Teorie řízení. Analýza vlastností spojitých lineárních systémů
|
|
|
- Božena Urbanová
- před 9 lety
- Počet zobrazení:
Transkript

1 Teorie řízení VOŠ SPŠ KunáHor Anlýz vlsnosí sojiých lineárních sysémů Sickévlsnosi oisují chování sysému v usáleném svu nevysihují řechodový děj nejčsější meodou oisu je sická chrkerisik Příkld: chrkerisik eloměru SiC


2 Dynmickévlsnosi sojiých lin. sysémů chrkerizují sysém ři změně svu vysihují řechodovéděje v sysému i usálený sv Meody vnějšího oisu dynmických vlsnosí vnější ois -relce mezi vsuem výsuem sysému diferenciální rovnice obrzový oeráorový řenos frekvenční řenos frekvenční chrkerisik řechodová fce řechodová chrkerisik imulsní fce imulsní chrkerisik 3 Memický ois diferenciální rovnicí diferenciální rovnice je nejobecnější meodou oisu ro lineární sysém lí: sysém je fyzicky relizovelný z odmínky: m n ideální deriváor nelze relizov Klidový usálený sv okud exisuje ro lí je usálená hodno 4



3 Diferenciální rovnice inegrčního článku Příkld : Sesve diferenciální rovnici inegrčního RC článku u u i du R i C C R i d C ir du u u du C RC u u d R d výsledná rovnice inegrčního článku : dy T y d u 5 Diferenciální rovnice derivčního článku Příkld : u u uc ur id u i C R du du u u d u RC u RC RC d d výsledná rovnice derivčního článku : y du T y T d d 6 3




4 Mechnický sysém Příkld 3 : Sesve diferenciální rovnici mechnického sysému vořeného hmoným bodem, ružinou lumičem. Pro jednolivésíly lí: direkivní síl ružiny k uhos ružiny F D k y dy lumicí síl F b b d b součiniel viskózního lumení d y kcelerční síl Fm m m d Podle D Almberov rinciu lí: F Fm Fb FD d y dy m b k y F d d 7 Význm konsn z říkldu 3 Aby konsny diferenciální rovnice měly vyovídcí hodnou o vlsnosech sysému, je řeb rovnici urvi do vru: T vlsní eriod kmiů ξ koeficienu oměrného lumení Úrvou rovnice orovnáním s obecným vzhem sysému. řádu dosneme m d y b dy y F k d k d k Odezv n skok vsuní veličiny ξ > eriodický sysém ξ mezní eriodický < ξ < kmivý 8 4


5 Elekromechnický sysém Příkld 4 : Sesve diferenciální rovnici ss moorku s buzením ermnenním mgneem. Elekrické schém ss. mooru u R i u e ue ke ω R i k u e ω Mechnická čás mooru dω k m i J M z d J R dω ke ω u km d 9 Obrzový řenos Definice Obrzový řenos je definován jko odíl Llceov obrzu výsuního signálu y k L-obrzu vsuního signálu u ři nulových očáečních odmínkách. L-obrzy získáme z originálů Llceovournsformcí. Y s F s U s Ys Us s nebo L-obrz výsuního signálu L-obrz vsuního signálu Llceůvoeráor 5


6 Důvody oužií L-rnsformce L-rnsformce řevádí originální funkci z čsové oblsi do oblsi oeráorové funkce komlexníroměnné řevádí diferenciální rovnice n lgebrické schém řešení roblému osného diferenciální rovnicí je n obr. Definice L-rnsformce Přímá rnsformce x Xs Zěná rnsformce Xs x x Xs s c originální čsová fce L-obrz originální fce Llceůvoeráor konsn 6

7 Lineri Zákldní vlsnosi L-rnsformce kde,, jsou libovolné konsny, mohou bý i komlexní Derivce v čsovéoblsi Pro nulové očáeční odmínky: ro. derivci lí dx L s X x d Inegrál v čsovéoblsi 3 Výh ze slovníku L-rnsformcí Originální funkce Obrz /s δ /s e ±. s m 4 7

8 Obrzový řenos lineárního sysému obrzový řenos získáme L-rnsformcí diferenciální rovnice m m Ys bm s bm s... b Fs Us n n n s n s... kořeny olynomu v čieli se nzývjí nuly řenosu kořeny olynomu ve jmenoveli se nzývjí óly řenosu n n chrkerisická rovnice: n s n s... ob olynomy lze ns ve vru součinu kořenových činielů: bm s-n s-n s-nn Fs n s- s-... s-n i jsou-li óly nuly řenosu reálné, k řenos sysému lze vyjádři omocí čsových konsn: b st st... stm T Fs i -/n i sτ sτ... sτn τ i -/ i... n i nuly řenosu óly řenosu 5 Příkld 5 : Příkldy - obrzový řenos Vyočěe obrzový řenos inegrčního článku osného diferenciální dy rovnicí: T y u d Provedeme L-rnsformci: T s Y s Y s U s Y s T s U s Y s F s U s T s Příkld 6 : Vyočěe obrzový řenos mechnického sysému z říkldu 3. Diferenciální rovnice: m d y b dy y u k d k d k L-rnsformce: m b s Ys s Ys Ys Us k k k Ys Fs k Us m b s s k k 6 8

9 Zěná L-rnsformce je řechodem z oblsi oeráorové do čsové meody Z - -rnsformce výoče odle vzorce složié rozkld n jednoduché výrzy oužií slovníku L-obrzů Příkld 7 Vyočěe odezvu výsuu inegrčního článku n jednokový skok vsuního signálu. Čsová konsn T,s. Řešení: dy Diferenciální rovnice:, y u d Y Obrzový řenos: s F s U s, s Obrz výsuu: Y s Fs Us U s, s s s Y s s, s s s 7 Příkld 7 Provedeme rozkld n rciální zlomky: óly řenosu:, - A B Y s s s s s A s B s s s s s A B B A B o roznásobení: A s B s B s s s s Y s s s L e s s y e 8 9

10 Grf funkce,,,5,,,3,4,5 y,,8,39,63,86,95,98,99,,8,6,4,,,,3,4,5,6 9 Příkld 8 Příkld 8 Vyočěe odezvu n jednokový skok sysému osného diferenciální rovnicí: y 3y y x Řešení: Fs s 3s óly: - - Fs s s chrkerisická rovnice: Ys Fs Us s 3s s s s rozkld n rciální zlomky: A B C Y s s s s 3 s 3s s s s s L e s s s e Výoče omocí Excel

11 Frekvenční řenos Definice Frekvenční řenos F jω lze formálně urči z řenosu sysému v Llceově rnsformci doszením jω. j ω -komlexní oeráor -kruhová frekvence Sysém sbilní definice Y jω F jω U jω Y jω U jω -Fourierůvobrz výsuu -Fourierůvobrz vsuu Frekvenční chrkerisik Definice Frekvenční chrkerisik je grfickým vyjádřením frekvenčního řenosu ro měnící se ω, jωϕ ω F jω F jω e Re Zůsoby zobrzení [ F jω ] j Im [ F jω ] V komlexní rovině křivk s rmerem ω V logrimických souřdnicích dvě chrkerisiky vodorovnáos hodno log ω svisláos. mliud řenosu v db logrimická mliudová chrkerisik. fáze řenosu ve suních fázová frekvenční chrkerisik
![Definice Frekvenční chrkerisik je grfickým vyjádřením frekvenčního řenosu ro měnící se ω, jωϕ ω F jω F jω e Re Zůsoby zobrzení [ F jω ] j Im [ F jω ] V](/docs-images/41/85006/images/page_11.jpg "komlexní rovině křivk s rmerem ω V logrimických souřdnicích dvě chrkerisiky vodorovnáos hodno log ω svisláos.")
![Frekvenční chrkerisik v komlexní rovině Záis [ F jω ] j Im [ F j ] F jω Re ω Zobrzení Sočeme řenos ro několik hodno kruhové frekvence Počáeční bod: ω limf jω ω Koncový bod: ω limf jω ω Dlší hodnoy ω](/docs-images/17/85006/images/12-0.png "jejich oče volíme Zkreslíme do komlexní roviny n osy vynášíme reálnou imginární čás řenosu 3 Příkld 9 Příkld 9 Nkreslee frekvenční chrkerisiku v komlexní rovině ro sický sysém rvního řádu s řenosem:")
12 Frekvenční chrkerisik v komlexní rovině Záis [ F jω ] j Im [ F j ] F jω Re ω Zobrzení Sočeme řenos ro několik hodno kruhové frekvence Počáeční bod: ω limf jω ω Koncový bod: ω limf jω ω Dlší hodnoy ω jejich oče volíme Zkreslíme do komlexní roviny n osy vynášíme reálnou imginární čás řenosu 3 Příkld 9 Příkld 9 Nkreslee frekvenční chrkerisiku v komlexní rovině ro sický sysém rvního řádu s řenosem: Řešení: F jω jωt ro ω je limf jω K ω ro ω je lim F jω ω Výrz jω T je v komlexní rovině olořímk, inverzíolořímky je ůlkružnice s růměrem určeným konsnou K. 4



13 Frekvenční chrkerisik v logrimických souřdnicích Záis F jω F jω e jωϕ ω Zobrzení vlsnosi sysému určeny dvěm funkcemi dvě chrkerisiky závislos bsoluní hodnoy řenosu n frekvenci, růběh fáze oužijeme logrimické měříko logf j ω logf jω jϕ ω vyjádříme mliudu v decibelech db F jω logf jω db logrimické měříko Výhodné, když řenos sysému F jω F jω F jω KF j n ω Použiím log. měřík vě o logrimech můžeme sá: F jω F j F j F db ω db ω K db n jω db ϕ ω ϕ ω ϕ ω K ϕn ω 5 Frekvenční chrkerisik v logrimických souřdnicích zákldní chrkerisiky I Amliudová fázováchrkerisik kresleno omocí symo Mximální chyb je v oblsi ω bod zlomu činí3 db Přenos sysému Amliudová fázová chrkerisik F jω jω F jω jωt 6 3



14 Frekvenční chrkerisik v logrimických souřdnicích zákldní chrkerisiky II Amliudová fázováchrkerisik kresleno omocí symo Mximální chyb je v oblsi ω Přenos sysému Amliudová fázová chrkerisik F jω jtξω T ω bod zlomu činí3 db F jω e jωt 7 Frekvenční chrkerisik v logrimických souřdnicích využií zákldních chrkerisik Vyjádříme funkci F jω jko odíl součinu kořenových činielůčiele jmenovele m j k F jω K n j k ω ω k ω ω bk sesrojíme mliudovou fázovou chrkerisiku ro jednolivé kořenové činiele využií zákldních chrkerisik výsledná chrkerisik souče mliudových fázových chrkerisik jednolivých kořenových činielů 8 4








15 Příkld Příkld Nkreslee frekvenční chrkerisiku ro sysém s řenosem: Řešení: F jω K jωt jω jωt jωt 3 9 Příkld -Pokrčování Řešení: 3 5

16 Frekvenční chrkerisik - měření Zůsob měření frekvenčních chrkerisik u elekrických sysémů Amliudová frekvenční chrkerisik -n vsu řiojíme sinusový signál měříme zesílení Fázová frekvenční chrkerisik -využií generáoru dvouknálového osciloskou G u u F jω Oscilosko Použií Lissjousových obrzů: -vsu X osciloskou výsu generáoru, vsu Y osciloskou výsu sysému -n osciloskou elis -měníme frekvenci generáoru odečíáme fázový osun 3 Imulsní chrkerisik Definice Imulsní chrkerisik je grfické vyjádření čsové odezvy sysému n Dircůvimulz ři nulových očáečních odmínkách. Dircův imulz -definice δ δ δ d, ro Llceůvobrz Dircov imulzu je roven jedné: { } L δ 3 6

17 Vzh mezi imulzní řechodovou chrkerisikou Přechodová chrkerisik H F Imulzní chrkerisik G F H G V čsové oblsi Přechodová chrkerisik h Imulzní chrkerisik g h L g L { H } { G } lí vzhy: h g g dh d 33 Příkld Příkld Pomocí vzhu imulzní řechodové chrkerisiky určee nlyické vyjádření řechodové chrkerisiky ro sysém s řenosem: Řešení: G F F, L { G } L e h τ e dτ e τ [ e ] e e τ dτ e τ 34 7

18 Vniřní ois sysému Vniřní ois sysému cháeme jko relci mezi vsuní veličinou u, svem sysému x výsuní veličinou y. Hovoříme k o svových rovnicích sysému. x& f x, u, y g x, u, kde: x je n-rozměrný svový vekor, y je výsu sysému f jsou n-rozměrovénelineárnívekorové funkce, g je sklární funkce. 35 Vniřní ois sysému Je-li dynmický sysém lineární -invrinní k lí: x & A x B u y C x D u kde: A je mice sysému rozměru n x n, B je mice řízení rozměru n x r, C, D jsou výsuní mice rozměrů m x n m x r. Je-li lineární sysém scionární, oom jsou mice A, B, C D konsnní, j, nezávislé n čse. 36 8

19 Vniřní ois sysému říkld Úrvou výše uvedených rovnic dosneme římo svové rovnice mooru: di R k x& i ω d L L Svové veličiny jsou: i u L d k x& ω i m z d J J dϕ x& 3 ω d x x ω x ϕ Řídící veličiny jsou: u u u m Výsuní veličin je: y x 3 ϕ z 3 39 Vniřní ois sysému říkld Z uvedených svových rovnic můžeme okmžiě vyjádři mice A, B, C D i ω ϕ R L k A J k L L B J C [ ] D [ ] Chceme nočení hřídele φ jko výsu. 4

20 Regulovnésousvy Regulovná sousv je zřízení, kde se rovádí regulce nsvení kční veličiny jko vsuní veličiny se udržuje okmžiá hodno regulovné veličiny jko výsuní veličiny regulovné sousvy n oždovné hodnoě. 4 Regulovnésousvy Příkldy regulovných sousv: -nádrž svodou, kde se udržuje říokem výšk hldiny - vzdušník, kde se zínáním vyínáním komresoru udržuje lk, ořebný ro ovládání hšení oblouku lkovzdušných vyínčů Pro návrh regulčního obvodu musíme zná dynmické vlsnosi, vyjádřené chováním výsuu ři změnách n vsuu. Nejnázorněji se dynmické vlsnosi vyjdřují řechodovou chrkerisikou. Dlší důležiou vlsnosí regulovných sousv je čsové zoždění signálu ři růchodu sousvou. Čsové zoždění vzniká, lní-li se nějká kci objemová, eelná, elekrická řes hydrulický, eelný nebo elekrický odor. Příkldy kci: - k nlnění nádrže n určiou výšku hldiny je řeb určiého čsu; - n ohřáí rosoru n oždovnou elou je řeb určiého čsu; 4


21 Regulovnésousvy Regulovné sousvy se rozdělují odle chování výsuu ři skokové změně n vsuu n: Sické Asické 43 Regulovnésousvy -Sické Jsou chrkerisické ím, že o skokové změně n vsuu se výsu usálí n nové hodnoě omocí reguláoru. Sické regulovné sousvy si můžeme rozděli odle vlivu kci odle zoždění ři růchodu signálu sousvou n: - bezkciní nulého řádu - jednokciní rvního řádu - dvoukciní druhého řádu - vícekciní vyšších řádu - s dorvním zožděním 44
22 Regulovnésousvy Sické Bezkciní bez zoždění Vyskyují se zřídk. Jko říkld uveďme odorovou záěž sbilizáoru j. reguláoru něí. K zvěšení odolnosi roi rozkmiání se u ěcho sousv uměle zvádí servčnos ve formě elekrolyického kondenzáoru. Jednokciní zoždění rvého řádu Regulují se velmi dobře n konsnní hodnou regulovné veličiny, nejsou náchylné ke kmiání jsou málo cilivé ke krákodobým oruchám. Mjí nejvěší schonos uoregulce ze všech regulovných sousv. Tyo jednokciní sousvy jsou yické ro regulci eloy menších ecí, ro regulci oáček moorů lku lynů. 45 Regulovnésousvy Sické Příkld jednokciní sousvy Nádrž vody svolným výokem N nádrži svolným výokem je možno definov rinci smoregulce. Srůsem výšky hldiny se zvyšuje hydrosický lk ím i výoková rychlos zvyšuje se odékjící množsví. Až se říok výok vyrovnjí, hldin se usálí. 46 3

23 Regulovnésousvy Sické Příkld jednokciní sousvy Žehličk Akční veličin oný říkon; Regulovná veličin elo ěles; Ulňuje se ouze jedn kci žehlícího ěles. 47 Regulovnésousvy Sické Dvoukciní zoždění druhého řádu vícekciní Tyo sousvy lumíme, bychom olčili jejich kmiání. Znčné fázové osuny zůsobené sousvmi vyšších řádů velmi znesndňují regulci, neboť nedovolují zvedení silné záorné vzby, roože se ři celkovém fázovém osunu 8 mění v kldnou zěnou vzbu. Jsou-li slněny odmínky vzniku oscilcí, regulční sysém se rozkmiá. Příkldem sojení kci různého chrkeru je ěžké kolo hmonos, jehož oáčky jsou regulovány servomoorem řes dlouhý, relivně slbý hřídel j. oddjnos. U velkých ecí s mohunou vyzdívkou se ulňuje eelný odor vyzdívky rozložený v celém objemu s eelnou kciou vyzdí odobně jko elekrické servčné členy RC zojené ve velkém oču z sebou. Tková ec má chrker kmivého členu vyššího řádu. Čím je řád sousvy vyšší, ím je regulce obížnější. 48 4
24 S dorvním zožděním Regulovnésousvy Sické U servčných členů rvního řádu s čsovou konsnou T můžeme oměr τ/t dosdi do uvedených vzhů míso Tu/Tn, bychom si učinili o obížnosi regulce řibližnou ředsvu. Dovoluje o odobnos řechodových chrkerisik sousv obou yů. V rxi se snžíme zmenši dorvní zoždění n minimum, okud je o možné, zvěši servčnos sousvy k, by čsová konsn byl mnohem věší než dorvní zoždění. 5 Regulovnésousvy Sické Dynmické vlsnosi Vyjdřují závislos vsuních výsuních veličin vneusáleném svu v okmžiku, kdy se yo veličiny mění. K vyjádření dynmických vlsnosí RS i keréhokoliv členu obvodu se oužívá několik zůsobů: diferenciální rovnice memické řešení b řechodová chrkerisik zjišťuje se výočem, vrxi se všk dává řednos jejímu měření c frekvenční řenos d frekvenční chrkerisiky v komlexní rovině nebo vlogrimických souřdnicích 5 6

25 7 53 Regulovnésousvy Sické Dynmické vlsnosi Diferenciální rovnice: ideální bez servčnosi: u b y b se servčnosí I. řádu: ' u b y y c se servčnosí II. řádu: ' 4 ' ' 4 ' ' ' / ' ' ' K u y y y T K b T u b y y y u b y y y ξ ξ T... čsová konsn dob kmiu nelumeného obvodu K... zesílení ξ... [ksí] lumení 54 Regulovnésousvy Sické Dynmické vlsnosi Přenos v LT Llceově rnsformci: ideální bez servčnosi : b se servčnosí I. řádu: K b U Y F U b Y / T K U Y F K U Y T K b T U b Y Y U b Y Y
26 8 55 Regulovnésousvy Sické Dynmické vlsnosi Přenos v LT Llceově rnsformci: c se servčnosí II. řádu: T K U Y F K U T Y K U Y Y Y T ξ ξ ξ K b T 4ξ T... čsová konsn K... zesílení ξ... [ksí] lumení 56 Regulovnésousvy Sické Dynmické vlsnosi 3 Přechodová funkce: ideální bez servčnosi: K h K F H b se servčnosí I. řádu: T e K h T K F H c se servčnosí II. řádu: 4 T K F H ξ
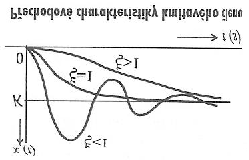
27 Regulovnésousvy Sické Dynmické vlsnosi 4 Přechodová chrkerisik: ideální bez servčnosi: b se servčnosí I. řádu: 57 Regulovnésousvy Sické Dynmické vlsnosi 4 Přechodová chrkerisik: c se servčnosí II. řádu: Poměrné lumení může nbýv ěcho hodno: ξ >...sousv je řelumená nekmiá ξ...sousv je n mezi eriodiciy nekmiá <ξ<...sousv lumeně kmiá ξ...člen nelumeně kmiá. Jde o eoreický sv, neboť lumeníje ve skuečnosi vždy věší než nul 58 9
28 Regulovnésousvy Sické Dynmické vlsnosi 4 Přechodová chrkerisik: d sdorvním zožděním: -u ideální sousvy -u sousvy se servčnosí I. řádu 59 Regulovnésousvy Sické Dynmické vlsnosi 5 Frekvenční řenos: ideální bez servčnosi: F jω K b se servčnosí I. řádu: F jω T K T jω jω T jω T K K T ω j ω T ω c se servčnosí II. řádu: F K jω T jω 4ξ jω d sdorvním zožděním: F j ω T K e j ω jωτ 6 3


29 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: ideální bez servčnosi : -vkomlexní rovině: 6 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: ideální bez servčnosi: -vlogrimických souřdnicích: LAFCH: A[dB] log K LFFCH: Im ω ϕ rc g Re ω 6 3


30 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: b se servčnosí I. řádu: -vkomlexní rovině: 63 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: b se servčnosí I. řádu: -vlogrimických souřdnicích: -LAFCH: A log K log T ω 64 3


31 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: b se servčnosí I. řádu: -vlogrimických souřdnicích: -LFFCH: ϕ rc g ω T 65 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: b se servčnosí II. řádu: -vkomlexní rovině: 66 33

32 Dynmické vlsnosi Regulovnésousvy Sické 6 Frekvenční chrkerisiky: c se servčnosí II. řádu kmivý člen: -vlogrimických souřdnicích: LAFCH: A[ db] log K log T ω log T ω LFFCH: ϕ rc co g ω T rc g ω T 67 Regulovnésousvy Sické LAFCH: LFFCH: 68 34


33 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: d sdorvním zožděním, se servčnosí I. řádu: -vkomlexní rovině: 69 Regulovnésousvy Sické Dynmické vlsnosi 6 Frekvenční chrkerisiky: - LAFCH LFFCH: d sdorvním zožděním, se servčnosí I. řádu: -vlogrimických souřdnicích: Amliudová chrkerisik v logrimických souřdnicích se vlivem dorvního zoždění nezmění. K ůvodní fázi φ všk musíme n kždé frekvenci řičís úhel ωτ, dný dorvním zožděním. 7 35

34 Regulovnésousvy Sické Příkldy sických sousv z rxe: ideální bez servčnosi: b se servčnosí I. řádu: c se servčnosí II. řádu: 7 Regulovnésousvy Asické Jsou chrkerisické ím, že o skokové změně n vsuu se sousv n výsuu neusálí n novou hodnou bez omoci reguláoru. Asické sousvy si můžeme obdobně jko sické rozděli odle zoždění signálu ři růchodu sousvou odle oču kci s ím, že neexisuje bezkciní sická sousv. - bezkciní nulého řádu -NEEXISTUJE - jednokciní rvního řádu - dvoukciní druhého řádu - vícekciní vyšších řádů - s dorvním zožděním 7 36


35 Regulovnésousvy Asické Příkld jednokciní sousvy Nádrž vody s čerdlemn odoku Po znuí říoku výšk hldiny rose nezávisle n lku řed čerdlem Č. Rozdíl od S 73 Regulovnésousvy Asické Dynmické vlsnosi Jednokciní rvního řádu: -memickýois: -řenos:, y b u, y ku k... zesílení sousvy -řechodová chrkerisik: 74 37



36 38 75 Regulovnésousvy Asické Dvoukciní druhého řádu:,,, u b y y T k b b F I Dynmické vlsnosi -memickýois: -řenos: -řechodová chrkerisik:
1. Vysvětlete pojmy systém a orientované informační vazby (uveďte příklady a protipříklady). 2. Uveďte formy vnějšího a vnitřního popisu systémů.
. 2. Uveďte formy vnějšího a vnitřního popisu systémů.") Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
Soubor říkladů k individuálnímu rocvičení roblemaiky robírané v ředměech KKY/TŘ a KKY/AŘ Uozornění: Následující říklady však neokrývají veškerou roblemaiku robíranou v uvedených ředměech. Doazy, náměy,
1 - Úvod. Michael Šebek Automatické řízení
 1 - Úvod Michael Šebek Auomaické řízení 2018 9-6-18 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo) Sysém: určiá čás objeku, kerou se zabýváme, řídíme, Moor, sojka,
1 - Úvod Michael Šebek Auomaické řízení 2018 9-6-18 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo) Sysém: určiá čás objeku, kerou se zabýváme, řídíme, Moor, sojka,
1 - Úvod. Michael Šebek Automatické řízení Evropský sociální fond Praha & EU: Investujeme do vaší budoucnosti
 1 - Úvod Michael Šebek Auomaické řízení 2016 Evroský sociální fond Praha & EU: Invesujeme do vaší budoucnosi 23-2-16 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo)
1 - Úvod Michael Šebek Auomaické řízení 2016 Evroský sociální fond Praha & EU: Invesujeme do vaší budoucnosi 23-2-16 Základní názvosloví Auomaické řízení - Kyberneika a roboika Objek: konkréní auo (amo)
Nakloněná rovina II
 1215 Nkloněná rovin II Předokldy: 1214 Pomůcky: siloměr 2,5 N, sd n měření řecí síly Pedoická oznámk: V éo následující hodině se nerobírá žádná nová lák Přeso jde o oměrně důležié hodiny, roože žáci se
1215 Nkloněná rovin II Předokldy: 1214 Pomůcky: siloměr 2,5 N, sd n měření řecí síly Pedoická oznámk: V éo následující hodině se nerobírá žádná nová lák Přeso jde o oměrně důležié hodiny, roože žáci se
Řešení přechodných jevů pomocí Laplaceovy transformace. přímá transformace f(t) F(p) obrazy F(p)
 F(p) obrazy F(p)") Řšní řchodných jvů omocí lcovy rnsformc Anlýzu řchodných jvů j. vyšřní dynmického chování lkrického ovodu osného sousvou difrnciálních rs. inrodifrnciálních rovnic lz s výhodou rovés omocí oráorového oču,
Řšní řchodných jvů omocí lcovy rnsformc Anlýzu řchodných jvů j. vyšřní dynmického chování lkrického ovodu osného sousvou difrnciálních rs. inrodifrnciálních rovnic lz s výhodou rovés omocí oráorového oču,
zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, napájen do kotvy, indukčnost zanedbáme.
 Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
Teorie řízení 004 str. / 30 PŘÍKLAD zadání: Je dán stejnosměrný motor s konstantním magnetickým tokem, naájen do kotvy, indukčnost zanedbáme. E ce ω a) Odvoďte řenosovou funkci F(): F( ) ω( )/ u( ) b)
KEV/RT 2. přednáška. EK
 KEV/T. řednáša Marin Janda maa@ev.zcu.cz EK 05 377 63 4435 Oaování - lineární regulace P roorciální reguláor onsana malá odchyla malý výsu velé vhodné malé Záladní myšlena návrhu reguláoru chceme co nerychleší
KEV/T. řednáša Marin Janda maa@ev.zcu.cz EK 05 377 63 4435 Oaování - lineární regulace P roorciální reguláor onsana malá odchyla malý výsu velé vhodné malé Záladní myšlena návrhu reguláoru chceme co nerychleší
6. Setrvačný kmitový člen 2. řádu
 6. Setrvčný kmitový člen. řádu Nejprve uvedeme dynmické vlstnosti kmitvého členu neboli setrvčného členu. řádu. Předstviteli těchto členů jsou obvody nebo technická zřízení, která obshují dvě energetické
6. Setrvčný kmitový člen. řádu Nejprve uvedeme dynmické vlstnosti kmitvého členu neboli setrvčného členu. řádu. Předstviteli těchto členů jsou obvody nebo technická zřízení, která obshují dvě energetické
1.1.20 Sbírka na procvičení vztahů mezi veličinami popisujícími pohyb
 1.1.20 Sbírk n procvičení vzhů mezi veličinmi popisujícími pohyb Máme ři veličiny popisující pohyb dv vzhy, keré je spojují nvzájem. s v = Rychlos je změn dráhy z změnu čsu (rychlos říká, jk se v čse mění
1.1.20 Sbírk n procvičení vzhů mezi veličinmi popisujícími pohyb Máme ři veličiny popisující pohyb dv vzhy, keré je spojují nvzájem. s v = Rychlos je změn dráhy z změnu čsu (rychlos říká, jk se v čse mění
Účinnost plynových turbín
 Účinnos lynovýh urbín eelná účinnos (zisk využielné ehniké ráe) se snovuje sejně jko u všeh eelnýh oběhů. ermodynmiké změny rovní láky, v -v, -s digrmu, jsou n obr.. ehniké rovedení n obr. Ideální eelná
Účinnos lynovýh urbín eelná účinnos (zisk využielné ehniké ráe) se snovuje sejně jko u všeh eelnýh oběhů. ermodynmiké změny rovní láky, v -v, -s digrmu, jsou n obr.. ehniké rovedení n obr. Ideální eelná
Otázky ke Státním závěrečným zkouškám
 Oázky ke Sáním závěrečným zkouškám jsou rozděleny do ří oblasí a sudenům bude oložena z každé oblasi vždy jedna oázka. Oblasi jsou rozděleny následovně :.Teorie řízení a umělá ineligence Sem aří okruhy
Oázky ke Sáním závěrečným zkouškám jsou rozděleny do ří oblasí a sudenům bude oložena z každé oblasi vždy jedna oázka. Oblasi jsou rozděleny následovně :.Teorie řízení a umělá ineligence Sem aří okruhy
Vztahy mezi veličinami popisujíscími pohyb
 1.1.23 Vzhy mezi veličinmi popisujíscími pohyb Předpokldy: 010122 Pedgogická poznámk: Cílem hodiny je: získání ciu pro diferenciální chování veličin, nácvik dovednosi dodržování prvidel (kreslení derivovných
1.1.23 Vzhy mezi veličinmi popisujíscími pohyb Předpokldy: 010122 Pedgogická poznámk: Cílem hodiny je: získání ciu pro diferenciální chování veličin, nácvik dovednosi dodržování prvidel (kreslení derivovných
Základy hydrodynamiky
 Fkl svební ČVUT v Pre Kedr hdrlik hdroloie Předmě HYA K4 Fv ČVUT Zákld hdrodnmik Doc. In. Aleš Hvlík, Cc., In. Tomáš Picek PhD. K4 Hdrlik POHYB TEKUTINY ois ohb ekin - je řeb ná vlsnosi ve všech bodech
Fkl svební ČVUT v Pre Kedr hdrlik hdroloie Předmě HYA K4 Fv ČVUT Zákld hdrodnmik Doc. In. Aleš Hvlík, Cc., In. Tomáš Picek PhD. K4 Hdrlik POHYB TEKUTINY ois ohb ekin - je řeb ná vlsnosi ve všech bodech
5. Využití elektroanalogie při analýze a modelování dynamických vlastností mechanických soustav
 5. Využií elekroanalogie při analýze a modelování dynamických vlasnosí mechanických sousav Analogie mezi mechanickými, elekrickými či hydraulickými sysémy je známá a lze ji účelně využíva při analýze dynamických
5. Využií elekroanalogie při analýze a modelování dynamických vlasnosí mechanických sousav Analogie mezi mechanickými, elekrickými či hydraulickými sysémy je známá a lze ji účelně využíva při analýze dynamických
Obvykle se používá stejná transformační matice pro napětí a proud.
 Trnsformce do složkových sousv náhrd fázorů fyzikálních veličin složkmi V rojfázové sousvě plí I I I c Ic b bc b bc V rnsformovné sousvě plí o I o I I n In m omn m omn Definičně určíme pro npěí 1 bc u
Trnsformce do složkových sousv náhrd fázorů fyzikálních veličin složkmi V rojfázové sousvě plí I I I c Ic b bc b bc V rnsformovné sousvě plí o I o I I n In m omn m omn Definičně určíme pro npěí 1 bc u
IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA,
 IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA, STABILITA. Jednokový impuls (Diracův impuls, Diracova funkce, funkce dela) někdy éž disribuce dela z maemaického hlediska nejde o pravou funkci (přesný popis eorie
IMPULSNÍ A PŘECHODOVÁ CHARAKTERISTIKA, STABILITA. Jednokový impuls (Diracův impuls, Diracova funkce, funkce dela) někdy éž disribuce dela z maemaického hlediska nejde o pravou funkci (přesný popis eorie
ELEKTRONICKÉ OBVODY I
 NIVEZITA OBANY Fakula vojenských echnologií Kaedra elekroechniky -99 ELEKTONIKÉ OBVODY I čebnice Auoři: rof. Ing. Dalibor Biolek, Sc. rof. Ing. Karel Hájek, Sc. doc. Ing. Anonín Krička, Sc. doc. Ing. Karel
NIVEZITA OBANY Fakula vojenských echnologií Kaedra elekroechniky -99 ELEKTONIKÉ OBVODY I čebnice Auoři: rof. Ing. Dalibor Biolek, Sc. rof. Ing. Karel Hájek, Sc. doc. Ing. Anonín Krička, Sc. doc. Ing. Karel
Katedra obecné elektrotechniky Fakulta elektrotechniky a informatiky, VŠB - TU Ostrava 4. TROJFÁZOVÉ OBVODY
 Kaedra obecné elekroechniky Fakula elekroechniky a inormaiky, VŠB - T Osrava. TOJFÁZOVÉ OBVODY.1 Úvod. Trojázová sousava. Spojení ází do hvězdy. Spojení ází do rojúhelníka.5 Výkon v rojázových souměrných
Kaedra obecné elekroechniky Fakula elekroechniky a inormaiky, VŠB - T Osrava. TOJFÁZOVÉ OBVODY.1 Úvod. Trojázová sousava. Spojení ází do hvězdy. Spojení ází do rojúhelníka.5 Výkon v rojázových souměrných
princip: části: Obr. B.1: Rozdělení částí brzdového zařízení.
 B Brdění siničníc voide Definování ákdníc ojmů oždvků n rdění siničníc voide vycáí meinárodníc ředisů, nř. EHK č. 13 H. Zde jsou definovné oždvky n void edisk rdění. B.1 Zákdní ojmy Brdové říení součási,
B Brdění siničníc voide Definování ákdníc ojmů oždvků n rdění siničníc voide vycáí meinárodníc ředisů, nř. EHK č. 13 H. Zde jsou definovné oždvky n void edisk rdění. B.1 Zákdní ojmy Brdové říení součási,
Laplaceova transformace.
 Lalaceova transformace - studijní text ro cvičení v ředmětu Matematika -. Studijní materiál byl řiraven racovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za odory grantu IG ČVUT č. 300043 a v rámci
Lalaceova transformace - studijní text ro cvičení v ředmětu Matematika -. Studijní materiál byl řiraven racovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za odory grantu IG ČVUT č. 300043 a v rámci
Nelineární systémy Pohyb ve velkých pracovních rozsazích Řízení systémů s nelinearitami, které nelze linearizovat.
 elineární sysémy Sudium nelineárních sysémů eich vlsnosí zvyšue podsně možnosi prcov účinně s prkickými prolémy přispívá k hlušímu pochopení reálného svě kerý e ve své podsě nelineární.jedině pomocí nelineárních
elineární sysémy Sudium nelineárních sysémů eich vlsnosí zvyšue podsně možnosi prcov účinně s prkickými prolémy přispívá k hlušímu pochopení reálného svě kerý e ve své podsě nelineární.jedině pomocí nelineárních
Matematika v automatizaci - pro řešení regulačních obvodů:
 . Komplexní čísla Inegrovaná sřední škola, Kumburská 846, Nová Paka Auomaizace maemaika v auomaizaci Maemaika v auomaizaci - pro řešení regulačních obvodů: Komplexní číslo je bod v rovině komplexních čísel.
. Komplexní čísla Inegrovaná sřední škola, Kumburská 846, Nová Paka Auomaizace maemaika v auomaizaci Maemaika v auomaizaci - pro řešení regulačních obvodů: Komplexní číslo je bod v rovině komplexních čísel.
Kinematika hmotného bodu
 DOPLŇKOVÉ TEXTY BB1 PAVEL SCHAUER INTERNÍ MATERIÁL FAST VUT V BRNĚ Kinemik hmoného bodu Obsh Klsická mechnik... Vzžný sysém... Polohoý ekor... Trjekorie... Prmerické ronice rjekorie... 3 Příkld 1... 3
DOPLŇKOVÉ TEXTY BB1 PAVEL SCHAUER INTERNÍ MATERIÁL FAST VUT V BRNĚ Kinemik hmoného bodu Obsh Klsická mechnik... Vzžný sysém... Polohoý ekor... Trjekorie... Prmerické ronice rjekorie... 3 Příkld 1... 3
 ý ý Ž ů ý šň ý ú ú ý ý ý ó ý ý ý ů ň ýú ý š š ý ý š š š š ý ý ů ú š ý ý ů ý ý ů ú ů ů ú ů š š Ž ů ý ů ů ý ý ý šň ý ů ů š ý ýš ý š ýš ů ýš ýš ýš ýš ů ů ú š ú š ú ú š ů ň š ů ů ú ý ů ů ů ů ů ý ů š ý ů ý
ý ý Ž ů ý šň ý ú ú ý ý ý ó ý ý ý ů ň ýú ý š š ý ý š š š š ý ý ů ú š ý ý ů ý ý ů ú ů ů ú ů š š Ž ů ý ů ů ý ý ý šň ý ů ů š ý ýš ý š ýš ů ýš ýš ýš ýš ů ů ú š ú š ú ú š ů ň š ů ů ú ý ů ů ů ů ů ý ů š ý ů ý
REGULACE ČINNOSTI ELEKTRICKÝCH ZAŘÍZENÍ
 REGULACE ČINNOSTI ELEKTRICKÝCH ZAŘÍZENÍ Úvod Záporná zpěná vazba Úloha reguláoru Druhy reguláorů Seřízení reguláoru Snímaní informací o echnologickém procesu ELES11-1 Úvod Ovládání je řízení, při kerém
REGULACE ČINNOSTI ELEKTRICKÝCH ZAŘÍZENÍ Úvod Záporná zpěná vazba Úloha reguláoru Druhy reguláorů Seřízení reguláoru Snímaní informací o echnologickém procesu ELES11-1 Úvod Ovládání je řízení, při kerém
Digitální učební materiál
 Digiální učení meriál Číslo projeku CZ..7/../.8 Náev projeku Zkvlinění výuk prosřednicvím ICT Číslo náev šlon klíčové kivi III/ Inovce kvlinění výuk prosřednicvím ICT Příjemce podpor Gmnáium, Jevíčko,
Digiální učení meriál Číslo projeku CZ..7/../.8 Náev projeku Zkvlinění výuk prosřednicvím ICT Číslo náev šlon klíčové kivi III/ Inovce kvlinění výuk prosřednicvím ICT Příjemce podpor Gmnáium, Jevíčko,
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 10. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
CVIČENÍ Z ELEKTRONIKY
 Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
Střední růmyslová škola elektrotechnická Pardubice CVIČENÍ Z ELEKRONIKY Harmonická analýza Příjmení : Česák Číslo úlohy : Jméno : Petr Datum zadání :.1.97 Školní rok : 1997/98 Datum odevzdání : 11.1.97
SIMULACE. Numerické řešení obyčejných diferenciálních rovnic. Měřicí a řídicí technika přednášky LS 2006/07
 Měřicí a řídicí echnika přednášky LS 26/7 SIMULACE numerické řešení diferenciálních rovnic simulační program idenifikace modelu Numerické řešení obyčejných diferenciálních rovnic krokové meody pro řešení
Měřicí a řídicí echnika přednášky LS 26/7 SIMULACE numerické řešení diferenciálních rovnic simulační program idenifikace modelu Numerické řešení obyčejných diferenciálních rovnic krokové meody pro řešení
IDENTIFIKACE SYSTÉMŮ
 Vysoká škol báňská Tchnická univrzi Osrv IDENTIFIKACE SYSTÉMŮ učbní x Miln Vrožin, Zor Jnčíková, Jiří Dvid Osrv Rcnz: rof. Ing. F. Němc, CSc. RNDr. Miroslv išk, CSc. Názv: IDENTIFIKACE SYSTÉMŮ Auor: Miln
Vysoká škol báňská Tchnická univrzi Osrv IDENTIFIKACE SYSTÉMŮ učbní x Miln Vrožin, Zor Jnčíková, Jiří Dvid Osrv Rcnz: rof. Ing. F. Němc, CSc. RNDr. Miroslv išk, CSc. Názv: IDENTIFIKACE SYSTÉMŮ Auor: Miln
Laplaceova transformace
 Lalaceova transformace EO2 Přednáška 3 Pavel Máša ÚVODEM Víme, že Fourierova transformace díky řísným odmínkám existence neexistuje ro řadu běžných signálů dokonce i funkce sin musela být zatlumena Jak
Lalaceova transformace EO2 Přednáška 3 Pavel Máša ÚVODEM Víme, že Fourierova transformace díky řísným odmínkám existence neexistuje ro řadu běžných signálů dokonce i funkce sin musela být zatlumena Jak
2.3.6 Práce plynu. Předpoklady: 2305
 .3.6 Práce lynu Předoklady: 305 Děje v lynech nejčastěji zobrazujeme omocí diagramů grafů závislosti tlaku na objemu. Na x-ovou osu vynášíme objem a na y-ovou osu tlak. Př. : Na obrázku je nakreslen diagram
.3.6 Práce lynu Předoklady: 305 Děje v lynech nejčastěji zobrazujeme omocí diagramů grafů závislosti tlaku na objemu. Na x-ovou osu vynášíme objem a na y-ovou osu tlak. Př. : Na obrázku je nakreslen diagram
Využití logaritmů při řešení exponenciálních závislostí a exponenciálních rovnic
 .9.7 Vužií logrimů ři řešení eonenciálních závislosí eonenciálních rovnic Předokld: 9 Logrim jsme objevili, roože jsme nedokázli řeši někeré úloh. Zkusíme, zd s jejich omocí roblém vřešíme. Př. : Inenzi
.9.7 Vužií logrimů ři řešení eonenciálních závislosí eonenciálních rovnic Předokld: 9 Logrim jsme objevili, roože jsme nedokázli řeši někeré úloh. Zkusíme, zd s jejich omocí roblém vřešíme. Př. : Inenzi
ROVNICE, NEROVNICE A PRŮBĚH FUNKCÍ
 MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA MATEMATICKÁ SEKCE ROVNICE, NEROVNICE A PRŮBĚH FUNKCÍ (EQUATIONS, UNEQUATIONS AND BEHAVIOUR OF FUNCTIONS) RIGORÓZNÍ PRÁCE OBOR UČITELSTVÍ MATEMATIKY PRO STŘEDNÍ
MASARYKOVA UNIVERZITA PŘÍRODOVĚDECKÁ FAKULTA MATEMATICKÁ SEKCE ROVNICE, NEROVNICE A PRŮBĚH FUNKCÍ (EQUATIONS, UNEQUATIONS AND BEHAVIOUR OF FUNCTIONS) RIGORÓZNÍ PRÁCE OBOR UČITELSTVÍ MATEMATIKY PRO STŘEDNÍ
Obvodové rovnice v časové oblasti a v operátorovém (i frekvenčním) tvaru
 tvaru") Obvodové rovnice v časové oblasti a v oerátorovém (i frekvenčním) tvaru EO Přednáška 5 Pavel Máša - 5. řednáška ÚVODEM V ředchozím semestru jsme se seznámili s obvodovými rovnicemi v SUS a HUS Jak se liší,
Obvodové rovnice v časové oblasti a v oerátorovém (i frekvenčním) tvaru EO Přednáška 5 Pavel Máša - 5. řednáška ÚVODEM V ředchozím semestru jsme se seznámili s obvodovými rovnicemi v SUS a HUS Jak se liší,
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Řešení diferenciálních rovnic 1. řádu (lineárních, s konstantními koeficienty)
") Exonenciální funkce - jejic "vužití" ři řešení diferenciálníc rovnic (Tto dolňková omůck nemůže v žádném řídě nrdit sstemtickou mtemtickou řírvu.) Vlstností exonenciální funkce lze výodně oužít ři řešení
Exonenciální funkce - jejic "vužití" ři řešení diferenciálníc rovnic (Tto dolňková omůck nemůže v žádném řídě nrdit sstemtickou mtemtickou řírvu.) Vlstností exonenciální funkce lze výodně oužít ři řešení
ZMĚNY SKUPENSTVÍ LÁTEK
 ZMĚNY SUPENSTÍ LÁTE evné láky ání uhnuí kaalné láky desublimace sublimace vyařování kaalnění (kondenzace) lynné láky 1. Tání a uhnuí amorfní láky nemají bod ání ají osuně X krysalické láky ají ři určiém
ZMĚNY SUPENSTÍ LÁTE evné láky ání uhnuí kaalné láky desublimace sublimace vyařování kaalnění (kondenzace) lynné láky 1. Tání a uhnuí amorfní láky nemají bod ání ají osuně X krysalické láky ají ři určiém
 ř Ú Ú šň ůš Í š ň ž Ú ó ž ý ó Ú ý ž ý Ú Ú Ú ý ř ý ý ý ň ň Ť ú Ú ú Ž Ú ý ú Ú Ž Ú ýš ú ýš ú Ú Ú Ú ýš Ú ř ýš ýš Ú ů ř ýš ú ř Ž Ú ž Ú Ž řň ýš ř š Č ú Č ú ř Č ď ř ň Ú Č š š Ě ú ř ý ř Š Ó Č ú Ž ž ř ž ň ý ú Č
ř Ú Ú šň ůš Í š ň ž Ú ó ž ý ó Ú ý ž ý Ú Ú Ú ý ř ý ý ý ň ň Ť ú Ú ú Ž Ú ý ú Ú Ž Ú ýš ú ýš ú Ú Ú Ú ýš Ú ř ýš ýš Ú ů ř ýš ú ř Ž Ú ž Ú Ž řň ýš ř š Č ú Č ú ř Č ď ř ň Ú Č š š Ě ú ř ý ř Š Ó Č ú Ž ž ř ž ň ý ú Č
14. Soustava lineárních rovnic s parametrem
 @66 4. Sousava lineárních rovnic s aramerem Hned úvodem uozorňuji, že je velký rozdíl mezi sousavou rovnic řešenou aramerizováním, roože má nekonečně mnoho řešení zadaná sousava rovnic obsahuje jen číselné
@66 4. Sousava lineárních rovnic s aramerem Hned úvodem uozorňuji, že je velký rozdíl mezi sousavou rovnic řešenou aramerizováním, roože má nekonečně mnoho řešení zadaná sousava rovnic obsahuje jen číselné
1.5.1 Mechanická práce I
 .5. Mechanická ráce I Předoklady: Práce je velmi vděčné éma k rozhovoru: někdo se nadře a ráce za ním není žádná, jiný se ani nezaoí a udělá oho sousu, a všichni se cíí nedocenění. Fyzika je řírodní věda
.5. Mechanická ráce I Předoklady: Práce je velmi vděčné éma k rozhovoru: někdo se nadře a ráce za ním není žádná, jiný se ani nezaoí a udělá oho sousu, a všichni se cíí nedocenění. Fyzika je řírodní věda
Čas v kvantové. mechanice. Pavel Cejnar. ÚČJF MFF UK mff.cuni.cz
 Čs v kvnové Pvel Cejnr mechnce ÚČJF MFF UK vel.cejnr @ mff.cun.cz Progrm: ) Zábvný úvod ) Nezábvné resumé QM 3) Relce neurčos E x 4) Neexonencální rozd Zenónův jev 5) Oeráor čsu 6) Šk čsu 7) Dskuze Slvdor
Čs v kvnové Pvel Cejnr mechnce ÚČJF MFF UK vel.cejnr @ mff.cun.cz Progrm: ) Zábvný úvod ) Nezábvné resumé QM 3) Relce neurčos E x 4) Neexonencální rozd Zenónův jev 5) Oeráor čsu 6) Šk čsu 7) Dskuze Slvdor
( ) 1.7.8 Statika I. Předpoklady: 1707
 1.7.8 Statika I. Předpoklady: 1707") .7.8 Sik I Přeokly: 707 Peoická oznámk: Hoinu rozěluji n vě čási. V rvní čási (5 minu) očíáme rvní čyři říkly, ve ruhé (0 minu) zývjící ři. Př. : N koncích yče o hmonosi 0 k élce m jsou zvěšen závží o
.7.8 Sik I Přeokly: 707 Peoická oznámk: Hoinu rozěluji n vě čási. V rvní čási (5 minu) očíáme rvní čyři říkly, ve ruhé (0 minu) zývjící ři. Př. : N koncích yče o hmonosi 0 k élce m jsou zvěšen závží o
Pasivní tvarovací obvody RC
 Sřední průmyslová škola elekroechnická Pardubice CVIČENÍ Z ELEKTRONIKY Pasivní varovací obvody RC Příjmení : Česák Číslo úlohy : 3 Jméno : Per Daum zadání : 7.0.97 Školní rok : 997/98 Daum odevzdání :
Sřední průmyslová škola elekroechnická Pardubice CVIČENÍ Z ELEKTRONIKY Pasivní varovací obvody RC Příjmení : Česák Číslo úlohy : 3 Jméno : Per Daum zadání : 7.0.97 Školní rok : 997/98 Daum odevzdání :
, p = c + jω nejsou zde uvedeny všechny vlastnosti viz lit.
 Statiké a dynamiké harakteristiky Úvod : Základy Laplaeovy transformae dále LT: viz lit. hlavní užití: - převádí difereniální rovnie na algebraiké (nehomogenní s konstantními koefiienty - usnadňuje řešení
Statiké a dynamiké harakteristiky Úvod : Základy Laplaeovy transformae dále LT: viz lit. hlavní užití: - převádí difereniální rovnie na algebraiké (nehomogenní s konstantními koefiienty - usnadňuje řešení
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
9 Viskoelastické modely
 9 Viskoelasické modely Polymerní maeriály se chovají viskoelasicky, j. pod vlivem mechanického namáhání reagují současně jako pevné hookovské láky i jako viskózní newonské kapaliny. Viskoelasické maeriály
9 Viskoelasické modely Polymerní maeriály se chovají viskoelasicky, j. pod vlivem mechanického namáhání reagují současně jako pevné hookovské láky i jako viskózní newonské kapaliny. Viskoelasické maeriály
Kopie z www.dschuchlik.cz
 ó š ó Ň Ť ú š ú š š š ř Ú ó ú ň ú š řš ř řš ř ú ú ú ú ř ú ň ů ů š ň ú š řš ú ř ó š Ý Á ů ú úř š ň š ú š š š š ťť ř ň ů ř ř ř š ů ů ů řš ř ú ú ř ň ř ů ř ř ú ř ř ú ú ř ř ú ří š š ř ů ú Ú ř ú ÚČ ú ú ú š ů
ó š ó Ň Ť ú š ú š š š ř Ú ó ú ň ú š řš ř řš ř ú ú ú ú ř ú ň ů ů š ň ú š řš ú ř ó š Ý Á ů ú úř š ň š ú š š š š ťť ř ň ů ř ř ř š ů ů ů řš ř ú ú ř ň ř ů ř ř ú ř ř ú ú ř ř ú ří š š ř ů ú Ú ř ú ÚČ ú ú ú š ů
Komplexní čísla tedy násobíme jako dvojčleny s tím, že použijeme vztah i 2 = 1. = (a 1 + ia 2 )(b 1 ib 2 ) b 2 1 + b2 2.
(b 1 ib 2 ) b 2 1 + b2 2.") 7 Komplexní čísl 71 Komplexní číslo je uspořádná dvojice reálných čísel Komplexní číslo = 1, ) zprvidl zpisujeme v tzv lgebrickém tvru = 1 + i, kde i je imginární jednotk, pro kterou pltí i = 1 Číslo 1
7 Komplexní čísl 71 Komplexní číslo je uspořádná dvojice reálných čísel Komplexní číslo = 1, ) zprvidl zpisujeme v tzv lgebrickém tvru = 1 + i, kde i je imginární jednotk, pro kterou pltí i = 1 Číslo 1
Systémové struktury - základní formy spojování systémů
 Systémové struktury - základní formy sojování systémů Základní informace Při řešení ať již analytických nebo syntetických úloh se zravidla setkáváme s komlikovanými systémovými strukturami. Tato lekce
Systémové struktury - základní formy sojování systémů Základní informace Při řešení ať již analytických nebo syntetických úloh se zravidla setkáváme s komlikovanými systémovými strukturami. Tato lekce
1141 HYA (Hydraulika)
") ČVUT v Prze, fkul svební kedr hdrulik hdrologie (K4) Přednáškové slid ředměu 4 HYA (Hdrulik) verze: 09/008 K4 v ČVUT To webová sránk nbízí k nhlédnuí/sžení řdu df souborů složených z řednáškových slidů
ČVUT v Prze, fkul svební kedr hdrulik hdrologie (K4) Přednáškové slid ředměu 4 HYA (Hdrulik) verze: 09/008 K4 v ČVUT To webová sránk nbízí k nhlédnuí/sžení řdu df souborů složených z řednáškových slidů
Kmitání tělesa s danou budicí frekvencí
 EVROPSKÝ SOCIÁLNÍ FOND Kmiání ělesa s danou budicí frekvencí PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení echnické v Praze, Fakula savební, Kaedra maemaiky Posílení vazby eoreických předměů
EVROPSKÝ SOCIÁLNÍ FOND Kmiání ělesa s danou budicí frekvencí PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI České vysoké učení echnické v Praze, Fakula savební, Kaedra maemaiky Posílení vazby eoreických předměů
2.1 - ( ) ( ) (020201) [ ] [ ]
![2.1 - ( ) ( ) (020201) [ ] [ ]](/thumbs/102/155984102.jpg "2.1 - ( ) ( ) (020201) [ ] [ ]") - FUNKCE A ROVNICE Následující zákldní znlosti je nezbytně nutné umět od okmžiku probrání ž do konce studi mtemtiky n gymnáziu. Vyždováno bude porozumění schopnost plikovt ne pouze mechnicky zopkovt. Některé
- FUNKCE A ROVNICE Následující zákldní znlosti je nezbytně nutné umět od okmžiku probrání ž do konce studi mtemtiky n gymnáziu. Vyždováno bude porozumění schopnost plikovt ne pouze mechnicky zopkovt. Některé
transformace Idea afinního prostoru Definice afinního prostoru velké a stejně orientované.
 finní ransformace je posunuí plus lineární ransformace má svou maici vzhledem k homogenním souřadnicím využií například v počíačové grafice [] Idea afinního prosoru BI-LIN, afinia, 3, P. Olšák [2] Lineární
finní ransformace je posunuí plus lineární ransformace má svou maici vzhledem k homogenním souřadnicím využií například v počíačové grafice [] Idea afinního prosoru BI-LIN, afinia, 3, P. Olšák [2] Lineární
Téma 9: Aplikace metody POPV
 Tém 9: Aplikce meody POPV Přednášk z předměu: Prvděpodobnosní posuzování konsrukcí 4. ročník bklářského sudi Kedr svební mechniky Fkul svební Vysoká škol báňská Technická univerzi Osrv Osnov přednášky
Tém 9: Aplikce meody POPV Přednášk z předměu: Prvděpodobnosní posuzování konsrukcí 4. ročník bklářského sudi Kedr svební mechniky Fkul svební Vysoká škol báňská Technická univerzi Osrv Osnov přednášky
ZPĚTNÁ TRANSFORMACE RACIONÁLNĚ LOMENÉ FUNKCE
 Tor řízí I Zěá lcov rformc TEHNIKÁ UNIVERZIT V IBERI Hálkov 6 46 7 brc Z Fkul mchroky mzoborových žýrkých udí Tor uomckého řízí I ZPĚTNÁ TRNSFORE RIONÁNĚ OENÉ FUNKE Sudjí mrály Doc Ig Ovld odrlák Sc Kdr
Tor řízí I Zěá lcov rformc TEHNIKÁ UNIVERZIT V IBERI Hálkov 6 46 7 brc Z Fkul mchroky mzoborových žýrkých udí Tor uomckého řízí I ZPĚTNÁ TRNSFORE RIONÁNĚ OENÉ FUNKE Sudjí mrály Doc Ig Ovld odrlák Sc Kdr
Motivácia. Väčšina úloh vo fyzike je založená na hľadaní závislosti nejakých veličín od iných veľmi často od času: x(t) U(t) I(t)
 U(t) I(t)") Moiváci Väčšin úloh vo fyzike je zložená n hľdní závislosi nejkých veličín od iných veľmi čso od čsu: () U() I() Väčšin fyzikálnych zákonov nehovorí primo o ýcho čsových priebehoch, le o om, ko rýchlo
Moiváci Väčšin úloh vo fyzike je zložená n hľdní závislosi nejkých veličín od iných veľmi čso od čsu: () U() I() Väčšin fyzikálnych zákonov nehovorí primo o ýcho čsových priebehoch, le o om, ko rýchlo
Dynamika hmotného bodu. Petr Šidlof
 Per Šidlof Úvod opakování () saika DYNAMIKA kinemaika Dynamika hmoného bodu Dynamika uhého ělesa Dynamika elasických ěles Teorie kmiání Aranz/Bombardier (Norwegian BM73) Před Galileem, Newonem: k udržení
Per Šidlof Úvod opakování () saika DYNAMIKA kinemaika Dynamika hmoného bodu Dynamika uhého ělesa Dynamika elasických ěles Teorie kmiání Aranz/Bombardier (Norwegian BM73) Před Galileem, Newonem: k udržení
10 Transformace 3D. 10.1 Transformace a jejich realizace. Studijní cíl. Doba nutná k nastudování. Průvodce studiem
 Trnsformce 3D Sudijní cíl Teno blok je věnován rnsformcím 3D grfik. V eu budou popsán ákldní rnsformce v prosoru posunuí oočení kosení měn měřík používné při prcování 3D modelu. Jednolivé rnsformce budou
Trnsformce 3D Sudijní cíl Teno blok je věnován rnsformcím 3D grfik. V eu budou popsán ákldní rnsformce v prosoru posunuí oočení kosení měn měřík používné při prcování 3D modelu. Jednolivé rnsformce budou
Gaussovská prvočísla
 Středoškolská odborná činnost 2005/2006 Obor 01 mtemtik mtemtická informtik Gussovská rvočísl Autor: Jkub Oršl Gymnázium Brno, tř. Kt. Jroše 14, 658 70 Brno, 4.A Konzultnt ráce: Mgr. Viktor Ježek (Gymnázium
Středoškolská odborná činnost 2005/2006 Obor 01 mtemtik mtemtická informtik Gussovská rvočísl Autor: Jkub Oršl Gymnázium Brno, tř. Kt. Jroše 14, 658 70 Brno, 4.A Konzultnt ráce: Mgr. Viktor Ježek (Gymnázium
O s 0 =d s Obr. 2. 1
 3 KINEMATIKA BODU Kinemik jko čás mechniky je nuk o pohybu ěles bez ohledu n síly, keré pohyb způsobily Těles nebudou mí nšich úhách hmonos budou popsán jen sými geomerickými lsnosmi Ty budou během pohybu
3 KINEMATIKA BODU Kinemik jko čás mechniky je nuk o pohybu ěles bez ohledu n síly, keré pohyb způsobily Těles nebudou mí nšich úhách hmonos budou popsán jen sými geomerickými lsnosmi Ty budou během pohybu
x + F F x F (x, f(x)).
).") I. Funkce dvou více reálných proměnných 8. Implicitně dné funkce. Budeme se zbývt úlohou, kdy funkce není zdná přímo předpisem, který vyjdřuje závislost její hodnoty n hodnotách proměnných. Jeden z možných
I. Funkce dvou více reálných proměnných 8. Implicitně dné funkce. Budeme se zbývt úlohou, kdy funkce není zdná přímo předpisem, který vyjdřuje závislost její hodnoty n hodnotách proměnných. Jeden z možných
Technická kybernetika. Regulační obvod. Obsah
 Akdemický rok 6/7 Připrvil: Rdim Frn echnická kybernetik Anlogové číslicové regulátory Stbilit spojitých lineárních systémů Obsh Zákldní přenosy regulčního obvodu. Anlogové regulátory. Číslicové regulátory.
Akdemický rok 6/7 Připrvil: Rdim Frn echnická kybernetik Anlogové číslicové regulátory Stbilit spojitých lineárních systémů Obsh Zákldní přenosy regulčního obvodu. Anlogové regulátory. Číslicové regulátory.
SYNTÉZA FYZIKÁLNÍHO OPTIMÁLNÍHO SYSTÉMU
 Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN 97887395443. SYNTÉZA FYZIKÁLNÍHO OPTIMÁLNÍHO SYSTÉMU Miroslav Barvíř Konec. a
Křua Jiří, Víe Miloš (edioři). Sysémové onfliy. Vydání rvní, nálad, Vydavaelsví Univerziy Pardubice: Pardubice,, 56 s. ISBN 97887395443. SYNTÉZA FYZIKÁLNÍHO OPTIMÁLNÍHO SYSTÉMU Miroslav Barvíř Konec. a
Přenos pasivního dvojbranu RC
 Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
Střední průmyslová škola elektrotechnická Pardubice VIČENÍ Z ELEKTRONIKY Přenos pasivního dvojbranu R Příjmení : Česák Číslo úlohy : 1 Jméno : Petr Datum zadání : 7.1.97 Školní rok : 1997/98 Datum odevzdání
GONIOMETRICKÉ ROVNICE -
 1 GONIOMETRICKÉ ROVNICE - Pois zůsobu oužití: teorie k samostudiu (i- learning) ro 3. ročník střední školy technického zaměření, teorie ke konzultacím dálkového studia Vyracovala: Ivana Klozová Datum vyracování:
1 GONIOMETRICKÉ ROVNICE - Pois zůsobu oužití: teorie k samostudiu (i- learning) ro 3. ročník střední školy technického zaměření, teorie ke konzultacím dálkového studia Vyracovala: Ivana Klozová Datum vyracování:
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Rovnoměrně zrychlený pohyb v grafech
 ..9 Ronoměrně zrychlený pohyb grfech Předpokldy: 4 Př. : N obrázku jsou nkresleny grfy dráhy, rychlosi zrychlení ronoměrně zrychleného pohybu. Přiřď grfy eličinám. s,, ronoměrně zrychlený pohyb: zrychlení
..9 Ronoměrně zrychlený pohyb grfech Předpokldy: 4 Př. : N obrázku jsou nkresleny grfy dráhy, rychlosi zrychlení ronoměrně zrychleného pohybu. Přiřď grfy eličinám. s,, ronoměrně zrychlený pohyb: zrychlení
 ř ý ý é é ú ř ř é ů Ž é ř é ř ř ž ů ů ž ů č ů č é é š é ů Ž ů ó ž ý ů é ů ž š ť ř č ř é ó ú ž ý ů ý č ř č ř é é é ř ř ř é ů ř š ř ů č ý č č č š ý ř ů ř ř ů š š ř ž ý ů ř ů š ř ý ř É ů ž ž ř ž ž č š ů ř
ř ý ý é é ú ř ř é ů Ž é ř é ř ř ž ů ů ž ů č ů č é é š é ů Ž ů ó ž ý ů é ů ž š ť ř č ř é ó ú ž ý ů ý č ř č ř é é é ř ř ř é ů ř š ř ů č ý č č č š ý ř ů ř ř ů š š ř ž ý ů ř ů š ř ý ř É ů ž ž ř ž ž č š ů ř
Předmět: Ročník: Vytvořil: Datum: MATEMATIKA DRUHÝ Mgr. Tomáš MAŇÁK 11. červenec 2012 Název zpracovaného celku: LINEÁRNÍ ROVNICE S PARAMETREM
 Předmět: Ročník: Vytvořil: Dtum: MATEMATIA DRUHÝ Mgr. Tomáš MAŇÁ 11. červenec 01 Název zrcovného celku: LINEÁRNÍ ROVNICE S PARAMETREM LINEÁRNÍ ROVNICE S PARAMETREM Rovnice s rmetrem obshuje kromě neznámých
Předmět: Ročník: Vytvořil: Dtum: MATEMATIA DRUHÝ Mgr. Tomáš MAŇÁ 11. červenec 01 Název zrcovného celku: LINEÁRNÍ ROVNICE S PARAMETREM LINEÁRNÍ ROVNICE S PARAMETREM Rovnice s rmetrem obshuje kromě neznámých
 ú Í ŤÍ ď š ě ě ř šť Á Š É Š Ě š ě Č Č š ě é éř Í ě éč éř É šť ř é ě ý é Ž ů ů ň Č Č Č Š ř ý Ó ý š ě ý ř é ě ý Í ž š é š ě ě š ě é é ý é ě ý Ž éř Ž Š Ž ř Šť éř Í ř Č Č Č ě ý éř Í Ž ě ě ý éř Í ř šť ěř é
ú Í ŤÍ ď š ě ě ř šť Á Š É Š Ě š ě Č Č š ě é éř Í ě éč éř É šť ř é ě ý é Ž ů ů ň Č Č Č Š ř ý Ó ý š ě ý ř é ě ý Í ž š é š ě ě š ě é é ý é ě ý Ž éř Ž Š Ž ř Šť éř Í ř Č Č Č ě ý éř Í Ž ě ě ý éř Í ř šť ěř é
 Č Ř É Ž É č č ó š š ř é é ř é ě ř é š č úč ů ř é Ú ý č č ř é ř Ž Č Č Č ě é č ř ě ř é ě é č č ě č é č č é ó ý č ý č é ó é ó ý č ý ěř č ý ěř č ý ěř š é ě ř é č š ú ěč é úř Ú ý š ě ě č ř ě ř é é ěč č ě ř
Č Ř É Ž É č č ó š š ř é é ř é ě ř é š č úč ů ř é Ú ý č č ř é ř Ž Č Č Č ě é č ř ě ř é ě é č č ě č é č č é ó ý č ý č é ó é ó ý č ý ěř č ý ěř č ý ěř š é ě ř é č š ú ěč é úř Ú ý š ě ě č ř ě ř é é ěč č ě ř
Analogový komparátor
 Analogový komparáor 1. Zadání: A. Na předloženém inverujícím komparáoru s hyserezí změře: a) převodní saickou charakerisiku = f ( ) s diodovým omezovačem při zvyšování i snižování vsupního napěí b) zaěžovací
Analogový komparáor 1. Zadání: A. Na předloženém inverujícím komparáoru s hyserezí změře: a) převodní saickou charakerisiku = f ( ) s diodovým omezovačem při zvyšování i snižování vsupního napěí b) zaěžovací
Nakloněná rovina II
 3 Nakloněná rovina II Předoklady: Pedagogická oznáka: Obsah hodiny se za norálních okolnosí saozřejě nedá sihnou, záleží na Vás, co si vyberee Pedagogická oznáka: Na začáku hodiny zadá sudenů říklad Nečeká
3 Nakloněná rovina II Předoklady: Pedagogická oznáka: Obsah hodiny se za norálních okolnosí saozřejě nedá sihnou, záleží na Vás, co si vyberee Pedagogická oznáka: Na začáku hodiny zadá sudenů říklad Nečeká
ZÁKLADY ELEKTRICKÝCH POHONŮ (EP) Určeno pro posluchače bakalářských studijních programů FS
 Určeno pro posluchače bakalářských studijních programů FS") ZÁKLADY ELEKTRICKÝCH OHONŮ (E) Určeno pro posluchače bakalářských sudijních programů FS Obsah 1. Úvod (definice, rozdělení, provozní pojmy,). racovní savy pohonu 3. Základy mechaniky a kinemaiky pohonu
ZÁKLADY ELEKTRICKÝCH OHONŮ (E) Určeno pro posluchače bakalářských sudijních programů FS Obsah 1. Úvod (definice, rozdělení, provozní pojmy,). racovní savy pohonu 3. Základy mechaniky a kinemaiky pohonu
ZÁKLADY. y 1 + y 2 dx a. kde y je hledanou funkcí proměnné x.
 VARIAČNÍ POČET ZÁKLADY V prxi se čsto hledjí křivky nebo plochy, které minimlizují nebo mximlizují jisté hodnoty. Npř. se hledá nejkrtší spojnice dvou bodů n dné ploše, nebo tvr zvěšeného ln (má minimální
VARIAČNÍ POČET ZÁKLADY V prxi se čsto hledjí křivky nebo plochy, které minimlizují nebo mximlizují jisté hodnoty. Npř. se hledá nejkrtší spojnice dvou bodů n dné ploše, nebo tvr zvěšeného ln (má minimální
DERIVACE A INTEGRÁLY VE FYZICE
 DOPLŇKOVÉ TEXTY BB0 PAVEL SCHAUER INTERNÍ MATERIÁL FAST VUT V BRNĚ DERIVACE A INTEGRÁLY VE FYZICE Obsh Derivce... Definice derivce... Prciální derivce... Derivce vektorů... Výpočt derivcí... 3 Algebrická
DOPLŇKOVÉ TEXTY BB0 PAVEL SCHAUER INTERNÍ MATERIÁL FAST VUT V BRNĚ DERIVACE A INTEGRÁLY VE FYZICE Obsh Derivce... Definice derivce... Prciální derivce... Derivce vektorů... Výpočt derivcí... 3 Algebrická
Měřicí a řídicí technika magisterské studium FTOP - přednášky ZS 2009/10. měřicí člen. porovnávací. člen. REGULÁTOR ruční řízení
 Měřicí a řídicí echnia magisersé sudium FTOP - přednášy ZS 29/1 REGULACE regulované sousavy sandardní signály ační členy reguláory Bloové schéma regulačního obvodu z u regulovaná sousava y ační člen měřicí
Měřicí a řídicí echnia magisersé sudium FTOP - přednášy ZS 29/1 REGULACE regulované sousavy sandardní signály ační členy reguláory Bloové schéma regulačního obvodu z u regulovaná sousava y ační člen měřicí
MECHANICKÉ KMITÁNÍ TLUMENÉ
 MECHNICKÉ KMITÁNÍ TLUMENÉ V skučnosi s čás nrgi u všch mchanických pohybů přměňuj vlivm řní a odporu prosřdí na plo, a nní dy využia V om případě s vlikosi po sobě jdoucích ampliud zmnšují a kmiající sousava
MECHNICKÉ KMITÁNÍ TLUMENÉ V skučnosi s čás nrgi u všch mchanických pohybů přměňuj vlivm řní a odporu prosřdí na plo, a nní dy využia V om případě s vlikosi po sobě jdoucích ampliud zmnšují a kmiající sousava
 ř ů ž ěř ř ů ř ý ý ř ů ů Č Č ú Í ř ř ě ř ě ý ž ě ěř ř ú ý ý Č ě ř ěř ú ě ý ý ř úč ě Á Á É ř Í ů ů ř ž ú ě ř ř ů ý Í ř ú Ž ý ú š ě Č ř ů Í ě ř ú ě ě ú ú ě ř ů ě ý ú ě ě ý ý Í ý ú Ť ý ř Ú ž ý ř ú ě ý ů ě
ř ů ž ěř ř ů ř ý ý ř ů ů Č Č ú Í ř ř ě ř ě ý ž ě ěř ř ú ý ý Č ě ř ěř ú ě ý ý ř úč ě Á Á É ř Í ů ů ř ž ú ě ř ř ů ý Í ř ú Ž ý ú š ě Č ř ů Í ě ř ú ě ě ú ú ě ř ů ě ý ú ě ě ý ý Í ý ú Ť ý ř Ú ž ý ř ú ě ý ů ě
Impedanční děliče - příklady
 Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
je jedna z orientací určena jeho parametrizací. Je to ta, pro kterou je počátečním bodem bod ϕ(a). Im k.b.(c ) ( C ) (C ) Obr Obr. 3.5.
. Im k.b.(c ) ( C ) (C ) Obr Obr. 3.5.") 10. Komplexní funkce reálné proměnné. Křivky. Je-li f : (, b) C, pk lze funkci f povžovt z dvojici (u, v), kde u = Re f v = Im f. Rozdíl proti vektorovému poli je v tom, že jsou pro komplexní čísl definovány
10. Komplexní funkce reálné proměnné. Křivky. Je-li f : (, b) C, pk lze funkci f povžovt z dvojici (u, v), kde u = Re f v = Im f. Rozdíl proti vektorovému poli je v tom, že jsou pro komplexní čísl definovány
TECHNICKÁ UNIVERZITA V LIBERCI
 TECHNCKÁ UNVERZTA V LBERC Fakula mecharoniky, informaiky a mezioborových sudií Cvičení č3 k ředměu ELMO Přírava ke cvičení ng Jiří Primas, ng Michal Malík Liberec Maeriál vznikl v rámci rojeku ESF (CZ7//747)
TECHNCKÁ UNVERZTA V LBERC Fakula mecharoniky, informaiky a mezioborových sudií Cvičení č3 k ředměu ELMO Přírava ke cvičení ng Jiří Primas, ng Michal Malík Liberec Maeriál vznikl v rámci rojeku ESF (CZ7//747)
Analytická metoda aneb Využití vektorů v geometrii
 KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
KM/GVS Geometrické vidění světa (Design) nalytická metoda aneb Využití vektorů v geometrii Použité značky a symboly R, C, Z obor reálných, komleních, celých čísel geometrický vektor R n aritmetický vektor
1.5.4 Kinetická energie
 .5.4 Kineicá energie Předolady: 50 Energie je jeden z nejoužívanějších, ale aé nejhůře definovaelných ojmů ve sředošolsé fyzice. V běžném živoě: energie = něco, co ořebujeme vyonávání ráce. Vysyuje se
.5.4 Kineicá energie Předolady: 50 Energie je jeden z nejoužívanějších, ale aé nejhůře definovaelných ojmů ve sředošolsé fyzice. V běžném živoě: energie = něco, co ořebujeme vyonávání ráce. Vysyuje se
Prezentace diplomové práce: CNC hydraulický ohraňovací lis Student: Školitel: Konzultant: Zadavatel: Klíčová slova: CNC hydraulic press brake Keyword:
 Horská 3, 8 00 Praha Prezenace dilomové ráce: CNC hydraulický ohraňovací lis Suden: Školiel: Konzulan: Zadavael: Klíčová slova: Anoace: Cíle ráce: CNC hydraulic ress brake Keyword: Annoaion: Targe of work:
Horská 3, 8 00 Praha Prezenace dilomové ráce: CNC hydraulický ohraňovací lis Suden: Školiel: Konzulan: Zadavael: Klíčová slova: Anoace: Cíle ráce: CNC hydraulic ress brake Keyword: Annoaion: Targe of work:
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Semestrální práce z předmětu KMA/MM
 Semesrální práe z předměu KMA/MM Mehniký elekron oniký osiláor, modely kmiů Jn Königsmrková A73, FAV 3. ročník Akdemiký rok 9/ Osh:. KMITAVÝ POHYB.... NETLUMENÉ A TLUMENÉ KMITY, NUCENÉ KMITY..3 3. DIFERENCIÁLNÍ
Semesrální práe z předměu KMA/MM Mehniký elekron oniký osiláor, modely kmiů Jn Königsmrková A73, FAV 3. ročník Akdemiký rok 9/ Osh:. KMITAVÝ POHYB.... NETLUMENÉ A TLUMENÉ KMITY, NUCENÉ KMITY..3 3. DIFERENCIÁLNÍ
5 DISKRÉTNÍ ROZDĚLENÍ PRAVDĚPODOBNOSTI. Čas ke studiu kapitoly: 120 minut. Cíl: Po prostudování tohoto odstavce budete umět:
 5 DISKRÉTNÍ ROZDĚLENÍ RAVDĚODOBNOSTI Čas e sudiu aioly: 0 miu Cíl: o rosudováí ohoo odsavce budee umě: charaerizova hyergeomericé rozděleí charaerizova Beroulliho ousy a z ich odvozeé jedolivé yy disréích
5 DISKRÉTNÍ ROZDĚLENÍ RAVDĚODOBNOSTI Čas e sudiu aioly: 0 miu Cíl: o rosudováí ohoo odsavce budee umě: charaerizova hyergeomericé rozděleí charaerizova Beroulliho ousy a z ich odvozeé jedolivé yy disréích
STATICKÉ A DYNAMICKÉ VLASTNOSTI ZAŘÍZENÍ
 STATICKÉ A DYNAMICKÉ VLASTNOSTI ZAŘÍZENÍ Saické a dnamické vlasnosi paří k základním vlasnosem regulovaných sousav, měřicích přísrojů, měřicích řeězců či jejich čásí. Zaímco saické vlasnosi se projevují
STATICKÉ A DYNAMICKÉ VLASTNOSTI ZAŘÍZENÍ Saické a dnamické vlasnosi paří k základním vlasnosem regulovaných sousav, měřicích přísrojů, měřicích řeězců či jejich čásí. Zaímco saické vlasnosi se projevují
6 Algebra blokových schémat
 6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6 Algebra blokových schémat Operátorovým přenosem jsme doposud popisovali chování jednotlivých dynamických členů. Nic nám však nebrání, abychom přenosem popsali dynamické vlastnosti složitějších obvodů,
6. Teorie systém. 6.2 Základní pojmy obecné teorie systém
 Erne 4 6 Teorie yém 6 Hiorie eorie yém Iniivní edv - yém jo množin elemen eré jo vázány njým vzhem mezi ebo To definovl yém Ldwig von Berlnfy n oá icáých le Prof Berlnfy e zbývl eorií oevených yém imlovných
Erne 4 6 Teorie yém 6 Hiorie eorie yém Iniivní edv - yém jo množin elemen eré jo vázány njým vzhem mezi ebo To definovl yém Ldwig von Berlnfy n oá icáých le Prof Berlnfy e zbývl eorií oevených yém imlovných
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
PARAMETRICKÁ METODA VÝPOČTU FREKVENČNÍCH SPEKTER SIGNÁLŮ
 7 h Inernaional Scienific - echnical Conference - POCESS CONOL 006 June 3 6, 006, Kouy nad Desnou, Czech eublic PAAEICKÁ EODA VÝPOČU FEKVENČNÍCH SPEKE SIGNÁLŮ ŮA JIŘÍ Fakula srojní, VŠB echnická univerzia
7 h Inernaional Scienific - echnical Conference - POCESS CONOL 006 June 3 6, 006, Kouy nad Desnou, Czech eublic PAAEICKÁ EODA VÝPOČU FEKVENČNÍCH SPEKE SIGNÁLŮ ŮA JIŘÍ Fakula srojní, VŠB echnická univerzia
Předmět A3B31TES/Př. 7
 Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Stýskala, L e k c e z e l e k t r o t e c h n i k y. Vítězslav Stýskala TÉMA 6. Oddíl 1-2. Sylabus k tématu
 Sýskala, 22 L e k c e z e l e k r o e c h n i k y Víězslav Sýskala TÉA 6 Oddíl 1-2 Sylabus k émau 1. Definice elekrického pohonu 2. Terminologie 3. Výkonové dohody 4. Vyjádření pohybové rovnice 5. Pracovní
Sýskala, 22 L e k c e z e l e k r o e c h n i k y Víězslav Sýskala TÉA 6 Oddíl 1-2 Sylabus k émau 1. Definice elekrického pohonu 2. Terminologie 3. Výkonové dohody 4. Vyjádření pohybové rovnice 5. Pracovní
OBJÍMKA VÁZANÁ PRUŽINOU NA NEHLADKÉM OTOČNÉM RAMENI
 OBJÍMKA VÁZANÁ RUŽINOU NA NELAKÉM OTOČNÉM RAMENI SEIFIKAE ROBLÉMU Rameno čvercového průřezu roue konanní úhlovou rychloí ω Na něm e nasazena obímka hmonoi m s koeicienem ření mezi ní a ěnami ramene Obímka
OBJÍMKA VÁZANÁ RUŽINOU NA NELAKÉM OTOČNÉM RAMENI SEIFIKAE ROBLÉMU Rameno čvercového průřezu roue konanní úhlovou rychloí ω Na něm e nasazena obímka hmonoi m s koeicienem ření mezi ní a ěnami ramene Obímka
6. Vliv způsobu provozu uzlu transformátoru na zemní poruchy
 6. Vliv zůsobu rovozu uzlu transformátoru na zemní oruchy Zemní oruchou se rozumí sojení jedné nebo více fází se zemí. Zemní orucha může být zůsobena řeskokem na izolátoru, růrazem evné izolace, ádem řetrženého
6. Vliv zůsobu rovozu uzlu transformátoru na zemní oruchy Zemní oruchou se rozumí sojení jedné nebo více fází se zemí. Zemní orucha může být zůsobena řeskokem na izolátoru, růrazem evné izolace, ádem řetrženého
VIII. Primitivní funkce a Riemannův integrál
 VIII. Primitivní funkce Riemnnův integrál VIII.2. Riemnnův integrál opkování Vět. Nechť f je spojitá funkce n intervlu, b nechť c, b. Oznčíme-li F (x) = x (, b), pk F (x) = f(x) pro kždé x (, b). VIII.3.
VIII. Primitivní funkce Riemnnův integrál VIII.2. Riemnnův integrál opkování Vět. Nechť f je spojitá funkce n intervlu, b nechť c, b. Oznčíme-li F (x) = x (, b), pk F (x) = f(x) pro kždé x (, b). VIII.3.
LABORATORNÍ CVIENÍ Stední prmyslová škola elektrotechnická
 Sední rmslová škola elekroechnická a Všší odborná škola, Pardubice, Karla IV. 3 LABORATORNÍ CVIENÍ Sední rmslová škola elekroechnická Píjmení: Hladna íslo úloh: 2 Jméno: Jan Daum mení: 3. ÍJNA 2006 Školní
Sední rmslová škola elekroechnická a Všší odborná škola, Pardubice, Karla IV. 3 LABORATORNÍ CVIENÍ Sední rmslová škola elekroechnická Píjmení: Hladna íslo úloh: 2 Jméno: Jan Daum mení: 3. ÍJNA 2006 Školní