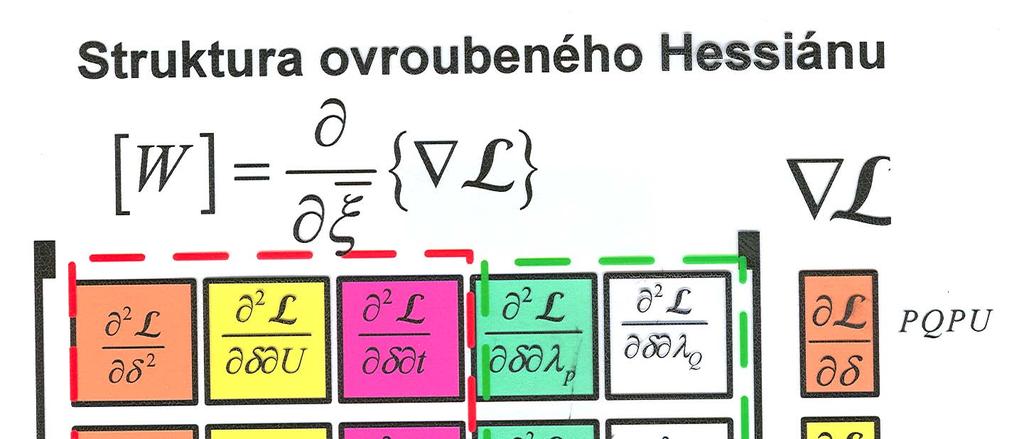
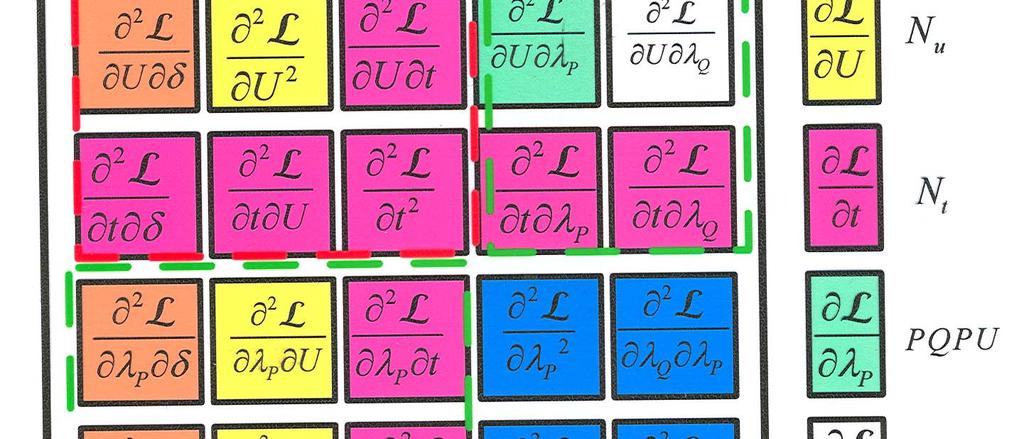
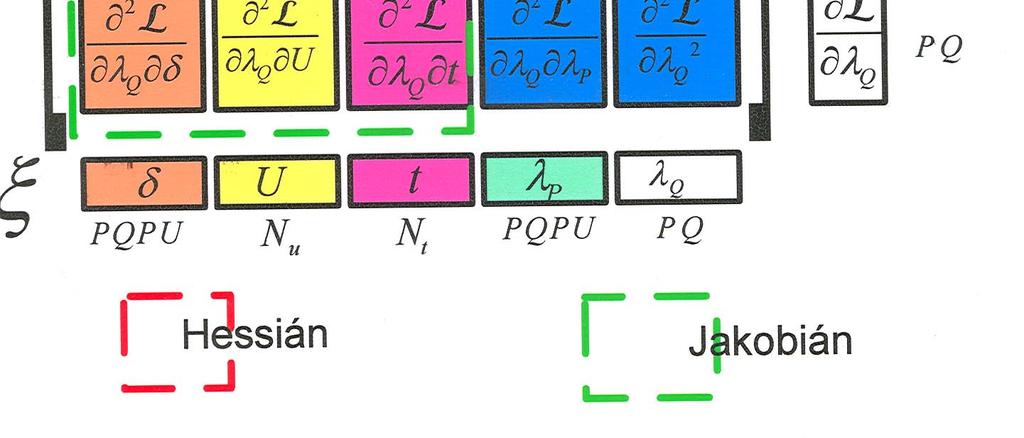
5 5 Optimalizace režimu sítě-newtonovský přístup Newtonova metoda optimalizace (postupné kvadratické programování) ustálený chod: def. S OPF : T. e ( ) ( ) = f ρ, s + λ ρ, s + μ. Γa.. agrangeova funkce a a množina aktivních omezení ξ T = ρ T, σ T, λ T... vektor proměných ρ ρ ρ σ ρ λ Δρ ρ H J T σ σ ρ σ σ σ λ Δ = σ Δλ ρ σ λ λ λ J λ λ =... gradient agrangiánu ξ [ W ] { } ξ = =... ovroubený Hessián ξ ξ

6 6 Optimalizace režimu sítě-newtonovský přístup
7 7 Optimalizace režimu sítě-newtonovský přístup
8 8 Optimalizace režimu sítě-newtonovský přístup P T Pact T Q = + λ act p + λq + xk xk xk xk P = + { λp( k). Pact ( k) } + xk xk x k PQP k { ( ). ( )} + λ k Q k x l x l q act + η + η k PQ xk P T Pact T Q = + λ act p + λq xi. v xi. v xi. x xi. x P = + xi. x xi. x xi. x k PQP { λp( k). Pact ( k) } + + { λ ( k). Q q act ( k) } + η xl xl x. x + η k PQ i
9 9 Optimalizace režimu sítě-newtonovský přístup OPF-IP opt x D x { f ( x) } x: ( x) =, D ( ) x = N N x N x x x N x N N ( ) ( ) = N x + N N = 1) N + N N + N =, ) x + x = x x x = x e + = x x x x nezápornost : x, x, N, N
10 1 Optimalizace režimu sítě-newtonovský přístup Rovnice pro řešení: { e } = = f x + x ( ) ( ) x x x { T ( )} ( ) xn x λn λx μ x x 1 = = λ λ + μ N N N % 1 = = λ + μ N N % = = λ + μ x x = = λ ( ) [ ] % 1 = = ( x ) λ = = x x x λ N x = = λ x x λ + + e N N N N N N N 1
11 11 Optimalizace režimu sítě-newtonovský přístup % konstrukce obroubeného hessianu. radkuj=size(j,1);nulaw=zeros(radkuj,radkuj); % pravy spodni roh matice W H=sparse(N,N);HD=H;HDD=H; % iniciace H for Ip=1:size(II,1), % pro nenulový prvek matice Y k=ii(ip); m=jj(ip); % indexy v matici Y (spoené uzly) ya=ym(ip);dkm=deltakm(ip); % modul a uhel if k~=m % nediagonální prvky Sk_k_m =ya*exp(i*dkm); Sk_k_Dm =-i*a(m)*ya*exp(i*dkm); Sk_m_Dk =i*a(k)*ya*exp(i*dkm); Sk_m_Dm =-Sk_m_Dk ; Sk_Dk_Dm =a(m)*a(k)*ya*exp(i*dkm); Sk_Dm_Dm =-Sk_Dk_Dm ; Sk_m_m =; if T(k)==3 %pro uzel typu Slack H(k,m)=H(k,m)+real(Sk_k_m); HD(k,m)=HD(k,m)+real(Sk_k_Dm); HDD(k,m)=HDD(k,m)+real(Sk_Dk_Dm); H(m,k)=H(m,k)+real(Sk_k_m); HD(m,k)=HD(m,k)+real(Sk_m_Dk); HDD(m,k)=HDD(m,k)+real(Sk_Dk_Dm); H(m,m)=H(m,m)+real(Sk_m_m); HD(m,m)=HD(m,m)+real(Sk_m_Dm); HDD(m,m)=HDD(m,m)+real(Sk_Dm_Dm); end %if T(k)==3 if T(k)~=3 %pro uzly typu PQP H(m,k)=H(m,k)-real(Sk_k_m)*P(k); HD(m,k)=HD(m,k)-real(Sk_m_Dk)*P(k); HDD(m,k)=HDD(m,k)- real(sk_dk_dm)*p(k); H(k,m)=H(k,m)- real(sk_k_m)*p(k); HD(k,m)=HD(k,m)-real(Sk_k_Dm)*P(k);
12 1 Optimalizace režimu sítě-newtonovský přístup HDD(k,m)=HDD(k,m)- real(sk_dk_dm)*p(k); H(m,m)=H(m,m)-real(Sk_m_m)*P(k); HD(m,m)=HD(m,m)-real(Sk_m_Dm)*P(k); HDD(m,m)=HDD(m,m)-real(Sk_Dm_Dm)*P(k); end %if T(k)~=3 if T(k)==1 %pro uzly typu PQ H(m,k)=H(m,k)- imag(sk_k_m)*q(k); HD(m,k)=HD(m,k)- imag(sk_m_dk)*q(k); HDD(m,k)=HDD(m,k)- imag(sk_dk_dm)*q(k); H(k,m)=H(k,m)-imag(Sk_k_m)*Q(k); HD(k,m)=HD(k,m)- imag(sk_k_dm)*q(k); HDD(k,m)=HDD(k,m)- imag(sk_dk_dm)*q(k); H(m,m)=H(m,m)-imag(Sk_m_m)*Q(k); HD(m,m)=HD(m,m)- imag(sk_m_dm)*q(k); HDD(m,m)=HDD(m,m)- imag(sk_dm_dm)*q(k); end %if T(k)==1 % diagonální prvky k=m Sk_k_k=*ya*exp(i*Dkm); Sk_Dk_Dk=-Sact(k)+a(k)^*ya*exp(i*Dkm); Sk_k_Dk=i*(Sact(k)/a(k)-a(k)*ya*exp(i*Dkm)); if T(k)==3 %pro uzel typu Slack H(k,k)=H(k,k)+real(Sk_k_k); HD(k,k)=HD(k,k)+real(Sk_k_Dk); HDD(k,k)=HDD(k,k)+real(Sk_Dk_Dk);
13 13 Optimalizace režimu sítě-newtonovský přístup end % if T(k)==3 if T(k)~=3 %pro uzly typu PQP H(k,k)=H(k,k)-real(Sk_k_k)*P(k); HD(k,k)=HD(k,k)-real(Sk_k_Dk)*P(k); HDD(k,k)=HDD(k,k)-real(Sk_Dk_Dk)*P(k); end %if T(k)~=3 if T(k)==1 %pro uzly typu PQ H(k,k)=H(k,k)-imag(Sk_k_k)*Q(k); HD(k,k)=HD(k,k)-imag(Sk_k_Dk)*Q(k); HDD(k,k)=HDD(k,k)-imag(Sk_Dk_Dk)*Q(k); end %if T(k)==1 end %if k~=m end %for Ip for k=vse H(k,k)=H(k,k)+H(k)*WH +D(k)*WD+WS; end % sestavení výsledné matice H H=[HDD(PQP,PQP) HD(vse,PQP)'; HD(vse,PQP) H(vse,vse)]; W=[H -J'; -J nulaw];% sestavení výsledné matice W
opt [ ] Vyjádření subvektory (báz. a nebáz.) B,N Index bázových a nebázových proměnných β, ν Množina indexů veličin B,N
![opt [ ] Vyjádření subvektory (báz. a nebáz.) B,N Index bázových a nebázových proměnných β, ν Množina indexů veličin B,N](/thumbs/56/38176132.jpg "opt [ ] Vyjádření subvektory (báz. a nebáz.) B,N Index bázových a nebázových proměnných β, ν Množina indexů veličin B,N") 1 2-LP-Lineární programování Lineární funkce i omezovací podmínky opt t X c R c R b b b R...vektor limitů (kapacitních), a i i R b A...matice strukturálních koeficientů, > b! R hod = b, 0,..vektorproměnných,...vektor
1 2-LP-Lineární programování Lineární funkce i omezovací podmínky opt t X c R c R b b b R...vektor limitů (kapacitních), a i i R b A...matice strukturálních koeficientů, > b! R hod = b, 0,..vektorproměnných,...vektor
G( x) %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování
 %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování") Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
Numerické metody a programování. Lekce 8
 Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Numerické metody a programování Lekce 8 Optimalizace hledáme bod x, ve kterém funkce jedné nebo více proměnných f x má minimum (maximum) maximalizace f x je totéž jako minimalizace f x Minimum funkce lokální:
Literatura: Kapitoly 3, 4 a 2 d) ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.") Předmět: MA4 Dnešní látka: Nehomogenní okrajové podmínky. Pokračování OÚ pro PDR (jen pro fajnšmekry). Jednoznačnost zobecněného řešení. Metoda sítí v 1D. Přibližné řešení okrajových úloh. Aproximace vlastních
Předmět: MA4 Dnešní látka: Nehomogenní okrajové podmínky. Pokračování OÚ pro PDR (jen pro fajnšmekry). Jednoznačnost zobecněného řešení. Metoda sítí v 1D. Přibližné řešení okrajových úloh. Aproximace vlastních
Lineární klasifikátory
 Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
Lineární klasifikátory Lineární klasifikátory obsah: perceptronový algoritmus základní verze varianta perceptronového algoritmu přihrádkový algoritmus podpůrné vektorové stroje Lineární klasifikátor navrhnout
Přepočet provozních stavů sítě daných: Výpočet ztrát a kapacitních proudů v síti: Výpočet zkratových poměrů v síti:
 Přepočet provozních stavů sítě daných: změnou topologie sítě (nová přípojnice, transformátor, vedení resp. kabel v síti) změnou zapojení sítě (změna provozu přípojnic resp. směrů napájení sítě) změnou
Přepočet provozních stavů sítě daných: změnou topologie sítě (nová přípojnice, transformátor, vedení resp. kabel v síti) změnou zapojení sítě (změna provozu přípojnic resp. směrů napájení sítě) změnou
Interpolace pomocí splajnu
 Interpolace pomocí splajnu Interpolace pomocí splajnu Připomenutí U interpolace požadujeme, aby graf aproximující funkce procházel všemi uzlovými body. Interpolační polynom aproximující funkce je polynom
Interpolace pomocí splajnu Interpolace pomocí splajnu Připomenutí U interpolace požadujeme, aby graf aproximující funkce procházel všemi uzlovými body. Interpolační polynom aproximující funkce je polynom
Odchylka ekliptiky od roviny Galaxie
 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
PROSTORY SE SKALÁRNÍM SOUČINEM. Definice Nechť L je lineární vektorový prostor nad R. Zobrazení L L R splňující vlastnosti
 PROSTORY SE SKALÁRNÍM SOUČINEM Definice Nechť L je lineární vektorový prostor nad R. Zobrazení L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx, y) = λ(x,
PROSTORY SE SKALÁRNÍM SOUČINEM Definice Nechť L je lineární vektorový prostor nad R. Zobrazení L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx, y) = λ(x,
Faster Gradient Descent Methods
 Faster Gradient Descent Methods Rychlejší gradientní spádové metody Ing. Lukáš Pospíšil, Ing. Martin Menšík Katedra aplikované matematiky, VŠB - Technická univerzita Ostrava 24.1.2012 Ing. Lukáš Pospíšil,
Faster Gradient Descent Methods Rychlejší gradientní spádové metody Ing. Lukáš Pospíšil, Ing. Martin Menšík Katedra aplikované matematiky, VŠB - Technická univerzita Ostrava 24.1.2012 Ing. Lukáš Pospíšil,
Nelineární optimalizace a numerické metody (MI NON)
") Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Nelineární optimalizace a numerické metody (MI NON) Magisterský program: Informatika Obor: Teoretická informatika Katedra: 18101 Katedra teoretické informatiky Jaroslav Kruis Evropský sociální fond Praha
Literatura: Kapitola 2 d) ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.") Předmět: MA4 Dnešní látka: Metoda sítí v 1D. Myšlenka náhrada derivací diferenčními podíly Přibližné řešení okrajových úloh Aproximace vlastních čísel Literatura: Kapitola 2 d) ze skript Karel Rektorys:
Předmět: MA4 Dnešní látka: Metoda sítí v 1D. Myšlenka náhrada derivací diferenčními podíly Přibližné řešení okrajových úloh Aproximace vlastních čísel Literatura: Kapitola 2 d) ze skript Karel Rektorys:
Základní spádové metody
 Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
Základní spádové metody Petr Tichý 23. října 2013 1 Metody typu line search Problém Idea metod min f(x), f : x R Rn R. n Dána počáteční aproximace x 0. Iterační proces (krok k): (a) zvol směr d k, (b)
stránkách přednášejícího.
 Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
2. kapitola: Euklidovské prostory
 2. kapitola: Euklidovské prostory 2.1 Definice. Euklidovským n-rozměrným prostorem rozumíme neprázdnou množinu E n spolu s vektorovým prostorem V n a přiřazením, které každému bodu a z E n a každému vektoru
2. kapitola: Euklidovské prostory 2.1 Definice. Euklidovským n-rozměrným prostorem rozumíme neprázdnou množinu E n spolu s vektorovým prostorem V n a přiřazením, které každému bodu a z E n a každému vektoru
Princip gradientních optimalizačních metod
 Princip gradientních optimalizačních metod Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Úkol a základní
Princip gradientních optimalizačních metod Tomáš Kroupa 20. května 2014 Tento studijní materiál je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky. Obsah Úkol a základní
 k n ( k) n k F n N n C F n F n C F F q n N C F n k 0 C [n, k] [n, k] q C [n, k] k n C C (n k) n C u C u T = T. [n, k] C (n k) n T = k (n k). F n N u = (u 1,..., u n ) v = (v 1,..., v n ) F n d(u, v) u
k n ( k) n k F n N n C F n F n C F F q n N C F n k 0 C [n, k] [n, k] q C [n, k] k n C C (n k) n C u C u T = T. [n, k] C (n k) n T = k (n k). F n N u = (u 1,..., u n ) v = (v 1,..., v n ) F n d(u, v) u
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Pozn. 1. Při návrhu aproximace bychom měli aproximační funkci vybírat tak, aby vektory ϕ (i) byly lineárně
 byly lineárně") 9. Řešení typických úloh diskrétní metodou nejmenších čtverců. DISKRÉTNÍ METODA NEJMENŠÍCH ČTVERCŮ použití: v případech, kdy je nevhodná interpolace využití: prokládání dat křivkami, řešení přeurčených
9. Řešení typických úloh diskrétní metodou nejmenších čtverců. DISKRÉTNÍ METODA NEJMENŠÍCH ČTVERCŮ použití: v případech, kdy je nevhodná interpolace využití: prokládání dat křivkami, řešení přeurčených
Metody vnitřních bodů pro řešení úlohy lineární elasticity s daným třením
 Metody vnitřních bodů pro řešení úlohy lineární elasticity s daným třením J. Machalová, P. Ženčák, R. Kučera Katedra matematické analýzy a aplikací matematiky PřF UP Olomouc Katedra matematiky a deskriptivní
Metody vnitřních bodů pro řešení úlohy lineární elasticity s daným třením J. Machalová, P. Ženčák, R. Kučera Katedra matematické analýzy a aplikací matematiky PřF UP Olomouc Katedra matematiky a deskriptivní
Metody lineární optimalizace Simplexová metoda. Distribuční úlohy
 Metody lineární optimalizace Simplexová metoda Dvoufázová M-úloha Duální úloha jednofázová Post-optimalizační analýza Celočíselné řešení Metoda větví a mezí Distribuční úlohy 1 OÚLP = obecná úloha lineárního
Metody lineární optimalizace Simplexová metoda Dvoufázová M-úloha Duální úloha jednofázová Post-optimalizační analýza Celočíselné řešení Metoda větví a mezí Distribuční úlohy 1 OÚLP = obecná úloha lineárního
Nosné desky. 1. Kirchhoffova teorie ohybu tenkých desek (h/l < 1/10) 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)
 3. Mindlinova teorie pro tlusté desky (h/l < 1/5)") Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
Nosné desky Deska je těleso, které má jeden rozměr mnohem menší než rozměry zbývající. Zatížení desky je orientováno výhradně kolmo k její střednicové rovině. 1. Kirchhoffova teorie ohybu tenkých desek
Kontraktantní/dilatantní
 Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Kontraktantní/dilatantní plasticita - úhel dilatance směr přírůstku plastické deformace Na základě experimentálního měření dospěl St. Venant k závěru, že směry hlavních napětí jsou totožné se směry přírůstku
Program SMP pro kombinované studium
 Zadání příkladů k procvičení na seminář Program SMP pro kombinované studium Nejdůležitější typy příkladů - minimum znalostí před zkouškovou písemkou 1) Matice 1. Pro matice 1 0 2 1 0 3 B = 7 3 4 4 2 0
Zadání příkladů k procvičení na seminář Program SMP pro kombinované studium Nejdůležitější typy příkladů - minimum znalostí před zkouškovou písemkou 1) Matice 1. Pro matice 1 0 2 1 0 3 B = 7 3 4 4 2 0
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda
 Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
Předmět: MA 4 Dnešní látka Opakování: normy vektorů a matic, podmíněnost matic Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Četba: Text o lineární algebře v Příručce přežití na webových
skladbu obou směsí ( v tunách komponenty na 1 tunu směsi):
:") Klíčová slova: simplexová metoda 1 Simplexová metoda Postup výpočtu: 1. Nalezení výchozího řešení. 2. Test optima: pokud je řešení optimální výpočet končí, jinak krok 3. 3. Iterační krok, poté opět test
Klíčová slova: simplexová metoda 1 Simplexová metoda Postup výpočtu: 1. Nalezení výchozího řešení. 2. Test optima: pokud je řešení optimální výpočet končí, jinak krok 3. 3. Iterační krok, poté opět test
Rovinná úloha v MKP. (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w
: rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w") Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
Úvod do optimalizace, metody hladké optimalizace
 Evropský sociální fond Investujeme do vaší budoucnosti Úvod do optimalizace, metody hladké optimalizace Matematika pro informatiky, FIT ČVUT Martin Holeňa, 13. týden LS 2010/2011 O čem to bude? Příklady
Evropský sociální fond Investujeme do vaší budoucnosti Úvod do optimalizace, metody hladké optimalizace Matematika pro informatiky, FIT ČVUT Martin Holeňa, 13. týden LS 2010/2011 O čem to bude? Příklady
EUKLIDOVSKÉ PROSTORY
 EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
Lineární algebra : Skalární součin a ortogonalita
 Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 30. dubna 2014, 09:00 1 2 15.1 Prehilhertovy prostory Definice 1. Buď V LP nad
Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 30. dubna 2014, 09:00 1 2 15.1 Prehilhertovy prostory Definice 1. Buď V LP nad
Termomechanika 9. přednáška Doc. Dr. RNDr. Miroslav Holeček
 Termomechanika 9. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
Termomechanika 9. přednáška Doc. Dr. RNDr. Miroslav Holeček Upozornění: Tato prezentace slouží výhradně pro výukové účely Fakulty strojní Západočeské univerzity v Plzni. Byla sestavena autorem s využitím
Klasifikace a rozpoznávání. Lineární klasifikátory
 Klasifikace a rozpoznávání Lineární klasifikátory Opakování - Skalární součin x = x1 x 2 w = w T x = w 1 w 2 x 1 x 2 w1 w 2 = w 1 x 1 + w 2 x 2 x. w w T x w Lineární klasifikátor y(x) = w T x + w 0 Vyber
Klasifikace a rozpoznávání Lineární klasifikátory Opakování - Skalární součin x = x1 x 2 w = w T x = w 1 w 2 x 1 x 2 w1 w 2 = w 1 x 1 + w 2 x 2 x. w w T x w Lineární klasifikátor y(x) = w T x + w 0 Vyber
Značení 1.1 (posloupnost výsledků pokusu). Mějme posloupnost opakovaných (i závislých) pokusů,
. Mějme posloupnost opakovaných (i závislých) pokusů,") Rekurentní jevy Značení. (posloupnost výsledků pokusu). Mějme posloupnost opakovaných (i závislých) pokusů, kde každý má tutéž konečnou nebo spočetnou množinu výsledků E, E,...}. Pak E j,..., E jn } značí
Rekurentní jevy Značení. (posloupnost výsledků pokusu). Mějme posloupnost opakovaných (i závislých) pokusů, kde každý má tutéž konečnou nebo spočetnou množinu výsledků E, E,...}. Pak E j,..., E jn } značí
Interpolace, ortogonální polynomy, Gaussova kvadratura
 Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Plánování projektu. 3. dubna Úvod. 2 Reprezentace projektu. 3 Neomezené zdroje. 4 Variabilní doba trvání. 5 Přidání pracovní síly
 Plánování proektu 3. dubna 2018 1 Úvod 2 Reprezentace proektu 3 Neomezené zdroe 4 Variabilní doba trvání 5 Přidání pracovní síly Problémy plánování proektu Zprostředkování, instalace a testování rozsáhlého
Plánování proektu 3. dubna 2018 1 Úvod 2 Reprezentace proektu 3 Neomezené zdroe 4 Variabilní doba trvání 5 Přidání pracovní síly Problémy plánování proektu Zprostředkování, instalace a testování rozsáhlého
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
procesy II Zuzana 1 Katedra pravděpodobnosti a matematické statistiky Univerzita Karlova v Praze
 limití Náhodé limití Katedra pravděpodobosti a matematické statistiky Uiverzita Karlova v Praze email: praskova@karli.mff.cui.cz 9.4.-22.4. 200 limití Outlie limití limití efiice: Řekeme, že stacioárí
limití Náhodé limití Katedra pravděpodobosti a matematické statistiky Uiverzita Karlova v Praze email: praskova@karli.mff.cui.cz 9.4.-22.4. 200 limití Outlie limití limití efiice: Řekeme, že stacioárí
ROVINNÁ ÚLOHA. Všechny veličiny (geometrie, materiálové vlastnosti, zatížení) jsou nezávislé na jedné prostorové proměnné
 jsou nezávislé na jedné prostorové proměnné") ROVINNÁ ÚLOHA Rovinná úloha Všechny veličiny (geometrie, materiálové vlastnosti, zatížení) jsou nezávislé na jedné prostorové proměnné Rovinná napjatost Rovinná deformace Rotačně symetrická úloha Rovinná
ROVINNÁ ÚLOHA Rovinná úloha Všechny veličiny (geometrie, materiálové vlastnosti, zatížení) jsou nezávislé na jedné prostorové proměnné Rovinná napjatost Rovinná deformace Rotačně symetrická úloha Rovinná
z Matematické statistiky 1 1 Konvergence posloupnosti náhodných veličin
 Příklady k procvičení z Matematické statistiky Poslední úprava. listopadu 207. Konvergence posloupnosti náhodných veličin. Necht X, X 2... jsou nezávislé veličiny s rovnoměrným rozdělením na [0, ]. Definujme
Příklady k procvičení z Matematické statistiky Poslední úprava. listopadu 207. Konvergence posloupnosti náhodných veličin. Necht X, X 2... jsou nezávislé veličiny s rovnoměrným rozdělením na [0, ]. Definujme
ANALÝZA A KLASIFIKACE DAT
 ANALÝZA A KLASIFIKACE DAT prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. LINEÁRNÍ KLASIFIKACE PRINCIPY KLASIFIKACE pomocí diskriminačních funkcí funkcí,
ANALÝZA A KLASIFIKACE DAT prof. Ing. Jiří Holčík, CSc. INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. LINEÁRNÍ KLASIFIKACE PRINCIPY KLASIFIKACE pomocí diskriminačních funkcí funkcí,
Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice. sin x + x 2 2 = 0.
 A 9 vzorové řešení Př. 1. Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice Počítejte v radiánech, ne ve stupních! sin x + x 2 2 = 0. Rovnici lze upravit na sin
A 9 vzorové řešení Př. 1. Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice Počítejte v radiánech, ne ve stupních! sin x + x 2 2 = 0. Rovnici lze upravit na sin
Numerické metody optimalizace - úvod
 Numerické metody optimalizace - úvod Petr Tichý 16. února 2015 1 Organizace přednášek a cvičení 13 přednášek a cvičení. Zápočet: úloha programování a testování úloh v Matlabu. Další informace na blogu
Numerické metody optimalizace - úvod Petr Tichý 16. února 2015 1 Organizace přednášek a cvičení 13 přednášek a cvičení. Zápočet: úloha programování a testování úloh v Matlabu. Další informace na blogu
Prostorové konstrukce. neznámé parametry: u, v w. (prvky se středostranovými uzly)
") Konečné prvk pro řešení 3D úloh Prostorové konstrukce neznámé parametr: u, v w volba různého počtu uzlů a neznámých v uzlech možnost zakřivených hran prvků (prvk se středostranovými uzl) Opakování: Geometrické
Konečné prvk pro řešení 3D úloh Prostorové konstrukce neznámé parametr: u, v w volba různého počtu uzlů a neznámých v uzlech možnost zakřivených hran prvků (prvk se středostranovými uzl) Opakování: Geometrické
Náhodné vektory a matice
 Náhodné vektory a matice Jiří Militký Katedra textilních materiálů Technická Universita Liberec, Červeně označené slide jsou jen pro doplnění informací a nezkouší se. Symbolika A B Jev jistý S (nastane
Náhodné vektory a matice Jiří Militký Katedra textilních materiálů Technická Universita Liberec, Červeně označené slide jsou jen pro doplnění informací a nezkouší se. Symbolika A B Jev jistý S (nastane
Semestrální písemka BMA3 - termín varianta A13 vzorové řešení
 Semestrální písemka BMA3 - termín 6.1.9 - varianta A13 vzorové řešení Každý příklad je hodnocen maximálně 18 body, z toho část a) 1 body a část b) body. Mezivýsledky při výpočtech zaokrouhlujte alespoň
Semestrální písemka BMA3 - termín 6.1.9 - varianta A13 vzorové řešení Každý příklad je hodnocen maximálně 18 body, z toho část a) 1 body a část b) body. Mezivýsledky při výpočtech zaokrouhlujte alespoň
4EK311 Operační výzkum. 2. Lineární programování
 4EK311 Operační výzkum 2. Lineární programování 2.2 Matematický model úlohy LP Nalézt extrém účelové funkce z = c 1 x 1 + c 2 x 2 + + c n x n na soustavě vlastních omezení a 11 x 1 + a 12 x 2 + a 13 x
4EK311 Operační výzkum 2. Lineární programování 2.2 Matematický model úlohy LP Nalézt extrém účelové funkce z = c 1 x 1 + c 2 x 2 + + c n x n na soustavě vlastních omezení a 11 x 1 + a 12 x 2 + a 13 x
Fakt. Každou soustavu n lineárních ODR řádů n i lze eliminací převést ekvivalentně na jednu lineární ODR
 DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
Univerzita Karlova v Praze procesy II. Zuzana. Predikce
 ne ve Náhodné 1 1 Katedra pravděpodobnosti a matematické statistiky Univerzita Karlova v Praze email: praskova@karlin.mff.cuni.cz 23.4.-7.5. 2010 ne ve 1 ne Outline 2 ve ne ve Definice: Nechť H je Hilbertův
ne ve Náhodné 1 1 Katedra pravděpodobnosti a matematické statistiky Univerzita Karlova v Praze email: praskova@karlin.mff.cuni.cz 23.4.-7.5. 2010 ne ve 1 ne Outline 2 ve ne ve Definice: Nechť H je Hilbertův
Elektroenergetika 1. Základní pojmy a definice
 Základní pojmy a definice Elektroenergetika vědní disciplína, jejímž předmětem zkoumání je zabezpečení elektrické energie pro lidstvo Výroba elektrické energie Přenos a distribuce elektrické energie Spotřeba
Základní pojmy a definice Elektroenergetika vědní disciplína, jejímž předmětem zkoumání je zabezpečení elektrické energie pro lidstvo Výroba elektrické energie Přenos a distribuce elektrické energie Spotřeba
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STROJNÍHO INŽENÝRSTVÍ ÚSTAV MECHANIKY TĚLES, MECHATRONIKY A BIOMECHANIKY Komentovaný metodický list č. 1/4 Vytvořil: Ing. Oldřich Ševeček & Ing. Tomáš Profant, Ph.D.
2. ANALYTICKÁ GEOMETRIE V PROSTORU Vektory Úlohy k samostatnému řešení... 21
 2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
2 ANALYTICKÁ GEOMETRIE V PROSTORU 21 21 Vektory 21 Úlohy k samostatnému řešení 21 22 Přímka a rovina v prostoru 22 Úlohy k samostatnému řešení 22 23 Vzájemná poloha přímek a rovin 25 Úlohy k samostatnému
odpovídá jedna a jen jedna hodnota jiných
 8. Regresní a korelační analýza Problém: hledání, zkoumání a hodnocení souvislostí, závislostí mezi dvěma a více statistickými znaky (veličinami). Typy závislostí: pevné a volné Pevná závislost každé hodnotě
8. Regresní a korelační analýza Problém: hledání, zkoumání a hodnocení souvislostí, závislostí mezi dvěma a více statistickými znaky (veličinami). Typy závislostí: pevné a volné Pevná závislost každé hodnotě
Numerické metody a programování. Lekce 4
 Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
Numerické metody a programování Lekce 4 Linarní algebra soustava lineárních algebraických rovnic a 11 a 12 x 2 a 1, N x N = b 1 a 21 a 22 x 2 a 2, N x N = b 2 a M,1 a M,2 x 2 a M,N x N = b M zkráceně A
Definice spojité náhodné veličiny zjednodušená verze
 Definice spojité náhodné veličiny zjednodušená verze Náhodná veličina X se nazývá spojitá, jestliže existuje nezáporná funkce f : R R taková, že pro každé a, b R { }, a < b, platí P(a < X < b) = b a f
Definice spojité náhodné veličiny zjednodušená verze Náhodná veličina X se nazývá spojitá, jestliže existuje nezáporná funkce f : R R taková, že pro každé a, b R { }, a < b, platí P(a < X < b) = b a f
3. Přednáška: Line search
 Úloha: 3. Přednáška: Line search min f(x), x R n kde x R n, n 1 a f : R n R je dvakrát spojitě diferencovatelná. Iterační algoritmy: Začínám v x 0 a vytvářím posloupnost iterací {x k } k=0, tak, aby minimum
Úloha: 3. Přednáška: Line search min f(x), x R n kde x R n, n 1 a f : R n R je dvakrát spojitě diferencovatelná. Iterační algoritmy: Začínám v x 0 a vytvářím posloupnost iterací {x k } k=0, tak, aby minimum
10 Funkce více proměnných
 M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
Katedra matematiky Fakulty jaderné a fyzikálně inženýrské ČVUT v Praze Příjmení a jméno ➊ ➋ ➌ ➍ ➎ ➏ Bonus
 Zkoušková písemná práce č 1 z předmětu 1RMF čtvrtek 16 ledna 214, 9: 11: ➊ 11 bodů) Ve třídě zobecněných funkcí vypočítejte itu x ) n n2 sin 2 P 1 n x) ➋ 6 bodů) Aplikací Laplaceovy transformace vypočtěte
Zkoušková písemná práce č 1 z předmětu 1RMF čtvrtek 16 ledna 214, 9: 11: ➊ 11 bodů) Ve třídě zobecněných funkcí vypočítejte itu x ) n n2 sin 2 P 1 n x) ➋ 6 bodů) Aplikací Laplaceovy transformace vypočtěte
Lineární algebra : Skalární součin a ortogonalita
 Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
ITÍ PROGRAMU ANSYS PRO PREDIKCI VLASTNÍCH FREKVENCF REKVENCÍ A TVARŮ KMITU VODNÍCH. Vlastislav Salajka. Petr Hradil
 Luhačovice 5. - 7. listopadu 008 VYUŽI IÍ PROGRAMU ANSYS PRO PREDIKCI VLASNÍCH FREKVENCF REKVENCÍ A VARŮ KMIU VODNÍCH ÚSAV SAVEBNÍ MECHANIKY FAKULA SAVEBNÍ VYSOKÉ UČENÍ ECHNICKÉ V BRNĚ Vlastislav Salajka
Luhačovice 5. - 7. listopadu 008 VYUŽI IÍ PROGRAMU ANSYS PRO PREDIKCI VLASNÍCH FREKVENCF REKVENCÍ A VARŮ KMIU VODNÍCH ÚSAV SAVEBNÍ MECHANIKY FAKULA SAVEBNÍ VYSOKÉ UČENÍ ECHNICKÉ V BRNĚ Vlastislav Salajka
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc.
 Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Michael Valášek Vedoucí práce: doc. Ing. Václav Bauma, CSc. Zadání bakalářské práce Mechanismus vztlakové klapky křídla 1. Proveďte rešerši možných konstrukčních řešení vztlakové klapky křídla 2. Seznamte
Numerické řešení nelineárních rovnic
 Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Aproximace funkcí. x je systém m 1 jednoduchých, LN a dostatečně hladkých funkcí. x c m. g 1. g m. a 1. x a 2. x 2 a k. x k b 1. x b 2.
 Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Arnoldiho a Lanczosova metoda
 Arnoldiho a Lanczosova metoda 1 Částečný problém vlastních čísel Ne vždy je potřeba (a někdy to není ani technicky možné) nalézt celé spektrum dané matice (velké řídké matice). Úloze, ve které chceme aproximovat
Arnoldiho a Lanczosova metoda 1 Částečný problém vlastních čísel Ne vždy je potřeba (a někdy to není ani technicky možné) nalézt celé spektrum dané matice (velké řídké matice). Úloze, ve které chceme aproximovat
AVDAT Mnohorozměrné metody, metody klasifikace
 AVDAT Mnohorozměrné metody, metody klasifikace Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Mnohorozměrné metody Regrese jedna náhodná veličina je vysvětlována pomocí jiných
AVDAT Mnohorozměrné metody, metody klasifikace Josef Tvrdík Katedra informatiky Přírodovědecká fakulta Ostravská univerzita Mnohorozměrné metody Regrese jedna náhodná veličina je vysvětlována pomocí jiných
Kapitola 5. SLAR - gradientní metody
 23.3.2o7 Kapitola 5. SLAR - gradientní metody Metody na řešení SLAR přímé (GEM, metoda LU-rozkladu) iterační (Jacobiova m., Gauss-Seidelova m., metoda SOR) gradientní X X Motivace Uvažujme kvadratickou
23.3.2o7 Kapitola 5. SLAR - gradientní metody Metody na řešení SLAR přímé (GEM, metoda LU-rozkladu) iterační (Jacobiova m., Gauss-Seidelova m., metoda SOR) gradientní X X Motivace Uvažujme kvadratickou
2. Určte hromadné body, limitu superior a limitu inferior posloupností: 2, b n = n. n n n.
 Písemka matematika 3 s řešením 1. Vypočtěte lim n( 1 + n 2 n), n lim n (( 1 + 1 n e ) n ) n. 1/2, 1/ e 2. Určte hromadné body, limitu superior a limitu inferior posloupností: a n = sin nπ ( 2, b n = n
Písemka matematika 3 s řešením 1. Vypočtěte lim n( 1 + n 2 n), n lim n (( 1 + 1 n e ) n ) n. 1/2, 1/ e 2. Určte hromadné body, limitu superior a limitu inferior posloupností: a n = sin nπ ( 2, b n = n
SVD rozklad a pseudoinverse
 SVD rozklad a pseudoinverse Odpřednesenou látku naleznete v kapitole 12 skript Abstraktní a konkrétní lineární algebra. Jiří Velebil: Lineární algebra 19.12.2016: SVD rozklad a pseudoinverse 1/21 Cíle
SVD rozklad a pseudoinverse Odpřednesenou látku naleznete v kapitole 12 skript Abstraktní a konkrétní lineární algebra. Jiří Velebil: Lineární algebra 19.12.2016: SVD rozklad a pseudoinverse 1/21 Cíle
Petr Lachout October 16, 2011: Petr Lachout. EKN012 Optimalizace I
 Petr Lachout October 16, 2011:1200 1 Matematické programování Petr Lachout - pracovní text k přednášce EKN012 Optimalizace I 16.října 2011 2 MP October 16, 2011:1200 Obsah 0 Úvod 7 1 Teorie lineárního
Petr Lachout October 16, 2011:1200 1 Matematické programování Petr Lachout - pracovní text k přednášce EKN012 Optimalizace I 16.října 2011 2 MP October 16, 2011:1200 Obsah 0 Úvod 7 1 Teorie lineárního
3. Sekvenční logické obvody
 3. Sekvenční logické obvody 3. Sekvenční logické obvody - úvod Sledujme chování jednoduchého logického obvodu se zpětnou vazbou 3. Sekvenční logické obvody příklad sekv.o. Příklad sledování polohy vozíku
3. Sekvenční logické obvody 3. Sekvenční logické obvody - úvod Sledujme chování jednoduchého logického obvodu se zpětnou vazbou 3. Sekvenční logické obvody příklad sekv.o. Příklad sledování polohy vozíku
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 Tomáš Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 1 / 63 1 2 3 4 5 6 7 8 9 10 11 2 / 63 Aritmetický vektor Definition 1 Aritmetický vektor x je uspořádaná
Tomáš Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 1 / 63 1 2 3 4 5 6 7 8 9 10 11 2 / 63 Aritmetický vektor Definition 1 Aritmetický vektor x je uspořádaná
IV113 Validace a verifikace. Převod LTL formule na Büchi automat. Jiří Barnat
 IV113 Validace a verifikace Převod LTL formule na Büchi automat Jiří Barnat Připomenutí IV113 úvod do validace a verifikace: LTL BA str. 2/26 Problém Kripkeho struktura M LTL formule ϕ M = ϕ? Řešení pomocí
IV113 Validace a verifikace Převod LTL formule na Büchi automat Jiří Barnat Připomenutí IV113 úvod do validace a verifikace: LTL BA str. 2/26 Problém Kripkeho struktura M LTL formule ϕ M = ϕ? Řešení pomocí
1. Řešená konstrukce Statické řešení Výpočet průhybové čáry Dynamika Vlastní netlumené kmitání...
 . Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
. Řešená konstrukce.... Statické řešení.... Výpočet průhybové čáry... 5. Dynamika.... Vlastní netlumené kmitání..... Jacobiho metoda rovinné rotace... 4.. Popis algoritmu... 4. Vynucené kmitání... 5 4.
Obsah: 1. Technická zpráva ke statickému výpočtu 2. Seznam použité literatury 3. Návrh a posouzení monolitického věnce nad okenním otvorem
 Stavba: Stavební úpravy skladovací haly v areálu firmy Strana: 1 Obsah: PROSTAB 1. Technická zpráva ke statickému výpočtu 2 2. Seznam použité literatury 2 3. Návrh a posouzení monolitického věnce nad okenním
Stavba: Stavební úpravy skladovací haly v areálu firmy Strana: 1 Obsah: PROSTAB 1. Technická zpráva ke statickému výpočtu 2 2. Seznam použité literatury 2 3. Návrh a posouzení monolitického věnce nad okenním
Operátory pro maticové operace (operace s celými maticemi) * násobení maticové Pro čísla platí: 2*2
 * násobení maticové Pro čísla platí: 2*2") * násobení maticové Pro čísla platí: Pro matice - násobení inverzní maticí inv inverzní matice A -1 k dané matici A je taková matice, která po vynásobení s původní maticí dá jednotkovou matici. Inverzní
* násobení maticové Pro čísla platí: Pro matice - násobení inverzní maticí inv inverzní matice A -1 k dané matici A je taková matice, která po vynásobení s původní maticí dá jednotkovou matici. Inverzní
5. cvičení z Matematiky 2
 5. cvičení z Matematiky 2 21.-25. března 2016 5.1 Nalezněte úhel, který v bodě 1, 0, 0 svírají grafy funkcí fx, y ln x 2 + y 2 a gx, y sinxy. Úhel, který svírají grafy funkcí je dán jako úhel mezi jednotlivými
5. cvičení z Matematiky 2 21.-25. března 2016 5.1 Nalezněte úhel, který v bodě 1, 0, 0 svírají grafy funkcí fx, y ln x 2 + y 2 a gx, y sinxy. Úhel, který svírají grafy funkcí je dán jako úhel mezi jednotlivými
Základy ekonometrie. XI. Vektorové autoregresní modely. Základy ekonometrie (ZAEK) XI. VAR modely Podzim / 28
 XI. VAR modely Podzim / 28") Základy ekonometrie XI. Vektorové autoregresní modely Základy ekonometrie (ZAEK) XI. VAR modely Podzim 2015 1 / 28 Obsah tématu 1 Prognózování s VAR modely 2 Vektorové modely korekce chyb (VECM) 3 Impulzní
Základy ekonometrie XI. Vektorové autoregresní modely Základy ekonometrie (ZAEK) XI. VAR modely Podzim 2015 1 / 28 Obsah tématu 1 Prognózování s VAR modely 2 Vektorové modely korekce chyb (VECM) 3 Impulzní
Četba: Texty o lineární algebře (odkazy na webových stránkách přednášejícího).
.") Předmět: MA 4 Dnešní látka Lineární (vektorový) prostor Normovaný lineární prostor Normy matic a vektorů Symetrické matice, pozitivně definitní matice Gaussova eliminační metoda, podmíněnost matic Četba:
Předmět: MA 4 Dnešní látka Lineární (vektorový) prostor Normovaný lineární prostor Normy matic a vektorů Symetrické matice, pozitivně definitní matice Gaussova eliminační metoda, podmíněnost matic Četba:
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Základy maticového počtu Matice, determinant, definitnost
 Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 2000/2001 Michal Marvan. 14.
 Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 2000/2001 Michal Marvan 14. Vlastní vektory Bud V vektorový prostor nad polem P. Lineární zobrazení f : V
Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA II, letní semestr 2000/2001 Michal Marvan 14. Vlastní vektory Bud V vektorový prostor nad polem P. Lineární zobrazení f : V
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Definice 1.1. Nechť je M množina. Funkci ρ : M M R nazveme metrikou, jestliže má následující vlastnosti:
 Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
1 Kardinální čísla. množin. Tvrzení: Necht X Cn. Pak: 1. X Cn a je to nejmenší prvek třídy X v uspořádání (Cn, ),
,") Pracovní text k přednášce Logika a teorie množin 4.1.2007 1 1 Kardinální čísla 2 Ukázali jsme, že ordinální čísla reprezentují typy dobrých uspořádání Základy teorie množin Z minula: 1. Věta o ordinálních
Pracovní text k přednášce Logika a teorie množin 4.1.2007 1 1 Kardinální čísla 2 Ukázali jsme, že ordinální čísla reprezentují typy dobrých uspořádání Základy teorie množin Z minula: 1. Věta o ordinálních
SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC
 SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC Pojmy: Algebraická rovnice... rovnice obsahující pouze celé nezáporné mocniny neznámé x, tj. a n x n + a n 1 x n 1 +... + a x + a 1 x + a 0 = 0, kde n je přirozené
SOUSTAVY LINEÁRNÍCH ALGEBRAICKÝCH ROVNIC Pojmy: Algebraická rovnice... rovnice obsahující pouze celé nezáporné mocniny neznámé x, tj. a n x n + a n 1 x n 1 +... + a x + a 1 x + a 0 = 0, kde n je přirozené
TEORIE MÍRY V některých předchozích kapitolách jste se setkali s měřením velikostí množin a víte, jaké byly těžkosti s měřením množin i na reálné ose.
 TEORIE MÍRY V některých předchozích kapitolách jste se setkali s měřením velikostí množin a víte, jaké byly těžkosti s měřením množin i na reálné ose. Kvůli těmto těžkostem se měření zúžilo jen na délku
TEORIE MÍRY V některých předchozích kapitolách jste se setkali s měřením velikostí množin a víte, jaké byly těžkosti s měřením množin i na reálné ose. Kvůli těmto těžkostem se měření zúžilo jen na délku
4EK213 Lineární modely. 12. Dopravní problém výchozí řešení
 4EK213 Lineární modely 12. Dopravní problém výchozí řešení 12. Distribuční úlohy LP Úlohy výrobního plánování (alokace zdrojů) Úlohy finančního plánování (optimalizace portfolia) Úlohy reklamního plánování
4EK213 Lineární modely 12. Dopravní problém výchozí řešení 12. Distribuční úlohy LP Úlohy výrobního plánování (alokace zdrojů) Úlohy finančního plánování (optimalizace portfolia) Úlohy reklamního plánování
Systematická tvorba jízdního řádu 2. cvičení
 Projektování dopravní obslužnosti Systematická tvorba jízdního řádu 2. cvičení Ing. Zdeněk Michl Ústav logistiky a managementu dopravy ČVUT v Praze Fakulta dopravní Rekapitulace zadání Je dána následující
Projektování dopravní obslužnosti Systematická tvorba jízdního řádu 2. cvičení Ing. Zdeněk Michl Ústav logistiky a managementu dopravy ČVUT v Praze Fakulta dopravní Rekapitulace zadání Je dána následující
Drsná matematika III 2. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení
 Drsná matematika III. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení Masarykova univerzita Fakulta informatiky 3. 9. 6 Obsah přednášky Literatura Derivace
Drsná matematika III. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení Masarykova univerzita Fakulta informatiky 3. 9. 6 Obsah přednášky Literatura Derivace
Drsná matematika III 2. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení
 Drsná matematika III. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení Masarykova univerzita Fakulta informatiky 6. 9. Obsah přednášky Literatura Derivace vyšších
Drsná matematika III. přednáška Funkce více proměnných: Aproximace vyšších rádů, Taylorova věta, inverzní zobrazení Masarykova univerzita Fakulta informatiky 6. 9. Obsah přednášky Literatura Derivace vyšších
ZÁklady teorie pravděpodobnosti
 ZÁklady teorie pravděpodobnosti Pro předmět MatematickÁ statistika 1 Michal Kulich Katedra pravděpodobnosti a matematické statistiky Matematicko-fysikální fakulta University Karlovy Tyto poznámky poskytují
ZÁklady teorie pravděpodobnosti Pro předmět MatematickÁ statistika 1 Michal Kulich Katedra pravděpodobnosti a matematické statistiky Matematicko-fysikální fakulta University Karlovy Tyto poznámky poskytují
DEFINICE,VĚTYADŮKAZYKÚSTNÍZKOUŠCEZMAT.ANALÝZY Ib
 INFORMACE O PRŮBĚHU A POŽADAVKY KE ZKOUŠCE Z MAT. ANALÝZYIbVLS2010/11 Ke zkoušce mohou přistoupit studenti, kteří získali zápočet. Do indexu jej zapíši na zkoušce, pokud cvičící potvrdí, že na něj student
INFORMACE O PRŮBĚHU A POŽADAVKY KE ZKOUŠCE Z MAT. ANALÝZYIbVLS2010/11 Ke zkoušce mohou přistoupit studenti, kteří získali zápočet. Do indexu jej zapíši na zkoušce, pokud cvičící potvrdí, že na něj student
Optimální trvanlivost nástroje
 Ústav Strojírenské technologie Speciální technologie výroby Cvičení Optimální trvanlivost nástroje č. zadání: Zadání: Z naměřených hodnot opotřebení vyměnitelné břitové destičky určete optimální trvanlivost
Ústav Strojírenské technologie Speciální technologie výroby Cvičení Optimální trvanlivost nástroje č. zadání: Zadání: Z naměřených hodnot opotřebení vyměnitelné břitové destičky určete optimální trvanlivost
DRN: Kořeny funkce numericky
 DRN: Kořeny funkce numericky Kořenem funkce f rozumíme libovolné číslo r splňující f(r) = 0. Fakt. Nechť f je funkce na intervalu a, b. Jestliže f(a) f(b) < 0 (tj. f(a) a f(b) mají opačná znaménka) a f
DRN: Kořeny funkce numericky Kořenem funkce f rozumíme libovolné číslo r splňující f(r) = 0. Fakt. Nechť f je funkce na intervalu a, b. Jestliže f(a) f(b) < 0 (tj. f(a) a f(b) mají opačná znaménka) a f
Hledání extrémů funkcí
 Hledání extrémů funkcí Budeme se zabývat téměř výhradně hledáním minima. Přes nost nalezeného extrému Obecně není hledání extrému tak přesné jako řešení rovnic. Demonstrovat to můžeme na příkladu hledání
Hledání extrémů funkcí Budeme se zabývat téměř výhradně hledáním minima. Přes nost nalezeného extrému Obecně není hledání extrému tak přesné jako řešení rovnic. Demonstrovat to můžeme na příkladu hledání
Numerické řešení nelineárních rovnic
 Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
LWS při heteroskedasticitě
 Stochastické modelování v ekonomii a financích Petr Jonáš 7. prosince 2009 Obsah 1 2 3 4 5 47 1 Předpoklad 1: Y i = X i β 0 + e i i = 1,..., n. (X i, e i) je posloupnost nezávislých nestejně rozdělených
Stochastické modelování v ekonomii a financích Petr Jonáš 7. prosince 2009 Obsah 1 2 3 4 5 47 1 Předpoklad 1: Y i = X i β 0 + e i i = 1,..., n. (X i, e i) je posloupnost nezávislých nestejně rozdělených
Úvod do lineární algebry
 Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Numerické metody lineární algebry
 Numerické metody lineární algebry 1 Úvod 11 Úlohy lineární algebry 1 Řešení soustav lineárních rovnic A x = b Řešení soustavy s regulární čtvercovou maticí A řádu n n pro 1 nebo více pravých stran Výpočet
Numerické metody lineární algebry 1 Úvod 11 Úlohy lineární algebry 1 Řešení soustav lineárních rovnic A x = b Řešení soustavy s regulární čtvercovou maticí A řádu n n pro 1 nebo více pravých stran Výpočet
Zadání zkoušky z konvexní optimalizace dne
 Zadání zkoušky z konvexní optimalizace dne 10.2.2017 Termín odevzdání: do 9,00 hodin dne 11.2.2017, buď mailem nebomnědorukounakatedřealgebryvsobotumezi8,45-9,00 Celkově je ze zkoušky možné získat 52 bodů.
Zadání zkoušky z konvexní optimalizace dne 10.2.2017 Termín odevzdání: do 9,00 hodin dne 11.2.2017, buď mailem nebomnědorukounakatedřealgebryvsobotumezi8,45-9,00 Celkově je ze zkoušky možné získat 52 bodů.