Úvod do nelineární pružnosti
|
|
|
- Alena Urbanová
- před 6 lety
- Počet zobrazení:
Transkript
1 Úvod do nelineární pružnosti Lukáš Horný Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS Verze
2 Proč nelineární pružnost? Zdroje nelinearit Velké posuvy Velká natočení Velké deformace Nelineární materiál
3 Proč nelineární pružnost? Zdroje nelinearit Velké posuvy Velká natočení Velké deformace Nelineární materiál
4 Proč nelineární pružnost? Zdroje nelinearit Velké posuvy Velká natočení Velké deformace Nelineární materiál


5 Proč nelineární pružnost? Tepenná stěna

6 Proč nelineární pružnost? Tepenná stěna

7 Proč nelineární pružnost? Tepenná stěna

8 Proč nelineární pružnost? Zadní zkřížený vaz
9 Proč nelineární pružnost?
10 Tělesa Mějme dvě tělesa a představme si je v matematických prostorech, které známe R 3 myslíme na prostor, kde každý bod má tři reálné souřadnice kde umíme měřit vzdálenosti kde každý bod umíme zaměřit vektorem jdoucím z počátku soustavy souřadnic
11 Vektorová algebra a analytická geometrie 0 = 0 X 3 3 E X X X X = 3 0 = 0 x 3 3 e x x = x x 3 Vzpomeňme si na Báze Operace (součiny, součty, ) Souřadnice Transformace E 0 = 0 X x e 0 = 0 X E = 0 0 x = 0 0 e
12 Vektorová algebra a analytická geometrie složky vektoru v dané bázi 0 0 u u= ue+ ue+ u3e3= u 0 + u + u3 0 = u 0 0 u 3 standardní báze v R 3 ortonormální, kartézská 0 0 e = 0 e = e3 = 0 0 0
13 Vektorová algebra a analytická geometrie Mějme vektory u a v a w z vektorového prostoru V nad R u u = u u 3 v v = v v 3 a t Ve V platí: u + v u+ v = w = u + v u + v 3 3 t u t u = t u t u 3 u v u 0 t u+ v = w tu
14 Vektorová algebra a analytická geometrie norma vektoru je číslo vyjadřující jeho délku T [ ] [ ] u = u = u u = u u skalární součin vektorů je číslo x 3 v 3 uv = uv i i uv i i u u u 3 v = = u v = = uv + uv+ uv 3 3= uvcos i= v 3 x x u T [ ] [ ] [ ] ( α ) vzdálenost vektorů (jimi zaměřených bodů) je číslo ( u, v) u v ( u v) ( u v) ρ = = v α v cos ( α ) u cos ( α ) x 3 = uv uv u v x x u v
15 Vektorová algebra a analytická geometrie vektorový součin je vektor e e e3 uv 3 uv 3 = u u u3= uv 3 uv 3 = v v v 3 uv uv u v w w= uvsin( α ) x 3 w smíšený součin je číslo vyjadřující objem rovnoběžnostěnu daného vektory u, v, w x 3 x x u w = 0 v w = 0 V = ( u v) w = u ( v w) = v ( w u) x x
16 Vektorová algebra a analytická geometrie Lineární transformace A prostoru V A: V V ( u+ v) = ( u) + ( v) ( tu) = ta( u) A A A A Aditivita Homogenita Lineární transformaci A prostoru V reprezentujeme maticí A ( ) ( tu) = A u+ v = Au+ Av A tau A u= A u w a a a3 u au + au + a3u3 w = a a a u = a u + a u + a u = w a3 a3 a 33 u 3 a3u a3u a33u 3 w + + 3
17 Vektorová algebra a analytická geometrie Lineární transformace A prostoru V A: V V A 0 = u X = X = X X 3 X 3 w 0 X X+ X = Au= 0 0 X = X 0 0 X 3 X 3 X X
18 Vektorová algebra a analytická geometrie Násobení matic B a A interpretujeme jako skládání zobrazení Vzniká nové zobrazení C = BA Celou událost čteme jako B po A C = B A AB = C ( ) ( ) ( ) ( ) ( ) C u = B A u = B A u = B w = z ( ) ( ) ( ) A u= w B w = z ( ) ( ) C u = A B u = A B u = A w = z B u= w A w = z
19 Vektorová algebra a analytická geometrie C= BA Cij = Bik Akj = Bik Akj 3 k = C = B A + B A + B A = B A 3 3 k k k = 3 C C C3 B B B3 A A A3 C C C = B B B A A A C3 C3 C 33 B3 B3 B 33 A3 A3 A 33 C = B A + B A + B A = B A k k3 k = C = B A + B A + B A = B A k k3 k = 3 3
20 Vektorová algebra a analytická geometrie 0 = 0 ( ) 3 E 0 e E, E E = = E 0E 0E, X 3 x 3 X x X = X = x = x X x 3 3 x X ( ) 3 e E, E, E = = sin30 E + cos30 E + 0E = / = 3 / 0 3 Dvě báze v jednom prostoru: Natočit soustavu souřadnic znamená přejít od vektorové báze E i k e i ( ) ( ) (,, ) e E, E, E = cos30 E + sin30 E + 0E 3 3 e E, E, E = sin30 E + cos30 E + 0E 3 3 e E E E = 0 E + 0E + E E 0 = 0 E = 0 0 X x 3 / e( E, E, E3) = cos30 E+ sin 30 E + 0E3 = / 0
 e e T ei E, E, E3 = MatE E i ( Mat ) = e E ( MatE) X e = MatE x x = e ( Mat ) T E X x cos30")
21 Vektorová algebra a analytická geometrie ( ) ( ) (,, ) e E, E, E = cos30 E + sin30 E + 0E 3 3 e E, E, E = sin30 E + cos30 E + 0E 3 3 e E E E = 0 E + 0E + E Dvě báze v jednom prostoru: Natočit soustavu souřadnic znamená přejít od vektorové báze E i k e i cos30 sin30 0 e Mat = sin30 cos E ( ) e e T ei E, E, E3 = MatE E i ( Mat ) = e E ( MatE) X e = MatE x x = e ( Mat ) T E X x cos30 sin30 0 X x = sin30 cos30 0 X x X 3
22 Vektorová algebra a analytická geometrie Připomeňme si některé, v mechanice běžné, vektorové veličiny Polohový vektor Rychlost a zrychlení Síla Hybnost x v F p dx = a = dt d = p dt = mv dv dt p v F 0 = 0 x 3 3 e a a t a n x x = x x 3 Moment síly vzhledem k počátku Moment hybnosti vzhledem k počátku M = x F L= x p x x = 0 0 e e 0 = 0
23 Kinematika deformace a její míry
24 Deformace Silové působení
25 Deformace = Zobrazení E E D C B A C B D A

26 Deformace = Zobrazení 0 = 0 X 3 3 E 0 = 0 3 e x 3 E E 0 = 0 X E D C B A X E = 0 0 D C B x e 0 = 0 A x e = 0 0
27 Zobrazení f : X x 0 = 0 3 x 3 e 0 = 0 3 E f : X x P x x = x x 3 X 3 X X = X X 3 X P E X = 0 0 E 0 = 0 x x = 0 0 e e 0 = 0 x f( X, X, X3) x = f( X, X, X3) = x 3 f3( X, X, X3) (,, ) (,, ) (,, ) = f X X X e + f X X X e + f X X X e
 a spojité Požadujeme též existenci")
28 Zobrazení f : x X Po zobrazení f : X x požadujeme, aby bylo bijektivní (vzájemně jednoznačné) a spojité Požadujeme též existenci spojitého f
29 Materiálový vs. prostorový popis Materiálový popis znamená, že pracujeme s f : X x to je typické pro mechaniku poddajných těles (náčrtek stavu před deformací a po ní) Prostorový popis znamená, že pracujeme s f : x To je typické pro mechaniku kapalin (kontrolní objem) X

30 Zobrazení f : X x X 3 x 3 0 = 0 x x = x x 3 E 0 = 0 3 e 3 P X x P X X X X = 3 x 05. X x = 05. X = 05. X e X e + X e x X E 0 = 0 e 0 = 0 = 0 0 E = 0 0 e X x
31 Zobrazení f : X x X, x 3 3 e 3 E 3 E e E e k X, x x X+ kx x = X = ( X + kx ) e + X e + X e x X X, x
32 Zjišťování lokálních vlastností zobrazení Derivace f : x f ( x) f ( x ) = 0 lim ( + ) ( ) f x0 h f x0 h 0 h f ( x 0 ) > 0 f ( x 0 ) = 0 f ( x 0 ) = 0
33 Zjišťování lokálních vlastností zobrazení Směrová derivace a gradient f : 3 x f ( x) ( x + v) ( x ) f 0 h f 0 v f ( x0) = lim = f ( x0) v h 0 h ( x + ( 00,, )) ( x ) ( x ) f h f f ( 00,, ) f ( x0 ) = lim = h 0 h x ( ) ( x ) ( x ) f 0 x f ( x ) f ( x ) f ( x ) f ( x ) f x = = e + e + e x x x x3 f x 3 0 Směrová derivace Parciální derivace Gradient skalární funkce
34 Zjišťování lokálních vlastností zobrazení Gradient f : 3 3 x = f ( X) ( x ) (,, ) (,, ) (,, ) x f X X X 3 x = f X X X3 x f X X X ( x ) ( x ) ( x ) f f f x x x f f f ( x ) ( x ) ( x ) f 0 = x x x3 f f f x x x ( x ) ( x ) ( x )
 ( x ) ( x ) 0 0 0 f 0 = = x x x 3 f f f x x x ( x ) ( x ) ( x ) 3 0 3 0 3 0 3 e e e 3 e e e 3 ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) f f f f f f f f f e e")
35 Zjišťování lokálních vlastností zobrazení Gradient (,, ) ( ) (,, ) x f X X X3 x = f X, X, X = f ( X, X, X ) e + f ( X, X, X ) e + f ( X, X, X ) e x f X X X ( x ) ( x ) ( x ) ( x ) f f f x x x f f f ( x ) ( x ) ( x ) f 0 = = x x x 3 f f f x x x ( x ) ( x ) ( x ) e e e 3 e e e 3 ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) ( x ) f f f f f f f f f e e + e e + e e + e e + e e + e e + e e + e e + e e x x x3 x x x3 x x x3
 vzhledem ke změně x df ( x) dx Gradient i (,, ) f X X X 3 x j i, j")
36 Zjišťování lokálních vlastností zobrazení Podstatou stále zůstává derivování měření velikosti změny f(x) vzhledem ke změně x df ( x) dx Gradient i (,, ) f X X X 3 x j i, j = 3,,

37 Deformace Takže odpověď na otázku, co se děje s tělesem při deformování, budeme opět hledat pomocí derivací Pomocí tzv. deformačního gradientu

38 Deformace X 3 X + dx Q X dx P f : X X x x 3 x+ dx Q dx P x P Referenční konfigurace: bod P zaměřen X Bod v elementárním okolí Q zaměřen X + dx Deformovaná konfigurace: bod P zaměřen x Bod v elementárním okolí Q zaměřen x + dx x x X


39 Deformační gradient F Infinitesimální změna ( diferenciál ) zobrazení f df : dx dx F d = x dx F = Grad ( x( X) ) F = X x
40 Deformační gradient F F = = (,, ) (,, ) (,, ) x x x x X X X x X X X x X X X X X X X 3 X X 3 x x x x X X X x X X X x X X X X X X3 X X X3 x x x x X X X x X X X x X X X X X X 3 X X X (,, ) (,, ) (,, ) (,, ) (,, ) (,, )
41 Deformační gradient F dx = F dx x x x X X X3 dx dx x x x dx = dx X X X 3 dx 3 dx 3 x3 x3 x 3 X X X 3
42 Deformační gradient F F představuje lineární zobrazení mezi dvěma vektorovými prostory (prostor referenčních a deformovaných elementárních vektorů) F:dX dx { } dx e + dx e + dx e = F dx E + dx E + dx E Takovou veličinu nazýváme tenzor F je konkrétně tenzor druhého řádu (tzv. smíšený, též dvoubodový)
43 Deformační gradient F xe xe xe xe xe xe dxe+ dx E + dx 3E3 X X X3 3 X X dx E E E E E e dxe X 3E3 xe xe xe xe xe xe dxe = dx = X X X E dxe+ dx E + dx 3E3= 3 3 dx E E E 3 3 dx XE XE X3E3 e 3 3 x3 3 x3 3 x E e e 3e 3 x 3e3 x3e3 x3e 3 X X X dx + dx + dx 3 3 E E 3E E E E 3 X X X E E 3E3
44 Deformační gradient F xe xe xe xe xe xe dxe+ dx E + dx 3E3 dx+ dx + dx 3 XE XE X3E3 X X X3 xe xe xe xe xe xe = dxe+ dx E + dx 3E3= dx+ dx + dx 3= XE XE X3E3 X X X3 x3e3 x3e3 x 3e 3 x dx + dx + dx 3e3 x3e3 x3e 3 E E 3E 3 X X X dx dx dx 3 E E 3E X X X 3 x x x dx+ dx + dx 3 X X X3 x x x x x x x x x x3 x3 x 3 = dx+ dx + dx 3= dx+ dx + dx 3e + dx+ dx + dx 3e + dx+ dx + dx 3e3 X X X3 X X X3 X X X3 X X X 3 x3 x3 x 3 dx + dx + dx 3 X X X 3
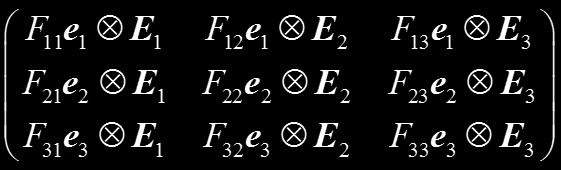
45 Deformační gradient F F xe xe xe x x x ee ee ee3 XE XE X3E3 X X X3 xe xe xe x x x = = ee ee ee3 = XE XE X3E3 X X X3 x3e3 x3e3 x 3e 3 x3 x3 x X X X e E e E e 3 3 E E 3E E 3 X X X 3 x x x x x = ( e E ) + ( e E ) + ( e E ) + ( e E ) + ( e E ) + X X X X X x 3 3 x x x ( e E ) ( e E ) ( e E ) ( e E ) X3 X X X3
46 Deformační gradient F F ik x = X i K ( e E ) ( e E ) 3 ( e E3 ) ( e E ) ( e E ) ( e E ) ( e E ) ( e E ) ( e E ) F = F + F + F + F + F + + F + F + F + F
47 Tenzory druhého řádu Lineární zobrazení (transformace) mezi dvěma vektorovými prostory Tenzor. řádu A tedy je A : V V nebo A : V W Jako lineární transformace je tenzor druhého řádu reprezentován maticí A ij nebo A ik A : V W v = A u [ v] = [ A][ u] A : V W A = AiKei EK v A A A3 u v = A A A u 3 v 3 A3 A3 A 33 u 3 (,, 3) (,, ) u V E E E v W e e e 3

48 Operace s tenzory druhého řádu po složkách u,v V t R ( u v) =uv i j ij u v uv uv uv 3 u v = uv uv uv 3 u 3 v 3 uv 3 uv 3 uv 3 3 A = uv ij i j
49 Operace s tenzory druhého řádu po složkách u,v V t R A A A A3 = A A A3 = Ae e + Ae e + + A3e e3 + A33e3 e3 = A3 A3 A = A A A A
 po")
50 Operace s tenzory druhého řádu po složkách u,v V t R 3 A = ii = ii i= ( ) tr A A stopa tenzoru A A A A A A A 3 A 3 A vnitřní součin (analogon skalárního) po složkách
( x y) = ( v x)( u y) = ( u y)( v x) 3 v x = vx")
")
51 Operace s tenzory druhého řádu po složkách AB = C Skládání zobrazení = násobení matic tenzorů ( u v)( x y) = ( v x)( u y) = ( u y)( v x) 3 v x = vx = k = k k vx k k AA A A I Iij δij δij i j δij = = =, kde = pro =, jinak = 0 Inverzní tenzor jako inverzní matice; jednotkový tenzor (matice) Kroneckerovo delta


52 Příklady pro deformační gradient F x 05. X x = 05. X = 05. X e X e + X e x X F ik x = X i K F x x x X X X x x x = = X X X 3 x x x X X X
53 Příklady pro deformační gradient F x X+ kx x x = X = ( X+ kx ) e+ X e+ X 3e i 3 FiK = x X X 3 3 K F x x x X X X3 k 0 x x x 0 0 = = X X X 3 x x x X X X
54 Nesymetrie F F má devět nezávislých složek F ik i,k =,,3 To je důsledek přítomnosti rotací R při zobrazení (pohybu) f : X x mezi konfiguracemi. f obsahuje informaci o translaci, rotaci i deformaci. Od popisu deformace samozřejmě očekáváme, že bude založen pouze na změně relativní vzdálenosti bodů tělesa vůči sobě. Dodejme, že translace je konstanta, a tak derivována na 0, tudíž není v F. ( X ) df F = = RU = vr dx


55 Polární rozklad F F = RU = vr F R U = F v R = Dodejme, že U a v existují jednoznačně
56 Tenzory deformace ( ) T T T T C = F F = RU RU = U R RU = U R RU = UIU = U T b= FF = v E e ( C I) = ( I b ) = ln( U) levý Cauchyův-Greenův Greenův (též Lagrangeův) Eulerův (též Almansiho) logaritmický pravý Cauchyův-Greenův
57 C FE e FE e F3E e3 Fe E Fe E F3e E3 T = F F = F E e F E e F E e F e E F e E F e E = F3 3 F3 3 F F3 3 F3 3 F E e E e E e e E e E 33e3 E3 C ( E e) ( e E) ( E e) ( e E) ( E e3) ( e3 E) E E + E E E E ( ) E E FF + FF + FF = 3 3 = FF FF + FF = FF + FF + FF C C ( E e) ( e E) ( E e) ( e E) ( E e3) ( e3 E) E E E E E E ( ) E E FF + FF + FF = 3 3 = FF + FF + FF = FF + FF + FF ( E e) ( e E) ( E e) ( e E) ( E e3) ( e3 E) E E E E E E ( ) E E F F + F F + F F = 3 3 = F F + F F + F F = F F + F F + F F F + F + F3 FF + FF + FF 3 3 FF 3 + FF 3 + FF 3 33 = FF + FF + F3F3 F + F + F3 FF3 + FF3 + F3F33 = FF3 FF3 F3F33 FF3 FF3 F3F33 F3 F3 F = ( F + F + F3 ) E E + ( F + F F3 ) ( F3 F3 F33 ) ( FF FF FF 3 3 ) ( F F F F F F ) ( F F F F F F ) + E E E E E E E E E E = C
 ( E e) ( e E) ( E e) ( e E3) ( E3 e) e e e e e")
 ( F F F3 ) ( F3 F3 F33 ) ( FF FF F3F3 ) = + + e e + + + e e + + + e")
58 b = FF T = ( e E) ( E e) ( e E) ( E e) ( e E3) ( E3 e) e e e e e ( ) e e b = FF + FF + FF = 3 3 = FFe + FF + FF = FF + FF + FF ( e E) ( E e) ( e E) ( E e) ( e E3) ( E3 e) e e e e e ( ) e e b = FF + FF + FF = 3 3 = FFe + FF + FF = FF + FF + FF ( e E) ( E e) ( e E) ( E e) ( e E3) ( E3 e) e e e e e ( ) e e b = F F + F F + F F = 3 3 = F F e + F F + F F = F F + F F + F F ( F F F3 ) ( F F F3 ) ( F3 F3 F33 ) ( FF FF F3F3 ) = + + e e e e e e e e 3 3 ( F F F F F F ) ( F F F F F F ) e e e e = b
59 Tenzory deformace Platí: F = RU = vr R T Páry tenzorů U a v a C a b mají stejná vlastní čísla (λ i pro U a v, λ i pro C a b, i =,,3). Tato vlastní čísla nazýváme hlavní streče. U a C (respektive v a b) mají stejné vlastní vektory N i (respektive n i ). Vlastní vektory tvoří ortonormální bázi prostoru. Spektrální rozklad: = R Úloha o vlastních číslech A u = λu ( A λ I) u= 0 det ( A λ I) = 0 λ 0 0 λ 0 0 C= 0 λ 0 = λ N N+ λn N + λ3n3 N3 λn n+ λn n + λ3n3 n3 = 0 λ 0 = b 0 0 λ λ 3 Pozor na formální shodu matic, která ale neznamená rovnost tenzorů!
60 Tenzory deformace Platí: Pro jistotu si připomeňme, že = λ P + t u,t Znamená, že vlastní vektor u při transformaci A zůstane na přímce, na které ležel před transformací A. ( ) 0 Au u { } 3 Rovnici det A λi = lze psát ve tvaru λ I, kde I, I, I 3 jsou tzv. hlavní λ + Iλ I3 = 0 invarianty A. I ( A) = tr = λ + λ + λ 3 ( ( ( )) ( )) I = tr A tr A = λλ + λλ 3 + λλ 3 I = det = λλλ ( A) 3 3 I ( C) = tr = λ + λ + λ C 3 I tr tr I = det = λλλ ( ) ( ( C) ) ( C ) C = = λλ + λλ 3 + λλ 3 ( C) C 3 3
 0 0 3 F = RU = 0 0 = sin( 30 ) cos ( 30 ) 0 0 0 0 0 0 0 0 0 0 λ λ λ U U U 3 = 3 = = 0 N = N = 0 N3 = 0 0")
61 Tenzory deformace x x x 3 3 = X + 3 X 3 = 3+ X + + X = X F = cos ( 30 ) sin( 30 ) F = RU = 0 0 = sin( 30 ) cos ( 30 ) λ λ λ U U U 3 = 3 = = 0 N = N = 0 N3 = 0 0

62 Linearizace tenzorů deformace Vektor posuvů U = x X U x X XU = = = F I X X X F = + X U I
63 Linearizace tenzorů deformace Protože platí = U = x X F I+ XU tak pro Greenův-Lagrangeův tenzor E můžeme psát: ( ) (( ) ( ) ) (( ( ) )( ) ) T T T T E= F F I = I+ XU I+ XU I = I + XU I+ XU I = ( ( ) ( ) ) ( ( ) ( ) ) T T T T T I I+ XU + XU + XU XU I = XU + XU + XU XU E IK UI UK UJ U = + + X X X X K I I K J

64 Linearizace tenzorů deformace ε IK UI = + XK U X K I E E E E E E U U U U U U U U X X X X X X X X = U U U U U U U U X X X X X X X X = U U U U U U U U = X X X X X X X X U U U U U U U U X X X X X X X X = 3 3 U U U U U U U U = X X X X X X X X U U U U U U U U = X X X X X X X X ε ε ε ε ε ε U U = + X X = + U U = + X X U X = U U = + X X U X U X U X 3 3 U U = + X X
65 Linearizace tenzorů deformace ( ) u= x X = x X x pro Eulerův-Almansiho tenzor e můžeme psát: u x X = = = xu I F F = I x x x ( ) ( ) ( ( ) ( )) ( ( ( ) )( )) T T T T e= I b = I F F = I I xu I xu = I I xu I xu = ( T T ( ) ( ) ) ( T T ( ) ( ) ) T I I I+ xu+ xu xu xu = xu+ xu xu xu x u e ij u u i j uk u k u u i j = + εij = + xj xi xi x j xj x i

66 Tenzory deformace Porovnání číselných hodnot při protahování x F = λ X λ x = = = X l L F λ 0 0 = 0 λ λ 3
67 Tenzory deformace F F = λ T C= F F C = λ U = C U = λ T b= FF b = λ v = b v = λ E= = e ( C I) E ( λ ) ( I b ) e ( λ ) = = ln U lnu = lnλ ε ε = λ λ ( λ ) ( ) λ λ lnλ λ
68 Tenzory deformace Těleso se deformuje, jestliže se změní vzdálenost alespoň dvou bodů tělesa Změna vzdálenosti PQ dx dx 0 dx dx 0 dx dx 0 dx dx dx dx 0 T FdX FdX dx dx 0 dx F FdX dx dx 0 f : X x x 3 x+ dx Q dx x P ( F T F I) E 0 E 0 dx dx = dx dx X 3 X + dx Q X dx P X x E= FF I C= T ( ) T FF x X
69 Tenzory deformace x = X x = X x = X F = M M m = FM = 0 0 M = M M M 3 T F { X} { x } F :{ x} { X} X 3 : x 3 :{ } { } T C= FF X X 0.5 x T C= FF = 0 0 M = CM X X X X x X 4
 3 3 0 dv = JdV J = det = I = I > λ λ Nestlačitelný materiál (izochorická deformace) dv dv = J = λλλ = 3")
70 Deformace liniových, plošných a objemových elementů Liniový element dx = F dx Změna objemu při deformaci λ 3 C U ( F) dv = JdV J = det = I = I > λ λ Nestlačitelný materiál (izochorická deformace) dv dv = J = λλλ = 3
 T ds FdX JdS dx = 0")

71 Deformace plošných elementů ds = J ds F T dv = JdV ds dx = JdS dx ds F dx = JdS dx T ( ) T ds FdX JdS dx = 0 F ds dx JdS dx = 0 F ds JdS dx = 0 T T F ds JdS = 0 ds = J F ds Připomeňme, že platí ds = dsn ds = dsn u Av= A T uv


72 Velké deformace v reálných úlohách Ex vivo (laboratorní) biomechanika inflační test aorty



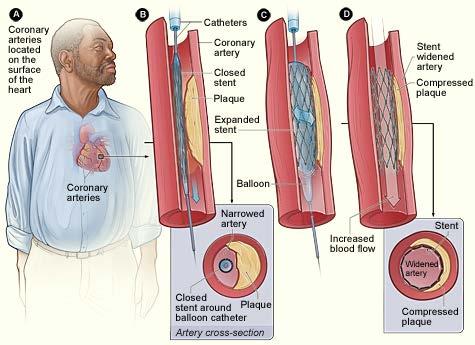
73 Velké deformace v reálu Ex vivo (laboratorní) biomechanika - stent


74 Velké deformace v reálných úlohách Nestabilita při nafukování elastomerní trubice
 X x L NLGEOM: ON (option) l l L+ l ln ln ln ln L L")
75 Tenzory deformace v MKP systémech Vždy je třeba zkontrolovat manuál! ANSYS, ABAQUS: NLGEOM: OFF (default) X x L NLGEOM: ON (option) l l L+ l ln ln ln ln L L ( U) = = = ( + ε )
76 Inflace a extenze válcové trubice Kartézské souřadnice X = (X,X,X 3 ) Válcové souřadnice X = (R,Θ,Z) X 3 X = (X, X, X 3 ) = (RcosΘ, RsinΘ, Z) = RcosΘE + RsinΘE + ZE 3 RE R (Θ) + ZE Z = ( (X + X ), arctg(x /X ), X 3 ) = (R, Θ, Z) = X R (0, ) Θ (0,π) Z R X E Z Z E 3 E E R sin(θ) E R R E Θ X R cos(θ) Θ E R = cosθe + sinθe E Θ = -sinθe + cosθe E Z = E 3
77 Inflace a extenze válcové trubice Deformační gradient F = dx/dx F x g x = g e E = ( e E ) = F e E X i i i i i K i K ik i K K G K GK XK i = r, θ, z K = R, Θ, Z gi a GK mají význam normalizačních koeficientů, které jsou nutné pro kompenzaci fyzikálních rozměrů derivací r m θ FrR kdežto Fθ R R m R m
78 Inflace a extenze válcové trubice Přirozené bázové vektory g i (průběžný) a G K (referenční) ξ 3 g i x = ξ = r, ξ = θ, ξ = ξ i z x 3 x x g g 3 dx g ξ G K X = Ξ = R, Ξ =Θ, Ξ 3 = Ξ K Z e 3 e e x x + dx ξ
79 Inflace a extenze válcové trubice Přirozené bázové vektory g i a G K x x x x x g = e = e = e + e + e i = r, θ, z 3 j j 3 i j j 3 j= ξi ξi ξi ξi ξi X X X X X G = E = E = E + E + E K = R, Θ, Z 3 K J J 3 J J J = Ξ K Ξ K Ξ K Ξ K Ξ K 3
80 Inflace a extenze válcové trubice Přirozené bázové vektory g i a G K x x x z gr = e + e + e = ( r cos ( )) e + r sin( ) e + e = cos sin r r r r r r ( ) ( ( ), ( ), ) 3 3 θ θ 3 θ θ 0 x x x z gθ = e + e + e = ( r cos ( θ) ) e + r sin( θ) e + e = r sin θ r cos θ θ θ θ θ θ θ ( ) ( ( ), ( ), ) x x x z gz = e + e + e = ( r cos ( θ) ) e + r sin( θ) e + e = z z z z z z ( ) (,, ) ( ( ), ( ),0) GR = cos Θ sin Θ G = ( R sin( Θ Θ ), R cos ( Θ ),0) G = Z ( 00,, ) g r = g θ = r g z = G Z = G R = G Θ = R
81 Inflace a extenze válcové trubice Přirozené bázové vektory g i a G K g g g r θ z = = = e r re e z θ G G G R Θ Z = = = E R RE E Z Θ Metrický tenzor g ij ds metrika je skalární invariant prostoru ( ) ( ) = x x = g ξ g ξ = g g ξ ξ = ξ ξ ds d d id i jd j i jd id j gijd id j
82 Inflace a extenze válcové trubice Deformační gradient F = dx/dx = e E + e E + F FrR r R Fr Θ r F e E + F e E + F e E + F e E rz r Z θr θ R θθ θ Θ θz θ Z + F e E + F e E + F e E zr z R zθ z Θ zz z Z r r r R R Z Θ θ r θ θ = r r R R Θ Z z z z R R Θ Z Θ
83 Inflace a extenze válcové trubice Interpretace složek F F rr (, Θ, Z) r R = R (, Θ, Z) r R FrR = = f R R ( ) pokud se trubice nafukuje rovnoměrně a zachovává symetrii F rθ = ( Θ Z) r R,, R Θ (, Θ, Z) r R Fr Θ = 0 r = r( Θ) tj. zdeformovaný poloměr r závisí na obvodové souřadnici R Θ Zdeformovaná geometrie nemůže být kruhový válec

84 Inflace a extenze válcové trubice Interpretace složek F F rz = (, Θ, Z) r R Z (, Θ, Z) r R FrZ = 0 r = r( Z) tj. zdeformovaný poloměr r závisí Z na původní axiální souřadnici Z Taková situace může nastat, uvažujeme-li např. kuželovité trubice. U nich lze racionálně očekávat, že r = r(z), neboť vnější poloměr před deformací je R o = R o (Z).
85 Inflace a extenze válcové trubice Interpretace složek F F θ R = r θ ( R, Θ, Z) R ( R, Θ, Z) θ Fθ R = r 0 θ = θ( R) tj. zdeformovaná obvodová souřadnice závisí na počátečním poloměru R Pro nenulovost by musel nastat zkos (odklon). Přírůstek polohy na nafouknutém obvodu by závisel na velikosti počátečního poloměru, tj. došlo by k vzájemnému posuvu/smyku obvodových vrstev (obvod R a obvod R + dr). F θ R 0 F θθ = r R θ ( R, Θ, Z) Θ (, Θ, ) θ R Z r = když se kruhová válcová trubice nafukuje do tvaru kruhové válcové trubice Fθ Θ = Θ R
 tj.")
86 Inflace a extenze válcové trubice Interpretace složek F F θ Z 0 F θ Z θ = r Z F θ Fθ Z = r 0 θ = θ( Z) tj. když zdeformovaná obvodová souřadnice závisí na počáteční axiální poloze Z V typu zkosu rozpoznáváme zkrut. zr z = R z FzR = 0 z = z( R) tj. když axiální protažení závisí na počátečním poloměru R Axiální, nebo-li teleskopický, smyk. V trubici může být vytvořen např. podélným třením vazké kapaliny o stěnu (krev). FzR 0
87 Inflace a extenze válcové trubice Interpretace složek F F zθ = R z Θ z Fz Θ = 0 z = z( Θ) axiální protažení by muselo záviset na počáteční poloze podél obvodu R Θ F zz z = Z z FzZ = 0 z = z( Z) axiální protažení není po celé délce trubky rovnoměrné Z
88 Inflace a extenze válcové trubice Nejběžnější model kinematiky inflace a extenze válcové trubice počítá s rovnoměrným protažením a nafouknutím, čili: F r R λrr r = 0 λθ Θ = R 0 0 λ zz l 0 0 L
89 Inflace a extenze tenkostěnné válcové trubice Válcová membránová skořepina Referenční konfigurace r = λ R z = λ Z h = λ H θθ zz rr HH RR Průběžná konfigurace LL P ext = 0 PPPPrr ii FF rrrrrr F h H λrr r = 0 λθ Θ = R 0 0 λ zz l 0 0 L rr P int = P h ll
90 Rychlost deformace Rozlišujeme materiálovou rychlost V(X,t) a prostorovou rychlost v(x,t) Lépe řečeno, hovoříme o rychlosti v materiálovém nebo prostorovém popisu x( X, t) V ( X, t) = v( x, t) t = (, t) X x t x = X = f f ( X) ( x)
91 Rychlost deformace Časová derivace, neboli rychlost, deformačního gradientu F, (materiálové souřadnice) (, t) d (, t) (, t) F d d x X x X V X = F ( X, t) = = = = dt dt X X dt X Grad ( V)
92 Rychlost deformace Prostorový gradient rychlosti l dv = ldx v l = = grad ( v) x l ij v = x i j v Q v P dv
93 Rychlost deformace ( ) V f ( x) (, t) ( ) ( ) x ( ),,,, F V X t v x t v x t v x t x = Grad ( V) = = = = = = grad ( v) F= lf X X X X x x X l = FF x = f X = f ( X) ( x) ( ) V, ( X x X t, t) = v ( x, t ) t = (, t) X x t
94 Prostorový tenzor rychlosti deformace d Tenzor l není symetrický Rozložíme ho na symetrickou část d a antisymetrickou část w l = d+ w d = l+ l T ( ) w = l l T ( ) d = w T d T = w Prostorový tenzor rychlosti deformace d Tenzor spinu w
95 Materiálová rychlost deformace d dt d ( T ) ( T T ) E= E = F F I = F F+ F F = C dt Transformace mezi materiálovým a prostorovým popisem: C E F T = = df Což mimochodem platí nejen pro rychlosti: E = e = F T F ef T EF materiálový popis = F prostorový popis = F T T ( prostorový popis) F ( materiálový popis) F
96 Rychlost deformace, a 3D elementů d dt d dt d dt d dx= ( FdX) = F dx= FF dx= ldx dt d ( T F ) T ds = J ds =... = div( v) ds l ds dt J J = : F =... = Jdiv = Jtr d F ( v) ( )
97 Míry napětí, čili plošná intenzita vnitřních sil
98 Tenzor napětí σ
 tak, že platí lim s s 0 zde ds je velikost plochy elementárního okolí bodu x v rovině řezu a df je infinitesimální vektor")
99 Tenzor napětí σ (Cauchyovo neboli skutečné) SR Zavádíme vektor (plošné) intenzity vnitřních sil t (tzv. trakční nebo též napěťový vektor) tak, že platí lim s s 0 zde ds je velikost plochy elementárního okolí bodu x v rovině řezu a df je infinitesimální vektor vnitřní síly uvádějící řez do rovnováhy t = f df = tds
100 Tenzor napětí σ (Cauchyovo neboli skutečné) Tenzor druhého řádu, čili zobrazení σ, které promítá n, což je vektor vnější normály roviny řezu v bodě x, na napěťový vektor t σ : n t t = σ n t σ σ σ3 n t = σ σ σ n 3 t 3 σ3 σ3 σ 33 n 3 Takže tenzor napětí σ umožňuje určit napěťový vektor t v bodě x v libovolném řezu, čili pro libovolný vektor n. To je úplná informace o stavu napjatosti v bodě.
101 Tenzor napětí σ (Cauchyovo neboli skutečné) σ = e σ e = e t ik i k i k σ σ σ3 σ + σ + σ3 t = t + t + t3 = σ + σ + σ3 = σ + σ + σ3 σ σ σ σ + σ + σ Pozor na rozdíl v označování složek tenzoru napětí σ ij, zde i je směr průmětu a j směr normály stěny krychle t t σ σ σ3 σ = σ e = σ σ σ 0 = σ σ σ σ 0 σ σ σ σ3 0 σ = σ e = σ σ σ = σ σ σ σ 0 σ 3 t σ σ σ3 0 σ3 = σ e = σ σ σ 0 = σ σ σ σ σ

102 Tenzor napětí σ σ = σ e e + σ e e + σ e e + σ e e + σ e e + σ e e T σ = σ σ = σ ik ki Pozor na rozdíl v označování složek tenzoru napětí σ ij, zde i je směr průmětu a j směr normály stěny krychle
103 Tenzor napětí σ n ρ = 0 0 t ρ s 0 0 s = σ nρ = = n α = 0 t α s 0 0 s = σ nα = = x 3 x s 0 0 σ = ρ α x Nekonečně mnoho rovin řezu nekonečně mnoho normál n nekonečně mnoho napěťových vektorů t, ale jen jeden tenzor napětí σ!
104 Otočení soustavy souřadnic transformace báze Q ( ) ( ) ( e ) ( ) ( ) ( ) ( e ) ( e ) ( e ) e e e e e e cos e, e cos e, e cos e, 3 3 = e e e e e e3 = cos e, e cos e, e cos e, e3 e e e e e e cos, e cos, e cos, e ei = Q e i 45 e e 3 e 3 Q ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) cos 45 cos 90 cos 35 0 = cos 90 cos 0 cos 90 = 0 0 cos 45 cos 90 cos 45 0 e e e e = e 0 0 e = Q e = 0 e e = Qe = e 0 0 = 0 e 3 e = Qe 3 = 0 e 3 = 0
105 Otočení soustavy souřadnic transformace vektorů u T = Q u u u u ( e e ) ( e e ) ( e e ) ( e e ) ( e e ) os( e, e ) ( e e ) ( e e ) cos ( e, e ) cos, cos, cos, u = cos, cos, c u cos, cos, u u i = Q u ji j 45 x = ρ t s x 3 x 3 x t = ρ s 3 0 t ρ = t ρ s 0 s = 0 = = Q s 0 0 T t ρ t s 3 ρ =
106 Otočení transformace tenzorů t ρ s 0 s = 0 = = Q s 0 0 T t ρ T = e Te = Qe T Q e = QQ e Te = QQ T = QT Q ( ) ( ) ( ) ij i j ki k mj m ki mj k m ki mj km ki km mj T = T Q TQ x = t s x t ρ = 45 x 3 s 0 s T σ = = Q σ Q= s 0 s 0 s = x t = ρ s 3 t s ρ = s T T T tρ = σ nρ = Q tρ = ( Q σ Q)( Q nρ) = s 0
107 Otočení transformace tenzorů Skalár (tenzor řádu 0) Vektor (tenzor řádu ) Tenzor. řádu Tenzor 3. řádu Tenzor 4. řádu t = t t t t t i ij ijl ijlp... = = = Q = ji ki t ki j QQ mj mj t km QQ Q nl t kmn QQ QQ ki mj nl qp t kmnq Složky vektorů a tenzorů závisí na použité bázi. Používejme ortonormální báze. Takové složky pak nazýváme fyzikální.
108 Tenzory napětí P a σ Řez v průběžné konfiguraci Ω( 0) C Ω ( t) f B Ω( 0) X N x n α T β Ω ( t) f 3 t β Řez v referenční konfiguraci a přenesení df df = tds = TdS

109 Tenzory napětí P a σ df = tds = TdS Cauchyův tenzor napětí σ t = σ n Tenzor smluvního napětí P T = P N t i = σ ijnj Ti = PiK NK

110 Tenzory napětí P a σ df = df tds = TdS σnds = PNdS σds = PdS T Jσ F ds = PdS P = Jσ F T P = Jσ F ik ij Kj
111 . Piolův-Kirchhoffův tenzor napětí S Řez v průběžné konfiguraci Řez v referenční konfiguraci a přenesení df Ω ( t) f x n α B Ω ( 0) Ω ( 0) X C N α T S Ω ( t) f 3 t β dx = F dx T β F f = F T = F t = TS d ds ds ds

112 . Piolův-Kirchhoffův tenzor napětí S Na elementární výslednici vnitřních sil df aplikujeme stejnou geometrickou transformaci jako při popisu kinematiky deformace. Dostáváme tak fiktivní materiálovou výslednici vnitřních sil df = F - df. d = Fd d = F d x X X x d Fd d F d f = F F = f df = F df = F TdS = T ds S Druhý Piolův-Kirchhoffův napěťový vektor T S = F T
113 Tenzory napětí S, P a σ Cauchyův tenzor napětí σ t = σ n ti = σ ijnj Tenzor smluvního napětí P T = P N Ti = PiK NK. Piolův-Kirchhoffův tenzor napětí S T = S N S I T = S N S IK K df = tds = TdS = T ds F S df = σ nds = P NdS = FS NdS df = σ ds= PdS = FSdS d J F T d T df = Jσ F ds = P ds = FSdS S = s T T d d J = σ = PF d = J FSF d f s s s
114 Tenzory napětí S, P a σ T S t T σ PF T J = J = FS F T J σ F T = P = FS J T F σ F = F P = S
115 Tenzory napětí S, P a σ Napětí při jednoosém tahu nestlačitelného materiálu (isochorický děj) Smluvní napětí P F síla P = A referenční plocha průřezu L l Cauchyovo napětí σ F σ = = a F A λ W H h w L v = V lwh = LWH la = LA a = A a =λ A l. Piolovo-Kirchhoffovo napětí S S= F P= J F σ F T S 0 0 λ 0 0 P 0 0 λ 0 0 σ 0 0 λ = 0 λ = 0 λ λ λ λ λ 3 S = λ P= λ σ S = λ F A

116 Tenzory napětí S, P a σ Napětí při jednoosém tahu nestlačitelného materiálu (isochorický děj) Smluvní napětí P F síla P = A referenční plocha průřezu Cauchyovo napětí σ F σ = = a F A λ. Piolovo-Kirchhoffovo napětí S S = λ F A
117 Konstitutivní rovnice
118 Konstitutivní rovnice Konstitutivní rovnice je matematický předpis vyjadřující vzájemnou závislost stavových proměnných v případě pružných těles jde o závislost mezi tenzorem napětí a deformace. Analogie se stavovou rovnicí v termodynamice plynů pv = nrt
119 cauchyovská elasticita přímá konstrukce σ = f ( ε) cauchyovský přístup znamená, že se snažíme zkonstruovat přímou funkční závislost mezi složkami tenzoru deformace a napětí tak, jak tomu je např. v zobecněném Hookeově zákoně σ = Eε při jednoosém stavu napjatosti lineárního izotropního materiálu

 E modul pružnosti ν")
120 cauchyovská elasticita přímá konstrukce Lineární izotropní materiál při obecném stavu napjatosti (maticový zápis) E modul pružnosti ν Poissonovo číslo
121 cauchyovská elasticita přímá konstrukce Symbolický (tenzorový) zápis ( ) I = tr + σ λ ε µ ε σ = λε δ + µε ij kk ij ij = λ 3 ( + ) ( ) ε σ tr σ µ µ λ µ λ εij = σij σkkδij µ µ 3λ µ ( + ) I µ je smykový modul pružnosti (někdy označovaný G) λ je tzv. první Lamého konstanta µ = λ = E ( + ν ) Eν ( + ν)( ν)
122 greenovská elasticita hyperelasticita greenovský přístup znamená, že se snažíme zkonstruovat funkci hustoty deformační energie W(ε) (hustota vzhledem k referenčnímu objemu) a složky tenzoru napětí σ získáváme pomocí derivací W(ε) σ = W ( ε ) ε σ ij = ( ) W ε ε ij ij
123 Hyperelasticita Konjugované páry napětí a rychlosti deformace jejich skalární součin je roven hustotě výkonu intenzity vnitřních sil (napětí) při deformaci Odvodí se pomocí bilance mechanické energie wint = Jσ :d= P:F = S:E = S:C
124 Hyperelasticita Elastické chování nulová hustota mařené energie D int Opět je zformulováno jako hustota výkonu W( F) W( F) D ( F) P:F ( F) int = wint W = W = P:F :F = P :F = F F 0 = PF = PF + PF + PF + PF + PF + PF + PF + PF + PF P:F ik ik W ( ) W( ) ( F) F ( F) d W d W df W dfik F = F = : = : = = dt F dt F dt F dt W W W W W W W W W = F + F + F + F + F + F + F + F + F F F F F F F F F F ik
125 Hyperelasticita Elastické chování nulová hustota mařené energie D int D int ( F) W( F) W = P :F = 0 P= F F P = W ( F) F P ik W = F ( F) ik
126 Hyperelasticita P = W F ( F) σ = J W b ( ) b b S ( E) W( C) W = = E C P ik W ( F ) W ( ) = J b W ( E) W( C) = b S = = F ik σ ij b ik kj IK E IK C IK
127 Hyperelasticita Lineárně pružný materiál (Hookeův) při inženýrských deformacích Eν E W = λ I + µ I = I + I + ν ν + ν ( )( ) W Eν E σij = = εkkδij + εij ε + ν ν + ν ij ( )( ) I = ε = ε + ε + ε I = ε ε = ε + ε + ε + ε ε + ε ε + ε ε ii 33 ij ji
128 Hyperelasticita Saint-Venantův Kirchhoffův deformacích lineárně pružný materiál při konečných Přímé rozšíření na Greenův-Lagrangeův ( ) ( ) tenzor deformace E W = tr E + µ tr E λ W S= = λ tr ( EI ) + µ E E Tento materiálový model selhává při popisu tlakové napjatosti!
 E( ) E λ ( )( ) Eν ( λ ) ( )( ) ( ) ( ) Eν E E = ( λ ) ν ( λ ) + ( λ ) = ν + λ = + ν ν ν ν ν + + + ν Eν Eν E ν + E ν = ( λ ) ν + = ( λ ) ( + ν)( ν) Eν ν + ν ν ν = ( λ ) = ( ) + ν ν + ν ν ( )( ) (")
129 Hyperelasticita Nerealističnost Saint-Venantova Kirchhoffova lineárně pružného materiálu Eν E Eν E S = E + E + E33 + E = E E + E = + ν ν + ν + ν ν + ν ( )( ) ( ) ( )( ) ( ν ) ( )( ) ( + ν)( ν) ( + ν) ( ) E( ) E λ ( )( ) Eν ( λ ) ( )( ) ( ) ( ) Eν E E = ( λ ) ν ( λ ) + ( λ ) = ν + λ = + ν ν ν ν ν ν Eν Eν E ν + E ν = ( λ ) ν + = ( λ ) ( + ν)( ν) Eν ν + ν ν ν = ( λ ) = ( ) + ν ν + ν ν ( )( ) ( ) =
130 Hyperelasticita Nerealističnost Saint-Venantova Kirchhoffova lineárně pružného materiálu - jednoosá napjatost S S ( ) ν ν = E λ P = FS ( + ν)( ν) [-] ( ν =. ) 03 E 3 P ( ) ν ν = Eλ λ ( + ν)( ν) P 0 λ [-]?
 referenční konfiguraci je tenzor napětí nulový a jeho druhé derivace (tenzor")

131 Hyperelasticita Racionalita W W J J W ( ) 0 W( ) 0 ( ) ( F) = ( U) = ( C) = ( E) W W W W ( I) W( I) W I = F P I = = 0 > Ο F F F V (beznapěťové) referenční konfiguraci je energie 0, během deformace je energie nezáporná, v (beznapěťové) referenční konfiguraci je tenzor napětí nulový a jeho druhé derivace (tenzor pružnosti, někdy též tuhosti) nezáporný ( F) W( F) ( F) + W( F) = det = det 0 ( QF) = W( F) Zde Q je nějaký ortogonální tenzor (det(q) = ±, Q T = Q - ) který představuje rotaci nebo zrcadlení. Ani rotace, ani zrcadlení nevedou ke změně deformační energie uložené v materiálu Důsledky předchozího při volbě Q = R, když F = RU


132 Hyperelasticita Racionalita W Konvexita (polykonvexita) Zajišťuje jednoznačnost a existenci řešení linearizované vlnové rovnice Zajišťuje existenci globálního minima Zajišťuje kladný přírůstek napětí při kladném přírůstku deformace Je v rozporu s chováním pozorovaným při ztrátě stability deformace
133 Hyperelasticita Tenzor pružnosti (též říkáme: tuhosti, elasticity, elastických modulů) σ ( ) W E σ Eε = = = Eε = ε ε ε ε α tg ( α ) dσ = = E dε ε
134 Hyperelasticita Tenzor pružnosti (tuhosti, elasticity, elastických modulů) σ σ 0 tg ( α) α ( ) dσ ε 0 = = dε E ( ε ) 0 E ( ε ) σ W = = konst ε ε. ε 0 ε
135 Hyperelasticita Tenzory pružnosti (tuhosti, elasticity, ) ( ) W ( F) P F A = = F F F A P W ik ikjl = FjL FjL FiK ( ) ( ) W( ) W( ) SE SC E C C = = = = 4 E C E E C C C KLMN SKL SKL W W = = = = 4 E C E E C C MN MN MN KL MN KL c ( b) W ( b) = = 4 b b b σ W c ijkl = 4J bim bnl bmj bkn b J b b c = J F F F F C ijkl ik jl km ln KLMN
136 Hyperelasticita HYPERELASTICKÝ EXISTUJE ELASTICKÝ POTENCIÁL W PRUŽNÝ C = C L IJKL K IJ tzv. hlavní symetrie Implicitně předpokládáme adiabatický izotermální děj Je-li materiál izotropní, existuje i tzv. vedlejší symetrie tenzoru pružnosti: C = C = C IJKL JIKL IJLK
 ( = 0) dσ ε = 0 = = tg ( α) > 0 dε α ε")
137 Hyperelasticita Počáteční modul pružnosti pro látku v pevné fázi musí být kladný σ E ( ε ) ( = 0) dσ ε = 0 = = tg ( α) > 0 dε α ε
138 Nestlačitelný hyperelastický materiál Pro deformace měkkých tkání, díky vysokému obsahu vody, často předpokládáme, že v rozsahu fyziologického zatěžování nemění svůj objem Podobně i chování elastomerních materiálů (kaučuky) bývá pokládáno v určitém rozsahu zatěžování za nestlačitelné v polymerní síti má elastické chování povahu vnitřní reakce na změny konfigurace sítě, tj. změny entropie vnitřní síly vznikající jako reakce na změnu objemu spojujeme s interakcí molekul mezi sebou, což je energeticky mnohem náročnější Velmi zjednodušeně: konají-li vnější síly práci, ta se projeví spíše přeuspořádáním makromolekulárních řetězců vůči sobě, než stlačováním řetězců mezi sebou
139 Nestlačitelný hyperelastický materiál Experimentální data pro styren-butadienový kaučuk při jednoosém tahu Merckel, Y., Diani, J., Brieu, M., & Caillard, J. (03). Constitutive modeling of the anisotropic behavior of mullins softened filled rubbers. Mechanics of Materials, 57,
140 Nestlačitelný hyperelastický materiál Nemění-li materiál objem, jsou posuvy, na kterých by složky hydrostatické napjatosti vykonaly práci, nulové. Tudíž z W(F) nelze získat složky hydrostatické napjatosti pomocí operace W F
141 Nestlačitelný hyperelastický materiál Postupujeme metodou (neurčitého) Lagrangeova multiplikátoru p. Hustotu deformační energie W modifikujeme do tvaru ( F) ( ) W = W p J kde J = Konstitutivní rovnice pak mají tvar: W σ = pi+ F F T P T W pf F W W = + = + + C E = + S pc p( E I) p se určí pomocí silové okrajové podmínky

 rr i")
142 Nestlačitelný hyperelastický materiál p se určí pomocí silové okrajové podmínky W = 0 p = 0 σ 33 λ 3 λ 3 3 σ W r = r = P λ p= P λ r = r ( ) rr i rr rr i

143 Modely pro W Nyní se konečně dostaneme k tomu, abychom projasnili, co se může skrývat pod výrazem typu W λ W musí samozřejmě mít takovou matematickou formu, aby odpovídalo pozorování
144 Modely pro W Jednoosá tahová zkouška latexu (LRG Treloar 944) Smluvní napětí [kpa] Axiální streč λ [-]
, 5-35. http://rsif.")
, 90-30. http://www.")
145 Modely pro W Výsledky jednoosé tahové zkoušky s vrstvami lidské břišní aorty (F80) Gasser, T. C., Ogden, R. W., & Holzapfel, G. A. (006). Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. Journal of the Royal Society Interface, 3(6), /579/530wm/C0057-Human_ artery_wall_cross-section._lm-spl.jpg Holzapfel, G. A. (006). Determination of material models for arterial walls from uniaxial extension tests and histological structure. Journal of Theoretical Biology, 38(),
146 Modely pro W Neo-hookeovský materiál (40. léta) Jde o elementární model, který v zásadě reprodukuje lineární chování při konečných deformacích Tento model je možné interpretovat pomocí statistické fyziky polymerních řetězců, když předpokládáme gaussovskou hustotu pravděpodobnosti pro rozložení koncových poloh polymerních řetězců při deformaci W µ = ( I ) 3 T C= FF I ( C) = tr = λ + λ + λ 3 I = tr ( C) tr ( C ) λλ λλ 3 λλ 3 = + + I = det = λλλ ( C) 3 3
147 Modely pro W Neo-hookeovský materiál W µ = ( I ) 3 NkT ρrt µ = = nkt = > V M 0 µ počáteční smykový modul pružnosti N počet řetězců v objemu V objem vzorku n objemová hustota řetezců k Boltzmannova konstanta T termodynamická teplota ρ hustota hmotnosti R univerzální plynová konstanta M s průměrná molární hmotnost řetězce Analogie s ideálním plynem nrt P = = V ρrt M
148 Modely pro W Neo-hookeovský nestlačitelný materiál při jednoosém tahu W = ( I 3) µ W σ = pi+ F F T W = p σ λ λ W = p σ λ λ W = p σ3 λ3 λ 3 µ σ = λ λ + λ + λ p= λ µ p ( ) 3 λ µ σ = λ λ + λ + λ p= λ µ p ( ) 3 λ µ σ = λ λ + λ + λ p= λ µ p ( ) λ 3 σ = 0 p = λµ 3 3 ( C) 3 J = det = λλλ = λ = λ3 λ = λ = 3 λ σ = µλ µ λ
149 Modely pro W Neo-hookeovský nestlačitelný materiál při jednoosém tahu W = ( I 3) µ σ = µλ P S = µλ λ µ = µ λ 3 µ λ µ P /µ [-] Axiální streč λ [-]
 Neo-hookevský model nedokáže zachytit large strain stiffenning Tato")

150 Modely pro W Neo-hookeovský nestlačitelný materiál při jednoosém tahu W = ( I 3) Neo-hookevský model nedokáže zachytit large strain stiffenning Tato skutečnost souvisí s tím, že při velkých deformacích nelze použít gaussovskou hustotu pravděpodobnosti pro popis polohy koncových bodů molekulárních řetězců µ
 ( )( 3) µ > 0 0 < α ( 3) ( 3) W =")
, americký")
151 Modely pro W Mooneyův-Rivlinův model 40. léta µ W = α I + α I ( 3) ( )( 3) µ > 0 0 < α ( 3) ( 3) W = c I + c I Melvin Mooney ( ), americký fyzik s výsledky v oblasti mechanických vlastností pryží
,")
152 Ronald Rivlin a nelineární kontinuum Ronald Samuel Rivlin byl osobností, která zásadně formovala aparát nelineární mechaniky kontinua matematický popis nelineárních materiálů, a ne-newtonských kapalin absolvent St John s College Cambridge působil na Brown University, Lehigh University získal celou řadu ocenění - Timošenkovu, Goodyearovu, von Karmanovu medaili Ronald Samuel Rivlin (95-005), narozen v UK, stal se v r. 955 občanem USA
153 Modely pro W µ α α Mooneyův-Rivlinův model W = ( I 3) + ( )( I 3) W σ = pi+ F F T W = p σ λ λ W = p σ λ λ W = p σ3 λ3 λ 3 µ σ = λ α( λ + λ + λ 3) + ( α)( λ λ + λ λ + λ λ 3) p= µλ αλ + ( α)( λλ + λλ ) p λ µ σ = λ α( λ + λ + λ 3) + ( α)( λ λ + λ λ + λ λ 3) p= µλ αλ + ( α)( λ λ + λ λ ) p λ µ σ = λ α( λ + λ λ 3) ( α)( λλ λλ λλ 3) p µλ αλ ( α)( λλ λλ ) = + + p λ3 ( C) 3 J = det = λλλ = λ λ3 = λ = λ3 = ( )( σ p = µλ ) 3αλ3+ α λλ 3 + λλ 3 = 0 3 λ ( ) ( ) σ = αµλ + µ α λ αµλ + µ α λ
 ( ) P = αµλ + µ α αµλ + µ α λ 3 P /µ [-] Axiální streč λ [-] α = (neo-hooke) α = 0.8 α = 0.")
154 Modely pro W µ α α Mooneyův-Rivlinův model W = ( I 3) + ( )( I 3) ( ) ( ) σ = αµλ + µ α λ αµλ + µ α λ P = Jσ F T ( ) ( ) P = αµλ + µ α αµλ + µ α λ 3 P /µ [-] Axiální streč λ [-] α = (neo-hooke) α = 0.8 α = 0.5 α = 0.
155 Modely pro W Zobecněný Rivlinův model začátek 50. let n ( ) i ( ) j = ij 00 = i, j= 0 W c I 3 I 3 c 0 c = kpa c = 0. 5 kpa c = 0. 5 kpa P [kpa] Axiální streč λ [-]
156 Modely pro W Ogdenův model (97) Profesor R.W. Ogden působí na univerzitě v Glasgow, obor aplikovaná matematika µ = kpa µ = kpa µ = kpaα =. 46 α =. 03 α = P [kpa] W n k = µ k λ λ λ k ( α ) k α k α 3 k 3 = + + α Axiální streč λ [-] n k = αµ = µ > 0 k k α α α3 α α α3 P = µλ + µλ + µλ 3 µλ µλ + µλ 3
 byl profesorem na univerzitě v Akronu (Ohio, USA), kde se zabýval vlastnostmi kaučuků (nestability, kavitace, materiálové modely) W µ J m 3 ln I = J m J > 0 µ > 0 m Model patří do skupiny")
157 Modely pro W Gentův model (996) A.N. Gent (97-0) byl profesorem na univerzitě v Akronu (Ohio, USA), kde se zabýval vlastnostmi kaučuků (nestability, kavitace, materiálové modely) W µ J m 3 ln I = J m J > 0 µ > 0 m Model patří do skupiny tzv. limiting extensibility models Zřejmě nejsou přípustné všechny kinematiky (trajektorie ve fázovém prostoru deformací) events/news-detail.dot?newsid=0f a7-40b-ad7a-63785becea&pagetitle=r ecent%0headlines&crumbtitle=in%0the%0 world%0of%0polymer%0science,%0alan% 0Neville%0Gent%0was%0a%0giant
158 Modely pro W µ J ln = Jm m I 3 Gentův model W I 3 J I + 3 m 0 < = 0 < Jm I+ 3 I < Jm + 3 Jm Jm ( = ) W J m µ [ ] I λ λ λ = + + [ ] 3
159 Modely pro W µ J ln = Jm m I 3 Gentův model W µ J λ σ = p m J m ( λ λ λ3 ) µ J λ σ = p m J m ( λ λ λ3 ) µ J λ σ = p m 3 3 J m ( λ λ λ3 ) σ 3 = 0 p = J m ( C) 3 µ J λ m 3 ( λ λ λ3 ) J = det = λλλ = λ = λ3 λ = λ = 3 λ P µ J λ µ J m m = J 3 m + λ λ J m 3 λ λ + λ
160 Modely pro W µ J ln = Jm m I 3 Gentův model W P µ J λ µ J m m = J 3 m + λ λ J m 3 λ λ + λ µ = kpa J = = 0 J = 00 µ = kpa µ = 0 kpa µ = 00 kpa = 0 m J m m J m P [kpa] P [kpa] Axiální streč λ [-] Axiální streč λ [-]
161 Modely pro W µ J ln = Jm m I 3 Gentův model W P µ J λ µ J m m = J 3 m + λ λ J m 3 λ λ + λ P [kpa] Axiální streč λ [-] Axiální streč λ [-] J m + 3 λ = 0 λ < λ < < λ < < λ < 0. 4 J m [-]
162 Modely pro W Exponenciální modely Y.C. Fung W c = ( Q e ) Q= b E + b E + b E + b E + b E + b E + b E E + b E E + b E E E= F F I = C I ( T ) ( ) Y.C. Fung je v podstatě zakladatel biomechaniky jako moderního vědního oboru. Je emeritním profesorem UC San Diego, autorem několika monografií o biomechanice
163 Modely pro W Exponenciální modely ( Q W = e ) Jsou založeny na Fungově pozorování, publikovaném okolo 967, získaném při tahových zkouškách měkkých tkání, které ho vedlo k závěru, že modul pružnosti je lineární funkcí napětí dσ a E = = a+ bσ σ = e dλ b y = a + by ( ) ( ) y 0 = 0 y 0 = Eini Biorheology. 973 Jun;0(): Biorheology of soft tissues. Fung YC. c ( b( λ ) ) Přírůstek P při konstantním λ [g] Králičí papilární sval Smluvní napětí P [g]
164 Modely pro W Exponenciální modely W µ = α ( ( I ) ) e α 3 µ α( λ + λ+ λ3 3) α( λ + λ+ λ3 3) σ = λ e p= µλe p α λ µ α( λ + λ+ λ3 3) α( λ + λ+ λ3 3) σ = λ e p= µλe p α λ µ α( λ + λ+ λ3 3) α( λ + λ+ λ3 3) σ 3 = λ 3 e p= µλ3e p α λ 3 σ 3 = 0 ( C) 3 J = det = λλλ = λ = λ3 λ = λ = 3 ( 3 3) p e α λ + µλ λ + λ = λ P e α λ λ = µ λ λ

165 Modely pro W Exponenciální modely W µ = α ( ( I ) ) e α P e α λ λ = µ λ λ µ = kpa µ = 0 kpa µ = 00 kpa α = α = α = 5 α = 0 µ = kpa P [kpa] P [kpa] Axiální streč λ [-] Axiální streč λ [-]
166 Modely pro W Kilianův model (van der Waals) H. G. Kilian Ulm, Max Planck Institut ( ) ( ) ( ) W = λ 3 3 ( ) m µ ln η λ m µη µ a β I + βi 3 6 ( ) 3 η = β I + βi 3 ( ) λ m 3
167 Modely pro W Kilianův model (van der Waals) H. G. Kilian Ulm, Max Planck Institut W = µ J m I 3 ln Jm W ( ) I I ( ) β + β 3 β I+ βi 3 = µ Jmln µ Jm µ a ( β ) β J m Jm 6 ( I + I 3) 3 J I m = λ 3 m ( ) β I 3 [ ] s. I kd 3 v β + e β 0;
168 Modely pro W Kilianův model (van der Waals) Jednoosý tah pro nestlačitelný případ ( ) I I ( ) β + β 3 β I+ βi 3 W = µ Jmln µ Jm µ a β J m Jm 6 (( β ) I+ I 3) 3 J m = λ 3 m σ [MPa] Axiální streč λ [-] λ m =.9 λ m =.4 λ m =.9 λ m = 3.4 λ m = 3.9 λ m = 4.4 λ m = 4.9 λ m = 5.4 λ m = 5.9 λ m = 6.4 λ m = 6.9 µ = MPa β = a = 0.7 σ [MPa] Axiální streč λ [-] β = 0 β = 0. β = 0. β = 0.3 β = 0.4 β = 0.5 β = 0.6 β = 0.7 β = 0.8 β = 0.9 β = µ = MPa λ m = 5 a = 0.5
169 Modely pro W Kilianův model (van der Waals) Jednoosý tah pro nestlačitelný případ σ [MPa] Axiální streč λ [-] ( ) I I ( ) β + β 3 β I+ βi 3 W = µ Jmln µ Jm µ a β J m Jm 6 a = 0 a = 0. a = 0.4 a = 0.6 a = 0.8 a = a =. a =.4 a =.6 a =.8 a = µ = MPa β = 0 λ m = 5 σ [MPa] (( β ) I+ I 3) 3 Axiální streč λ [-] J m = λ 3 m a = 0 a = 0. a = 0.4 a = 0.6 a = 0.8 a = a =. a =.4 a =.6 a =.8 a = µ = MPa β = λ m = 5
170 Modely pro W Kilianův model (van der Waals) Jednoosý tah pro nestlačitelný případ ( ) I I ( ) 3 β + β 3 β I+ βi 3 J W = µ mln µ Jm µ a (( β ) I+ β I 3) Jm = λm 3 J m Jm 6 σ [MPa] Axiální streč λ [-] a = 0 a = - a = -4 a = -6 a = -8 a = -0 a = - a = -4 a = -6 a = -8 a = -0 µ = MPa β = 0.5 λ m = 5

 W = µ N βλc N ln sinh")
171 Modely pro W Arruda-Boyce model 993 Ellen M. Arruda (University of Michigan, Ann Arbor) W = µ N βλc N ln sinh β β Mary C. Boyce (MIT)
172 Modely pro W Arruda-Boyce model 993 uvažuje průměrování na 8-řatězcový element W = µ N βλc N ln sinh β β λ c I λ + λ + λ = = 3 3 3
173 Modely pro W Arruda-Boyce model 993 pomocí L(x) zohledňuje limitní průtažnost molekulárního řetězce W = µ N βλc N ln sinh β β β λ L N c = L x = coth x ( ) ( ) x
174 Modely pro W Arruda-Boyce model 993 pomocí L(x) zohledňuje limitní průtažnost molekulárního řetězce W = µ N βλc N ln sinh β β β λ L N c = L x ( ) x 3 x x


175 Modely pro W Arruda-Boyce model 993 pomocí L(x) zohledňuje limitní průtažnost molekulárního řetězce
176 Cvičení

177 Cv. Odhad parametrů modelu W. Jednoosá tahová zkouška pryže
178 Cv. Odhad parametrů modelu W Jednoosá tahová zkouška pryže Experiment byl proveden na odboru biomechaniky U05 ČVUT FS Jeho záznam je na obrázku Zdrojová data jsou na adrese Počáteční rozměry proužku byly Šířka W 5.5 mm Tloušťka H.85 mm Síla [N] Inženýrská deformace ε [-]
179 Cv. Odhad parametrů modelu W Odhad je založen na minimalizaci o druhých mocnin (čtverců) odchylek mezi modelem a pozorováním. Obor, který se zabývá odhadem parametrů se jmenuje regresní analýza (vyrovnávací počet). Sestavíme účelovou funkci Q, kterou minimalizujeme nějakou ze známých optimalizačních metod (hledání extrému funkce jedné nebo více proměnných)
180 Cv. Odhad parametrů modelu W n ( ( x, ) ) j,.., k j Q= f c c y j= MODEL ( x,,.., ) y = f c c (např. ) y x j j k...funkce předpovídíající/modelující/simulující relalitu µ σ = µλ λ... j-tá pozorovaná hodnota závisle proměnné (např. σ )... j-tá pozorovaná hodnota nezávisle proměnné (např. c,.., ck...hledané parametry modelu (např. µ ) [ λ λ λ ] 3 )
181 Cv. Odhad parametrů modelu W n ( ( x, ) ) j,.., k j Q= f c c y j= Minimalizací Q zjistíme [ c,..., c ], která je odhadem [ c,..., c ] k k Stacionární bod Q, který bude pro kvadratické Q minimem, splňuje podmínku: Q c Q = 0 = 0 [ c c ],...,,..., k ck Řešením soustavy odhadneme parametry W.
182 Cv. Odhad parametrů modelu W R SSres =...Koeficient determinace SS total n ( ( x, ) ),.., SS = f c c y res j k j j= n ( ( ) ) SS = Mean y y total j j j=...nazýváme reziduální součet čtverců...nazýváme celkový součet čtverců
183 Cv. Odhad parametrů modelu W Data [-,3.5] [-,] [-0.,0.] [0.5,0.] [,.] [.5,.8] [,3.6] (, ) = ax f a x SS SS R res total a = = =. 08 = ( ) ( j j) Q = Q a = ax y = j= ( ( ) ) ( ) ( ) ( ( ) ) = a a + a ( a ) ( a. ) ( a5. 8. ) ( a 36. )
184 Cv. Odhad parametrů modelu W Jednoosá tahová zkouška pryže µ = MPa J m = 0.60 Koeficient determinace R = W µ J m 3 ln I = J m
185 Cv. Odhad parametrů modelu W Jednoosá tahová zkouška pryže c = MPa, c = MPa, c 3 = Mpa Koeficient determinace R = ( 3) ( 3) ( 3) 3 W = c I + c I + c I 3
186 Cv. Odhad parametrů modelu W Jednoosá tahová zkouška pryže µ = 7.46 MPa, µ = MPa, µ =.0 MPa, α = , α = 9.600, α 3 = Koeficient determinace R = W 3 k= µ k λ λ λ k ( α ) k αk αk 3 3 = + + α
187 Cv. Odhad parametrů modelu W Jednoosá tahová zkouška pryže ( ) µ = MPa, λ m = 4.08, β = 0, a = Koeficient determinace R = ( ) β I + βi 3 β I + βi 3 W = µ ( λ m 3) ln µ ( λ m 3) µ a β I + βi 3 (( ) ) 3 λm 3 λm 3 6 σ [MPa] Axiální streč λ [-]
188 Cv. Simulace jednoosé tahové zkoušky cévy Jednoosá tahová zkouška anizotropního materiálu Nasimulujte odezvu materiálu střední vrstvy stěny lidské aorty při jednoosém tahu. Pro popis chování materiálu použijte model publikovaný v: G.A. Holzapfel (006) Determination of material models for arterial walls from uniaxial extension tests and histological structure. Journal of Theoretical Biology, 38: µ c ΘΘ ZZ 3 ΘΘ ( ) ( be + b E + be E ) 3 ZZ W = Wiso + Waniso = I + e µ = 3. 4 kpa c= 0. 4 kpa b = 3. 8 b = 3. 5 b =

189 Cv. Simulace jednoosé tahové zkoušky cévy Jednoosá tahová zkouška anizotropního materiálu R Θ R R Θ Z Θ
190 Cv. Simulace jednoosé tahové zkoušky cévy. Jednoosá tahová zkouška anizotropního materiálu. Nejprve dosadíme za Green-Lagrangeovy strainy E streče, když předpokládáme λr 0 0 T F = 0 λθ 0 E= ( F F I ) EKK = ( λk ) K = R, Θ, Z 0 0 λ Z. Získáme konstitutivní rovnici 3. Eliminujeme p pomocí σ rr = 0 W σ kk = λ K p k = r, θ, zk ; = R, Θ, Z λ K 4. Aplikujeme nestlačitelnost λr = λλ Θ Z
191 Cv. Simulace jednoosé tahové zkoušky cévy Jednoosá tahová zkouška anizotropního materiálu 5. Složky napětí jsou funkce dvou proměnných, dík anizotropii materiálu (, ) (, ) σ = σ λ λ σ = σ λ λ θθ θθ Θ Z zz zz Θ Z K výpočtu neznámého příčného streče (streč ve směru zkoušky volíme) použijeme okrajovou podmínku nulovosti příčného napětí. Tj. je-li zkouška ve směru λ Θ, λ Z vypočteme z rovnice σ zz (λ Z ) = 0 pro zvolenou hodnotu λ Θ. Skutečné napětí σ [kpa] Úlohu musíme řešit numericky v dostatečném počtu bodů, aby výsledné křivky vypadaly hladce
192 Cv. 3 Simulace tahové zkoušky D vs D Předpověď chování při D rovnoosém tahu izotropní pryže ( ) µ = MPa, λ m = 4.08, β = 0, a = ( ) β I + βi 3 β I + βi 3 W = µ ( λ m 3) ln µ ( λ m 3) µ a β I + βi 3 (( ) ) 3 λm 3 λm 3 6 σ 33 = 0 σ = σ λ = λ σ = σ λ = λ σ σ σ W = λ λ W = λ λ W = λ λ 33 p p p
 = λ λ W 33 λ λ33 33 = λ λ λ 33 = λ λ λ W W W W σ ( λ) = λ λ = λ λ 33 33 λ λ33 λ λ λ λ λ33 λ = λλ = λ λ λ λ λ = λλ = λ 33 = 33,")
193 Cv. 3 Simulace tahové zkoušky D vs D Předpověď chování při D rovnoosém tahu izotropní pryže p = λ 33 W λ 33 W σ ( λ, λ ) = λ λ W 33 λ λ33 W σ ( λ, λ ) = λ λ W 33 λ λ33 33 = λ λ λ 33 = λ λ λ W W W W σ ( λ) = λ λ = λ λ λ λ33 λ λ λ λ λ33 λ = λλ = λ λ λ λ λ = λλ = λ 33 = 33, =,
194 Cv. 3 Simulace tahové zkoušky D vs D Předpověď chování při D rovnoosém tahu izotropní pryže vs. D tah σ 0 0 λ 0 0 σ = 0 σ 0 F = 0 λ λ σ [MPa] σ 0 0 σ = F λ 0 0 = 0 λ λ D vs D stav napjatosti! Streč λ [-] D λ max D λ max.903
195 Cv. 4 Inflační nestabilita nelineární trubice Inflace-extenze válcové trubice Nasimulujte odezvu uzavřené tenkostěnné válcové trubice, která je nafukována vnitřním tlakem P. Trubici považujte za dostatečně dlouhou, aby odezněly okrajové poruchy (ohybové momenty vzniklé připojením dna). Zabývejte se pouze odezvou ve střední části trubice. Uvažujte materiál s Gentovým modelem W pro J m = 0 a 5. W µ J m I 3 = ln J m
196 Cv. 4 Inflace a extenze válcové trubice Válcová membránová skořepina Referenční konfigurace r = λ R z = λ Z h = λ H θθ zz rr HH RR Průběžná konfigurace LL P ext = 0 PPPPrr ii FF rrrrrr F h H λrr r = 0 λθ Θ = R 0 0 λ zz l 0 0 L rr P int = P h ll
197 Cv. 4 Inflační nestabilita nelineární trubice F F r t F z = 0 σ = 0 rr = 0 σ = = 0 σ = tt zz Pr h Pr h σ σ σ rr θθ zz W = 0 λrr p = 0 λ Pr W Pr = λθ Θ p = h λ h Pr W Pr = λzz p = h λ h rr θθ zz
198 Cv. 4 Inflační nestabilita nelineární trubice σ rr = 0 p = µλ rr rr θθ zz λ + λ + λ 3 J m λ rr = λ λ θ Θ zz J J µλ θθjm µ Jm Pλθ ΘλθΘλzZ R = H + λ + λ 3 λ λ + λ + λ 3 m θθ zz θθ zz J m θ zz λθ λ Θ Θ zz λθ ΘλzZ µλ zz Jm µ Jm Pλθ ΘλθΘλ = H + λ + λ 3 λ λ + λ + λ 3 m θθ zz θθ zz J m θ zz λθ λ Θ Θ zz λθ ΘλzZ zz R
199 Cv. 4 Inflační nestabilita nelineární trubice Nakonec celou soustavu normalizujeme µ (tj. podělíme) a zavedeme součinitel tenkonstěnnosti ε = H/R. Rovnice jsou nyní bezrozměrné! Soustavu řešíme následujícím způsobem: () Zvolíme λ θθ () Rovnice řešíme pro neurčité P a λ zz (3) Postup opakujeme v takovém počtu a s tak jemným krokem pro λ θθ, abychom získali dostatečně hladké křivky
200 Cv. 4 Inflační nestabilita nelineární trubice
201 Cv. 4 Inflační nestabilita nelineární trubice Oblasti kinematicky přípustných deformací pro J m = 0 a 5 a stopa inflace ve fázovém prostoru
202 Cv. 4 Inflační nestabilita nelineární trubice Získaná řešení pro oblast po ztrátě stability nafukování musíme považovat pouze přibližná, protože výpočty jsme provedli za předpokladu válcovitosti trubice. Experimentálně lze ale ověřit, že za mezí stability dochází ke změně způsobu deformace: Rovnoměrná inflace válce přejde jedné z následujících možností: vydutí (bulging), vzepření (průhyb jako u ztráty stability prutu). U vydutí je navíc možno rozlišit mezi: axiálním šířením výduti při konstantním poloměru ve střední části výduti, nebo nerovnoměrným nafukováním výduti.
203 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? Nejprve si odvodíme elementární vzorec pro šíření tlakové vlny trubicí. Obecně jde o poměrně obtížnou úlohu, a tak přijmeme několik zjednodušujících předpokladů. Geometrie bude tenká válcová trubice Vlna bude dlouhá a její čelo bude do délky růst jen pozvolně Kapalina bude ideální (nestlačitelná, nevazká) Setrvačná síla daná zrychlením stěny trubice bude zanedbatelná proti setrvačné síle kapaliny
204 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? P( z) P A A A z P z P z dz A z dz P z dz Adza z z z z ( ) ( ) ( ) + ( ) + + ( ) = ρ ( ) P( z ) P( z) A( z ) P( z) A( z) dz v( z) P + z A + dz z dz Síla zleva Síla zprava Příspěvek síly od stěn Setrvačná síla P( z) A( z ) A( z) dz da A P = P dz z α da = da A dz z
205 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? P( z) P A A A z P z P z dz A z dz P z dz Adza z z z z ( ) ( ) ( ) + ( ) + + ( ) = ρ ( ) P( z ) P( z) P + z dz Korektní výpočet zrychlení vyžaduje materiálovou derivaci A( z ) P( z) A( z) dz A + z dz a Dv v v = = + v Dt t z v( z)
206 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? Silová rovnováha tedy říká, že P A A A z P z P z dz A z dz P z dz Adza z z z z ( ) ( ) ( ) + ( ) + + ( ) = ρ ( ) v v P + v + = t z ρ z 0

207 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? Připomeňme si, že silová rovnováha je obecně obsažena v bilanci hybnosti, kterou pro lineárně vazkou kapalinu obvykle píšeme ve formě Navierových-Stokesových rovnic. Pro případ nestlačitelné kapaliny píšeme: v + grad = grad P + div grad + grad t ρ ρ Materiálová derivace D v Dt µ T ( ) ( v) v ( ) ( v) ( v) Vektor rychlosti proudění Pro nevazkou kapalinu 0 v = 0 v µ = 0
208 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? Bilance hmoty vede k rovnici kontinuity pro nestlačitelnou kapalinu ve formě (jde nám o vtok a výtok hmoty + v čase se pohybující hranici): va A dt t va va + z dz va z va A ρva = ρva + dz + dz z t A + = 0 t dz
: r = λ R")
209 Cv. 5 Jak rychle se šíří tlaková vlna trubicí? Pokračujme v úpravách rovnici kontinuity. Předpokládejme, že při průchodu tlakového pulsu se trubice deformuje jako uzavřená válcová membránová skořepina, u níž zanedbáváme okrajové efekty (vetknutí): r = λ R z = λ Z h = λ H θθ zz rr F h H λrr r = 0 λθ Θ = R 0 0 λ zz l 0 0 L
Biomechanika srdečněcévnísoustavy a konstitutivnímodelování
 Biomechanika srdečněcévnísoustavy a konstitutivnímodelování Biomechanika a lékařsképřístroje Biomechanika I LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní ČVUT v Praze M Konstitutivní
Biomechanika srdečněcévnísoustavy a konstitutivnímodelování Biomechanika a lékařsképřístroje Biomechanika I LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní ČVUT v Praze M Konstitutivní
Biomechanika a lékařské přístroje
 Biomechanika a lékařské přístroje Projekt II Lukáš Horný lukas.horny@fs.cvut.cz Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS 2018 Projekt II: O co nám půjde? Otázky odpovědi Konstrukce model konstrukce
Biomechanika a lékařské přístroje Projekt II Lukáš Horný lukas.horny@fs.cvut.cz Ústav mechaniky, biomechaniky a mechatroniky, ČVUT FS 2018 Projekt II: O co nám půjde? Otázky odpovědi Konstrukce model konstrukce
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů
 Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
Biomechanika II. Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti. Lukáš Horný
 Biomechanika II Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské
Biomechanika II Modely napjatosti a deformace cév, vliv zbytkových napětí a aktivní vlastnosti ČVUT v Praze, fakulta strojní, ústav mechaniky, biomechaniky a mechatroniky Obor: Biomechanika a lékařské
8 Elasticita kaučukových sítí
 8 Elasticita kaučukových sítí Elastomerní polymerní látky (např. kaučuky) tvoří ze / chemické příčné vazby a / fyzikální uzly. Vyznačují se schopností deformovat se již malou silou nejméně o 00 % své původní
8 Elasticita kaučukových sítí Elastomerní polymerní látky (např. kaučuky) tvoří ze / chemické příčné vazby a / fyzikální uzly. Vyznačují se schopností deformovat se již malou silou nejméně o 00 % své původní
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů
 Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
Modelovánía experimentální zjišťovánímechanických vlastností nelineárních materiálů Biomechanika a lékařsképřístroje Projekt II LukášHorný Laboratoř biomechaniky člověka Ústavu mechaniky Fakulty strojní
Nelineární problémy a MKP
 Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Nelineární problémy a MKP Základní druhy nelinearit v mechanice tuhých těles: 1. materiálová (plasticita, viskoelasticita, viskoplasticita,...) 2. geometrická (velké posuvy a natočení, stabilita konstrukcí)
Vlastnosti a zkoušení materiálů. Přednáška č.4 Úvod do pružnosti a pevnosti
 Vlastnosti a zkoušení materiálů Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze
Vlastnosti a zkoušení materiálů Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze
Polární rozklad deformačního gradientu a tenzory přetvoření
 Polární rozklad deformačního gradientu a tenzory přetvoření https://en.wikipedia.org/wiki/finite_strain_theory Deformační gradient Musí tedy existovat jednoznačné zobrazení konfigurace : 1 t t x X, a inversní
Polární rozklad deformačního gradientu a tenzory přetvoření https://en.wikipedia.org/wiki/finite_strain_theory Deformační gradient Musí tedy existovat jednoznačné zobrazení konfigurace : 1 t t x X, a inversní
Rozdíly mezi MKP a MHP, oblasti jejich využití.
 Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Rozdíly mezi, oblasti jejich využití. Obě metody jsou vhodné pro určitou oblast problémů. základě MKP vyžaduje rozdělení těles na vhodný počet prvků, jejichž analýza je poměrně snadná a pro většinu částí
Analýza napjatosti PLASTICITA
 Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
Analýza napjatosti PLASTICITA TENZOR NAPĚTÍ Teplota v daném bodě je skalár, je to tenzor nultého řádu, který nezávisí na změně souřadného systému Síla je vektor, je to tenzor prvního řádu, v trojrozměrném
Kap. 3 Makromechanika kompozitních materiálů
 Kap. Makromechanika kompozitních materiálů Informační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky FS ČVU v Praze. listopadu 7 Základní pojmy a vztahy Notace
Kap. Makromechanika kompozitních materiálů Informační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky FS ČVU v Praze. listopadu 7 Základní pojmy a vztahy Notace
ÚVOD DO MODELOVÁNÍ V MECHANICE
 ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
ÚVOD DO MODELOVÁNÍ V MECHANICE PRUŽNOST A PEVNOST Přednáška č. 5 Prof. Ing. Vladislav Laš. CSc. MECHANIKA PODDAJNÝCH TĚLES Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, které
7 Lineární elasticita
 7 Lineární elasticita Elasticita je schopnost materiálu pružně se deformovat. Deformace ideálně elastických látek je okamžitá (časově nezávislá) a dokonale vratná. Působí-li na infinitezimální objemový
7 Lineární elasticita Elasticita je schopnost materiálu pružně se deformovat. Deformace ideálně elastických látek je okamžitá (časově nezávislá) a dokonale vratná. Působí-li na infinitezimální objemový
KONSTITUČNÍ VZTAHY. 1. Tahová zkouška
 1. Tahová zkouška Tahová zkouška se provádí dle ČSN EN ISO 6892-1 (aktualizována v roce 2010) Je nejčastější mechanickou zkouškou kovových materiálů. Zkoušky se realizují na trhacích strojích, kde se zkušební
1. Tahová zkouška Tahová zkouška se provádí dle ČSN EN ISO 6892-1 (aktualizována v roce 2010) Je nejčastější mechanickou zkouškou kovových materiálů. Zkoušky se realizují na trhacích strojích, kde se zkušební
7. Základní formulace lineární PP
 p07 1 7. Základní formulace lineární PP Podle tvaru závislosti mezi vnějšími silami a deformačně napěťovými parametry tělesa dělíme pružnost a pevnost na lineární a nelineární. Lineární pružnost vyšetřuje
p07 1 7. Základní formulace lineární PP Podle tvaru závislosti mezi vnějšími silami a deformačně napěťovými parametry tělesa dělíme pružnost a pevnost na lineární a nelineární. Lineární pružnost vyšetřuje
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6
 OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
OTÁZKY K PROCVIČOVÁNÍ PRUŽNOST A PLASTICITA II - DD6 POSUZOVÁNÍ KONSTRUKCÍ PODLE EUROKÓDŮ 1. Jaké mezní stavy rozlišujeme při posuzování konstrukcí podle EN? 2. Jaké problémy řeší mezní stav únosnosti
Autor: Vladimír Švehla
 Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
Bulletin of Applied Mechanics 1, 55 64 (2005) 55 Využití Castiglianovy věty při výpočtu deformací staticky určité případy zatížení tahem a tlakem Autor: Vladimír Švehla České vysoké učení technické, akulta
Mechanika kontinua. Mechanika elastických těles Mechanika kapalin
 Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
Mechanika kontinua Mechanika elastických těles Mechanika kapalin Mechanika kontinua Mechanika elastických těles Mechanika kapalin a plynů Kinematika tekutin Hydrostatika Hydrodynamika Kontinuum Pro vyšetřování
Pružnost a pevnost I
 Stránka 1 teoretické otázk 2007 Ing. Tomáš PROFANT, Ph.D. verze 1.1 OBSAH: 1. Tenzor napětí 2. Věta o sdruženosti smkových napětí 3. Saint Venantův princip 4. Tenzor deformace (přetvoření) 5. Geometrická
Stránka 1 teoretické otázk 2007 Ing. Tomáš PROFANT, Ph.D. verze 1.1 OBSAH: 1. Tenzor napětí 2. Věta o sdruženosti smkových napětí 3. Saint Venantův princip 4. Tenzor deformace (přetvoření) 5. Geometrická
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
10 Funkce více proměnných
 M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
16. Matematický popis napjatosti
 p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
p16 1 16. Matematický popis napjatosti Napjatost v bodě tělesa jsme definovali jako množinu obecných napětí ve všech řezech, které lze daným bodem tělesa vést. Pro jednoznačný matematický popis napjatosti
Přednáška 08. Obecná trojosá napjatost
 Přednáška 8 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův zákon Objemový modul pružnosti Oedometrický modul pružnosti Hlavní napětí, hlavní deformace
Přednáška 8 Obecná trojosá napjatost Napětí statické rovnice Deformace geometrické rovnice Zobecněný Hookeův zákon Objemový modul pružnosti Oedometrický modul pružnosti Hlavní napětí, hlavní deformace
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
Nauka o materiálu. Přednáška č.4 Úvod do pružnosti a pevnosti
 Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Nauka o materiálu Přednáška č.4 Úvod do pružnosti a pevnosti Teoretická a skutečná pevnost kovů Trvalá deformace polykrystalů začíná při vyšším napětí než u monokrystalů, tj. hodnota meze kluzu R e, odpovídající
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
1.1 Shrnutí základních poznatků
 1.1 Shrnutí základních poznatků Pojmem nádoba obvykle označujeme součásti strojů a zařízení, které jsou svým tvarem a charakterem namáhání shodné s dutými tělesy zatíženými vnitřním, popř. i vnějším tlakem.sohledemnatopovažujemezanádobyrůznápotrubíakotlovátělesa,alenapř.i
1.1 Shrnutí základních poznatků Pojmem nádoba obvykle označujeme součásti strojů a zařízení, které jsou svým tvarem a charakterem namáhání shodné s dutými tělesy zatíženými vnitřním, popř. i vnějším tlakem.sohledemnatopovažujemezanádobyrůznápotrubíakotlovátělesa,alenapř.i
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Úvod do lineární algebry
 Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Úvod do lineární algebry 1 Aritmetické vektory Definice 11 Mějme n N a utvořme kartézský součin R n R R R Každou uspořádanou n tici x 1 x 2 x, x n budeme nazývat n rozměrným aritmetickým vektorem Prvky
Napěťový vektor 3d. Díky Wikipedia za obrázek. n n n
 Míry napětí Napěťový vektor 3d n n2 2 n,. n n n Zatížené těleso rozdělíme myšleným řezem na dvě části. Na malou plošku v okolí materiálového bodu P působí napěťový vektor (n) (n, x, t), který je spojitou
Míry napětí Napěťový vektor 3d n n2 2 n,. n n n Zatížené těleso rozdělíme myšleným řezem na dvě části. Na malou plošku v okolí materiálového bodu P působí napěťový vektor (n) (n, x, t), který je spojitou
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
PRUŽNOST A PEVNOST II
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ PRUŽNOST A PEVNOST II Navazující magisterské studium, 1. ročník Alois Materna (přednášky) Jiří Brožovský (cvičení) Kancelář: LP C 303/1
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ PRUŽNOST A PEVNOST II Navazující magisterské studium, 1. ročník Alois Materna (přednášky) Jiří Brožovský (cvičení) Kancelář: LP C 303/1
Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Cvičení Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí (
 Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
Cvičení 11 1. Na těleso působí napětí v rovině xy a jeho napěťový stav je popsán tenzorem napětí ( σxx τ xy τ xy σ yy ) (a) Najděte vyjádření tenzoru napětí v soustavě souřadnic pootočené v rovině xy o
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
1 Projekce a projektory
 Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Cvičení 3 - zadání a řešení úloh Základy numerické matematiky - NMNM20 Verze z 5. října 208 Projekce a projektory Opakování ortogonální projekce Definice (Ortogonální projekce). Uvažujme V vektorový prostor
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
1. Náhodný vektor (X, Y ) má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.
 má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.") VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
Kritéria porušení laminy
 Kap. 4 Kritéria porušení laminy Inormační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky S ČVU v Praze.. 007-6.. 007 Úvod omové procesy vyvolané v jednosměrovém
Kap. 4 Kritéria porušení laminy Inormační a vzdělávací centrum kompozitních technologií & Ústav mechaniky, biomechaniky a mechatroniky S ČVU v Praze.. 007-6.. 007 Úvod omové procesy vyvolané v jednosměrovém
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
Co jsme udělali: Au = f, u D(A)
") Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Dnešní látka: Literatura: Kapitoly 3 a 4 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Numerické modelování v aplikované geologii
 Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
Numerické modelování v aplikované geologii David Mašín Ústav hydrogeologie, inženýrské geologie a užité geofyziky Přírodovědecká fakulta Karlova Univerzita v Praze Přednášky pro obor Geotechnologie David
stránkách přednášejícího.
 Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Předmět: MA 4 Dnešní látka Iterační metoda Jacobiova iterační metoda Gaussova-Seidelova iterační metoda Superrelaxační metoda (metoda SOR) Metoda sdružených gradientů Četba: Text o lineární algebře v Příručce
Definice 1.1. Nechť je M množina. Funkci ρ : M M R nazveme metrikou, jestliže má následující vlastnosti:
 Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE. Matematika 0A1. Cvičení, zimní semestr. Samostatné výstupy. Jan Šafařík
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Příklady z teoretické mechaniky pro domácí počítání
 Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
Příklady z teoretické mechaniky pro domácí počítání Doporučujeme spočítat příklady za nejméně 30 bodů. http://www.physics.muni.cz/~tomtyc/mech-prik.ps http://www.physics.muni.cz/~tomtyc/mech-prik.pdf 1.
9. přednáška 26. listopadu f(a)h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1
h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1") 9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
ČVUT UPM 6/2013. Eliška Bartůňková
 ČUT UPM 6/2013 Eliška Bartůňková Úvod 1. Motivace PMPD 1.1 Jednoosá napjatost Obsah 1.2 Zobecnění jednoosé napjatosti pro ohýbaný prut 2. Důkaz základní věty mezní analýzy pro diskrétní modely 3. Formulace
ČUT UPM 6/2013 Eliška Bartůňková Úvod 1. Motivace PMPD 1.1 Jednoosá napjatost Obsah 1.2 Zobecnění jednoosé napjatosti pro ohýbaný prut 2. Důkaz základní věty mezní analýzy pro diskrétní modely 3. Formulace
12. Prostý krut Definice
 p12 1 12. Prostý krut 12.1. Definice Prostý krut je označení pro namáhání přímého prizmatického prutu, jestliže jsou splněny prutové předpoklady, příčné průřezy se nedeformují, pouze se vzájemně natáčejí
p12 1 12. Prostý krut 12.1. Definice Prostý krut je označení pro namáhání přímého prizmatického prutu, jestliže jsou splněny prutové předpoklady, příčné průřezy se nedeformují, pouze se vzájemně natáčejí
Interpolace, ortogonální polynomy, Gaussova kvadratura
 Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení.
 Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Přijímací zkouška na navazující magisterské studium 2017 Studijní program: Fyzika Studijní obory: FFUM
 Přijímací zkouška na navazující magisterské studium 207 Studijní program: Fyzika Studijní obory: FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Nechť (a) Spočtěte lim n x n. (b)
Přijímací zkouška na navazující magisterské studium 207 Studijní program: Fyzika Studijní obory: FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Nechť (a) Spočtěte lim n x n. (b)
Martin NESLÁDEK. 14. listopadu 2017
 Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Martin NESLÁDEK Faculty of mechanical engineering, CTU in Prague 14. listopadu 2017 1 / 22 Poznámky k úlohám řešeným MKP Na přesnost simulace pomocí MKP a prostorové rozlišení výsledků má vliv především:
Rovinná úloha v MKP. (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w
: rovinná napjatost a r. deformace (stěny,... ): u, v. prostorové úlohy: u, v, w") Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
Rovinná úloha v MKP Hledané deformační veličiny viz klasická teorie pružnosti (mohou být i jejich derivace!): rovinná napjatost a r. deformace (stěny,... ): u, v desky: w, ϕ x, ϕ y prostorové úlohy: u,
3.2 Základy pevnosti materiálu. Ing. Pavel Bělov
 3.2 Základy pevnosti materiálu Ing. Pavel Bělov 23.5.2018 Normálové napětí představuje vazbu, která brání částicím tělesa k sobě přiblížit nebo se od sebe oddálit je kolmé na rovinu řezu v případě že je
3.2 Základy pevnosti materiálu Ing. Pavel Bělov 23.5.2018 Normálové napětí představuje vazbu, která brání částicím tělesa k sobě přiblížit nebo se od sebe oddálit je kolmé na rovinu řezu v případě že je
KMS cvičení 6. Ondřej Marek
 KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
KMS cvičení 6 Ondřej Marek NETLUMENÝ ODDAJNÝ SYSTÉM S DOF analytické řešení k k Systém se stupni volnosti popisují pohybové rovnice: x m m x m x + k + k x k x = m x k x + k x = k x m x k x x m k x x m
4. Aplikace matematiky v ekonomii
 4. Aplikace matematiky v ekonomii 1 Lineární algebra Soustavy 1) Na základě statistických údajů se zjistilo, že závislost množství statku z poptávaného v průběhu jednoho týdne lze popsat vztahem q d =
4. Aplikace matematiky v ekonomii 1 Lineární algebra Soustavy 1) Na základě statistických údajů se zjistilo, že závislost množství statku z poptávaného v průběhu jednoho týdne lze popsat vztahem q d =
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
2. Určte hromadné body, limitu superior a limitu inferior posloupností: 2, b n = n. n n n.
 Písemka matematika 3 s řešením 1. Vypočtěte lim n( 1 + n 2 n), n lim n (( 1 + 1 n e ) n ) n. 1/2, 1/ e 2. Určte hromadné body, limitu superior a limitu inferior posloupností: a n = sin nπ ( 2, b n = n
Písemka matematika 3 s řešením 1. Vypočtěte lim n( 1 + n 2 n), n lim n (( 1 + 1 n e ) n ) n. 1/2, 1/ e 2. Určte hromadné body, limitu superior a limitu inferior posloupností: a n = sin nπ ( 2, b n = n
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Optimalizace vláknového kompozitu
 Optimalizace vláknového kompozitu Bc. Jan Toman Vedoucí práce: doc. Ing. Tomáš Mareš, Ph.D. Abstrakt Optimalizace trubkového profilu z vláknového kompozitu při využití Timošenkovy hypotézy. Hledání optimálního
Optimalizace vláknového kompozitu Bc. Jan Toman Vedoucí práce: doc. Ing. Tomáš Mareš, Ph.D. Abstrakt Optimalizace trubkového profilu z vláknového kompozitu při využití Timošenkovy hypotézy. Hledání optimálního
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Transformujte diferenciální výraz x f x + y f do polárních souřadnic r a ϕ, které jsou definovány vztahy x = r cos ϕ a y = r sin ϕ.
 Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Derivace funkcí více proměnných
 Derivace funkcí více proměnných Pro studenty FP TUL Martina Šimůnková 16. května 019 1. Derivace podle vektoru jako funkce vektoru. Pro pevně zvolenou funkci f : R d R n a bod a R d budeme zkoumat zobrazení,
Derivace funkcí více proměnných Pro studenty FP TUL Martina Šimůnková 16. května 019 1. Derivace podle vektoru jako funkce vektoru. Pro pevně zvolenou funkci f : R d R n a bod a R d budeme zkoumat zobrazení,
Pružnost a plasticita II CD03
 Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Pružnost a plasticita II CD3 uděk Brdečko VUT v Brně, Fakulta stavební, Ústav stavební mechanik tel: 5447368 email: brdecko.l @ fce.vutbr.cz http://www.fce.vutbr.cz/stm/brdecko.l/html/distcz.htm Obsah
Cvičení 7 (Matematická teorie pružnosti)
") VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
VŠB Technická univerzita Ostrava Fakulta strojní Katedra pružnosti a pevnosti (339) Pružnost a pevnost v energetice (Návo do cvičení) Cvičení 7 (Matematická teorie pružnosti) Autor: Jaroslav Rojíček Verze:
Lineární algebra : Skalární součin a ortogonalita
 Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Lineární algebra : Skalární součin a ortogonalita (15. přednáška) František Štampach, Karel Klouda frantisek.stampach@fit.cvut.cz, karel.klouda@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
DISPERZNÍ KŘIVKY V DESCE S KUBICKOU ANIZOTROPIÍ
 DISPERZNÍ KŘIVKY V DESCE S KUBICKOU ANIZOTROPIÍ P. Hora, O. Červená Ústav termomechaniky AV ČR Příspěvek vznikl na základě podpory grantu cíleného vývoje a výzkumu AV ČR č. IBS276356 Ultrazvukové metody
DISPERZNÍ KŘIVKY V DESCE S KUBICKOU ANIZOTROPIÍ P. Hora, O. Červená Ústav termomechaniky AV ČR Příspěvek vznikl na základě podpory grantu cíleného vývoje a výzkumu AV ČR č. IBS276356 Ultrazvukové metody
Nelineární úlohy při výpočtu konstrukcí s využitím MKP
 Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
Nelineární úlohy při výpočtu konstrukcí s využitím MKP Obsah přednášky Lineární a nelineární úlohy Typy nelinearit (geometrická, materiálová, kontakt,..) Příklady nelineárních problémů Teorie kontaktu,
19 Eukleidovský bodový prostor
 19 Eukleidovský bodový prostor Eukleidovským bodovým prostorem rozumíme afinní bodový prostor, na jehož zaměření je definován skalární součin. Víme, že pomocí skalárního součinu jsou definovány pojmy norma
19 Eukleidovský bodový prostor Eukleidovským bodovým prostorem rozumíme afinní bodový prostor, na jehož zaměření je definován skalární součin. Víme, že pomocí skalárního součinu jsou definovány pojmy norma
Úlohy nejmenších čtverců
 Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
písemky (3 příklady) Výsledná známka je stanovena zkoušejícím na základě celkového počtu bodů ze semestru, ze vstupního testu a z písemky.
 Výsledná známka je stanovena zkoušejícím na základě celkového počtu bodů ze semestru, ze vstupního testu a z písemky.") POŽADAVKY KE ZKOUŠCE Z PP I Zkouška úrovně Alfa (pro zájemce o magisterské studium) Zkouška sestává ze vstupního testu (10 otázek, výběr správné odpovědi ze čtyř možností, rozsah dle sloupečku Požadavky)
POŽADAVKY KE ZKOUŠCE Z PP I Zkouška úrovně Alfa (pro zájemce o magisterské studium) Zkouška sestává ze vstupního testu (10 otázek, výběr správné odpovědi ze čtyř možností, rozsah dle sloupečku Požadavky)
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA. Telefon: WWW:
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA Bakalářské studium, 4. ročník Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STAVEBNÍ NELINEÁRNÍ MECHANIKA Bakalářské studium, 4. ročník Jiří Brožovský Kancelář: LP H 406/3 Telefon: 597 321 321 E-mail: jiri.brozovsky@vsb.cz
Požadavky ke zkoušce
 Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
Požadavky ke zkoušce Zkouška z předmětu MATEMATIKA 2 má dvě části Písemná část: Písemná část se ještě dále rozděluje na praktickou část písemku a teoretickou část test. Písemka trvá 90 minut a je v ní
8. Základy lomové mechaniky. Únava a lomová mechanika Pavel Hutař, Luboš Náhlík
 Únava a lomová mechanika Koncentrace napětí nesingulární koncentrátor napětí singulární koncentrátor napětí 1 σ = σ + a r 2 σ max = σ 1 + 2( / ) r 0 ; σ max Nekonečný pás s eliptickým otvorem [Pook 2000]
Únava a lomová mechanika Koncentrace napětí nesingulární koncentrátor napětí singulární koncentrátor napětí 1 σ = σ + a r 2 σ max = σ 1 + 2( / ) r 0 ; σ max Nekonečný pás s eliptickým otvorem [Pook 2000]
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině.
 a silové působení v tekutině.") Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Zdrojem většiny příkladů je sbírka úloh 1. cvičení ( ) 2. cvičení ( )
 2. cvičení ( )") Příklady řešené na cvičení LA II - LS 1/13 Zdrojem většiny příkladů je sbírka úloh http://kam.mff.cuni.cz/~sbirka/ 1. cvičení (..13) 1. Rozhodněte, které z následujících operací jsou skalárním součinem
Příklady řešené na cvičení LA II - LS 1/13 Zdrojem většiny příkladů je sbírka úloh http://kam.mff.cuni.cz/~sbirka/ 1. cvičení (..13) 1. Rozhodněte, které z následujících operací jsou skalárním součinem
ANALYTICKÁ GEOMETRIE V ROVINĚ
 ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
PATOBIOMECHANIKA SRDEČNĚCÉVNÍHO SYSTÉMU
 PATOBIOMECHANIKA SRDEČNĚCÉVNÍHO SYSTÉMU LUKÁŠ HORNÝ Stejnojmenný studijní text k předmětu Fakulty strojní ČVUT v Praze. Kapitola I Tenzor napětí v různých popisech verze 1 V Praze 2013 Tento studijní text
PATOBIOMECHANIKA SRDEČNĚCÉVNÍHO SYSTÉMU LUKÁŠ HORNÝ Stejnojmenný studijní text k předmětu Fakulty strojní ČVUT v Praze. Kapitola I Tenzor napětí v různých popisech verze 1 V Praze 2013 Tento studijní text
Matematická analýza ve Vesmíru. Jiří Bouchala
 Matematická analýza ve Vesmíru Jiří Bouchala Katedra aplikované matematiky jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala - p. 1/19 typu: m x (sin x, cos x) R(x, ax +...)dx. Matematická analýza ve Vesmíru.
Matematická analýza ve Vesmíru Jiří Bouchala Katedra aplikované matematiky jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala - p. 1/19 typu: m x (sin x, cos x) R(x, ax +...)dx. Matematická analýza ve Vesmíru.
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Regresní analýza 1. Regresní analýza
 Regresní analýza 1 1 Regresní funkce Regresní analýza Důležitou statistickou úlohou je hledání a zkoumání závislostí proměnných, jejichž hodnoty získáme při realizaci experimentů Vzhledem k jejich náhodnému
Regresní analýza 1 1 Regresní funkce Regresní analýza Důležitou statistickou úlohou je hledání a zkoumání závislostí proměnných, jejichž hodnoty získáme při realizaci experimentů Vzhledem k jejich náhodnému
ÚVOD DO MODELOVÁNÍ V MECHANICE
 ÚVO O MOELOVÁNÍ V MECHNICE MECHNIK KOMPOZITNÍCH MTERIÁLŮ 2 Přednáška č. 7 Robert Zemčík 1 Zebry normální Zebry zdeformované 2 Zebry normální Zebry zdeformované 3 Zebry normální 4 Zebry zdeformované protažené?
ÚVO O MOELOVÁNÍ V MECHNICE MECHNIK KOMPOZITNÍCH MTERIÁLŮ 2 Přednáška č. 7 Robert Zemčík 1 Zebry normální Zebry zdeformované 2 Zebry normální Zebry zdeformované 3 Zebry normální 4 Zebry zdeformované protažené?
TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE
 1 TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE Michal Jandera Obsah přednášek 1. Stabilita stěn, nosníky třídy 4.. Tenkostěnné za studena tvarované profily: Výroba, chování průřezů, chování prutů. 3. Tenkostěnné
1 TENKOSTĚNNÉ A SPŘAŽENÉ KONSTRUKCE Michal Jandera Obsah přednášek 1. Stabilita stěn, nosníky třídy 4.. Tenkostěnné za studena tvarované profily: Výroba, chování průřezů, chování prutů. 3. Tenkostěnné
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Obr. 0.1: Nosník se spojitým zatížením.
 Každý test obsahuje jeden příklad podobný níže uvedeným tpovým příkladům a několik otázek vbraných z níže uvedených testových otázek. Za příklad je možno získat maimálně bodů, celkový počet bodů z testu
Každý test obsahuje jeden příklad podobný níže uvedeným tpovým příkladům a několik otázek vbraných z níže uvedených testových otázek. Za příklad je možno získat maimálně bodů, celkový počet bodů z testu