Základní pojmy o signálech
|
|
|
- Přemysl Mach
- před 10 lety
- Počet zobrazení:
Transkript
1 Základní pojmy o signálech klasifikace signálů transformace časové osy energie a výkon periodické signály harmonický signál jednotkový skok a impuls Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1

2 Signály libovolné fyzikální veličiny. jedna nebo několik nezávislých proměnných (většinou čas), jedna závislá. Příklady: akustický tlak vyvolaný hláskou e, stupně šedi na dálnici D1, kurs Kč vůči EUR. ČB snímku, síla asfaltu na 2

3 prac. dny 3 CZK/EUR leden 2002

4 Matematický pohled na signály (1 nezávislá proměnná) funkce, které převádějí nezávislou proměnnou z množiny T (signálová osa) na hodnoty z množiny A. Podle charakteru množiny T děĺıme signály na: signály se spojitým časem: t R, definován všude. Příklad: rychlost autobusu na cestě z Prahy do Brna v závislosti na čase. Budeme značit s(t). signály s diskrétním časem: n Z, pouze celočíselné hodnoty, jinde nedefinováno. Budeme značit s[n], n nemá rozměr. Příklad: můj plat v 12-ti měsících tohoto roku. Jelikož diskrétní signály nejsou nic jiného než řady čísel, budeme je někdy nazývat posloupnosti. Za množinu A budeme v průběhu tohoto kursu většinou pokládat množinu reálných čísel R, avšak mohou to být i komplexní čísla. Praktické aplikace v IT: vždy konečný počet hodnot (kvantování). 4
![signály s diskrétním časem: n Z, pouze celočíselné hodnoty, jinde nedefinováno. Budeme značit s[n], n nemá rozměr. Příklad: můj plat v 12-ti měsících tohoto roku.](/docs-images/41/377877/images/page_4.jpg "Jelikož diskrétní signály nejsou nic jiného než řady čísel, budeme je někdy nazývat posloupnosti.")
5 Deterministické a náhodné signály Deterministické signály můžeme zapsat vztahem, rovnicí, nerovností. Pro každý čas t či n víme, jaké hodnoty signál nabude. Příklad 1: obdélníkový impuls se spojitým časem: x(t) = 2 pro 2 t 2 0 jinde Příklad 2: diskrétní jednotkový impuls: δ[n] = 1 pro n = 0 0 jinde 5
 = 2 pro 2 t 2 0 jinde")
6 Náhodné signály popsat rovnicí nemůžeme a pro čas t či n nikdy přesně nevíme, jaká bude jejich hodnota. Můžeme je charakterizovat pouze pomocí parametrů (např. střední hodnota, rozptyl). Více v přednáškách ke konci semestru. 6
.")
7 Transformace nezávislé proměnné změny časové osy Jak se změní původní signál s(t) či s[n], změníme-li časovou osu? Příklady na signálu se spojitým časem: Otočení časové osy: s( t) všechno je naopak. 7

8 Zpoždění signálu: s(t τ) pro kladné τ signál se objeví později. Předběhnutí signálu: s(t + τ) pro kladné τ signál se objeví dříve. 8
")
9 Obrácení časové osy s posunutím Otočení se zpožděním(!): s( t + τ) pro kladné τ. Otočení s předběhnutím(!): s( t τ) pro kladné τ. V případech s otočenou časovou osou mají znaménka opačný význam. 9

10 Kontrola: najít si na časové ose změněného signálu několik významných bodů. pro každý z nich si vyhodnotit časovou modifikaci. podívat se do původního signálu, zda to sedí. Příklad: Nejsme si jisti, zda jsme s( t + 1) namalovali správně. s( t + 1) pro t = 0 má hodnotu = 1, původní signál s(t) v čase 1 má také hodnotu 1 OK. s( t + 1) pro t = 2 má hodnotu = 1, původní signál s(t) v čase -1 má také hodnotu 0 OK. 10
 v čase 1 má také hodnotu 1 OK. s( t + 1) pro t = 2 má hodnotu 0.")
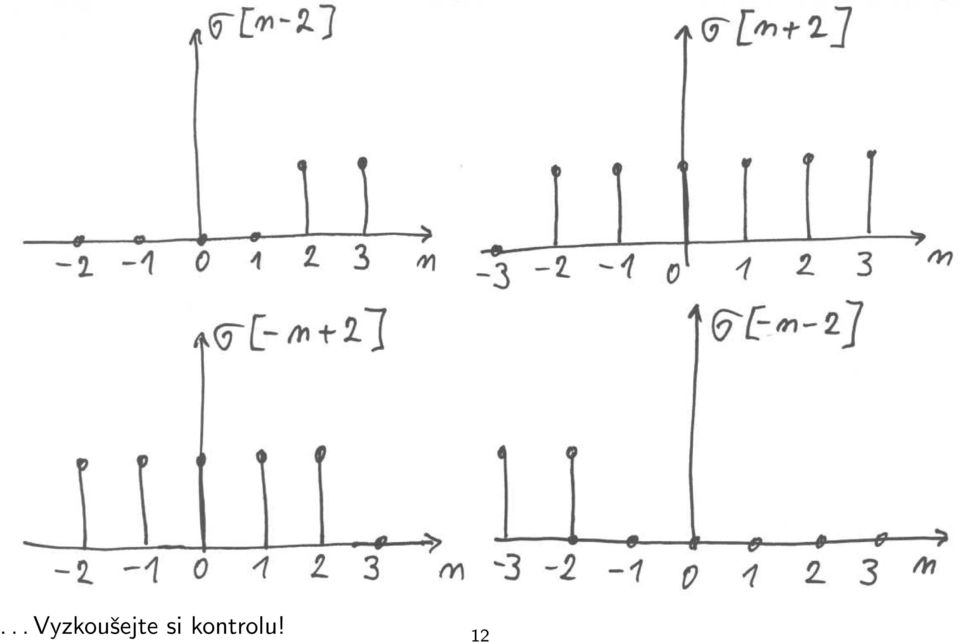
11 Příklady na signálu s diskrétním časem diskrétní jednotkový skok: 11

12 ... Vyzkoušejte si kontrolu! 12
13 Změna časového měřítka Kontrakce času: s(mt) pro kladné m > 1 čas běží rychleji a všechno je kratší. Dilatace času: s( t m ) pro kladné m > 1 čas běží pomaleji a všechno je delší.... vyzkoušejte si pomůcku i pro kontrakci/dilataci času! 13

14 Energie a výkon okamžitý výkon na rezistoru můžeme spočítat jako: p(t) = u(t)i(t) = u 2 (t)/r = i 2 (t)r. Napětí i proud zde vystupují ve druhé mocnině. Při zpracování signálů většinou žádné rezistory nemáme (pokud by nám opravdu chyběl, můžeme si jej představit, s odporem 1Ω), okamžitý výkon bude dán: p(t) = s(t) 2 Absolutní hodnota není potřeba pro reálné signály, je ve vzorci pouze pro šílence pracující s komplexními signály. Pro diskrétní signály: p[n] = s[n] 2 Zajímá-li nás energie a průměrný výkon signálu v intervalu [t 1, t 2 ]: t2 t 1 p(t)dt = t2 t 1 s(t) 2 dt 1 t 2 t 1 t2 t 1 p(t)dt = 1 t 2 t 1 t2 t 1 s(t) 2 dt 14
dt = t2 t 1 s(t) 2 dt 1 t 2 t 1 t2 t")
15 podobně pro diskrétní signály: n 2 n 1 p[n] = n 2 n 1 s[n] 2 1 n 2 n 1 n 2 n 1 p[n] = 1 n 2 n 1 n 2 n 1 s[n] 2 V mnoha případech nás bude zajímat celková energie v celém rozmezí časů od do : T E = lim T T s(t) 2 dt = + s(t) 2 dt E = lim N N s[n] 2 = N s[n] 2 Podle hodnoty E děĺıme signály na signály s konečnou energíı a signály s nekonečnou energíı. Podobně celkový střední výkon: P = lim T 1 2T T T s(t) 2 dt P = lim N 1 2N + 1 N s[n] 2 N Pokud je P nenulový, je E =. 15
![N N s[n] 2 = N s[n] 2 Podle hodnoty E děĺıme signály na signály s konečnou energíı a signály s nekonečnou energíı.](/docs-images/41/377877/images/page_15.jpg "Podobně celkový střední výkon: P = lim T 1 2T T T s(t) 2 dt P = lim N 1 2N + 1 N s[n] 2 N Pokud je P nenulový, je E =.")
16 Neperiodické a periodické signály Pro neperiodické signály nemůžeme najít T nebo N takové, že: s(t + T ) = s(t) spojitý čas (1) s[n + N] = s(n) diskrétní čas, (2) signály se v čase neopakují. Pokud je T či N možné nalézt, hovoříme o periodických signálech. Např. 16
![(1) s[n + N] = s(n) diskrétní čas, (2) signály se v čase neopakují.](/docs-images/41/377877/images/page_16.jpg "Pokud je T či N možné nalézt, hovoříme o periodických signálech.")
17 se opakuje po T = 20 s, ale také po T = 40 s, T = 60 s, atd. Nejmenší hodnota T, pro kterou rovnice 1 platí, se nazývá základní perioda T 1. Podobně pro diskrétní signály: Signál se opakuje po N = 3, ale také po N = 6, N = 9, atd. Nejmenší hodnota N, pro kterou rovnice 2 platí, se nazývá základní perioda N 1. 17

18 Harmonické signály jsou nejjednodušeji definovanými periodickými signály a jsou chlebem a soĺı zpracování signálů, proto jim musíme věnovat náležitou pozornost. s(t) = C 1 cos(ω 1 t + φ 1 ) (3) 18

19 C 1 je kladná konstanta amplituda (maximální hodnota). ω 1 je kladná konstanta úhlový nebo kruhový kmitočet [rad/s]. Ke skutečnému kmitočtu f 1 je vztažen: ω 1 = 2πf 1. Základní perioda harmonického signálu T 1 = 1 f 1 = 2π ω 1. φ 1 je počáteční fáze [rad]. Hodnota signálu pro t = 0 je s(0) = C 1 cos φ 1. Ve zpracování signálů pracujeme vždy s radiány! Nezapomeňte si přepnout kalkulačky! Hodnoty značíme indexem 1, protože později budeme rozkládat obecné periodické signály do harmonických a koeficienty budeme indexovat. 19
![φ 1 je počáteční fáze [rad]. Hodnota signálu pro t = 0 je s(0) = C 1 cos φ 1. Ve zpracování signálů pracujeme vždy s radiány!](/docs-images/41/377877/images/page_19.jpg "Nezapomeňte si přepnout kalkulačky!")
20 Výkon periodických signálů U obecných signálů jsme střední výkon počítali: P = lim T 1 2T T T s(t) 2 dt V případě periodických lze integrovat pouze přes jednu základní periodu a to jakkoliv: P s = 1 T 1 T1 /2 T 1 /2 s(t) 2 dt = 1 T 1 T1 0 s(t) 2 dt =... Velmi používaným údajem, který se odvozuje ze středního výkonu periodického signálu, je efektivní hodnota velikost stejnosměrného signálu, který by dal na stejné zátěži (kdybychom nějakou měli :-) stejný střední výkon: C ef = P s. 20

21 Jak je tomu u harmonického signálu (fázi neuvažujeme): s(t) = C 1 cos(ω 1 t)? Používáme vzoreček cos 2 α = 1+cos 2α 2 : P s = 1 T1 [C 1 cos(ω 1 t)] 2 dt = 1 T1 T 1 T C (1 + cos 2ω 1t)dt Integrál cosinu je 0 (uvědomte si, že v libovolném množství period funkce cos jsou záporné plochy vyváženy kladnými), takže zbývá: P s = 1 T 1 T C 1 2 dt = 1 2 C 1 T 1 2 T 1 = C 1 2 Z toho vyplývá známá poučka o efektivní hodnotě harmonického signálu: C ef = P s = C 1 2, kterou už jste asi viděli... Pozor! Platí opravdu pouze pro harmonický signál! 2 21
22 Harmonické signály s diskrétním časem s[n] = C 1 cos(ω 1 n + φ 1 ) (4) C 1 je kladná konstanta amplituda. ω 1 je kladná konstanta úhlový nebo kruhový kmitočet. Jelikož je n bezrozměrné, je zde jednotka ω 1 pouze [rad]. φ 1 je počáteční fáze [rad]. Hodnota signálu pro n = 0 je s[0] = C 1 cos φ 1. Příklad: s[n] = 5 cos(2πn/12), ω 1 = π/6. 5 s[n] n Se základní periodou harmonické posloupnosti máme drobný problém. Není možné ji vypočítat podobně jako u signálu se spojitým časem pomocí: N 1 = 2π ω 1, protože by mohlo 22
23 vyjít necelé číslo. N 1 jako počet vzorků musí být vždy celý. Musíme najít takové N 1, aby platila podmínka periodicity: cos [ω 1 (n + N 1 )] = cos ω 1 n. Víme, že základní perioda funkce cos je 2π a že podmínka bude splněna pouze pro rozdíl argumentů rovný celočíselnému násobku 2π: ω 1 (n + N 1 ) ω 1 n = ω 1 N 1 = k2π, kde k je celé číslo takové, aby N 1 bylo nejmenší možné. Příklad 1: s[n] = 5 cos(2πn/12), ω 1 = π/6. π 6 N 1 = k2π, řešení je jednoduché: k = 1, N 1 = 12 (viz obrázek). Srovnání kdyby byl signál se spojitým časem, základní perioda by byla: T 1 = 2π π/6 = 12. Výsledek je stejný. Příklad 2: s[n] = cos(8πn/31), ω 1 = 8π/31. 8π 31 N 1 = k2π, k = 4 31 N 1, 31k = 4N 1. Řešením je: k = 4, N 1 = 31. Srovnání kdyby byl signál se spojitým časem, základní perioda by byla: T 1 = 2π 8π/31 = Výsledek je jiný perioda je podstatně kratší, protože nemusíme čekat na celé číslo. 23
24 1 0.5 s[n] n Příklad 3: s[n] = cos(n/6), ω 1 = 1/ N 1 = k2π, N 1 = k12π. Řešení neexistuje, signál není periodický (ale vypadá tak :-) Srovnání kdyby byl signál se spojitým časem, základní perioda by byla: T 1 = 2π 1/6 = 12π. Signál je samozřejmě periodický s[n] n 24
25 Některé velmi zajímavé a užitečné signály diskrétní Jednotkový skok a jednotkový impuls: 1 pro n 0 σ[n] = 0 jinde δ[n] = 1 pro n = 0 0 jinde 25
26 Všimněme si, že jednotkový impuls vznikl diferencováním jednotkového skoku: δ[n] = σ[n] σ[n 1] Posunutý jednotkový impuls δ[n k]: 26
27 Některé velmi zajímavé a užitečné signály spojitý čas Jednotkový skok: σ(t) = 1 pro t 0 0 jinde Jednotkový impuls se spojitým časem (Diracův impuls) nadefinujeme jako derivaci jednotkového skoku podle času: δ(t) = dσ(t). dt Problémem je, že nevíme, jak derivovat funkci σ(t) pro t = 0 (nespojitost). Pomůžeme si malým trikem: δ (t) = dσ (t). dt 27
28 σ (t) má mezi 0 a směrnici (a tedy i derivaci) 1. Všimněme si, že plocha obdélníčku ohraničeného funkcí δ (t) (tedy její integrál) je rovna 1. Pak budeme zmenšovat limitně až k nule: δ(t) = lim δ (t). 0 Plocha jednotkového impulsu je tedy stále jedna, i když jeho hodnota pro t = 0 vzroste na : + δ(t)dt = 1. 28
29 Tuto plochu nazýváme mocnost a jednotkový impuls ji změní, pokud jej něčím vynásobíme: Jednotkové impulsy mají tzv. vzorkovací schopnost, ale o té až příště :-) 29
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cziba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz II. SIGNÁLY ZÁKLADNÍ POJMY SIGNÁL - DEFINICE SIGNÁL - DEFINICE Signál je jev fyzikální, chemické, biologické, ekonomické či jiné
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Úvod do zpracování signálů
 1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
1 / 25 Úvod do zpracování signálů Karel Horák Rozvrh přednášky: 1. Spojitý a diskrétní signál. 2. Spektrum signálu. 3. Vzorkovací věta. 4. Konvoluce signálů. 5. Korelace signálů. 2 / 25 Úvod do zpracování
ÚPGM FIT VUT Brno, periodické a harmonické posloupnosti. konvoluce Fourierova transformace s diskrétním časem
 Diskrétní signály a jejich frekvenční analýza. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz opakování základy o diskrétních signálech. periodické a harmonické posloupnosti operace s diskrétními
Diskrétní signály a jejich frekvenční analýza. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz opakování základy o diskrétních signálech. periodické a harmonické posloupnosti operace s diskrétními
Funkce komplexní proměnné a integrální transformace
 Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz, Kamenice 3, 4. patro, dv.č.424 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. FREKVENČNÍ TRASFORMACE SPOJITÉ
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz, Kamenice 3, 4. patro, dv.č.424 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz IV. FREKVENČNÍ TRASFORMACE SPOJITÉ
Náhodné signály. Honza Černocký, ÚPGM
 Náhodné signály Honza Černocký, ÚPGM Signály ve škole a v reálném světě Deterministické Rovnice Obrázek Algoritmus Kus kódu } Můžeme vypočítat Málo informace! Náhodné Nevíme přesně Pokaždé jiné Především
Náhodné signály Honza Černocký, ÚPGM Signály ve škole a v reálném světě Deterministické Rovnice Obrázek Algoritmus Kus kódu } Můžeme vypočítat Málo informace! Náhodné Nevíme přesně Pokaždé jiné Především
Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti.
 U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
U. 4. Goniometrie Nejprve si připomeňme z geometrie pojem orientovaného úhlu a jeho velikosti. 4.. Orientovaný úhel a jeho velikost. Orientovaným úhlem v rovině rozumíme uspořádanou dvojici polopřímek
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
Biofyzikální ústav LF MU Brno. jarní semestr 2011
 pro obor Ošetřovatelská péče v gerontologii Biofyzikální ústav LF MU Brno jarní semestr 2011 Obsah letmý dotyk teorie systémů klasifikace a analýza biosignálů Co je signál? Co je biosignál? Co si počít
pro obor Ošetřovatelská péče v gerontologii Biofyzikální ústav LF MU Brno jarní semestr 2011 Obsah letmý dotyk teorie systémů klasifikace a analýza biosignálů Co je signál? Co je biosignál? Co si počít
Fourierova transformace
 Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Fourierova transformace EO Přednáška Pavel Máša ÚVODEM Známe Fourierovy řady v komplexním tvaru f(t) = 1X k= 1 A k e jk! t Spektrum této řady je diskrétní A k = 1 T Obvody tedy musíme řešit v HUS člen
Spektrální analýza a diskrétní Fourierova transformace. Honza Černocký, ÚPGM
 Spektrální analýza a diskrétní Fourierova transformace Honza Černocký, ÚPGM Povídání o cosinusovce 2 Argument cosinusovky 0 2p a pak každé 2p perioda 3 Cosinusovka s diskrétním časem Úkol č. 1: vyrobit
Spektrální analýza a diskrétní Fourierova transformace Honza Černocký, ÚPGM Povídání o cosinusovce 2 Argument cosinusovky 0 2p a pak každé 2p perioda 3 Cosinusovka s diskrétním časem Úkol č. 1: vyrobit
Digitalizace převod AS DS (analogový diskrétní signál )
") Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Digitalizace signálu v čase Digitalizace převod AS DS (analogový diskrétní signál ) v amplitudě Obvykle převod spojité předlohy (reality) f 1 (t/x,...), f 2 ()... připomenutí Digitalizace: 1. vzorkování
Fourierova transformace
 Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
Je založen na pojmu derivace funkce a její užití. Z předchozího studia je třeba si zopakovat a orientovat se v pojmech: funkce, D(f), g 2 : y =
, g 2 : y =") 0.1 Diferenciální počet Je částí infinitezimálního počtu, což je souhrnný název pro diferenciální a integrální počet. Je založen na pojmu derivace funkce a její užití. Z předchozího studia je třeba si
0.1 Diferenciální počet Je částí infinitezimálního počtu, což je souhrnný název pro diferenciální a integrální počet. Je založen na pojmu derivace funkce a její užití. Z předchozího studia je třeba si
25.z-6.tr ZS 2015/2016
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace Typové členy 2 25.z-6.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ třetí část tématu předmětu pokračuje. A oblastí
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Bakalářská matematika I
 1. Funkce Diferenciální počet Mgr. Jaroslav Drobek, Ph. D. Katedra matematiky a deskriptivní geometrie Bakalářská matematika I Některé užitečné pojmy Kartézský součin podrobnosti Definice 1.1 Nechť A,
1. Funkce Diferenciální počet Mgr. Jaroslav Drobek, Ph. D. Katedra matematiky a deskriptivní geometrie Bakalářská matematika I Některé užitečné pojmy Kartézský součin podrobnosti Definice 1.1 Nechť A,
Signál v čase a jeho spektrum
 Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Signál v čase a jeho spektrum Signály v časovém průběhu (tak jak je vidíme na osciloskopu) můžeme dělit na periodické a neperiodické. V obou případech je lze popsat spektrálně určit jaké kmitočty v sobě
Derivace goniometrických funkcí
 Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
Derivace goniometrických funkcí Shrnutí Jakub Michálek, Tomáš Kučera Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech itách, odvodí se také několik typických it pomocí
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
Přednáška 1: Reálná funkce jedné reálné proměnné
 Přednáška : Reálná unkce jedné reálné proměnné Pojem unkce Deinice Reálnou unkcí jedné reálné proměnné rozumíme předpis y ( ) na jehož základě je každému prvku množiny D (zvané deiniční obor) přiřazen
Přednáška : Reálná unkce jedné reálné proměnné Pojem unkce Deinice Reálnou unkcí jedné reálné proměnné rozumíme předpis y ( ) na jehož základě je každému prvku množiny D (zvané deiniční obor) přiřazen
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady, vlastnosti Vzorkovací
doc. Dr. Ing. Elias TOMEH Elias Tomeh / Snímek 1
 doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
doc. Dr. Ing. Elias TOMEH e-mail: elias.tomeh@tul.cz Elias Tomeh / Snímek 1 Frekvenční spektrum Dělení frekvenčního pásma (počet čar) Průměrování Časovou váhovou funkci Elias Tomeh / Snímek 2 Vzorkovací
Náhodný vektor. Náhodný vektor. Hustota náhodného vektoru. Hustota náhodného vektoru. Náhodný vektor je dvojice náhodných veličin (X, Y ) T = ( X
 T = ( X") Náhodný vektor Náhodný vektor zatím jsme sledovali jednu náhodnou veličinu, její rozdělení a charakteristiky často potřebujeme vyšetřovat vzájemný vztah několika náhodných veličin musíme sledovat jejich
Náhodný vektor Náhodný vektor zatím jsme sledovali jednu náhodnou veličinu, její rozdělení a charakteristiky často potřebujeme vyšetřovat vzájemný vztah několika náhodných veličin musíme sledovat jejich
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Derivace goniometrických. Jakub Michálek,
 Derivace goniometrických funkcí Jakub Michálek, Tomáš Kučera Shrnutí Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech limitách, odvodí se také dvě důležité limity. Vypočítá
Derivace goniometrických funkcí Jakub Michálek, Tomáš Kučera Shrnutí Odvodí se základní vztahy pro derivace funkcí sinus a cosinus za pomoci věty o třech limitách, odvodí se také dvě důležité limity. Vypočítá
VY_32_INOVACE_E 15 03
 Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Název a adresa školy: Střední škola průmyslová a umělecká, Opava, příspěvková organizace, Praskova 399/8, Opava, 746 01 Název operačního programu: OP Vzdělávání pro konkurenceschopnost, oblast podpory
Posloupnosti a řady. 28. listopadu 2015
 Posloupnosti a řady Přednáška 5 28. listopadu 205 Obsah Posloupnosti 2 Věty o limitách 3 Řady 4 Kritéria konvergence 5 Absolutní a relativní konvergence 6 Operace s řadami 7 Mocninné a Taylorovy řady Zdroj
Posloupnosti a řady Přednáška 5 28. listopadu 205 Obsah Posloupnosti 2 Věty o limitách 3 Řady 4 Kritéria konvergence 5 Absolutní a relativní konvergence 6 Operace s řadami 7 Mocninné a Taylorovy řady Zdroj
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Funkce a lineární funkce pro studijní obory
 Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
10. cvičení - LS 2017
 10. cvičení - LS 2017 Michal Outrata Příklad 1 Spočtěte následující itu daných posloupností: (a) (b) (c) n 3 +5n 2 n 3 6n 2 +3 n ; n 4 3n 2 6 n 4 + 3n 2 + 6; n 2 15n+2(1 n). 2(n 2) 3 2n 3 Příklad 2 Pro
10. cvičení - LS 2017 Michal Outrata Příklad 1 Spočtěte následující itu daných posloupností: (a) (b) (c) n 3 +5n 2 n 3 6n 2 +3 n ; n 4 3n 2 6 n 4 + 3n 2 + 6; n 2 15n+2(1 n). 2(n 2) 3 2n 3 Příklad 2 Pro
1. Několik základních pojmů ze středoškolské matematiky. Na začátku si připomeneme následující pojmy:
 Opakování středoškolské matematiky Slovo úvodem: Tato pomůcka je určena zejména těm studentům presenčního i kombinovaného studia na VŠFS, kteří na středních školách neprošli dostatečnou průpravou z matematiky
Opakování středoškolské matematiky Slovo úvodem: Tato pomůcka je určena zejména těm studentům presenčního i kombinovaného studia na VŠFS, kteří na středních školách neprošli dostatečnou průpravou z matematiky
Lineární a adaptivní zpracování dat. 3. SYSTÉMY a jejich popis ve frekvenční oblasti
 Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Lineární a adaptivní zpracování dat 3. SYSTÉMY a jejich popis ve frekvenční oblasti Daniel Schwarz Osnova Opakování: systémy a jejich popis v časové oblasti Fourierovy řady Frekvenční charakteristika systémů
Funkce tangens. cotgα = = B a. A Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá b přilehlá.
 4..0 Funkce tangens c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro všechna x R nemůžeme
4..0 Funkce tangens c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro všechna x R nemůžeme
Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY
 Vlastnosti funkcí Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Definiční obor Definiční obor funkce je množina všech čísel,
Vlastnosti funkcí Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Definiční obor Definiční obor funkce je množina všech čísel,
Nechť je číselná posloupnost. Pro všechna položme. Posloupnost nazýváme posloupnost částečných součtů řady.
 Číselné řady Definice (Posloupnost částečných součtů číselné řady). Nechť je číselná posloupnost. Pro všechna položme. Posloupnost nazýváme posloupnost částečných součtů řady. Definice (Součet číselné
Číselné řady Definice (Posloupnost částečných součtů číselné řady). Nechť je číselná posloupnost. Pro všechna položme. Posloupnost nazýváme posloupnost částečných součtů řady. Definice (Součet číselné
Matematika III. Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská. Ústav matematiky
 Matematika III Řady Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská Ústav matematiky Přednášky ZS 202-203 Obsah Číselné řady. Součet nekonečné řady. Kritéria konvergence 2 Funkční řady. Bodová konvergence.
Matematika III Řady Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská Ústav matematiky Přednášky ZS 202-203 Obsah Číselné řady. Součet nekonečné řady. Kritéria konvergence 2 Funkční řady. Bodová konvergence.
p 2 q , tj. 2q 2 = p 2. Tedy p 2 je sudé číslo, což ale znamená, že
 KAPITOLA 1: Reálná čísla [MA1-18:P1.1] 1.1. Číselné množiny Přirozená čísla... N = {1,, 3,...} nula... 0, N 0 = {0, 1,, 3,...} = N {0} Celá čísla... Z = {0, 1, 1,,, 3,...} Racionální čísla... { p } Q =
KAPITOLA 1: Reálná čísla [MA1-18:P1.1] 1.1. Číselné množiny Přirozená čísla... N = {1,, 3,...} nula... 0, N 0 = {0, 1,, 3,...} = N {0} Celá čísla... Z = {0, 1, 1,,, 3,...} Racionální čísla... { p } Q =
31ZZS 9. PŘEDNÁŠKA 24. listopadu 2014
 3ZZS 9. PŘEDNÁŠKA 24. listopadu 24 SPEKTRÁLNÍ ANALÝZA Fourierovy řady Diskrétní Fourierovy řady Fourierova transformace Diskrétní Fourierova transformace Spektrální analýza Zobrazení signálu ve frekvenční
3ZZS 9. PŘEDNÁŠKA 24. listopadu 24 SPEKTRÁLNÍ ANALÝZA Fourierovy řady Diskrétní Fourierovy řady Fourierova transformace Diskrétní Fourierova transformace Spektrální analýza Zobrazení signálu ve frekvenční
Vzorová písemka č. 1 (rok 2015/2016) - řešení
 - řešení") Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
Vzorová písemka č. rok /6 - řešení Pavla Pecherková. května 6 VARIANTA A. Náhodná veličina X je určena hustotou pravděpodobností: máme hustotu { pravděpodobnosti C x pro x ; na intervalu f x jinde jedná
Derivace funkce. Přednáška MATEMATIKA č Jiří Neubauer
 Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Přednáška MATEMATIKA č. 9-11 Katedra ekonometrie FEM UO Brno kancelář 69a, tel. 973 442029 email:jiri.neubauer@unob.cz Šotová, J., Doudová, L. Diferenciální počet funkcí jedné proměnné Motivační příklady
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Příklad 1 ŘEŠENÉ PŘÍKLADY Z M1A ČÁST 6
 Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly
Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly
2 Fyzikální aplikace. Předpokládejme, že f (x 0 ) existuje. Je-li f (x 0 ) vlastní, pak rovnice tečny ke grafu funkce f v bodě [x 0, f(x 0 )] je
![2 Fyzikální aplikace. Předpokládejme, že f (x 0 ) existuje. Je-li f (x 0 ) vlastní, pak rovnice tečny ke grafu funkce f v bodě [x 0, f(x 0 )] je](/thumbs/102/152847701.jpg "2 Fyzikální aplikace. Předpokládejme, že f (x 0 ) existuje. Je-li f (x 0 ) vlastní, pak rovnice tečny ke grafu funkce f v bodě [x 0, f(x 0 )] je") Derivace funkce a jej geometrický význam Je dána funkce f) 3 6 + 9 + a naším úkolem je určit směrnici tečny v bodě [; f)] Pro libovolné lze směrnici sečny danou body [; f)] a [; f)] spočítat jako f) f)
Derivace funkce a jej geometrický význam Je dána funkce f) 3 6 + 9 + a naším úkolem je určit směrnici tečny v bodě [; f)] Pro libovolné lze směrnici sečny danou body [; f)] a [; f)] spočítat jako f) f)
Funkce tangens. cotgα = = Předpoklady: B a. A Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá b přilehlá
 4..4 Funkce tangens Předpoklady: 40 c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro
4..4 Funkce tangens Předpoklady: 40 c B a A b C Tangens a cotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá cotgα = = a protilehlá Pokud chceme definici pro
REÁLNÁ FUNKCE JEDNÉ PROMĚNNÉ
 REÁLNÁ FUNKCE JEDNÉ PROMĚNNÉ 5 přednáška S funkcemi se setkáváme na každém kroku ve všech přírodních vědách ale i v každodenním životě Každá situace kdy jsou nějaký jev nebo veličina jednoznačně určeny
REÁLNÁ FUNKCE JEDNÉ PROMĚNNÉ 5 přednáška S funkcemi se setkáváme na každém kroku ve všech přírodních vědách ale i v každodenním životě Každá situace kdy jsou nějaký jev nebo veličina jednoznačně určeny
Lineární a adaptivní zpracování dat. 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY
 Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Lineární a adaptivní zpracování dat 1. ÚVOD: SIGNÁLY, ČASOVÉ ŘADY a SYSTÉMY Daniel Schwarz Investice do rozvoje vzdělávání Osnova Úvodní informace o předmětu Signály, časové řady klasifikace, příklady,
Základy teorie pravděpodobnosti
 Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Funkce pro studijní obory
 Variace 1 Funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce Funkce je přiřazení,
Variace 1 Funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce Funkce je přiřazení,
Zimní semestr akademického roku 2014/ prosince 2014
 Cvičení k předmětu BI-ZMA Tomáš Kalvoda Katedra aplikované matematiky FIT ČVUT Matěj Tušek Katedra matematiky FJFI ČVUT Obsah Cvičení Zimní semestr akademického roku 2014/2015 2. prosince 2014 Předmluva
Cvičení k předmětu BI-ZMA Tomáš Kalvoda Katedra aplikované matematiky FIT ČVUT Matěj Tušek Katedra matematiky FJFI ČVUT Obsah Cvičení Zimní semestr akademického roku 2014/2015 2. prosince 2014 Předmluva
Czech Technical University in Prague Faculty of Electrical Engineering. Fakulta elektrotechnická. České vysoké učení technické v Praze
 Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
Z předchozích přednášek víme, že kapacitor a induktor jsou setrvačné obvodové prvky, které ukládají energii Dosud jsme se zabývali ustáleným stavem předpokládali jsme, že v minulosti byly všechny kapacitory
Seznámíte se s pojmem primitivní funkce a neurčitý integrál funkce jedné proměnné.
 INTEGRÁLNÍ POČET FUNKCÍ JEDNÉ PROMĚNNÉ NEURČITÝ INTEGRÁL NEURČITÝ INTEGRÁL Průvodce studiem V kapitole Diferenciální počet funkcí jedné proměnné jste se seznámili s derivováním funkcí Jestliže znáte derivace
INTEGRÁLNÍ POČET FUNKCÍ JEDNÉ PROMĚNNÉ NEURČITÝ INTEGRÁL NEURČITÝ INTEGRÁL Průvodce studiem V kapitole Diferenciální počet funkcí jedné proměnné jste se seznámili s derivováním funkcí Jestliže znáte derivace
Funkce Arcsin. Předpoklady: Některé dosud probírané funkce můžeme spojit do dvojic: 4 je číslo, jehož druhá mocnina se rovná 4.
 ..6 Funkce Arcsin Předpoklady: Některé dosud probírané funkce můžeme spojit do dvojic: Kvadratická funkce Druhá odmocnina y =, 0; ) y = je číslo, jehož druhá mocnina se rovná. - - - - - - y = y = Eponenciální
..6 Funkce Arcsin Předpoklady: Některé dosud probírané funkce můžeme spojit do dvojic: Kvadratická funkce Druhá odmocnina y =, 0; ) y = je číslo, jehož druhá mocnina se rovná. - - - - - - y = y = Eponenciální
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Metody výpočtu limit funkcí a posloupností
 Metody výpočtu limit funkcí a posloupností Martina Šimůnková, 6. listopadu 205 Učební tet k předmětu Matematická analýza pro studenty FP TUL Značení a terminologie R značí množinu reálných čísel, rozšířenou
Metody výpočtu limit funkcí a posloupností Martina Šimůnková, 6. listopadu 205 Učební tet k předmětu Matematická analýza pro studenty FP TUL Značení a terminologie R značí množinu reálných čísel, rozšířenou
Funkce arcsin. Některé dosud probírané funkce můžeme spojit do dvojic: 4 - je číslo, které když dám na druhou tak vyjde 4.
 .. Funkce arcsin Některé dosud probírané funkce můžeme spojit do dvojic: Kvadratická funkce Druhá odmocnina y =, 0; ) y = - je číslo, které když dám na druhou tak vyjde - - - - - - y = y = Eponenciální
.. Funkce arcsin Některé dosud probírané funkce můžeme spojit do dvojic: Kvadratická funkce Druhá odmocnina y =, 0; ) y = - je číslo, které když dám na druhou tak vyjde - - - - - - y = y = Eponenciální
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Lékařská fakulta Masarykovy univerzity Brno. MUDr. Jaromír Šrámek (BFÚ LF MU) Biosignál / 35
 Biosignál / 35") Biosignál MUDr. Jaromír Šrámek Biofyzikální ústav Lékařská fakulta Masarykovy univerzity Brno 2012 MUDr. Jaromír Šrámek (BFÚ LF MU) Biosignál 2012 1 / 35 Obsah co nás dnes čeká... Opakování základních
Biosignál MUDr. Jaromír Šrámek Biofyzikální ústav Lékařská fakulta Masarykovy univerzity Brno 2012 MUDr. Jaromír Šrámek (BFÚ LF MU) Biosignál 2012 1 / 35 Obsah co nás dnes čeká... Opakování základních
sin(x) x lim. pomocí mocninné řady pro funkci sin(x) se středem x 0 = 0. Víme, že ( ) k=0 e x2 dx.
 x lim. pomocí mocninné řady pro funkci sin(x) se středem x 0 = 0. Víme, že ( ) k=0 e x2 dx.") Použití mocniných řad Nejprve si ukážeme dvě jednoduchá použití Taylorových řad. Příklad Spočtěte následující limitu: ( ) sin(x) lim. x x ( ) Najdeme lim sin(x) x x pomocí mocninné řady pro funkci sin(x)
Použití mocniných řad Nejprve si ukážeme dvě jednoduchá použití Taylorových řad. Příklad Spočtěte následující limitu: ( ) sin(x) lim. x x ( ) Najdeme lim sin(x) x x pomocí mocninné řady pro funkci sin(x)
Náhodné (statistické) chyby přímých měření
 chyby přímých měření") Náhodné (statistické) chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně
Náhodné (statistické) chyby přímých měření Hodnoty náhodných chyb se nedají stanovit předem, ale na základě počtu pravděpodobnosti lze zjistit, která z možných naměřených hodnot je více a která je méně
Základy matematiky pro FEK
 Základy matematiky pro FEK 8. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 14 Derivace funkce U lineárních funkcí ve tvaru
Základy matematiky pro FEK 8. přednáška Blanka Šedivá KMA zimní semestr 2016/2017 Blanka Šedivá (KMA) Základy matematiky pro FEK zimní semestr 2016/2017 1 / 14 Derivace funkce U lineárních funkcí ve tvaru
Přechodné děje 2. řádu v časové oblasti
 Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Přechodné děje 2. řádu v časové oblasti EO2 Přednáška 8 Pavel Máša - Přechodné děje 2. řádu ÚVODEM Na předchozích přednáškách jsme se seznámili s obecným postupem řešení přechodných dějů, jmenovitě pak
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Limita posloupnosti a funkce
 Limita posloupnosti a funkce Petr Hasil Přednáška z Matematické analýzy I c Petr Hasil (MUNI) Limita posloupnosti a funkce MA I (M1101) 1 / 90 Obsah 1 Posloupnosti reálných čísel Úvod Limita posloupnosti
Limita posloupnosti a funkce Petr Hasil Přednáška z Matematické analýzy I c Petr Hasil (MUNI) Limita posloupnosti a funkce MA I (M1101) 1 / 90 Obsah 1 Posloupnosti reálných čísel Úvod Limita posloupnosti
Funkce - pro třídu 1EB
 Variace 1 Funkce - pro třídu 1EB Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv využití výukového materiálu je povoleno pouze s odkazem na www.jarjurek.cz. 1. Funkce Funkce je přiřazení, které každému
Variace 1 Funkce - pro třídu 1EB Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv využití výukového materiálu je povoleno pouze s odkazem na www.jarjurek.cz. 1. Funkce Funkce je přiřazení, které každému
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
16. Goniometrické rovnice
 @198 16. Goniometrické rovnice Definice: Goniometrická rovnice je taková rovnice, ve které proměnná (neznámá) vystupuje pouze v goniometrických funkcích. Řešit goniometrické rovnice znamená nalézt všechny
@198 16. Goniometrické rovnice Definice: Goniometrická rovnice je taková rovnice, ve které proměnná (neznámá) vystupuje pouze v goniometrických funkcích. Řešit goniometrické rovnice znamená nalézt všechny
LEKCE10-RAD Otázky
 Řady -ekv ne ŘADY ČÍSEL 1. limita posloupnosti (operace založená na vzdálenosti bodů) 2. supremum nebo infimum posloupnosti (operace založená na uspořádání bodů). Z hlavních struktur reálných čísel zbývá
Řady -ekv ne ŘADY ČÍSEL 1. limita posloupnosti (operace založená na vzdálenosti bodů) 2. supremum nebo infimum posloupnosti (operace založená na uspořádání bodů). Z hlavních struktur reálných čísel zbývá
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
ANALÝZA PNUS, EFEKTIVNÍ HODNOTA, ČINITEL ZKRESLENÍ, VÝKON NEHARMONICKÉHO PROUDU
 ANALÝZA PNUS, EFEKIVNÍ HODNOA, ČINIEL ZKRESLENÍ, VÝKON NEHARMONICKÉHO PROUDU EO Přednáška 4 Pavel Máša X3EO - Pavel Máša X3EO - Pavel Máša - PNUS ÚVODEM Při analýze stejnosměrných obvodů jsme vystačili
ANALÝZA PNUS, EFEKIVNÍ HODNOA, ČINIEL ZKRESLENÍ, VÝKON NEHARMONICKÉHO PROUDU EO Přednáška 4 Pavel Máša X3EO - Pavel Máša X3EO - Pavel Máša - PNUS ÚVODEM Při analýze stejnosměrných obvodů jsme vystačili
KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE
 KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE Slovo kvadrát vzniklo z latinského slova quadratus které znamená: čtyřhranný, čtvercový. Obsah čtverce se vypočítá, jako druhá mocnina délky
KVADRATICKÁ FUNKCE URČENÍ KVADRATICKÉ FUNKCE Z PŘEDPISU FUNKCE Slovo kvadrát vzniklo z latinského slova quadratus které znamená: čtyřhranný, čtvercový. Obsah čtverce se vypočítá, jako druhá mocnina délky
Monotonie a lokální extrémy. Konvexnost, konkávnost a inflexní body. 266 I. Diferenciální počet funkcí jedné proměnné
 66 I. Diferenciální počet funkcí jedné proměnné I. 5. Vyšetřování průběhu funkce Monotonie a lokální etrémy Důsledek. Nechť má funkce f) konečnou derivaci na intervalu I. Je-li f ) > 0 pro každé I, pak
66 I. Diferenciální počet funkcí jedné proměnné I. 5. Vyšetřování průběhu funkce Monotonie a lokální etrémy Důsledek. Nechť má funkce f) konečnou derivaci na intervalu I. Je-li f ) > 0 pro každé I, pak
PRAVDĚPODOBNOST A STATISTIKA
 PRAVDĚPODOBNOST A STATISTIKA Náhodná proměnná Náhodná veličina slouží k popisu výsledku pokusu. Před provedením pokusu jeho výsledek a tedy ani sledovanou hodnotu neznáme. Přesto bychom chtěli tento pokus
PRAVDĚPODOBNOST A STATISTIKA Náhodná proměnná Náhodná veličina slouží k popisu výsledku pokusu. Před provedením pokusu jeho výsledek a tedy ani sledovanou hodnotu neznáme. Přesto bychom chtěli tento pokus
8 Střední hodnota a rozptyl
 Břetislav Fajmon, UMAT FEKT, VUT Brno Této přednášce odpovídá kapitola 10 ze skript [1]. Také je k dispozici sbírka úloh [2], kde si můžete procvičit příklady z kapitol 2, 3 a 4. K samostatnému procvičení
Břetislav Fajmon, UMAT FEKT, VUT Brno Této přednášce odpovídá kapitola 10 ze skript [1]. Také je k dispozici sbírka úloh [2], kde si můžete procvičit příklady z kapitol 2, 3 a 4. K samostatnému procvičení
Funkce kotangens. cotgα = = Zopakuj všechny části předchozí kapitoly pro funkci kotangens. B a
 4.. Funkce kotangens Zopakuj všechny části předchozí kapitoly pro funkci kotangens. c B a A b C Tangens a kotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá
4.. Funkce kotangens Zopakuj všechny části předchozí kapitoly pro funkci kotangens. c B a A b C Tangens a kotangens jsou definovány v pravoúhlém trojúhelníku: a protilehlá tgα = = b přilehlá b přilehlá
Rozdělení náhodné veličiny. Distribuční funkce. Vlastnosti distribuční funkce
 Náhodná veličina motivace Náhodná veličina Často lze výsledek náhodného pokusu vyjádřit číslem: číslo, které padlo na kostce, výška náhodně vybraného studenta, čas strávený čekáním na metro, délka života
Náhodná veličina motivace Náhodná veličina Často lze výsledek náhodného pokusu vyjádřit číslem: číslo, které padlo na kostce, výška náhodně vybraného studenta, čas strávený čekáním na metro, délka života
Diferenciální počet 1 1. f(x) = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.
 = ln arcsin 1 + x 1 x. 1 x 1 a x 1 0. f(x) = (cos x) cosh x + 3x. x 0 je derivace funkce f(x) v bodě x0.") Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Nalezněte definiční obor funkce Diferenciální počet f = ln arcsin + Definiční obor funkce f je určen vztahy Z těchto nerovností plyne < + ln arcsin + je tedy D f =, Určete definiční obor funkce arcsin
Obecná rovnice kvadratické funkce : y = ax 2 + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených funkcí je množina reálných čísel.
 5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
5. Funkce 9. ročník 5. Funkce ZOPAKUJTE SI : 8. ROČNÍK KAPITOLA. Funkce. 5.. Kvadratická funkce Obecná rovnice kvadratické funkce : y = ax + bx + c Pokud není uvedeno jinak, tak definičním oborem řešených
BIOMECHANIKA KINEMATIKA
 BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
BIOMECHANIKA KINEMATIKA MECHANIKA Mechanika je nejstarším oborem fyziky (z řeckého méchané stroj). Byla původně vědou, která se zabývala konstrukcí strojů a jejich činností. Mechanika studuje zákonitosti
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
Vlastnosti konvoluce. ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz
 Systémy Vlastnosti lineárních systémů. Konvoluce diskrétní a spojitý čas. Vlastnosti konvoluce Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Systémy obecně: spojení komponentů, zařízení nebo
Systémy Vlastnosti lineárních systémů. Konvoluce diskrétní a spojitý čas. Vlastnosti konvoluce Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Systémy obecně: spojení komponentů, zařízení nebo
Limita a spojitost funkce
 Limita a spojitost funkce Základ všší matematik Dana Říhová Mendelu Brno Průřezová inovace studijních programů Lesnické a dřevařské fakult MENDELU v Brně (LDF) s ohledem na disciplin společného základu
Limita a spojitost funkce Základ všší matematik Dana Říhová Mendelu Brno Průřezová inovace studijních programů Lesnické a dřevařské fakult MENDELU v Brně (LDF) s ohledem na disciplin společného základu
Aplikace derivace ( )
") Aplikace derivace Mezi aplikace počítáme:. LHospitalovo pravidlo. Etrémy funkce (růst a pokles funkce) 3. Inflee (konávnost a konvenost). Asymptoty funkce (se i bez směrnice) 5. Průběh funkce 6. Ekonomické
Aplikace derivace Mezi aplikace počítáme:. LHospitalovo pravidlo. Etrémy funkce (růst a pokles funkce) 3. Inflee (konávnost a konvenost). Asymptoty funkce (se i bez směrnice) 5. Průběh funkce 6. Ekonomické
Náhodný vektor. Náhodný vektor. Hustota náhodného vektoru. Hustota náhodného vektoru. Náhodný vektor je dvojice náhodných veličin (X, Y ) T = ( X
 T = ( X") Náhodný vektor Náhodný vektor zatím jsme sledovali jednu náhodnou veličinu, její rozdělení a charakteristik často potřebujeme všetřovat vzájemný vztah několika náhodných veličin musíme sledovat jejich
Náhodný vektor Náhodný vektor zatím jsme sledovali jednu náhodnou veličinu, její rozdělení a charakteristik často potřebujeme všetřovat vzájemný vztah několika náhodných veličin musíme sledovat jejich
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ 1. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 2013 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Laboratorní měření 1. Seznam použitých přístrojů. Popis měřicího přípravku
 Laboratorní měření 1 Seznam použitých přístrojů 1. Generátor funkcí 2. Analogový osciloskop 3. Měřící přípravek na RL ČVUT FEL, katedra Teorie obvodů Popis měřicího přípravku Přípravek umožňuje jednoduchá
Laboratorní měření 1 Seznam použitých přístrojů 1. Generátor funkcí 2. Analogový osciloskop 3. Měřící přípravek na RL ČVUT FEL, katedra Teorie obvodů Popis měřicího přípravku Přípravek umožňuje jednoduchá
PRIMITIVNÍ FUNKCE. Primitivní funkce primitivní funkce. geometrický popis integrály 1 integrály 2 spojité funkce konstrukce prim.
 PRIMITIVNÍ FUNKCE V předchozích částech byly zkoumány derivace funkcí a hlavním tématem byly funkce, které derivace mají. V této kapitole se budou zkoumat funkce, které naopak jsou derivacemi jiných funkcí
PRIMITIVNÍ FUNKCE V předchozích částech byly zkoumány derivace funkcí a hlavním tématem byly funkce, které derivace mají. V této kapitole se budou zkoumat funkce, které naopak jsou derivacemi jiných funkcí
Univerzita Karlova v Praze procesy II. Zuzana. funkce
 Náhodné 1 1 Katedra pravděpodobnosti a matematické statistiky Univerzita Karlova v Praze email: praskova@karlin.mff.cuni.cz 11.-12.3. 2010 1 Outline Lemma 1: 1. Nechť µ, ν jsou konečné míry na borelovských
Náhodné 1 1 Katedra pravděpodobnosti a matematické statistiky Univerzita Karlova v Praze email: praskova@karlin.mff.cuni.cz 11.-12.3. 2010 1 Outline Lemma 1: 1. Nechť µ, ν jsou konečné míry na borelovských
Matematika III. 4. října Vysoká škola báňská - Technická univerzita Ostrava. Matematika III
 Vysoká škola báňská - Technická univerzita Ostrava 4. října 2018 Podmíněná pravděpodobnost Při počítání pravděpodobnosti můžeme k náhodnému pokusu přidat i nějakou dodatečnou podmínku. Podmíněná pravděpodobnost
Vysoká škola báňská - Technická univerzita Ostrava 4. října 2018 Podmíněná pravděpodobnost Při počítání pravděpodobnosti můžeme k náhodnému pokusu přidat i nějakou dodatečnou podmínku. Podmíněná pravděpodobnost
Elektrický signál - základní elektrické veličiny
 EVROPSKÝ SOCIÁLNÍ FOND Elektrický signál - základní elektrické veličiny PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
EVROPSKÝ SOCIÁLNÍ FOND Elektrický signál - základní elektrické veličiny PRAHA & EU INVESTUJEME DO VAŠÍ BUDOUCNOSTI Podpora kvality výuky informačních a telekomunikačních technologií ITTEL CZ.2.17/3.1.00/36206
Derivace a monotónnost funkce
 Derivace a monotónnost funkce Věta : Uvažujme funkci f (x), která má na intervalu I derivaci f (x). Pak platí: je-li f (x) > 0 x I, funkce f je na intervalu I rostoucí. je-li f (x) < 0 x I, funkce f je
Derivace a monotónnost funkce Věta : Uvažujme funkci f (x), která má na intervalu I derivaci f (x). Pak platí: je-li f (x) > 0 x I, funkce f je na intervalu I rostoucí. je-li f (x) < 0 x I, funkce f je
NMAF 051, ZS Zkoušková písemná práce 16. ledna 2009
 Jednotlivé kroky při výpočtech stručně, ale co nejpřesněji odůvodněte. Pokud používáte nějaké tvrzení, nezapomeňte ověřit splnění předpokladů. Jméno a příjmení: Skupina: Příklad 3 5 Celkem bodů Bodů 8
Jednotlivé kroky při výpočtech stručně, ale co nejpřesněji odůvodněte. Pokud používáte nějaké tvrzení, nezapomeňte ověřit splnění předpokladů. Jméno a příjmení: Skupina: Příklad 3 5 Celkem bodů Bodů 8
Vstupní signál protne zvolenou úroveň. Na základě získaných údajů se dá spočítat perioda signálu a kmitočet. Obrázek č.2
 2. Vzorkovací metoda Určení kmitočtu z vzorkovaného průběhu. Tato metoda založena na pozorování vstupního signálu pomocí osciloskopu a nastavení určité úrovně, pro zjednodušování považujeme úroveň nastavenou
2. Vzorkovací metoda Určení kmitočtu z vzorkovaného průběhu. Tato metoda založena na pozorování vstupního signálu pomocí osciloskopu a nastavení určité úrovně, pro zjednodušování považujeme úroveň nastavenou