NAVIGA NÍ SYSTÉMY V GEOGRAFICKÝCH PR ZKUMNÝCH AKCÍH NAVIGATION IN GIS SURWEYS
|
|
|
- Naděžda Krausová
- před 6 lety
- Počet zobrazení:
Transkript


1 VYSOKÉ UENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY FAKULTA INFORMANÍCH TECHNOLOGIÍ ÚSTAV INTELIGENTNÍCH SYSTÉM FACULTY OF INFORMATION TECHNOLOGY DEPARTMENT OF INTELLIGENT SYSTEMS NAVIGANÍ SYSTÉMY V GEOGRAFICKÝCH PRZKUMNÝCH AKCÍH NAVIGATION IN GIS SURWEYS DIPLOMOVÁ PRÁCE MASTER S THESIS AUTOR PRÁCE AUTHOR VEDOUCÍ PRÁCE SUPERVISOR BC. PAVEL POP ING. MARTIN HRUBÝ, PH.D. BRNO 29
2 Abstrakt Cílem projektu je návrh a implementace naviganího systému pro geografické przkumné akce. Systém musí být schopen pracovat globáln a ešit více typ naviganích úloh v návaznosti na dopravní prostedek, pomocí nhož je przkum provádna. Jedním z úkol je také zlepšení prbhu navigace odstranním chyb vznikajících nepesnostmi v zamení pozice a technickými omezeními GPS, jako je napíklad malá frekvence poskytovaných vstupních dat pro navádní. Problematika malé frekvence poskytovaných vstupních dat je ešena pomocí predikce pohybu, ímž je umožnno plynulé zobrazování výstupu uživateli. Protože není možné otestovat systém kompletn v reálném provozu, je vytvoen simulaní nástroj, který umožuje sledovat chování navigace ve všech situacích. Dokument obsahuje rozbor problému z hlediska geografie, definici problém orientace v prostoru a zpsob jejich matematických ešení a nástin implementace aplikace. Klíová slova GPS, Navigace, NMEA, Geodézie, C++, WGS84 Abstract The project aims to design and implementation of navigation in GIS surweys. The system must be able to operate globally and deal with several types of navigation tasks in relation to the means of transport by which the navigation is carried out. One of the tasks is also to improve the course of navigation errors resulting from the removal of inaccuracies in the focus position and technical limitations of GPS, such as low frequency of the input data for guidance. Problems of low frequency of the input data is dealt with through the prediction of movement, which enabled the smooth display output users. Because it is not possible to completely test the system in operation, it created a simulation tool that lets you track the behavior of navigation in all situations. The document contains an analysis of the problem in terms of geography, the definition of the problems of orientation in space and their mathematical solution and an outline of implementation. Keywords GPS, Navigation, NMEA, Geodesy, C++, WGS84.
3 Citace Pop Pavel: Naviganí systémy v geografických przkumných akcích. Brno, 29, diplomová práce, FIT VUT v Brn. 3
4 Naviganí systémy v geografických przkumných akcích Prohlášení Prohlašuji, že jsem tuto diplomovou práci vypracoval samostatn pod vedením Ing. Martina Hrubého Ph.D. Uvedl jsem všechny literární prameny a publikace, ze kterých jsem erpal. Jméno Píjmení Datum Podkování Chtl bych zde podkovat Ing. Martinu Hrubému, Ph.D. za pomoc a konzultace pi ešení diplomové práce. Dále bych chtl podkovat Ing. Martinu Adamcovi za pomoc kterou mi poskytl ohlednešení problém z oblasti geografie. Pavel Pop, 29. Tato práce vznikla jako školní dílo na Vysokém uení technickém v Brn, Fakult informaních technologií. Práce je chránna autorským zákonem a její užití bez udlení oprávnní autorem je nezákonné, s výjimkou zákonem definovaných pípad. 4
5 Obsah Obsah Úvod Rozbor problému a stanovení cíl Naviganí úlohy Prbh navigace Údaje o poloze GPS GPS pijíma NMEA Souadné systémy, zobrazení UTM WGS Návrh ešení funkcí navigace Typy bod Typy bod cest Typy bod pro navigaci Vytvoení cesty Polohy cesty Transformace souadnic Vytvoení jednoduché linie Vytvoení libovolné cesty Vytvoení pokrytí plochy Otáení Dosažení cíle Minutí cíle Urení smru k cíli Stejný kvadrant Každý z bod leží v jiném kvadrantu Speciální funkce Statická navigace Pitažení bodu k ideální cest Predikce pohybu Simulaní nástroj Stanovení maximální odchylky smru
6 5.2 Výpoet souadnic nové pozice Implementace Použité technologie Hlavní funkní prvky navigace, tídy Kroky pi navigaci, simulovaném provozu Predikce pohybu Testování Testování dílích ástí navigace Testování za pomoci simulaního nástroje Testování v reálných podmínkách Závr... 6 Literatura Pílohy
7 1 Úvod Satelitní navigace prochází za posledních nkolik let velkým rozmachem a proniká do mnoha oblastí lidské innosti. V geografii je využívána již dlouho, ale práv díky jejímu velkému rozšíení jsou dnes pijímae signálu cenov dostupnjší a lze je proto využívat i pro menší przkumné akce. Obecn jsou na przkum terénu kladeny rzné požadavky, se kterými se musí naviganí systém umt vyrovnat a to jak z pohledu navigace rzných dopravních prostedk, navigace v rzných terénech, tak z pohledu samotného zpsobu navigace. Cílem práce je vytvoení naviganího systému sloužícího pro przkum v geografických akcích založeného na bžn dostupném pijímai GPS. Jedná se o navigaci voln se pohybujícího objektu v prostoru. Na rozdíl napíklad od navigace automobilu, který je schopen se pohybovat pouze po pedem daných trasách, u tohoto typu úlohy není možné pedem pesn odhadovat trasu. Pedpokladem však zstává, že se lovk provádjící przkum, snaží zachovávat co nejpímjší smr k dosažení daného cíle. Zámrem tohoto projektu není pouze jednoduchá navigace zakládající se na pesném kopírování dat poskytnutých GPS pijímaem, ale také zlepšení prbhu navigace odstranním chyb vznikajících nepesnostmi v zamení pozice a technickými omezeními GPS, jako je napíklad malá frekvence poskytovaných vstupních dat pro navádní. Mezi možnosti jak tyto slabiny GPS potlait, i alespo ásten zamaskovat, patí predikce pohybu objektu, funkce statické navigace atd. Ped tvorbou takto specifického druhu aplikace, jakým naviganí systém bezesporu je, je poteba nastudovat velké množství informací, v tomto pípad z oboru geografie a geodézie. Oba tyto obory jsou pomrn složité a teoretických možností k ešení takto položeného problému je hodn. Pi hlubším studiu problému však zjišujeme, že pro vtšinu úkon v geografii, hlavn pak v oblasti pevod souadnic mezi zobrazeními, se vyskytují omezení, která nám pi rozumné míe náronosti nedovolují stoprocentn funkní naviganí systém implementovat. Navigace v systému je tak založena na WGS84, tedy systému délka-šíka, což mu díky absenci pevod do rzných náhradních zobrazení umožuje práci na kterémkoli míst planety. Práv díky pedpokladu, že budeme chtít naviganí systém umožující przkum na kterémkoli míst planety, jsou i základní metody nap. pro urení smru k cíli, orientaci v prostoru a podobn znan komplikovanjší, než pro systémy lokální, jakým by kupíkladu byl systém pro navigaci pouze v rámci eské republiky. Stanovení cíl diplomové práce z hlediska przkumu je obsahem druhé kapitoly. Tetí seznamuje se základními informacemi o GPS, dále pak rozbor použitého souadného systému a dat poskytovaných GPS pijímaem. tvrtá kapitola je vnována návrhu matematického ešení funkcí navigace a širší pohled do problematiky. Kapitola pátá je vnována funkci simulaního modulu, kapitola šestá nástinu implementace aplikace. Šestá kapitola je vnována výsledkm testování systému v reálném a simulovaném provozu. Závrená kapitola obsahuje zhodnocení práce, jejího pínosu a tipy na její možná rozšíení. 7
8 2 Rozbor problému a stanovení cíl Co vlastn rozumíme pod pojmem geografická przkumná akce? Jedná se o úlohu, pi které chceme na ureném prostoru za pomoci pístroj provádt sbr dat. Tato data mohou být obecn rzná, záleží na konkrétním zadání úlohy. Mže se jednat napíklad o geofyzikální nebo geochemická mení, letecké snímkování a podobn. Tyto úlohy, a už z jakékoli oblasti, mají spolený základ. Je poteba stanovit trasu, kterou budeme procházet a na ní data sbírat. Obecn se dá íci, že k systému zvolení trasy a jejímu následnému prchodu lze pistupovat dvma zpsoby. V tom prvním se objekt provádjící przkum ídí stanovenými význanými body v terénu, jakými jsou napíklad domy, cesty a podobn. Je však zejmé, že tento pístup nemže být použit vždy. Uvažme napíklad przkum na moi i v oblastech, jakými jsou velké prázdné plochy typu pouš. Díky absenci tchto orientaních bod nastává poteba pístrojové navigace po stanovené trase a práv této problematice je vnována tato práce. V rámci przkumu tedy budeme ešit naviganí úlohy zamené na zmapování dané oblasti. Naviganí úlohou rozumíme zpsob pohybu po zvoleném prostoru, v našem pípad navržení vhodné cesty, kterou si takto zvolený prostor pokryjeme pro sbr námi požadovaných dat. V návrhu cesty pro navigaci je poteba vycházet z poteb sbrae a zárove z omezení, která se odvíjejí z jeho schopnosti pohybovat se po zadaném prostoru. Poteby jsou v pípad przkumu zejmé. Pokrýt prostor co nejjemnjší sítí bod, na kterých bude mení provedeno, a tím dosažení co nejpesnjších a nejpodrobnjších informací o mapované veliin. V tomto bod ovšem dochází k problému schopnosti pesného zamení pozice vycházející z technologie jejího urení prostednictvím technologie GPS. Dalším omezením je schopnost pohybu, odvíjející se od prostedku který sbra dat k pohybu používá. 2.1 Naviganí úlohy Podívejme se nejprve jaké typy naviganích úloh je poteba uvažovat pro poteby územního przkumu za cílem sbru dat. Z hlediska navigace nás bude pedevším zajímat vytvoení cesty, která by nám umožnila projít stanovený prostor takovým zpsobem, aby byl možný dostaten detailní przkum. Jednoduchá linie Nejjednodušším typem naviganí úlohy je navigace po jednoduché linii. Navigace je provádna z poáteního bodu do bodu cílového po stanovené trase. Tím, že je vytváena pouze ze dvou bod, jedná se v podstat pouze o jejich propojení nejkratší možnou cestou (obrázek.1). Tato úloha je základním stavebním kamenem všech složitjších naviganích úloh. 8
9 z.šíka doasný cílový bod 2[š,d] cílový bod[š,d] poátení bod[š,d] doasný cílový bod 1[š,d] z.délka Obrázek.1 Jednoduchá linie Pokrytí plochy V pípad geografických przkumných akcí je navigace po zadané ploše (území) nejpoužívanjším typem naviganí úlohy. Jejím cílem je zmapovat pedem zadané území a sebrat na nm za pomoci pístroj k tomu urených potebná data. Pro vytvoení cesty na ploše je poteba znát dva body, které reprezentují poátek a cíl cesty. Dle poáteního požadavku na hustotu sbru dat je uren rozestup mezi jednotlivými liniemi cesty. Opouští-li objekt plochu vymezenou pro sbr dat prchodem posledním bodem na linii, pechází na novou linii navigace. U tohoto typu cesty je poteba brát na vdomí schopnosti jednotlivých dopravních prostedk, hlavn pak nemožnost rychlé zmny smru. Proto je nutné na hraniních bodech umožnit dle zadaného polomru vytvoit naviganí oblouk pro otoení. Zpsob pokrytí urené plochy cestou je ilustrován na obr..2. z.šíka body otáení v ploše [š,d] cílový bod [š,d] doasné cílové body 1,2,3,4,5 [š,d] Plocha poátení bod [š,d] z.délka Obrázek.2 Pokrytí urené plochy cestou Libovolná linie Posledním uvažovaným typem naviganí úlohy je libovolná cesta. Ta je tvoena sekvencí jednoduchých linií. Její základní kostra je tvoena body, ve kterých dochází ke zmn jejího smru. 9
10 Navigace po libovolné cest dokáže obsáhnout všechny typy cest a to vetn cesty pro navigaci po ploše. Tento pístup tvorby pokrytí plochy by však byl dosti komplikovaný na zjišování bod cesty. Z toho dvodu je funkce na pokrytí plochy cestou uvažována jako samostatná úloha. z.šíka cílový bod ásti cesty1[š,d] cílový bod[š,d] doasný cílový bod 2[š,d] doasný cílový bod 1[š,d] poátení bod[š,d] Obrázek.3 Libovolná cesta z.délka Podívejme se te na problém územního przkumu z jiného hlediska. Pi tvoení cesty po které se pi przkumu budeme pohybovat, musíme brát v úvahu dopravní prostedek, který pi nm budeme používat. Je patrné, že nemžeme cestu uvažovat stejn pro sbr dat za pomocí nap. letadla a v pípad, kdy bude przkum provádn pší chzí. Stanovme si tedy základní omezení která budeme pro tvorbu cesty v návaznosti na zpsob przkumu muset uvažovat. Chze je ideálním prostedkem pro sbr dat na malém prostoru a to hlavn z dvodu absolutní volnosti pohybu. Takto pohybující se lovk je schopen okamžit mnit svj smr pohybu, což mu umožuje rychle reagovat na zmny smru trasy ureného navigací. Mezi nevýhody patí práv vzdálenostní omezení pro prostor k zmapování a dále pesnost urení pozice. Pro pomalu se pohybující objekt je chyba urení polohy nejmarkantnjší. Przkum provádný za použití automobilu odstrauje nedostatek vzdálenostního omezení pi pším przkumu. Automobil má, podobn jako chze, pomrn dobrou možnost zmny smru a tím schopnost rychlé reakce na zmnu naviganích údaj. Problematické je jeho reálné využití, a to hlavn z dvodu pohybu po zpevnné ploše bez vtších terénních pekážek. U leteckého przkumu je poteba brát v potaz zejména vliv rychlosti dopravního prostedku a jeho neschopnosti rychlé reakce na zmnu smru. Pro jeho poteby bude poteba pi konstrukci cest umožnit vytvoení speciálních linií sloužících pro jeho otoení. 1
11 2.2 Prbh navigace V prbhu samotné navigace je poteba, aby ml uživatel co nejlepší podmínky pro prchod zvolené cesty. Údaji, které mu budou pro prchod trasy poskytnuty, jsou smr k cíli a vzdálenost k nmu. Musíme však brát v úvahu fakt, že samotné dosažení cíle není u tohoto typu úlohy podstatné. Podstatná je trasa, kterou cíle dosáhneme. Proto bude navíc poskytnut údaj o odchylce dosavadní trasy od trasy ideální formou vzdálenosti od ní. Zjišování aktuální polohy bude zajištno pomocí GPS. Ta nám ovšem není schopna dát stoprocentn pesnou polohu. Toto je problematické zejména v rámci pohybu nízkou rychlostí po malém prostoru, kdy se chyba v zamení výrazn projevuje ve výsledných naviganích údajích, jako napíklad urení smru k cíli i urování vzdáleností. Pro vyšší rychlosti, u kterých nepedpokládáme natolik pesnou schopnost navigace, nám vyvstává problém v asovém rozptí, ve kterém nám je GPS pijíma schopen obnovovat informace o naší aktuální pozici. V pípad, že by navigace zprostedkovávala uživateli výstup pouze z dat takto získaných, údaje sloužící pro rozhodování o zmn smru trasy by byly píliš skokové a schopnost držet se naplánované trasy by znesnadovaly. Naším cílem tedy bude konstrukce vhodné trasy dle zadaných parametr a následná navigace po ní. V rámci navigace samotné pak realizace funkcí, které budou zlepšovat a zpesovat její prbh. 11
12 3 Údaje o poloze 3.1 GPS Global positioning system(zkrácen GPS) je družicový naviganí systém pracující na principu rádiového dálkomru pomocí nhož je možno urit pozici kdekoli na zemi s pesností na nkolik metr. Pro tuto práci je princip fungování GPS obecn nepodstatný. Podívejme se tedy na nj pouze z toho pohledu, který nás nejvíce zajímá, a tím je chyba zamení pozice. GPS, je schopen urovat polohu s pesností v ádech jednotek metr. Tato pesnost je do velké míry dána kvalitou GPS pijímae a potem satelit od nichž jsme schopni pijímat signál. Existují zpsoby jak pesnost urení polohy navyšovat a to napíklad použitím DGPS. Ten funguje na principu více pijíma polohy (nejmén dvou) z nichž alespo jeden má pevnou polohu a zná dlouhodobým mením svou pesnou pozici. Je-li vybudována sí takovýchto pijíma a jsou-li data pro pohybující se pijíma tmito hodnotami korigována, je možné dosáhnout pesnosti až na desítky centimetr (nap. pro eský CZEPOS je pesnost až,25m). V této práci však tato technika použita není, požaduje totiž speciální pijímae a jednou z podmínek práce je její zprovoznní s použitím bžných turistických pijíma.v pípad zájmu o podrobnjší nastudování fungování GPS je možno hledat informace nap. zde [8], nebo [9] GPS pijíma Pro píjem signálu GPS je využíváno bžného turistického GPS pijímae, a to konkrétn Evolve itraxx. Jedná se o model využívající chipsetu MediaTek MT3, který by práv díky nmu ml umožovat relativn pesné informace o pozici a to i v hornatém terénu nebo v zastavné oblasti. Pijíma komunikuje s PC za pomocí standardního protokolu NMEA v3. pes bluetooth (virtuální sériový port). Protože se jedná o velmi jednoduchý GPS pijíma s cenou ádov okolo 1 korun eských, není možné nastavovat frekvenci odetení informací, což je z pohledu výzkumné práce škoda. Práv frekvence obnovení dat je pro typ práce s GPS jako je tato nejvtší slabinou. Obnovení dat jednou za sekundu je pro naše úely nedostatené a bude poteba se s tímto problémem v rámci analýzy a následné implementace vyrovnat. 12
13 3.1.2 NMEA 183 Protokol NMEA 183 kombinuje elektronickou a datovou specifikaci pro komunikaci mezi rozmanitými zaízeními využívanými námonictvem jako sonary, gyrokompasy atd. Tento protokol je používán také pro komunikaci mezi GPS pijímai a PC. Pro tuto práci je pímé elektronické pozadí nepodstatné, uveme tedy pouze to, že je penos dat realizován pomocí sériové linky (protokol RS- 232) v asynchronním módu. NMEA 183 pracuje na principu komunikace jednoho mluvího s naslouchajícím, piemž naslouchající nemusí být pouze jeden. Komunikace probíhá odesláním vty (sentence) naslouchající stran. Standart na aplikaní úrovni definuje strukturu vty. Strukturu vty rozebereme na píkladu vty typu GGA: $GPGGA, , ,N, ,W,1,7,1.,9.,M,,,,*18 Znak $ uvozuje každou nov odeslanou (pijatou) zprávu. Dále je následován dvojicí znak v našem pípad GP. Uvození GP znaí, že se jedná o vtu zaslanou GPS pijímaem. Následuje oznaení typu odeslané zprávy, v tomto pípad zprávy typu GGA. Další údaje jsou již pímo data odesílaná jako obsah zprávy. Jsou od sebe oddlena árkou a jejich poet a význam závisí na typu vty. Vta je ukonena kontrolním soutem uvozeným znakem * a dvojicí znak <CR><LF>. Obecn standard NMEA 183 obsahuje vtší poet vt, z nichž ne všechny jsou v našem pípad použity a i GPS pijímae poskytují pouze nkteré z nich. Zmime tedy všechny pouze jejich výtem a podrobnji se zamíme pouze na ty v projektu použité. Jsou to tedy vty GGA, GLL, GSA, GSV, MSS, RMC, VTG a ZDA. Jejich popis lze nalézt v referenním manuálu NMEA viz. [2]. Pro funkci naviganího systému potebujeme znát následující informace: údaje o zempisné délce a šíce; polokouli, na které se aktuáln nalézáme; as; poet pipojených satelit. Údaje vztahující se k poloze bereme z vty typu GGA. Napíklad pro vtu: $GPGGA, , ,N, ,W,1,7,1.,9.,M,,,,*
14 1. GGA - identifikátor; as ve formátu hhmmss.sss; zempisná šíka ve formátu ddmm.mmmm; 4. N - polokoule, nabývá hodnot N(severní) nebo S(jižní); zempisná délka ve formátu dddmm.mmmm; 6. W - polokoule, nabývá hodnot E(východní) nebo S(západní). Údaje o potu viditelných satelit bereme z vty typu GSV Napíklad pro vtu: $GPGSV,2,2,7,9,23,313,42,4,19,159,41,15,12,41,42* GSV - identifikátor; poet pipojených satelit. 3.2 Souadné systémy, zobrazení Jako zdroj dat urených pro urení polohy a následnou navigaci byl tedy zvolen Globální poziní systém GPS. Prvním krokem pro ešení úkolu, jakým je implementace naviganího systému je stanovení souadného systému nebo vhodného zobrazení, ve kterém budeme nadále pracovat. Zobrazení a systém je velká ada a výbr vhodného kandidáta pro budoucí práci je poteba dkladnji prozkoumat jejich omezení a možnosti, abychom se mohli rozhodnout, který je pro naše poteby nejvhodnjší. Vtšina zobrazení je lokálního charakteru, nebo je jen jistou formou dvou nejpoužívanjších souadných systém, jimiž jsou UTM a WGS84. Zamme se tedy práv na tyto dva a rozeberme postupn jejich výhody a nevýhody UTM Zanme prvním jmenovaným a to Univerzálním Transverzním Mercatorovým systémem souadnic (UTM)[1]. Jedná se o sí šedesáti zón zobrazených pomocí transverzního Mercatorova zobrazení (jedná se o zobrazení ástí elipsoidu do roviny), proto v nm lze poítat pímo v metrech a vzdálenost jednotlivých bod sít, kterými je elipsoid pokryt, je stejná. Pro každou z tchto zón je poátek stanoven do bodu o souadnicích [,]. Vzhledem k nekontinuit bod pi pechodu mezi zónami vyvstává problém s návazností cest a orientací v prostoru. Tento problém samozejmešit lze (a do jisté míry je ešen i u WGS84) a to stanovením doasné zóny nebo pevodem souadnic z UTM do 14

15 vlastního zobrazení. Vzhledem k tomu, že nám GPS pijíma poskytuje souadnice ve formátu WGS84, které by se pevádly do UTM a následn ješt do zobrazení, které by eliminovalo zóny, je použití UTM i pes velkou výhodu metrického mení v nm píliš pracné. Druhá varianta, stanovení doasné UTM zóny, spadá do znalostí vyšší geodézie a po konzultacích s odborníky jsem od této varianty upustil (nepodailo se mi najít výpoet, který by pro m, jako pro laika v oblasti geodézie, byl realizovatelný). Z tchto dvod bylo pi analýze problému od tohoto zobrazení upuštno a celá navigace je realizována pímo ve WGS WGS84 Obrázek.4 UTM[1] World Geodetic System svtový geodetický systém definující souadnicový systém, geoid a elipsoid pro geodézii a navigaci. Jedná se o pravotoivou kartézskou soustavu souadnic se stedem v tžišti zem, kde kladná osa x smuje k prseíku nultého poledníku a rovníku, kladná osa z k severnímu pólu a kladná osa y je na ob pedchozí kolmá ve smru doleva (9 východní délky a šíky), tvoí tak pravotoivou soustavu souadnic. WGS84 dlí elipsoid na tyi polokoule.i pesto, že se jedná o kartézský souadný systém nelze s ním pracovat pro navigaci pímo. Vzhledem k mapování souadnic na kouli, nikoli na plochu, není zobrazení délkojevné (nezachovává pomr vzdáleností). 15
16 Smrem od nultého poledníku na sever i jih dochází ke zkracování vzdáleností mezi dvma body. WGS84 lze použít pro navigaci s upesnním nkterých podmínek. Práv délkojevnost je nejvtším problémem pi práci v systému WGS84. Tím že systém délkojevný není, nelze vzdálenost dvou bod bez pedchozího výpotu stanoveného dle jejich polohy urit. Navíc zkracování vzdáleností smrem k pólm je odlišné pro zempisnou šíku i délku. I pes tuto nevýhodu byl WGS84 zvolen jako základ pro celou práci. GPS dává souadnice v tomto formátu a odpadá tak jejich prvotní pevod do jiných souadných systém, i zobrazení. Výpoet vzdálenosti Ve WGS84 nelze jednoduchým zpsobem poítat vzdálenosti dvou bod. Neexistuje zde délková jednotka, která by urovala vzdálenost bod od sebe. Vzdálenost lze poítat za pomoci odvození vzdáleností bod na rovníku. Pedstavme si kružnici o polomru 3m jejíž sted je napoprvé umístn na souadnici 1 severní šíky a 1 východní délky. V rámci WGS84 tento polomr na této pozici odpovídá pibližn 1 šíky i délky. Naproti tomu polomr stejné kružnice umístné tentokráte v bod 8 severní šíky a 1 východní délky odpovídá asi 11 zempisné délky (v rámci zempisné šíky je zmna malá, ovšem ne zanedbatelná). Každou ze vzdáleností, kterou chceme vyjadovat v metrech, je proto poteba dopoítávat za pomoci stanovení vzdálenosti mezi souadnicemi ve WGS84 v aktuální pozici a následn pro urení vzdálenosti dvou bod stanovit jejich vzdálenost v metrech v rámci zempisné šíky, zempisné délky a teprve poté pomocí trojúhelníku dopoítat jejich reálnou vzdálenost. Jeden stupe šíky na rovníku odpovídá vzdálenosti 111 2m (111.2km). Jedna minuta šíky na rovníku odpovídá vzdálenosti 1853m. Jedna vteina šíky na rovníku odpovídá vzdálenosti 3.9m. Pro všechny ostatní zempisné délky je daná vzdálenost násobena cosinem odpovídající zempisné šíky. Zkreslení Pi pevodech souadnic do nkterého ze zobrazení se nevyhneme vznikajícímu zkreslení. Zkreslení, které jsme ochotni akceptovat, záleží do velké míry na pesnosti s níž chceme navigaci provádt. U systému šíka-délka je možno pevádt povrch kulové plochy do roviny v tom pípad, že uríme plochu, která má takovou velikost, že se nám na ní zkreslení výrazn neprojevuje. Obecn je to plocha kruhu o polomru 1km, která v tomto pípad odpovídá zkreslení 1m což je pi možnostech urení polohy GPS pijímae dostatená pesnost. 16
17 Výpoet zkreslení Uvažujme pro demonstraci body 1 5' 4" západní délky a 1 51' 4" západní délky. Vzdálenost tchto dvou bod na rovníku odpovídá 1853m. Dále uvažujme dv dvojice bod o tchto délkách ovšem na 23 26' 22" (obratník raka) a 23 31' 46"severní šíky. Rozdíl tchto dvou zempisných šíek odpovídá vzdálenosti cca 1km. Vzdálenost pro body na 23 26' 22" severní šíky odpovídá 1698,93m. Vzdálenost pro body na 23 31' 46" severní šíky odpovídá 17,9m. Z toho plyne, že posunem o 1km ve smru zempisné šíky se zkracuje vzdálenost dvou bod pibližn o jeden metr. 17
18 4 Návrh ešení funkcí navigace 4.1 Typy bod Pro analýzu tvorby cest a souvisejících podmínek, které jsou na navigaci kladeny je poteba rozlišit nkolik typ bod, které se budou pi ešení naviganích úloh vyskytovat. Krom tch zde uvedených rozlišujeme ješt další podtypy bod a to podle toho, v jakém tvaru jsou v nich souadnice uvedeny. Tj. buto v decimálním tvaru nebo ve tvaru hodina-minuta-vteina ve stupních. U tchto bod potebujeme znát následující údaje: 1. zempisná délka; 2. zempisná šíka; 3. pomocná zempisná délka (transformovaná); 4. pomocná zempisná šíka (transformovaná); 5. polokouli, na které leží (SV, SZ, JV, JZ); 6. typ bodu Typy bod cest Pro správné ešení naviganí úlohy je nutné pochopit že je žádoucí nejen dostat se do cílového bodu, ale hlavn zpsob, jak se k cíli dostaneme. V pípad, že bychom se k cíli dostali cestou která nekoresponduje s tou, která byla zadána (která byla navržena v terénu), jsou data nepoužitelná, protože nám jde prvoad o data poízená v konkrétních místech cesty. Tato skutenost nás nutí uvažovat v cest pomrn znané množství typ bod. Poátení bod Poátení bod cesty je zadáván uživatelem. Jedná se vlastn o první doasný cílový bod navigace, na který je uživatel navádn. Je-li pi zapoetí navádní uživatelova aktuální pozice totožná s poátením bodem cesty, pak je pro navigaci vybrán další z doasných bod. Cílový bod Je chápán jako úplný konec cesty. Po dosažení tohoto bodu je navigace ukonena. 18
19 Cílový bod ásti cesty Je pomocným bodem pro vytváení složitjších (libovolných) cest. V tchto bodech aplikace rozlišuje, zda je poteba pepnutí do jiného možného typu transformace souadnic cesty (více v kapitole 4.2.2). Doasný cílový bod Vzhledem k podmínkám reálného provozu není technicky možné, aby uživatel zadával všechny potebné body pro navigaci run. Proto jsou v rámci tvorby cesty vytváeny pomocné cílové body, ke kterým bude uživatel smrován. Tyto pomocné cíle jsou nazývány doasnými cílovými body. Bod otáení v ploše (doasný cíl na hran) Doasný cíl na hran je speciálním typem doasného cíle. Tyto doasné cíle leží v míst, ve kterém opouštíme plochu po naviganí linii. Jako speciální typ tyto body evidujeme z dvodu detekce pohybu mimo zadanou plochu v míst zmny smru cesty nebo jako bod poátku otáení. Pi navigaci, obzvlášt pro dopravní prostedky s omezenou možností zmny smru, vyvstává práv poteba rozlišovat tento typ bod, ve kterých bude probíhat otáení Typy bod pro navigaci Aktuální bod Aktuální pozicí rozumíme bod, na nmž se v danou chvíli nacházíme v rámci souadného systému. Jedná se o hodnotu obmovanou jedenkrát za sekundu, vždy po obdržení nových informací o pozici z GPS pijímae. Aktuální pozice slouží pro výpoet smrového vektoru pohybu, urení momentálního smru cíle, orientaci v prostoru a výpoet dosažení bodu. Pedcházející bod Ve chvíli, kdy je obdržena nová aktuální pozice od pijímae GPS, stává se z nynjší aktuální pozice pedchozí pozice. Pedchozí pozice slouží pro výpoet smrového vektoru pohybu, urení momentálního smru cíle, urení minutí cíle a pro orientaci v prostoru. 19

20 4.2 Vytvoení cesty Pro bližší pedstavu toho, co obnáší samotné vytvoení cesty, je poteba zamyslet se hloubji nad tím, jak ve skutenosti vypadá pokrytí elipsoidu body reprezentujícími jednotlivé pozice v rámci systému WGS84. Situaci ilustruje obrázek.5. Obrázek.5 pokrytí elipsoidu souadnicemi WGS84 [16] Pi pohledu na obrázek je zejmé, že vzhledem k souadnému systému nemžeme uvažovat souvislý pírstek i úbytek hodnoty pozice. Od nultého poledníku (prime meridian) nám hodnota délky (longitude) v obou smrech (na východ i západ) vzrstá, od stoosmdesátého naopak klesá. U rovníku (equator) je tomu podobn, zde smrem k pólm hodnota zempisné šíky (latitude) stoupá. Z toho nám plyne, že napíklad blížíme-li se od severu k rovníku hodnota souadnice šíky klesá a po jeho pekroení nám optovn zane stoupat. Tento problém ovšem nenastává pouze v pípad, kdy tyto hranice pekraujeme v rámci cesty, ale napíklad také v pípad, že by cesta byla tažena velmi blízko ní. Dostávali bychom se na jinou polokouli a souadnice by odpovídala jinému postavení, než ve kterém ve skutenosti jsme. Nabízí se ešení pomocí kontroly náležitostí aktuálního bodu a cílového bodu do konkrétní polokoule a jejich vzájemnou polohu (smru k cíli) ešit v souvislosti s nimi. Toto ešení je ovšem velmi pracné. Proto jsou ped samotným vytvoením cesty pekontrolovány již známé údaje o ní a v pípad, že se body cesty blíží hranici polokoulí, jsou body cesty pepoítány (posunuty) od této hranice dále. Pro pípad, že body hranici pímo pekraují, jsou posunuty a v rámci posunutí 2
21 pepoítány tak, aby na sebe hodnoty plynule navazovaly. Následující podkapitola ukazuje možnosti, které mohou nastat pi vytváení cesty v souvislosti s tmito situacemi Polohy cesty Možností, které mohou nastat u tvoení cesty, je celkem 15. V dalším textu bude formulace pesahuje okrajem pes oznaovat, že cesta leží celá na jedné z polokoulí, ale je píliš blízko hranice pechodu na polokouli jinou. Hranicí, kdy je pro nás cesta píliš blízko, byla stanovena velikost 1 zempisné šíky nebo zempisné délky. Možnosti pi tvoení cesty tedy jsou: 1. Cesta leží celá na jedné polokouli vetn okraj; 2. Cesta leží celá na jedné polokouli, pesahuje okrajem pes hranici zempisné délky a zempisné šíky; 3. Cesta leží celá na jedné polokouli, pesahuje okrajem pes hranici zempisné délky; 4. Cesta leží celá na jedné polokouli, pesahuje okrajem pes hranici zempisné šíky; 5. Cesta leží celá na jedné polokouli, pesahuje okrajem pes hranici 18 zempisné délky; 6. Cesta leží celá na jedné polokouli, pesahuje okrajem pes hranici zempisné šíky a 18 zempisné délky; 7. Cesta pekrauje hranici zempisné délky; 8. Cesta pekrauje hranici zempisné délky a pesahuje okrajem pes hranici zempisné šíky; 9. Cesta pekrauje hranici 18 zempisné délky; 1. Cesta pekrauje hranici 18 zempisné délky a pesahuje okrajem pes hranici zempisné šíky; 11. Cesta pekrauje hranici zempisné šíky a pesahuje okrajem pes hranici zempisné délky; 12. Cesta pekrauje hranici zempisné šíky a pesahuje okrajem pes hranici 18 zempisné délky; 13. Cesta pekrauje hranici zempisné šíky; 14. Cesta pekrauje hranici zempisné šíky, cesta pekrauje hranici zempisné délky; 15. Cesta pekrauje hranici zempisné šíky, cesta pekrauje hranici 18 zempisné délky. 21
22 Obrázek.6 Možné polohy cest vzhledem k hranicím polokoulí Transformace souadnic Pro typ cesty 1 jsou souadnice ponechány pvodní. V pípadech, kdy je cesta postavena celá na jedné z polokoulí avšak, její okraje pesahují v hranice zempisné šíky nebo zempisné délky, je k souadnicím piten jeden stupe pro zempisnou šíku nebo délku pípadn pro ob souadnice. V pípad pesahu okraje pes 18 zempisné délky je jeden stupe odeten. Pekrauje-li cesta hranici polokoulí pes délky, jsou souadnice pepoteny následujícím zpsobem: pro body, které leží na stejné polokouli jako poátek cesty, je rovna nová souadnice 9 - skutená poloha zempisné délky. Leží-li na polokouli jiné, její souadnice je rovna 9 + skutená poloha zempisné délky. 22
23 Pekrauje-li cesta hranici polokoulí pes 18 délky, jsou souadnice pepoteny následujícím zpsobem: pro body které leží na stejné polokouli jako poátek cesty, je rovna nová souadnice 18-skutená poloha zempisné délky. Leží-li na polokouli jiné, její souadnice je rovna 18 + skutená poloha zempisné délky. Pekrauje-li cesta hranici šíky, je výpoet ekvivalentní výpotu pro pechod pes délky. Souadnice jsou pouze upravovány pro zempisnou šíku. Pekrauje-li cesta hranice více jak dvou polokoulí, je výpoet totožný s díve popsaným a metody pepotu souadnic se kombinují. SZ z.šíka SV bod 3 [3, 3] [93, 93], z.délka JZ bod 1 [2, 2] [88, 88] bod 2 [2, 3] [88,93] JV Obrázek.7 transformace bod pi pechodu zem. šíky a zem. délky Na obrázku.7 je vyobrazena situace, kdy cesta pechází z jihozápadní polokoule (bod 1) na severovýchodní (bod 3) pes jihovýchodní (bod 2) polokouli, a demonstrován pevod na transformované souadnice. ernou barvou je oznaena souadnice pvodní, ervenou pak souadnice transformovaná. Tak jako jsou transformovány souadnice cest, musí se posléze pi probíhající navigaci transformovat také souadnice aktuálního bodu. Klíem pro urení, jakým zpsobem bude transformace provedena, jsou údaje o polokouli na které aktuální bod leží, pozice cesty a transformace bod na ní. 23
24 U všech typ cest je prvním krokem zadání poáteního a cílového bodu cesty. Zadání souadnic je umožnno dvma zpsoby. Tím prvním je odetení aktuální polohy z pijímae GPS, tím druhým pak runí zadání souadnic bodu ve formátu úhel-minuta-vteina. Následn je urena poloha cesty vzhledem ke kvadrantm a z ní jsou stanovena pravidla pro transformaci souadnic. Pak již zaíná samotný výpoet jednotlivých bod cesty dle zadaných parametr Vytvoení jednoduché linie Po úkonech spolených pro tvorbu všech cest je dle požadovaných rozestup doasných cíl cesta rozdlena na úseky a následn jsou vygenerovány všechny cílové body cesty. Body jsou v ase vytváení oznaeny píslušnými typy Vytvoení libovolné cesty Pi vytváení libovolné trasy uživatel zadává jednotlivé body cesty. Postauje zadání význaných bod cesty tj. tch, ve kterých cesta mní svj smr (cílové body ásti cesty). Po zadání posledního bodu je možné jednotlivé ásti dodaten rozdlit a vytvoit na nich další doasné body. Doasné cílové body lze tvoit buto pro jednotlivé ásti cesty samostatn, nebo je lze vytvoit podle jednoho zadání na celé cest najednou. Jednotlivé ásti cesty a jejich body jsou pak generovány stejn jako pro jednoduchou linii. Tímto krokem je vygenerován píslušný poet ástí cesty i s jejich pípadnými transformacemi vi reálným pozicím zaznamenaných v pomocných souadnicích. Nyní je poteba cestu projít jako celek a v pípad, že v souadnicích cesty došlo k transformaci, upravit celou cestu tak, aby na sebe jednotlivé ásti navazovaly. Po této úprav je již cesta ve finální podob Vytvoení pokrytí plochy Pokrytí plochy je speciálním pípadem vytváení cesty za pomoci základní cesty, kterou je vytvoení jednoduché linie. Podmínkou je zadání poáteního bodu, koncového bodu a kritérií urujících jak hustou sítí pomocných bod bude oblast pokryta. Vzdálenost jednotlivých linií od sebe je zadávána jako velikost úseku ve smru zempisné délky, vzdálenost doasných cílových bod pak jako velikost úseku ve smru zempisné šíky. Poátení a koncový bod jsou vzájemn porovnány a cesta je následn tvoena dle jejich postavení. Naviganí linie jsou vždy tvoeny ve smru zempisné šíky viz obrázek. 8. Prostor je takto procházen až do dosáhnutí posledního vytyeného cíle. Doasné cíle jsou stanoveny jako prseíky hranice oblasti s pímkami tvoenými sítí doasných bod. Orientace cesty vytvoené na ploše je dána umístním poátku a cíle cesty. 24
25 z.šíka cílový bod [š,d] linie Plocha poátení bod [š,d] z.délka Obrázek. 8 Postup vytváení bod cesty pi pokrývání plochy 4.3 Otáení Pi tvoení naviganích linií pi przkumu plochy mže nastat situace, kdy potebujeme, aby jejich rozestup byl menší, než na jakém jsme schopni se otoit, abychom mohli plynule navazovat na przkum. Z tohoto dvodu je možno vytvoit naviganí oblouk, který nám pomže navést se na další linii. Obrázek. 9 Postup vytváení bod pro otáení 25
26 Body 1 a 7 (obr.1) jsou body jedné konící a druhé zaínající linie. Zelen jsou oznaeny body vytvoené pro plynulé otoení se a navázání naviganí linie. Polomr r znaí polomr otáení objektu, d je vzdálenost mezi jednotlivými liniemi cesty. Oblouk je natahován vždy smrem do naviganí linie. Jedin tak mžeme dosáhnout toho, že na poátek další linie budeme navazovat pímo. 4.4 Dosažení cíle Vzhledem ke skutenosti, že cíle jsou zadány jako jednotlivé body, nelze jejich dosažení porovnávat na základ shodnosti aktuálních souadnic se souadnicemi cíle. Je totiž v podstat vyloueno, aby se v reálném provozu tyto hodnoty vzájemn rovnaly. Proto je nutno k cílovému bodu vytvoit oblast, pro kterou budeme,v pípad že do ní aktuální bod náleží, považovat cíl za dosažený. z.šíka r cílový bod [lat,long] aktuální pozice 1 [š,d] aktuální pozice 2 [š,d] pedchozí pozice[š,d] z.délka Obrázek. 1 Vyhodnocení dosažení bodu Z obrázku. 1 je patrné, že aktuální pozici.1 považujeme za dosažení cíle, pozici.2 nikoliv. Polomr r je zadáván uživatelem jako tolerance dosažení bodu. 4.5 Minutí cíle Pi navigaci je poteba uvažovat pípad, kdy bod nebyl dosažen a pesto jsme v rámci cesty již za jeho hranicí. Není-li možné (nebo potebné), aby se objekt, který przkum provádí, otoil a cíle opravdu dosáhl, je poteba automaticky zrušit aktuální cíl a provádt navigaci na další. Tento pípad je typický napíklad pro navigaci letadla. 26
27 z.šíka aktuální pozice [š,d] pedchozí pozice [š,d] následující cíl [š,d] aktuální cíl [š,d] pedchozí cíl [š,d] 1 2 z.délka Obrázek. 11 Minutí cíle Na obrázku. 11 vidíme za jakých podmínek je možno považovat cíl za minutý. Mjme cestu danou pedchozím cílovým bodem a aktuálním cílovým bodem. Sestrojíme pímku, která nám bude v aktuálním cílovém bod dlit rovinu na dv poloroviny a to tak, že tato pímka bude kolmá k cest práv mezi pedchozím cílovým bodem a aktuálním cílovým bodem. V pípad, že bod naší pedchozí polohy bude náležet do poloroviny na obrázku oznaené jako.1 a aktuální bod bude ležet v polorovin.2, došlo k minutí cíle. Pi minutí se navigace pepíná na následující cílový bod. 4.6 Urení smru k cíli Jelikož GPS udává pouze pozici, na které se aktuáln nacházíme, a není možné z obdržených dat pímo usoudit na smr pohybu, je pro urení smru pohybu využito pedchozí polohy. Z aktuální a pedchozí pozice lze stanovit vektor, který udává smr pohybu v prostoru. Urení smru k cíli je v podstat nejdležitjším a základním problémem v ešení navigace. Rozeberme si tedy tento problém podrobnji. V nkterých ástech následující kapitoly budeme pro lepší zápis znait zempisnou šíku jako y a zempisnou délku jako x. Cílový bod nám dlí prostor do ty kvadrant (obrázek.12). 27
28 y 4 1 cílový bod x 3 2 Obrázek. 12 Kvadranty cílového bodu Piemž: Kvadrant 1 hodnota x a y vzrstá smrem od cílového bodu; Kvadrant 2 hodnota x vzrstá smrem od cílového bodu, pro y hodnota klesá; Kvadrant 3 hodnota x a y klesá smrem od cílového bodu; Kvadrant 4 hodnota x klesá smrem od cílového bodu, pro y hodnota vzrstá. Jak již víme pro WGS84 platí že poloha x =, y = odpovídá prseíku zempisné šíky a zempisné délky a zárove hodnoty souadnic nenabývají záporných hodnot. Z toho nám plyne, že okolo bodu x =, y = dochází k otáení osy v obou smrech. Výsledek pro naše zobrazení kvadrant demonstruje obrázek
29 y 3 y y cílový bod x cílový bod x y [,] y x cílový bod x cílový bod x Obrázek. 13 Zobrazení kvadrant Smr k cíli je dán doplkem úhlu, který je svírán vektorem pohybu s pímkou vedenou cílovým bodem a aktuální polohou do 18. Na obrázku.14 je zobrazen princip stanovení smru k cíli (ve 4 kvadrantu, SV polokoule). z.šíka aktuální pozice [š,d] pedchozí pozice [š,d] aktuální cílový bod [š,d] z.délka Obrázek. 14 Urení smru k cíli V tuto chvíli známe úhel, který nám uruje smr k cílovému bodu. Prozatím však není brán v úvahu smr pohybu v rámci kvadrantu a tedy natoení objektu vi cílovému bodu. Pro urení orientace je 29
30 poteba sestrojení dvou pravoúhlých trojúhelník a následné porovnání úhl pilehlých k cílovému bodu. Rozeznáváme pak tyi druhy natoení. Cílový bod leží po levé stran pohybu, pravé stran pohybu, nebo jsme natoení pímo na nj (od nj). Viz obrázek.15. Y aktuální pozice [X1,Y1] pedchozí pozice [X2,Y2] aktuální cílový bod [X3,Y3] X Obrázek. 15 Urení natoení vi cíli Známe úhel a natoení smrem cíli. Na obrázku. 13 je znázornna zmna postavení kvadrant vzhledem k pozici cílového bodu. Z nj vidíme, že kvadranty nejsou za všech okolností postaveny vi bodu se souadnicí zempisné šíky a zempisné délky stejn. Tyto zmny se následn promítají do postavení objektu vi cílovému bodu. SZ Y 8 Y 8 SV cílový bod [X3,Y3] cílový bod [X3,Y3] X X Obrázek. 16 Urení smru k cíli Obrázek. 17 Urení smru k cíli Na obrazcích.16 a 17 je shodn vyobrazen pohyb z bodu [7,7.5] do bodu [6.5,5]. Snahou je dosáhnout cíle v bod [4,4]. Pestože jsou parametry zadány stejn vidíme, že na SZ polokouli (obrázek.16) je pozice cílového bodu ku smru cesty vlevo, naopak na SV polokouli (obr.17) je vpravo. 3
31 ešením tohoto problému je pepoet úhlu pro výsledné zobrazení podle typu cesty a pozic jednotlivých bod práv využívaných pro výpoet. Pro urení, který typ rozdlení kvadrant pi výpotu použijeme, vycházíme z typu cesty a jejího poátku. Zajímáme se zejména o postavení poáteního bodu cesty v rámci polokoulí. V tabulce.1 a 2 vidíme, jak typ cesty a pozice poáteního bodu ovlivují zobrazení kvadrant vzhledem k cílovému bodu. Typ cesty Postavení poáteního bodu(polokoule) 1 SV nebo JZ 2 SV nebo JZ 3 SV nebo JZ 4 SV nebo JZ 5 SV nebo JZ 6 SV nebo JZ 7 SZ nebo JV 8 SZ nebo JV 9 SV nebo JZ 1 SV nebo JZ 11 SZ nebo JV 12 SZ nebo JV 13 SZ nebo JV 14 SV nebo JZ 15 SZ nebo JV Tabulka.1 zobrazení kvadrant 1 a 4 31
32 Typ cesty Postavení poáteního bodu(polokoule) 1 SZ nebo JV 2 SZ nebo JV 3 SZ nebo JV 4 SZ nebo JV 5 SZ nebo JV 6 SZ nebo JV 7 SV nebo JZ 8 SV nebo JZ 9 SZ nebo JV 1 SZ nebo JV 11 SV nebo JZ 12 SV nebo JZ 13 SV nebo JZ 14 SZ nebo JV 15 SV nebo JZ Tabulka.2 zobrazení kvadrant 2 a 3 Pro konené urení úhlu k zobrazení vycházíme z postavení aktuálního a pedchozího bodu vi sob a podle kvadrantu, ve kterém se v kontextu cílového bodu nacházejí. Rozlišujeme pak nkolik základních postavení bod (viz. následující kapitoly). Znaení bod a úhl odpovídá tomu z obrázku
33 4.6.1 Stejný kvadrant Jestliže body reprezentující aktuální polohu a pedchozí polohu leží oba ve stejném kvadrantu pak je konený úhel k cíli vypoten dle tabulky.3. Pedchozí bod Aktuální bod Podmínka úhel k cíli (kvadrant) (kvadrant) zobrazení 1 nebo 4 zobrazení 2 nebo > < > < > < > < Tabulka.3 výpoet úhlu k cíli (stejné kvadranty) Každý z bod leží v jiném kvadrantu Leží-li body každý v jiném kvadrantu a zárove spolu tyto kvadranty sousedí, je úhel stanoven podle tabulky. 4. Pedchozí bod Aktuální bod úhel k cíli (kvadrant) (kvadrant) zobrazení 1 nebo 4 zobrazení 2 nebo Tabulka.4 výpoet úhlu k cíli (rzné kvadranty) Pi navigaci mže nastat situace, kdy se dostáváme skrz cílový bod do kvadrantu ležícího za ním, a pesto jsme cílového bodu nedosáhli (viz. Obrázek. 18). Tato situace mže nastat pi vysoké rychlosti objektu a zárove vypnuté funkci minutí cíle. Urení úhlu pro tuto situaci popisuje tabulka.5. 33
34 Pedchozí bod Aktuální bod Podmínka úhel k cíli (kvadrant) (kvadrant) zobrazení 1 nebo 4 zobrazení 2 nebo > < = > < = > < = > < = Tabulka.5 výpoet úhlu k cíli (rzné kvadranty) z.šíka aktuální pozice [š,d] cíl [š,d] pedchozí pozice [š,d] Obrázek. 18 Krok za cíl z.délka Body mohou ležet na hranici mezi kvadranty. Oznaení hranic kvadrantu zavedeme jako dvojciferné íslo obsahující ísla jednotlivých kvadrant. Pro pechod kvadrant 1 a 2 je to 12, pro kvadranty 2 a 3 pak 23, pro pechod mezi 1 a 4 kvadrantem 14 a pechod mezi kvadranty 3 a 4 ozname jako 34. Pro toto postavení bod urujeme úhel dle tabulky.6. 34
35 Pedchozí bod Aktuální bod (kvadrant) (kvadrant) úhel k cíli zobrazení 1 nebo 4 zobrazení 2 nebo Tabulka.6 výpoet úhlu k cíli (pomezí - kvadrant) 35
36 Posledním pípadem je možnost, kdy body leží oba na pomezí kvadrant (tabulka.7). Pedchozí bod Aktuální bod Podmínka úhel k cíli (kvadrant) (kvadrant) zobrazení 1 nebo 4 zobrazení 2 nebo y1 < y2 x1 = x y1 > y2 x1 = x y1 < y2 x1 = x y1 > y2 x1 = x x1 < x2 y1 = y x1 > x2 y1 = y x1 < x2 y1 = y x1 > x2 y1 = y2 18 Tabulka.7 výpoet úhlu k cíli (pomezí kvadrant) 4.7 Speciální funkce U navigace narážíme na nkolik problém vycházejících z principu fungování systému GPS, které nám buto znesnadují nebo pímo znemožují korektní výpoet a následné zobrazování informacích pro navigaci potebných. Je poteba uvážit možnosti, kterými by bylo možno tyto vlastnosti eliminovat, i pípadn alespo zamaskovat. Mezi problémy patí zejména chyba pro urení pesné pozice a malá frekvence získávání dat Statická navigace Funkce statické navigace bývá asto obsažena již pímo v pijímai signálu GPS, nemusí to však být pravidlem. Tato funkce slouží pro potlaení oscilace bodu v pípad, že objekt provádjící navigaci nevykonává pohyb. Toto je žádoucí hlavn v pípad navigace pro objekt pohybující se nízkou rychlostí a v pípad, že je objekt schopen v rámci svého pohybu po zadané trajektorii zastavit. Pi zapnuté funkci statické navigace je zpravidla ignorován pohyb, který nedosahuje rychlosti kolem 4 36
37 km/h. V našem pípad je rychlost pro kterou je zmna pozice brána jako chyba mení 3,6 km/h (1m/s). Obrázek. 19 Statická navigace vypnuta Obrázek. 2 Statická navigace zapnuta Na obrázku. 19 je možno vidt dsledek oscilace bodu pi vypnuté funkci statické navigace. Obrázek. 2 ukazuje tentýž modelový píklad avšak se zapnutou funkcí statické navigace. Mode je oznaena aktuální pozice Kruhová zóna zobrazená šedou barvou na obrázku. 19 znázoruje oblast ve vzdálenosti 1m od posledního bodu, který je brán jako aktuální. Body, které padnou do této oblasti, jsou z hlediska zmny pozice ignorovány. I pes na první pohled zejmé pozitivum plynoucí ze zafixování bodu na jednom míst a zamezení zmny smru k cíli je poteba si uvdomit, že pozice, na které je naše poloha zafixována,,nemusí být polohou skutenou. Toto je však skutenost, kterou není možno ve výsledku píliš ovlivnit. Tento problém je do jisté míry odstranitelný výpotem bodu, který je prmrem všech námi v jednom bod namených hodnot. Ovšem tento pístup není pro navigaci dynamicky se pohybujícího objektu nutný, nepedpokládá se totiž, že by objekt zstával po delší dobu na stejném míst Pitažení bodu k ideální cest Z kapitoly vnující se pímo GPS víme, že pesnost, s jakou jsme schopni urit naši pozici, je pímo úmrná potu satelit, ze kterých jsme schopni informaci o poloze získat. V pípad, že je jejich poet malý (kupíkladu 4, 5), je naše pozice znan nepesná. Pedstavme si modelový píklad, kdy víme kde se náš cílový bod nachází (roh pole, strom atd.), a stojíme v rámci navigace pímo na ideální cest mezi dvma cílovými body cesty (pedchozí a nynjší) a vektor našeho pohybu je totožný s vektorem ideální cesty. Pesto nám smrová šipka neukazuje, že je bod pímo ped námi. Tato skutenost mže být zapíinna buto chybou v zamení bodu nebo chybou v urení aktuální pozice. Možností jak tuto situaci vyešit je práv pitahování pozic k ideální cest (obr.21). Pro funknost je poteba stanovit hranici pro kterou jsme ochotni aktuální pozici ješt uvažovat jako 37
38 pozici, která bude pemístna a bude chápána jako pozice nalézající se na ideální cest. Princip fungování je zobrazen na obrázku.21. z.šíka pedchozí cíl [š,d] aktuální pozice [š,d] ideální trasa pedchozí pozice [š,d] aktuální cíl [š,d] z.délka Obrázek. 21 Pitažení na ideální trasu Tato funkce je u bžných navigací využívána pedevším u tch automobilových, a to pro zamaskování chyby protože pedpokládáme že se automobil pohybuje po pedem známé cest (silnici). U typu navigace která je urena pro geografický przkum není tento typ korekce píliš relevantní, zajímá nás totiž naše pozice, nikoliv pozice ideální (zkreslená). Berme tuto funkci tedy pouze jako pomocnou pro pípad, že bychom z dvodu špatného signálu nebyli schopni naši pozici urit natolik pesn, že by tato skutenost již bránila ve sbru dat Predikce pohybu Dalším z problém, který je poteba v rámci navigace ešit ohledn dat poskytovaných GPS pijímaem, je nedostatená rychlost, se kterou jsou data o poloze obnovována. Pijímae standardn poskytují informaci jedenkrát za sekundu, což je hlavn u rychlého pohybu málo. Úhel a vzdálenosti k cíli poskytované uživateli by mli mít pokud možno lineární prbh. Toho je možno dosáhnout za pomoci predikce následné polohy objektu. Víme-li dopedu, kde se budeme v dalším asovém okamžiku nacházet, mžeme si dráhu rozdlit na více ástí a pro každou z nich provést výpoet vzdáleností a úhlu k cíli samostatn. V rámci navigace je krok pro výpoet se zapnutou predikcí pohybu nastaven na 1ms. Z toho plyne, že pro jeden cyklus obnovy pozice za pomoci pijímae jsou hodnoty výstupních informací obnoveny desetkrát. Na obrázku. 22 je znázornna situace pi obnov informací pouze pi využití informací z GPS pijímae na obrázku. 23 pak s použitím predikce pohybu. Úhel odpovídá úhlu k cíli a reprezentuje vzdálenost aktuální pozice a cílového bodu. 38
39 Obrázek. 23 Predikce pohybu vypnuta Obrázek. 24 Predikce pohybu zapnuta 39
40 5 Simulaní nástroj Vzhledem k omezeným možnostem testování aplikace jakou je GPS navigace, je zapotebí vytvoit simulaní nástroj, s jehož pomocí bude možné otestovat její jednotlivé funkce a chování ve všech možných situacích. Cílem je tvorba navigace pro pohybující se objekty, které mají dle zadaných vlastností omezené možnosti pohybu. Z toho pak také musí náš simulaní systém vycházet. Prioritou je otestovat chování systému pro vyšší rychlosti, které není možno v rámci ešení této práce testovat v reálných podmínkách. Pi simulaci vychází systém z pohybových omezení zadaných rychlostí, jakou se objekt pohybuje a polomrem, na kterém je schopen se otoit o 18 vzhledem k dosavadnímu smru pohybu. Simulaní nástroj je souástí navigace a ovládá se stejn, jako bychom chtli provádt navigaci. V pípad, že chceme modifikovat parametry pro navigaci, provádíme tyto zmny pes rozhraní nastavení navigace. Parametry urené pímo pro simulaci jsou nastavovány pímo pes rozhraní simulace. Po vytvoení cesty je spuštna simulace a systém se chová, jako by byla spuštna navigace s tím rozdílem, že body nebere z GPS pijímae a neprovádí predikci, ale dle nastavení aktuální pozici vytváí. 5.1 Stanovení maximální odchylky smru Prvním krokem je stanovení maximálního úhlu, o který se mže v jednom kroku objekt vychýlit. Ten je stanoven na základ schopnosti objektu otoit se o 18 v rámci pohybu. Princip výpotu úhlu maximální odchylky je na obr Je-li hodnota polomru otáení stanovena na m, bere se v úvahu pší chze a maximální odchylka od smru není dána (objekt je schopen v jednom kroku libovoln mnit svj smr). 4
41 z.šíka r d r z.délka Obrázek. 24 Stanovení maximální odchylky smru 5.2 Výpoet souadnic nové pozice Na obrázku.24 znaí r polomr otáení v metrech, d velikost kroku v m/s. Na ¼ obvodu kružnice o polomru r, pedstavující otoení o 9 je vypoítán poet krok, které jsou pro natoení o tuto hodnotu poteba. Úhel pak odpovídá maximální možné odchylce na jednom kroku. Nyní máme stanovenu maximální možnou odchylku a je zapotebí vypoítat následující bod pohybu (následující aktuální bod). K tomu je poteba stejn jako u navigace na cíl, ale tentokrát kolem aktuálního bodu, vytvoit 4 kvadranty. V rámci kvadrant pak stanovujeme hodnotu úhlu dle tabulky.8. Kvadrant úhel Tabulka.8 výpoet úhlu následného bodu, první fáze 41
42 Prvním krokem je výpoet úhlu v rámci kvadrant, který odpovídá následující pozici bodu v pípad, že by nedošlo ke zmn smru. Výsledný úhel je uren vzhledem k podle postavení kvadrant dle tabulky. 9. Nový bod(kvadrant) Tabulka.9 výpoet úhlu následného bodu, druhá fáze Situaci ilustruje obrázek.25. z.šíka 4 1 d následující pozice (pomocná) [š,d] aktuální pozice [š,d] 3 pedchozí pozice [š,d] 2 z.délka Obrázek. 25 výpoet pomocného následujícího bodu 42
43 Nyní využijeme informaci od navigace o velikosti úhlu reprezentujícího odchylku k cíli. Ten buto piteme nebo odeteme od úhlu v závislosti na jeho velikosti a typu cesty po které je navigace provádna (tabulka.1). Zobrazení kvadrant Kvadrant Úhel k cíli () 1 nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo nebo Tabulka.1 zapoítání odchylky k cíli pro výpoet následujícího bodu V pípad, že je požadované odchýlení vtší, než je objekt schopen v rámci svého pohybu provést, je odchylka nahrazena odchylkou vypotenou jako maximální. Tímto zjistíme úhel (obr.. 26) odpovídající odchylce nové dráhy od. 43
44 z.šíka 4 d 1 následující pozice (pomocná) [š,d] cílová pozice[š,d] aktuální pozice [š,d] 3 pedchozí pozice [š,d] 2 z.délka Obrázek. 26 stanovení výsledné odchylky pohybu Posledním krokem je urení úhlu. Velikost úhlu je dána a kvadrantem do kterého spadá (viz tabulka. 11). Poté již mžeme stanovit souadnice nového aktuálního bodu. Nové souadnice jsou dopoítány z aktuálního bodu a vypotených vzdáleností posunutí bodu v zempisné šíce a délce. Situaci demonstruje obrázek íslo
45 z.šíka 4 1 aktuální pozice [š,d] d posun - délka následující aktuální pozice [š,d] cílová pozice[š,d] posun - šíka 3 2 Obrázek. 27 stanovení posunutí nového bodu oproti aktuálnímu z.délka Tabulka.11 stanovení koneného úhlu pro výpoet dalšího bodu pohybu Simulaní nástroj byl vytvoen prvoad pro testování jednotlivých funkních ástí naviganího softwaru, zjišování jejich chyb a nedostatk. Jeho úkolem není provádt simulaci reálných podmínek przkumu, chyb vzniklých v dsledku nepesnosti GPS a podobn. Simulace je provádna pímo v prostedí aplikace a vidíme výstupy jako bychom skuten navigaci používali. Z toho plyne, že krok simulace je implicitn nastaven na 1 sekundu. To je ovšem z pohledu testování nevhodné, proto je umožnno tento krok skrze nastavení simulace mnit. Zmnou je ovlivnna pouze rychlost kterou jsou jednotlivé kroky provedeny, nikoliv rychlost pohybu objektu. 45
46 6 Implementace V této kapitole je nastínna implementace diplomové práce. Jsou zde pedstaveny hlavní tídy, jejich základní metody a jejich struktura. Z metod a promnných jsou vybrány pro každou tídu pouze ty, které jsou z hlediska celkové funknosti nejdležitjší. 6.1 Použité technologie Aplikace je implementována v jazyce C++ s použitím knihovny wxwidgets. To zajišuje její následnou penositelnost mezi operaními systémy Windows a Linux což bylo jedním z požadavk zadání. Knihovna wxwidgets je použita pro vytvoení uživatelského rozhraní aplikace. Další knihovnou použitou pro vytvoení aplikace je knihovna libkalman (The KFilter Project) sloužící k predikci pohybu objektu. Práv vzhledem k odlišnostem mezi systémy Linux a MS Windows bylo poteba vytvoit dva zpsoby tení dat ze sériového portu a drobné modifikace jsou poteba také pro grafickém rozhraní. 6.2 Hlavní funkní prvky navigace, tídy Bod Bod se v navigaci objevuje ve dvou formátech. Prvním formátem je desetinné vyjádení souadnice (dd.fffff), druhým vyjádení souadnice ve stupních. Všechny body, které jsou používány pímo pro navigaci, jsou uloženy ve formátu desetinných ísel, body které jsou vyjádeny ve stupních jsou pouze pro provádní dílích výpot, napíklad pro výpoty vzdáleností. Tída obsluhující práci s body v desetinném vyjádení má následující strukturu. Promnná/metoda Význam zempisná šíka zempisná délka transformovaná z. šíka transformovaná z. délka polokoule S/J polokoule V/Z typ bodu 46
47 Cesta Prvním úkonem potebným pro navigaci je vytvoení cesty. Vytvoení cesty a následná manipulace s ní je obsluhována tídou. Ta obsahuje metody pro vytvoení všech typ cest a datové typy potebné pro její následné uložení vetn typu a ostatních vlastností v rámci programu. Promnná/metoda Význam Vektor obsahující body cesty. Ze zadaného poáteního a cílového bodu stanoví jaký typ cesty budeme vytváet a jakým zpsobem budou souadnice cesty transformovány Je-li vyváena cesta pro naviganí úlohu navigace po ploše, vytvoí ze zadaných údaj cestu pokrývající stanovený prostor. Metoda navazující na CreateJourney( ). V pípad, že je požadavek na vytvoení bod pro otáení v rámci navigace po ploše, rozhodne, jakým smrem budou body pro otáení smrovány, a poté volá metodu CreateRadiusNodes(), která vytvoí již samotné body. Body pro otáení jsou vytvoeny s ohledem na polomr otáení zadaný uživatelem, typ cesty a postavení místa pro otáení v rámci souadného systému. Slouží pro vytvoení jednoduché cesty nebo úsek složené libovolné cesty. Pi vytváení složené libovolné cesty je tato vytvoena po ástech z jednoduchých cest. Protože mže nastat situace, kdy jsou jednotlivé cesty rzných typ, metoda petransformuje souadnice cesty tak, aby na sebe navazovaly. Naviganí funkce Funkce pímo spjaté s navigací jsou obsluhovány tídou. Obsahuje datové struktury pro uchování informací o aktuálním stavu naviganí funkce jako jsou vzdálenosti k cíli a ideální cest, informace o smru k cíli. V rámci ní jsou také implementovány metody pro zlepšení funkce navigace tj. funkce statické navigace a pitažení k ideální trase. Jejím obsahem je také vtšina metod pro pomocné funkce, jakými jsou pevody mezi rznými typy bod, pepoty vzdáleností souadnic na metry a podobn. Následuje seznam hlavních metod potebných pro realizaci urení smru k cíli a výpotu výstupních údaj se struným popisem jejich funkce. 47
48 Promnná/metoda Význam Urení kvadrantu vi cíli. Metoda vyhodnocující zda byl cíl minut. Petransformovaní souadnice podle typu cesty, po které je provádno navigování. Implementace funkce statické navigace. Urení vzdálenosti dvou bod v systému délka-šíka odpovídající vzdálenosti jednoho metru. Kontrola na dosažení cílového bodu. Urení smru k cíli vzhledem k souasnému vektoru pohybu. Pitažení aktuálního bodu k ideální cest. Urí vzdálenost aktuálního bodu k cíli a odchylku od ideální cesty v metrech. Sériový port Tída se stará o píjem dat od GPS pijímae pes sériový port v systémech MS Windows. Obsahuje pouze základní metody umožující navázání spojení, nastavení jeho parametr, tení dat z portu a jeho uzavení. Promnná/metoda Význam Uzavení sériového portu Petení jedné NMEA vty z portu Otevení sériového portu Nastavení parametr spojení Parser Po natení dat ze sériového portu je identifikován druh práv pijaté vty NMEA. V pípad, že je pijatá vta typu GGA, jsou z ní vybrána potebná data o pozici. Vta typu GSA pak obsahuje data o stavu signálu. Metody, kterými je tato innost zajišována, a datové struktury pro uložení práv natených dat jsou souástí tídy TParser. 48
49 Promnná/metoda Význam Stanoví typ vty NMEA petené ze sériového portu. Nate a rozdlí data obsažená ve vt typu GGA. Nate a rozdlí data obsažená ve vt typu GSV. Simulaní nástroj V rámci práce byl implementován jednoduchý simulaní nástroj pro ovení chování naviganího systému. Jeho chod zajišuje tída. Opt pouze rychlý pehled hlavních metod s vysvtlením funkce. Promnná/metoda Význam Vytvoí první krok simulace. Stanovení maximálního úhlu, o který je objekt schopen zmnit v jednom kroku svj smr. Vytvoí další krok pro simulaci. Uživatelské rozhraní Vzhledem k pedpokládaným funkcím systému bude zapotebí vytvoení ty formuláových oken. Hlavní okno obsahuje menu, ze kterého budou pístupny všechny funkní prvky navigace. Tída wxline wxjourney wxsettings wxsimulate wxnavigation Okno Okno pro vytvoení libovolné linie Okno pro vytvoení cesty Okno uživatelského nastavení Okno uživatelského nastavení simulace Hlavní okno aplikace Vstupy, výstupy Vstupní údaje pro nastavení navigace budou uloženy v souboru setup, oddleny vždy novým ádkem v následujícím poadí (jednotka). Rádius otáení(m), tolerance dosažení bodu(m), COM Port, pitažení bodu(m), pitažení bodu(/1), minutí cíle(/1), statická navigace(/1), predikce(/1). Výstupní data umístíme do souboru output.txt ve formátu: zem.šíka(dd.ffff);polokoule(s/j);zem.délka(dd.ffff);polokoule(v/z);cíl->zem.šíka(dd.ffff);cíl- >zem.délka(dd.ffff);úhel k cíli( ); vzdálenost k cíli(m). 49
50 6.3 Kroky pi navigaci, simulovaném provozu Pi standardním spuštním aplikace je zvolena funkce navigace reálný provoz. Spustíme-li aplikaci s parametrem s spouští se aplikace v simulaním módu. Zjednodušená ukázka fungování navigace a simulaní funkce zapsaná v pseudokódu. Nastiuje, jak bude aplikace postupovat pi ešení naviganí úlohy pro mód simulace a navigace. V tabulce.12 jsou popsány píkazy a operátory použité v pseudokódu. Píkaz / operátor Význam Podmínka Zaátek provádní konec provádní Logická spojka "a zárove" Logická spojka "nebo" Tabulka.12 Píkazy a výrazy pseudokódu 5
51 Navigace start navigace if první krok inicializuj navigaci a cestu if pipojeno k pijímai nati nová data z GPS if typ_vty GGA if statická_navigace porovnej prove funkci statické navigace zave nové hodnoty pro body if typ_vty GSV aktualizuj data o signálu zobraz nové hodnoty if predikce predikuj polohu pokej 1ms zavolej funkci poítání a zobrazení predikce if cesta_vytvoena & navigace_spuštna if pitažení bodu porovnej prove funkci pitažení if cíl_dosažen cíl_minut zjisti typ bodu vezmi další cíl pokud existuje if další bod neexistuje -> konec navigace vypoítej úhel k cíli zobraz výstupy pokej 1ms volej funkci navigace end navigace Simulace start simulace if první krok inicializuj simulaci a cestu vytvo pedchozí bod if statická_navigace porovnej prove funkci statické navigace zave nové hodnoty pro body zobraz nové hodnoty if cesta_vytvoena & simulace_spuštna if pitažení bodu porovnej prove funkci pitažení if cíl_dosažen cíl_minut zjisti typ bodu vezmi další cíl pokud existuje if další bod neexistuje -> konec simulace vypoítej úhel k cíli vypoítej nový aktuální bod zobraz výstupy pokej zadaný as a volej funkci simulace end navigace Predikce pohybu start poítání a zobrazení predikce vytvo 1 bod po trajektorii aktuální - predikovaný ber postupn s každým voláním jeden bod if cíl_dosažen cíl_minut zjisti typ bodu vezmi další cíl pokud existuje if další bod neexistuje -> konec navigace vypoítej úhel k cíli zobraz výstupy pokej 1ms volej funkci poítáni a zobrazení predikce end predikce 51
52 6.4 Predikce pohybu Pro predikci pohybu následné pozice objektu je využit Kalmanv filtr. Ten je uren k ešení obecného problému odhadování následného stavu pohybujícího se objektu v diskrétním ase. Stav systému v ase je pro dvojrozmrný prostor reprezentován jako vektor obsahující informace o jeho pozici v ase t [x,y] a rychlosti [dx,dy]. Kalmanv filtr je rekurzivní a pro odhad budoucího stavu nepotebuje znát hodnoty stav pedešlých. Penastavení filtru je provádno s každým novým krokem na základ informace o korekci pedchozího predikovaného stavu stavem skuteným na základ jeho vnitního stavu. Prvním krokem je stanovení vektoru který nám bude reprezentovat aktuální stav systému a nalezení funkce, která popisuje jeho vývoj v ase, x ( t) = f ( x( t 1), w( t 1)) kde w pedstavuje manévrovací šum. x ( t + 1) = x( t) + v( t) Vstupní stav systému pro objekt pohybující se ve dvojrozmrném prostoru tedy mžeme vyjádit jako [ x, dx, y dy] x ( t) =, Poté je poteba nalézt vztah mezi naším vstupním vektorem x a výstupním vektorem, kde v je šum mení. z ( t) = h( x( t 1) + v( t 1)) Po nalezení matematického modelu je dalším krokem výpoet Jacobiho determinantu pro matice A, W, H a V. Matice A je pechodovou maticí stavu a je definována jako A [ i, j] f[ i] =. x [ j] Dále pak matice W, H a V jsou definovány jako W [ i, j] f[ i] =, w [ j] H [ i, j] h[ i] = a V[ x [ j] i, j] h[ i] =. v [ j] V našem pípad: 52
53 53 = A = 1 1 W = 1 1 H = 1 1 V Posledním krokem je stanovení hodnot pro inicializaci kovarianí matice P, manévrovací matice Q a matice R pedstavující šum mení. = P = Q =.1.1 R
54 7 Testování Testování naviganího systému probíhalo ve tech fázích. Práv u testování funknosti softwarového produktu jakým je navigace v podmínkách vývoje diplomové práce, narážíme na problém nemožnosti vyzkoušet ho v plném provozu ve všech situacích. Realita odetu souadnic z GPS je znan odlišná od provádní experiment v rámci simulace a to z dvodu pesnosti mení, která je v reálu ovlivována mnoha faktory. Pesto bylo snahou po testech v simulaních podmínkách, provést testy v provozu reálném, by jen na území eské republiky. 7.1 Testování dílích ástí navigace Prvotním testováním museli projít základní funkce naviganího systému, jakými jsou dosažení cíle, minutí cíle, urení smru k cíli a podobn. Tyto testy byly provádny na známých datech s pedpokládanými výsledky. Cílem test bylo zjistit zda se na tchto datech bude systém chovat dle pedpokladu. Je zejmé, že takovéto testování je poteba u všech typ aplikací, tyto testy však byly provádny hlavn za úelem zajištní toho, aby pi následném testování v reálných podmínkách byla úplná jistota, že pípadné nepesnosti v zobrazování naviganích údaj nejsou zpsobeny chybami v tchto funkcích, ale odchylkami skutených a namených hodnot polohy objektu provádjícího przkum. V pípad, že by se následn u reálných test chyby v urení smr i vzdáleností k cíli projevily, bylo by nasnad uvážit další možnosti pro korekci a zpesnní dat poskytovaných GPS. Osy u grafického zobrazení jsou znaeny ve formátu dd.fffff (souadnice ve stupních + desetinná ást). 7.2 Testování za pomoci simulaního nástroje Pokrytí plochy V rámci testování v reálných podmínkách nebude z dvodu velikosti potebného prostoru možné provést test na pokrytí plochy cestou a její následné projití. Tuto variantu naviganí úlohy tedy provedeme alespo v rámci simulace. Cesta je zadána dvma body. První o souadnicích 5 severní šíky a východní délky, druhý pak 5,695 severní šíky a východní délky. Pro podmínky úlohy je dán rozestup mezi jednotlivými liniemi maximáln 1m minimáln pak 6m. Rozestup daný parametry tvoené cesty je 96m. Rozestup jednotlivých doasných cíl od sebe je dán maximáln 2m, v našem pípad 191m. Na obrázku.28 je navržená cesta oznaena mode, pohyb objektu je vyznaen zelen. Objekt se pohybuje rychlostí 1m/s, polomr jeho otáení je stanoven na 1m. Z toho plyne, že je poteba v rámci cesty vytvoit body pro otáení. 54
55 z.šíka Cílový bod Poátek cesty z.délka Obrázek.28 Navigace po ploše Cesta plochou je vytvoena dle zadaných parametr správn. Je vidt, že body pro otáení jsou navrženy tak, aby pi respektování smru k cíli bylo možno na následující linii cesty navazovat tém plynule. Test této naviganí úlohy dopadl dobe, oekávání byla splnna. 55
56 Ukazatel smru Podívejme se nyní na detailu otáení (obr..29), jak vypadají naviganí údaje o smru k cíli z pohledu uživatele. Koleko s ukazatelem reprezentuje smr, kterým je od nás cíl. Vycházíme-li z pedpokladu, že se pohybujeme vždy dopedu je, pro nás smr pímo k cíli reprezentován tak že ukazatel míí vzhru. erven je vždy oznaen bod, ke kterému se ukazatel vztahuje (aktuální pozice), fialov pak cíl k nmuž chceme být dovedeni. Cesta opt znaena mode, pohyb objektu pak zelen. z.šíka z.délka Obrázek.29 Detail navigace, zobrazení smru Pechod mezi polokoulemi Dalším z pípad, který nelze v reálných podmínkách otestovat, je pechod mezi polokoulemi. Otestujeme tedy chování navigace také v rámci simulaního nástroje. Parametry nastavíme tak, aby 56
57 byl pechod pes rovník ( zempisné šíky) a nultý poledník ( zempisné délky). Cesta nám tak zasahuje do všech ty polokoulí. Body tvoící cestu procházíme v poadí tak, jak jsou oíslovány. Bod jižní šíky,.278 západní délky Bod severní šíky,.278 západní délky Bod severní šíky, západní délky Bod severní šíky,.139 východní délky Bod jižní šíky,.1668 východní délky Parametry pro simulaci jsou nastaveny stejn jako u pedchozí úlohy Obr.3 Navigace po libovolné linii, pechod polokoulí Navigace se opt chová podle pedpokladu. Výsledné urení smr a vzdáleností odpovídá pedpokládaným hodnotám. U tohoto typu cest je poteba pi zadávání zlomových bod uvažovat možnosti dopravního prostedku, hlavn pak z hlediska otáení. V pípad prudkých obrat na malých vzdálenostech pi velkém polomru otáení znemožujeme korektní projití cesty. 57
58 7.3 Testování v reálných podmínkách Testování v reálných podmínkách mlo dva hlavní cíle. Tím prvním bylo samotné ovení funknosti navigace k cíli, tím druhým nemén podstatným pak zkouška tch funkcí navigace, které mají za úkol navigaci vylepšovat. Pílohy.1 a 2 jsou videozáznamy poízené v rámci testování naviganího systému v reálném provozu. Zobrazení smru k cíli Test.1 ml za úkol ovit správnost urení smru k cíli. Na videozáznamu je možno vidt jak se mní smr k cíli v závislosti na pozici, ve které se práv nacházíme. Cíl byl pro tuto testovací úlohu stanoven tak, aby nedošlo v rámci našeho pohybu k jeho dosažení. Následný pohyb ve smru k nmu a od nj nám umožuje sledovat chování navigace. Výsledek je ovlivován použitím predikního algoritmu. Ten není schopen vyrovnat se s tak prudkými zmnami smru jaké byly provádny, a proto mu njakou dobu trvá, než se nový smr k cíli ustálí. Výsledek testu je dobrý. Smr k cíli je zobrazován správn. Test prchodu zadané cesty Záznam testu je piložen jako videozáznam.2. Jedná se o test na dosažení bod, vytvoení cesty a test predikce pohybu. Obrázek.31 ukazuje prbh tohoto testu. Mode je vyobrazena trasa, kterou objekt vykonal pi navigaci. Je vytvoena z bod, které poskytl GPS pijíma, a bod, které vznikly s pomocí predikce pohybu. V místech, kde cesta výraznji mní svj smr, je možné vidt, jak predikní algoritmus odhadoval trasu a následn korekci provedenou podle reálné polohy. V tchto místech je cesta jakoby zubatá. Vidíme však, že ve chvíli, kdy cesta delší dobu udržuje stejný smr, predikní algoritmus funguje dobe a trasa je naprosto rovná. Klikatost výsledné dráhy je zapíinna faktem, že test byl provádn na míst s terénními pekážkami, nebylo tedy možné dodržet trasu ideální. Trasa zaíná v bod jedna, koní pak bodem tyi. Smr pohybu je naznaen šipkami. Cíle testu byly splnny dobe, navigace se chovala podle pedpokladu. 58
59 z.délka z.šíka Obrázek.31 - Prbh testu 59
60 8 Závr Cílem úlohy byl návrh a implementace naviganího systému pro geografické przkumné akce. Prvotním cílem pro ešení naviganí úlohy je její stanovení a to vytvoením cesty, po které bude przkum provádn. Ze zadání úkolu bylo poteba umožnit ešení více typ naviganích úloh, jako navigace po zadané ploše a navigace po libovolné cest. Hlavní komplikací je nutnost ešit problematiku globáln. Setkáváme se tak se situacemi, a to jak pi tvoení cesty tak poté pi samotné navigaci, ve kterých je urení orientace v prostoru problematické. Typickým píkladem je nap. pechody mezi význanými poledníky a rovníkem. Musíme si uvdomit princip, jakým je zem pokryta sítí bod v rámci WGS84. Souadnice s polohou [,] leží v prseíku rovníku a nultého poledníku. Hodnoty souadnic od tohoto bodu ve smru zempisné šíky i zempisné délky vzrstají. Máme-li napíklad naviganí úlohu ešenou na severovýchodní polokouli a s touto úlohou bychom se se stejnými hodnotami souadnic pesunuli na polokouli jihovýchodní, dojde nám k zrcadlovému otoení a tím ke zmn orientace v prostoru (body, které jsme mli v rámci úlohy po pravé ruce, jsou te po levé ). Je proto nároné vytvoit matematický podklad ešící všechny situace, které by mohly nastat. Dalším z cíl práce bylo ešení nkterých problémových vlastností GPS, které nám znemožují dosáhnout dobrých výsledk navigace. Tím hlavním je malá frekvence dat, které jsme schopni jako vstupní informace od GSP pijímae obdržet. Vycházeli bychom pouze z dat, jež jsou nám takto poskytnuta, vstup by nebyl plynulý, což by znan zhoršovalo možnosti dobré navigace. ešením se stala predikce pohybu a pomocí ní umožnné zmenšení rozestupu vstupních dat. Data o aktuální poloze jsou dostupná 1x za sekundu, naproti tomu pijíma poskytuje za tuto dobu data pouze jednou. Navigace byla pi reálném testování schopna dobe urovat smr i vzdálenosti k bodm. Navíc práv díky schopnosti urit svou polohu 1x rychleji než je bžn dostupné, byly naviganí údaje zobrazovány velmi plynule. Z pohledu uživatele tedy navigace pracovala dobe, podle údaj ní zprostedkovaných se dalo naviganí úlohu bezproblémov projít. Protože jsou situace, které pro nás není možné v reálném provozu realizovat, byl vytvoen jednoduchý simulaní nástroj umožující chování naviganího systému vyzkoušet. Co se týe rozšíení stávajícího systému, rezervy spatuji hlavn v uživatelském rozhraní aplikace. Pestože aplikace obsahuje vše, co je pro poteby navigace nutné, mohl by se systém rozšíit o možnost zadávat souadnice pro cestu ve více rzných formátech, popípad o ukládání a naítání cest, aby pro pípad opakování naviganí úlohy nemusela být cesta vytváena znovu. Dalším a zásadnjším rozšíením by mohla být funkce pevedení výsledku naviganí úlohy do grafického zobrazení, formou zobrazení ideální cesty s body a prbh pohybu objektu s možností tento výstup uložit. 6
61 Literatura [1] SICKLE, Jan. Basic GIS Coordinates. Denver(Colorado) : CRC Press, s. ISBN [2] NAVMAN Ltd.. NMEA Reference Manual. [s.l.] : [s.n.], s. Dostupný z WWW: < [3] BUCHAR, Petr. Matematická kartografie peprac. vyd. Praha : VUT Praha, s. ISBN [4] ERMÁK, Pavel, ERVINKOVÁ, Petra. Odmaturuj z matematiky. 1. vyd. [s.l.] : Didaktis, s. Odmaturuj!. ISBN [5] CIOłKOSZ, Andrzej, MISZALSKI, Jerzy. Interpretacja zdjec lotniczych.wydawnictwo Naukowe PWN. Warszawa : [s.n.], s. Pevzat obrázek.1. ISBN [6] Wikiknihy. Geometrie [online]. 23, [cit ]. Dostupný z WWW: < [7] BAYER, Tomáš. On-line kurz matematické kartografie [online]. [28] [cit ]. Dostupný z WWW: < /index_soubory/hlavni_soubory/uvod.html >. [8] U.S Government. Global Positioning System : Serving the World [online]. [2] [cit ]. Dostupný z WWW: < [9] Wikipedia. Global positioning system [online]. 21, 2 January 29 [cit ]. Dostupný z WWW: < [1] Wikipedia. UTM [online]. 21, 15 January 29 [cit ]. Dostupný z WWW: < [11] KOENIG, Andrew, BARBARA, Moo. Rozumíme C++. [s.l.] : Computer Press, s. ISBN [12] Cplusplus.com. Cplusplus.com : The C++ Resources Network [online]. v2.2. c2-29 [cit ]. Dostupný z WWW: < [13] WxWidgets : Cross-Platform GUI Library [online] [cit ]. Dostupný z WWW: < [14] ZALZAL, Vincent. KFilter : Free C++ Extended Kalman Filter Library [online]. 26, February 25th 26 [cit ]. Dostupný z WWW: <kalman.sourceforge.net>. [15] WELCH, Greg, BISHOP, Gary. An Introduction to the Kalman Filter. [s.l.] : [s.n.], s. Dostupný z WWW: < [16] 1 Degrees Latitude [online]. 27 [cit ]. Pevzat obrázek(šíka-délka). Dostupný z WWW: < 61
62 Pílohy Píloha 1 Ukázky uživatelského prostedí. Píloha 2 Videozáznamy z test 2x (piloženy na CD). 62


63 Píloha 1 Hlavní okna navigace a simulaního nástroje



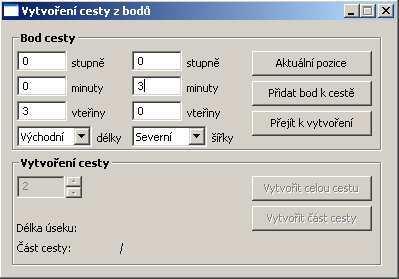
64 Nastavení navigace a simulaního nástroje Vytvoení cesty
2.1 Pokyny k otev eným úlohám. 2.2 Pokyny k uzav eným úlohám. Testový sešit neotvírejte, po kejte na pokyn!
 MATEMATIKA základní úrove obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bod Hranice úspšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. asový limit pro ešení
MATEMATIKA základní úrove obtížnosti DIDAKTICKÝ TEST Maximální bodové hodnocení: 50 bod Hranice úspšnosti: 33 % Základní informace k zadání zkoušky Didaktický test obsahuje 26 úloh. asový limit pro ešení
PRÁCE S GRAFICKÝMI VÝSTUPY SESTAV
 PRÁCE S GRAFICKÝMI VÝSTUPY SESTAV V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - UŽIVATELSKÉ ÚPRAVY GRAFICKÝCH VÝSTUP YAMACO SOFTWARE 2006 1. ÚVODEM Vtšina produkt spolenosti YAMACO Software
PRÁCE S GRAFICKÝMI VÝSTUPY SESTAV V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - UŽIVATELSKÉ ÚPRAVY GRAFICKÝCH VÝSTUP YAMACO SOFTWARE 2006 1. ÚVODEM Vtšina produkt spolenosti YAMACO Software
DOPRAVNÍ INŽENÝRSTVÍ
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MARTIN SMLÝ DOPRAVNÍ INŽENÝRSTVÍ MODUL 4 ÍZENÉ ÚROVOVÉ KIŽOVATKY ÁST 1 STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Dopravní inženýrství
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MARTIN SMLÝ DOPRAVNÍ INŽENÝRSTVÍ MODUL 4 ÍZENÉ ÚROVOVÉ KIŽOVATKY ÁST 1 STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Dopravní inženýrství
PÍRUKA A NÁVODY PRO ÚELY: - RUTINNÍ PRÁCE S DATY
 PÍRUKA A NÁVODY PRO ÚELY: - RUTINNÍ PRÁCE S DATY YAMACO SOFTWARE 2006 1. ÚVODEM Nové verze produkt spolenosti YAMACO Software pinášejí mimo jiné ujednocený pístup k použití urité množiny funkcí, která
PÍRUKA A NÁVODY PRO ÚELY: - RUTINNÍ PRÁCE S DATY YAMACO SOFTWARE 2006 1. ÚVODEM Nové verze produkt spolenosti YAMACO Software pinášejí mimo jiné ujednocený pístup k použití urité množiny funkcí, která
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL KARTOGRAFICKÁ ZKRESLENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL KARTOGRAFICKÁ ZKRESLENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie
GYMNÁZIUM CHEB SEMINÁRNÍ PRÁCE
 GYMNÁZIUM CHEB SEMINÁRNÍ PRÁCE Relace Cheb, 006 Radek HÁJEK Prohlášení Prohlašuji, že jsem seminární práci na téma: Relace vypracoval zcela sám za použití pramen uvedených v piložené bibliograii na poítai
GYMNÁZIUM CHEB SEMINÁRNÍ PRÁCE Relace Cheb, 006 Radek HÁJEK Prohlášení Prohlašuji, že jsem seminární práci na téma: Relace vypracoval zcela sám za použití pramen uvedených v piložené bibliograii na poítai
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KATOGAFIE MODUL 3 KATOGAFICKÉ ZOBAZENÍ STUDIJNÍ OPOY PO STUDIJNÍ POGAMY S KOMBINOVANOU FOMOU STUDIA Matematická kartografie Modul 3
VYSOKÉ UENÍ TECHNICKÉ V BN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KATOGAFIE MODUL 3 KATOGAFICKÉ ZOBAZENÍ STUDIJNÍ OPOY PO STUDIJNÍ POGAMY S KOMBINOVANOU FOMOU STUDIA Matematická kartografie Modul 3
VYTVÁENÍ VÝBROVÝCH DOTAZ
 VYTVÁENÍ VÝBROVÝCH DOTAZ V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - VYTVÁENÍ VÝBROVÝCH SESTAV YAMACO SOFTWARE 2003-2004 1. ÚVODEM Standardní souástí všech produkt Yamaco Software jsou prostedky
VYTVÁENÍ VÝBROVÝCH DOTAZ V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - VYTVÁENÍ VÝBROVÝCH SESTAV YAMACO SOFTWARE 2003-2004 1. ÚVODEM Standardní souástí všech produkt Yamaco Software jsou prostedky
Zamení fasády stavebního objektu
 Zamení fasády stavebního objektu metodou pozemní stereofotogrammetrie - souhrn materiál k projektu OBSAH - technologický postup - poznámky - práce v terénu pehled - poznámky - fotogrammetrické vyhodnocení
Zamení fasády stavebního objektu metodou pozemní stereofotogrammetrie - souhrn materiál k projektu OBSAH - technologický postup - poznámky - práce v terénu pehled - poznámky - fotogrammetrické vyhodnocení
Prbh funkce Jaroslav Reichl, 2006
 rbh funkce Jaroslav Reichl, 6 Vyšetování prbhu funkce V tomto tetu je vzorov vyešeno nkolik úloh na vyšetení prbhu funkce. i ešení úlohy jsou využity základní vlastnosti diferenciálního potu.. ešený píklad
rbh funkce Jaroslav Reichl, 6 Vyšetování prbhu funkce V tomto tetu je vzorov vyešeno nkolik úloh na vyšetení prbhu funkce. i ešení úlohy jsou využity základní vlastnosti diferenciálního potu.. ešený píklad
Správa obsahu ízené dokumentace v aplikaci SPM Vema
 Správa obsahu ízené dokumentace v aplikaci SPM Vema Jaroslav Šmarda, smarda@vema.cz Vema, a. s., www.vema.cz Abstrakt Spolenost Vema patí mezi pední dodavatele informaních systém v eské a Slovenské republice.
Správa obsahu ízené dokumentace v aplikaci SPM Vema Jaroslav Šmarda, smarda@vema.cz Vema, a. s., www.vema.cz Abstrakt Spolenost Vema patí mezi pední dodavatele informaních systém v eské a Slovenské republice.
( ) ( ) 2 2 B A B A ( ) ( ) ( ) B A B A B A
 ( ) 2 2 B A B A ( ) ( ) ( ) B A B A B A") Vzdálenost dvou bod, sted úseky Ž Vzdálenost dvou bod Pi vyšetování vzájemné polohy bod, pímek a rovin lze použít libovolnou vhodn zvolenou soustavu souadnic (afinní). však pi vyšetování metrických vlastností
Vzdálenost dvou bod, sted úseky Ž Vzdálenost dvou bod Pi vyšetování vzájemné polohy bod, pímek a rovin lze použít libovolnou vhodn zvolenou soustavu souadnic (afinní). však pi vyšetování metrických vlastností
Stanovení požadavk protismykových vlastností vozovek s ohledem na nehodovost
 VUT Brno Fakulta stavební Studentská vdecká a odborná innost Akademický rok 2005/2006 Stanovení požadavk protismykových vlastností vozovek s ohledem na nehodovost Jméno a píjmení studenta : Roník, obor
VUT Brno Fakulta stavební Studentská vdecká a odborná innost Akademický rok 2005/2006 Stanovení požadavk protismykových vlastností vozovek s ohledem na nehodovost Jméno a píjmení studenta : Roník, obor
IMPORT DAT Z TABULEK MICROSOFT EXCEL
 IMPORT DAT Z TABULEK MICROSOFT EXCEL V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - IMPORTU DAT DO PÍSLUŠNÉ EVIDENCE YAMACO SOFTWARE 2005 1. ÚVODEM Všechny produkty spolenosti YAMACO Software
IMPORT DAT Z TABULEK MICROSOFT EXCEL V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - IMPORTU DAT DO PÍSLUŠNÉ EVIDENCE YAMACO SOFTWARE 2005 1. ÚVODEM Všechny produkty spolenosti YAMACO Software
LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická
 Stední prmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická Píjmení: Hladna íslo úlohy: 3 Jméno: Jan Datum mení: 10.
Stední prmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická Píjmení: Hladna íslo úlohy: 3 Jméno: Jan Datum mení: 10.
POTRUBNÍ SYSTÉMY PROGRAMU INVENTOR PROFESSIONAL V REALIZACI ISTÍRNY ODPADNÍCH VOD
 Projekt: POTRUBNÍ SYSTÉMY PROGRAMU INVENTOR PROFESSIONAL V REALIZACI ISTÍRNY ODPADNÍCH VOD Objednatel: Computer Agency o.p.s Zhotovitel: Jií Trnka Spoluešitel: Michal Klimeš - 1 - - 2 - OBSAH 1. ÚVOD..4
Projekt: POTRUBNÍ SYSTÉMY PROGRAMU INVENTOR PROFESSIONAL V REALIZACI ISTÍRNY ODPADNÍCH VOD Objednatel: Computer Agency o.p.s Zhotovitel: Jií Trnka Spoluešitel: Michal Klimeš - 1 - - 2 - OBSAH 1. ÚVOD..4
POPIS TESTOVACÍHO PROSTEDÍ 1 ZÁLOŽKA PARSER
 POPIS TESTOVACÍHO PROSTEDÍ Testovací prostedí je navrženo jako tízáložková aplikace, každá záložka obsahuje logicky související funkce. Testovací prostedí obsahuje následující ti záložky: Analýza Gramatiky
POPIS TESTOVACÍHO PROSTEDÍ Testovací prostedí je navrženo jako tízáložková aplikace, každá záložka obsahuje logicky související funkce. Testovací prostedí obsahuje následující ti záložky: Analýza Gramatiky
Autocad ( zdroj www.designtech.cz )
") Autocad ( zdroj www.designtech.cz ) AutoCAD patí k tradiním CAD aplikacím, které využívá celá ada technických i netechnických obor. V dnešním lánku se podíváme na bleskovku, jak lze zaít velmi tychle v
Autocad ( zdroj www.designtech.cz ) AutoCAD patí k tradiním CAD aplikacím, které využívá celá ada technických i netechnických obor. V dnešním lánku se podíváme na bleskovku, jak lze zaít velmi tychle v
Bezpenost dtí v okolí škol z pohledu bezpenostního auditora
 Bezpenost dtí v okolí škol z pohledu bezpenostního auditora Ing. Jaroslav Heinich, HBH Projekt spol. s r.o. pednáška na konferenci Bezpenos dopravy na pozemných komunikáciách 2008 ve Vyhne (SK) ÚVOD Bezpenostní
Bezpenost dtí v okolí škol z pohledu bezpenostního auditora Ing. Jaroslav Heinich, HBH Projekt spol. s r.o. pednáška na konferenci Bezpenos dopravy na pozemných komunikáciách 2008 ve Vyhne (SK) ÚVOD Bezpenostní
L I C H O B Ž N Í K (2 HODINY) ? Co to vlastn lichobžník je? Podívej se napíklad na následující obrázky:
 ? Co to vlastn lichobžník je? Podívej se napíklad na následující obrázky:") L I C H O B Ž N Í K (2 HODINY)? Co to vlastn lichobžník je? Podívej se napíklad na následující obrázky: Na obrázcích je vyobrazena hospodáská budova a židlika, kterou urit mají tvoji rodie na chodb nebo
L I C H O B Ž N Í K (2 HODINY)? Co to vlastn lichobžník je? Podívej se napíklad na následující obrázky: Na obrázcích je vyobrazena hospodáská budova a židlika, kterou urit mají tvoji rodie na chodb nebo
Instalace multiimportu
 Instalace multiimportu 1. Rozbalit archiv multiimportu (nap. pomocí programu Winrar) na disk C:\ Cesta ve výsledném tvaru bude: C:\MultiImport 2. Pejdte do složky Install a spuste soubor Install.bat Poznámka:
Instalace multiimportu 1. Rozbalit archiv multiimportu (nap. pomocí programu Winrar) na disk C:\ Cesta ve výsledném tvaru bude: C:\MultiImport 2. Pejdte do složky Install a spuste soubor Install.bat Poznámka:
MATEMATICKÁ KARTOGRAFIE
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL 5 NEPRAVÁ ZOBRAZENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie Modul
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ MILOSLAV ŠVEC MATEMATICKÁ KARTOGRAFIE MODUL 5 NEPRAVÁ ZOBRAZENÍ STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Matematická kartografie Modul
Definice : Jsou li povrchové pímky kolmé k rovin, vzniká kolmá kruhová válcová plocha a pomocí roviny také kolmý kruhový válec.
 3. EZY NA VÁLCÍCH 3.1. VÁLCOVÁ PLOCHA, VÁLEC Definice : Je dána kružnice k ležící v rovin a pímka a rznobžná s rovinou. Všechny pímky rovnobžné s pímkou a protínající kružnici k tvoí kruhovou válcovou
3. EZY NA VÁLCÍCH 3.1. VÁLCOVÁ PLOCHA, VÁLEC Definice : Je dána kružnice k ležící v rovin a pímka a rznobžná s rovinou. Všechny pímky rovnobžné s pímkou a protínající kružnici k tvoí kruhovou válcovou
Pídavný modul rozvaha lze vyvolat z hlavní nabídky po stisku tlaítka Výkazy / pídavné moduly.
 Výkaz rozvaha Pídavný modul rozvaha lze vyvolat z hlavní nabídky po stisku tlaítka Výkazy / pídavné moduly. Po spuštní modulu se zobrazí základní okno výkazu: V tabulce se zobrazují sloupce výkazu. Ve
Výkaz rozvaha Pídavný modul rozvaha lze vyvolat z hlavní nabídky po stisku tlaítka Výkazy / pídavné moduly. Po spuštní modulu se zobrazí základní okno výkazu: V tabulce se zobrazují sloupce výkazu. Ve
4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL
 4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL Definice : Je dána kružnice k ležící v rovin a mimo ni bod V. Všechny pímky jdoucí bodem V a protínající kružnici k tvoí kruhovou kuželovou plochu. Tyto pímky
4. EZY NA KUŽELÍCH 4.1. KUŽELOVÁ PLOCHA, KUŽEL Definice : Je dána kružnice k ležící v rovin a mimo ni bod V. Všechny pímky jdoucí bodem V a protínající kružnici k tvoí kruhovou kuželovou plochu. Tyto pímky
Proud ní tekutiny v rotující soustav, aneb prozradí nám vír ve výlevce, na které polokouli se nacházíme?
 Veletrh nápad uitel fyziky 10 Proudní tekutiny v rotující soustav, aneb prozradí nám vír ve výlevce, na které polokouli se nacházíme? PAVEL KONENÝ Katedra obecné fyziky pírodovdecké fakulty Masarykovy
Veletrh nápad uitel fyziky 10 Proudní tekutiny v rotující soustav, aneb prozradí nám vír ve výlevce, na které polokouli se nacházíme? PAVEL KONENÝ Katedra obecné fyziky pírodovdecké fakulty Masarykovy
Digitální ortofoto. struná teorie
 Digitální ortofoto struná teorie Hoda J. VII 2004 Obsah 1. Pekreslení leteckých snímk... 2 1.1. Úvod... 2 1.2. Teorie, metody ešení... 2 1.2.1. Pekreslení snímk na pekreslovaích... 2 1.2.2. Diferenciální
Digitální ortofoto struná teorie Hoda J. VII 2004 Obsah 1. Pekreslení leteckých snímk... 2 1.1. Úvod... 2 1.2. Teorie, metody ešení... 2 1.2.1. Pekreslení snímk na pekreslovaích... 2 1.2.2. Diferenciální
Internetový mapový server Karlovarského kraje
 Internetový mapový server Karlovarského kraje Ing.Jií Heliks Karlovarský kraj Závodní 353/88 Karlovy Vary tel.: 353 502 365 e-mail: jiri.heliks@kr-karlovarsky.cz 1. Úvod Vývojem informa,ních systém. a
Internetový mapový server Karlovarského kraje Ing.Jií Heliks Karlovarský kraj Závodní 353/88 Karlovy Vary tel.: 353 502 365 e-mail: jiri.heliks@kr-karlovarsky.cz 1. Úvod Vývojem informa,ních systém. a
Služba Zvýšená servisní podpora
 PÍLOHA 1d Služba Zvýšená servisní podpora SMLOUVY o pístupu k infrastruktue sít spolenosti Telefónica O2 Czech Republic využívající technologie Carrier IP Stream mezi spolenostmi Telefónica O2 Czech Republic,a.s.
PÍLOHA 1d Služba Zvýšená servisní podpora SMLOUVY o pístupu k infrastruktue sít spolenosti Telefónica O2 Czech Republic využívající technologie Carrier IP Stream mezi spolenostmi Telefónica O2 Czech Republic,a.s.
NavAge. Tematický okruh: Personální navigace a lokalizace.
 NavAge Tematický okruh: Personální navigace a lokalizace. Doc. Ing. Jií Chod, CSc., Ing.Jií Svoboda, Pavel Mach, Miroslav Šafránek Systémy GNSS a lokalizace polohy nevidomého Globální družicové naviganí
NavAge Tematický okruh: Personální navigace a lokalizace. Doc. Ing. Jií Chod, CSc., Ing.Jií Svoboda, Pavel Mach, Miroslav Šafránek Systémy GNSS a lokalizace polohy nevidomého Globální družicové naviganí
Související ustanovení ObZ: 66, 290, 1116 až 1157, 1158 a násl., 1223 až 1235, 1694, 1868 odst. 1, 2719, 2721, 2746, 2994, 3055, 3062, 3063,
 Pídatné spoluvlastnictví Obecná ustanovení 1223 (1) Vc náležící spolen nkolika vlastníkm samostatných vcí urených k takovému užívání, že tyto vci vytváejí místn i úelem vymezený celek, a která slouží spolenému
Pídatné spoluvlastnictví Obecná ustanovení 1223 (1) Vc náležící spolen nkolika vlastníkm samostatných vcí urených k takovému užívání, že tyto vci vytváejí místn i úelem vymezený celek, a která slouží spolenému
Pravdpodobnost výskytu náhodné veliiny na njakém intervalu urujeme na základ tchto vztah: f(x)
") NÁHODNÁ VELIINA Náhodná veliina je veliina, jejíž hodnota je jednoznan urena výsledkem náhodného pokusu (je-li tento výsledek dán reálným íslem). Jde o reálnou funkci definovanou na základním prostoru
NÁHODNÁ VELIINA Náhodná veliina je veliina, jejíž hodnota je jednoznan urena výsledkem náhodného pokusu (je-li tento výsledek dán reálným íslem). Jde o reálnou funkci definovanou na základním prostoru
DOPRAVNÍ INŽENÝRSTVÍ
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MARTIN SMLÝ DOPRAVNÍ INŽENÝRSTVÍ MODUL 1 DOPRAVNÍ A PEPRAVNÍ PRZKUMY STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Dopravní inženýrství
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MARTIN SMLÝ DOPRAVNÍ INŽENÝRSTVÍ MODUL 1 DOPRAVNÍ A PEPRAVNÍ PRZKUMY STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU STUDIA Dopravní inženýrství
27. asové, kmitotové a kódové dlení (TDM, FDM, CDM). Funkce a poslání úzkopásmových a širokopásmových sítí.
. Funkce a poslání úzkopásmových a širokopásmových sítí.") Petr Martínek martip2@fel.cvut.cz, ICQ: 303-942-073 27. asové, kmitotové a kódové dlení (TDM, FDM, CDM). Funkce a poslání úzkopásmových a širokopásmových sítí. Multiplexování (sdružování) - jedná se o
Petr Martínek martip2@fel.cvut.cz, ICQ: 303-942-073 27. asové, kmitotové a kódové dlení (TDM, FDM, CDM). Funkce a poslání úzkopásmových a širokopásmových sítí. Multiplexování (sdružování) - jedná se o
Obsah...1 1. Úvod...2 Slovníek pojm...2 2. Popis instalace...3 Nároky na hardware a software...3 Instalace a spouštní...3 Vstupní soubory...3 3.
 Obsah...1 1. Úvod...2 Slovníek pojm...2 2. Popis instalace...3 Nároky na hardware a software...3 Instalace a spouštní...3 Vstupní soubory...3 3. Popis prostedí...4 3.1 Hlavní okno...4 3.1.1 Adresáový strom...4
Obsah...1 1. Úvod...2 Slovníek pojm...2 2. Popis instalace...3 Nároky na hardware a software...3 Instalace a spouštní...3 Vstupní soubory...3 3. Popis prostedí...4 3.1 Hlavní okno...4 3.1.1 Adresáový strom...4
LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická
 Stední prmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická Píjmení: Hladna íslo úlohy: 9 Jméno: Jan Datum mení: 23.
Stední prmyslová škola elektrotechnická a Vyšší odborná škola, Pardubice, Karla IV. 13 LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická Píjmení: Hladna íslo úlohy: 9 Jméno: Jan Datum mení: 23.
WWW poštovní klient s úložištm v MySQL databázi
 eské vysoké uení technické v Praze Fakulta Elektrotechnická Bakaláské práce WWW poštovní klient s úložištm v MySQL databázi Jií Švadlenka Vedoucí práce: Ing. Ivan Halaška Studijní program: Elektrotechnika
eské vysoké uení technické v Praze Fakulta Elektrotechnická Bakaláské práce WWW poštovní klient s úložištm v MySQL databázi Jií Švadlenka Vedoucí práce: Ing. Ivan Halaška Studijní program: Elektrotechnika
Cykly Intermezzo. FOR cyklus
 Cykly Intermezzo Rozhodl jsem se zaadit do série nkolika lánk o základech programování v Delphi/Pascalu malou vsuvku, která nám pomže pochopit principy a zásady pi používání tzv. cykl. Mnoho ástí i jednoduchých
Cykly Intermezzo Rozhodl jsem se zaadit do série nkolika lánk o základech programování v Delphi/Pascalu malou vsuvku, která nám pomže pochopit principy a zásady pi používání tzv. cykl. Mnoho ástí i jednoduchých
Ing. Jaroslav Halva. UDS Fakturace
 UDS Fakturace Modul fakturace výrazn posiluje funknost informaního systému UDS a umožuje bilancování jednotlivých zakázek s ohledem na hodnotu skutených náklad. Navíc optimalizuje vlastní proces fakturace
UDS Fakturace Modul fakturace výrazn posiluje funknost informaního systému UDS a umožuje bilancování jednotlivých zakázek s ohledem na hodnotu skutených náklad. Navíc optimalizuje vlastní proces fakturace
Urení rychlosti svtla Römerovou metodou
 Urení rychlosti svtla Römerovou metodou Informace pro uitele Obtížnost: 4. roník SŠ Cíle: Cílem tohoto cviení je uit rychlost svtla tak, jak ji zmil Olaf Ch. Römer. Studenti si jednak procvií základy planimetrie,
Urení rychlosti svtla Römerovou metodou Informace pro uitele Obtížnost: 4. roník SŠ Cíle: Cílem tohoto cviení je uit rychlost svtla tak, jak ji zmil Olaf Ch. Römer. Studenti si jednak procvií základy planimetrie,
AUTOMATIZACE CHYB OBJEDNÁVKOVÉHO SYSTÉMU AUTOMATION OF ORDERING SYSTEM ERRORS
 VYSOKÉ UENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY FAKULTA PODNIKATELSKÁ ÚSTAV INFORMATIKY FACULTY OF BUSINESS AND MANAGEMENT INSTITUT OF INFORMATICS AUTOMATIZACE CHYB OBJEDNÁVKOVÉHO SYSTÉMU AUTOMATION
VYSOKÉ UENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY FAKULTA PODNIKATELSKÁ ÚSTAV INFORMATIKY FACULTY OF BUSINESS AND MANAGEMENT INSTITUT OF INFORMATICS AUTOMATIZACE CHYB OBJEDNÁVKOVÉHO SYSTÉMU AUTOMATION
Dodatek dokumentace KEO-Moderní kancelá verze 7.40
 Dodatek dokumentace KEO-Moderní kancelá verze 7.40 PODACÍ DENÍK SPIS SBRNÝ ARCH PÍSEMNOST DOKUMENT ÍSLO JEDNACÍ J ODESÍLATELE - Soubor všech jednotlivých DOŠLÝCH a VLASTNÍCH písemností. - Každé písemnosti
Dodatek dokumentace KEO-Moderní kancelá verze 7.40 PODACÍ DENÍK SPIS SBRNÝ ARCH PÍSEMNOST DOKUMENT ÍSLO JEDNACÍ J ODESÍLATELE - Soubor všech jednotlivých DOŠLÝCH a VLASTNÍCH písemností. - Každé písemnosti
ÚSTAV AUTOMATIZACE A MICÍ TECHNIKY Fakulta elektrotechniky a komunikaních technologií Vysoké uení technické v Brn
 1 Obsah: 1. ÚVOD...4 1.1 Obecné použití...4 1.2 Konkrétní použití...5 2. ZPRACOVÁNÍ OBRAZU...7 2.1 Snímání obrazu...8 2.2 Další zpracování...9 2.3 Omezující vlivy...11 2.3.1 Odlesk zdroje svtla na lesklých
1 Obsah: 1. ÚVOD...4 1.1 Obecné použití...4 1.2 Konkrétní použití...5 2. ZPRACOVÁNÍ OBRAZU...7 2.1 Snímání obrazu...8 2.2 Další zpracování...9 2.3 Omezující vlivy...11 2.3.1 Odlesk zdroje svtla na lesklých
Sítání dopravy na silnici II/432 ul. Hulínská Osvoboditel v Kromíži
 Sítání dopravy na silnici II/432 ul. Hulínská Osvoboditel v Kromíži O B S A H : A. ÚVOD Strana 2 B. PÍPRAVA A PROVEDENÍ PRZKUM 1. Rozdlení území na dopravní oblasti 2 2. Metoda smrového przkumu 3 3. Uzávry
Sítání dopravy na silnici II/432 ul. Hulínská Osvoboditel v Kromíži O B S A H : A. ÚVOD Strana 2 B. PÍPRAVA A PROVEDENÍ PRZKUM 1. Rozdlení území na dopravní oblasti 2 2. Metoda smrového przkumu 3 3. Uzávry
METODY OCEOVÁNÍ PODNIKU DEFINICE PODNIKU. Obchodní zákoník 5:
 METODY OCEOVÁNÍ PODNIKU DEFINICE PODNIKU Obchodní zákoník 5: soubor hmotných, jakož i osobních a nehmotných složek podnikání. K podniku náleží vci, práva a jiné majetkové hodnoty, které patí podnikateli
METODY OCEOVÁNÍ PODNIKU DEFINICE PODNIKU Obchodní zákoník 5: soubor hmotných, jakož i osobních a nehmotných složek podnikání. K podniku náleží vci, práva a jiné majetkové hodnoty, které patí podnikateli
Pístupy k informaním systémm
 Pístupy k informaním systémm Edita Šilerová Úvod Vedení firem a organizací jsou si jasn vdoma, že bez podpory informatiky nemohou jejich firmy pežít. Ekonomický a konkurenní tlak je nutí asto k razantním
Pístupy k informaním systémm Edita Šilerová Úvod Vedení firem a organizací jsou si jasn vdoma, že bez podpory informatiky nemohou jejich firmy pežít. Ekonomický a konkurenní tlak je nutí asto k razantním
2. PÍKLAD DÍLÍ ÁSTI SOUSTAVY - DÍLÍ ÁST SDÍLENÍ TEPLA
 2. PÍKLAD DÍLÍ ÁSTI SOUSTAVY - DÍLÍ ÁST SDÍLENÍ TEPLA 2.1. OBECN Tepelné požadavky na dílí ást sdílení tepla zahrnují mimoádné ztráty pláštm budovy zpsobené: nerovnomrnou vnitní teplotou v každé tepelné
2. PÍKLAD DÍLÍ ÁSTI SOUSTAVY - DÍLÍ ÁST SDÍLENÍ TEPLA 2.1. OBECN Tepelné požadavky na dílí ást sdílení tepla zahrnují mimoádné ztráty pláštm budovy zpsobené: nerovnomrnou vnitní teplotou v každé tepelné
Kartografické metody výzkumu a jejich uplatnní v geografii
 Miscellanea Geographica 14 Katedra geografie, ZU v Plzni, 2008 s. 159-168 Kartografické metody výzkumu a jejich uplatnní v geografii Bohuslav Veverka 1, Monika echurová 2 veverka@fsv.cvut.cz, mcechuro@kge.zcu.cz
Miscellanea Geographica 14 Katedra geografie, ZU v Plzni, 2008 s. 159-168 Kartografické metody výzkumu a jejich uplatnní v geografii Bohuslav Veverka 1, Monika echurová 2 veverka@fsv.cvut.cz, mcechuro@kge.zcu.cz
Pedání smny. Popis systémového protokolování. Autor: Ing. Jaroslav Halva V Plzni 24.01.2012. Strana 1/6
 Autor: Ing. Jaroslav Halva V Plzni 24.01.2012 Strana 1/6 Obsah 1 OBSAH... 2 2 NKOLIK SLOV NA ÚVOD... 3 3 MODEL... 3 4 DEFINICE... 3 5 DENNÍ VÝKAZ... 4 6 ZÁVR... 6 Strana 2/6 1 Nkolik slov na úvod Zamení
Autor: Ing. Jaroslav Halva V Plzni 24.01.2012 Strana 1/6 Obsah 1 OBSAH... 2 2 NKOLIK SLOV NA ÚVOD... 3 3 MODEL... 3 4 DEFINICE... 3 5 DENNÍ VÝKAZ... 4 6 ZÁVR... 6 Strana 2/6 1 Nkolik slov na úvod Zamení
UTB ve Zlín, Fakulta aplikované informatiky, 2010 4
 UTB ve Zlín, Fakulta aplikované informatiky, 2010 4 ABSTRAKT Elektronická fakturace je zaínajícím fenoménem moderní doby. Její pehlednost, návaznost na jiné systémy a informace, jednoduchost a ekonomická
UTB ve Zlín, Fakulta aplikované informatiky, 2010 4 ABSTRAKT Elektronická fakturace je zaínajícím fenoménem moderní doby. Její pehlednost, návaznost na jiné systémy a informace, jednoduchost a ekonomická
Píkazy pro kreslení.
 Píkazy pro kreslení. Tento text je psán pro AUTOCAD 2006, eskou modifikaci. V jiných verzích se proto vyskytnou odchylky. Jsou to píkazy, které umožují nakreslit jednotlivé entity v AUTOCADu. Z menu je
Píkazy pro kreslení. Tento text je psán pro AUTOCAD 2006, eskou modifikaci. V jiných verzích se proto vyskytnou odchylky. Jsou to píkazy, které umožují nakreslit jednotlivé entity v AUTOCADu. Z menu je
Prostedky automatického ízení
 VŠB-TU Ostrava 2006/2007 Prostedky automatického ízení Úloha. 5 Hierarchická struktura ízení Meno dne: 25.4.2007 Vypracoval: Petr Osadník Spolupracoval: Petr Ševík Zadání 1. Seznamte se s dílími pracovišti
VŠB-TU Ostrava 2006/2007 Prostedky automatického ízení Úloha. 5 Hierarchická struktura ízení Meno dne: 25.4.2007 Vypracoval: Petr Osadník Spolupracoval: Petr Ševík Zadání 1. Seznamte se s dílími pracovišti
Zbytky zákaznického materiálu
 Autoi: V Plzni 31.08.2010 Obsah ZBYTKOVÝ MATERIÁL... 3 1.1 Materiálová žádanka na peskladnní zbytk... 3 1.2 Skenování zbytk... 7 1.3 Vývozy zbytk ze skladu/makulatura... 7 2 1 Zbytkový materiál V souvislosti
Autoi: V Plzni 31.08.2010 Obsah ZBYTKOVÝ MATERIÁL... 3 1.1 Materiálová žádanka na peskladnní zbytk... 3 1.2 Skenování zbytk... 7 1.3 Vývozy zbytk ze skladu/makulatura... 7 2 1 Zbytkový materiál V souvislosti
ORACLE MANUFACTURING SCHEDULING ORACLE HLAVNÍ PLÁNOVÁNÍ VÝROBY
 ORACLE MANUFACTURING SCHEDULING ORACLE HLAVNÍ PLÁNOVÁNÍ VÝROBY KLÍOVÉ FUNKCE ORACLE MANUFACTURING SCHEDULING Píprava pedpovdí Parametry plánu finální výroby Plánování materiálových požadavk Pracovní plocha
ORACLE MANUFACTURING SCHEDULING ORACLE HLAVNÍ PLÁNOVÁNÍ VÝROBY KLÍOVÉ FUNKCE ORACLE MANUFACTURING SCHEDULING Píprava pedpovdí Parametry plánu finální výroby Plánování materiálových požadavk Pracovní plocha
1 KOMBINATORIKA, KLASICKÁ PRAVDPODOBNOST
 1 KOMBINATORIKA, KLASICKÁ PRAVDPODOBNOST Kombinatorické pravidlo o souinu Poet všech uspoádaných k-tic, jejichž první len lze vybrat n 1 zpsoby, druhý len po výbru prvního lenu n 2 zpsoby atd. až k-tý
1 KOMBINATORIKA, KLASICKÁ PRAVDPODOBNOST Kombinatorické pravidlo o souinu Poet všech uspoádaných k-tic, jejichž první len lze vybrat n 1 zpsoby, druhý len po výbru prvního lenu n 2 zpsoby atd. až k-tý
ORACLE ÍZENÍ VÝROBY ORACLE WORK IN PROCESS KLÍOVÉ FUNKCE ORACLE WORK IN PROCESS
 ORACLE WORK IN PROCESS ORACLE ÍZENÍ VÝROBY KLÍOVÉ FUNKCE ORACLE WORK IN PROCESS Definice standardních výrobních píkaz Definice výrobních rozvrh pro libovolný zvolený interval Definice výrobních píkaz koncové
ORACLE WORK IN PROCESS ORACLE ÍZENÍ VÝROBY KLÍOVÉ FUNKCE ORACLE WORK IN PROCESS Definice standardních výrobních píkaz Definice výrobních rozvrh pro libovolný zvolený interval Definice výrobních píkaz koncové
Efektivní hodnota proudu a nap tí
 Peter Žilavý: Efektivní hodnota proudu a naptí Efektivní hodnota proudu a naptí Peter Žilavý Katedra didaktiky fyziky MFF K Praha Abstrakt Píspvek experimentáln objasuje pojem efektivní hodnota stídavého
Peter Žilavý: Efektivní hodnota proudu a naptí Efektivní hodnota proudu a naptí Peter Žilavý Katedra didaktiky fyziky MFF K Praha Abstrakt Píspvek experimentáln objasuje pojem efektivní hodnota stídavého
Elcometer 6075/1 SP 60
 Elcometer 6075/1 SP 60 Jednoúhlový, runí spektrální fotometr pro kontrolu kvality Tento spektrofotometr poskytuje rychlé a precizní barevné informace o celé ad materiál od papíru, práškových a nátrových
Elcometer 6075/1 SP 60 Jednoúhlový, runí spektrální fotometr pro kontrolu kvality Tento spektrofotometr poskytuje rychlé a precizní barevné informace o celé ad materiál od papíru, práškových a nátrových
TopoL sbr bod pro AAT
 TopoL sbr bod pro AAT technologický postup Jindich Hoda Ph.D. únor 2005 Pi práci v SW TopoL se budete pi sbru bod pro aerotriangulaci ídit následujícím pracovním postupem, viz obrázek 1. Obr. 1 pracovní
TopoL sbr bod pro AAT technologický postup Jindich Hoda Ph.D. únor 2005 Pi práci v SW TopoL se budete pi sbru bod pro aerotriangulaci ídit následujícím pracovním postupem, viz obrázek 1. Obr. 1 pracovní
R O V N O B Ž N Í K (2 HODINY)
") R O V N O B Ž N Í K (2 HODINY)? Co to vlastn rovnobžník je? Na obrázku je dopravní znaka, která íká, že vzdálenost k železninímu pejezdu je 1 m (dva pruhy, jeden pruh pedstavuje vzdálenost 80 m): Pozorn
R O V N O B Ž N Í K (2 HODINY)? Co to vlastn rovnobžník je? Na obrázku je dopravní znaka, která íká, že vzdálenost k železninímu pejezdu je 1 m (dva pruhy, jeden pruh pedstavuje vzdálenost 80 m): Pozorn
! " # $ % # & ' ( ) * + ), -
 * + ), -") ! " # $ % # & ' ( ) * + ), - INDIVIDUÁLNÍ VÝUKA MATEMATIKA METODIKA Kuželosek Mgr. Petra Dunovská bezen 9 Obtížnost této kapitol matematik je dána tím, že se pi výkladu i ešení úloh komplexn vužívají vdomosti
! " # $ % # & ' ( ) * + ), - INDIVIDUÁLNÍ VÝUKA MATEMATIKA METODIKA Kuželosek Mgr. Petra Dunovská bezen 9 Obtížnost této kapitol matematik je dána tím, že se pi výkladu i ešení úloh komplexn vužívají vdomosti
ORACLE DISCRETE MANUFACTURING ORACLE DISKRÉTNÍ VÝROBA
 ORACLE DISCRETE MANUFACTURING ORACLE DISKRÉTNÍ VÝROBA KLÍOVÉ FUNKCE ORACLE DISCRETE MANUFACTURING Definice výrobních píkaz Definice výrobních rozvrh ízení zakázkové výroby ízení sériové výroby ízení hromadné
ORACLE DISCRETE MANUFACTURING ORACLE DISKRÉTNÍ VÝROBA KLÍOVÉ FUNKCE ORACLE DISCRETE MANUFACTURING Definice výrobních píkaz Definice výrobních rozvrh ízení zakázkové výroby ízení sériové výroby ízení hromadné
SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUKÁZKAMI
 SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUKÁZKAMI uzavená podle 269 odst. 2 Obchodního zákoníku mezi tmito smluvními stranami (dále jen smlouva ): Sodexo Pass eská Republika a.s., se sídlem Radlická 2,
SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUKÁZKAMI uzavená podle 269 odst. 2 Obchodního zákoníku mezi tmito smluvními stranami (dále jen smlouva ): Sodexo Pass eská Republika a.s., se sídlem Radlická 2,
Vysoká škola báská Technická univerzita Ostrava Institut geoinformatiky. Analýza dojíždní z dotazníkového šetení v MSK. Semestrální projekt
 Vysoká škola báská Technická univerzita Ostrava Institut geoinformatiky Analýza dojíždní z dotazníkového šetení v MSK Semestrální projekt 18.1.2007 GN 262 Barbora Hejlková 1 OBSAH OBSAH...2 ZADÁNÍ...3
Vysoká škola báská Technická univerzita Ostrava Institut geoinformatiky Analýza dojíždní z dotazníkového šetení v MSK Semestrální projekt 18.1.2007 GN 262 Barbora Hejlková 1 OBSAH OBSAH...2 ZADÁNÍ...3
MATEMATIKA MATEMATIKA
 PRACOVNÍ MATERIÁLY PRACOVNÍ MATERIÁLY MATEMATIKA MATEMATIKA Struktura vyuovací hodiny Metodický Struktura vyuovací list aplikace hodiny Ukázková Metodický hodina list aplikace materiál Záznamový Ukázková
PRACOVNÍ MATERIÁLY PRACOVNÍ MATERIÁLY MATEMATIKA MATEMATIKA Struktura vyuovací hodiny Metodický Struktura vyuovací list aplikace hodiny Ukázková Metodický hodina list aplikace materiál Záznamový Ukázková
VALIDACE ZÁZNAMU ZRYCHLENÍ VOZIDLA PI ROZJEZDU A BRZDNÍ. T. Rochla
 VALIDACE ZÁZNAMU ZRYCHLENÍ VOZIDLA PI ROZJEZDU A BRZDNÍ T. Rochla 2008 Úvod Pi mení pohybových parametr vozidel a poetní rekonstrukci zbývajících veliin dochází k numerickým nepesnostem ovlivnním innosti
VALIDACE ZÁZNAMU ZRYCHLENÍ VOZIDLA PI ROZJEZDU A BRZDNÍ T. Rochla 2008 Úvod Pi mení pohybových parametr vozidel a poetní rekonstrukci zbývajících veliin dochází k numerickým nepesnostem ovlivnním innosti
SBÍRKA PEDPIS ESKÉ REPUBLIKY
 Stránka. 1 z 10 Roník 2006 SBÍRKA PEDPIS ESKÉ REPUBLIKY PROFIL PEDPISU: itul pedpisu: Vyhláška o podmínkách pipojení k elektrizaní soustav Citace: 51/2006 Sb. ástka: 23/2006 Sb. Na stran (od-do): 718-729
Stránka. 1 z 10 Roník 2006 SBÍRKA PEDPIS ESKÉ REPUBLIKY PROFIL PEDPISU: itul pedpisu: Vyhláška o podmínkách pipojení k elektrizaní soustav Citace: 51/2006 Sb. ástka: 23/2006 Sb. Na stran (od-do): 718-729
Role a integrace HR systém
 Role a integrace HR systém Ing. Michal Máel, CSc., Ing. Bc. Jaroslav Šmarda Vema, a. s. Okružní 3a 638 00 Brno macel@vema.cz, smarda@vema.cz Abstrakt Postavení systému ízení lidských zdroj (HR systému)
Role a integrace HR systém Ing. Michal Máel, CSc., Ing. Bc. Jaroslav Šmarda Vema, a. s. Okružní 3a 638 00 Brno macel@vema.cz, smarda@vema.cz Abstrakt Postavení systému ízení lidských zdroj (HR systému)
DISKRÉTNÍ FOURIEROVA TRANSFORMACE P I NELINEÁRNÍ ULTRAZVUKOVÉ SPEKTROSKOPII
 DISKRÉTNÍ FOURIEROVA TRANSFORMACE PI NELINEÁRNÍ ULTRAZVUKOVÉ SPEKTROSKOPII Luboš PAZDERA *, Jaroslav SMUTNÝ **, Marta KOENSKÁ *, Libor TOPOLÁ *, Jan MARTÍNEK *, Miroslav LUÁK *, Ivo KUSÁK * Vysoké uení
DISKRÉTNÍ FOURIEROVA TRANSFORMACE PI NELINEÁRNÍ ULTRAZVUKOVÉ SPEKTROSKOPII Luboš PAZDERA *, Jaroslav SMUTNÝ **, Marta KOENSKÁ *, Libor TOPOLÁ *, Jan MARTÍNEK *, Miroslav LUÁK *, Ivo KUSÁK * Vysoké uení
Základní pojmy klasického sudoku hlavolamu. Techniky odkrývání bunk. Technika Naked Single. Technika Hidden Single
 Základní pojmy klasického sudoku hlavolamu Sudoku hlavolam (puzzle) obsahuje celkem 81 bunk (cells), devt vodorovných ádk (rows), devt svislých sloupc (columns) a devt skupin po 3 3 bukách nazývaných bloky
Základní pojmy klasického sudoku hlavolamu Sudoku hlavolam (puzzle) obsahuje celkem 81 bunk (cells), devt vodorovných ádk (rows), devt svislých sloupc (columns) a devt skupin po 3 3 bukách nazývaných bloky
EVROPSKÁ ÚMLUVA O DOBROVOLNÉM KODEXU O POSKYTOVÁNÍ PEDSMLUVNÍCH INFORMACÍCH SOUVISEJÍCÍCH S ÚVRY NA BYDLENÍ (dále jen ÚMLUVA )
") PRACOVNÍ PEKLAD PRO POTEBY BA 01/08/2005 EVROPSKÁ ÚMLUVA O DOBROVOLNÉM KODEXU O POSKYTOVÁNÍ PEDSMLUVNÍCH INFORMACÍCH SOUVISEJÍCÍCH S ÚVRY NA BYDLENÍ (dále jen ÚMLUVA ) Tato Úmluva byla sjednána mezi Evropskými
PRACOVNÍ PEKLAD PRO POTEBY BA 01/08/2005 EVROPSKÁ ÚMLUVA O DOBROVOLNÉM KODEXU O POSKYTOVÁNÍ PEDSMLUVNÍCH INFORMACÍCH SOUVISEJÍCÍCH S ÚVRY NA BYDLENÍ (dále jen ÚMLUVA ) Tato Úmluva byla sjednána mezi Evropskými
GYMNÁZIUM CHEB. SEMINÁRNÍ PRÁCE Grafy funkcí sbírka ešených úloh. Radek HÁJEK, 8.A Radka JIROUŠKOVÁ, 8.A Cheb, 2006 Petr NEJTEK, 8.
 GYMNÁZIUM CHEB SEMINÁRNÍ PRÁCE Grafy funkcí sbírka ešených úloh Radek HÁJEK, 8.A Radka JIROUŠKOVÁ, 8.A Cheb, 006 Petr NEJTEK, 8.A Prohlášení Prohlašujeme, že jsme seminární práci na téma: Grafy funkcí
GYMNÁZIUM CHEB SEMINÁRNÍ PRÁCE Grafy funkcí sbírka ešených úloh Radek HÁJEK, 8.A Radka JIROUŠKOVÁ, 8.A Cheb, 006 Petr NEJTEK, 8.A Prohlášení Prohlašujeme, že jsme seminární práci na téma: Grafy funkcí
íslo jednací: /14 íslo žádosti: Dvod vydání Vyjádení : Stavební ízení
 VYJÁDENÍ O EXISTENCI SÍT ELEKTRONICKÝCH KOMUNIKACÍ A VŠEOBECNÉ PODMÍNKY OCHRANY SÍT ELEKTRONICKÝCH KOMUNIKACÍ SPOLENOSTI O2 CZECH REPUBLIC A.S. vydané podle 101 zákona. 127/2005 Sb., o elektronických komunikacích
VYJÁDENÍ O EXISTENCI SÍT ELEKTRONICKÝCH KOMUNIKACÍ A VŠEOBECNÉ PODMÍNKY OCHRANY SÍT ELEKTRONICKÝCH KOMUNIKACÍ SPOLENOSTI O2 CZECH REPUBLIC A.S. vydané podle 101 zákona. 127/2005 Sb., o elektronických komunikacích
2. M ení t ecích ztrát na vodní trati
 2. M ení t ecích ztrát na vodní trati 2. M ení t ecích ztrát na vodní trati 2.1. Úvod P i proud ní skute ných tekutin vznikají následkem viskozity t ecí odpory, tj. síly, které p sobí proti pohybu ástic
2. M ení t ecích ztrát na vodní trati 2. M ení t ecích ztrát na vodní trati 2.1. Úvod P i proud ní skute ných tekutin vznikají následkem viskozity t ecí odpory, tj. síly, které p sobí proti pohybu ástic
VYHODNOCENÍ ODCHYLEK A CLEARING TDD V CS OTE JAROSLAV HODÁNEK, OTE A.S.
 OTE, a.s. VYHODNOCENÍ ODCHYLEK A CLEARING TDD V CS OTE JAROSLAV HODÁNEK, OTE A.S. 16.-17.4.2014 Trendy elektroenergetiky v evropském kontextu, Špindlerv Mlýn Základní innosti OTE 2 Organizování krátkodobého
OTE, a.s. VYHODNOCENÍ ODCHYLEK A CLEARING TDD V CS OTE JAROSLAV HODÁNEK, OTE A.S. 16.-17.4.2014 Trendy elektroenergetiky v evropském kontextu, Špindlerv Mlýn Základní innosti OTE 2 Organizování krátkodobého
Využití internetového mapového serveru v informaním systému Karlovarského kraje
 Využití internetového mapového serveru v informaním systému Karlovarského kraje Úvod Nebývalý rozmach a vývoj informaních systém (IS) a pedevším geografických informaních systém (GIS), které postupn' získaly
Využití internetového mapového serveru v informaním systému Karlovarského kraje Úvod Nebývalý rozmach a vývoj informaních systém (IS) a pedevším geografických informaních systém (GIS), které postupn' získaly
Základy MIDI komunikace
 Propojení nástroje a poítae Základy MIDI komunikace MIDI IN, OUT, THRU Možností, jak pipojit klávesy k poítai je hned nkolik. Stále nejrozšíenjší porty pro MIDI komunikaci u kláves jsou klasické MIDI IN
Propojení nástroje a poítae Základy MIDI komunikace MIDI IN, OUT, THRU Možností, jak pipojit klávesy k poítai je hned nkolik. Stále nejrozšíenjší porty pro MIDI komunikaci u kláves jsou klasické MIDI IN
! " " # ( '&! )'& "#!$ %&!%%&! '() '& *!%+$, - &./,,*% 0, " &
'& #!$ %&!%%&! '() '& *!%+$, - &./,,*% 0, &") ! " " # $!%& '& ( '&! )'& "#!$ %&!%%&! '() '& *!%+$, - $!%& &./,,*% 0, *+& 1"% " & Úvod... 3 Metodologie sbru dat k vyhodnocení tezí a ke zpracování analýzy... 5 Analýza dokumentu... 5 Dotazník... 6 ízené
! " " # $!%& '& ( '&! )'& "#!$ %&!%%&! '() '& *!%+$, - $!%& &./,,*% 0, *+& 1"% " & Úvod... 3 Metodologie sbru dat k vyhodnocení tezí a ke zpracování analýzy... 5 Analýza dokumentu... 5 Dotazník... 6 ízené
NEWTONOVY POHYBOVÉ ZÁKONY
 NEWTONOVY POHYBOVÉ ZÁKONY Metodika Mgr. Michal Schovánek kvten 2010 Newtonovy pohybové zákony patí mezi nejobtížnjší kapitoly stedoškolské mechaniky. Popisované situace jsou sice jednoduše demonstrovatelné,
NEWTONOVY POHYBOVÉ ZÁKONY Metodika Mgr. Michal Schovánek kvten 2010 Newtonovy pohybové zákony patí mezi nejobtížnjší kapitoly stedoškolské mechaniky. Popisované situace jsou sice jednoduše demonstrovatelné,
KONCEPCE VEDENÍ A ÚDRŽBY DIGITÁLNÍHO SOUBORU GEODETICKÝCH INFORMACÍ. Václav ada 1
 1 KONCEPCE VEDENÍ A ÚDRŽBY DIGITÁLNÍHO SOUBORU GEODETICKÝCH INFORMACÍ CONCEPT OF MAINTENANCE AND UPDATING OF DIGITAL FILE OF GEODETIC INFORMATION Václav ada 1 Abstract It is necessary to finish up the
1 KONCEPCE VEDENÍ A ÚDRŽBY DIGITÁLNÍHO SOUBORU GEODETICKÝCH INFORMACÍ CONCEPT OF MAINTENANCE AND UPDATING OF DIGITAL FILE OF GEODETIC INFORMATION Václav ada 1 Abstract It is necessary to finish up the
Z 1862 / 07. Výroková ást zmny: A. základní údaje
 Výroková ást zmny: Z 1862 / 07 A. základní údaje íslo zmny: Z 1862 / 07 Mstská ást: Praha 22 Katastrální území: Pitkovice Parcelní íslo: v lokalit pi hranici M Praha 22 a Praha Keslice, západn od ulice
Výroková ást zmny: Z 1862 / 07 A. základní údaje íslo zmny: Z 1862 / 07 Mstská ást: Praha 22 Katastrální území: Pitkovice Parcelní íslo: v lokalit pi hranici M Praha 22 a Praha Keslice, západn od ulice
Promnné. [citováno z
 Promnné [citováno z http://wraith.iglu.cz/python/index.php] Abychom s datovým objektem mohli v programu njak rozumn pracovat, potebujeme se na nj njakým zpsobem odkázat. Potebujeme Pythonu íct, aby napíklad
Promnné [citováno z http://wraith.iglu.cz/python/index.php] Abychom s datovým objektem mohli v programu njak rozumn pracovat, potebujeme se na nj njakým zpsobem odkázat. Potebujeme Pythonu íct, aby napíklad
SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUKÁZKAMI
 SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUÁZAMI uzavená podle 269 odst. 2 Obchodního zákoníku mezi tmito smluvními stranami (dále jen smlouva ): Sodexo Pass eská Republika a.s., se sídlem Radlická 2, 150
SMLOUVA. O SPOLUPRÁCI PI ÚHRAD SLUŽEB POUÁZAMI uzavená podle 269 odst. 2 Obchodního zákoníku mezi tmito smluvními stranami (dále jen smlouva ): Sodexo Pass eská Republika a.s., se sídlem Radlická 2, 150
9. Kombinatorika, pravd podobnost a statistika
 9. Kombinatorika, pravdpodobnost a statistika VÝCHOZÍ TEXT K ÚLOZE 1 V kódu je na prvním míst jedno z písmen A, B, C nebo D. Na dalších dvou pozicích je libovolné dvojciferné íslo od 11 do 45. (Existují
9. Kombinatorika, pravdpodobnost a statistika VÝCHOZÍ TEXT K ÚLOZE 1 V kódu je na prvním míst jedno z písmen A, B, C nebo D. Na dalších dvou pozicích je libovolné dvojciferné íslo od 11 do 45. (Existují
Obr. 1: Elektromagnetická vlna
 svtla Svtlo Z teorie elektromagnetického pole již víte, že svtlo patí mezi elektromagnetická vlnní, a jako takové tedy má dv složky: elektrickou složku, kterou pedstavuje vektor intenzity elektrického
svtla Svtlo Z teorie elektromagnetického pole již víte, že svtlo patí mezi elektromagnetická vlnní, a jako takové tedy má dv složky: elektrickou složku, kterou pedstavuje vektor intenzity elektrického
Pedmt úpravy. Vymezení pojm
 372/2001 Sb. VYHLÁŠKA Ministerstva pro místní rozvoj ze dne 12. íjna 2001, kterou se stanoví pravidla pro rozútování náklad na tepelnou energii na vytápní a náklad na poskytování teplé užitkové vody mezi
372/2001 Sb. VYHLÁŠKA Ministerstva pro místní rozvoj ze dne 12. íjna 2001, kterou se stanoví pravidla pro rozútování náklad na tepelnou energii na vytápní a náklad na poskytování teplé užitkové vody mezi
Soudní exekutor JUDr. Vít Novozámský Bratislavská 40/ Brno k.j. 056 EX 9379/10-46
 ZNALECKÝ POSUDEK. 3158-87/12 o cen nemovitostí - pozemk p.. 6946/8, 6946/10, 6946/22, 6946/23 a 6946/24, k.ú. Domašov u Jeseníka, obec Blá pod Praddem, okres Jeseník, kraj Olomoucký. Objednatel: Exekutorský
ZNALECKÝ POSUDEK. 3158-87/12 o cen nemovitostí - pozemk p.. 6946/8, 6946/10, 6946/22, 6946/23 a 6946/24, k.ú. Domašov u Jeseníka, obec Blá pod Praddem, okres Jeseník, kraj Olomoucký. Objednatel: Exekutorský
Zajišujeme: 595 626 026 office@vtsmorava.cz Gajdošova 61/3154, 702 00 Ostrava
 Spolenost VTS Morava s.r.o. se sídlem v Ostrav vznikla 15.7.2002 pemnou fyzické osoby, psobící na trhu od roku 1997, na spolenost s ruením omezeným. Cílem spolenosti je od samého poátku specializace na
Spolenost VTS Morava s.r.o. se sídlem v Ostrav vznikla 15.7.2002 pemnou fyzické osoby, psobící na trhu od roku 1997, na spolenost s ruením omezeným. Cílem spolenosti je od samého poátku specializace na
Každý datový objekt Pythonu má minimáln ti vlastnosti. Identitu, datový typ a hodnotu.
 Datový objekt [citováno z http://wraith.iglu.cz/python/index.php] Každý datový objekt Pythonu má minimáln ti vlastnosti. Identitu, datový typ a hodnotu. Identita Identita datového objektu je jedinený a
Datový objekt [citováno z http://wraith.iglu.cz/python/index.php] Každý datový objekt Pythonu má minimáln ti vlastnosti. Identitu, datový typ a hodnotu. Identita Identita datového objektu je jedinený a
EXPORT DAT TABULEK V MÍŽKÁCH HROMADNÉHO PROHLÍŽENÍ
 EXPORT DAT TABULEK V MÍŽKÁCH HROMADNÉHO PROHLÍŽENÍ V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - EXPORTU DAT DO EXTERNÍCH FORMÁT YAMACO SOFTWARE 2005 1. ÚVODEM Všechny produkty spolenosti YAMACO
EXPORT DAT TABULEK V MÍŽKÁCH HROMADNÉHO PROHLÍŽENÍ V PRODUKTECH YAMACO SOFTWARE PÍRUKA A NÁVODY PRO ÚELY: - EXPORTU DAT DO EXTERNÍCH FORMÁT YAMACO SOFTWARE 2005 1. ÚVODEM Všechny produkty spolenosti YAMACO
VYSOKÉ U ENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY
 VYSOKÉ UENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DEVNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES OCELOVÁ KONSTRUKCE LÁVKY
VYSOKÉ UENÍ TECHNICKÉ V BRN BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STAVEBNÍ ÚSTAV KOVOVÝCH A DEVNÝCH KONSTRUKCÍ FACULTY OF CIVIL ENGINEERING INSTITUTE OF METAL AND TIMBER STRUCTURES OCELOVÁ KONSTRUKCE LÁVKY
1. MODELY A MODELOVÁNÍ. as ke studiu: 30 minut. Cíl: Po prostudování této kapitoly budete umt: Výklad. 1.1. Model
 1. MODELY A MODELOVÁNÍ as ke studiu: 30 minut Cíl: Po prostudování této kapitoly budete umt: charakterizovat model jako nástroj pro zobrazení skutenosti popsat proces modelování provést klasifikaci základních
1. MODELY A MODELOVÁNÍ as ke studiu: 30 minut Cíl: Po prostudování této kapitoly budete umt: charakterizovat model jako nástroj pro zobrazení skutenosti popsat proces modelování provést klasifikaci základních
Univerzální ovlada LP20 DÁLKOVÝ OVLADA S MOŽNOSTÍ UENÍ SE OD PVODNÍCH OVLADA
 Univerzální ovlada LP20 DÁLKOVÝ OVLADA S MOŽNOSTÍ UENÍ SE OD PVODNÍCH OVLADA NÁVOD K OBSLUZE Výhradní dovozce pro R (kontakt): Bohumil Veselý - VES Tšínská 204 Albrechtice, 735 43 I: 44750498 DI: CZ-6812261016
Univerzální ovlada LP20 DÁLKOVÝ OVLADA S MOŽNOSTÍ UENÍ SE OD PVODNÍCH OVLADA NÁVOD K OBSLUZE Výhradní dovozce pro R (kontakt): Bohumil Veselý - VES Tšínská 204 Albrechtice, 735 43 I: 44750498 DI: CZ-6812261016
Metodický materiál Ma
 Metodický materiál Ma Metodický materiál Ma... 1 Úvod... 2 Možnosti použití v hodin... 2 Podmínky... 2 Vhodná témata... 3 Nevhodná témata... 3 Vybrané téma: Funkce... 3 Úvod... 3 Použití v tématu funkce...
Metodický materiál Ma Metodický materiál Ma... 1 Úvod... 2 Možnosti použití v hodin... 2 Podmínky... 2 Vhodná témata... 3 Nevhodná témata... 3 Vybrané téma: Funkce... 3 Úvod... 3 Použití v tématu funkce...
VYUŽITÍ MODULU EXCELENT PRO MANAŽERSKÉ ANALÝZY V APLIKACÍCH VEMA
 VYUŽITÍ MODULU EXCELENT PRO MANAŽERSKÉ ANALÝZY V APLIKACÍCH VEMA Ing. Bc. Jaroslav Šmarda Vema, a. s. smarda@vema.cz Abstrakt Ze zkušenosti víme, že nasazení speciálního manažerského informaního systému
VYUŽITÍ MODULU EXCELENT PRO MANAŽERSKÉ ANALÝZY V APLIKACÍCH VEMA Ing. Bc. Jaroslav Šmarda Vema, a. s. smarda@vema.cz Abstrakt Ze zkušenosti víme, že nasazení speciálního manažerského informaního systému
2 Požadavky na nové funkní chování pi zmnách mezi jednotlivými návstními znaky
 Obsah: 1. Úvodní ustanovení 2. Požadavky na nové funkní chování pi zmnách mezi jednotlivými návstními znaky svtelných hlavních návstidel a samostatných a opakovacích pedvstí pi poruchách jejich svícení
Obsah: 1. Úvodní ustanovení 2. Požadavky na nové funkní chování pi zmnách mezi jednotlivými návstními znaky svtelných hlavních návstidel a samostatných a opakovacích pedvstí pi poruchách jejich svícení
CZECH Point. Co dostanete: Úplný nebo ástený výstup z Listu vlastnictví k nemovitostem i parcelám v jakémkoli katastrálním území v eské republice.
 Co je to Czech POINT: CZECH Point eský Podací Ovovací Informaní Národní Terminál, tedy Czech POINT je projektem, který by ml zredukovat pílišnou byrokracii ve vztahu oban - veejná správa. Projekt Czech
Co je to Czech POINT: CZECH Point eský Podací Ovovací Informaní Národní Terminál, tedy Czech POINT je projektem, který by ml zredukovat pílišnou byrokracii ve vztahu oban - veejná správa. Projekt Czech
PROJEKTOVÁNÍ POZEMNÍCH KOMUNIKACÍ
 VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MICHAL RADIMSKÝ PROJEKTOVÁNÍ POZEMNÍCH KOMUNIKACÍ MODUL 2 KUBATURY, HMOTNICE, ROZVOZNÉ VZDÁLENOSTI STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UENÍ TECHNICKÉ V BRN FAKULTA STAVEBNÍ ING. MICHAL RADIMSKÝ PROJEKTOVÁNÍ POZEMNÍCH KOMUNIKACÍ MODUL 2 KUBATURY, HMOTNICE, ROZVOZNÉ VZDÁLENOSTI STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Aditivní barevný model RGB pidává na erné stínítko svtla 3 barev a tak skládá veškeré barvy. Pi použití všech svtel souasn tak vytvoí bílou.
 Model CMYK V praxi se nejastji používají 4 barvy inkoust a sice CMYK (Cyan Azurová, Magenta Purpurová, Yellow - Žlutá a Black - erná). ist teoreticky by staily inkousty ti (Cyan, Magenta a Yellow) ale
Model CMYK V praxi se nejastji používají 4 barvy inkoust a sice CMYK (Cyan Azurová, Magenta Purpurová, Yellow - Žlutá a Black - erná). ist teoreticky by staily inkousty ti (Cyan, Magenta a Yellow) ale
Úvodní studie (pokraov
 Úvodní studie (pokraov ování) Model jednání a kontext Model jednání (use case model) slouží pro evidenci aktér a služeb systému. Kontextový diagram slouží pro evidenci aktér a datových tok. Oba modely
Úvodní studie (pokraov ování) Model jednání a kontext Model jednání (use case model) slouží pro evidenci aktér a služeb systému. Kontextový diagram slouží pro evidenci aktér a datových tok. Oba modely