Vlastnosti konvoluce. ÚPGM FIT VUT Brno,
|
|
|
- Marek Holub
- před 9 lety
- Počet zobrazení:
Transkript
1 Systémy Vlastnosti lineárních systémů. Konvoluce diskrétní a spojitý čas. Vlastnosti konvoluce Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1

2 Systémy obecně: spojení komponentů, zařízení nebo subsystémů pro zpracování informací nebo povelů (např. řízení auta, rafinérie, populace mravenců v lese,...). systémy pro nás: zařízení obrábějící, zpracovávající či upravující signály. Systém se spojitým časem zpracovává signály se spojitým časem, signál y(t) je reakcí na x(t), značíme: x(t) y(t). Systém s diskrétním časem zpracovává signály s diskrétním časem, signál y[n] je reakcí na x[n], značíme: x[n] y[n]. 2
 je reakcí na x(t), značíme: x(t) y(t).")
3 Příklad 1 spojitý: elektrický obvod Chceme znát závislost u c (t) na u s (t): Proud obvodem: i(t) = u s(t) u c (t) R proud kondenzátorem: i(t) = C du c(t) dt. Dáme to dohromady: du c(t) dt + 1 RC u c(t) = 1 RC u s(t)....což je diferenciální rovnice, kterou můžeme vyřešit pro dané u s (t). Příklad 2 diskrétní: počet neuronů v mém mozku se každý měsíc snižuje o 0.1% plus o to, kolik jsem za daný měsíc vypil alkoholu: y[n] = 0.999y[n 1] x[n] Jedná se o tzv. diferenční rovnici, kterou můžeme vyřešit pro daný průběh x[n] a počáteční podmínku y[0] (počet neuronů při narození) a zjistit např, kdy nastane y[n] = 0 (tento měsíc končí přednášky ISS :-). 3
![Příklad 2 diskrétní: počet neuronů v mém mozku se každý měsíc snižuje o 0.1% plus o to, kolik jsem za daný měsíc vypil alkoholu: y[n] = 0.](/docs-images/42/4485643/images/page_3.jpg "999y[n 1] x[n] Jedná se o tzv.")
4 Spojení systémů paralelní, sériové (kaskádní), zpětnovazební: ZÁKLADNÍ VLASTNOSTI SYSTÉMŮ S pamětí / bez paměti systémy s pamětí jsou schopny udržet (pamatovat si) nějakou předešlou hodnotu/hodnoty. Systémy bez paměti reagují pouze na okamžitou hodnotu vstupu. Příklady: s pamětí: neurony v mozku (systém si pamatuje předchozí počet neuronů). Příklady: bez paměti: y(t) = Kx(t). 4
.")
5 Další vlastnosti budeme ukazovat na systému pití piva: vstupem je počet vypitých piv, výstupem je velikost úsměvu: 5

6 Kauzalita systém reaguje pouze na současný či minulý vstup. Nesmí vidět do budoucnosti. Pivní příklad: Seriózní příklad kauzální: y[n] = x[n] x[n 1]. Seriózní příklad nekauzální: y(t) = x( t). 6
![Pivní příklad: Seriózní příklad kauzální: y[n] =](/docs-images/42/4485643/images/page_6.jpg "x[n] x[n 1].")
7 Stabilita omezený vstup produkuje omezený výstup: můžeme najít taková dvě kladná reálná čísla B, C <, že x(t) < B y(t) < C x[n] < B y[n] < C. Příklad 1: y(t) = tx(t). I pro omezený vstup je pro čas t = hodnota y(t) = nestabilní. Příklad 2: y(t) = e x(t). Pro omezené x(t) v intervalu [ B, B], je y(t) omezené v [e B, e +B ]. Vybereme-li z nich to větší, máme omezení pro výstup C systém je stabilní. 7
 v intervalu [ B, B], je y(t) omezené v [e B, e +B ].")
8 Časová invariantnost Systém nemění své chování v čase - pokud na signál x(t) zareagoval signálem y(t), na signál x(t t 0 ) zareaguje signálem y(t t 0 ). Podobně pokud x[n] y[n], tak x[n n 0 ] y[n n 0 ]. Pivní příklad: Seriózní příklad 1: y(t) = sin[x(t)]. Hledáme-li y(t t 0 ), dosadíme modifikovaný čas jako argument funkce: y(t t 0 ) = sin[x(t t 0 )] a tvrzení platí čas. invariantní. 8
![Podobně pokud x[n] y[n], tak x[n n 0 ] y[n n 0 ].](/docs-images/42/4485643/images/page_8.jpg "Pivní příklad: Seriózní příklad 1: y(t) = sin[x(t)].")
9 Seriózní příklad 2: y[n] = nx[n]. Najdeme protipříklad, který nevyhovuje pokud x[n] y[n], tak x[n n 0 ] y[n n 0 ]? Pokud x[n] = δ[n] (diskrétní jednotkový impuls), pak y[n] = 0 n. Když vstup posuneme: x[n 1] = δ[n 1], výstupem bude také δ[n 1]. Našli jsme tedy taková x[n] y[n], pro které x[n n 0 ] nemá jako výstup y[n n 0 ] systém není invariantní (je proměnný). Linearita 2 podmínky: předpokládáme, že x 1 (t) y 1 (t) a x 2 (t) y 2 (t). aditivita: x 1 (t) + x 2 (t) y 1 (t) + y 2 (t). scaling nebo homogenita: ax 1 (t) ay 1 (t). (obdobně pro diskrétní čas). Můžeme dohromady zapsat jako jedinou podmínku: ax 1 (t) + bx 2 (t) ay 1 (t) + by 2 (t) ax 1 [n] + bx 2 [n] ay 1 [n] + by 2 [n] 9
![Našli jsme tedy taková x[n] y[n], pro které x[n n 0 ] nemá jako výstup y[n n 0 ] systém není invariantní (je proměnný).](/docs-images/42/4485643/images/page_9.jpg "Linearita 2 podmínky: předpokládáme, že x 1 (t) y 1 (t) a x 2 (t) y 2 (t). aditivita: x 1 (t) + x 2 (t) y 1 (t) + y 2 (t). scaling nebo homogenita: ax 1 (t) ay 1 (t).")
10 Pivní příklad: 10
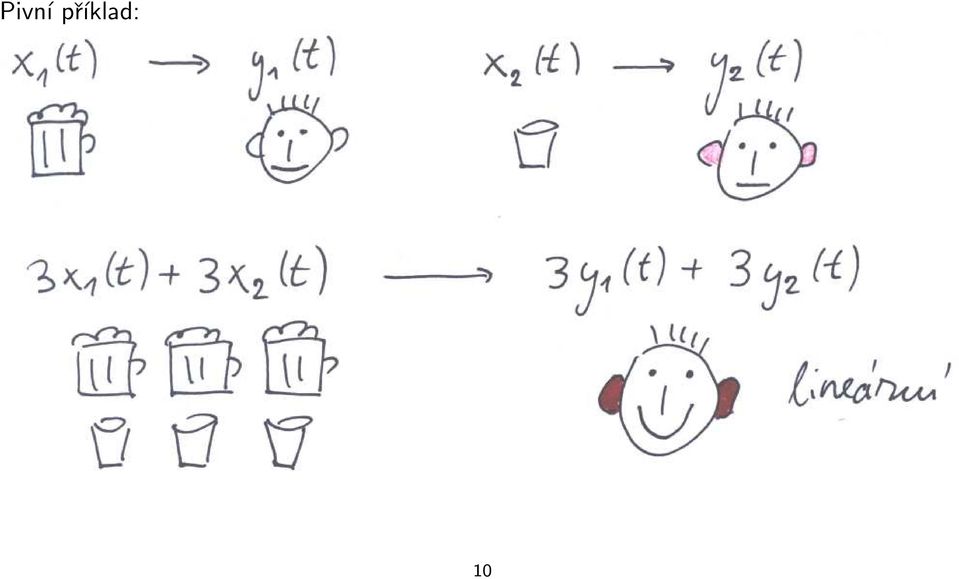
11 Seriózní příklad: y(t) = tx(t). Pro libovolné x 1 (t) a x 2 (t) budou výstupy: y 1 (t) = tx 1 (t) a y 2 (t) = tx 2 (t). Vyrobíme x 3 (t) = ax 1 (t) + bx 2 (t). Výstup: y 3 (t) = tx 3 (t) = t[ax 1 (t) + bx 2 (t)] = tax 1 (t) + tbx 2 (t) = ay 1 (t) + by 2 (t). Je to lineární. Linearita bude mít velký význam při analýze systémů: všechny vstupní signály budeme totiž rozkládat na jednotlivé impulsy, necháme je projít systémem. V případě, že je systém lineární, můžeme pak výstupní signál získat součtem reakcí na jednotlivé impulsy! 11
![Výstup: y 3 (t) = tx 3 (t) = t[ax 1 (t) + bx 2 (t)] = tax 1 (t) + tbx 2 (t) = ay 1 (t) + by 2 (t). Je to lineární.](/docs-images/42/4485643/images/page_11.jpg "Linearita bude mít velký význam při analýze systémů: všechny vstupní signály budeme totiž rozkládat na jednotlivé impulsy, necháme je")
12 LTI SYSTÉMY lineární, časově invariantní (linear, time-invariant). nejdůležitější charakteristika těchto systémů je impulsní odezva - jak systémy reagují na jednotkový impuls? Zajímá nás ovšem odezva systému na obecné signály x(t) nebo x[n], nejen na jednotkové impulsy. Určíme ji tak, že obecné signály na jednotkové impulsy rozložíme, spustíme s nimi několik impulsních odezev a pak zase sečteme! 12
 nebo x[n], nejen na jednotkové impulsy.")
13 Rozklad disk. signálu na jednotkové impulsy x[n] = + k= x[k]δ[n k]. Reakci systému na posunutý jednotkový impuls δ[n k] označíme h k [n]. Je-li systém časově invariantní (a žádné jiné nás momentálně nezajímají), pak jsou všechny h k [n] stejné jako základní h[n], pouze časově posunuté: h k [n] = h[n k]. 13

14 Každý posunutý jednotkový impuls x[k]δ[n k] odstartuje svou h[n k] a vynásobí ji svou velikostí. Vše se pak musí sečíst (linearita!), abychom dostali výsledek: y[n] = + k= x[k]h[n k] Tento vztah se nazývá konvoluční suma, krátce konvoluce; zapisujeme: y[n] = x[n] h[n] 14
![), abychom dostali výsledek: y[n] = + k= x[k]h[n k] Tento vztah se](/docs-images/42/4485643/images/page_14.jpg "nazývá konvoluční suma, krátce konvoluce; zapisujeme: y[n] = x[n]")
15 Příklad pro výše definované h[n] a x[n]: Na konvoluci se můžeme dívat také tak, že pod signál pro výpočet každého výstupního vzorku y[n] pod signál přiložíme obrácenou a patřičně posunutou impulsní odezvu, vzorky nad sebou vynásobíme a sečteme: 15
![výstupního vzorku y[n] pod signál přiložíme obrácenou a](/docs-images/42/4485643/images/page_15.jpg "patřičně posunutou impulsní odezvu, vzorky nad sebou")
16 k y[n] x[k] n= n= n= n= n= n= n= Konvoluce se velmi dobře předvádí s proužky papíru: napište si na papír x[n] a h[n], nezapomeňte u obou poznačit, kde je n = 0. obrat te h[n], sesad te časy n = 0. Právě jste dostali h[ k]. pokud nyní vynásobíte vzorky nad sebou a sečtete, dostanete výsledek y[0]. Pro další kladná n posouvejte h[ k] doprava. 16
![předvádí s proužky papíru: napište si na papír x[n] a h[n], nezapomeňte u obou poznačit, kde je n = 0. obrat te h[n], sesad te časy n = 0.](/docs-images/42/4485643/images/page_16.jpg "Právě jste dostali h[ k]. pokud nyní vynásobíte vzorky nad sebou a sečtete, dostanete výsledek y[0].")
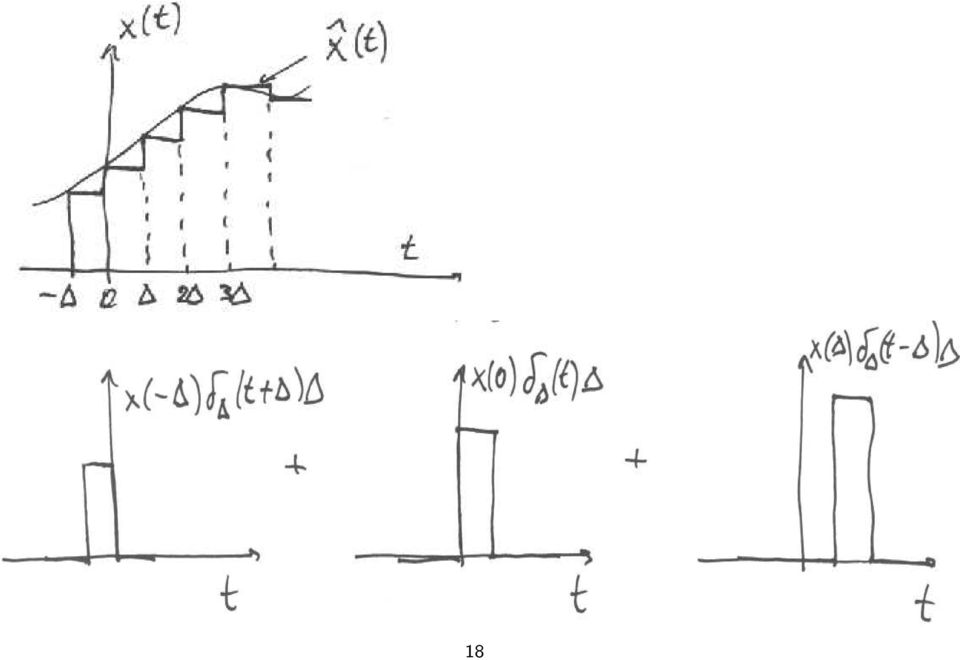
17 LTI systémy se spojitým časem budeme chtít podobným způsobem zapsat signál jako sadu impulsů. Jak to ale udělat, když je signál spojitý? Opět nám pomůže pomocná funkce δ (t) s šířkou a výškou 1 a silný svěrák. δ (t) = 1 pro 0 t 0 jinde Pokud bude dostatečně malé, můžeme signál aproximovat jako sumu posunutých a vynásobených δ (t). Aby se ˆx(t) dostal do stejné výšky jako původní x(t), nesmíme zapomenout na násobení každého impulsu hodnotou : ˆx(t) = k= x(k )δ (t k ). 17
. Aby se ˆx(t) dostal do stejné výšky jako původní x(t), nesmíme zapomenout na násobení každého impulsu hodnotou :")
18 18
19 Budeme-li nyní stlačovat svěrákem až k 0, z δ (t) se stane δ(t) a suma přejde na integrál. ˆx(t) už nebude aproximace, takže vynecháme stříšku: x(t) = + x(τ)δ(t τ)dτ. Každý impuls x(τ)δ(t τ) ovšem vybudí impulsní odezvu systému: δ(t) h(t), δ(t τ) h(t τ), x(τ)δ(t τ) x(τ)h(t τ) 19
dτ. Každý impuls x(τ)δ(t τ) ovšem vybudí impulsní odezvu systému:")
20 Lineární systém všechny takové odezvy sečte (integruje) přes všechna τ a dostaneme celkový výstup: y(t) = + x(τ)h(t τ)dτ. 20
 = + x(τ)h(t τ)dτ.")
21 Tento vztah se nazývá konvoluční integrál, zapisujeme: y(t) = x(t) h(t). Interpretace konvolučního integrálu: potřebujeme spočítat výstup pro nějaké t. Definujeme τ jako pomocnou časovou proměnnou, přes kterou se bude integrovat. x(τ) vypadá stejně jako x(t) (přejmenováním osy se nic nezmění). h(t τ) bude otočené a posunuté do času t. Pronásobíme, spočítáme integrál (když to jde, změříme plochu pod funkcí x(τ)h(t τ)) a máme jednu hodnotu výstupu pro čas t. Goto 1, pro další čas t. 21
22 s1(t) s2(t) 1 0,5 t s1( τ) t s2( τ) 1 0,5 t s2(1 τ) 1 0,5 t s1( τ )s2(1 τ) 1 y(1) 0,5 t s2(2 τ) 1 0,5 t s1( τ)s2(2 τ) 1 y(2) 0,5 t y(t) t 1 0, t
23 Konvoluce shrnutí y[n] = x[n] h[n] = y(t) = x(t) h(t) = + k= + x[k]h[n k] x(τ)h(t τ)dτ. VLASTNOSTI KONVOLUCE Komutativita: y[n] = x[n] h[n] = h[n] x[n] = + k= x[k]h[n k] = + k= h[k]x[n k] y(t) = x(t) h(t) = h(t) x(t) = + x(τ)h(t τ)dτ = + h(τ)x(t τ)dτ. Při počítání můžeme tedy bud zmrazit vstupní signál a otočit a posouvat imp. odezvu, nebo to udělat naopak. 23
24 Distributivita paralelní spojení systémů: y(t) = y 1 (t) + y 2 (t) = x(t) h 1 (t) + x(t) h 2 (t) = x(t) [h 1 (t) + h 2 (t)]. Systém má celkovou imp. odezvu h(t) = h 1 (t) + h 2 (t). Ověření: x(τ)h 1 (t τ)dτ+ x(τ)h 2 (t τ)dτ = x(τ)[h 1 (t τ)+h 2 (t τ)]dτ = x(t) [h 1 (t)+h 2 (t)], protože je lineární operace. Podobně pro diskrétní: y[n] = x[n] [h 1 [n] + h 2 [n]]. 24
25 Asociativita sériové spojení systémů: y(t) = [x(t) h 1 (t)] h 2 (t) = x(t) [h 1 (t) h 2 (t)]. Systém má celkovou imp. odezvu h(t) = h 1 (t) h 2 (t). Ověření: y(t) = v [ τ ] x(τ)h 1 (v τ)dτ h 2 (t v)dv = = přehození pořadí integrace = [ x(τ) v τ v v τ x(τ)h 1 (v τ)h 2 (t v)dτdv = x(τ)h 1 (v τ)h 2 (t v)dvdτ = ] h 1 (v τ)h 2 (t v)dv dτ =... Ve vnitřním integrálu změníme proměnnou: v = g + τ a využijeme toho, že: 25
26 g h 1(g)h 2 (t τ g)dg = h(t τ) takže výsledek je:... = x(t)[h 1 (t) h 2 (t)]. Podobně pro diskrétní systémy: y[n] = x[n] [h 1 [n] h 2 [n]]. Systémy s pamětí a bez : Bez paměti: impulsní odezva má jen 1 impuls pro čas 0: h[0] = Kδ[n], takže: y[n] = x[n] h[n] = + k= h(t) = Kδ(t), takže: y(t) = x[k]kδ[n k] = Kx[n]. + x(τ)kδ(t τ)dτ = Kx(t). Zvláštním případem systému bez paměti je identita (drát): h[n] = δ[n] h(t) = δ(t). 26
27 Kauzalita: Systém nesmí vidět do budoucna. Pro výpočet n-tého vzorku se smí použít jen vzorky < n. Pro výpočet t-tého času se smí použít jen časy < t. Toto je splněno, když: h[n] = 0 pro n < 0 h(t) = 0 pro t < 0 Malé opakování, jak se konvoluuje, otočená a posunutá imp. odezva nesmí zasahovat za čas n nebo t!. 27
28 28
29 U konvoluční sumy a integrálu můžeme v případě kauzálního systému omezit meze na: + x[k]h[n k] n x[k]h[n k], + h[k]x[n k] h[k]x[n k] k= k= k= k=0 + + x(τ)h(t τ)dτ h(τ)x(t τ)dτ t + 0 x(τ)h(t τ)dτ, h(τ)x(t τ)dτ. Stabilita: pokud je vstup omezený, výstup by měl být také nějak omezený... Splněno, pokud je imp. odezva absolutně sumabilní/integrabilní (terminologie?): + k= h[k] <, + h(t) dt <. 29
Modelov an ı syst em u a proces
 Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Modelování systémů a procesů 13. března 2012 Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3 Příklady na stavový popis dynamických systémů Obsah 1 Vnější popis systému 2 Vnitřní popis systému 3
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
[ n. Konvoluce. = 0 jinak. 0 jinak. Užitečné signály (diskrétní verze) Jednotkový skok 1 pro n = 0
 Jednotkový skok 1 pro n = 0") Užitečné signály (diskrétní verze) Konvoluce σ Jednotkový skok [ n] Jednotkový impuls (delta funkce) Posunutý jednotkový impuls 1 pro n 0 1 pro n = 0 δ = δ [ n] [ n k] = 0 jinak 0 jinak Proč jsou užitečné?
Užitečné signály (diskrétní verze) Konvoluce σ Jednotkový skok [ n] Jednotkový impuls (delta funkce) Posunutý jednotkový impuls 1 pro n 0 1 pro n = 0 δ = δ [ n] [ n k] = 0 jinak 0 jinak Proč jsou užitečné?
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Číslicové filtry. Honza Černocký, ÚPGM
 Číslicové filtry Honza Černocký, ÚPGM Aliasy Digitální filtry Diskrétní systémy Systémy s diskrétním časem atd. 2 Na co? Úprava signálů Zdůraznění Potlačení Detekce 3 Zdůraznění basy 4 Zdůraznění výšky
Číslicové filtry Honza Černocký, ÚPGM Aliasy Digitální filtry Diskrétní systémy Systémy s diskrétním časem atd. 2 Na co? Úprava signálů Zdůraznění Potlačení Detekce 3 Zdůraznění basy 4 Zdůraznění výšky
Lineární a adaptivní zpracování dat. 3. SYSTÉMY a jejich popis ve frekvenční oblasti
 Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Základní pojmy o signálech
 Základní pojmy o signálech klasifikace signálů transformace časové osy energie a výkon periodické signály harmonický signál jednotkový skok a impuls Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz
Základní pojmy o signálech klasifikace signálů transformace časové osy energie a výkon periodické signály harmonický signál jednotkový skok a impuls Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Laplaceova transformace
 Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Laplaceova transformace Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 5. přednáška 11MSP pondělí 23. března
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
1. března Organizace Základní informace Literatura Úvod Motivace... 3
 Modelování systémů a procesů (611MSP) Děčín přednáška 1 Vlček, Kovář, Přikryl 1. března 2012 Obsah 1 Organizace 1 1.1 Přednášející....................................... 1 1.2 Základní informace...................................
Modelování systémů a procesů (611MSP) Děčín přednáška 1 Vlček, Kovář, Přikryl 1. března 2012 Obsah 1 Organizace 1 1.1 Přednášející....................................... 1 1.2 Základní informace...................................
Necht tedy máme přirozená čísla n, k pod pojmem systém lineárních rovnic rozumíme rovnice ve tvaru
 2. Systémy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních rovnic s koeficienty z pole reálných případně komplexních čísel. Uvádíme podmínku pro existenci řešení systému lineárních
2. Systémy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních rovnic s koeficienty z pole reálných případně komplexních čísel. Uvádíme podmínku pro existenci řešení systému lineárních
Analýza a zpracování signálů. 5. Z-transformace
 Analýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X k jf j xk, je komplexní číslo r e r e k Oboustranná
Analýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X k jf j xk, je komplexní číslo r e r e k Oboustranná
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
PSK1-9. Číslicové zpracování signálů. Číslicový signál
 Název školy: Autor: Anotace: PSK1-9 Vyšší odborná škola a Střední průmyslová škola, Božetěchova 3 Ing. Marek Nožka Princip funkce číslicové filtrace signálu Vzdělávací oblast: Informační a komunikační
Název školy: Autor: Anotace: PSK1-9 Vyšší odborná škola a Střední průmyslová škola, Božetěchova 3 Ing. Marek Nožka Princip funkce číslicové filtrace signálu Vzdělávací oblast: Informační a komunikační
Michal Fusek. 10. přednáška z AMA1. Ústav matematiky FEKT VUT, Michal Fusek 1 / 62
 Nekonečné řady Michal Fusek Ústav matematiky FEKT VUT, fusekmi@feec.vutbr.cz 0. přednáška z AMA Michal Fusek (fusekmi@feec.vutbr.cz) / 62 Obsah Nekonečné číselné řady a určování jejich součtů 2 Kritéria
Nekonečné řady Michal Fusek Ústav matematiky FEKT VUT, fusekmi@feec.vutbr.cz 0. přednáška z AMA Michal Fusek (fusekmi@feec.vutbr.cz) / 62 Obsah Nekonečné číselné řady a určování jejich součtů 2 Kritéria
Lineární a adpativní zpracování dat. 3. Lineární filtrace I: Z-transformace, stabilita
 Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti
 Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
O řešení diferenční rovnice y(n+2) 1, 25y(n+1)+0, 78125y(n) = x(n + 2) x(n)
 1, 25y(n+1)+0, 78125y(n) = x(n + 2) x(n)") O řešení diferenční rovnice yn+), 5yn+)+0, 785yn) xn + ) xn) Prof. RNDr. Josef Diblík, DrSc. a Prof. Ing. Zdeněk Smékal, CSc. V příspěvku je řešena rovnice Abstrakt yn + ), 5yn + ) + 0, 785yn) xn + ) xn)
O řešení diferenční rovnice yn+), 5yn+)+0, 785yn) xn + ) xn) Prof. RNDr. Josef Diblík, DrSc. a Prof. Ing. Zdeněk Smékal, CSc. V příspěvku je řešena rovnice Abstrakt yn + ), 5yn + ) + 0, 785yn) xn + ) xn)
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
Lingebraické kapitolky - Počítání s maticemi
 Lingebraické kapitolky - Počítání s maticemi Jaroslav Horáček KAM MFF UK 20 Rozehřívačka: Definice sčítání dvou matic a násobení matice skalárem, transpozice Řešení: (A + B ij A ij + B ij (αa ij α(a ij
Lingebraické kapitolky - Počítání s maticemi Jaroslav Horáček KAM MFF UK 20 Rozehřívačka: Definice sčítání dvou matic a násobení matice skalárem, transpozice Řešení: (A + B ij A ij + B ij (αa ij α(a ij
ÚPGM FIT VUT Brno, periodické a harmonické posloupnosti. konvoluce Fourierova transformace s diskrétním časem
 Diskrétní signály a jejich frekvenční analýza. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz opakování základy o diskrétních signálech. periodické a harmonické posloupnosti operace s diskrétními
Diskrétní signály a jejich frekvenční analýza. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz opakování základy o diskrétních signálech. periodické a harmonické posloupnosti operace s diskrétními
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
1. Několik základních pojmů ze středoškolské matematiky. Na začátku si připomeneme následující pojmy:
 Opakování středoškolské matematiky Slovo úvodem: Tato pomůcka je určena zejména těm studentům presenčního i kombinovaného studia na VŠFS, kteří na středních školách neprošli dostatečnou průpravou z matematiky
Opakování středoškolské matematiky Slovo úvodem: Tato pomůcka je určena zejména těm studentům presenčního i kombinovaného studia na VŠFS, kteří na středních školách neprošli dostatečnou průpravou z matematiky
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Systémy. Systém: souhrn souvisejících prvků, sdružený do nějakého smysluplného celku
 Systémy Systém: souhrn souvisejících prvků, sdružený do nějakého smysluplného celku Pro nás: krabička něco dělající se signály: xt, xn něco do ní leze vstup ( ) [ ] něco z ní leze ven výstup yt ( ), yn
Systémy Systém: souhrn souvisejících prvků, sdružený do nějakého smysluplného celku Pro nás: krabička něco dělající se signály: xt, xn něco do ní leze vstup ( ) [ ] něco z ní leze ven výstup yt ( ), yn
FOURIEROVA TRANSFORMACE FOURIEROVA VĚTA
 FOURIEROVA TRANSFORMACE FOURIEROVA VĚTA V kapitole o Fourierových řadách byla dokázána Fourierova věta (připomeňte si, že f(x = (f(x + + f(x /2: VĚTA Necht f je po částech hladká na R a R f konverguje
FOURIEROVA TRANSFORMACE FOURIEROVA VĚTA V kapitole o Fourierových řadách byla dokázána Fourierova věta (připomeňte si, že f(x = (f(x + + f(x /2: VĚTA Necht f je po částech hladká na R a R f konverguje
Matematika IV 9. týden Vytvořující funkce
 Matematika IV 9. týden Vytvořující funkce Jan Slovák Masarykova univerzita Fakulta informatiky jaro 2015 Obsah přednášky 1 Vytvořující funkce a Fibonacciho čísla 2 Vytvořující funkce - připomenutí 3 Řešení
Matematika IV 9. týden Vytvořující funkce Jan Slovák Masarykova univerzita Fakulta informatiky jaro 2015 Obsah přednášky 1 Vytvořující funkce a Fibonacciho čísla 2 Vytvořující funkce - připomenutí 3 Řešení
Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. y + y = 4 sin t.
 1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
FOURIEROVA TRANSFORMACE
 FOURIEROVA TRANSFORMACE FOURIEROVA VĚTA V kapitole o Fourierových řadách byla dokázána (připomeňte si, že f(x) = (f(x + ) + f(x ))/2): VĚTA. Necht f je po částech hladká na R a R f konverguje. Potom f(x)
FOURIEROVA TRANSFORMACE FOURIEROVA VĚTA V kapitole o Fourierových řadách byla dokázána (připomeňte si, že f(x) = (f(x + ) + f(x ))/2): VĚTA. Necht f je po částech hladká na R a R f konverguje. Potom f(x)
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Inverzní z-transformace. prof. Miroslav Vlček. 25. dubna 2013
 Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
Cvičení ze statistiky - 3. Filip Děchtěrenko
 Cvičení ze statistiky - 3 Filip Děchtěrenko Minule bylo.. Dokončili jsme základní statistiky, typy proměnných a začali analýzu kvalitativních dat Tyhle termíny by měly být známé: Histogram, krabicový graf
Cvičení ze statistiky - 3 Filip Děchtěrenko Minule bylo.. Dokončili jsme základní statistiky, typy proměnných a začali analýzu kvalitativních dat Tyhle termíny by měly být známé: Histogram, krabicový graf
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
1 Mnohočleny a algebraické rovnice
 1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
Komplexní analýza. Laplaceova transformace. Martin Bohata. Katedra matematiky FEL ČVUT v Praze
 Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
označme j = (0, 1) a nazvěme tuto dvojici imaginární jednotkou. Potom libovolnou (x, y) = (x, 0) + (0, y) = (x, 0) + (0, 1)(y, 0) = x + jy,
 a nazvěme tuto dvojici imaginární jednotkou. Potom libovolnou (x, y) = (x, 0) + (0, y) = (x, 0) + (0, 1)(y, 0) = x + jy,") Komplexní čísla Množinu všech uspořádaných dvojic (x, y) reálných čísel x, y nazýváme množinou komplexních čísel C, jestliže pro každé dvě takové dvojice (x, y ), (x 2, y 2 ) je definována rovnost, sčítání
Komplexní čísla Množinu všech uspořádaných dvojic (x, y) reálných čísel x, y nazýváme množinou komplexních čísel C, jestliže pro každé dvě takové dvojice (x, y ), (x 2, y 2 ) je definována rovnost, sčítání
Kapitola 7: Integrál. 1/17
 Kapitola 7: Integrál. 1/17 Neurčitý integrál - Motivační příklad 2/17 Příklad: Necht se bod pohybuje po přímce rychlostí a) v(t) = 3 [m/s] (rovnoměrný přímočarý pohyb), b) v(t) = 2t [m/s] (rovnoměrně zrychlený
Kapitola 7: Integrál. 1/17 Neurčitý integrál - Motivační příklad 2/17 Příklad: Necht se bod pohybuje po přímce rychlostí a) v(t) = 3 [m/s] (rovnoměrný přímočarý pohyb), b) v(t) = 2t [m/s] (rovnoměrně zrychlený
Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)
![Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)](/thumbs/96/128965676.jpg "Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)") 1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
INTEGRÁLY S PARAMETREM
 INTEGRÁLY S PARAMETREM b a V kapitole o integraci funkcí více proměnných byla potřeba funkce g(x) = f(x, y) dy proměnné x. Spojitost funkce g(x) = b a f(x, y) dy proměnné x znamená vlastně prohození limity
INTEGRÁLY S PARAMETREM b a V kapitole o integraci funkcí více proměnných byla potřeba funkce g(x) = f(x, y) dy proměnné x. Spojitost funkce g(x) = b a f(x, y) dy proměnné x znamená vlastně prohození limity
Soustavy lineárních rovnic
 Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
Lineární algebra - I. část (vektory, matice a jejich využití)
") Lineární algebra - I. část (vektory, matice a jejich využití) Michal Fusek Ústav matematiky FEKT VUT, fusekmi@feec.vutbr.cz 2. přednáška z ESMAT Michal Fusek (fusekmi@feec.vutbr.cz) 1 / 40 Obsah 1 Vektory
Lineární algebra - I. část (vektory, matice a jejich využití) Michal Fusek Ústav matematiky FEKT VUT, fusekmi@feec.vutbr.cz 2. přednáška z ESMAT Michal Fusek (fusekmi@feec.vutbr.cz) 1 / 40 Obsah 1 Vektory
Úvod. Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali
 NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
VI. Maticový počet. VI.1. Základní operace s maticemi. Definice. Tabulku
 VI Maticový počet VI1 Základní operace s maticemi Definice Tabulku a 11 a 12 a 1n a 21 a 22 a 2n, a m1 a m2 a mn kde a ij R, i = 1,, m, j = 1,, n, nazýváme maticí typu m n Zkráceně zapisujeme (a ij i=1m
VI Maticový počet VI1 Základní operace s maticemi Definice Tabulku a 11 a 12 a 1n a 21 a 22 a 2n, a m1 a m2 a mn kde a ij R, i = 1,, m, j = 1,, n, nazýváme maticí typu m n Zkráceně zapisujeme (a ij i=1m
Číslicová filtrace. FIR filtry IIR filtry. ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
Lineární zobrazení. 1. A(x y) = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)
 = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)") 4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
základní vlastnosti, používané struktury návrhové prostředky MATLAB problém kvantování koeficientů
 A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
Riemannův určitý integrál
 Riemannův určitý integrál 1. Motivační příklad Příklad (Motivační příklad pro zavedení Riemannova integrálu). Nechť,. Vypočtěme obsah vybarvené oblasti ohraničené grafem funkce, osou a svislými přímkami
Riemannův určitý integrál 1. Motivační příklad Příklad (Motivační příklad pro zavedení Riemannova integrálu). Nechť,. Vypočtěme obsah vybarvené oblasti ohraničené grafem funkce, osou a svislými přímkami
Obecná rovnice kvadratické funkce : y = ax 2 + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených funkcí je množina reálných čísel.
 5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
Lineární algebra Operace s vektory a maticemi
 Lineární algebra Operace s vektory a maticemi Robert Mařík 26. září 2008 Obsah Operace s řádkovými vektory..................... 3 Operace se sloupcovými vektory................... 12 Matice..................................
Lineární algebra Operace s vektory a maticemi Robert Mařík 26. září 2008 Obsah Operace s řádkovými vektory..................... 3 Operace se sloupcovými vektory................... 12 Matice..................................
Předmět A3B31TES/Př. 13
 Předmět A3B31TES/Př. 13 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 13: Kvantování, modulace, stavový popis PS Předmět A3B31TES/Př. 13 květen 2015 1 / 28 Obsah 1 Kvantování 2 Modulace
Předmět A3B31TES/Př. 13 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 13: Kvantování, modulace, stavový popis PS Předmět A3B31TES/Př. 13 květen 2015 1 / 28 Obsah 1 Kvantování 2 Modulace
Fakt. Každou soustavu n lineárních ODR řádů n i lze eliminací převést ekvivalentně na jednu lineární ODR
 DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
Obsah Obyčejné diferenciální rovnice
 Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
Obsah 1 Obyčejné diferenciální rovnice 3 1.1 Základní pojmy............................................ 3 1.2 Obyčejné diferenciální rovnice 1. řádu................................ 5 1.3 Exaktní rovnice............................................
4.1 Řešení základních typů diferenciálních rovnic 1.řádu
 4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
VY_32_INOVACE_M-Ar 8.,9.20 Lineární funkce graf, definiční obor a obor hodnot funkce
 VY_32_INOVACE_M-Ar 8.,9.20 Lineární funkce graf, definiční obor a obor hodnot funkce Anotace: Prezentace zavádí pojmy lin. funkce, její definiční obor a obor hodnot funkce. Dále vysvětluje typy funkcí
VY_32_INOVACE_M-Ar 8.,9.20 Lineární funkce graf, definiční obor a obor hodnot funkce Anotace: Prezentace zavádí pojmy lin. funkce, její definiční obor a obor hodnot funkce. Dále vysvětluje typy funkcí
Operace s maticemi. 19. února 2018
 Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
1. Náhodný vektor (X, Y ) má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.
 má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.") VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Vzorová písemka č. 1 (rok 2015/2016) - řešení
 - řešení") Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
Operace s maticemi
 Operace s maticemi Seminář druhý 17.10. 2018 Obsah 1 Operace s maticemi 2 Hodnost matice 3 Regulární matice 4 Inverzní matice Matice Definice (Matice). Reálná matice typu m n je obdélníkové schema A =
Operace s maticemi Seminář druhý 17.10. 2018 Obsah 1 Operace s maticemi 2 Hodnost matice 3 Regulární matice 4 Inverzní matice Matice Definice (Matice). Reálná matice typu m n je obdélníkové schema A =
Soustava 2 lineárních rovnic o 2 neznámých 3 metody: Metoda sčítací
 Soustava 2 lineárních rovnic o 2 neznámých 3 metody: a Sčítací b Dosazovací c Substituce Metoda sčítací Cílem sčítací metody je sečíst 2 rovnice tak, aby se eliminovala odstranila jedna neznámá! Vždy se
Soustava 2 lineárních rovnic o 2 neznámých 3 metody: a Sčítací b Dosazovací c Substituce Metoda sčítací Cílem sčítací metody je sečíst 2 rovnice tak, aby se eliminovala odstranila jedna neznámá! Vždy se
12. Determinanty. 12. Determinanty p. 1/25
 12. Determinanty 12. Determinanty p. 1/25 12. Determinanty p. 2/25 Determinanty 1. Induktivní definice determinantu 2. Determinant a antisymetrické formy 3. Výpočet hodnoty determinantu 4. Determinant
12. Determinanty 12. Determinanty p. 1/25 12. Determinanty p. 2/25 Determinanty 1. Induktivní definice determinantu 2. Determinant a antisymetrické formy 3. Výpočet hodnoty determinantu 4. Determinant
Michal Zamboj. December 23, 2016
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
1 Mnohočleny a algebraické rovnice
 1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
Kristýna Kuncová. Matematika B3
 (5) Funkce více proměnných II Kristýna Kuncová Matematika B3 Kristýna Kuncová (5) Funkce více proměnných II 1 / 20 Parciální derivace - příklad Otázka Tabulka vpravo znázorňuje hodnoty funkce f (x, y).
(5) Funkce více proměnných II Kristýna Kuncová Matematika B3 Kristýna Kuncová (5) Funkce více proměnných II 1 / 20 Parciální derivace - příklad Otázka Tabulka vpravo znázorňuje hodnoty funkce f (x, y).
Logaritmické a exponenciální funkce
 Kapitola 4 Logaritmické a exponenciální funkce V této kapitole se budeme zabývat exponenciálními a logaritmickými funkcemi. Uvedeme si definice vlastnosti a vztah mezi nimi. 4.1 Exponenciální funkce Exponenciální
Kapitola 4 Logaritmické a exponenciální funkce V této kapitole se budeme zabývat exponenciálními a logaritmickými funkcemi. Uvedeme si definice vlastnosti a vztah mezi nimi. 4.1 Exponenciální funkce Exponenciální
V: Pro nulový prvek o lineárního prostoru L platí vlastnosti:
 Zpracoval: hypspave@fel.cvut.cz. Základní vlastnosti abstraktních lineárních prostorů. Lineární závislost, nezávislost, báze, souřadnice vzhledem k bázi, matice lineárního zobrazení vzhledem k bázím.skalární
Zpracoval: hypspave@fel.cvut.cz. Základní vlastnosti abstraktních lineárních prostorů. Lineární závislost, nezávislost, báze, souřadnice vzhledem k bázi, matice lineárního zobrazení vzhledem k bázím.skalární
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
úloh pro ODR jednokrokové metody
 Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
CVIČENÍ 4 Doc.Ing.Kateřina Hyniová, CSc. Katedra číslicového návrhu Fakulta informačních technologií České vysoké učení technické v Praze 4.
 CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
CVIČENÍ POZNÁMKY. CVIČENÍ. Vazby mezi systémy. Bloková schémata.vazby mezi systémy a) paralelní vazba b) sériová vazba c) zpětná (antiparalelní) vazba. Vnější popis složitých systémů a) metoda postupného
1 Extrémy funkcí - slovní úlohy
 1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
METRICKÉ A NORMOVANÉ PROSTORY
 PŘEDNÁŠKA 1 METRICKÉ A NORMOVANÉ PROSTORY 1.1 Prostor R n a jeho podmnožiny Připomeňme, že prostorem R n rozumíme množinu uspořádaných n tic reálných čísel, tj. R n = R } R {{ R }. n krát Prvky R n budeme
PŘEDNÁŠKA 1 METRICKÉ A NORMOVANÉ PROSTORY 1.1 Prostor R n a jeho podmnožiny Připomeňme, že prostorem R n rozumíme množinu uspořádaných n tic reálných čísel, tj. R n = R } R {{ R }. n krát Prvky R n budeme
Newtonova metoda. 23. října 2012
 Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
Hledání kořenů rovnic jedné reálné proměnné Newtonova metoda Michal Čihák 23. října 2012 Newtonova metoda (metoda tečen) využívá myšlenku, že tečna v daném bodě grafu funkce nejlépe aproximuje graf funkce
1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu
![1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu](/thumbs/102/155926571.jpg "1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu") [M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
[M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: =, 0 = 1 = 1. ln = +,
 a řešení Cauchyho úlohy: =, 0 = 1 = 1. ln = +,") Příklad Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: a) =, 0= b) =, = c) =2, = d) =2, 0= e) =, 0= f) 2 =0, = g) + =0, h) =, = 2 = i) =, 0= j) sin+cos=0,
Příklad Nalezněte obecné řešení diferenciální rovnice (pomocí separace proměnných) a řešení Cauchyho úlohy: a) =, 0= b) =, = c) =2, = d) =2, 0= e) =, 0= f) 2 =0, = g) + =0, h) =, = 2 = i) =, 0= j) sin+cos=0,
Funkce a lineární funkce pro studijní obory
 Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Analýza a zpracování signálů. 5. Z-transformace
 nalýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X j F j x, je omplexní číslo r e r e Oboustranná
nalýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X j F j x, je omplexní číslo r e r e Oboustranná
Analytická geometrie. c ÚM FSI VUT v Brně
 19. září 2007 Příklad 1. Příklad 2. Příklad 3. Příklad 1. Určete obecnou rovnici roviny, která prochází body A = [0, 1, 2], B = [ 1, 0, 3], C = [3, 1, 0]. Příklad 1. A = [0, 1, 2], B = [ 1, 0, 3], C =
19. září 2007 Příklad 1. Příklad 2. Příklad 3. Příklad 1. Určete obecnou rovnici roviny, která prochází body A = [0, 1, 2], B = [ 1, 0, 3], C = [3, 1, 0]. Příklad 1. A = [0, 1, 2], B = [ 1, 0, 3], C =
Soustavy lineárních rovnic a determinanty
 Soustavy lineárních rovnic a determinanty Petr Hasil Přednáška z matematiky Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny
Soustavy lineárních rovnic a determinanty Petr Hasil Přednáška z matematiky Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny
Úvodní informace Soustavy lineárních rovnic. 12. února 2018
 Úvodní informace Soustavy lineárních rovnic Přednáška první 12. února 2018 Obsah 1 Úvodní informace 2 Soustavy lineárních rovnic 3 Matice Frobeniova věta Úvodní informace Olga Majlingová : Na Okraji, místnost
Úvodní informace Soustavy lineárních rovnic Přednáška první 12. února 2018 Obsah 1 Úvodní informace 2 Soustavy lineárních rovnic 3 Matice Frobeniova věta Úvodní informace Olga Majlingová : Na Okraji, místnost
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Matematika 5 FSV UK, ZS Miroslav Zelený
 Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Teoretická elektrotechnika - vybrané statě
 Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
Teoretická elektrotechnika - vybrané statě David Pánek EK 63 panek50@kte.zcu.cz Fakulta elektrotechnická Západočeská univerzita v Plzni September 26, 202 David Pánek EK 63 panek50@kte.zcu.cz Teoretická
3. Reálná čísla. většinou racionálních čísel. V analytických úvahách, které praktickým výpočtům
 RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny K nejvýznamnějším patří množina reálných čísel, obsahující jako podmnožiny množiny přirozených, celých, racionálních a iracionálních
RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny K nejvýznamnějším patří množina reálných čísel, obsahující jako podmnožiny množiny přirozených, celých, racionálních a iracionálních