|
|
|
- Stanislava Svobodová
- před 6 lety
- Počet zobrazení:
Transkript
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
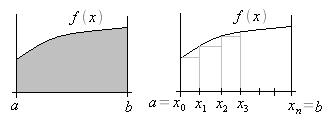
20 Interpolace Uvažujme třídu funkcí jedné proměnné ψ(x; a 0,..., a n ), kde a 0,..., a n jsou parametry, které popisují jednotlivé funkce této třídy. Mějme dány body x 0, x 1,..., x n, x i x k, i, k = 0, 1,... n. Úlohu interpolace můžeme vnímat ve dvou situacích: a) máme funkci f(x) danou složitým explicitním vyjádřením a chceme ji nahradit jednodušší funkcí ψ(x; a 0,..., a n ), tj. hledáme hodnoty parametrů a 0,..., a n tak, aby ψ(x i ; a 0,..., a n ) = f(x i ) i = 0,..., n b) máme pro každý bod x i dánu hodnotu f i, i = 0,..., n a hledáme funkci ψ(x i ; a 0,..., a n ), tj. hledáme parametry a 0,..., a n tak, aby ψ(x i ; a 0,..., a n ) = f i i = 0,..., n Tedy u interpolační aproximace hledáme funkci ψ(x; a 0,..., a n ) tak, aby byly splněny tzv. podmínky interpolace (interpolační podmínky): ψ(x; a 0,..., a n ) = f(x i ) i = 0,..., n Typy interpolace: ˆ lineární interpolace - funkci ψ(x; a 0,..., a n ) hledáme ve tvaru ψ(x; a 0,..., a n ) = a 0 ψ 0 (x) + + a n ψ n (x) ˆ trigonometrická interpolace - funkci ψ(x; a 0,..., a n ) hledáme ve tvaru ψ(x; a 0,..., a n ) = a 0 + a 1 e ix + + a n e inx ˆ racionální interpolace - funkci ψ hledáme ve tvaru ψ(x; a 0,..., a n, b 0,..., b n ) = a 0x n + a 1 x n a n 1 x + a n b 0 x n + b 1 x n b n 1 x + b n Mezi nejjednodušší typy patří lineární interpolace, do níž spadá i tzv. polynomiální interpolace, kdy funkci ψ hledáme ve tvaru polynomu ψ(x; a 0,..., a n ) = a 0 x n + a 1 x n a n 1 x + a n. 19
21 Polynomiální interpolace Mezi nejjednodušší úlohy lineární interpolace patří interpolace polynomy. Jedná se o tuto úlohu: Nechť jsou dány body {x i } n i=0, x i x k pro i k, i, k = 0, 1,..., n, a dále nechť jsou dány hodnoty funkce f(x) v bodech x i, i = 0, 1,..., n. Hledáme polynom P n (x) stupně nejvýše n takový, že splňuje podmínky interpolace (interpolační podmínky): P n (x i ) = f(x i ) i = 0, 1,..., n. Poznámka 1: 1) Je třeba mít na paměti, že je-li skutečně znám předpis funkce f(x), umíme vypočítat f(x i ) i. Není-li předpis funkce zadán a jsou-li pouze známy hodnoty f i i, jedná se o tutéž úlohu, kdy požadujeme P n (x i ) = f i i = 0, 1,..., n. Proto sjednotíme pro další výklad značení a označme f i = f(x i ) i. 2) Symbolem Π n budeme značit třídu všech polynomů stupně nejvýše n. 3) Body x i nazýváme uzly interpolace a polynom P n (x) Π n : P n (x i ) = f i i = 0, 1,, n nazýváme interpolační polynom. Aniž bychom cokoliv věděli z oblasti interpolace, lze interpolační polynom najít užitím soustavy lineárních rovnic. Máme-li dány body {x i } n i=0, x i x k pro i k, i, k = 0, 1,..., n a hodnoty f i, i = 0, 1,..., n a hledámeli P n (x) Π n, tj. P n (x) = a 0 x n + a 1 x n a n 1 x + a n takový, že P n (x i ) = f i i = 0, 1,..., n, lze tyto podmínky interpolace psát ve tvaru: P n (x 0 ) = a 0 x n 0 + a 1 x n a n 1 x 0 + a n = f 0 P n (x n ) = a 0 x n n + a 1 x n 1 n + + a n 1 x n + a n = f n Dostali jsme tedy soustavu (n + 1) lineárních rovnic o (n + 1) neznámých. Vzhledem k tomu, že funkce 1, x, x 2,..., x n jsou lineárně nezávislé existuje právě jedno řešení tohoto systému. Toto je metoda neurčitých koeficientů. Věta 1: Pro n + 1 dvojic (x i, f i ) i = 0, 1,..., n : x i x k pro i k existuje právě jeden polynom P n (x) Π n takový, že P n (x i ) = f i i = 0, 1,..., n. Polynom P n (x) = l 0 (x)f 0 +l 1 (x)f 1 + +l n (x)f n = n i=0 l i(x)f i nazýváme Lagrangeův interpolační polynom. 20
22 Poznámka 2: Polynomy l i (x) tvaru l i (x) = (x x 0)(x x 1 )... (x x i 1 )(x x i+1 )... (x x n ) (x i x 0 )(x i x 1 )... (x i x i 1 )(x i x i+1 )... (x i x n ) nazýváme fundamentální polynomy. Označíme-li ω n+1 (x) = n i=0 (x x i), potom ω n+1(x) = (x x 1 )(x x 2 )... (x x n ) + (x x 0 )(x x 2 )... (x x n ) + + (x x 0 )(x x 1 )... (x x n 2 )(x x n ) + (x x 0 )(x x 1 )... (x x n 1 ) a ω n+1(x i ) = (x i x 0 )(x i x 1 )... (x i x i 1 )(x i x i+1 )... (x i x n ). Pak lze psát fundamentální polynomy l i (x) ve tvaru ω n+1 (x) l i (x) = i = 0,..., n. (x x i )ω n+1(x i ) Poznámka 3: Fundamentální polynomy mají tu vlastnost, že n i=0 l i(x) = 1 x R. Vezmeme-li za funkci f(x) polynom n-tého stupně, je jejím interpolačním polynomem P n (x) Π n pro dané body (x i, f(x i )) právě funkce f(x). Jestliže f(x) = 1, pak také P n (x) = 1. Tedy 1 = P n (x) = n i=0 l i(x)f i = n i=0 l i(x). Lagrangeův interpolační polynom se využívá zejména pro odvození metod numerického derivování a integrování. Pro praktické použití není příliš ideální, neboť při změně počtu uzlů je třeba všechny fundamentální polynomy vypočítat znovu. Výhodnější pro praktické počítání je použít tzv. Newtonův interpolační polynom. Věta 2: Nechť P n (x) Π n je interpolační polynom pro data (x i, f i ) i = 0, 1... n, x i x k pro i k. Pak tento polynom lze psát ve tvaru: P n (x) = f 0 + (x x 0 )f[x 0, x 1 ]+(x x 0 )(x x 1 )f[x 0, x 1, x 2 ]+ +(x x 0 )... (x x n 1 )f[x 0, x 1,..., x n ], kde f[x 0, x 1,..., x n ] je poměrná diference n-tého řádu funkce f(x). Tento vzorec nazýváme Newtonův interpolační polynom. Chyba interpolace Otázkou je, s jakou přesností aproximujeme interpolační polynom funkce f(x) v bodech různých od uzlů, tj. zajímá nás rozdíl f(x) P n (x) x 21
23 x i, i = 0, 1,..., n. Budeme uvažovat pouze případ, kdy je funkce f(x) dána analyticky. Věta 3: Nechť funkce f(x) C n+1 a, b, x i a, b, x i x j pro i j, i, j = 0, 1,..., n,. Nechť P n (x) Π n je interpolační polynom takový, že P n (x i ) = f i i = 0, 1,..., n. Pak pro x a, b, x x i, i = 0,..., n ξ (a, b) takové, že E(x) = f( x) P n ( x) = ω n+1( x) (n + 1)! f (n+1) (ξ), kde ξ = ξ(x). Poznámka 4: 1) bod ξ závisí na x 2) rozdíl f(x) P n (x) nazýváme chybou interpolace Jestliže existuje konstanta M n+1 taková, že f (n+1) (x) Mn+1 x a, b, pak lze chybu odhadnout E(x) ω n+1(x)m n+1. (n+1)! Tento odhad závisí jak na vlastnostech funkce f(x) (což je schováno v M n+1 ), tak také na bodech interpolace samotných. Nabízí se tedy otázka, jak zvolit uzly tak, aby maximální hodnota chyby byla co nejmenší. Maximální hodnota chyby interpolace je minimální v případě, že za uzly interpolace volíme kořeny jistých polynomů. Úmluva: Symbolem Π n budeme značit třídu všech normovaných polynomů stupně n, tj. polynomy tvaru: P n (x) = x n + a 1 x n a n 1 x + a n. Definice 1: Řekneme, že polynom Q n (x) Π n má na intervalu 1, 1 nejmenší odchylku od nuly mezi všemi polynomy z Π n, jestliže max x 1,1 Q n (x) < max x 1,1 S n (x) S n (x) Π n a S n (x) je identicky různé od Q n (x). Věta 4: Funkce T m (x) = cos(m arccos x), x 1, 1 je polynom m-tého stupně. Pro m N je koeficient polynomu T m (x) u x m roven 2 m 1. 22
24 Vlastnosti polynomů T m (x) 1) z rekurentního vztahu T 0 (x) = 1, T 1 (x) = x, T m+1 (x) = 2xT m (x) T m 1 (x) m N plyne: T 2 (x) = 2xT 1 (x) T 0 (x) = 2x 2 1 T 3 (x) = 2xT 2 (x) T 1 (x) = 2x(2x 2 1) x = 4x 3 3x T 4 (x) = 8x 4 8x ) polynom T m (x) má m reálných různých kořenů x k, které leží v intervalu ( 1, 1), neboť pro ně platí T m (x k ) = 0, k = 0, 1,..., m 1 právě tehdy, když x k = cos ( ) 2k+1 π m 2 ; cos(m arccos xk ) = 0 3) dále víme, že max 1 x 1 T m (x) = 1. Věta 5: Této maximální hodnoty nabývá polynom T m (x) se střídavými znaménky v m bodech intervalu 1, 1 neboť x k = cos k m π; cos(m arccos x k) = 1. Polynom T m (x) = 2 1 m T m (x) nabývá na intervalu 1, 1 nejmenší odchylku od nuly mezi všemi polynomy z Π m. Definice 2: Polynomy T m (x) se nazývají Čebyševovy polynomy. Jestliže při interpolaci na 1, 1 zvolíme za uzly interpolace kořeny Čebyševova polynomu T n+1 (x), pak ω n+1 (x) = 2 n T n+1 (x) a pro odhad chyby platí E(x) M n+1 1 (n + 1)! 2, n protože ω n+1 (x) = 2 n T n+1 (x) = 2 n T n+1 (x) = 2 n. Při interpolaci na obecném intervalu a, b lze použít lineární transformaci, kde x = 1((b a)z + a + b), z 1, 1 a pro uzly interpolace platí x 2 k = 1 ((b a)z 2 k +a+b), kde z k jsou kořeny Čebyševových polynomů na intervalu 1, 1. ) Pro chybu interpolace pak platí E(x) = f(x) P n (x) M n+1 1 n+1, po úpravě E(x) M n+1 (b a) n+1. (n+1)! 2 2n+1 ( b a (x+1)! 2 n 2 23
25 Interpolace na ekvidistantních uzlech Předpokládejme, že uzly interpolace jsou ekvidistantní, tj. x i = x 0 + ih, i = 0, 1,..., n, h R, h > 0. Nejprve zavedeme proměnnou q vztahem q = x x 0, h kde q je relativní vzdálenost bodu x od bodu x 0. Je-li x = x i pro nějaké i (tj. x je uzel interpolace), pak q = x 0+ih x 0 = i. Libovolný bod x x h i lze psát x = x 0 + qh. Lagrangeův interpolační polynom: Langrangeův interpolační polynom je ve tvaru P n (x) = n i=0 l i(x)f i. Přitom l i (x) = n j=0,j i n j=0,j i x x j x i x j l i (x 0 + qh) = x 0 + qh x 0 jh x 0 + ih x 0 jh = n j=0,j i n j=0,j i x 0 + qh x j x i x j = q j i j = L(i) n (q). Pak Lagrangeův interpolační polynom P n (x 0 + qh) = n i=0 L(i) n (q)f i. Pro chybu interpolace pak platí E(x 0 + qh) = f (n+1) (ξ) (x+1)! ω n+1 (x 0 + qh) = f (n+1) (ξ) (x+1)! (x 0 + qh x 0 )(x 0 + qh x 0 h)(x 0 + qh x 0 2h)... (x 0 + qh x 0 nh) = f (n+1) (ξ) h n+1 q(q 1)(q (n+1)! 2)... (q n) = f (n+1) (ξ) h n+1 n (n+1)! j=0 (q j) Příklad 1: Nalezněte Lagrangeův interpolační polynom pro data: i x i f i
26 l i (x) = (x x 0 )(x x 1 )... (x x i 1 )(x x i+1 )... (x x n ) (x i x 0 )(x i x 1 )... (x i x i 1 )(x i x i+1 )... (x i x n ) x(x 1) x(x 1) = = (1)(2) 2 (x + 1)(x 1) = = x2 1 l 0 (x) = (x x 1)(x x 2 ) (x 0 x 1 )(x 0 x 2 ) l 1 (x) = (x x 0)(x x 2 ) (x 1 x 0 )(x 1 x 2 ) l 2 (x) = (x x 0)(x x 1 ) (x 2 x 0 )(x 2 x 1 ) n P n (x) = l i (x)f(x i ) i=0 (1)( 1) = (x + 1)x (2)(1) P 2 (x) = f(x 0 )l 0 (x) + f(x 1 )l 1 (x) + f(x 2 )l 2 (x) P 2 (x) = x(x 1) 1 + 4( x 2 x(x + 1) + 1) = x(x + 1) 2 1 = x = 1 2 (x2 x) + 4 4x (x2 + x) = 1 2 x2 1 2 x + 4 4x x x = 1 2 x2 4x x2 1 2 x + 9 ( 1 2 x + 4 = x ) ( + x ) + 4 = 2 ( ) ( ) = x 2 + x + 4 = x 2 + 4x Newtonův interpolační polynom: P n (x) = f 0 + (x x 0 )f[x 0, x 1 ] + (x x 0 )(x x 1 )f[x 0, x 1, x 2 ] + + (x x 0 )... (x x n 1 )f[x 0, x 1,..., x n ]. Nechť uzly x i, i = 0, 1,..., n jsou ekvidistantní, tj. x i = x 0 + ih, h R, h > 0. Pak Newtonův interpolační polynom lze psát ve tvaru P n (x 0 + qh) = f 0 + n j=0 j f 0 q(q 1)... (q j + 1) j! a nazýváme jej Newtonův interpolační polynom pro interpolaci vpřed. Zavedeme-li novou proměnnou s: x = x n + sh, s R : s = x xn, kde s je h relativní vzdálenost bodu x od bodu x n. Pak Newtonův interpolační polynom lze psát ve tvaru: n j f n P n (x n + sh) = f n + s(s + 1)... (s + j 1) j! j=1 a nazýváme jej Newtonův interpolační polynom pro interpolaci vzad. 25
27 Příklad 2: Nalezněte Newtonův interpolační polynom pro data i x i f(x i ) f[x i, x i+1 ] f[x i, x i+1, x i+2 ] f[x 0, x 1 ] = f[x 0, x 1, x 2 ] = 2 = 1 2 f[x 1, x 2 ] = 5 = f[x i, x j ] = f(x i) f(x j ) x i x j i j f[x 0,..., x k ] = f[x 1,..., x k ] f[x 0,..., x k 1 ] k = 1, 2,..., n x k x 0 P n (x) = f(x 0 ) + (x x 0 )f[x 0, x 1 ] + (x x 0 )(x x 1 )f[x 0, x 1, x 2 ] (x x 0 )... (x x n 1 )f[x 0, x 1,..., x n ] P 2 (x) = 1 + (x + 1)3 + (x + 1)x = 1 + 3x x 2 + x = x 2 + 4x + 4 Iterovaná interpolace Úlohu najít interpolační polynom n-tého stupně neřešíme jako celek, ale postupujeme tzv. iterovaně, tj. postupně přidáváme uzly, čímž zvyšujeme stupeň interpolačního polynomu. Také můžeme iterované interpolace využít, když nás zajímá hodnota interpolačního polynomu v některém bodě různém od uzlů interpolace samotných, aniž bychom samotný polynom hledali. Lemma 1: Platí P ij (x) = f ij. P i0...i k (x) = 1 x ik x i0 P i 1...i k (x) P i0...i k 1 (x) x x ik x x i0 k = 0, 1,..., n 26
28 Tomuto postupu říkáme iterovaná interpolace, přičemž platí: P i0,i 1,...,i k (x ij ) = f ij a P i0 i 1,...,i k (x) Π k. Celý algoritmus zapisujeme do tabulky: x i f i P i (x) P i,i+1 (x) P i,i+1,i+2 (x) x 0 f 0 P 0 (x) P 01 (x) x 1 f 1 P 1 (x) P 012 (x) P 12 (x) x 2 f 2 P 2 (x) P 123 (x) P 23 (x) x 3 f 3 P 3 (x). Pro takto uspořádaný výpočet používáme termín Nevillův algoritmus (Nevillovo schéma). Příklad 3: Najděte interpolační polynom pro data i x i P i (x) P i0...i k (x) = P 01 (x) = P 12 (x) = 1 x ik x i0 P i 1...i k (x) x x ik P i0...i k 1 (x) x x i0 1 x 1 x 0 P 1(x) x x 1 P 0 (x) x x 0 = x 2 3 x = 39x 2 ( 3x + 6) = 18x x 2 x 1 P 2(x) x x 2 P 1 (x) x x 1 = x 3 39 x 2 = 105(x 2) + +39(x 3) = 66x
29 P 23 (x) = P 34 (x) = P 012 (x) = P 123 (x) = P 234 (x) = P 0123 (x) = P 1234 (x) = P (x) = 1 x 3 x 2 P 3(x) x x 3 P 2 (x) x x 2 = x 5 243(x 3) 105 x 3 = (x 5) + = 69x x 4 x 3 P 4(x) x x 4 P 3 (x) x x 3 = x 7 11(x 5) 243 x 5 = (x 7) + = 127x x 2 x 0 P 12(x) x x 2 P 01 (x) x x 0 = 1 66x + 93 x x 3 x = 66x2 + 93x + 3 (18x + 3)(x 3) + = 16x x x 3 x 1 P 23(x) x x 3 P 12 (x) x x 1 = 1 69x x 5 ( 69x + 102)(x 2) 3 66x + 93 x 2 = + 3 (66x + 93)(x 5) + = x 2 61x x 4 x 2 P 34(x) x x 4 P 23 (x) x x 2 = 1 127x 878 x 7 (127x 878)(x 3) 4 69x x 3 = + 4 (69x 102)(x 7) + = 49x 2 461x x 3 x 0 P 123(x) x x 3 P 012 (x) x x 0 = 1 5 x2 61x + 87 x 5 16x x 3 x = ( x 3 61x x + (16x 2 14x + 3)(x 5) = 3x 3 31x x x 4 x 1 P 234(x) x x 4 P 123 (x) x x 1 = x2 461x x 7 x 2 61x + 87 x 2 = (49x 2 461x + 837)(x 2) + (x x 87)(x 7) = 5 10x 3 101x x x 4 x 0 P 1234(x) x x 4 P 0123 (x) x x 0 = x3 101x x 213 x 7 3x 3 31x x 3 x = 10x 4 101x x 2 213x (3x 3 31x x 3)(x 7) = 7 x 4 7x 3 + 2x 3 28
30 Příklad 4: Vypočítejte přibližnou hodnotu f(1) užitím Nevillova algoritmu, je-li dáno: i x i f i i x i f i = P i (1) P i,i+1 (1) P i,i+1,i+2 (1) P i,i+1,i+2,i+3 (1) P 0,1,2,3,4 (1) P 01 (1) = P 12 (1) = P 23 (1) = P 34 (1) = P 012 (1) = P 123 (1) = P 234 (1) = P 0123 (1) = P 1234 (1) = P (1) = 1 x 1 x 0 P 1(1) 1 x 1 P 0 (1) 1 x 0 = 1 2 ( 3) 23 1 ( 2) 21 1 ( 3) = 29 1 x 2 x 1 P 2(1) 1 x 2 P 1 (1) 1 x 1 = 1 1 ( 2) 9 1 ( 1) 23 1 ( 2) = 19 1 x 3 x 2 P 3(1) 1 x 3 P 2 (1) 1 x 2 = 1 0 ( 1) ( 1) = 3 1 x 4 x 3 P 4(1) 1 x 4 P 3 (1) 1 x 3 = = 3 1 x 2 x 0 P 12(1) 1 x 2 P 01 (1) 1 x 0 = 1 1 ( 3) 19 1 ( 1) 29 1 ( 3) = 67 1 x 3 x 1 P 23(1) 1 x 3 P 12 (1) 1 x 1 = 1 0 ( 2) ( 2) = 5 1 x 4 x 2 P 34(1) 1 x 4 P 23 (1) 1 x 2 = 1 2 ( 1) ( 1) = 3 1 x 3 x 1 P 123(1) 1 x 3 P 012 (1) 1 x 0 = 1 0 ( 3) ( 3) = 29 1 x 4 x 1 P 234(1) 1 x 4 P 123 (1) 1 x 1 = 1 2 ( 2) ( 2) = 1 1 x 4 x 0 P 1234(1) 1 x 4 P 0123 (1) 1 x 0 = 1 2 ( 3) ( 3) = 5 29
31 Z lemmatu 1 lze odvodit tzv. Aitkenův algoritmus, který při výpočtu používá jiných permutací indexů. Tabulka je následující: x i f i P i (x) P 0i (x) P 01i (x) P 012i (x) x 0 f 0 P 0 (x) P 01 (x) x 1 f 1 P 1 (x) P 012 (x) P 02 (x) P 0123 (x) x 2 f 2 P 2 (x) P 013 (x) P 03 (x) x 3 f 3 P 3 (x) Při výpočtu třetího sloupce tabulky P i (x) volíme za index i hodnoty 0, 1,... n. V dalším sloupci P 0i (x) již je za první číslo indexu pevně zvolena 0 a poté následuje proměnná i, za kterou volíme hodnoty 1, 2,..., n. U následujícího sloupce P 01i (x) se proměnná posouvá na třetí pozici a volíme za ni hodnoty 2, 3,..., n, přičemž první dvě čísla indexu tvoří stále 01. Takto postupně i posouváme o pozici dál a volíme za něj hodnoty 0, 1,... n, které ale nejsou na pevných místech indexu, dokud nedojdeme k pevnému indexu 0, 1,..., n. Při počítání hodnot P (x) můžeme místa indexů zaměňovat tak, abychom v průběhu výpočtu mohli využít již známých hodnot. Tedy např. P 013 (x) = P 103 (x) = 1 P 03 (x) x x 3 x 3 x 1 P 10 (x) x x 1 P 10 (x) = P 01 (x) Příklad 5: Pomocí Aitkenova algoritmu najdi interpolační polynom pro data i x i f i P i (x) P 0i (x) P 01i (x) P 0 (x) = 1 P 01 (x) = 3x P 1 (x) = 14 P 012 (x) = x 2 + 4x + 4 P 02 (x) = 5x P 2 (x) = 16 30
32 P i0...i k (x) = P 01 (x) = P 02 (x) = 1 x ik x i0 P i 1...i k (x) x x ik P i0...i k 1 (x) x x i0 1 x 1 x 0 P 1(x) x x 1 P 0 (x) x x 0 = (+1) 4 x 0 1 x + (+1) = x 1 x + 1 = 4(x + 1) x = 4x + 4 x = 3x + 4 = P 10 (x) 1 x 2 x 0 P 2(x) x x 2 P 0 (x) x x 0 = (+1) 16 x 2 1 x + 1 = 1 [16(x + 1) 3 (x 2)] = 1 3 [16x + 16 x + 2] = 1 [15x + 18] = 5x P 012 (x) = 1 P 102 (x) = x 2 x 1 P 02(x) x x 2 P 10 (x) x x 1 = x + 6 x 2 3x + 4 x [x(5x + 6) (3x + 4)(x 2)] = 1 2 [5x2 + 6x (3x 2 2x 8)] = 1 2 [5x2 + 6x 3x 2 + 2x + 8] = 1 2 [2x2 + 8x + 8] = x 2 + 4x + 4 Příklad 6: Vypočítejte přibližnou hodnotu f(1) užitím Aitkenova algoritmu, je-li dáno: i x i f i i x i f i = P i (1) P 0,i (1) P 0,1,i (1) P 0,1,2,i (1) P 0,1,2,3,4 (1)
33 1 P 10 (1) = P 01 (1) = x 1 x 0 P 1(1) 1 x 1 P 0 (1) 1 x 0 = 1 2 ( 3) 23 1 ( 2) 21 1 ( 3) = 29 1 P 02 (1) = x 2 x 0 P 2(1) 1 x 2 P 0 (1) 1 x 0 = 1 1 ( 3) 9 1 ( 1) 21 1 ( 3) = 3 1 P 03 (1) = x 3 x 0 P 3(1) 1 x 3 P 0 (1) 1 x 0 = 1 0 ( 3) ( 3) = 3 1 P 04 (1) = x 4 x 0 P 4(1) 1 x 4 P 0 (1) 1 x 0 = 1 1 ( 4) ( 3) = 3 1 P 210 (1) = P 012 (1) = P 012 (1) = x 2 x 1 P 02(1) 1 x 2 P 10 (1) 1 x 1 = 1 1 ( 2) 3 1 ( 1) 29 1 ( 2) = 67 1 P 013 (1) = P 103 (1) = x 3 x 1 P 03(1) 1 x 3 P 10 (1) 1 x 1 = 1 0 ( 2) ( 2) = 19 1 P 014 (1) = P 104 (1) = x 4 x 1 P 04(1) 1 x 4 P 10 (1) 1 x 1 = 1 2 ( 2) ( 2) = 5 1 P 0123 (1) = P 3120 (1) = P 2103 (1) = x 3 x 2 P 103(1) 1 x 3 P 210 (1) 1 x 2 = 1 0 ( 1) ( 1) = 29 1 P 0124 (1) = P 1204 (1) = P 2104 (1) = x 4 x 2 P 104(1) 1 x 4 P 210 (1) 1 x 2 = 1 2 ( 1) ( 1) = 19 1 P (1) = P (1) = x 4 x 3 P 1204(1) 1 x 4 P 3120 (1) 1 x 3 = = 5 Hermitovská interpolace Interpolovat lze také hodnoty derivací, viz. tzv. Hermitův interpolační problém: Jsou dány body x 0,..., x m : x i x k pro i k a hodnoty f (k) i i = 0, 1,..., m, k = 0, 1,..., n i 1. Nechť n + 1 = m i=0 n i. Hledáme polynom stupně n ve tvaru: P n (x) Π n : P n (k) (x i ) = f (k) i i = 0,..., m, k = 0,..., n i 1. 32
34 Toto je obecná úloha Hermitovské interpolace. I v tomto případě lze k nalezení interpolačního polynomu použít metodu neurčitých koeficientů. Jde jen o to, správně určit stupeň hledaného polynomu. Věta 6: Pro dané body x 0,..., x m : x i x k pro i k a pro dané hodnoty f (k) i i = 0,..., m k = 0,..., n i 1 existuje právě jeden polynom P n (x) Π n takový, že P n (k) (x i ) = f (k) i pro i = 0,..., m, k = 0,..., n i 1 přičemž n = m i=0 n i 1. Hovoříme o tzv. Hermitově interpolačním polynomu. Věta 7: Nechť jsou dány body x 1,..., x m a, b, x i x k pro i k, nechť f(x) C n+1 a, b. Dále nechť P n (x) je Hermitův interpolační polynom, tj. P n (x) Π n : P n (k) (x i ) = f (k) (x i ) i = 0,..., m, k = 0,..., n i 1, n = m i=0 n i 1. Pak x a, b ξ (a, b) : E( x) = f( x) P n ( x) = f (n+1) (ξ)ω n+1 ( x) (n + 1)!, kde ω n+1 (x) = (x x 0 ) n 0 (x x 1 ) n 1...(x x m ) nm. Zajímavý je případ, kdy i je n i = 2. Pak se dá odvodit vzorec k nalezení Hermitova interpolačního polynomu. Věta 8: Nechť jsou dány uzly x 0,..., x m, x i x k pro i k a funkční hodnoty f i a hodnoty 1. derivace f i i = 0,..., m. Dále nechť P 2m+1 (x) Π 2m+1 je Hermitův interpolační polynom, pro který platí P 2m+1 (x i ) = f i i = 0,..., m, P 2m+1(x i ) = f i i = 0,..., m. Pak tento polynom lze vyjádřit ve tvaru P 2m+1 (x) = m h i (x)f i + i=0 m h i (x)f i, i=0 kde h i (x) = [1 2(x x i )l i(x i )]l 2 i (x), h i (x) = (x x i )l 2 i (x) a l i (x) jsou fundamentální polynomy z Lagrangeova interpolačního polynomu. Poznámka 5: V obecném Hermitově interpolačním problému lze také výhodně použít Lagrangeova interpolačního polynomu: Hermitův interpolační polynom lze psát ve 33
35 tvaru P n (x) = P m (x)+ω m+1 (x)h n m 1 (x) pro data x i, i = 0, 1,..., m f (k) i, k = 0, 1,..., n i 1 i = 0,..., m, kde P m (x) je Lagrangeův interpolační polynom pro data (x i, f (0) i (n m) podmínek. P (k) n Příklad 7: ) i = 0, 1,..., m. Polynom H n m 1 (x) určíme ze zbývajících (x i ) = f (k) i, i = 0,..., m, k = 1,..., n i 1. Najděte Hermitův interpolační polynom, jsou-li dána data: i x i f(x i ) f (x i ) P n (x) = m h i (x)f(x i ) + i=0 m h i (x)f (x i ) n = 2m + 1 i=0 h i (x) = [1 2(x x i )l i(x i )]l 2 i (x) h i (x) = (x x i )li 2 (x) 1 P 3 (x) = h i (x)f(x i ) + i=0 1 h i (x)f (x i ) i=0 l 0 (x) = (x x 1) (x 0 x 1 ) = x 1 2 = 1 2 (x 1) l 0(x) = 1 2 l 1 (x) = (x x 0) (x 1 x 0 ) = x + 1 = (x + 1) l 1(x) = 1 2 [ ( )] 1 1 h 0 (x) = 1 + 2(x + 1) h 1 (x) = [ 1 2(x 1) 2 ( 1 2 h 0 (x) = (x + 1) 1 (x 1)2 4 h 1 (x) = (x 1) 1 (x + 1)2 4 4 (x 1)2 = (1 + x + 1) 1 4 (x 1)2 = (x + 2) 1 (x 1)2 4 )] 1 4 (x + 1)2 = (1 x + 1) 1 4 (x + 1)2 = (2 x) 1 (x + 1)2 4 h 0 (x)f(x 0 ) = (x + 2) 1 4 (x 1)2 1 = 1 4 (x + 1)(x2 2x + 1) = 1 4 (x3 3x + 2) h 1 (x)f(x 1 ) = (2 x) 1 4 (x + 1)2 9 = 9 4 (2 x)(x2 + 2x + 1) = 9 4 ( x3 + 3x + 2) h 0 (x)f (x 0 ) = (x + 1) 1 4 (x 1)2 0 = 0 34
36 h 1 (x)f (x 1 ) = (x 1) 1 4 (x + 1)2 12 = 3(x 1)(x 2 + 2x + 1) = 3(x 3 + x 2 x 1) P 3 (x) = 1 4 x3 3 4 x x x x3 + 3x 2 3x 3 = ( 1 x ) ( x 2 + x ) ( ) 2 3 = Příklad 8: x 3 + 3x x = x3 + 3x 2 + 3x + 2 Najděte Hermitův interpolační polynom, jsou-li dána data: i x i f i (x) f i(x) f i (x) m = 2, n = m n i 1 = = 5, i=0 P 5 (x) = P 2 (x) + ω 3 (x)h 2 (x) P m (x) = m l i (x)f i i=0 P 2 (x) = (x x 1)(x x 2 ) (x 0 x 1 )(x 0 x 2 ) f 0 + (x x 0)(x x 2 ) (x 1 x 0 )(x 1 x 2 ) f 1 + (x x 0)(x x 1 ) (x 2 x 0 )(x 2 x 1 ) f 2 (x 1)(x 3) P 2 (x) = + x(x 1) 172 = (x2 4x x 2 86x) = 29x 2 30x + 1 P 2(x) = 58x 30, P 2 (x) = 58 m ω m+1 = (x x i ) i=0 ω 3 (x) = x(x 1)(x 3) = x 3 4x 2 + 3x, ω 3(x) = 3x 2 8x + 3, ω 3(x) = 6x 8 H 2 (x) = ax 2 + bx + c, H 2(x) = 2ax + b, H 2 (x) = 2a P n(x) = P m(x) + ω m+1(x)h n m 1 (x) + ω m+1 (x)h n m 1(x) P 5(x) = 58x 30 + (3x 2 8x + 3)(ax 2 + bx + c) + (x 3 4x 2 + 3x)(2ax + b) P n (x) = P m(x) + ω m+1(x)h n m 1 (x) + 2ω m+1(x)h n m 1(x) + ω m+1 (x)h P n m 1(x) 5 (x) = 58 + (6x 8)(ax 2 + bx + c) + 2(3x 2 8x + 3)(2ax + b) + (x 3 4x 2 + 3x)2a 35
37 P 5(0) = c = 3 c = 9 P 5(1) = 28 + ( 2)(a + b + c) = 2 a + b + 9 = 13 a = 4 b P 5 (0) = 58 + ( 8)c + 6b = 4 b = 3 a = 1 P 5 (x) = 29x 2 30x (x 3 4x 2 + 3x)(x 2 + 3x + 9) = x 5 x 4 + 2x 2 3x + 1 Interpolace v R 2 Interpolovat lze funkce na pravoúhlé oblasti, ale i na obecnějších oblastech. Interpolace polynomy na pravoúhlé síti Uvažujme oblast D R 2, tj. D = {[x, y] R 2 a x b, c y d}. V intervalu a, b sestrojíme uzly x i tj. a = x 0 < x 1 <... < x n = b a v intervalu c, d sestrojíme uzly y j tj. c = y 0 < y 1 <... < y m = d. Tedy máme uzly [x i, y j ] i = 0,..., n, j = 0,..., m a nechť jsou dány hodnoty nějaké funkce f(x, y) v těchto bodech. Tj. f(x i, y j ) = f ij i, j. Hledáme polynom P (x, y) : P (x i, y j ) = f ij i = 0, 1,..., n j = 0, 1,..., m, který je stupně m v proměnné x a stupně n v proměnné y. Postup je takový, že nejprve interpolujeme na přímkách y j hodnoty f ij v uzlech x i, tj. sestrojíme P (x, y j ) = n i=0 l i(x)f ij j = 0, 1,..., m. Potom interpolujeme na přímkách x i hodnoty P (x, y j ), tj. sestrojíme P (x, y) = m j=0 l j(y)p (x, y j ). Tedy celkem lze hledaný polynom P (x, y) psát ve tvaru: P (x, y) = m n l j (y) l i (x)f ij = j=0 i=0 n m l ij (x, y)f ij, i=0 j=0 kde l ij (x, y) = l i (x)l j (y). 36
38
39
40
41
42
43
44
45
46
47
48
49


50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
Interpolace, ortogonální polynomy, Gaussova kvadratura
 Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Aproximace funkcí. x je systém m 1 jednoduchých, LN a dostatečně hladkých funkcí. x c m. g 1. g m. a 1. x a 2. x 2 a k. x k b 1. x b 2.
 Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Aproximace funkcí Aproximace je výpočet funkčních hodnot funkce z nějaké třídy funkcí, která je v určitém smyslu nejbližší funkci nebo datům, která chceme aproximovat. Třída funkcí, ze které volíme aproximace
Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení
 Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení Polynom nad R = zobrazení f : R R f(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, kde a i R jsou pevně daná
Polynomy a interpolace text neobsahuje přesné matematické definice, pouze jejich vysvětlení Polynom nad R = zobrazení f : R R f(x) = a n x n + a n 1 x n 1 +... + a 1 x + a 0, kde a i R jsou pevně daná
Aproximace funkcí. Numerické metody 6. května FJFI ČVUT v Praze
 Aproximace funkcí Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Dělení Interpolace 1D Více dimenzí Minimalizace Důvody 1 Dělení Dělení - Získané data zadané data 2 Dělení - Získané data Obecně
Aproximace funkcí Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Dělení Interpolace 1D Více dimenzí Minimalizace Důvody 1 Dělení Dělení - Získané data zadané data 2 Dělení - Získané data Obecně
Čebyševovy aproximace
 Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Čebyševovy aproximace Čebyševova aproximace je tzv hledání nejlepší stejnoměrné aproximace funkce v daném intervalu Hledáme funkci h x, která v intervalu a,b minimalizuje maximální absolutní hodnotu rozdílu
Aproximace funkcí. Polynom Φ m (x) = c 0 + c 1 x + c 2 x c m x m. Φ m (x) = c 0 g 0 (x) + c 1 g 1 (x) + c 2 g 2 (x) +...
 = c 0 + c 1 x + c 2 x c m x m. Φ m (x) = c 0 g 0 (x) + c 1 g 1 (x) + c 2 g 2 (x) +...") Aproximace funkcí 1 Úvod Aproximace funkce - výpočet funkčních hodnot nejbližší (v nějakém smyslu) funkce v určité třídě funkcí (funkce s nějakými neznámými parametry) Příklady funkcí používaných pro aproximaci
Aproximace funkcí 1 Úvod Aproximace funkce - výpočet funkčních hodnot nejbližší (v nějakém smyslu) funkce v určité třídě funkcí (funkce s nějakými neznámými parametry) Příklady funkcí používaných pro aproximaci
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 21 Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 2 / 21 Řešíme následující úlohu: differencovatelnou funkci f : R R známe jen v konečném počtu bodů x 0,
1 / 21 Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague 2 / 21 Řešíme následující úlohu: differencovatelnou funkci f : R R známe jen v konečném počtu bodů x 0,
Interpolace Lagrangeovy polynomy. 29. října 2012
 Interpolace Lagrangeovy polynomy Michal Čihák 29. října 2012 Problematika interpolace V praxi máme často k dispozici údaje z různých měření tzv. data. Data mohou mít například podobu n uspořádaných dvojic
Interpolace Lagrangeovy polynomy Michal Čihák 29. října 2012 Problematika interpolace V praxi máme často k dispozici údaje z různých měření tzv. data. Data mohou mít například podobu n uspořádaných dvojic
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Interpolace pomocí splajnu
 Interpolace pomocí splajnu Interpolace pomocí splajnu Připomenutí U interpolace požadujeme, aby graf aproximující funkce procházel všemi uzlovými body. Interpolační polynom aproximující funkce je polynom
Interpolace pomocí splajnu Interpolace pomocí splajnu Připomenutí U interpolace požadujeme, aby graf aproximující funkce procházel všemi uzlovými body. Interpolační polynom aproximující funkce je polynom
úloh pro ODR jednokrokové metody
 Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Numerické metody pro řešení počátečních úloh pro ODR jednokrokové metody Formulace: Hledáme řešení y = y() rovnice () s počáteční podmínkou () y () = f(, y()) () y( ) = y. () Smysl: Analyticky lze spočítat
Řešení nelineárních rovnic
 Řešení nelineárních rovnic Metody sečen (sekantová a regula falsi) Máme dva body x 1 a x mezi nimiž se nachází kořen Nový bod x 3 volíme v průsečíku spojnice bodů x 1, f x 1 a x, f x (sečny) s osou x ERRBISPAS
Řešení nelineárních rovnic Metody sečen (sekantová a regula falsi) Máme dva body x 1 a x mezi nimiž se nachází kořen Nový bod x 3 volíme v průsečíku spojnice bodů x 1, f x 1 a x, f x (sečny) s osou x ERRBISPAS
Hledání extrémů funkcí
 Hledání extrémů funkcí Budeme se zabývat téměř výhradně hledáním minima. Přes nost nalezeného extrému Obecně není hledání extrému tak přesné jako řešení rovnic. Demonstrovat to můžeme na příkladu hledání
Hledání extrémů funkcí Budeme se zabývat téměř výhradně hledáním minima. Přes nost nalezeného extrému Obecně není hledání extrému tak přesné jako řešení rovnic. Demonstrovat to můžeme na příkladu hledání
Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice. sin x + x 2 2 = 0.
 A 9 vzorové řešení Př. 1. Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice Počítejte v radiánech, ne ve stupních! sin x + x 2 2 = 0. Rovnici lze upravit na sin
A 9 vzorové řešení Př. 1. Libovolnou z probraných metod najděte s přesností na 3 desetinná místa kladný kořen rovnice Počítejte v radiánech, ne ve stupních! sin x + x 2 2 = 0. Rovnici lze upravit na sin
5. Interpolace a aproximace funkcí
 5. Interpolace a aproximace funkcí Průvodce studiem Často je potřeba složitou funkci f nahradit funkcí jednodušší. V této kapitole budeme předpokládat, že u funkce f známe její funkční hodnoty f i = f(x
5. Interpolace a aproximace funkcí Průvodce studiem Často je potřeba složitou funkci f nahradit funkcí jednodušší. V této kapitole budeme předpokládat, že u funkce f známe její funkční hodnoty f i = f(x
14. přednáška. Přímka
 14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
14 přednáška Přímka Začneme vyjádřením přímky v prostoru Přímku v prostoru můžeme vyjádřit jen parametricky protože obecná rovnice přímky v prostoru neexistuje Přímka v prostoru je určena bodem A= [ a1
Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague
 1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
1 / 40 regula Faculty of Nuclear Sciences and Physical Engineering Czech Technical University in Prague regula 1 2 3 4 5 regula 6 7 8 2 / 40 2 / 40 regula Iterační pro nelineární e Bud f reálná funkce
Pseudospektrální metody
 Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
Pseudospektrální metody Obecně: založeny na rozvoji do bázových funkcí s globálním nosičem řešení diferenciální rovnice aproximuje sumou kde jsou např. Čebyševovy polynomy nebo trigonometrické funkce tyto
Integrace. Numerické metody 7. května FJFI ČVUT v Praze
 Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
I. 7. Diferenciál funkce a Taylorova věta
 I. 7. Diferenciál funkce a Taylorova věta 343 I. 7. Diferenciál funkce a Taylorova věta Věta 26. Funkce f má v bodě x 0 diferenciál (je diferencovatelná v x 0 ) právě tehdy, když existuje vlastní derivace
I. 7. Diferenciál funkce a Taylorova věta 343 I. 7. Diferenciál funkce a Taylorova věta Věta 26. Funkce f má v bodě x 0 diferenciál (je diferencovatelná v x 0 ) právě tehdy, když existuje vlastní derivace
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Kombinatorická minimalizace
 Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
Kombinatorická minimalizace Cílem je nalézt globální minimum ve velké diskrétní množině, kde může být mnoho lokálních minim. Úloha obchodního cestujícího Cílem je najít nejkratší cestu, která spojuje všechny
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
INTERPOLAČNÍ POLYNOM. F (x)... hledaná funkce (polynom nebo funkce vytvořená z polynomů), pro kterou platí
... hledaná funkce (polynom nebo funkce vytvořená z polynomů), pro kterou platí") 8 Řešení Lagrangeovy a Hermiteovy úlohy interpolace Kateřina Konečná/1 INTERPOLAČNÍ POLYNOM aproximace zadaných hodnot nebo hledané funkce f funkcí F (x) (polynomem) F musí být k f co nejblíže značení:
8 Řešení Lagrangeovy a Hermiteovy úlohy interpolace Kateřina Konečná/1 INTERPOLAČNÍ POLYNOM aproximace zadaných hodnot nebo hledané funkce f funkcí F (x) (polynomem) F musí být k f co nejblíže značení:
pouze u některých typů rovnic a v tomto textu se jím nebudeme až na
 Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Numerické metody a statistika
 Numerické metody a statistika Radek Kučera VŠB-TU Ostrava 016-017 ( ) Numerické metody a statistika 016-017 1 / Numerické integrování ( ) Numerické metody a statistika 016-017 / Geometrický význam integrálu
Numerické metody a statistika Radek Kučera VŠB-TU Ostrava 016-017 ( ) Numerické metody a statistika 016-017 1 / Numerické integrování ( ) Numerické metody a statistika 016-017 / Geometrický význam integrálu
Diferenciál a Taylorův polynom
 Diferenciál a Taylorův polynom Základy vyšší matematiky lesnictví LDF MENDELU c Simona Fišnarová (MENDELU) Diferenciál a Taylorův polynom ZVMT lesnictví 1 / 11 Aproximace funkce v okoĺı bodu Danou funkci
Diferenciál a Taylorův polynom Základy vyšší matematiky lesnictví LDF MENDELU c Simona Fišnarová (MENDELU) Diferenciál a Taylorův polynom ZVMT lesnictví 1 / 11 Aproximace funkce v okoĺı bodu Danou funkci
Numerická matematika 1
 Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Numerická matematika 1 Obsah 1 Řešení nelineárních rovnic 3 1.1 Metoda půlení intervalu....................... 3 1.2 Metoda jednoduché iterace..................... 4 1.3 Newtonova metoda..........................
Aplikovaná matematika I
 Metoda nejmenších čtverců Aplikovaná matematika I Dana Říhová Mendelu Brno c Dana Říhová (Mendelu Brno) Metoda nejmenších čtverců 1 / 8 Obsah 1 Formulace problému 2 Princip metody nejmenších čtverců 3
Metoda nejmenších čtverců Aplikovaná matematika I Dana Říhová Mendelu Brno c Dana Říhová (Mendelu Brno) Metoda nejmenších čtverců 1 / 8 Obsah 1 Formulace problému 2 Princip metody nejmenších čtverců 3
LDF MENDELU. Simona Fišnarová (MENDELU) LDR druhého řádu VMAT, IMT 1 / 22
 LDR druhého řádu VMAT, IMT 1 / 22") Lineární diferenciální rovnice druhého řádu Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Lineární diferenciální rovnice druhého řádu Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
18 Fourierovy řady Úvod, základní pojmy
 M. Rokyta, MFF UK: Aplikovaná matematika III kap. 18: Fourierovy řady 7 18 Fourierovy řady 18.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
M. Rokyta, MFF UK: Aplikovaná matematika III kap. 18: Fourierovy řady 7 18 Fourierovy řady 18.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika (CŽV Kadaň) aneb Úvod do lineární algebry Matice a soustavy rovnic
 aneb Úvod do lineární algebry Matice a soustavy rovnic") Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
INTERPOLAČNÍ POLYNOM.... hledaná funkce (polynom nebo funkce vytvořená z polynomů), pro kterou platí
, pro kterou platí") 8 Řešení Lagrangeovy a Hermiteovy úlohy interpolace 1 INTERPOLAČNÍ POLYNOM aproximace zadaných hodnot nebo hledané funkce f funkcí F (x) (polynomem) F musí být k f co nejblíže značení: P (n) množina všech
8 Řešení Lagrangeovy a Hermiteovy úlohy interpolace 1 INTERPOLAČNÍ POLYNOM aproximace zadaných hodnot nebo hledané funkce f funkcí F (x) (polynomem) F musí být k f co nejblíže značení: P (n) množina všech
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
5.3. Implicitní funkce a její derivace
 Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Výklad Podívejme se na následující problém. Uvažujme množinu M bodů [x,y] R 2, které splňují rovnici F(x, y) = 0, M = {[x,y] D F F(x,y) = 0}, kde z = F(x,y) je nějaká funkce dvou proměnných. Je-li F(x,y)
Aplikovaná numerická matematika
 Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Aplikovaná numerická matematika 6. Metoda nejmenších čtverců doc. Ing. Róbert Lórencz, CSc. České vysoké učení technické v Praze Fakulta informačních technologií Katedra počítačových systémů Příprava studijních
Primitivní funkce a Riemann uv integrál Lineární algebra Taylor uv polynom Extrémy funkcí více prom ˇenných Matematika III Matematika III Program
 Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
1 Mnohočleny a algebraické rovnice
 1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
Necht tedy máme přirozená čísla n, k pod pojmem systém lineárních rovnic rozumíme rovnice ve tvaru
 2. Systémy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních rovnic s koeficienty z pole reálných případně komplexních čísel. Uvádíme podmínku pro existenci řešení systému lineárních
2. Systémy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních rovnic s koeficienty z pole reálných případně komplexních čísel. Uvádíme podmínku pro existenci řešení systému lineárních
Věta o dělení polynomů se zbytkem
 Věta o dělení polynomů se zbytkem Věta. Nechť R je okruh, f, g R[x], přičemž vedoucí koeficient polynomu g 0 je jednotka okruhu R. Pak existuje jediná dvojice polynomů q, r R[x] taková, že st(r) < st(g)
Věta o dělení polynomů se zbytkem Věta. Nechť R je okruh, f, g R[x], přičemž vedoucí koeficient polynomu g 0 je jednotka okruhu R. Pak existuje jediná dvojice polynomů q, r R[x] taková, že st(r) < st(g)
Zimní semestr akademického roku 2015/ ledna 2016
 Cvičení k předmětu BI-ZMA Tomáš Kalvoda Katedra aplikované matematiky FIT ČVUT Matěj Tušek Katedra matematiky FJFI ČVUT Zimní semestr akademického roku 015/016 5. ledna 016 Obsah Cvičení Předmluva iii
Cvičení k předmětu BI-ZMA Tomáš Kalvoda Katedra aplikované matematiky FIT ČVUT Matěj Tušek Katedra matematiky FJFI ČVUT Zimní semestr akademického roku 015/016 5. ledna 016 Obsah Cvičení Předmluva iii
4 Numerické derivování a integrace
 Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 7, strany 85-94. Jedná se o úlohu výpočtu (první či druhé) derivace či o výpočet určitého integrálu jinými metodami,
Břetislav Fajmon, UMAT FEKT, VUT Brno Téma je podrobně zpracováno ve skriptech [1], kapitola 7, strany 85-94. Jedná se o úlohu výpočtu (první či druhé) derivace či o výpočet určitého integrálu jinými metodami,
1 Diference a diferenční rovnice
 1 Diference a diferenční rovnice Nechť je dána ekvidistantní síť uzlů x 0, x 1,..., x n tj. h R, h > 0 takové, že x i = x 0 + ih, i = 0, 1,..., n. Číslo h se nazývá krok. Někdy můžeme uvažovat i nekonečnou
1 Diference a diferenční rovnice Nechť je dána ekvidistantní síť uzlů x 0, x 1,..., x n tj. h R, h > 0 takové, že x i = x 0 + ih, i = 0, 1,..., n. Číslo h se nazývá krok. Někdy můžeme uvažovat i nekonečnou
1 Vektorové prostory.
 1 Vektorové prostory DefiniceMnožinu V, jejíž prvky budeme označovat a, b, c, z, budeme nazývat vektorovým prostorem právě tehdy, když budou splněny následující podmínky: 1 Je dáno zobrazení V V V, které
1 Vektorové prostory DefiniceMnožinu V, jejíž prvky budeme označovat a, b, c, z, budeme nazývat vektorovým prostorem právě tehdy, když budou splněny následující podmínky: 1 Je dáno zobrazení V V V, které
Cvičné texty ke státní maturitě z matematiky
 Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Cvičné texty ke státní maturitě z matematiky Pracovní listy s postupy řešení Brno 2010 RNDr. Rudolf Schwarz, CSc. Státní maturita z matematiky Úloha 1 1. a = s : 45 = 9.10180 45 = 9.101+179 45 = 9.10.10179
Nelineární rovnice. Numerické metody 6. května FJFI ČVUT v Praze
 Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
Nelineární rovnice Numerické metody 6. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod Ohraničení kořene Hledání kořene Soustava Programy 1 Úvod Úvod - Úloha Hledáme bod x, ve kterém je splněno pro zadanou funkci
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Numerické řešení nelineárních rovnic
 Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
Numerické řešení nelineárních rovnic Mirko Navara http://cmp.felk.cvut.cz/ navara/ Centrum strojového vnímání, katedra kybernetiky FEL ČVUT Karlovo náměstí, budova G, místnost 104a http://math.feld.cvut.cz/nemecek/nummet.html
α β ) právě tehdy, když pro jednotlivé hodnoty platí β1 αn βn. Danou relaci nazýváme relace
 právě tehdy, když pro jednotlivé hodnoty platí β1 αn βn. Danou relaci nazýváme relace") Monotónní a Lineární Funkce 1. Relace předcházení a to Uvažujme dva vektory hodnot proměnných α = α,, 1 αn ( ) a β = ( β β ) 1,, n x,, 1 xn. Říkáme, že vekto r hodnot α předchází vektor hodnot β (značíme
Monotónní a Lineární Funkce 1. Relace předcházení a to Uvažujme dva vektory hodnot proměnných α = α,, 1 αn ( ) a β = ( β β ) 1,, n x,, 1 xn. Říkáme, že vekto r hodnot α předchází vektor hodnot β (značíme
Diferenciální počet 1 1. f(x) = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.
 = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.") Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
6 Skalární součin. u v = (u 1 v 1 ) 2 +(u 2 v 2 ) 2 +(u 3 v 3 ) 2
 2 +(u 2 v 2 ) 2 +(u 3 v 3 ) 2") 6 Skalární součin Skalární součin 1 je operace, která dvěma vektorům (je to tedy binární operace) přiřazuje skalár (v našem případě jde o reálné číslo, obecně se jedná o prvek nějakého tělesa T ). Dovoluje
6 Skalární součin Skalární součin 1 je operace, která dvěma vektorům (je to tedy binární operace) přiřazuje skalár (v našem případě jde o reálné číslo, obecně se jedná o prvek nějakého tělesa T ). Dovoluje
9. přednáška 26. listopadu f(a)h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1
h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1") 9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
ALGEBRA. 1. Pomocí Eukleidova algoritmu najděte největší společný dělitel čísel a a b. a) a = 204, b = 54, b) a = , b =
 a = 204, b = 54, b) a = , b =") ALGEBRA 1 Úkol na 13. 11. 2018 1. Pomocí Eukleidova algoritmu najděte největší společný dělitel čísel a a b. a) a = 204, b = 54, b) a = 353 623, b = 244 571. 2. Připomeňte si, že pro ε = cos 2π 3 + i sin
ALGEBRA 1 Úkol na 13. 11. 2018 1. Pomocí Eukleidova algoritmu najděte největší společný dělitel čísel a a b. a) a = 204, b = 54, b) a = 353 623, b = 244 571. 2. Připomeňte si, že pro ε = cos 2π 3 + i sin
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
4. OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE
 FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
Derivace funkce. Přednáška MATEMATIKA č Jiří Neubauer
 Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti
 Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
Kapitola 5 Vektorové prostory V předchozí kapitole jsme podstatným způsobem rozšířili naši představu o tom, co je to číslo. Nadále jsou pro nás důležité především vlastnosti operací sčítání a násobení
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Derivace a monotónnost funkce
 Derivace a monotónnost funkce Věta : Uvažujme funkci f (x), která má na intervalu I derivaci f (x). Pak platí: je-li f (x) > 0 x I, funkce f je na intervalu I rostoucí. je-li f (x) < 0 x I, funkce f je
Derivace a monotónnost funkce Věta : Uvažujme funkci f (x), která má na intervalu I derivaci f (x). Pak platí: je-li f (x) > 0 x I, funkce f je na intervalu I rostoucí. je-li f (x) < 0 x I, funkce f je
Matematika I, část I. Rovnici (1) nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.
 nazýváme vektorovou rovnicí roviny ABC. Rovina ABC prochází bodem A a říkáme, že má zaměření u, v. X=A+r.u+s.") 3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
3.4. Výklad Předpokládejme, že v prostoru E 3 jsou dány body A, B, C neležící na jedné přímce. Těmito body prochází jediná rovina, kterou označíme ABC. Určíme vektory u = B - A, v = C - A, které jsou zřejmě
Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)
![Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)](/thumbs/96/128965676.jpg "Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)") 1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
Diferenˇcní rovnice Diferenciální rovnice Matematika IV Matematika IV Program
 Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
1. Náhodný vektor (X, Y ) má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.
 má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.") VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
3 Lineární kombinace vektorů. Lineární závislost a nezávislost
 3 Lineární kombinace vektorů. Lineární závislost a nezávislost vektorů. Obrázek 5: Vektor w je lineární kombinací vektorů u a v. Vektory u, v a w jsou lineárně závislé. Obrázek 6: Vektor q je lineární
3 Lineární kombinace vektorů. Lineární závislost a nezávislost vektorů. Obrázek 5: Vektor w je lineární kombinací vektorů u a v. Vektory u, v a w jsou lineárně závislé. Obrázek 6: Vektor q je lineární
Matematika I A ukázkový test 1 pro 2011/2012. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a
x + (a + 1)y + z = 1 a") Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
16 Fourierovy řady Úvod, základní pojmy
 M. Rokyta, MFF UK: Aplikovaná matematika IV kap. 16: Fourierovy řady 1 16 Fourierovy řady 16.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
M. Rokyta, MFF UK: Aplikovaná matematika IV kap. 16: Fourierovy řady 1 16 Fourierovy řady 16.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky
 6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
6. Vázané a absolutní extrémy. 01-a3b/6abs.tex Hledáme lokální extrémy funkce vzhledem k množině, která je popsána jednou či několika rovnicemi, vazebními podmínkami. Pokud jsou podmínky jednoduché, vyřešíme
X = x, y = h(x) Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní
 Y = y. hodnotám x a jedné hodnotě y. Dostaneme tabulku hodnot pravděpodobnostní") ..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
..08 8cv7.tex 7. cvičení - transformace náhodné veličiny Definice pojmů a základní vzorce Je-li X náhodná veličina a h : R R je měřitelná funkce, pak náhodnou veličinu Y, která je definovaná vztahem X
7. Aplikace derivace
 7. Aplikace derivace Verze 20. července 2017 Derivace funkce se využívá při řešení úloh technické praxe i teorie. Uvedeme několik z nich: vyčíslení hodnot funkce, výpočet limity, vyšetřování průběhu funkce
7. Aplikace derivace Verze 20. července 2017 Derivace funkce se využívá při řešení úloh technické praxe i teorie. Uvedeme několik z nich: vyčíslení hodnot funkce, výpočet limity, vyšetřování průběhu funkce
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
9. T r a n s f o r m a c e n á h o d n é v e l i č i n y
 9. T r a n s f o r m a c e n á h o d n é v e l i č i n y Při popisu procesů zpracováváme vstupní údaj, hodnotu x tak, že výstupní hodnota y závisí nějakým způsobem na vstupní, je její funkcí y = f(x).
9. T r a n s f o r m a c e n á h o d n é v e l i č i n y Při popisu procesů zpracováváme vstupní údaj, hodnotu x tak, že výstupní hodnota y závisí nějakým způsobem na vstupní, je její funkcí y = f(x).
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
em do konce semestru. Obsah Vetknutý nosník, str. 8 Problém č.8: Průhyb nosníku - Ritzova metoda
 Zápočtové problémy Na následujících stránkách naleznete druhou sérii zápočtových problémů věnovanou nosníkům. Ti, co ještě nemají žádný problém přidělený, si mohou vybrat libovolný z nich. Řešení můžete
Zápočtové problémy Na následujících stránkách naleznete druhou sérii zápočtových problémů věnovanou nosníkům. Ti, co ještě nemají žádný problém přidělený, si mohou vybrat libovolný z nich. Řešení můžete
a vlastních vektorů Příklad: Stanovte taková čísla λ, pro která má homogenní soustava Av = λv nenulové (A λ i I) v = 0.
 v = 0.") Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Výpočet vlastních čísel a vlastních vektorů S pojmem vlastního čísla jsme se již setkali například u iteračních metod pro řešení soustavy lineárních algebraických rovnic. Velikosti vlastních čísel iterační
Obsah. Aplikovaná matematika I. Gottfried Wilhelm Leibniz. Základní vlastnosti a vzorce
 Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních
Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních
Numerické metody zpracování výsledků
 Numerické metody zpracování výsledků Měření fyzikální veličiny provádíme obvykle tak, že měříme hodnoty y jedné fyzikální veličiny při určitých hodnotách x druhé veličiny, na které měřená veličina závisí.
Numerické metody zpracování výsledků Měření fyzikální veličiny provádíme obvykle tak, že měříme hodnoty y jedné fyzikální veličiny při určitých hodnotách x druhé veličiny, na které měřená veličina závisí.
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb
 Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
2.6. VLASTNÍ ČÍSLA A VEKTORY MATIC
 .6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
.6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
8. Okrajový problém pro LODR2
 8. Okrajový problém pro LODR2 A. Základní poznatky o soustavách ODR1 V kapitole 6 jsme zavedli pojem lineární diferenciální rovnice n-tého řádu, která je pro n = 2 tvaru A 2 (x)y + A 1 (x)y + A 0 (x)y
8. Okrajový problém pro LODR2 A. Základní poznatky o soustavách ODR1 V kapitole 6 jsme zavedli pojem lineární diferenciální rovnice n-tého řádu, která je pro n = 2 tvaru A 2 (x)y + A 1 (x)y + A 0 (x)y
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Kapitola 11: Lineární diferenciální rovnice 1/15
 Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Matematická analýza ve Vesmíru. Jiří Bouchala
 Matematická analýza ve Vesmíru Jiří Bouchala Katedra aplikované matematiky jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala - p. 1/19 typu: m x (sin x, cos x) R(x, ax +...)dx. Matematická analýza ve Vesmíru.
Matematická analýza ve Vesmíru Jiří Bouchala Katedra aplikované matematiky jiri.bouchala@vsb.cz www.am.vsb.cz/bouchala - p. 1/19 typu: m x (sin x, cos x) R(x, ax +...)dx. Matematická analýza ve Vesmíru.
Seznámíte se s principem integrace metodou per partes a se základními typy integrálů, které lze touto metodou vypočítat.
 .. Integrace metodou per partes.. Integrace metodou per partes Průvodce studiem V předcházející kapitole jsme poznali, že integrování součtu funkcí lze provést jednoduše, známe-li integrály jednotlivých
.. Integrace metodou per partes.. Integrace metodou per partes Průvodce studiem V předcházející kapitole jsme poznali, že integrování součtu funkcí lze provést jednoduše, známe-li integrály jednotlivých
7. Soustavy ODR1 Studijní text. 7. Soustavy ODR1. A. Základní poznatky o soustavách ODR1
 7 Soustavy ODR1 A Základní poznatky o soustavách ODR1 V inženýrské praxi se se soustavami diferenciálních rovnic setkáváme především v úlohách souvisejících s mechanikou Příkladem může být úloha popsat
7 Soustavy ODR1 A Základní poznatky o soustavách ODR1 V inženýrské praxi se se soustavami diferenciálních rovnic setkáváme především v úlohách souvisejících s mechanikou Příkladem může být úloha popsat
SPECIÁLNÍCH PRIMITIVNÍCH FUNKCÍ INTEGRACE RACIONÁLNÍCH FUNKCÍ
 VÝPOČET PEIÁLNÍH PRIMITIVNÍH FUNKÍ Obecně nelze zadat algoritmus, který by vždy vedl k výpočtu primitivní funkce. Nicméně eistují jisté třídy funkcí, pro které eistuje algoritmus, který vždy vede k výpočtu
VÝPOČET PEIÁLNÍH PRIMITIVNÍH FUNKÍ Obecně nelze zadat algoritmus, který by vždy vedl k výpočtu primitivní funkce. Nicméně eistují jisté třídy funkcí, pro které eistuje algoritmus, který vždy vede k výpočtu
9. T r a n s f o r m a c e n á h o d n é v e l i č i n y
 9. T r a n s f o r m a c e n á h o d n é v e l i č i n Při popisu procesů zpracováváme vstupní údaj, hodnotu x tak, že výstupní hodnota závisí nějakým způsobem na vstupní, je její funkcí = f(x). Pokud
9. T r a n s f o r m a c e n á h o d n é v e l i č i n Při popisu procesů zpracováváme vstupní údaj, hodnotu x tak, že výstupní hodnota závisí nějakým způsobem na vstupní, je její funkcí = f(x). Pokud
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
Řešení diferenciálních rovnic
 Projekt M3 Řešení diferenciálních rovnic 1. Zadání A. Stanovte řešení dané diferenciální rovnice popřípadě soustavy rovnic. i) Pro úlohy M3.1 až M3.12: uveďte matematický popis použité metody sestavte
Projekt M3 Řešení diferenciálních rovnic 1. Zadání A. Stanovte řešení dané diferenciální rovnice popřípadě soustavy rovnic. i) Pro úlohy M3.1 až M3.12: uveďte matematický popis použité metody sestavte
Přednáška 6, 6. listopadu 2013
 Přednáška 6, 6. listopadu 2013 Kapitola 2. Posloupnosti a řady funkcí. V dalším jsou f, f n : M R, n = 1, 2,..., reálné funkce jedné reálné proměnné definované na (neprázdné) množině M R. Co to znamená,
Přednáška 6, 6. listopadu 2013 Kapitola 2. Posloupnosti a řady funkcí. V dalším jsou f, f n : M R, n = 1, 2,..., reálné funkce jedné reálné proměnné definované na (neprázdné) množině M R. Co to znamená,
Aproximace a interpolace
 Aproximace a interpolace Matematické algoritmy (11MAG) Jan Přikryl 12. přednáška 11MAG pondělí 15. prosince 2014 verze:2014-12-15 11:10 Obsah 1 Úlohy 2 1.1 Aproximace funkcí...................................
Aproximace a interpolace Matematické algoritmy (11MAG) Jan Přikryl 12. přednáška 11MAG pondělí 15. prosince 2014 verze:2014-12-15 11:10 Obsah 1 Úlohy 2 1.1 Aproximace funkcí...................................
Těleso racionálních funkcí
 Těleso racionálních funkcí Poznámka. V minulém semestru jsme libovolnému oboru integrity sestrojili podílové těleso. Pro libovolné těleso R je okruh polynomů R[x] oborem integrity, máme tedy podílové těleso
Těleso racionálních funkcí Poznámka. V minulém semestru jsme libovolnému oboru integrity sestrojili podílové těleso. Pro libovolné těleso R je okruh polynomů R[x] oborem integrity, máme tedy podílové těleso
LDF MENDELU. Simona Fišnarová (MENDELU) Základy lineárního programování VMAT, IMT 1 / 25
 Základy lineárního programování VMAT, IMT 1 / 25") Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
Základy lineárního programování Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem
Učební texty k státní bakalářské zkoušce Matematika Skalární součin. študenti MFF 15. augusta 2008
 Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost
Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost
Soustavy lineárních rovnic a determinanty
 Soustavy lineárních rovnic a determinanty Petr Hasil Přednáška z matematiky Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny
Soustavy lineárních rovnic a determinanty Petr Hasil Přednáška z matematiky Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny
1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH
 1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH V minulém semestru jsme studovali vlastnosti unkcí jedné nezávislé proměnné. K popisu mnoha reálných situací obvkle s jednou proměnnou nevstačíme. FUNKCE DVOU
1. DIFERENCIÁLNÍ POČET FUNKCE DVOU PROMĚNNÝCH V minulém semestru jsme studovali vlastnosti unkcí jedné nezávislé proměnné. K popisu mnoha reálných situací obvkle s jednou proměnnou nevstačíme. FUNKCE DVOU
Diferenciální rovnice 3
 Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Maticí typu (m, n), kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru:
, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru:") 3 Maticový počet 3.1 Zavedení pojmu matice Maticí typu (m, n, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru: a 11 a 12... a 1k... a 1n a 21 a 22...
3 Maticový počet 3.1 Zavedení pojmu matice Maticí typu (m, n, kde m, n jsou přirozená čísla, se rozumí soubor mn veličin a jk zapsaných do m řádků a n sloupců tvaru: a 11 a 12... a 1k... a 1n a 21 a 22...