[CMT85] B etislav Chvála, Robert Matièka, and Jaroslav Talácko. Prνumyslové manipulátory a roboty. ÈVUT, Praha, ÈR, [CMT90] B etislav Chvála, Ro
|
|
|
- Libuše Pospíšilová
- před 6 lety
- Počet zobrazení:
Transkript
1 Úvodní poznámky Tyto podklady nenahrazují samostatné studium literatury. Jsou prùvodcem p edná kou a vymezují oblasti, které by student mìl samostatnì studovat. Jejich cílem je odstranit nutnost p ekreslovat slo ité obrázky èi p episovat dlouhé vzorce. P ipomínky k nejasnostem a upozornìní na chyby jsou vítány. Materiály se skládají jednak z kopií prùsvitek a jednak z poznámek k nim. Následuje p ehled dostupné literatury s jejím struèn m hodnocením. Seznam je maximálnì redundantní, aby se zlep ila dostupnost. Literatura dostupná v CMP je: velmi p ehledové a mìlké jsou knihy [Sta95, Val96], nejlep í rozbor kinematiky, statiky a dynamiky je v [AS86], dobr p ehled je v [McK91]. V knihovnì FSI na Karlovì námìstí jsou dostupné nap íklad knihy [TSV86, MT80, TM95, CMT85, CMT90]. Doporuèuji dávat p ednost novìj ím. Reference [AS86] Haruhiko Asada and Jean-Jacques E. Slotine. Robot Analysis and Control. John Wiley and Son, New York, USA,
2 [CMT85] B etislav Chvála, Robert Matièka, and Jaroslav Talácko. Prνumyslové manipulátory a roboty. ÈVUT, Praha, ÈR, [CMT90] B etislav Chvála, Robert Matièka, and Jaroslav Talácko. Prνumyslové roboty a manipulátory. SNTL, Praha, ÈR, [McK91] Phillip John McKerrow. Robotics. Addison-Wesley, [MT80] Introduction to Robert Matièka and Jaroslav Talácko. Mechanismy manipulátorνu a prνumyslov ch robotνu. SNTL, Praha, ÈR, [Sta95] [TM95] [TSV86] [Val96] Wolfram Stadler. Analytical Robotics and Mechatronics. McGraw-Hill, Jaroslav Talácko and Robert Matièka. Konstrukce prνumyslov ch robotνu a manipulátorνu. ÈVUT, Praha, ÈR, Jaroslav Talácko, Stanislav Stejskal, and Stejskal Vladimír. Industrial manipulators and robots I. ÈSVTS, Praha, Czech Republic, Michael Valá ek. Mechatronika. ÈVUT, Praha, ÈR,
3 Kinematika ffl Kinematika studuje geometrii pohybu robotu a trajektorie, po kter ch se pohybují jednotlivé body. Klíèov pojem je poloha. ffl Statika studuje vliv sil pùsobících na robota v klidu a jejich vliv na jeho deformace. Klíèov pojem je pru nost. ffl Dynamika analyzuje vliv sil a momentù na robota za pohybu. Pou ité pojmy a zákony mohou b t pou ity na jakékoliv mechanické stroje.
4 Terminologie ffl Vazba je omezení vzájemného pohybu dvou tìles. ffl Kinematická dvojice je dvojice tìles spojen ch vazbou. ffl Kloub je technické provedení vazby. ffl Rám je èást robotu nebo mechanismu, která je nepohyblivá, zpravidla spojená se zemí. ffl Chapadlo je èást robotu, která je urèena k manipulaci nástrojem nebo p edmìtem. ffl Kinematick etìzec je soustava kinematick ch dvojic. ffl Otev en kinematick etìzec je soustava, která lze popsat acyklick m grafem.
5 Dal í pojmy ffl Smí en kinematick etìzec je soustava kinematick ch dvojic, kde existuje smyèka. Viz Obr. 1. ffl Pracovní prostor je mno ina v ech bodù, kam je mo né nastavit chapadlo robota. Viz Obr. 3. ffl Operaèní prostor je prostor, kam zasahuje robot nìjakou svou èástí p i manipulaci. Viz Obr. 17. ffl Stupeò volnosti (DOF): Tìleso má tolik stupòù volnosti v daném bodì, kolik je dimenze prostoru, kam se mù e v daném bodì pohnout. 2-1
6 Obrázek 1: Smí en kinematick etìzec 2-2
7 Druhy kinematick ch dvojic Symbol Název má/odnímá DOF sférická 3 / 3 rotaèní 1 / 5 posuvná 1 / 5 válcová 1 / 5 plochá 3 / 3 Obrázek 2:
8 Typická struktura manipulátoru Pravoúhlá struktura Válcová (cylindrická) Sférická Angulární Obrázek 3:
9 Body in the coordinate system Tìleso v sou adném systému. Obrázek 4:
10 Tìleso v sou adném systému Tìleso v rovinì má 3 DOF. Tìleso v prostoru má 6 DOF. Zvolíme sou adn systém rámu O xyz, viz Obr. 4. S tìlesem svá eme sou adn systém O 0 x b y b z b. Popis sou adného systému O 0 x b y b z b v sou adném systému rámu je: ~ OO 0 = x o = x o y o z o 1 A ; n; t; b: Utvo me matici R = (n; t; b), n; t; b jsou jednotkové a ortogonální vektory, matice R je ortonormální, tedy R 1 = R T. Známe polohu bodu v sou adném systému O 0 x b y b z b : x b = u v w 1 systému O xyz: x = A a hledáme polohu v sou adném x y z 1 A. Viz Obr. 5. OP ~ 0 = OO ~ 0 + O~ 0 A + AB ~ + BP ~ x = x o + un + vt + wb 5-1
11 x = x o + Rx b Obrácená transformace: x b = R T x o + R T x Eulerovy úhly Matice R má devìt koeficientù, ale má hodnost pouze t i. Je tedy singulární, omezující podmínky jsou právì jednotkovost a kolmost vektorù n; t; b: n T t = 0 t T b = 0 b T n = 0 jnj = 1 jtj = 1 jbj = 1 Matici R lze snadno zkonstruovat pomocí Eulerov ch úhlù, viz Obr. 6: 1. Otoème sou adn systém O xyz okolo osy z o úhel ffi. Dostaneme O x 0 y 0 z. 2. Otoème sou adn systém O x 0 y 0 z okolo osy x 0 o úhel. Dostaneme O x 0 y 00 z Otoème sou adn systém O x 0 y 00 z 00 okolo osy z 00 o úhel ψ. Dostaneme O x b y b z b. R = R z (ffi)r x 0( )R z 00(ψ) 5-2
12 R z (ffi) = R x 0( ) = R z 00(ψ) = cos ffi sin ffi 0 sin ffi cos ffi cos sin 0 sin cos cos ψ sin ψ 0 sin ψ cos ψ Homogenní sou adnice Zaveïme homogenní sou adnice takto: 5-3
13 Euklidovské (metrické) x = x = x y z x=w y=w z=w 1 A ) x = 1 neexistuje (nevlastní bod) A ( x = Homogenní 0 x y z w ( x = 0 1 x y z 1 1 C A C A ^ w 6= 0 Lze snadno ukázat, e v homogenních sou adnicích: x = Ax b ; kde A je matice 4x4: A =» R xo x y z 0 1 C A Inverzní matice: A 1 =» R T R T x o
14 Transformace p es více sou adn ch systémù viz Obr. 7: x 0 = A 0 1 A1 2 A2 3 A3 4 :::An 1 n x n : 5-5
15 Coordinate transformation Transformace sou adnic x = x 0 + un + vt + wb Obrázek 5:
16 Definition of Euler angles Obrázek 6:
17 Consecutive coordinate transformations Posloupnost transformací sou adnic Obrázek 7:
18 Open kinematic chain Otev en kinematick etìzec Obrázek 8:
19 Modelování otev eného kinematického etìzce Otev en kinematick etìzec je tvo en posloupností tìles spojen ch klouby. Známe-li popis geometrick ch transformací pùsoben ch klouby, mù eme snadno nalézt transformace bodu ze sou adnic chapadla do sou adnic rámu a naopak. Jde o takzvanou p ímou kinematickou úlohu. Jednoznaèn a efektivní popis jednotliv ch transformací mù eme nalézt metodou Denavitovou Hartenbergo (Denavitova Hartenbergova notace). Viz Obr. 9. Popisujeme kloub i. 1. Nalezneme osy otáèení kloubù i 1, i, i Nalezneme p íèku (spoleènou normálu) os kloubù i 1 a i a os kloubù i a i Nalezneme body O i 1 ; H i ; O i. 4. Osu z i polo me do osy kloubu i Osu x i polo me do prodlou ení p íèky H i O i. 6. Osa y i tvo í s ostatními pravotoèivou soustavu. 7. Oznaème vzdálenost bodù O i 1 ; H i d i. 9-1
20 8. Oznaème vzdálenost bodù H i ; O i a i. 9. Oznaème úhel mezi p íèkami i. 10. Oznaème úhel mezi osami kloubù i a i + 1 ff i. 11. Pro rám je mo né zvolit polohu bodu O i kdekoliv na ose kloubu a osu x 0 orientovat libovolnì. Nap íklad tak, aby d i = Pro chapadlo je mo né opìt zvolit bod O n a orientaci osy z n p i dodr ení ostatních pravidel. 13. Jsou-li osy dvou po sobì jdoucích kloubù rovnobì né, je mo né polohu p íèky zvolit, nap íklad tak, e d i = Pro posuvné klouby lze polohu osy kloubu zvolit. Transformace v kloubu je zcela popsána èty mi parametry a i ; d i ; ff i ; i. Parametry a i ; ff i jsou konstanty, jeden z parametrù d i ; i se mìní s pohybem kloubu. Klouby jsou vìt inou: ffl Otoèné, pak je d i konstanta a i se mìní, ffl Posuvné, pak je i a d i se mìní. 9-2
21 Transformaèní matici A pak vypoèteme jako A i 1 i = A i 1 int Aint i ; kde A i 1 int = A i 1 int = Snadno zjistíme, e: A i 1 i = cos i sin i 0 0 sin i cos i d i a i 0 cos ff i sin ff i 0 0 sin ff i cos ff i ; : cos i sin i cos ff i sin i sin ff i a i cos ff i sin i cos i cos ff i cos i sin ff i a i sin ff i 0 sin ff i cos ff i d i : Oznaème q i ten z parametrù i, d i, kter se mìní. V raz pak mù eme p epsat na x 0 = A 0 1(q 1 )A 1 2(q 2 )A 2 3(q 3 )A 3 4(q 4 ) :::A n 1 n (q n )x n : Pro ka dou hodnotu vektoru q = (q 1 ;q 2 ;q 3 ;q 4 ;:::q n ) 2 Q = R n pak mù eme vypoèítat sou adnice bodu P v 9-3
22 sou adnicích rámu ze zadan ch sou adnic v sou adné soustavì chapadla a naopak. P ímá kinematická úloha pro otev en kinematick etìzec je tedy v dy e itelná analyticky. Inverzní kinematická úloha Inverzní kinematickou ulohou naz váme problém, kdy je dána matice T(q) = A 0 1(q 1 )A 1 2(q 2 )A 2 3(q 3 )A 3 4(q 4 ) :::A n 1 n (q n ): a hledáme hodnoty koeficientù q. Obecnì se jedná o soustavu nelineárních (vìt inou trigonometrick ch) rovnic, která není analyticky e itelná. e ení inverzní kinematické úlohy: ffl Analyticky, pokud to lze, neexistuje návod, jak e it. ffl Numericky. ffl Tabulkou, p edpoèítanou pro pracovní prostor W ρ Q. Existují struktury robotu, které lze e it analyticky, takové struktury naz váme e itelné. Postaèující podmínka pro e itelnost struktury je nap. to, e pro robota se esti stupni volnosti t i po 9-4
23 sobì jdoucí rotaèní klouby mají osy protínající se v jednom bodì nezávisle na pohybu. Jinou vlastností IKM je její nejednoznaènost v singulárních bodech. Èasto existuje podprostor Q s prostoru Q, kter dává stejné T. 8q 2 Q s : T(q) = T Pro rozhodnutí, kterou z n-tic q e ících rovnici zvolíme, se bere v úvahu zejména: 1. Jsou uva ované hodnoty vektoru q p ípustné (robot nemù e typicky zdaleka dosáhnout v ech hodnot z prostoru kloubov ch sou adnic). 2. Jak se do singulárního bodu dostaneme (z kterého smìru jsme p i li). Z po adavku spojitého pohybu po trajektorii plyne, e i n-tice q musí b t spojitou funkcí èasu. 3. Jak m smìrem se ze singulárního bodu dostaneme (kam pokraèuje trajektorie). 4. Nedostaneme se volbou q bìhem dal ího pohybu do situace, kdy nepùjde splnit p edchozí body. 5. Samotn operaèní prostor nás omezuje p i volbì q. P íkladem je montá sedadla do automobilu robotem. 9-5
24 Nìkdy navrhujeme takzvanì redundantního robota (nap íklad s osmi stupni volnosti), abychom zvìt ili prostor Q s, z kterého vybíráme q a tak mohli lépe vyhovìt v e uveden m po adavkùm. Úlohy k zamy lení: ffl Lze sestrojit robota pouze s posuvn mi klouby, kter by mohl obecnì manipulovat s tìlesem v prostoru? Proè? ffl Vyberte si nìjakou montá ní úlohu a navrhnìte pro ni vhodnou strukturu redundantního robota. 9-6
25 The Denavit-Hartenberg notation Obrázek 9:
26 Adjacent coordinate frames in DH Sousední sou adné systémy v DH Obrázek 10:
27 Position of end effector in base coordinate system Poloha chapadla v sou adném systému rámu Obrázek 11:
28 Base and end effector coordinate frames in DH Sou adné systémy rámu a chapadla Obrázek 12:
29 5-R-1-P manipulator Obrázek 13:
30 Structure of 5-R-1-P manipulator Obrázek 14:
31 Multiple configurations Nejednoznaènost inverzní kinematické úlohy Obrázek 15:
32 PUMA Obrázek 16:
33 Working space Obrázek 17:
34 Obrázek 18: Smí en kinematick etìzec Obrázek 19: Smí en kinematick etìzec



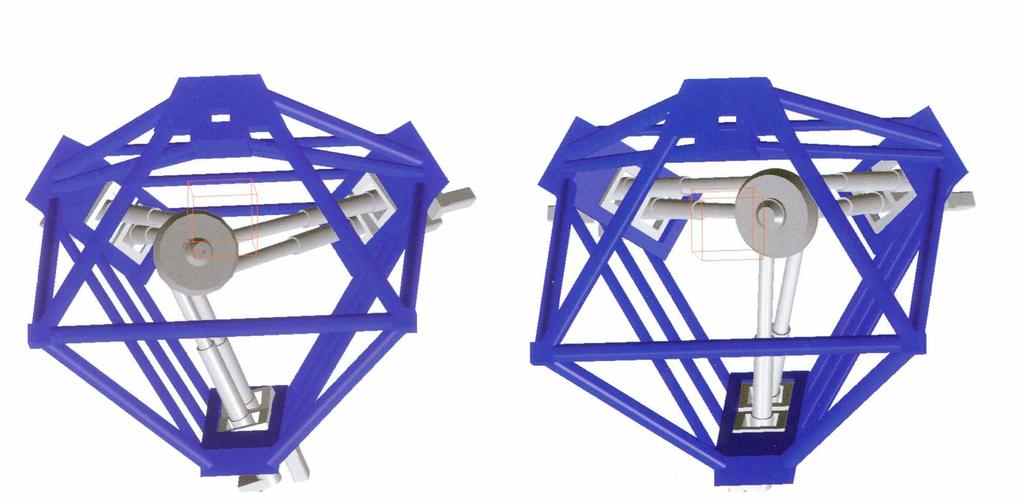
35 Obrázek 20: Hexapod, skuteèn stroj a jeho model.
36


37 Obrázek 21: Hexapod, umístìní shora
38 Diferenciální kinematika Diferenciální kinematika zkoumá pohyb v malém okolí chapadla. Zab vá se rychlostí pohybu chapadla a jejím vlivem na rychlosti a zrychlení v kloubech. 22-1
39 Diferenciální kinematika Differential kinematics Obrázek 22: 2 DOF manipulátor Obrázek 23: Infinitezimální rotaèní vector
40 Diferenciální kinematika Differential kinematics Obrázek 24:
41 Rychlost v okolí singulárního bodu Velocity near singular point Obrázek 25: 2 DOF planární manipulátor Obrázek 26: Trajektorie, prùbìh rychlostí
Kinematika. Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha.
 Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Kinematika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Úvodní poznámky a literatura. Robotika. Úvodní poznámky a literatura. Vladimír Smutný. Centrum strojového vnímání
 a literatura Robotika Úvodní poznámky a literatura Vladimír Smutný Centrum strojového vnímání Český institut informatiky, robotiky a kybernetiky (CIIRC) České vysoké učení technické v Praze Tyto podklady
a literatura Robotika Úvodní poznámky a literatura Vladimír Smutný Centrum strojového vnímání Český institut informatiky, robotiky a kybernetiky (CIIRC) České vysoké učení technické v Praze Tyto podklady
Mechanika
 Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Mechanika Kinematika 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
Přímá a inverzní kinematika otevřených kinematických řetězců. Robotika. Přímá a inverzní kinematika otevřených kinematických řetězců.
 Přímá a inverzní kinematika otevřených kinematických řetězců Robotika Přímá a inverzní kinematika otevřených kinematických řetězců Vladimír Smutný Centrum strojového vnímání Český institut informatiky,
Přímá a inverzní kinematika otevřených kinematických řetězců Robotika Přímá a inverzní kinematika otevřených kinematických řetězců Vladimír Smutný Centrum strojového vnímání Český institut informatiky,
Mechanika. Použité pojmy a zákony mohou být použity na jakékoliv mechanické stroje.
 Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
Mechanika Kinematika studuje geometrii pohybu robotu a trajektorie, po kterých se pohybují jednotlivé body. Klíčový pojem je poloha. Statika studuje vliv sil působících na robota v klidu a jejich vliv
ZÁKLADY ROBOTIKY Kinematika a topologie robotů
 ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
ZÁKLADY ROBOTIKY Kinematika a topologie Ing. Josef Černohorský, Ph.D. TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018. 3. Reálná čísla
 Moderní technologie ve studiu aplikované fyziky CZ..07/..00/07.008 3. Reálná čísla RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny. K nejvýznamnějším patří množina reálných čísel,
Moderní technologie ve studiu aplikované fyziky CZ..07/..00/07.008 3. Reálná čísla RACIONÁLNÍ A IRACIONÁLNÍ ČÍSLA Význačnými množinami jsou číselné množiny. K nejvýznamnějším patří množina reálných čísel,
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
ZÁPISKY Z ANALYTICKÉ GEOMETRIE 1 SOUŘADNICE, BODY
 1 Souřadnice, body 1.1 Prostor prostor můžeme chápat jako nějaké prostředí, ve kterém můžeme mít různé věci na různých místech místo, poloha - tohle potřebujeme nějak popsat abychom mohli změřit nebo říci,
1 Souřadnice, body 1.1 Prostor prostor můžeme chápat jako nějaké prostředí, ve kterém můžeme mít různé věci na různých místech místo, poloha - tohle potřebujeme nějak popsat abychom mohli změřit nebo říci,
c sin Příklad 2 : v trojúhelníku ABC platí : a = 11,6 dm, c = 9 dm, α = 65 0 30. Vypočtěte stranu b a zbývající úhly.
 9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
9. Úvod do středoškolského studia - rozšiřující učivo 9.. Další znalosti o trojúhelníku 9... Sinova věta a = sin b = sin c sin Příklad : V trojúhelníku BC platí : c = 0 cm, α = 45 0, β = 05 0. Vypočtěte
Matematický model kamery v afinním prostoru
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Matematický model kamery v afinním prostoru (Verze 1.0.1) Jan Šochman, Tomáš Pajdla sochmj1@cmp.felk.cvut.cz, pajdla@cmp.felk.cvut.cz CTU CMP 2002
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Matematický model kamery v afinním prostoru (Verze 1.0.1) Jan Šochman, Tomáš Pajdla sochmj1@cmp.felk.cvut.cz, pajdla@cmp.felk.cvut.cz CTU CMP 2002
v trojúhelníku P QC sestrojíme vý¹ky na základnu a jedno rameno, patu vý¹ky na rameno oznaèíme R a patu na základnu S
 Øe¹ení 5. série IV. roèníku kategorie JUNIOR RS-IV-5-1 Pro na¹e úvahy bude vhodné upravit si na¹í rovnici do tvaru 3 jx 1 4 j+2 = 5 + 4 sin 2x: Budeme uva¾ovat o funkci na pravé stranì na¹í rovnice, tj.
Øe¹ení 5. série IV. roèníku kategorie JUNIOR RS-IV-5-1 Pro na¹e úvahy bude vhodné upravit si na¹í rovnici do tvaru 3 jx 1 4 j+2 = 5 + 4 sin 2x: Budeme uva¾ovat o funkci na pravé stranì na¹í rovnice, tj.
Line rn oper tory v euklidovsk ch prostorech V t to sti pou ijeme obecn v sledky o line rn ch oper torech ve vektorov ch prostorech nad komplexn mi sl
 Line rn oper tory v euklidovsk ch prostorech V t to sti pou ijeme obecn v sledky o line rn ch oper torech ve vektorov ch prostorech nad komplexn mi sly z p edchoz ch kapitol k podrobn j mu zkoum n line
Line rn oper tory v euklidovsk ch prostorech V t to sti pou ijeme obecn v sledky o line rn ch oper torech ve vektorov ch prostorech nad komplexn mi sly z p edchoz ch kapitol k podrobn j mu zkoum n line
Kinematika robotických systémů
 Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Kinematika robotických systémů prof. Ing. Michael Valášek, DrSc. ČVUT v Praze Tato prezentace je spolufinancována Evropským sociálním fondem a státním rozpočtem České republiky. 1 Obsah Postup modelování
Mechanismy. Vazby členů v mechanismech (v rovině):
:") Mechanismy Mechanismus klikový, čtyřkloubový, kulisový, západkový a vačkový jsou nejčastějšími mechanismy ve strojích (kromě převodů). Mechanismy obsahují členy (kliky, ojnice, těhlice, křižáky a další).
Mechanismy Mechanismus klikový, čtyřkloubový, kulisový, západkový a vačkový jsou nejčastějšími mechanismy ve strojích (kromě převodů). Mechanismy obsahují členy (kliky, ojnice, těhlice, křižáky a další).
ROBOTIKA. univerzální Rozdělení manipulačních zařízení podle způsobu řízení: jednoúčelové manipulátory
 ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
ROBOTIKA je obor zabývající se teorií, konstrukcí a využitím robotů slovo robot bylo poprvé použito v roce 1920 ve hře Karla Čapka R.U.R (Rossum s Universal Robots pro umělou bytost) Robot je stroj, který
Příklad 1.3: Mocnina matice
 Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
Řešení stavových modelů, módy, stabilita. Toto cvičení bude věnováno hledání analytického řešení lineárního stavového modelu. V matematickém jazyce je takový model ničím jiným, než sadou lineárních diferenciálních
1.7. Mechanické kmitání
 1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
1.7. Mechanické kmitání. 1. Umět vysvětlit princip netlumeného kmitavého pohybu.. Umět srovnat periodický kmitavý pohyb s periodickým pohybem po kružnici. 3. Znát charakteristické veličiny periodického
Skalární sou in. Úvod. Denice skalárního sou inu
 Skalární sou in Jedním ze zp sob, jak m ºeme dva vektory kombinovat, je skalární sou in. Výsledkem skalárního sou inu dvou vektor, jak jiº název napovídá, je skalár. V tomto letáku se nau íte, jak vypo
Skalární sou in Jedním ze zp sob, jak m ºeme dva vektory kombinovat, je skalární sou in. Výsledkem skalárního sou inu dvou vektor, jak jiº název napovídá, je skalár. V tomto letáku se nau íte, jak vypo
2 Trochu teorie. Tab. 1: Tabulka pˇrepravních nákladů
 Klíčová slova: Dopravní problém, Metody k nalezení výchozího ˇrešení, Optimální ˇrešení. Dopravní problém je jednou z podskupin distribuční úlohy (dále ještě problém přiřazovací a obecná distribuční úloha).
Klíčová slova: Dopravní problém, Metody k nalezení výchozího ˇrešení, Optimální ˇrešení. Dopravní problém je jednou z podskupin distribuční úlohy (dále ještě problém přiřazovací a obecná distribuční úloha).
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH
 DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
DIPLOMOVÁ PRÁCE OPTIMALIZACE MECHANICKÝCH VLASTNOSTÍ MECHANISMU TETRASPHERE Vypracoval: Jaroslav Štorkán Vedoucí práce: prof. Ing. Michael Valášek, DrSc. CÍLE PRÁCE Sestavit programy pro kinematické, dynamické
geometrická (trigonometrická, nebo goniometrická) metoda (podstata, vhodnost)
 metoda (podstata, vhodnost)") 1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1. Nalezení pólu pohybu u mechanismu dle obrázku. 3 body 2. Mechanismy metoda řešení 2 body Vektorová metoda (podstata, vhodnost) - P:mech. se popíše vektor rovnicí suma.ri=0 a následně provede sestavení
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY
 PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
PRŮMYSLOVÉ ROBOTY A MANIPULÁTORY Pojem ROBOT zavedl český spisovatel Karel Čapek v roce 1920 v divadelní hře R.U.R. (Rosums Universal Robots) DEFINICE ROBOTU Robot (průmyslový) je automatické manipulační
Metodický list pro první soustředění kombinovaného studia. předmětu MATEMATIKA A
 Metodický list pro první soustředění kombinovaného studia předmětu MATEMATIKA A Název tématického celku: Zobrazení,reálné funkce jedné reálné proměnné,elementární funkce a jejich základní vlastnosti,lineární
Metodický list pro první soustředění kombinovaného studia předmětu MATEMATIKA A Název tématického celku: Zobrazení,reálné funkce jedné reálné proměnné,elementární funkce a jejich základní vlastnosti,lineární
Matematika I Ètvercové matice - determinanty
 Matematika I Ètvercové matice - determinanty RNDr. Renata Klufová, Ph. D. Jihoèeská univerzita v Èeských Budìjovicích EF Katedra aplikované matematiky a informatiky Co u¾ známe? vektory - základní operace
Matematika I Ètvercové matice - determinanty RNDr. Renata Klufová, Ph. D. Jihoèeská univerzita v Èeských Budìjovicích EF Katedra aplikované matematiky a informatiky Co u¾ známe? vektory - základní operace
a m1 a m2 a mn zobrazení. Operaci násobení u matic budeme definovat jiným způsobem.
 1 Matice Definice 1 Matice A typu (m, n) je zobrazení z kartézského součinu {1, 2,,m} {1, 2,,n} do množiny R Matici A obvykle zapisujeme takto: a 1n a 21 a 22 a 2n A =, a m1 a m2 a mn kde a ij R jsou její
1 Matice Definice 1 Matice A typu (m, n) je zobrazení z kartézského součinu {1, 2,,m} {1, 2,,n} do množiny R Matici A obvykle zapisujeme takto: a 1n a 21 a 22 a 2n A =, a m1 a m2 a mn kde a ij R jsou její
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren
 Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Robotické architektury pro účely NDT svarových spojů komplexních potrubních systémů jaderných elektráren Projekt TA ČR č. TA01020457: Výzkum, vývoj a validace univerzální technologie pro potřeby moderních
Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního a experimentálního modelová
 Robert Grepl MODELOVÁNÍ MECHATRONICKÝCH SYSTÉMÙ V MATLAB SIMMECHANICS Praha 2007 Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního
Robert Grepl MODELOVÁNÍ MECHATRONICKÝCH SYSTÉMÙ V MATLAB SIMMECHANICS Praha 2007 Podìkování: Výsledkù publikovaných v této knize bylo dosaženo také za podpory projektù GAÈR 101/06/P108 Výzkum simulaèního
Matematika II Limita a spojitost funkce, derivace
 Matematika II Limita a spojitost funkce, derivace RNDr. Renata Klufová, Ph. D. Jihoèeská univerzita v Èeských Budìjovicích EF Katedra aplikované matematiky a informatiky Prstencové a kruhové okolí bodu
Matematika II Limita a spojitost funkce, derivace RNDr. Renata Klufová, Ph. D. Jihoèeská univerzita v Èeských Budìjovicích EF Katedra aplikované matematiky a informatiky Prstencové a kruhové okolí bodu
Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)
![Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)](/thumbs/96/128965676.jpg "Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)") 1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
Proudìní fotosférického plazmatu po sluneèním povrchu
 Proudìní fotosférického plazmatu po sluneèním povrchu M. Klvaòa, Astronomický ústav Akademie vìd Èeské republiky, observatoø Ondøejov, Èeská republika, mklvana@asu.cas.cz M. Švanda, Matematicko-fyzikální
Proudìní fotosférického plazmatu po sluneèním povrchu M. Klvaòa, Astronomický ústav Akademie vìd Èeské republiky, observatoø Ondøejov, Èeská republika, mklvana@asu.cas.cz M. Švanda, Matematicko-fyzikální
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018. 4. Komplexní čísla
 Moderní technologie ve studiu aplikované fyiky CZ.1.07/..00/07.0018 4. Komplexní čísla Matematickým důvodem pro avedení komplexních čísel ( latinského complexus složený), byla potřeba rošířit množinu (obor)
Moderní technologie ve studiu aplikované fyiky CZ.1.07/..00/07.0018 4. Komplexní čísla Matematickým důvodem pro avedení komplexních čísel ( latinského complexus složený), byla potřeba rošířit množinu (obor)
Semestrální práce z p edm tu URM (zadání), 2014/2015:
, 2014/2015:") Semestrální práce z p edm tu URM (zadání), 2014/2015: 1. Vyzna te na globusu cestu z jihu Grónska na jih Afriky, viz Obrázek 1. V po áte ní a cílové destinaci bude zapíchnutý ²pendlík sm ující do st edu
Semestrální práce z p edm tu URM (zadání), 2014/2015: 1. Vyzna te na globusu cestu z jihu Grónska na jih Afriky, viz Obrázek 1. V po áte ní a cílové destinaci bude zapíchnutý ²pendlík sm ující do st edu
Regresní analýza. Statistika II. Jiří Neubauer. Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.
 Statistika II Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Cíl regresní analýzy: stanovení formy (trendu, tvaru, průběhu) této závislosti pomocí vhodné funkce
Statistika II Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Cíl regresní analýzy: stanovení formy (trendu, tvaru, průběhu) této závislosti pomocí vhodné funkce
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Metoda konečných prvků. 6. přednáška Tělesové prvky - úvod (lineární trojúhelník a lineární čtyřstěn) Martin Vrbka, Michal Vaverka
 Martin Vrbka, Michal Vaverka") Metoda konečných prvků 6. přednáška Tělesové prvky - úvod (lineární trojúhelník a lineární čtyřstěn) Martin Vrbka, Michal Vaverka Diskretizace Analýza pomocí MKP vyžaduje rozdělení řešené oblasti na konečný
Metoda konečných prvků 6. přednáška Tělesové prvky - úvod (lineární trojúhelník a lineární čtyřstěn) Martin Vrbka, Michal Vaverka Diskretizace Analýza pomocí MKP vyžaduje rozdělení řešené oblasti na konečný
(3) Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)
 Zvolíme pevné z a sledujme dráhu, kterou opisuje s postupujícím časem koncový bod vektoru E v rovině z = konst. Upravíme vztahy (2) a (3)") Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
Učební tet k přednášce UFY1 Předpokládejme šíření rovinné harmonické vln v kladném směru os z. = i + j kde i, j jsou jednotkové vektor ve směru os respektive a cos ( ) ω ϕ t kz = + () = cos( ωt kz+ ϕ )
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Exponenciála matice a její užití. fundamentálních matic. Užití mocninných řad pro rovnice druhého řádu
 1 Tutoriál č. 3 Exponenciála matice a její užití řešení Cauchyovy úlohy pro lineární systémy užitím fundamentálních matic. Užití mocninných řad pro rovnice druhého řádu 0.1 Exponenciála matice a její užití
1 Tutoriál č. 3 Exponenciála matice a její užití řešení Cauchyovy úlohy pro lineární systémy užitím fundamentálních matic. Užití mocninných řad pro rovnice druhého řádu 0.1 Exponenciála matice a její užití
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Projekt OPVK - CZ.1.07/1.1.00/ Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Analytická geometrie v prostoru, vektory, přímky Autor:
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Geometrie Různé metody řešení Téma: Analytická geometrie v prostoru, vektory, přímky Autor:
( x ) 2 ( ) 2.5.4 Další úlohy s kvadratickými funkcemi. Předpoklady: 2501, 2502
 2 ( ) 2.5.4 Další úlohy s kvadratickými funkcemi. Předpoklady: 2501, 2502") .5. Další úlohy s kvadratickými funkcemi Předpoklady: 50, 50 Pedagogická poznámka: Tato hodina patří mezi ty méně organizované. Společně řešíme příklad, při dalším počítání se třída rozpadá. Já řeším příklady
.5. Další úlohy s kvadratickými funkcemi Předpoklady: 50, 50 Pedagogická poznámka: Tato hodina patří mezi ty méně organizované. Společně řešíme příklad, při dalším počítání se třída rozpadá. Já řeším příklady
10 je 0,1; nebo taky, že 256
 LIMITY POSLOUPNOSTÍ N Á V O D Á V O D : - - Co to je Posloupnost je parta očíslovaných čísel. Trabl je v tom, že aby to byla posloupnost, musí těch čísel být nekonečně mnoho. Očíslovaná čísla, to zavání
LIMITY POSLOUPNOSTÍ N Á V O D Á V O D : - - Co to je Posloupnost je parta očíslovaných čísel. Trabl je v tom, že aby to byla posloupnost, musí těch čísel být nekonečně mnoho. Očíslovaná čísla, to zavání
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5. ROČNÍKOVÁ PRÁCE Teoretické řešení střech
 Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
Gymnázium Christiana Dopplera, Zborovská 45, Praha 5 ROČNÍKOVÁ PRÁCE Teoretické řešení střech Vypracoval: Michal Drašnar Třída: 8.M Školní rok: 2015/2016 Seminář: Deskriptivní geometrie Prohlašuji, že
 Role obálek D FFT spektra p i TSR invariantním rozpoznávání obrazu Kate ina Nováková, Jaromír Kukal VUT Praha, Fakulta jaderná a fyzikáln in en rská V CHT Praha, Ústav po íta ové a ídící techniky Abstrakt:
Role obálek D FFT spektra p i TSR invariantním rozpoznávání obrazu Kate ina Nováková, Jaromír Kukal VUT Praha, Fakulta jaderná a fyzikáln in en rská V CHT Praha, Ústav po íta ové a ídící techniky Abstrakt:
-V- novinka. Paralelní chapadla HGPC 7.7. nízké náklady. kompaktnost. spolehlivost díky zajištění síly úchopu
 nízké náklady kompaktnost spolehlivost díky zajištění síly úchopu 2006/10 změny vyhrazeny výrobky 2007 1/-1 hlavní údaje Přehled všeobecné údaje Těleso kompaktních paralelních chapadel s nízkými náklady
nízké náklady kompaktnost spolehlivost díky zajištění síly úchopu 2006/10 změny vyhrazeny výrobky 2007 1/-1 hlavní údaje Přehled všeobecné údaje Těleso kompaktních paralelních chapadel s nízkými náklady
Kinematika robotických systémů
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Kinematika robotických systémů Učební texty k semináři Autoři: Prof. Ing. Michael Valášek, DrSc. (ČVUT v Praze) Datum: 18.2.2011 Centrum pro rozvoj výzkumu pokročilých řídicích
Úlohy k pøedná¹ce NMAG 102: Lineární algebra a geometrie 2, 2016
 Úlohy k øedná¹ce NMG : Lineární algebra a geometrie, Verze ze dne kvìtna Toto je seznam øímoèarých øíkladù k øedná¹ce Úlohy z tohoto seznamu je nezbytnì nutné umìt øe¹it Oakování Nech» = ; ; a = rostoru
Úlohy k øedná¹ce NMG : Lineární algebra a geometrie, Verze ze dne kvìtna Toto je seznam øímoèarých øíkladù k øedná¹ce Úlohy z tohoto seznamu je nezbytnì nutné umìt øe¹it Oakování Nech» = ; ; a = rostoru
DERIVACE. ln 7. Urči, kdy funkce roste a klesá a dále kdy je konkávní a
 DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
DERIVACE 1. Zderivuj funkci y = ln 2 (sin x + tg x 2 ) 2. Zderivuj funkci y = 2 e x2 cos x 3. Zderivuj funkci y = 3 e sin2 (x 2 ) 4. Zderivuj funkci y = x3 +2x 2 +sin x x 5. Zderivuj funkci y = cos2 x
ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH
 ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH Vypracoval: Jan Vojtíšek Třída: 8.M Školní rok: 2011/2012 Seminář: Aplikace Deskriptivní geometrie Prohlašuji, že jsem svou ročníkovou práci napsal samostatně a
ROČNÍKOVÁ PRÁCE TEORETICKÉ ŘEŠENÍ STŘECH Vypracoval: Jan Vojtíšek Třída: 8.M Školní rok: 2011/2012 Seminář: Aplikace Deskriptivní geometrie Prohlašuji, že jsem svou ročníkovou práci napsal samostatně a
6. Matice. Algebraické vlastnosti
 Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA I, zimní semestr 2000/2001 Michal Marvan 6 Matice Algebraické vlastnosti 1 Algebraické operace s maticemi Definice Bud te A,
Matematický ústav Slezské univerzity v Opavě Učební texty k přednášce ALGEBRA I, zimní semestr 2000/2001 Michal Marvan 6 Matice Algebraické vlastnosti 1 Algebraické operace s maticemi Definice Bud te A,
DYNAMICKÉ VÝPOČTY PROGRAMEM ESA PT
 DYNAMICKÉ VÝPOČTY PROGRAMEM ESA PT Doc. Ing. Daniel Makovička, DrSc.*, Ing. Daniel Makovička** *ČVUT v Praze, Kloknerův ústav, Praha 6, **Statika a dynamika konstrukcí, Kutná Hora 1 ÚVOD Obecně se dynamickým
DYNAMICKÉ VÝPOČTY PROGRAMEM ESA PT Doc. Ing. Daniel Makovička, DrSc.*, Ing. Daniel Makovička** *ČVUT v Praze, Kloknerův ústav, Praha 6, **Statika a dynamika konstrukcí, Kutná Hora 1 ÚVOD Obecně se dynamickým
Dynamika tuhých těles
 Dynamika tuhých těles V reálných technických aplikacích lze model bodového tělesa použít jen v omezené míře. Mnohem častější je použití modelu tuhého tělesa. Tuhé těleso je definováno jako těleso, u něhož
Dynamika tuhých těles V reálných technických aplikacích lze model bodového tělesa použít jen v omezené míře. Mnohem častější je použití modelu tuhého tělesa. Tuhé těleso je definováno jako těleso, u něhož
ZADÁVACÍ DOKUMENTACE
 ZADÁVACÍ DOKUMENTACE veřejné zakázky malého rozsahu DODÁVKA TRANSPORTNÍCH VENTILÁTORŮ zadávané mimo režim zákona č. 137/2006 Sb., o veřejných zakázkách, ve znění pozdějších předpisů (dále jen ZVZ ) Zadavatel:
ZADÁVACÍ DOKUMENTACE veřejné zakázky malého rozsahu DODÁVKA TRANSPORTNÍCH VENTILÁTORŮ zadávané mimo režim zákona č. 137/2006 Sb., o veřejných zakázkách, ve znění pozdějších předpisů (dále jen ZVZ ) Zadavatel:
Vypracovat přehled paralelních kinematických struktur. Vytvořit model a provést analýzu zvolené PKS
 Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Autor BP: Vedoucí práce: Tomáš Kozák Ing. Jan Zavřel, Ph.D. Vypracovat přehled paralelních kinematických struktur Vytvořit model a provést analýzu zvolené PKS Provést simulaci zvolené PKS Provést optimalizaci
Statistika pro geografy. Rozd lení etností DEPARTMENT OF GEOGRAPHY
 Statistika pro geografy Rozd lení etností DEPARTMENT OF GEOGRAPHY Faculty of Science Palacký University Olomouc t. 17. listopadu 1192/12, 771 46 Olomouc Pojmy etnost = po et prvk se stejnou hodnotou statistického
Statistika pro geografy Rozd lení etností DEPARTMENT OF GEOGRAPHY Faculty of Science Palacký University Olomouc t. 17. listopadu 1192/12, 771 46 Olomouc Pojmy etnost = po et prvk se stejnou hodnotou statistického
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi
 6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
6. přednáška z předmětu GIS1 Souřadnicové systémy a transformace mezi nimi Vyučující: Ing. Jan Pacina, Ph.D. e-mail: jan.pacina@ujep.cz Pro přednášku byly použity texty a obrázky od Ing. Magdaleny Čepičkové
POČÍTAČOVÁ PODPORA ZPRACOVÁNÍ TÝMOVÝCH PROJEKTŮ - MATHCAD
 Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní POČÍTAČOVÁ PODPORA ZPRACOVÁNÍ TÝMOVÝCH PROJEKTŮ - MATHCAD Mathcad návody do cvičení Ing. Milada Hlaváčková, Ph.D. Ostrava 2011 Tyto studijní
Vysoká škola báňská Technická univerzita Ostrava Fakulta strojní POČÍTAČOVÁ PODPORA ZPRACOVÁNÍ TÝMOVÝCH PROJEKTŮ - MATHCAD Mathcad návody do cvičení Ing. Milada Hlaváčková, Ph.D. Ostrava 2011 Tyto studijní
Mechanika II.A Třetí domácí úkol
 Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Mechanika II.A Třetí domácí úkol (Zadání je částečně ze sbírky: Lederer P., Stejskal S., Březina J., Prokýšek R.: Sbírka příkladů z kinematiky. Skripta, vydavatelství ČVUT, 2003.) Vážené studentky a vážení
Geometrické transformace pomocí matic
 Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere
 NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHERE Design of Spherical Mechanism HexaSphere Matěj Karásek, Michael Valášek, Josef Zicha, Petr Svatoš Abstract: The paper deals with a new type of spherical mechanism
ŠROUBOVICE. 1) Šroubový pohyb. 2) Základní pojmy a konstrukce
 Šroubový pohyb. 2) Základní pojmy a konstrukce") 1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
Výukové texty. pro předmět. Automatické řízení výrobní techniky (KKS/ARVT) na téma
 na téma") Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
Výukové texty pro předmět Automatické řízení výrobní techniky (KKS/ARVT) na téma Podklady a grafická vizualizace k určení souřadnicových systémů výrobních strojů Autor: Doc. Ing. Josef Formánek, Ph.D.
MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU
 , Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
, Robert Grepl MODELOVÁNí MECHATRONICKÝCH, o SYSTEMU V MATLAB SIMMECHANICS Praha 2007 1ECHNICI(4,} (/1"ERATURP- @ I)I~~ ii I ,-- Obsah, 1 UvoII 7, 11 Motivace: dvojité kyvadlo 9 111 Odvození pohybové rovnice
KINEMATICKÉ ELEMENTY K 5 PLASTOVÉ. doc. Ing. Martin Hynek, Ph.D. a kolektiv. verze - 1.0
 Katedra konstruování stroj Fakulta strojní K 5 PLASTOVÉ KINEMATICKÉ ELEMENTY doc. Ing. Martin Hynek, Ph.D. a kolektiv verze - 1.0 Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpo
Katedra konstruování stroj Fakulta strojní K 5 PLASTOVÉ KINEMATICKÉ ELEMENTY doc. Ing. Martin Hynek, Ph.D. a kolektiv verze - 1.0 Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpo
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
Obsah a průběh zkoušky 1PG
 Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Obsah a průběh zkoušky PG Zkouška se skládá z písemné a ústní části. Písemná část (cca 6 minut) dvě konstrukční úlohy dle části po. bodech a jedna úloha výpočetní úloha dle části za bodů. Ústní část jedna
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Marta Vomlelová marta@ktiml.mff.cuni.cz
 Strojové učení Úvod, lineární regrese Marta Vomlelová marta@ktiml.mff.cuni.cz References [1] P. Berka. Dobývání znalostí z databází. Academia, 2003. [2] T. Hastie, R. Tishirani, and J. Friedman. The Elements
Strojové učení Úvod, lineární regrese Marta Vomlelová marta@ktiml.mff.cuni.cz References [1] P. Berka. Dobývání znalostí z databází. Academia, 2003. [2] T. Hastie, R. Tishirani, and J. Friedman. The Elements
Úvod Typy promítání Matematický popis promítání Implementace promítání Literatura. Promítání. Pavel Strachota. FJFI ČVUT v Praze
 Promítání Pavel Strachota FJFI ČVUT v Praze 30. března 2011 Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání 4 Implementace promítání Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání
Promítání Pavel Strachota FJFI ČVUT v Praze 30. března 2011 Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání 4 Implementace promítání Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání
Rovnice přímky. s = AB = B A. X A = t s tj. X = A + t s, kde t R. t je parametr. x = a 1 + ts 1 y = a 2 + ts 2 z = a 3 + ts 3. t R
 Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Text m ºe být postupn upravován a dopl ován. Datum poslední úpravy najdete u odkazu na staºení souboru. Veronika Sobotíková
 Tento text není samostatným studijním materiálem. Jde jen o prezentaci promítanou na p edná²kách, kde k ní p idávám slovní komentá. N které d leºité ásti látky pí²u pouze na tabuli a nejsou zde obsaºeny.
Tento text není samostatným studijním materiálem. Jde jen o prezentaci promítanou na p edná²kách, kde k ní p idávám slovní komentá. N které d leºité ásti látky pí²u pouze na tabuli a nejsou zde obsaºeny.
Integrování jako opak derivování
 Integrování jako opak derivování V tomto dokumentu budete seznámeni s derivováním b ºných funkcí a budete mít moºnost vyzkou²et mnoho zp sob derivace. Jedním z nich je proces derivování v opa ném po adí.
Integrování jako opak derivování V tomto dokumentu budete seznámeni s derivováním b ºných funkcí a budete mít moºnost vyzkou²et mnoho zp sob derivace. Jedním z nich je proces derivování v opa ném po adí.
Střední škola automobilní Ústí nad Orlicí
 Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
Síla Základní pojmy Střední škola automobilní Ústí nad Orlicí vzájemné působení těles, které mění jejich pohybový stav nebo tvar zobrazuje se graficky jako úsečka se šipkou ve zvoleném měřítku m f je vektor,
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací.
 jako náprava hnací.") 1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
1 NÁPRAVA De-Dion Představuje přechod mezi tuhou nápravou a nápravou výkyvnou. Používá se (výhradně) jako náprava hnací. Skříň rozvodovky spojena s rámem zmenšení neodpružené hmoty. Přenos točivého momentu
9 Kolmost vektorových podprostorů
 9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
9 Kolmost vektorových podprostorů Od kolmosti dvou vektorů nyní přejdeme ke kolmosti dvou vektorových podprostorů. Budeme se zabývat otázkou, kdy jsou dva vektorové podprostory na sebe kolmé a jak to poznáme.
Matematika pro chemické inženýry. Drahoslava Janovská
 Matematika pro chemické inženýry Drahoslava Janovská Přednášky ZS 2011-2012 Fázové portréty soustav nelineárních diferenciálních rovnic Obsah 1 Fázové portréty nelineárních soustav v rovině Klasifikace
Matematika pro chemické inženýry Drahoslava Janovská Přednášky ZS 2011-2012 Fázové portréty soustav nelineárních diferenciálních rovnic Obsah 1 Fázové portréty nelineárních soustav v rovině Klasifikace
Výsledky testování školy. Druhá celoplošná generální zkouška ověřování výsledků žáků na úrovni 5. a 9. ročníků základní školy. Školní rok 2012/2013
 Výsledky testování školy Druhá celoplošná generální zkouška ověřování výsledků žáků na úrovni 5. a 9. ročníků základní školy Školní rok 2012/2013 Základní škola Obříství, okres Mělník Termín zkoušky: 13.
Výsledky testování školy Druhá celoplošná generální zkouška ověřování výsledků žáků na úrovni 5. a 9. ročníků základní školy Školní rok 2012/2013 Základní škola Obříství, okres Mělník Termín zkoušky: 13.
Matematika 2 (Fakulta ekonomická) Cvičení z lineární algebry. TU v Liberci
 Cvičení z lineární algebry. TU v Liberci") Matematika 2 (Fakulta ekonomická) Cvičení z lineární algebry TU v Liberci Jiří Hozman 1. dubna 2010 Cvičení 2 Příklad 1. Rozhodněte, zda lze vektor x vyjádřit jako lineární kombinaci vektorů u, v, w, v
Matematika 2 (Fakulta ekonomická) Cvičení z lineární algebry TU v Liberci Jiří Hozman 1. dubna 2010 Cvičení 2 Příklad 1. Rozhodněte, zda lze vektor x vyjádřit jako lineární kombinaci vektorů u, v, w, v
Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor)
 (varianta 2: RRPR manipulátor)") Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Technická zpráva Katedra kybernetiky, Fakulta aplikovaných věd Západočeská univerzita v Plzni Přímá a inverzní kinematika manipulátoru pro NDT (implementační poznámky) (varianta 2: RRPR manipulátor) 22.
Jméno: P íjmení: Datum: 17. ledna 2018 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu.
: vadí mi vystavení mého hodnocení na internetu.") Jméno: P íjmení: Datum: 7. ledna 28 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu. Rotující nádoba Otev ená válcová nádoba napln ná do poloviny vý²ky
Jméno: P íjmení: Datum: 7. ledna 28 Nechci zápo et p i hodnocení niº²ím neº (nezávazné): vadí mi vystavení mého hodnocení na internetu. Rotující nádoba Otev ená válcová nádoba napln ná do poloviny vý²ky
(0, y) 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení
 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení") .. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
.. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
Press kit Můžeme se zdravou stravou vyvarovat střevních zánětů?
 Press kit Můžeme se zdravou stravou vyvarovat střevních zánětů? 1 Chronické střevní problémy trápí stále více pacientů V posledních letech roste počet těch, kteří se potýkají s chronickými střevními záněty.
Press kit Můžeme se zdravou stravou vyvarovat střevních zánětů? 1 Chronické střevní problémy trápí stále více pacientů V posledních letech roste počet těch, kteří se potýkají s chronickými střevními záněty.
na tyč působit moment síly M, určený ze vztahu (9). Periodu kmitu T tohoto kyvadla lze určit ze vztahu:
. Periodu kmitu T tohoto kyvadla lze určit ze vztahu:") Úloha Autoři Zaměření FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE 2. Měření modulu pružnosti v tahu a modulu pružnosti ve smyku Martin Dlask Měřeno 11. 10., 18. 10., 25. 10. 2012 Jakub Šnor SOFE Klasifikace
Úloha Autoři Zaměření FYZIKÁLNÍ PRAKTIKUM FJFI ČVUT V PRAZE 2. Měření modulu pružnosti v tahu a modulu pružnosti ve smyku Martin Dlask Měřeno 11. 10., 18. 10., 25. 10. 2012 Jakub Šnor SOFE Klasifikace
5.2.1 Matematika povinný předmět
 5.2.1 Matematika povinný předmět Učební plán předmětu 1. ročník 2. ročník 3. ročník 6. ročník 7. ročník 8. ročník 9. ročník 4 4+1 4+1 4+1 4+1 4 4 3+1 4+1 Vzdělávací oblast Matematika a její aplikace v
5.2.1 Matematika povinný předmět Učební plán předmětu 1. ročník 2. ročník 3. ročník 6. ročník 7. ročník 8. ročník 9. ročník 4 4+1 4+1 4+1 4+1 4 4 3+1 4+1 Vzdělávací oblast Matematika a její aplikace v
Matematický model malířského robota
 Matematický model malířského robota Ing. Michal Bruzl 1,a, Ing. Vyacheslav Usmanov 2,b, doc. Ing. Pavel Svoboda, CSc. 3,c,Ing. Rostislav Šulc, Ph.D. 4,d 1,2,3,4 Katedra technologie staveb (K122), Fakulta
Matematický model malířského robota Ing. Michal Bruzl 1,a, Ing. Vyacheslav Usmanov 2,b, doc. Ing. Pavel Svoboda, CSc. 3,c,Ing. Rostislav Šulc, Ph.D. 4,d 1,2,3,4 Katedra technologie staveb (K122), Fakulta
106/2001 Sb. VYHLÁŠKA Ministerstva zdravotnictví ze dne 2. března 2001 o hygienických požadavcích na zotavovací akce pro děti
 106/2001 Sb. VYHLÁŠKA Ministerstva zdravotnictví ze dne 2. března 2001 o hygienických požadavcích na zotavovací akce pro děti Ministerstvo zdravotnictví stanoví podle 108 odst. 1 zákona č. 258/2000 Sb.,
106/2001 Sb. VYHLÁŠKA Ministerstva zdravotnictví ze dne 2. března 2001 o hygienických požadavcích na zotavovací akce pro děti Ministerstvo zdravotnictví stanoví podle 108 odst. 1 zákona č. 258/2000 Sb.,
PALETOVÉ REGÁLY SUPERBUILD NÁVOD NA MONTÁŽ
 PALETOVÉ REGÁLY SUPERBUILD NÁVOD NA MONTÁŽ Charakteristika a použití Příhradový regál SUPERBUILD je určen pro zakládání všech druhů palet, přepravek a beden všech rozměrů a pro ukládání kusového, volně
PALETOVÉ REGÁLY SUPERBUILD NÁVOD NA MONTÁŽ Charakteristika a použití Příhradový regál SUPERBUILD je určen pro zakládání všech druhů palet, přepravek a beden všech rozměrů a pro ukládání kusového, volně
Metodická pomůcka pro hodnotitele
 Metodická pomůcka pro hodnotitele Hodnocení činnosti vysokých škol a jejich součástí Akreditační komisí listopad 2015 Hodnocení vysokých škol Dle článku 3 Statutu Akreditační komise provádí Akreditační
Metodická pomůcka pro hodnotitele Hodnocení činnosti vysokých škol a jejich součástí Akreditační komisí listopad 2015 Hodnocení vysokých škol Dle článku 3 Statutu Akreditační komise provádí Akreditační
Kluzné uložení a prvky pro nastavení výšky
 Přehled produktů 6.0 Kluzné uložení pro optimální kompenzaci teplotní dilatace 6.1 Sada kluzná H3G 6.2 Příklady použití sady kluzné H3G a 2G 6.3 Příklady použití sady kluzné H3G a 2G 6.4 Zásady kluzného
Přehled produktů 6.0 Kluzné uložení pro optimální kompenzaci teplotní dilatace 6.1 Sada kluzná H3G 6.2 Příklady použití sady kluzné H3G a 2G 6.3 Příklady použití sady kluzné H3G a 2G 6.4 Zásady kluzného
4 DVOJMATICOVÉ HRY. Strategie Stiskni páku Sed u koryta. Stiskni páku (8, 2) (5, 3) Sed u koryta (10, 2) (0, 0)
 (5, 3) Sed u koryta (10, 2) (0, 0)") 4 DVOJMATICOVÉ HRY Strategie Stiskni páku Sed u koryta Stiskni páku (8, 2) (5, 3) Sed u koryta (10, 2) (0, 0) 125 DVOJMATICOVÁ HRA Je-li speciálně množina hráčů Q = {1, 2} a prostory strategií S 1, S 2
4 DVOJMATICOVÉ HRY Strategie Stiskni páku Sed u koryta Stiskni páku (8, 2) (5, 3) Sed u koryta (10, 2) (0, 0) 125 DVOJMATICOVÁ HRA Je-li speciálně množina hráčů Q = {1, 2} a prostory strategií S 1, S 2