Aplikace. Středové promítání. A s. Výpočet pohybu kamery rekonstrukcí videosekvence 3D rekonstrukce objektů 3D modelování
|
|
|
- Marcel Ševčík
- před 8 lety
- Počet zobrazení:
Transkript
1 Aplikace Výpočet pohybu kamery rekonstrukcí videosekvence 3D rekonstrukce objektů 3D modelování Středové promítání σ A S B S...střed promítání ν...průmětna σ...centrální rovina σ π, S σ π A s B σ, neexistuje středový průmět

2 Nevlastní prvky Nevlastní bod (směr) přímky a... bod, společný všem přímkám rovnoběžným s přímkou a. Nevlastní body všech přímek roviny tvoří nevlastní přímku roviny. Nevlastní přímka roviny je určena dvěma nevlastními body roviny. Rovnoběžné roviny mají stejnou nevlastní přímku. p p p U α β a b U U u V u Průmět rovnoběžných přímek U a b U S N b b s U s ν průmětna S střed promítání N stopník přímky a U S úběžník přímky a a S středový průmět přímky a ν a s N a Středovým průmětem rovnoběžných přímek a b, které nejsou průčelné, jsou různoběžky a s, b s, jejich průsečík U s je průmětem společného nevlastního bodu U.

3 Afinní prostor Afinním m prostorem budeme rozumět neprázdnou množinu A, na které je zvolen nějaký vektorový prostor V a dáno zobrazení f : A x V A, f(x,u) = X + u (sčítání bodu a vektoru) splňující :. (X + u) + v = X + ( u + v ) pro každé X A a každé u, v V. označíme-li symbolem f O zobrazení V A, f O (u) = ( O + u ) pro každé u V, je f O vzájemně jednoznačným zobrazením. Vektorový prostor V nazýváme zaměř ěření afinního prostoru A, někdy ho značíme i V(A). Prvky A nazýváme body afinního prostoru, o vektorech ze zaměření hovoříme volně jako o vektorech z afinního prostoru. y O u v x O f u O + = + ( + ) f u v O u v A + v = B v = B A Reálný afinní prostor ( x y z) Body: X =,,, Vektory: u =, u, u, u 3 Sčítání vektorů Součet bodu a vektoru Rovina (A,W ) Zaměření roviny u W Afinní zobrazení f : A n A m (, x, x, x ) (, x, x, x ) 3 3 (,,, 3 ) (,,, 3 ) (,,, 3 3 ) (,,, ) (,,, ) (,,, ) u + v = u u u + v v v = u + v u + v u + v X + v = x y z + v v v = x + v y + v z + v a + a x + a y + a z = 3 ( x y z) ( a a a a ),,,,,, = X a = u a = X X, X = AX + b A...matice adjungovaného lineárního zobrazení x 3 = b a a a x x b a a a 3 x x 3 b3 a3 a3 a33 x3 (, u, u, u ) (, u, u, u ) 3 3 u 3 = b a a a u u b a a a 3 u u 3 b3 a3 a3 a33 u3 3

4 Projektivní rozšíření reálné afinní roviny Homogenní souřadnice bodu Nechť (A,V ) je afinní rovina vektory V : o, u,u ~ k o, u,u k nevlastní body v P body A (, x,y) ~ k ( x,x,x ) k vlastní Body třídy ekvivalence Přímky {,( ) } { } B = x,x,x x,x,x o {, } P = x,x,x a x + a x + a x = X a X a = a X = Přímka určená dvěma body a=(ab) A a A a = a = A B B a B a = Průsečík dvou přímek P=m n P m P m = P = m n P n P n = p p p U V u Model projektivní roviny {,( ) } { } B = x,x,x x,x,x o {, } P = x,x,x a x + a x + a x = Nevlastní body x = Vnořená afinní rovina x ( x,x,x ) ~,, (, x,y) x x = x x x = x x x y = x 4
 } { } B = x,x,x x,x,x o {, } P = x,x,x a x + a x + a x = Nevlastní body x = Vnořená afinní rovina x ( x,x,x ) ~,, (, x,y) x x = x x x = x x x y =")
5 Projektivní rozšíření reálného afinního prostoru Homogenní souřadnice bodu Nechť (A 3,V 3 ) je afinní prostor 3 vektory V : o, u,u,u3 ~ k o, u,u,u3 k nevlastní 3 body v P 3 body A (, x,y,z) ~ k ( x,x,x, x3 ) k vlastní Body třídy ekvivalence (, B = x,x,x x3 ), ( x,,x,x x3 ) o Roviny (, R = x,x,x x ), a x + a x + a x + a x = { } { } } ( x x x x3)( a a a a3) ( x x x )( a a a a ),,,,,, =,,,,,, = 3 3 X a X a = a X = α β a b U U u Projektivní zobrazení 5
( a a a a3) ( x x x )( a a a a ),,,,,, =,,,,,, = 3 3 X a X a = a X = α β a b U U u Projektivní")
6 Dělící dvojpoměr Dělící dvojpoměr je invariantem projektivního zobrazení Analytické vyjádření projektivního zobrazení : n m f P P, f X = AX řídou matic ka, k je určeno jediné projektivní zobrazení. Projektivita P n P n je jednoznačně určena obrazy n+ bodů, z nichž žádných n+ bodů neleží v téže nadrovině matice A(n+,n+) n +n dof n+ bodů n(n+) dof 6

7 Vlastnosti matice zobrazení a a a a m : n m f P P, f X = AX Sloupce matice zobrazení jsou obrazy vektorů báze. Řádky v projekční matici jsou roviny, které se zobrazí do souřadnicových rovin Př: Množina bodů, které se zobrazí na nevlastní nadrovinu x = a x + a x + a x = n n Př: Množina bodů, které se zobrazí na souř. nadrovinu x i = x = a x + a x + a x = i i i in n Projektivní zobrazení roviny P P 7

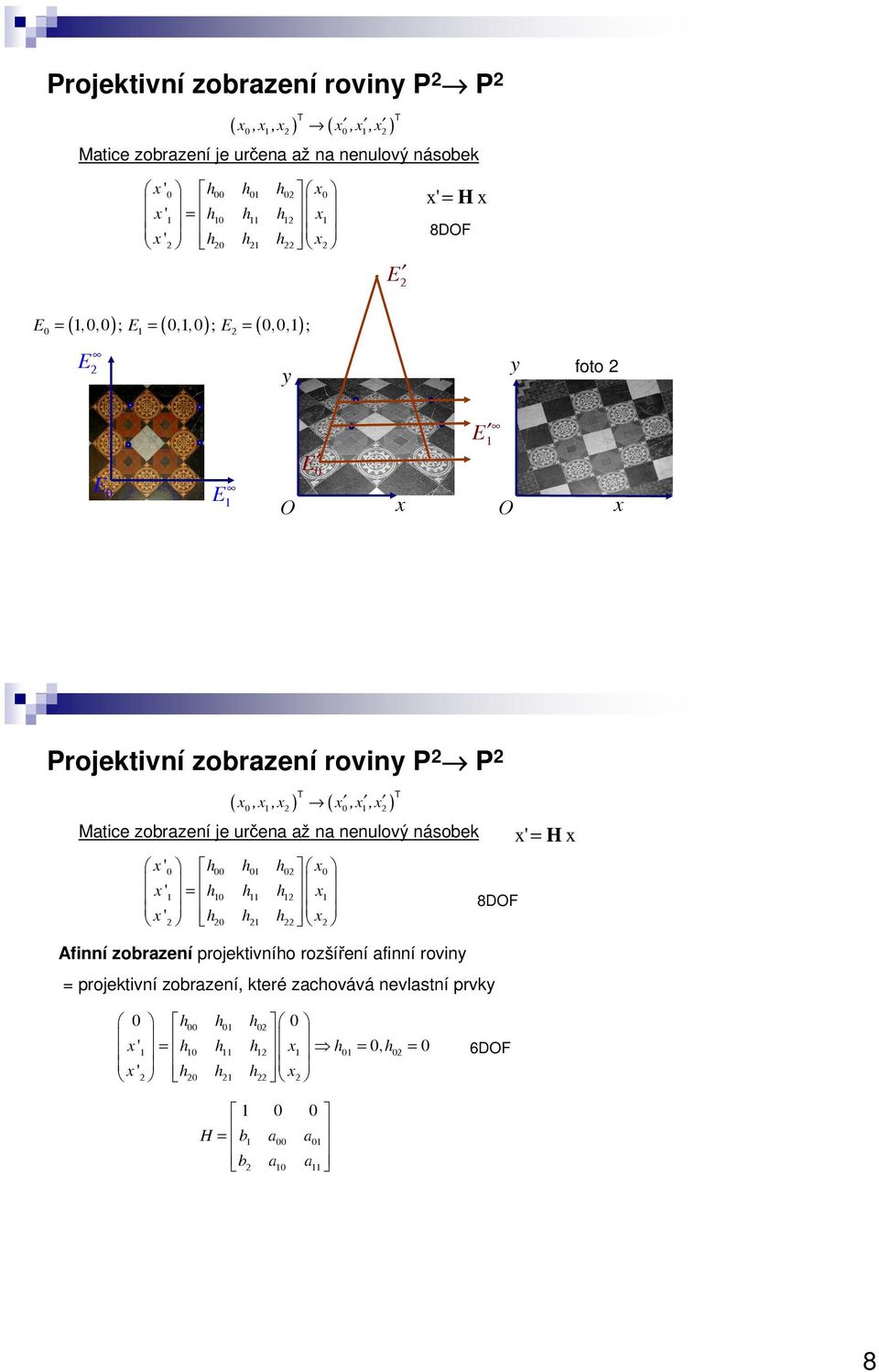
8 Projektivní zobrazení roviny P P ( x,x,x ) ( x,x,x ) Matice zobrazení je určena až na nenulový násobek x ' h h h x x ' h h h = x x ' h h h x E x' = H x 8DOF E =,, ; E =,, ; E =,, ; E y y foto E E O E x E O x Projektivní zobrazení roviny P P ( x,x,x ) ( x,x,x ) Matice zobrazení je určena až na nenulový násobek x ' h h h x x ' h h h = x x ' h h h x Afinní zobrazení projektivního rozšíření afinní roviny = projektivní zobrazení, které zachovává nevlastní prvky 8DOF x' = H x h h h x ' h h h = x h =, h = x ' h h h x 6DOF H b a a = b a a 8
9 Přehled projektivit v rovině Projektivity 8dof h h h h h h h h h incidence, kolinearita, průsečík tečna, dělící dvojpoměr Afinity 6dof b a a b a a Rovnoběžnost, dělící poměr, nevlastní přímka l b k cosα k sinα b k sinα k cosα úhly. Izotropické body b cosα sinα b sinα cosα délky, plochy. Podobnosti 4dof Shodnosti 3dof Afinní rektifikace l U p m q V V = m n n U = p q l = U V l = ( l, l, l ) E X = H P X E E l H P = l l 9
 E")
10 ransformace pohledu na afinní obraz ( x,x,x ) ( x,x,x ) ( x,x,x ) X ' = H X P X = H X = H H X P P P Projektivity v prostoru Projektivity 5dof t b A Incidence (průsečíky, tečna) Afinity dof t A Rovnoběžnost, dělící poměr Nevlastní rovinaπ Podobnosti 7dof Shodnosti 6dof t kr t R Absolutní kuželos.ω Objem

11 Rekonstrukce snímku Kalibrace kamery W, x, y, z W W W W C C, x, y, z i i i c c c I, x, y, R, W t C I Vztah obecné báze W a báze objektivu kamety C vnější parametry kamery(extrinsic) Vztah kamerových souřadnic v bázi C a souřadnic obrázku v bázi I vnitřní parametry kamery (intrinsic)

12 Geometrie kamery (basic pinhole camera) H H Vztah mezi pixelovými souřadnicemi snímku a souřadnicemi pozorovaného objektu v pevně daném repéru projekční matice kamery. Prostorová scéna je ze středu promítána na průmětnu Předpokládejme, že zobrazení mezi P 3 a P je lineární

13 Kalibrace kamery středové promítání 3 x E E :, (, x, y, z), f, f z 3 x = x ; y = x ; z = x x x x 3 P P X X : x x x 3 x x,,,, f, f x x x x x 3 3 ( x, x, x, x ) ( x, fx, fx ) 3 3 y z f H (,, ) 3 X = P X = P x x x persp persp P persp = f = Ppersp f Sloupce P persp jsou obrazy báze C = e e e 3 = = = (,,, ); (,,, ); (,,, ); (,,, ); P persp Středové a rovnoběžné promítání 3
; (,,, ); (,,, ); (,,, ); P persp Středové a rovnoběžné")
14 X = P X P persp persp = f f f H Centrální rovina x 3 = se zobrazí do nevlastní přímky x = Souřadnicová rovina x = se zobrazí do osy x =. Souřadnicová rovina x = se zobrazí do osy x =. Matice vnitřní kalibrace kamery Kint = x mx s = x mx b y m y m y y b = s m x arctan(/s) Matice kalibrace kamery, projekční matice 3 P P : X X t R = = int persp X P X P K P Pint = KintP persp = x mx b f = mx f bf x = K y m f m f y y y [ ] Matice kalibrace K K = KintPperp K P = K = mx f bf x = K t R t R t R my f y [ ] [ ] [ ] [ ; ] P = K t R = Kt KR 4

15 Projekční matice Sloupce matice zobrazení jsou obrazy báze O W =(,,,), e =(,,,), e =(,,,), e 3 =(,,,) -První sloupec je obraz počátku O W, další sloupce jsou úběžníky souřadnicových os x W, y W, z W Střed kamery je jednodimenzionální prostor, který se zobrazí na nulový vektor, tj PC=o prvnířádek tvoří koeficienty obecné rovnice centrální roviny, druhý a třetířádek určují koeficienty obecné rovnice promítacích rovin jejichž body se zobrazí do os x,y p p p3 p4 P = [ Kt KR] = p p p3 p4 p3 p3 p33 p3 4 p p p3 p4 p X = p p p3 p4 = p p3 p3 p33 p34 p3 Numerický odhad projekční matice P Direct Linear ransformation Předpokládejme, že zobrazení mezi P 3 a P je lineární X = PX p p p3 p4 P = [ Kt ] = p 3 4 = 3 p3 p3 p33 p 34 P P KR p p p P P má DoF, znalost dvojice bod průmět znamená rovnice - minimální řešení vyžaduje alespoň 5 ½ dvojic X PX = o 5
![rovnice promítacích rovin jejichž body se zobrazí do os x,y p p p3 p4 P = [ Kt KR] = p p p3 p4 p3 p3 p33 p3 4 p p p3 p4 p X = p p p3 p4 = p p3 p3 p33 p34 p3 Numerický odhad projekční matice P Direct](/docs-images/45/23379055/images/page_15.jpg "Linear ransformation Předpokládejme, že zobrazení mezi P 3 a P je lineární X = PX p p p3 p4 P = [ Kt ] = p 3 4 = 3 p3 p3 p33 p 34 P P KR p p p P P má DoF, znalost dvojice bod průmět znamená rovnice -")
16 DL X PX = o 3 x P X xp X xp X 3 X PX = x = + P X xp X xp X 3 x P X xp X xp X x X x X P (,,,) 3 x X x X (,,,) P (,,,) x X x X P = o Ap = ( ) min d X, PX P i 3 min Ap ; p = p i ˆ i Hlavní bod úběžník hloubkových přímek H Hlavní bod H = (, p, p, p ) 3 4 Centrální rovina Směrový vektor hloubkových přímek je kolmý k centrální rovině p p p3 p4 P = [ Kt KR] = p p p3 p4 p3 p3 p33 p3 4 H = P, p, p, p = KR p, p, p

17 Průmět bodu X = PX Projekční matice P=[Kt; KR] má v souřadném systému kamery tvar P=K[O;I]=P int Kalibrovaná kamera - Známe-li vnitřní parametry kamery - matice kalibrace K Pint = mx f bf x = K my f y [ ] Všechny body na promítacím paprsku se promítnou do jednoho průmětu [ ; ](, ) X = K t X = KX X = K X H X X Průmět bodu X = PX Obraz nevlastního bodu u = (, u) je nezávislý na translaci [ ] u = P ( u) = Kt KR ( u) = KR u Rekonstrukce bodů v prostoru promítací paprsek Bod na promítacím paprsku X = P X + + Pseudo-inverzní matice P = P PP ; PP = I + Promítací paprsek je dán směrem u=(, ū) a středem C H X X λ = λu + C X ( λ) - - u = KR u = KR X = λ + = ( λ ) KR - X - KR - Kt KR - X -Kt PC = o [ Kt; KR],C = o Kt + KR C = o C = KR Kt 7
![nezávislý na translaci [ ] u = P ( u) = Kt KR ( u) = KR u Rekonstrukce bodů v prostoru promítací paprsek Bod na promítacím paprsku X = P X + + Pseudo-inverzní matice P = P PP ; PP = I](/docs-images/45/23379055/images/page_17.jpg "+ Promítací paprsek je dán směrem u=(, ū) a středem C H X X λ = λu + C X ( λ) - - u = KR u = KR X = λ + = ( λ ) KR - X - KR - Kt KR - X -Kt PC = o [ Kt; KR],C = o Kt + KR C = o C = KR")
18 Úběžníky Směrové vektor promítacích paprsků Úhel mezi dvěma promítacími paprsky průmětů X, Y d d cosθ = = Úběžníky kolmých směrů [ ; ](, ) X = Kt KR X = KRX X = KR X (, ); ( ) (, ); d = d d = KR X d = d d = KR X X ( K K ) X - - X X ( d d )( d d ) ( X ( K K ) X )( X ( K K ) X ) X ( K K ) X = - - Projektivita nevlastní roviny a průmětny Body nevlastní roviny X = (, X ) X = [ Kt; KR] (, X ) = KRX Absolutní kuželosečka v nevlastní rovině x = ; x + x + x3 = X =, X ; X I X = Obraz absolutní kuželosečky ω KK = X = KRX X = KR X X = X KR Úhel mezi promítacími paprsky bodů X, X. X I X = X X X KR I KR X = X KRR K = = X KK - - X ( K K ) X X ωx cosθ = = ( X ( K K ) X )( X ( K K ) X ) ( X ωx )( X ωx ) 8
![nevlastní roviny X = (, X ) X = [ Kt; KR] (, X ) = KRX Absolutní kuželosečka v nevlastní rovině x = ; x + x + x3 = X =, X ; X I X = Obraz absolutní kuželosečky ω KK = X = KRX X =](/docs-images/45/23379055/images/page_18.jpg "KR X X = X KR Úhel mezi promítacími paprsky bodů X, X.")
19 Epipolární geometrie Dvojstředové promítání Rekonstrukce scény A a a f(a,b,c)= (a,b) A (a,b,c) (a,b,c) (a,b) c b b (rekonstrukce) (kalibrace) (transformace) c c 9
 (kalibrace)")
20 Promítací rovina bodu epipolární rovina X X C C Epipoláry

21 C, C středy promítání E, E epipóly X, X průměty bodu X e, e epipoláry bodu X epipolární rovina ε x Esenciální matice Matice kalibrace K, K jsou známy přejdeme k normalizovaným souřadnicím obrazu ˆ, ˆ X = K X X = K X [ ] [, ] X = P X = K O, I X, X = P X = K t R X X = K Xˆ, X = K Xˆ, ˆ Xˆ = t R X X = O I X Xˆ t RXˆ = Xˆ t R Xˆ = M E = Xˆ E Xˆ E = t R M t3 t t 3 M = t t t t Fundamentální a Esenciální matice Pro esenciální matici pohledů E platí: E = tm R Pokud uvažujeme matice kalibrace K K, pak vztah mezi průměty určuje tzv. fundamentální matice: X = K Xˆ, X = K Xˆ Xˆ E Xˆ = K X E K X = X K EK X F = = X F X F = K t RK M t3 t t 3 M = t t t t
22 Zobrazení průmětu na epipoláry = X F X = X e = X X F = X F X = X e Fundamentální matice F určuje zobrazení X e : e = FX X e : e = F X Hodnost h(f)= fundamentální matice má 7 DoF Epipóly E, E e = FX E e ( ) = E F X = E F = o e = F X e E = F X E = FE = o Samodružné body = X F X = X F X S F + F F F F = FS + FA; FS = ; FA =
23 Fundamentální matice Předpokládejme dva perspektivní průměty C C. Dvojice X, X je dvojicí vzájemně si odpovídajících si průmětů právě tehdy, když F, X FX = Pro dva pohledy je matice F určena jednoznačně a nezávisí na transformaci souřadnic. Jestliže F je fundamentální matice pro přechod (P,P ), potom F je fundamentální matice pro (P,P) Daná fundamentální matice určuje dvojici kamerových matic až na násobení projektivní maticí. Nechť F je fundamentální matice, P P, P P jsou páry projekčních matic, takové, že F je fundamentální matice obou párů. Pak existuje regulární matice H P = PH P = PH 8 bodový algoritmus pro určení matice F f f f =,, = f = f f f f f f f f f 3 i i i i i X F X ( x y ) f f f3 x i f3 f3 f33 y (,,,,,,,, ) i i i i i i i i i i i i ( ) x y x x x x y y y x y y f = Pro n dvojic odpovídajících si průmětů X a X dostáváme homogenní soustavu n lineárních rovnic. x y x x x x y y y x y y x y x x x x y y y x y y f = n n n n n n n n n n n n x y x x x x y y y x y y min 9 f R Af A f je vlastní vektor matice A A, příslušný k λ. min Af = o 3
24 Vlastnosti esenciální matice Esenciální matice má 5 DoF E (3x3) je esenciální maticí, právě tehdy když jsou dvě singulární čísla shodná a třetí sing. číslo je nula: Důkaz: Uvažujme ortogonální matici W a antisymetrickou matici Z=diag(,,)W W = ; Z = Každá antisymetrická matice M může být rozložena M =kuzu, kde U je ortogonální. = ku diag(,,) WU M E = R=Udiag(,,)WU R M E = t R M t3 t t 3 M = t t t t Sestrojení esenciální matice E Sestrojíme-li pro libovolnou matici F(3x3) rozklad pak matice { σ σ σ } SVD: F = U diag,, V ; U, V O 3, R 3 σ + σ E = U diag { σ, σ,} V ; σ = je esenciální matice s minimální Frobeniovou vzdáleností od F. E je určena až na násobek normalizujeme σ= t = E = t diag,, ; M R = U W U R W = O 3, R ; U O 3, R { } { } { } E = U diag,, V R = UW V, t = U diag,, W U t = U M 4
25 Konstrukce projekčních matic z esenciální matice E { } Pro danou esenciální matici E = U diag,, V a pro volbu prvního kamerového systému P = [, I] existují 4 možné volby projekční matice P. P = ± u3 UWV P = ± u3 UW V Nevýhody osmibodového algoritmu W = Esenciální matice má 5 volitelných parametrů ( x potřebujeme 8 bodů) Je možnéřešit jen pro případ t o. Detekované průměty bodů X, X musí odpovídat bodům v obecné poloze. 4 možnosti pro rekonstrukci E Jen jedno řešení kdy je scéna před oběma kamerami 5
26 Rekonstrukce objektu Kalibrovaná matice Kalibrované pohledy 8 bodovým algoritmem určíme F Z matic kalibrace určíme odhad esenciální matice ( K EK ) = Rozkladem určíme projekční matice Z odpovídajících si průmětů sestrojíme bod v prostoru Rekonstrukce objektu Pokud body X v prostoru transformujeme projektivitou H, ˆX = HX pak jsou projekční matice tvaru Pˆ = PH ; Pˆ = P H X = PX X i i = i - ( P ˆ i H)( H Xˆ ) 6
27 Rekonstrukce objektu Jestliže množina dvojic průmětů určuje fundamentální matici jednoznačně, potom může být 3D scéna zrekonstruována a každé dvě takové rekonstrukce jsou projektivně ekvivalentní. Projektivní rekonstrukce zjištění vlastností invariantních v grupě projektivit (dělicí dvojpoměr, incidence) Afinní rekonstrukce zjištění vlastností invariantních v grupě afinit (dělící poměr, rovnoběžnost) Metrická rekonstrukce zjištění vlastností invariantních v grupě podobností Afinní rekonstrukce určíme obraz nevlastní roviny π zrekonstruované scény a použijeme projektivní zobrazení, které ji zobrazí zpět na nevlastní rovinu x =. π π π π 3 H = 7
28 Afinní rekonstrukce Známe li kamerové matice afinní rekonstrukce, P =[t M ], P =[t M ], pak afinita mezi snímky je dána maticí Q=M M -. D: Obraz nevlastního bodu: X = (, X) X [ ] X [ ] = t M X = M X, = t M X = M X X = M M X Metrická rekonstrukce určíme obraz absolutní kuželosečky v nevlastní rovině ω zrekonstruované scény a použijeme projektivní zobrazení, které ji zobrazí zpět na absolutní kuželosečku. 3 x = ; x + x + x = X =, X ; X I X = ω = ( KK ) Předpokládejme, že je známý obraz absolutní kuželosečky a máme již scénu afinně zrekonstruovanou. Pak od afinní rekonstrukce můžeme přejít k metrické rekonstrukci 3D transformací. ; H = AA = M M A ( ω ) 8
29 Obraz absolutní kuželosečky ( KK ω = ) úběžníky vzájemně kolmých směrů v,v v ωv = úběžník v přímky kolmé k rovině dané úběžnicí l. Autokalibrace z více snímků. Je-li sestrojen dostatečný počet snímků stejným fotoaparátem (pohyblivá kamera) l =ωv ω = H ωh - - Rekonstrukce scény Známé parametry Rekonstrukce Páry odpovídajících si bodů F Projektivní Obraz roviny v nekonečnu F,H Afinní IAC, kalibrační matice F,H ω,ω Metrická 9
1 Připomenutí vybraných pojmů
 1 Připomenutí vybraných pojmů 1.1 Grupa Definice 1 ((Komutativní) grupa). Grupou (M, ) rozumíme množinu M spolu s operací na M, která má tyto vlastnosti: i) x, y M; x y M, Operace je neomezeně definovaná
1 Připomenutí vybraných pojmů 1.1 Grupa Definice 1 ((Komutativní) grupa). Grupou (M, ) rozumíme množinu M spolu s operací na M, která má tyto vlastnosti: i) x, y M; x y M, Operace je neomezeně definovaná
Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe.
 4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
4 Afinita Afinita je stručný název pro afinní transformaci prostoru, tj.vzájemně jednoznačné afinní zobrazení bodového prostoru A n na sebe. Poznámka. Vzájemně jednoznačným zobrazením rozumíme zobrazení,
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
Michal Zamboj. December 23, 2016
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
7 Analytické vyjádření shodnosti
 7 Analytické vyjádření shodnosti 7.1 Analytická vyjádření shodných zobrazení v E 2 Osová souměrnost Osová souměrnost O(o) podle osy o s obecnou rovnicí o : ax + by + c =0: x = x 2a (ax + by + c) a 2 +
7 Analytické vyjádření shodnosti 7.1 Analytická vyjádření shodných zobrazení v E 2 Osová souměrnost Osová souměrnost O(o) podle osy o s obecnou rovnicí o : ax + by + c =0: x = x 2a (ax + by + c) a 2 +
Michal Zamboj. January 4, 2018
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Kreslení, rýsování. Zobrazení A B. Promítání E 3 E 2
 Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Kreslení, rýsování Zobrazení A B Promítání E 3 E 2 1 Promítání lineární 1. Obrazem bodu je bod 2. Obrazem přímky je přímka (nebo bod) 3. Obrazem roviny je rovina (nebo přímka) Nelineární perspektivy: válcová...
Projektivní geometrie. Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni
 Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
Projektivní geometrie dvou pohledů. Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni
 Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie dvou pohledů Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového
Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie dvou pohledů Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového
Projektivní prostor a projektivní zobrazení
 Kapitola 4 Projektivní prostor a projektivní zobrazení 4.1 Projektivní rozšíření eukleidovského prostoru Vlastnost býti incidentní v eukleidovském prostoru E 3 vykazuje nedostatek symetrie zatímco např.
Kapitola 4 Projektivní prostor a projektivní zobrazení 4.1 Projektivní rozšíření eukleidovského prostoru Vlastnost býti incidentní v eukleidovském prostoru E 3 vykazuje nedostatek symetrie zatímco např.
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
11 Vzdálenost podprostorů
 11 Vzdálenost podprostorů 11.1 Vzdálenost bodů Eukleidovský bodový prostor E n = afinní bodový prostor, na jehož zaměření je definován skalární součin. (Pech:AGLÚ/str.126) Definováním skalárního součinu
11 Vzdálenost podprostorů 11.1 Vzdálenost bodů Eukleidovský bodový prostor E n = afinní bodový prostor, na jehož zaměření je definován skalární součin. (Pech:AGLÚ/str.126) Definováním skalárního součinu
19 Eukleidovský bodový prostor
 19 Eukleidovský bodový prostor Eukleidovským bodovým prostorem rozumíme afinní bodový prostor, na jehož zaměření je definován skalární součin. Víme, že pomocí skalárního součinu jsou definovány pojmy norma
19 Eukleidovský bodový prostor Eukleidovským bodovým prostorem rozumíme afinní bodový prostor, na jehož zaměření je definován skalární součin. Víme, že pomocí skalárního součinu jsou definovány pojmy norma
6 Samodružné body a směry afinity
 6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK
 Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK Obsah 1 KOMPLEXNÍ ROZŠÍŘENÍ PROSTORU 7 1 Komplexní rozšíření vektorového prostoru........... 7 Komplexní rozšíření reálného afinního
Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK Obsah 1 KOMPLEXNÍ ROZŠÍŘENÍ PROSTORU 7 1 Komplexní rozšíření vektorového prostoru........... 7 Komplexní rozšíření reálného afinního
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Variace na invarianci 2017 Kleinův Erlangenský program(lukáš Krump)
") Variace na invarianci 2017 Kleinův Erlangenský program(lukáš Krump) Uvažujeme různé geometrie v rovině. Z obvyklé euklidovské geometrie je dostaneme tak, že odebíráme některé pojmy a axiomy. Odebráním
Variace na invarianci 2017 Kleinův Erlangenský program(lukáš Krump) Uvažujeme různé geometrie v rovině. Z obvyklé euklidovské geometrie je dostaneme tak, že odebíráme některé pojmy a axiomy. Odebráním
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]
![MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]](/thumbs/58/41721403.jpg "MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]") MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
Analytická geometrie lineárních útvarů
 ) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
) Na přímce: a) Souřadnice bodu na přímce: Analtická geometrie lineárních útvarů Bod P nazýváme počátek - jeho souřadnice je P [0] Nalevo od počátku leží čísla záporná, napravo čísla kladná. Každý bod
Projektivní geometrie. Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni
 Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
Metody Počítačového Vidění (MPV) - 3D počítačové vidění Projektivní geometrie Ing. Zdeněk Krňoul, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Metody Počítačového Vidění
KONSTRUKTIVNÍ GEOMETRIE
 KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
KONSTRUKTIVNÍ GEOMETRIE Přednáška Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny společného základu (reg. č. CZ.1.07/2.2.00/28.0021)
0. Pak existuje n tak, že Bµ APn
 Euklidovský prostor Základní pojmy: bod, přímka rovina Základní vztahy: bod leží na přímce přímka prochází bodem bod leží v rovině rovina prochází bodem bod inciduje s přímkou přímka inciduje s bodem bod
Euklidovský prostor Základní pojmy: bod, přímka rovina Základní vztahy: bod leží na přímce přímka prochází bodem bod leží v rovině rovina prochází bodem bod inciduje s přímkou přímka inciduje s bodem bod
KMA/G2 Geometrie 2 9. až 11. cvičení
 KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.
![x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.](/thumbs/83/87395437.jpg "x 2 = a 2 + tv 2 tedy (a 1, a 2 ) T + [(v 1, v 2 )] T A + V Příklad. U = R n neprázdná množina řešení soustavy Ax = b.") 1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
1. Afinní podprostory 1.1. Motivace. Uvažujme R 3. Jeho všechny vektorové podprostory jsou počátek, přímky a roviny procházející počátkem a celé R 3. Chceme-li v R 3 dělat geometrii potřebujeme i jiné
Projektivní prostor a projektivní zobrazení
 Kapitola 4 Projektivní prostor a projektivní zobrazení 4.1 Projektivní rozšíření eukleidovského prostoru Vlastnost býti incidentní vykazuje v eukleidovském prostoru E 3 nedostatek symetrie zatímco např.
Kapitola 4 Projektivní prostor a projektivní zobrazení 4.1 Projektivní rozšíření eukleidovského prostoru Vlastnost býti incidentní vykazuje v eukleidovském prostoru E 3 nedostatek symetrie zatímco např.
Matematika I, část I Vzájemná poloha lineárních útvarů v E 3
 3.6. Vzájemná poloha lineárních útvarů v E 3 Výklad A. Vzájemná poloha dvou přímek Uvažujme v E 3 přímky p, q: p: X = A + ru q: X = B + sv a hledejme jejich společné body, tj. hledejme takové hodnoty parametrů
3.6. Vzájemná poloha lineárních útvarů v E 3 Výklad A. Vzájemná poloha dvou přímek Uvažujme v E 3 přímky p, q: p: X = A + ru q: X = B + sv a hledejme jejich společné body, tj. hledejme takové hodnoty parametrů
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
5 Pappova věta a její důsledky
 5 Pappova věta a její důsledky Pappos z Alexandrie (?90?350), řecký matematik a astronom. Pod označením Pappova věta je uváděno více vět. Proto je třeba uvést, o jaké z těchto vět hovoříme. Zde se budeme
5 Pappova věta a její důsledky Pappos z Alexandrie (?90?350), řecký matematik a astronom. Pod označením Pappova věta je uváděno více vět. Proto je třeba uvést, o jaké z těchto vět hovoříme. Zde se budeme
Variace na invarianci 2018 Kleinův Erlangenský program(lukáš Krump)
") Variace na invarianci 2018 Kleinův Erlangenský program(lukáš Krump) V tomto semináři rozvedeme následují tezi, kterou přinesl Felix Klein ve svém Erlangenském programu(1872): V rovině existují různé geometrie.
Variace na invarianci 2018 Kleinův Erlangenský program(lukáš Krump) V tomto semináři rozvedeme následují tezi, kterou přinesl Felix Klein ve svém Erlangenském programu(1872): V rovině existují různé geometrie.
transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]
![transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]](/thumbs/88/115112143.jpg "transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím [1]") [1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
[1] Afinní transformace je posunutí plus lineární transformace má svou matici vzhledem k homogenním souřadnicím využití například v počítačové grafice Evropský sociální fond Praha & EU. Investujeme do
1 Soustavy lineárních rovnic
 1 Soustavy lineárních rovnic 1.1 Základní pojmy Budeme uvažovat soustavu m lineárních rovnic o n neznámých s koeficienty z tělesa T (potom hovoříme o soustavě m lineárních rovnic o n neznámých nad tělesem
1 Soustavy lineárních rovnic 1.1 Základní pojmy Budeme uvažovat soustavu m lineárních rovnic o n neznámých s koeficienty z tělesa T (potom hovoříme o soustavě m lineárních rovnic o n neznámých nad tělesem
Syntetická geometrie I
 Shodnost Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Definice (Vzdálenost) Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB
Shodnost Pedagogická fakulta 2018 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Definice (Vzdálenost) Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB
Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr
 Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
Geometrické transformace v prostoru Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace stejný přístup jako ve 2D shodné transformace (shodnosti,
8 Podobná (ekviformní) zobrazení v rovině
 zobrazení v rovině") Typeset by LATEX2ε 1 8 Podobná (ekviformní) zobrazení v rovině 8.1 Stejnolehlost (homotetie) v rovině Definice 8.1.1. Nechť jsou dány 3 různé kolineární body A, B, C. Dělicím poměrem λ = (ABC) rozumíme
Typeset by LATEX2ε 1 8 Podobná (ekviformní) zobrazení v rovině 8.1 Stejnolehlost (homotetie) v rovině Definice 8.1.1. Nechť jsou dány 3 různé kolineární body A, B, C. Dělicím poměrem λ = (ABC) rozumíme
Syntetická geometrie I
 Shodnost Pedagogická fakulta 2016 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB = BA pozitivně definitní
Shodnost Pedagogická fakulta 2016 www.karlin.mff.cuni.cz/~zamboj/ Vzdálenost dvou bodů Necht A, B, C ρ. Vzdálenost dvou bodů A, B v rovině je číslo AB a platí AB 0 AB = 0 A = B AB = BA pozitivně definitní
RELIÉF. Reliéf bodu. Pro bod ležící na s splynou přímky H A 2 a SA a reliéf není tímto určen.
 RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
RELIÉF Lineární (plošná) perspektiva ne vždy vyhovuje pro zobrazování daných předmětů. Například obraz, namalovaný s osvětlením zleva a umístěný tak, že je osvětlený zprava, se v tomto pohledu "nemodeluje",
Lineární zobrazení. 1. A(x y) = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)
 = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)") 4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
6 Lineární geometrie. 6.1 Lineární variety
 6 Lineární geometrie Motivace. Pojem lineární varieta, který budeme v této kapitole studovat z nejrůznějších úhlů pohledu, není žádnou umělou konstrukcí. Příkladem lineární variety je totiž množina řešení
6 Lineární geometrie Motivace. Pojem lineární varieta, který budeme v této kapitole studovat z nejrůznějších úhlů pohledu, není žádnou umělou konstrukcí. Příkladem lineární variety je totiž množina řešení
Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK
 Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK Brno, 017 Předmluva Text pokrývá látku, která je přednášena v učitelském studiu matematiky v předmětu M5510 "Teorie kuželoseček a kvadrik".
Josef Janyška Anna Sekaninová ANALYTICKÁ TEORIE KUŽELOSEČEK A KVADRIK Brno, 017 Předmluva Text pokrývá látku, která je přednášena v učitelském studiu matematiky v předmětu M5510 "Teorie kuželoseček a kvadrik".
Matematika B101MA1, B101MA2
 Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY
 3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
3. ÚVOD DO ANALYTICKÉ GEOMETRIE 3.1. ANALYTICKÁ GEOMETRIE PŘÍMKY V této kapitole se dozvíte: jak popsat bod v rovině a v prostoru; vzorec na výpočet vzdálenosti dvou bodů; základní tvary rovnice přímky
Euklidovské prostory. Euklidovský prostor dimense 3
 Euklidovské prostory Euklides nebo také Eukleides byl řecký matematik žijící kolem roku 300 př.n.l. Jeho nejznámějším dílem jsou Základy, ve kterých vybudoval geometrii způsobem definice- věta- důkaz.
Euklidovské prostory Euklides nebo také Eukleides byl řecký matematik žijící kolem roku 300 př.n.l. Jeho nejznámějším dílem jsou Základy, ve kterých vybudoval geometrii způsobem definice- věta- důkaz.
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
6. Vektorový počet Studijní text. 6. Vektorový počet
 6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
6. Vektorový počet Budeme se pohybovat v prostoru R n, což je kartézská mocnina množiny reálných čísel R; R n = R R. Obvykle nám bude stačit omezení na případy n = 1, 2, 3; nicméně teorie je platná obecně.
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vlastní číslo, vektor
 [1] Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost
[1] Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost
Úvod do lineární algebry
 Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
Matice. Předpokládejme, že A = (a ij ) je matice typu m n: diagonálou jsou rovny nule.
 je matice typu m n: diagonálou jsou rovny nule.") Matice Definice. Maticí typu m n nazýváme obdélníkové pole, tvořené z m n reálných čísel (tzv. prvků matice), zapsaných v m řádcích a n sloupcích. Značíme např. A = (a ij ), kde i = 1,..., m, j = 1,...,
Matice Definice. Maticí typu m n nazýváme obdélníkové pole, tvořené z m n reálných čísel (tzv. prvků matice), zapsaných v m řádcích a n sloupcích. Značíme např. A = (a ij ), kde i = 1,..., m, j = 1,...,
Vektorový prostor. Př.1. R 2 ; R 3 ; R n Dvě operace v R n : u + v = (u 1 + v 1,...u n + v n ), V (E 3 )...množina vektorů v E 3,
, V (E 3 )...množina vektorů v E 3,") Vektorový prostor Příklady: Př.1. R 2 ; R 3 ; R n...aritmetický n-rozměrný prostor Dvě operace v R n : součet vektorů u = (u 1,...u n ) a v = (v 1,...v n ) je vektor u + v = (u 1 + v 1,...u n + v n ),
Vektorový prostor Příklady: Př.1. R 2 ; R 3 ; R n...aritmetický n-rozměrný prostor Dvě operace v R n : součet vektorů u = (u 1,...u n ) a v = (v 1,...v n ) je vektor u + v = (u 1 + v 1,...u n + v n ),
Matematika (CŽV Kadaň) aneb Úvod do lineární algebry Matice a soustavy rovnic
 aneb Úvod do lineární algebry Matice a soustavy rovnic") Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
3 Projektivní rozšíření Ēn prostoru E n
 3 Projektivní rozšíření Ēn prostoru E n Projektivním rozšířením eukleidovského prostoru E n rozumíme jeho doplnění o nevlastní body. Výsledný prostor značíme Ēn. Takovéto rozšíření eukleidovského prostoru
3 Projektivní rozšíření Ēn prostoru E n Projektivním rozšířením eukleidovského prostoru E n rozumíme jeho doplnění o nevlastní body. Výsledný prostor značíme Ēn. Takovéto rozšíření eukleidovského prostoru
KMA/G2 GEOMETRIE 2 Pomocný učební text. Miroslav Lávička
 KMA/G2 GEOMETRIE 2 Pomocný učební text Miroslav Lávička Plzeň, únor 2006 KMA/G2 Geometrie 2 2 Předmluva Tento text vznikl jako pomocný učební materiál pro potřeby studentů Fakulty aplikovaných věd a Fakulty
KMA/G2 GEOMETRIE 2 Pomocný učební text Miroslav Lávička Plzeň, únor 2006 KMA/G2 Geometrie 2 2 Předmluva Tento text vznikl jako pomocný učební materiál pro potřeby studentů Fakulty aplikovaných věd a Fakulty
UNIVERZITA PALACKÉHO V OLOMOUCI
 UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA Katedra algebry a geometrie Afinní zobrazení v příkladech Bakalářská práce Vedoucí práce: RNDr. Lenka Juklová, Ph.D. Rok odevzdání: 2013 Vypracoval:
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA Katedra algebry a geometrie Afinní zobrazení v příkladech Bakalářská práce Vedoucí práce: RNDr. Lenka Juklová, Ph.D. Rok odevzdání: 2013 Vypracoval:
Vlastní čísla a vlastní vektory
 Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Princip a vlastnosti promítání. Konstruktivní geometrie a technické kresleni - L
 Vlastnosti promítání Úkolem konstruktivní geometrie je zobrazení trojrozměrných předmětů ve dvojrozměrné rovině. Vlastnosti promítání Úkolem konstruktivní geometrie je zobrazení trojrozměrných předmětů
Vlastnosti promítání Úkolem konstruktivní geometrie je zobrazení trojrozměrných předmětů ve dvojrozměrné rovině. Vlastnosti promítání Úkolem konstruktivní geometrie je zobrazení trojrozměrných předmětů
Podrobnější výklad tématu naleznete ve studijním textu, na který je odkaz v Moodle. Tam je téma
 Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
Kuželosečky a kvadriky - výpisky + příklady Postupně vznikající text k části předmětu Geometrie. Ve výpiscích naleznete výpisky z přednášky, poznámky, řešené příklady a příklady na procvičení. Podrobnější
Matematika I, část I. Rovnici (1) nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.
 nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.") 3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
Základy matematiky pro FEK
 Základy matematiky pro FEK 2. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 20 Co nás dneska čeká... Závislé a nezávislé
Základy matematiky pro FEK 2. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 20 Co nás dneska čeká... Závislé a nezávislé
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Analytická metoda aneb Využití vektorů v geometrii
 KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
1 Řešení soustav lineárních rovnic
 1 Řešení soustav lineárních rovnic 1.1 Lineární rovnice Lineární rovnicí o n neznámých x 1,x 2,..., x n s reálnými koeficienty rozumíme rovnici ve tvaru a 1 x 1 + a 2 x 2 +... + a n x n = b, (1) kde koeficienty
1 Řešení soustav lineárních rovnic 1.1 Lineární rovnice Lineární rovnicí o n neznámých x 1,x 2,..., x n s reálnými koeficienty rozumíme rovnici ve tvaru a 1 x 1 + a 2 x 2 +... + a n x n = b, (1) kde koeficienty
Mongeova projekce - úlohy polohy
 Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
Mongeova projekce - úlohy polohy Mgr. František Červenka VŠB-Technická univerzita Ostrava 16. 2. 2010 Mgr. František Červenka (VŠB-TUO) Mongeova projekce - úlohy polohy 16. 2. 2010 1 / 14 osnova 1 Mongeova
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
3 Projektivní prostor
 Projektivní prostor ÚM FSI VUT v Brně Studijní text Projektivní prostor. Základní pojmy Jedním z důležitých pojmů počítačové geometrie je pojem promítání. Promítáním rozumíme zobrazení euklidovského prostoru
Projektivní prostor ÚM FSI VUT v Brně Studijní text Projektivní prostor. Základní pojmy Jedním z důležitých pojmů počítačové geometrie je pojem promítání. Promítáním rozumíme zobrazení euklidovského prostoru
GEOMETRICKÁ ZOBRAZENÍ. Josef Janyška
 GEOMETRICKÁ ZOBRAZENÍ Josef Janyška 21. února 2019 Obsah 1 LINEÁRNÍ ZOBRAZENÍ NA VEKTOROVÝCH PROSTORECH 1 1.1 Lineární zobrazení vektorových prostorů.............. 1 1.2 Invariantní podprostory.......................
GEOMETRICKÁ ZOBRAZENÍ Josef Janyška 21. února 2019 Obsah 1 LINEÁRNÍ ZOBRAZENÍ NA VEKTOROVÝCH PROSTORECH 1 1.1 Lineární zobrazení vektorových prostorů.............. 1 1.2 Invariantní podprostory.......................
maticeteorie 1. Matice A je typu 2 4, matice B je typu 4 3. Jakých rozměrů musí být matice X, aby se dala provést
 Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr
 Geometrické transformace v rovině Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace shodné transformace (shodnosti, izometrie) převádějí objekt
Geometrické transformace v rovině Geometrické vidění světa KMA/GVS ak. rok 2013/2014 letní semestr Shodné transformace 1 Shodné transformace shodné transformace (shodnosti, izometrie) převádějí objekt
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
Rovnice přímky v prostoru
 Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
Rovnice přímky v prostoru Každá přímka v prostoru je jednoznačně zadána dvěma body. K vyjádření všech bodů přímky lze použít parametrické rovnice. Parametrická rovnice přímky p Pokud A, B jsou dva různé
MONGEOVO PROMÍTÁNÍ - 2. část
 MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
MONGEOVO PROMÍTÁNÍ - 2. část ZOBRAZENÍ KRUŽNICE Příklad: V rovině ρ zobrazte kružnici o středu S a poloměru r. kružnice ležící v obecné rovině se v obou průmětech zobrazuje jako elipsa poloměr kružnice
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
1. MONGEOVO PROMÍTÁNÍ
 Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
Mongeovo promítání 1 1. MONGEOVO PROMÍTÁNÍ 1.1 Základní pojmy V Mongeově promítání promítáme na dvě navzájem kolmé průmětny. Vodorovná průmětna se nazývá půdorysna a značí se, svislá průmětna se nazývá
Lineární algebra : Skalární součin a ortogonalita
 Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
1 Báze a dimenze vektorového prostoru 1
 1 Báze a dimenze vektorového prostoru 1 Báze a dimenze vektorového prostoru 1 2 Aritmetické vektorové prostory 7 3 Eukleidovské vektorové prostory 9 Levá vnější operace Definice 5.1 Necht A B. Levou vnější
1 Báze a dimenze vektorového prostoru 1 Báze a dimenze vektorového prostoru 1 2 Aritmetické vektorové prostory 7 3 Eukleidovské vektorové prostory 9 Levá vnější operace Definice 5.1 Necht A B. Levou vnější
DEFINICE Z LINEÁRNÍ ALGEBRY
 DEFINICE Z LINEÁRNÍ ALGEBRY Skripta Matematické metody pro statistiku a operační výzkum (Nešetřilová, H., Šařecová, P., 2009). 1. definice Vektorovým prostorem rozumíme neprázdnou množinu prvků V, na které
DEFINICE Z LINEÁRNÍ ALGEBRY Skripta Matematické metody pro statistiku a operační výzkum (Nešetřilová, H., Šařecová, P., 2009). 1. definice Vektorovým prostorem rozumíme neprázdnou množinu prvků V, na které
Lineární algebra : Skalární součin a ortogonalita
 Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 30. dubna 2014, 09:00 1 2 15.1 Prehilhertovy prostory Definice 1. Buď V LP nad
Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 30. dubna 2014, 09:00 1 2 15.1 Prehilhertovy prostory Definice 1. Buď V LP nad
V: Pro nulový prvek o lineárního prostoru L platí vlastnosti:
 Zpracoval: hypspave@fel.cvut.cz. Základní vlastnosti abstraktních lineárních prostorů. Lineární závislost, nezávislost, báze, souřadnice vzhledem k bázi, matice lineárního zobrazení vzhledem k bázím.skalární
Zpracoval: hypspave@fel.cvut.cz. Základní vlastnosti abstraktních lineárních prostorů. Lineární závislost, nezávislost, báze, souřadnice vzhledem k bázi, matice lineárního zobrazení vzhledem k bázím.skalární
Obrázek 34: Vznik středové kolineace
 6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
6 Středová kolineace Jak naznačuje Obr. 34, středová kolineace (se středem S), jako vzájemně jednoznačné zobrazení Ē 2 na sebe, je výsledkem středového průmětu (se středem S ) středového promítání (se
MONGEOVO PROMÍTÁNÍ. bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po dlouhou dobu bylo vojenským tajemstvím
 po dlouhou dobu bylo vojenským tajemstvím") část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
část 1. MONGEOVO PROMÍTÁNÍ kolmé promítání na dvě průmětny (půdorysna, nárysna), někdy se používá i třetí pomocná průmětna bokorysna bylo objeveno a rozvinuto francouzem Gaspardem Mongem (1746 1818) po
Linearní algebra příklady
 Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
Linearní algebra příklady 6. listopadu 008 9:56 Značení: E jednotková matice, E ij matice mající v pozici (i, j jedničku a jinak nuly. [...]... lineární obal dané soustavy vektorů. Popište pomocí maticového
Rovnice přímky. s = AB = B A. X A = t s tj. X = A + t s, kde t R. t je parametr. x = a 1 + ts 1 y = a 2 + ts 2 z = a 3 + ts 3. t R
 Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
Rovnice přímky Přímka p je určená dvěma různými body (A, B)(axiom) směrový vektor nenulový rovnoběžný (kolineární) s vektorem s = AB = B A pro libovolný bod X na přímce platí: X A = t s tj. Vektorová rovnice
[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}
![[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}](/thumbs/26/7692117.jpg "[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}") Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost s diagonální
Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost s diagonální
Základy maticového počtu Matice, determinant, definitnost
 Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
Základy maticového počtu Matice, determinant, definitnost Petr Liška Masarykova univerzita 18.9.2014 Matice a vektory Matice Matice typu m n je pravoúhlé (nebo obdélníkové) schéma, které má m řádků a n
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Geometrie pro počítačovou grafiku - PGR020
 Geometrie pro počítačovou grafiku - PGR020 Zbyněk Šír Matematický ústav UK Zbyněk Šír (MÚ UK) - Geometrie pro počítačovou grafiku - PGR020 1 / 18 O čem předmět bude Chceme podat teoretický základ nezbytný
Geometrie pro počítačovou grafiku - PGR020 Zbyněk Šír Matematický ústav UK Zbyněk Šír (MÚ UK) - Geometrie pro počítačovou grafiku - PGR020 1 / 18 O čem předmět bude Chceme podat teoretický základ nezbytný
Afinní zobrazení, jeho regularita a (totální) singularita. Asociovaný homomorfismus. Analytické
 singularita. Asociovaný homomorfismus. Analytické") Slezská univerzita v Opavě Matematický ústav v Opavě Na Rybníčku 1 746 01 Opava Tel. 553 684 661 ANALYTICKÁ GEOMETRIE Téma 3. Afinní zobrazení Opakování Dělicí poměr; Homomorfismus vektorových prostorů,
Slezská univerzita v Opavě Matematický ústav v Opavě Na Rybníčku 1 746 01 Opava Tel. 553 684 661 ANALYTICKÁ GEOMETRIE Téma 3. Afinní zobrazení Opakování Dělicí poměr; Homomorfismus vektorových prostorů,
2 Vektorové normy. Základy numerické matematiky - NMNM201. Definice 1 (Norma). Norma je funkcionál splňující pro libovolné vektory x a y a pro
. Norma je funkcionál splňující pro libovolné vektory x a y a pro") Cvičení 1 Základy numerické matematiky - NMNM201 1 Základní pojmy opakování Definice 1 (Norma). Norma je funkcionál splňující pro libovolné vektory x a y a pro libovolný skalár α C následující podmínky:
Cvičení 1 Základy numerické matematiky - NMNM201 1 Základní pojmy opakování Definice 1 (Norma). Norma je funkcionál splňující pro libovolné vektory x a y a pro libovolný skalár α C následující podmínky:
EUKLIDOVSKÉ PROSTORY
 EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
EUKLIDOVSKÉ PROSTORY Necht L je lineární vektorový prostor nad tělesem reálných čísel R. Zobrazení (.,.) : L L R splňující vlastnosti 1. (x, x) 0 x L, (x, x) = 0 x = 0, 2. (x, y) = (y, x) x, y L, 3. (λx,
MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]
![MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]](/thumbs/55/35543113.jpg "MONGEOVO PROMÍTÁNÍ. ZOBRAZENÍ BODU - sdružení průměten. ZOBRAZENÍ BODU - kartézské souřadnice A[3; 5; 4], B[-4; -6; 2]") ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
ZOBRAZENÍ BODU - sdružení průměten MONGEOVO PROMÍTÁNÍ π 1... půdorysna π 2... nárysna x... osa x (průsečnice průměten) sdružení průměten A 1... první průmět bodu A A 2... druhý průmět bodu A ZOBRAZENÍ
Mongeovo zobrazení. Osová afinita
 Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
Mongeovo zobrazení Osová afinita nechť je v prostoru dána průmětna π, obecná rovina ρ a v této rovině libovolný trojúhelník ABC, promítneme-li trojúhelník kolmo do průmětny π, dostaneme trojúhelník A
Kótované promítání. Úvod. Zobrazení bodu
 Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Úvod Kótované promítání Každá promítací metoda má z pohledu praxe určité výhody i nevýhody podle toho, co při jejím užití vyžadujeme. Protože u kótovaného promítání jde o zobrazení prostoru na jednu rovinu,
Úlohy nejmenších čtverců
 Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Shodná zobrazení. bodu B ležet na na zobrazené množině b. Proto otočíme kružnici b kolem
 Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Shodná zobrazení Otočení Příklad 1. Jsou dány tři různé soustředné kružnice a, b a c. Sestrojte rovnostranný trojúhelník ABC tak, aby A ležel na a, B ležel na b a C ležel na c. Řešení. Zvolíme vrchol A
Vzorce počítačové grafiky
 Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Vektorové operace součet vektorů rozdíl vektorů opačný vektor násobení vektoru skalárem úhel dvou vektorů velikost vektoru a vzdálenost dvojice bodů v rovině (v prostoru analogicky) u = B A= b a b a u
Deskriptivní geometrie 2
 Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání
Západočeská univerzita v Plzni Fakulta aplikovaných věd Katedra matematiky Deskriptivní geometrie 2 Pomocný učební text - díl II Světlana Tomiczková Plzeň 4. května 2011 verze 1.0 Obsah 1 Středové promítání