Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice (4.1)
|
|
|
- Martin Esterka
- před 6 lety
- Počet zobrazení:
Transkript
1 4 Řešení odezev dynamických systémů ve fázové rovině 4.1 Základní pojmy teorie fázové roviny Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice ( ) x+ F x, x = (4.1) kde F( x, x ) je obecně nelineární funkce výchylek x a rychlostí x. Přiřadíme-li ke každé výchylce x její rychlost (tj. derivaci) ve stejném čase, bude v tomto časovém okamžiku definován stav systému a také jeho zobrazení v tzv. fázové rovině ( x, x ). Polohu systému ve fázové rovině pak určuje tzv. zastupující bod. Zavedením nové proměnné y = můžeme přenést rovnici (4.1) na soustavu dt dvou rovnic prvého řádu nebo obecně dy = y, = F( x, y) (4.) dt dt dy = P( x, y), = Q( x, y) (4.3) dt dt což je nejjednodušší forma stavového prostoru. Pokud funkce P(x,y) a Q (x,y) neobsahují přímo čas t, mluvíme o systému autonomním, v opačném případě mluvíme o systému neautonomním. Ve fázové rovině ( x, x ) resp. ( xy, ) pohyb modelu reálného dynamického systému zobrazuje fázová křivka jejíž diferenciální rovnici získáme, vyloučíme-li z rovnic (4.3) čas t: dy (, ) (, ) Q x y = (4.4) P x y Na základě takto formulované fázové křivky lze fázový prostor rozložit na všechny možné trajektorie; takovu množinu možných fázových dřivek pak nazýváme fázovým portrétem dynamického systému. Rychlost, se kterou se po fázové křivce pohybuje zastupující bod, nazýváme fázovou rychlostí: dy v= + = P x y + Q x y dt dt (, ) (, ) (4.5)
2 Zrychlení je pak dáno vztahem x = = = x (4.6) dt dt Z rovnice (4.4) je zřejmé, že rovnice fázové trajektorie neobsahuje přímo čas. Máme-li ale vypočítat dobu pohybu zastupujícího bodu mezi dvěma body A a B, postupujeme takto: dt tb ta = dt = = x tb tb xb t A t A xa (4.7) Základní význam mají ty body roviny (resp. fázové křivky), ve kterých je fázová rychlost nulová. Tyto body nazýváme zvláštními nebo také singulárními body. Fyzikální význam singulárních bodů spočívá v tom, že reprezentují rovnovážné stavy dynamických systémů. Určení polohy těchto bodů ve fázové rovině vyplývá z rovnice (4.5); aby bylo v =, musí platit: P( x, y ) = a ( ) Q x, y = (4.8) Obr. 4.1 Ostatní body fázové roviny, ve kterých je v, nazýváme regulárními. Každým regulárním bodem může procházet pouze jedna fázová trajektorie. Fázové křivky respektují určitá pravidla: v horní polovině ( x > ) se zastupující bod pohybuje po libovolné fázové křivce zleva doprava, v dolní polovině ( x < ) naopak; v regulárních bodech, které leží na ose [x], protínají fázové křivky tuto osu pod pravými úhly; v regulárních bodech, které neleží na ose [x], nemůže mít fázová trajektorie tečnu rovnoběžnou s osou [x]; pokud jakákoliv spojitá fázová trajektorie protíná osu [x] ve dvou regulárních bodech, leží mezi těmito body nanejvýše jeden singulární bod; periodickým režimům pohybu systému odpovídají uzavřené fázové křivky, které neprocházejí zvláštními body. Doba pohybu zastupujícího bodu po takové křivce odpovídá periodě pohybu.
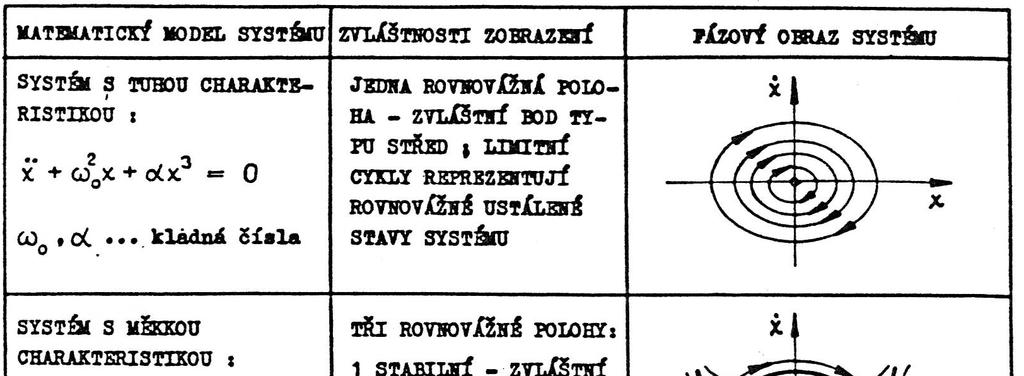
3 Struktura základních typů fázových křivek v blízkosti singulárních bodů, při rovnovážných stavech, je patrná z tabulky tab. 1. Rozeznáváme čtyři základní typy singulárních bodů: stabilní střed, nestabilní sedlo, a ohnisko a uzel, které mohou být stabilní i nestabilní. Izolované uzavřené fázové křivky, odpovídající rovnovážným stavům autonomních systémů, nazýváme limitní cykly. Působením vnější poruchy se zatupující bod vychýlí z dráhy podél limitního cyklu a pohybuje se po tzv. poruchové trajektorii. Směřují-li poruchové trajektorie z obou stran k limitnímu cyklu, je limitní cyklus stabilní (obr. 4.1a), směřuje-li poruchová trajektorie k limitnímu cyklu jen z jedné strany, je cyklus polostabilní (obr. 4.1b), vzdalují-li se poruchové trajektorie od limitního cyklu na obou stranách, je příslušný cyklus nestabilní (obr. 4.1c). Tabulka Izolované fázové trajektorie procházejí přes singulární body typu sedlo, se nazývají separatrixy viz tabulka tab., obr. D. Pohyb mechanického systému, odpovídající pohybu zastupujícího bodu po separatrixách je nestabilní a fyzikálně neralizovatelný. Důležité však je, že separatrixy rozdělují fázovou rovinu na oblasti počátečních podmínek, odpovídajících principálně rozdílným typům pohybů systémů (rezonanční resp. nerezonanční pohyby). Z obrazů fázových trajektorií v okolí zvláštních bodů tedy můžeme vyhodnotit nejen trajektor pohybu systému, ale objasnit i otázku stability rovnovážných stavů.
4 4. Příklady dynamické analýzy jednoduchých systémů Příklad A1: Analyzujte chování netlumeného harmonického oscilátoru ve fázové rovině. Rovnice harmonického oscilátoru, který je modelem dynamických systémů má tvar: x+ ω = (4.9) x lze ji nahradit soustavou rovnic typu (4.3), dosadíme-li za P( x, y ) = a Q( x, y) ω Odpovídající rovnice fázové trajektorie je = x. dy ω = y nyní přepíšeme tuto rovnici do tvaru, který lze snadno integrovat: ydy + ω = x a integrací dostaneme y + x = C C je integrační konstanta (4.1) ω, Obrazem této rovnice ve fázové rovině jsou elipsy, které představují jednotlivé trajektorie pro různé hodnoty konstanty C, jak je to patrno z tabulky tab., obr. A. Pro C = degeneruje elipsa (viz. ) v bod o souřadnicích x= y =. Protože právě v tomto bodě jsou splněny podmínky (4.8), jedná se o singulární bod. V tomto případě singulárním bodem neprochází žádná z fázových trajektorií, pouze jej obalují. Singulární bod tohoto typu nazýváme středem. Rychlost zastupujícího bodu vypočítáme podle vztahu (4.5): v= x + y = y +ω x 4 Je zřejmé, že nulovou bude tato rychlost jen v singulárním bodě. Můžeme tedy vyslovit následující závěr: analyzovaný systém může vykonávat stabilní periodické pohyby při libovolných počátečních podmínkách s výjimkou případu, kdy x= y =. Příklad A: Analyzujme chování harmonického oscilátoru s malým vazkým třením a nakreslete odpovídající fázovou trajektorii. V tomto případě analyzujeme rovnici x+ hx + ω x=, h ω Pomocí rovnic (4.3), kde P( xy, ) rovnici fázových trajektorií: = y a Q( x, y) = hy ω x, sestavíme diferenciální
5 dy hy + ω x = (4.11) y Pro usnadnění integrace rovnice (4.11) je vhodné zavést substituci y = zx. Pak lze psát dy = z + xdz a po dosazení těchto vztahů do (4.11) dostaneme: z + xdz hzx + ω x = zx Z tohoto vztahu můžeme vyjádřit x hzx+ ωx z x+ hzx+ ωx dz = z = zx zx respektive zdz = x z + hz+ ω Po integraci této rovnice získáme výraz h z+ h arctan h h x z + hz+ ω = Ce ω ω kde C je opět integrační konstanta. Umocníme-li tento výraz a přejdeme-li k původním souřadnicím x a y dostaneme ( ) ω h y+ xh arctan Ω Ωx y + hxy + x y + xh +Ω x = Ce (4.1) Kde Ω = ω h. Rovnici (4.1) přísluší opět rodina fázových křivek, které vyplňují fázovou rovinu. O jaký typ křivek jde, zjistíme snadno následujícím postupem. Položíme ( y+ xh) = ρ cosϕ a Ω x = ρ sinϕ. V souřadnicích ρ, φ (polárních) přejde rovnice (4.1) do tvaru h Ω ρ = Ce ϕ (4.13) ze kterého je zřejmé, že fázové křivky představují spirály, směřující k počátku x= y=, který se v tomto případě nazývá stabilním ohniskem, viz tabulka tab. (obr. B). Počátku ovšem nemůže být dosaženo v konečném čase. Rychlost zastupujícího bodu,
6 pohybujícího se po těchto fázových křivkách, je ( ω ) v= hy+ x + y. Pohyb systému v tomto případě směřuje asymptoticky k rovnovážnému bodu, ve kterém ustane. Příklad A3: Analyzujte chování harmonického oscilátoru se suchým třením a nakreslete odpovídající fázovou trajektorii. Uvážíme-li vliv suchého tření, lze pohybovou rovnici harmonického oscilátoru zapsat ve formě x + ω x= T( x), kde T( x) T, prox > = + T, prox < (4.14) Zavedeme novou proměnnou τ = ω a můžeme psát: t dτ x = = ω = ωx dτ dt dt x= ω x ( ) F x T pro x < T = kdet = + T pro x > ω (4.15) S ohledem na substituce (4.15) přejde pohybová rovnice (4.14) do tvaru ( ) x + F x + x= (4.16) A nyní již lze analyzovat stejně jako v přechozích úlohách. Položíme tedy P( xy, ) Q( x, y) = F( y) x, sestavíme diferenciální rovnici fázových trajektorií a upravíme ji do tvaru ( ) = ya dy F y + x = (4.17) y ( ( )) ydy + x + F y = (4.18)
7 Obr. 4. Obr. 4.3 Po integraci dostaneme rovnici kružnice (viz obr. 4.) se středem v bodě O souřadnicích x = F( y) a y =. Pro y x > je x T(bod O 1 ), pro y < je x + T (bod O ). Fázová křivka se tudíž bude skládat z částí kružnic opsaných kolem středů O 1 a O. Oblast mezi body O 1 a O představuje tzv. pásmo necitlivosti, fyzikálně charakterizované tím, že v tomto pásmu je síla pružná menší než síla třecí. To znamená, že dostane-li se systém do tohoto pásma (zastupující bod bude na čarkované části fázové křivky), jeho pohyb ustane, aniž by blo dosaženo počátku souřadnic (stabilního ohniska). Příklad A4: Sestavte tzv. fázový portrét pohybu matematického kyvadla, znázorněného na obr a) Pohyb v okolí nestabilní rovnovážné polohy Omezíme-li se na malé kmity kyvadla kolem nestabilní rovnovážné polohy (obr. 4,3a), má pohybová rovnice tvar ϕ ω sinϕ ϕ ω ϕ = (4.19) g kde ω = l
8 Po dosazení P( xy, ) = y a Q( x, y) ω = x, kde x ϕ, y x ϕ do (4.19) získáme opět diferenciální rovnici fázových trajektorií: dy ω x = (4.) y Po integraci této rovnice dostaneme rovnice hyperbol, zaplňujících fázovou rovinu: y ω x = C, C je integrační konstanta (4.1) Pro C = degeneruje rovnice (4.) v soustavu dvou přímek y = ± ωx, které prochází zvláštním bodem x= y =. Při C hyperboly zvláštním bodem neprocházejí, pouze se asymptoticky přibližují k přímkám y =± ω x, které nazýváme separatrixy. Pohyb po separatrixách je tedy fyzikálně neuskutečnitelný. Fázová rychlost zastupujícího bodu 4 bude rovna v= y + ω x a nulové hodnoty dosáhne pouze ve zvláštním bodě o souřadnicích x= y=, který se v tomto případě nazývá sedlem (viz tabulka tab., obr. D). Pohyb systému je v tomto případě nestabilní. b) Pohyb v okolí stabilní rovnovážné polohy Rovnice matematického kyvadla nyní je g ϕ + ω sinϕ =, ω = (4.) l Funkce P( xy, ) yqxy, (, ) ω sinx f( x) = = = a diferenciální rovnice fázových trajektorií po separaci proměnných je rovna ydy = f ( x) Po částečné integraci dostaneme: y ( ) f x C Ep C (4.3) = + = + kde E P je potenciální energie a C je integrační konstanta. Z rovnic (4.3), představující zákon zachování mechanické energie lze zjistit, že každé skupině počátečních podmínek ( t, x, y ) přísluší jediná hodnota C, ale každé jiné hodnotě C C odpovídá nekonečně mnoho hodnot x a y. Pro model popsaný rovnicí (4.), přejde rovnice (4.3) po integraci do tvaru ϕ = ω ϕ + cos C (4.4)
9 Funkce ω ϕ E ( ϕ) cos p má izolovaná minima v bodech ϕ =, ± π, ± 4 π,..., viz obr. 4.4a. Těmto minimům odpovídají ve fázové rovině ( ϕ, ϕ ) stabilní zvláštní body středy. Při ϕ =, ± π, ± 3 π,... má funkce E P (φ) izolovaná maxima, kterým odpovídají nestabilní zvláštní body sedla. Celkový obraz fázových křivek v rovině ( ϕ, ϕ ) je na obr. 4.4b. Obr. 4.4 Z rozboru rovnice (4.4) vyplývají zajímavé důsledky, týkající se možných pohybů modelu (4.1). Pro C < ω reálný pohyb neexistuje. Pro hodnoty ω < C < ω představují fázové trajektorie izolované uzavřené křivky, situované kolem stabilních singulárních bodů středů, které odpovídají možným periodickým pohybům. Při C = ω se fázové trajektorie protínají na ose [φ] v nestabilních singulárních bodech sedlech; víme již, že tyto křivky představují separatrixy. Pokud bude C > ω, odpovídá pohyb zastupujícího bodu po neuzavřených křivkách rotačnímu pohybu kyvadla v jednom směru. U složitějších dynamických modelů, především nelineárních, jsou fázové obrazy mnohem složitější, viz tabulka tab. 3; ovšem základní informace o charakteru pohybu zastupujícího bodu ve fázové rovině zůstávají v platnosti.
10 Tabulka 3
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Parametrická rovnice přímky v rovině
 Parametrická rovnice přímky v rovině Nechť je v kartézské soustavě souřadnic dána přímka AB. Nechť vektor u = B - A. Pak libovolný bod X[x; y] leží na přímce AB právě tehdy, když vektory u a X - A jsou
Parametrická rovnice přímky v rovině Nechť je v kartézské soustavě souřadnic dána přímka AB. Nechť vektor u = B - A. Pak libovolný bod X[x; y] leží na přímce AB právě tehdy, když vektory u a X - A jsou
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Cyklografie. Cyklický průmět bodu
 Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
Cyklografie Cyklografie je nelineární zobrazovací metoda - bodům v prostoru odpovídají kružnice v rovině a naopak. Úlohy v rovině pak převádíme na řešení prostorových úloh, např. pomocí cyklografie řešíme
1.13 Klasifikace kvadrik
 5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
8.4. Shrnutí ke kapitolám 7 a 8
 8.4. Shrnutí ke kapitolám 7 a 8 Shrnutí lekce Úvodní 7. kapitola přinesla informace o druzích řešení diferenciálních rovnic prvního řádu a stručné teoretické poznatky o podmínkách existence a jednoznačnosti
8.4. Shrnutí ke kapitolám 7 a 8 Shrnutí lekce Úvodní 7. kapitola přinesla informace o druzích řešení diferenciálních rovnic prvního řádu a stručné teoretické poznatky o podmínkách existence a jednoznačnosti
Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].
![Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].](/thumbs/91/104981778.jpg "Odvození středové rovnice kružnice se středem S [m; n] a o poloměru r. Bod X ležící na kružnici má souřadnice [x; y].") Konzultace č. 6: Rovnice kružnice, poloha přímky a kružnice Literatura: Matematika pro gymnázia: Analytická geometrie, kap. 5.1 a 5. Sbírka úloh z matematiky pro SOŠ a studijní obory SOU. část, kap. 6.1
Konzultace č. 6: Rovnice kružnice, poloha přímky a kružnice Literatura: Matematika pro gymnázia: Analytická geometrie, kap. 5.1 a 5. Sbírka úloh z matematiky pro SOŠ a studijní obory SOU. část, kap. 6.1
17 Kuželosečky a přímky
 17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
17 Kuželosečky a přímky 17.1 Poznámka: Polára bodu M ke kuželosečce Nechť X = [x 0,y 0 ] je bod. Zavedeme následující úpravy: x x 0 x y y 0 y xy (x 0 y + xy 0 )/ x (x 0 + x)/ y (y 0 + y)/ (x m) (x 0 m)(x
Příklady pro předmět Aplikovaná matematika (AMA) část 1
 část 1") Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
Příklady pro předmět plikovaná matematika (M) část 1 1. Lokální extrémy funkcí dvou a tří proměnných Nalezněte lokální extrémy funkcí: (a) f 1 : f 1 (x, y) = x 3 3x + y 2 + 2y (b) f 2 : f 2 (x, y) = 1
1. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v
 Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v") . a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
Q(y) dy = P(x) dx + C.
 dy = P(x) dx + C.") Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci)
 spojité parciální derivace v bodě a, pak lineární formu (funkci)") 2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
GE - Vyšší kvalita výuky CZ.1.07/1.5.00/
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma : Diferenciální a integrální
(0, y) 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení
 1.3. Základní pojmy a graf funkce. Nyní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení") .. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
.. Výklad Nní se již budeme zabývat pouze reálnými funkcemi reálné proměnné a proto budeme zobrazení M R, kde M R nazývat stručně funkce. Zopakujeme, že funkce je každé zobrazení f : M R, M R, které každému
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
KMA/G2 Geometrie 2 9. až 11. cvičení
 KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
KMA/G2 Geometrie 2 9. až 11. cvičení 1. Rozhodněte, zda kuželosečka k je regulární nebo singulární: a) k : x 2 0 + 2x 0x 1 x 0 x 2 + x 2 1 2x 1x 2 + x 2 2 = 0; b) k : x 2 0 + x2 1 + x2 2 + 2x 0x 1 = 0;
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Kapitola 5. Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které
 Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
Kapitola 5 Kuželosečky Seznámíme se ze základními vlastnostmi elipsy, hyperboly a paraboly, které společně s kružnicí jsou známy pod společným názvem kuželosečky. Říká se jim tak proto, že každou z nich
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ
 B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
B. MECHANICKÉ KMITÁNÍ A VLNĚNÍ I. MECHANICKÉ KMITÁNÍ 8.1 Kmitavý pohyb a) mechanické kmitání (kmitavý pohyb) pohyb, při kterém kmitající těleso zůstává stále v okolí určitého bodu tzv. rovnovážné polohy
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
Homogenní rovnice. Uvažujme rovnici. y = f(x, y), (4) kde
, (4) kde") Homogenní rovnice Uvažujme rovnici kde y = f(, y), (4) f(λ, λy) = f(, y), λ. Tato rovnice se nazývá homogenní rovnice 1. řádu. Ukážeme, že tuto rovnici lze převést substitucí na rovnici se separovanými
Homogenní rovnice Uvažujme rovnici kde y = f(, y), (4) f(λ, λy) = f(, y), λ. Tato rovnice se nazývá homogenní rovnice 1. řádu. Ukážeme, že tuto rovnici lze převést substitucí na rovnici se separovanými
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Otázku, kterými body prochází větev implicitní funkce řeší následující věta.
 1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
8.1. Separovatelné rovnice
 8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
8. Metody řešení diferenciálních rovnic 1. řádu Cíle V předchozí kapitole jsme poznali separovaný tvar diferenciální rovnice, který bezprostředně umožňuje nalézt řešení integrací. Eistuje široká skupina
Rozvinutelné plochy. tvoří jednoparametrickou soustavu rovin a tedy obaluje rozvinutelnou plochu Φ. Necht jsou
 Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
Rozvinutelné plochy Rozvinutelná plocha je každá přímková plocha, pro kterou existuje izometrické zobrazení do rov iny, tj. lze ji rozvinout do roviny. Dá se ukázat, že každá rozvinutelná plocha patří
1.7.4. Skládání kmitů
 .7.4. Skládání kmitů. Umět vysvětlit pojem superpozice.. Umět rozdělit různé typy skládání kmitů podle směru a frekvence. 3. Umět určit amplitudu a fázi výsledného kmitu. 4. Vysvětlit pojem fázor. 5. Znát
.7.4. Skládání kmitů. Umět vysvětlit pojem superpozice.. Umět rozdělit různé typy skládání kmitů podle směru a frekvence. 3. Umět určit amplitudu a fázi výsledného kmitu. 4. Vysvětlit pojem fázor. 5. Znát
Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky
 6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
9.7. Vybrané aplikace
 Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Cíle V rámci témat zaměřených na lineární diferenciální rovnice a soustavy druhého řádu (kapitoly 9.1 až 9.6) jsme dosud neuváděli žádné aplikace. Je jim společně věnována tato závěrečné kapitola, v níž
Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),
![Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),](/thumbs/62/47835194.jpg "Definice Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo. z f(x 0 + h,y 0 + k) f(x 0,y 0 ) = Ah + Bk + ρτ(h,k),") Definice 5.2.1. Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo má v tomto bodě totální diferenciál, jestliže je možné její přírůstek z na nějakém okolí bodu A vyjádřit jako
Definice 5.2.1. Řekneme, že funkce z = f(x,y) je v bodě A = [x 0,y 0 ] diferencovatelná, nebo má v tomto bodě totální diferenciál, jestliže je možné její přírůstek z na nějakém okolí bodu A vyjádřit jako
Transformujte diferenciální výraz x f x + y f do polárních souřadnic r a ϕ, které jsou definovány vztahy x = r cos ϕ a y = r sin ϕ.
 Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
1.8. Mechanické vlnění
 1.8. Mechanické vlnění 1. Umět vysvětlit princip vlnivého pohybu.. Umět srovnat a zároveň vysvětlit rozdíl mezi periodickým kmitavým pohybem jednoho bodu s periodickým vlnivým pohybem bodové řady. 3. Znát
1.8. Mechanické vlnění 1. Umět vysvětlit princip vlnivého pohybu.. Umět srovnat a zároveň vysvětlit rozdíl mezi periodickým kmitavým pohybem jednoho bodu s periodickým vlnivým pohybem bodové řady. 3. Znát
Obsah. Kmitavý pohyb. 2 Kinematika kmitavého pohybu 2. 4 Dynamika kmitavého pohybu 7. 5 Přeměny energie v mechanickém oscilátoru 9
 Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
Obsah 1 Kmitavý pohyb 1 Kinematika kmitavého pohybu 3 Skládání kmitů 6 4 Dynamika kmitavého pohybu 7 5 Přeměny energie v mechanickém oscilátoru 9 6 Nucené kmity. Rezonance 10 1 Kmitavý pohyb Typy pohybů
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C)
") VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
4.1 Řešení základních typů diferenciálních rovnic 1.řádu
 4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
4. Řešení základních tpů diferenciálních rovnic.řádu 4..4 Určete řešení z() Cauchov úloh pro rovnici + = 0 vhovující počáteční podmínce z =. Po separaci proměnných v rovnici dostaneme rovnici = d a po
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
Matematika I (KX001) Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0
 Užití derivace v geometrii, ve fyzice 3. října f (x 0 ) (x x 0) Je-li f (x 0 ) = 0, tečna: x = 3, normála: y = 0") Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Rovnice tečny a normály Geometrický význam derivace funkce f(x) v bodě x 0 : f (x 0 ) = k t k t je směrnice tečny v bodě [x 0, y 0 = f(x 0 )] Tečna je přímka t : y = k t x + q, tj y = f (x 0 ) x + q; pokud
Definice Tečna paraboly je přímka, která má s parabolou jediný společný bod,
 5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
5.4 Parabola Parabola je křivka, která vznikne řezem rotační kuželové plochy rovinou, jestliže odchylka roviny řezu od osy kuželové plochy je stejná jako odchylka povrchových přímek plochy a rovina řezu
Monotonie a lokální extrémy. Konvexnost, konkávnost a inflexní body. 266 I. Diferenciální počet funkcí jedné proměnné
 66 I. Diferenciální počet funkcí jedné proměnné I. 5. Vyšetřování průběhu funkce Monotonie a lokální etrémy Důsledek. Nechť má funkce f) konečnou derivaci na intervalu I. Je-li f ) > 0 pro každé I, pak
66 I. Diferenciální počet funkcí jedné proměnné I. 5. Vyšetřování průběhu funkce Monotonie a lokální etrémy Důsledek. Nechť má funkce f) konečnou derivaci na intervalu I. Je-li f ) > 0 pro každé I, pak
(test version, not revised) 9. prosince 2009
 9. prosince 2009") Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
Mechanické kmitání (test version, not revised) Petr Pošta pposta@karlin.mff.cuni.cz 9. prosince 2009 Obsah Kmitavý pohyb Kinematika kmitavého pohybu Skládání kmitů Dynamika kmitavého pohybu Přeměny energie
MECHANICKÉ KMITÁNÍ. Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A
 MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
MECHANICKÉ KMITÁNÍ Mgr. Jan Ptáčník - GJVJ - Fyzika - 3.A Kinematika kmitavého pohybu Mechanický oscilátor - volně kmitající zařízení Rovnovážná poloha Výchylka Kinematika kmitavého pohybu Veličiny charakterizující
[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2
![[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2](/thumbs/102/153207878.jpg "[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2") 4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU
 PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
Matematická analýza III.
 2. Parciální derivace Miroslav Hušek, Lucie Loukotová UJEP 2010 Parciální derivace jsou zobecněním derivace funkce jedné proměnné. V této kapitole poznáme jejich základní vlastnosti a využití. Co bychom
2. Parciální derivace Miroslav Hušek, Lucie Loukotová UJEP 2010 Parciální derivace jsou zobecněním derivace funkce jedné proměnné. V této kapitole poznáme jejich základní vlastnosti a využití. Co bychom
Substituce ve vícenásobném integrálu verze 1.1
 Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
X = A + tu. Obr x = a 1 + tu 1 y = a 2 + tu 2, t R, y = kx + q, k, q R (6.1)
") .6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
.6. Analtická geometrie lineárních a kvadratických útvarů v rovině. 6.1. V této kapitole budeme studovat geometrické úloh v rovině analtick, tj. lineární a kvadratické geometrické útvar vjádříme pomocí
Michal Zamboj. January 4, 2018
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj January 4, 018 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
ANALYTICKÁ GEOMETRIE V ROVINĚ
 ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
Rezonanční jevy na LC oscilátoru a závaží na pružině
 Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
Rezonanční jevy na LC oscilátoru a závaží na pružině M. Stejskal, K. Záhorová*, J. Řehák** Gymnázium Emila Holuba, Gymnázium J.K.Tyla*, SPŠ Hronov** Abstrakt Zkoumali jsme rezonanční frekvenci závaží na
6 Samodružné body a směry afinity
 6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
6 Samodružné body a směry afinity Samodružnými body a směry zobrazení rozumíme body a směry, které se v zobrazují samy na sebe. Například otočení R(S má jediný samodružný bod, střed S, anemá žádný samodružný
Necht na hmotný bod působí pouze pružinová síla F 1 = ky, k > 0. Podle druhého Newtonova zákona je pohyb bodu popsán diferenciální rovnicí
 Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
Počáteční problémy pro ODR2 1 Lineární oscilátor. Počáteční problémy pro ODR2 Uvažujme hmotný bod o hmotnosti m, na který působí síly F 1, F 2, F 3. Síla F 1 je přitom úměrná výchylce y z rovnovážné polohy
4. OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE
 FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
Michal Zamboj. December 23, 2016
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
pouze u některých typů rovnic a v tomto textu se jím nebudeme až na
 Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Definice globální minimum (absolutní minimum) v bodě A D f, jestliže X D f
 v bodě A D f, jestliže X D f") Výklad Globální extrémy mají stejný význam jako u funkcí jedné proměnné. Hledáme je bud na celém definičním oboru dané funkce, nebo na předem zadané podmnožině definičního oboru. Definice 6..1. Řekneme,
Výklad Globální extrémy mají stejný význam jako u funkcí jedné proměnné. Hledáme je bud na celém definičním oboru dané funkce, nebo na předem zadané podmnožině definičního oboru. Definice 6..1. Řekneme,
Kapitola 8: Dvojný integrál 1/26
 Kapitola 8: vojný integrál 1/26 vojný integrál - osnova kapitoly 2/26 dvojný integrál přes obdélník definice výpočet (Fubiniova věta pro obdélník) dvojný integrál přes standardní množinu definice výpočet
Kapitola 8: vojný integrál 1/26 vojný integrál - osnova kapitoly 2/26 dvojný integrál přes obdélník definice výpočet (Fubiniova věta pro obdélník) dvojný integrál přes standardní množinu definice výpočet
Extrémy funkce dvou proměnných
 Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Extrémy funkce dvou proměnných 1. Stanovte rozměry pravoúhlé vodní nádrže o objemu 32 m 3 tak, aby dno a stěny měly nejmenší povrch. Označme rozměry pravoúhlé nádrže x, y, z (viz obr.). ak objem této nádrže
Řešíme tedy soustavu dvou rovnic o dvou neznámých. 2a + b = 3, 6a + b = 27,
 Přijímací řízení 2015/16 Přírodovědecká fakulta Ostravská univerzita v Ostravě Navazující magisterské studium, obor Aplikovaná matematika (1. červen 2016) Příklad 1 Určete taková a, b R, aby funkce f()
Přijímací řízení 2015/16 Přírodovědecká fakulta Ostravská univerzita v Ostravě Navazující magisterské studium, obor Aplikovaná matematika (1. červen 2016) Příklad 1 Určete taková a, b R, aby funkce f()
4. Diferenciál a Taylorova věta
 4. Diferenciál a Taylorova věta Definice 4.1. Buď f : R n R, a Df. Řekneme, že f je diferencovatelná v bodě a, když h V n takový, že a + h Df platí f(a + h) f(a) gradf(a) h + h τ(h), kde lim τ(h) 0. Funkce
4. Diferenciál a Taylorova věta Definice 4.1. Buď f : R n R, a Df. Řekneme, že f je diferencovatelná v bodě a, když h V n takový, že a + h Df platí f(a + h) f(a) gradf(a) h + h τ(h), kde lim τ(h) 0. Funkce
Přetvořené ose nosníku říkáme ohybová čára. Je to rovinná křivka.
 OHYBOVÁ ČÁRA ZA PROSTÉHO OHYBU - rovinné průřez zůstávají po deformaci rovinnými, avšak natáčejí se. - při prostém ohbu hlavní centrální osa setrvačnosti všech průřezů leží v rovině vnějších sil, která
OHYBOVÁ ČÁRA ZA PROSTÉHO OHYBU - rovinné průřez zůstávají po deformaci rovinnými, avšak natáčejí se. - při prostém ohbu hlavní centrální osa setrvačnosti všech průřezů leží v rovině vnějších sil, která
5.3. Implicitní funkce a její derivace
 Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Funkce a základní pojmy popisující jejich chování
 a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
a základní pojmy ující jejich chování Pro zobrazení z reálných čísel do reálných čísel se používá termín reálná funkce reálné proměnné. 511 f bude v této části znamenat zobrazení nějaké neprázdné podmnožiny
Analytická geometrie kvadratických útvarů v rovině
 Analytická geometrie kvadratických útvarů v rovině V následujícím textu se budeme postupně zabývat kružnicí, elipsou, hyperbolou a parabolou, které souhrnně označujeme jako kuželosečky. Současně budeme
Analytická geometrie kvadratických útvarů v rovině V následujícím textu se budeme postupně zabývat kružnicí, elipsou, hyperbolou a parabolou, které souhrnně označujeme jako kuželosečky. Současně budeme
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Přijímací zkoušky z matematiky pro akademický rok 2018/19 NMgr. studium Učitelství matematiky ZŠ, SŠ
 Přijímací zkoušky z matematiky pro akademický rok 8/9 NMgr studium Učitelství matematiky ZŠ, SŠ Datum zkoušky: Varianta Registrační číslo uchazeče: Příklad 3 4 5 Celkem Body Ke každému příkladu uved te
Přijímací zkoušky z matematiky pro akademický rok 8/9 NMgr studium Učitelství matematiky ZŠ, SŠ Datum zkoušky: Varianta Registrační číslo uchazeče: Příklad 3 4 5 Celkem Body Ke každému příkladu uved te
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura:
 8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
8 Plochy - vytvoření, rozdělení, tečná rovina a normála. Šroubové plochy - přímkové, cyklické. Literatura: (1)Poláček, J., Doležal, M.: Základy deskriptivní a konstruktivní geometrie, díl 5, Křivky a plochy
Rovnice rovnováhy: ++ =0 x : =0 y : =0 =0,83
 Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Vypočítejte moment síly P = 4500 N k osám x, y, z, je-li a = 0,25 m, b = 0, 03 m, R = 0,06 m, β = 60. Nositelka síly P svírá s tečnou ke kružnici o poloměru R úhel α = 20.. α β P y Uvolnění: # y β! x Rovnice
Matematika I, část I. Rovnici (1) nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.
 nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.") 3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
Gymnázium, Brno, Elgartova 3
 Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma: Analytická geometrie
Gymnázium, Brno, Elgartova 3 GE - Vyšší kvalita výuky CZ.1.07/1.5.00/34.0925 IV/2 Inovace a zkvalitnění výuky směřující k rozvoji matematické gramotnosti žáků středních škol Téma: Analytická geometrie
Diferenciální počet 1 1. f(x) = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.
 = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.") Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
MATEMATIKA II - vybrané úlohy ze zkoušek (2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek (2015) doplněné o další úlohy 24. 2. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi (e-mail: Frantisek.Mraz@fs.cvut.cz
MATEMATIKA II - vybrané úlohy ze zkoušek (2015) doplněné o další úlohy 24. 2. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi (e-mail: Frantisek.Mraz@fs.cvut.cz
Projekt OPVK - CZ.1.07/1.1.00/ Matematika pro všechny. Univerzita Palackého v Olomouci
 Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: graf funkce, derivace funkce a její
Projekt OPVK - CZ.1.07/1.1.00/26.0047 Matematika pro všechny Univerzita Palackého v Olomouci Tematický okruh: Závislosti a funkční vztahy Gradovaný řetězec úloh Téma: graf funkce, derivace funkce a její
Derivace goniometrických funkcí
 Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
ITO. Semestrální projekt. Fakulta Informačních Technologií
 ITO Semestrální projekt Autor: Vojtěch Přikryl, xprikr28 Fakulta Informačních Technologií Vysoké Učení Technické v Brně Příklad 1 Stanovte napětí U R5 a proud I R5. Použijte metodu postupného zjednodušování
ITO Semestrální projekt Autor: Vojtěch Přikryl, xprikr28 Fakulta Informačních Technologií Vysoké Učení Technické v Brně Příklad 1 Stanovte napětí U R5 a proud I R5. Použijte metodu postupného zjednodušování
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
I. část - úvod. Iva Petríková
 Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Kmitání mechanických soustav I. část - úvod Iva Petríková Katedra mechaniky, pružnosti a pevnosti Osah Úvod, základní pojmy Počet stupňů volnosti Příklady kmitavého pohyu Periodický pohy Harmonický pohy,
Rychlost, zrychlení, tíhové zrychlení
 Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
Úloha č. 3 Rychlost, zrychlení, tíhové zrychlení Úkoly měření: 1. Sestavte nakloněnou rovinu a změřte její sklon.. Změřte závislost polohy tělesa na čase a stanovte jeho rychlost a zrychlení. 3. Určete
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
Pohyb tělesa po nakloněné rovině
 Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
Pohyb tělesa po nakloněné rovině Zadání 1 Pro vybrané těleso a materiál nakloněné roviny zjistěte závislost polohy tělesa na čase při jeho pohybu Výsledky vyneste do grafu a rozhodněte z něj, o jakou křivku
PŘÍKLADY K MATEMATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY. x 2. 3+y 2
 PŘÍKLADY K ATEATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY ZDENĚK ŠIBRAVA.. Dvojné integrály.. Vícenásobné intergrály Příklad.. Vypočítejme dvojný integrál x 3 + y da, kde =, 3,. Řešení: Funkce f(x, y) = x je na obdélníku
PŘÍKLADY K ATEATICE 3 - VÍCENÁSOBNÉ INTEGRÁLY ZDENĚK ŠIBRAVA.. Dvojné integrály.. Vícenásobné intergrály Příklad.. Vypočítejme dvojný integrál x 3 + y da, kde =, 3,. Řešení: Funkce f(x, y) = x je na obdélníku
MECHANICKÉ KMITÁNÍ POJMY K ZOPAKOVÁNÍ. Testové úlohy varianta A
 Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
Škola: Autor: DUM: Vzdělávací obor: Tematický okruh: Téma: Masarykovo gymnázium Vsetín Mgr. Jitka Novosadová MGV_F_SS_3S3_D19_Z_OPAK_KV_Mechanicke_kmitani_T Člověk a příroda Fyzika Mechanické kmitání Opakování
10. cvičení z Matematické analýzy 2
 . cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
. cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
Diferenciální rovnice
 Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Diferenciální rovnice Průvodce studiem Touto kapitolou se náplň základního kurzu bakalářské matematiky uzavírá. Je tomu tak mimo jiné proto, že jsou zde souhrnně využívány poznatky získané studiem předchozích
Nalezněte hladiny následujících funkcí. Pro které hodnoty C R jsou hladiny neprázdné
 . Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
. Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
37. PARABOLA V ANALYTICKÉ GEOMETRII
 37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
37.. Napiš rovnici paraboly, která má osu rovnoběžnou s osou y a prochází body A 0; 60, B 4; 8, C 8;36. 0m p60n 4m p8n 8m p36n m p pn 0 6 8 6 mm p pn 64 6 7 3 mm p pn 6 8m64 p 3 64 6m9 p Je-li osa rovnoběžná
10. Analytická geometrie kuželoseček 1 bod
 10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
10. Analytická geometrie kuželoseček 1 bod 10.1. Kružnice opsaná obdélníku ABCD, kde A[2, 3], C[8, 3], má rovnici a) x 2 10x + y 2 + 7 = 0, b) (x 3) 2 + (y 3) 2 = 36, c) x 2 + 10x + y 2 18 = 0, d) (x 10)
ŠROUBOVICE. 1) Šroubový pohyb. 2) Základní pojmy a konstrukce
 Šroubový pohyb. 2) Základní pojmy a konstrukce") 1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
1) Šroubový pohyb ŠROUBOVICE Šroubový pohyb vznikne složením dvou pohybů : otočení kolem dané osy o a posunutí ve směru této osy. Velikost posunutí je přitom přímo úměrná otočení. Konstantou této přímé
b) Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0
 Maximální velikost zrychlení automobilu, nemají-li kola prokluzovat, je a = f g. Automobil se bude rozjíždět po dobu t = v 0 fg = mfgv 0") Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Řešení úloh. kola 58. ročníku fyzikální olympiády. Kategorie A Autoři úloh: J. Thomas, 5, 6, 7), J. Jírů 2,, 4).a) Napíšeme si pohybové rovnice, ze kterých vyjádříme dobu jízdy a zrychlení automobilu A:
Derivace funkce. Přednáška MATEMATIKA č Jiří Neubauer
 Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Obyčejné diferenciální rovnice
 Obyčejné diferenciální rovnice Petra Schreiberová, Petr Volný Katedra matematiky a deskriptivní geometrie, FS Katedra matematiky, FAST Vysoká škola báňská Technická Univerzita Ostrava Ostrava 2019 OBSAH
Obyčejné diferenciální rovnice Petra Schreiberová, Petr Volný Katedra matematiky a deskriptivní geometrie, FS Katedra matematiky, FAST Vysoká škola báňská Technická Univerzita Ostrava Ostrava 2019 OBSAH
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII
 PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
PŘÍMKA A JEJÍ VYJÁDŘENÍ V ANALYTICKÉ GEOMETRII V úvodu analytické geometrie jsme vysvětlili, že její hlavní snahou je popsat geometrické útvary (body, vektory, přímky, kružnice,...) pomocí čísel nebo proměnných.
2. DVOJROZMĚRNÝ (DVOJNÝ) INTEGRÁL
 INTEGRÁL") . VOJROZMĚRNÝ (VOJNÝ) INTEGRÁL Úvodem připomenutí základních integračních vzorců, bez nichž se neobejdete: [.] d = C [.] d = + C n+ n [.] d = + C n + [4.] d = ln + C [5.] sin d = cos + C [6.] cos d = sin
. VOJROZMĚRNÝ (VOJNÝ) INTEGRÁL Úvodem připomenutí základních integračních vzorců, bez nichž se neobejdete: [.] d = C [.] d = + C n+ n [.] d = + C n + [4.] d = ln + C [5.] sin d = cos + C [6.] cos d = sin
Příklad 1 ŘEŠENÉ PŘÍKLADY Z M1A ČÁST 6
 Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly
Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly