ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
|
|
|
- Dominika Brožová
- před 8 lety
- Počet zobrazení:
Transkript
1 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 4/3 GPS - oskulační elementy dráhy družice školní rok semestr skupina zpracoval datum klasifikace 2010/11 1 NG1-88 Jan Dolista
2 GPS - oskulační elementy dráhy družice Zadání: Na základě skutečných drah družic daných svými přesnými efemeridami v souborech formátu SP3, poskytovaných na serveru služby IGS, sledujte časový průběh oskulačních elementů. Použijte k tomu data pro den = den Vašeho narození + 20 let (resp. totožné datum, pouze rok se zvýsí o 20, je-li tímto dnem neexistující 29.únor, použijte data z 1.dubna). Výpočty provádějte pro družici PRN = 1. Pokud v daném souboru formátu SP3 není družice PRN = 1, použijte nejbližší vyšší PRN (2, 3,... ). Číselné zadání: Průběh oskulačních elementů družice PRN 1 byl sledován pro den , tedy GPS týden 1421 den 6. Vypracování: Veškeré výpočty byly provedeny v programu Octave. Jako geocentrická gravitační konstanta byla použita hodnota GM = 398, m 3 s 2. 1 Poloha družice v průběhu dne K výpočtu oskulačních elementů bylo nutné znát polohu družice v průběhu daného dne a to v inerciálním referenčním systému ICRS, tedy v systému, který nerotuje společně se Zemí. Ze služby IGS lze však získat pouze pozice družic v systému WGS84, který je pevně spojen se Zemí a tedy rotuje. Z tohoto důvodu je nutné polohy družice nejprve transformovat do ICRS. Ze služby IGS byla stažena zdrojová data a to: igs14216.sp3 - soubor obsahující polohu družic v průběhu dne v systému WGS84 igs14216.erp - soubor obsahující parametry rotace Země Číslo vedené v názvu souboru odpovídá číslu GPS týdne (1421) a číslu dne v rámci tohoto týdne (6). Pro převod datumu byl použit GPS kalendář, ze kterého bylo rovněž určeno modifikované juliánské datum dne MDJ Pro transformaci souřadnic byl použit program sp3crs.exe, který je spuštěn s několika paramtery: sp3crs -xp yp ut gp 14 -o igs14216.txt 1 igs14216.sp3 parametry -xp a -yp určují polohu pólu získanou ze souboru.erp parametr -ut určuje rozdíl časů UT1-UTC získaný ze souboru.erp parametr -gp určuje rozdíl času GPS-UTC, ten je složen z rozdílů časů TAI-GPS = 19sec, který je konstantní, a TAI-UTC, který je proměnný, a pro rok 2007 je jeho hodnota 33sec parametr -o udává název výstupního souboru dále je zadáno PRN družice, číslo 1 bez návěští posledním vstupním parametrem je soubor sp3, rovněž bez návěští Jelikož program sp3crs pracuje se starší verzí formátu sp3, je nutné vstupní soubor editovat. Editace spočívá v odmazání posledních čtyř sloupců, udávajících střední chyby, nahrazení písmene G, označujícího družici GPS NAVSTAR mezerou a u PRN družic 1-9 nahradit uvozující nulu opět mezerou.
3 Výstupem programu sp3crs je textový soubor který pro dané PRN obsahuje ve 2. sloupci MDJ, ve 3. sloupci sekundu v rámci daného dne a ve sloupci souřadnice XYZ družice v systému ICRS. 2 Výpočet Keplerovských oskulačních elementů Jelikož je dráha družice rušena působením ostatních vesmírných těles, zejména Slunce a Měsíce, nelze její pohyb popsat pomocí jedné keplerovské elipsy. Avšak dráhu družice mezi dvěma po sobě jdoucími známými polohami ze souboru sp3 lze popsat keplerovskou elipsou, která těmito body prochází. 2.1 Přibližné parametry keplerovské elipsy v prvním bodě Pro výpočet je nejprve nutné určit přibližné parametry keplerovské elipsy popisující pohyb družice mezi první a druhou pozicí známou ze souboru sp3. Jelikož v souboru sp3 jsou uvedeny souřadnice družice v daném okamžiku, lze jednoduše vyjádřit vektor polohy v daném okamžiku. ρ(t) = X(t) Y (t) Z(t) Polohy družice ve dvou po sobě jdoucích okamžicích lze tedy určit pomocí polohových vektorů ρ(t 1 ), ρ(t 2 ) Z těchto vektorů lze vyjádřít přibližný vektor rychlosti družice v prvním z bodů ρ(t 1 ) = ρ(t 2 ) ρ(t 1 ) t 2 t 1 Stavové vektory popisující dráhu družice v prvním bodě ρ(t 1 ), ρ(t 1 ) lze převést na kelperovské elementy popisující tuto dráhu a, e, i, Ω, ω, t per. Pro tento převod byla v programu Octave vytvořena funke sv2ke. Vstupem této funkce jsou stavové vektory ρ(t 1 ), ρ(t 1 ) a čas t 1, výstupem pak keplerovské elementy dráhy družice. Pomocný vektor h = ρ ρ Dále je použito značení velikostí vektorů h = h a ρ = ρ Rektascenze výstupního uzlu Ω = atan h(1) h(2) Sklon dráhy Pravá anomálie Excentricita Hlavní poloosa Vektor polohy v rovině dráhy i = atan v = atan e = a = h(1) 2 + h(2) 2 h h(3) ρ GM ρ ρ h 2 ρ GM 1 h ρ ρ ρ GM sin v h 2 GM (1 e 2 ) R T z r = R x T ( i) R z T ( Ω) ρ
4 Argument šířky Argument perigea Excentrická anomálie Střední anomálie Čas průchodu perigeem u = atan r(2) r(1) ω = u v E = 2atan 1 e 1 + e tanv 2 M = E e sin E t per = t M n, kde n = GM a 3 Tento výpočet přibližných parametrů keplerovksé elipsy byl použit pouze pro první dvojici bodů. Pro následující dvojice byly jako přibližné parametry keplerovské elipsy použity konečné parametry vypočtené pro předchozí dvojici bodů. 2.2 Přiblížení keplerovské elipsy oběma bodům Jelikož pro výpočet parametrů keplerovské elipsy byl použit vektor polohy prvního bodu a přibližný vektor rychlosti, neprochází tato elipsa druhým bodem. Z tohoto důvodu je nutné upravit parametry elipsy tak, aby procházela oběma body. Tento výpočet je prováděn iteračně. ( ρ(t1 ) ρ(t 2 ) ) ( ) ρ0 = 0 (t 1 ) ρ 0 (t 2 ) + A dx, kde ρ je vektror polohy určený ze souřadnic v souboru sp3 (po transformaci do ICRS), ρ 0 je vektor polohy určený z přibližných keplerovských elementů, A matice derivací vektoru ρ podle keplerovských elementů a dx jsou opravy přibližných keplerovských elementů. ρ 0 V dalším výpočtu je použito následující značení: ( ) ρ(t1 ) F = ρ(t 2 ) F 0 = ( ρ0 0 ρ 0 ρ 0 (t 1 ) ρ 0 (t 2 ) ) Přibližný vektor polohy Pro výpočet vektoru polohy z přibližných keplerovských elementů ρ 0 byla opět v programu Octave vytvořena funkce ke2sv, jejímž vstupem jsou přibližné keplerovské elementy a čas pro který má být vektor polohy vypočten, výstupem pak vektor polohy a vektor rychlosti. Střední anomálie M = n (t t per ), kde Excentrická anomálie n = GM a 3 E = M + e sin E Excentrická anomálie byla určena iteračně, kdy v první iteraci je hodnota excentrické anomálie volena E 0 = M + e sin M. V dalších iteracích je hodnota anomálie dána vztahem ρ 0
5 E i = M + e sin E i 1. Výpočet je opakován, dokud rozdíl ve dvou po sobě jdoucích iteracích není menší než Pravá anomálie ( 1 + e v = 2atan tg E ) 1 e 2 Průvodič Vektor polohy v rovině dráhy Vektor rychlosti v rovině dráhy r r r = r = a(1 e cos E) r = r GM a(1 e 2 ) cos u sin u 0 sin v e + cos v 0 Rotace vektorů z roviny dráhy do rovníkového systému ρ = R r ρ ρ ρ = R r r r, kde R je matice rotace R = R z ( Ω) R x ( i) R z ( ω) Matice parciálních derivací Rovněž byla vytvořena funkce maticea pro výpočet matice parciálních derivací A. Vstupem funkce jsou přibližné keplerovské elementy a časový okamžik, ve kterém mají být derivace určeny. Výstupem je matice A. Vektor polohy v rovině dráhy V rámci funkce je neprve vypočten vektor polohy v rovině dráhy, postup výpočtu je shodný jako v předchozí funkci. Derivace podle sklonu dráhy Jelikož sklon dráhy není zahrnut ve vektoru polohy v rovině dráhy, postačí derivovat pouze příslušnou matici rotace. kde ρ i = R z ( Ω) dr x ( i) R z ( ω) r, dr x ( i) = sin ( i) cos ( i) 0 cos ( i) sin ( i) Derivace podle rektascenze výstupního uzlu Obdobně rektascenze výstupního uzlu není zahrnuta ve vektoru polohy v rovině dráhy a postačí tedy derivovat pouze příslušnou matici rotace. kde ρ Ω = dr z ( Ω) R x ( i) R z ( ω) r, dr z ( Ω) = sin ( Ω) cos ( Ω) 0 cos ( Ω) sin ( Ω)
6 Derivace podle argumentu perigea Konečně ani argument perigea není zahrnut ve vektrou polohy v rovině dráhy a postačí tedy derivovat pouze příslušnou matici rotace. kde ρ ω = R z ( Ω) R x ( i) dr z ( ω) r, dr z ( ω) = sin ( ω) cos ( ω) 0 cos ( ω) sin ( ω) Derivace podle hlavní poloosy Oproti tomu hlavní poloosa není zahrnuta v rotacích z roviny dráhy do rovníkového systému. Postačí tedy derivovat vektor polohy v rovině dráhy a následně derivaci rotovat do rovníkového systému. r a = cos E e + 3 a 2 r M sin E ( ) 1 e 2 sin E 3 a 2 r M cos E 0 ρ a = R z ( Ω) R x ( i) R z ( ω) r a Derivace podle excentricity Obdobně lze derivovat i vektor v rovině dráhy podle excentricity a následně provést rotaci r e = a ( 1 + a r sin2 E ) a 2 sin E r (cos E e) 1 e2 0 ρ e = R z ( Ω) R x ( i) R z ( ω) r e Derivace podle času průchodu perigeem Konečně i derivaci podle času průchodu perigeem lze provést v rovině dráhy a následně rotovat. r = t per na2 r na 2 r sin E 1 e 2 cos E 0 Výsledná matice derivací A = ρ = R z ( Ω) R x ( i) R z ( ω) t per ρ(t 1 ) a ρ(t 2 ) a ρ(t 1 ) e ρ(t 2 ) e ρ(t 1 ) i ρ(t 2 ) i ρ(t 1 ) Ω ρ(t 2 ) Ω ρ(t 1 ) ω ρ(t 2 ) ω r t per ρ(t 1 ) t per ρ(t 2 ) t per Iterační řešení Úprava keplerovských elementů tak, aby elipsa procházela oběma body, byla řešena iteračně. Tedy z přibližných parametrů keplerovké elipsy byla pomocí funkcí určena matice derivací a vektor přibližné polohy. Opravy keplerovských elementů jsou pak vypočteny dx = A 1 (F F 0 ) Přičtením oprav k přibližným keplerovským elementům byly vypočteny zpřesněné keplerovské elementy, které byly v další iteraci opět použity jako přibližné.
7 Podmínkou pro ukončení iterace byl rozdíl mezi skutečnými vektory polohy (ze souboru sp3) a přibližnými vektory polohy, který musel být menší než 10 6 F F 0 < 10 6 Poté byly keplerovské elementy považovány za konečné, keplerovská elipsa prochází s dostatečnou přesností oběma body. Tyto konečné keplerovské elementy byly v dalším výpočtu považovány za přibližné keplerovské elementy pro další dvojici bodů. Tímto způsobem byly určeny oskulační elementy pro družici v průběhu celého dne. Na závěr byl průběh oskulačních elementů vynesen do grafů.

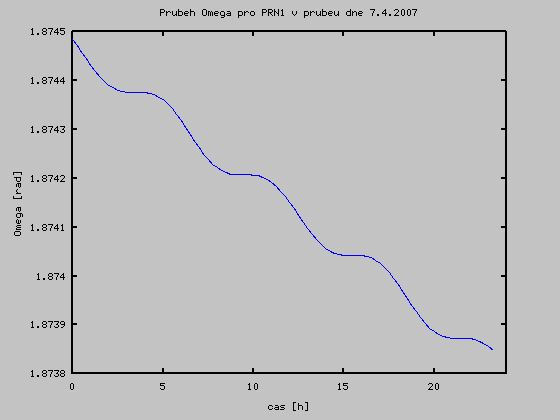
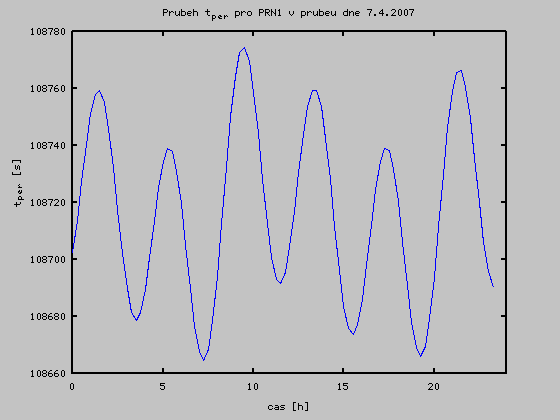
8 3 Grafy průběhu oskulačních elementů družice PRN1 v průběhu dne
9
10
11 4 Číselné výsledky t[sec] a[m] e i[rad] Ω[rad] ω[rad] t per [sec] ,386 0, , , , , ,761 0, , , , , ,309 0, , , , , ,955 0, , , , , ,183 0, , , , , ,194 0, , , , , ,286 0, , , , , ,547 0, , , , , ,463 0, , , , , ,062 0, , , , , ,049 0, , , , , ,591 0, , , , , ,396 0, , , , , ,420 0, , , , , ,617 0, , , , , ,569 0, , , , , ,005 0, , , , , ,851 0, , , , , ,271 0, , , , , ,824 0, , , , , ,934 0, , , , , ,835 0, , , , , ,208 0, , , , , ,718 0, , , , , ,695 0, , , , , ,586 0, , , , , ,467 0, , , , , ,630 0, , , , , ,061 0, , , , , ,681 0, , , , , ,301 0, , , , , ,087 0, , , , , ,528 0, , , , , ,886 0, , , , , ,453 0, , , , , ,035 0, , , , , ,933 0, , , , , ,678 0, , , , , ,129 0, , , , , ,345 0, , , , , ,328 0, , , , , ,808 0, , , , , ,176 0, , , , , ,277 0, , , , , ,513 0, , , , , ,255 0, , , , , ,973 0, , , , , ,097 0, , , , , ,806 0, , , , , ,920 0, , , , , ,359 0, , , , , ,049 0, , , , , ,507 0, , , , , ,044 0, , , , , ,110 0, , , , ,429
12 ,344 0, , , , , ,768 0, , , , , ,418 0, , , , , ,126 0, , , , , ,542 0, , , , , ,159 0, , , , , ,015 0, , , , , ,264 0, , , , , ,895 0, , , , , ,993 0, , , , , ,747 0, , , , , ,351 0, , , , , ,160 0, , , , , ,834 0, , , , , ,537 0, , , , , ,409 0, , , , , ,261 0, , , , , ,203 0, , , , , ,429 0, , , , , ,525 0, , , , , ,506 0, , , , , ,086 0, , , , , ,257 0, , , , , ,054 0, , , , , ,191 0, , , , , ,098 0, , , , , ,251 0, , , , , ,426 0, , , , , ,225 0, , , , , ,953 0, , , , , ,262 0, , , , , ,296 0, , , , , ,323 0, , , , , ,578 0, , , , , ,810 0, , , , , ,276 0, , , , , ,210 0, , , , , ,364 0, , , , , ,001 0, , , , ,255 Závěr: Na základě souřadnic družice, získaných ze souboru sp3 poskytovaného službou IGS byly vypočteny oskulační elementy dráhy v průběhu dne K výpočtu byl rovněž použit soubor erp obsahující parametry rotace Země. Oskulační elementy byly počítány iteračně a to tak, že dvěmi po sobě následujícími polohami družice byla proložena keplerovská elipsa a určeny její keplerovské elementy. Při proložení elipsy body bylo postupováno opět iteračně a to tak, že přibližné parametry keplerovské elipsy byly upravovány dokud oběma body neprocházela s dostatečnou přesností. Na závěr byl průběh oskulačních elementů v rámci dne vynesen do grafů. Výpočty byly provedeny v programu Octave. Zdrojový kód k výpočtům není přílohou technické zprávy (v případě potřeby bude zaslán). V Kralupech nad Vltavou Jan Dolista (so-cool@ehm.cz)
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 2/3 GPS - Výpočet drah družic školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Geodetická astronomie 3/6 Aplikace keplerovského pohybu
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Geodetická astronomie 3/6 Aplikace keplerovského pohybu
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 3/3 GPS - výpočet polohy stanice pomocí
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 1/3 GPS - zpracování kódových měření školní
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 1 1/3 GPS - zpracování kódových měření školní
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 4/003 Průběh geoidu z altimetrických měření
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 4/003 Průběh geoidu z altimetrických měření
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Vyšší geodézie 2 2/6 Transformace souřadnic z ETRF2000 do
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 2/99 Tektonika zemských desek školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 2/99 Tektonika zemských desek školní rok
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Fyzikální geodézie 2/7 Gravitační potenciál a jeho derivace
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Fyzikální geodézie 2/7 Gravitační potenciál a jeho derivace
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Základy fyzikální geodézie 3/19 Legendreovy přidružené funkce
Filip Hroch. Astronomické pozorování. Filip Hroch. Výpočet polohy planety. Drahové elementy. Soustava souřadnic. Pohyb po elipse
 ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
ÚTFA,Přírodovědecká fakulta MU, Brno, CZ březen 2005 březnového tématu Březnové téma je věnováno klasické sférické astronomii. Úkol se skládá z měření, výpočtu a porovnání výsledků získaných v obou částech.
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Fyzikální geodézie 3/7 Výpočet lokálního geoidu pro body
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Fyzikální geodézie 3/7 Výpočet lokálního geoidu pro body
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 1/99 Výpočet zeměpisné šířky z měřených
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 1/99 Výpočet zeměpisné šířky z měřených
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 5/ Určování astronomických zeměpisných
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA VYŠŠÍ GEODÉZIE název předmětu úloha/zadání název úlohy Kosmická geodézie 5/ Určování astronomických zeměpisných
Úloha 3: Určení polohy z kódových měření
 Motivace Úloha 3: Určení polohy z kódových měření Zpracování kódových pozorování je nejjednodušším způsobem určení 3D polohy a je běžnou praxí navigačních i geodetických GPS přijímačů V této úloze navážeme
Motivace Úloha 3: Určení polohy z kódových měření Zpracování kódových pozorování je nejjednodušším způsobem určení 3D polohy a je běžnou praxí navigačních i geodetických GPS přijímačů V této úloze navážeme
Transformace dat mezi různými datovými zdroji
 Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
Transformace dat mezi různými datovými zdroji Zpracovali: Datum prezentace: BUČKOVÁ Dagmar, BUC061 MINÁŘ Lukáš, MIN075 09. 04. 2008 Obsah Základní pojmy Souřadnicové systémy Co to jsou transformace Transformace
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 2 Tvorba tematických
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 2 Tvorba tematických
4. Matematická kartografie
 4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
4. Země má nepravidelný tvar, který je dán půsoením mnoha sil, zejména gravitační a odstředivé (vzhledem k rotaci Země). Odstředivá síla způsouje, že tvar Země je zploštělý, tj. zemský rovník je dále od
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk
 Aleš Bezděk") 5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
5a. Globální referenční systémy Parametry orientace Země (EOP) Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Celková orientace zemského tělesa, tj. precese-nutace+pohyb pólu+vlastní rotace,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu úloha/zadání název úlohy Inženýrská geodézie II 1/5 Určení nepřístupné vzdálenosti
Vytyčení polohy bodu polární metodou
 Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Obsah Vytyčení polohy bodu polární metodou... 2 1 Vliv měření na přesnost souřadnic... 3 2 Vliv měření na polohovou a souřadnicovou směrodatnou odchylku... 4 3 Vliv podkladu na přesnost souřadnic... 5
Slapový vývoj oběžné dráhy. Michaela Káňová, Marie Běhounková Geodynamický seminář
 Slapový vývoj oběžné dráhy Michaela Káňová, Marie Běhounková Geodynamický seminář 20. 5. 2015 Problém dvou těles v nebeské mechanice: dva hmotné body + gravitační síla = Keplerova úloha m keplerovská rychlost
Slapový vývoj oběžné dráhy Michaela Káňová, Marie Běhounková Geodynamický seminář 20. 5. 2015 Problém dvou těles v nebeské mechanice: dva hmotné body + gravitační síla = Keplerova úloha m keplerovská rychlost
Matematické metody v kartografii
 Mtemtické metody v krtogrfii. Přednášk Referenční elipsoid zákldní vzthy. Poloměry křivosti. Délky poledníkového rovnoběžkového oblouku. 1. Zákldní vzthy n rotčním elipoidu Rotční elipsoid dán následujícími
Mtemtické metody v krtogrfii. Přednášk Referenční elipsoid zákldní vzthy. Poloměry křivosti. Délky poledníkového rovnoběžkového oblouku. 1. Zákldní vzthy n rotčním elipoidu Rotční elipsoid dán následujícími
Datová analýza. Strana 1 ze 5
 Strana 1 ze 5 (D1) Binární pulzar Astronomové díky systematickému hledání v posledních desetiletích objevili velké množství milisekundových pulzarů (perioda rotace 10 ms). Většinu těchto pulzarů pozorujeme
Strana 1 ze 5 (D1) Binární pulzar Astronomové díky systematickému hledání v posledních desetiletích objevili velké množství milisekundových pulzarů (perioda rotace 10 ms). Většinu těchto pulzarů pozorujeme
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Globální matice konstrukce
 Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
Globální matice konstrukce Z matic tuhosti a hmotnosti jednotlivých prvků lze sestavit globální matici tuhosti a globální matici hmotnosti konstrukce, které se využijí v řešení základní rovnice MKP: [m]{
l, l 2, l 3, l 4, ω 21 = konst. Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj. analyticky
 Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Kinematické řešení čtyřkloubového mechanismu Dáno: Cíl: l, l, l 3, l, ω 1 konst Proved te kinematické řešení zadaného čtyřkloubového mechanismu, tj analyticky určete úhlovou rychlost ω 1 a úhlové zrychlení
Nalezněte hladiny následujících funkcí. Pro které hodnoty C R jsou hladiny neprázdné
 . Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
. Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
Základní vlastnosti křivek
 křivka množina bodů v rovině nebo v prostoru lze chápat jako trajektorii pohybu v rovině či v prostoru nalezneme je také jako množiny bodů na ploše křivky jako řezy plochy rovinou, křivky jako průniky
křivka množina bodů v rovině nebo v prostoru lze chápat jako trajektorii pohybu v rovině či v prostoru nalezneme je také jako množiny bodů na ploše křivky jako řezy plochy rovinou, křivky jako průniky
1 Funkce dvou a tří proměnných
 1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
1 Funkce dvou a tří proměnných 1.1 Pojem funkce více proměnných Definice Funkce dvou proměnných je předpis, který každému bodu z R 2 (tj. z roviny) přiřazuje jediné reálné číslo. z = f(x, y), D(f) R 2
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
MATEMATIKA II - vybrané úlohy ze zkoušek (2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek (2015) doplněné o další úlohy 24. 2. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi (e-mail: Frantisek.Mraz@fs.cvut.cz
MATEMATIKA II - vybrané úlohy ze zkoušek (2015) doplněné o další úlohy 24. 2. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi (e-mail: Frantisek.Mraz@fs.cvut.cz
9.5. Soustavy diferenciálních rovnic
 Cíle Budeme se nyní zabývat úlohami, v nichž je cílem najít dvojici funkcí y(x), z(x), pro které jsou zadány dvě lineární rovnice prvního řádu, obsahující tyto funkce a jejich derivace. Výklad Omezíme-li
Cíle Budeme se nyní zabývat úlohami, v nichž je cílem najít dvojici funkcí y(x), z(x), pro které jsou zadány dvě lineární rovnice prvního řádu, obsahující tyto funkce a jejich derivace. Výklad Omezíme-li
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY
 APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
APROXIMACE KŘOVÁKOVA ZOBRAZENÍ PRO GEOGRAFICKÉ ÚČELY Radek Dušek, Jan Mach Katedra fyzické geografie a geoekologie, Přírodovědecká fakulta, Ostravská univerzita, Ostrava Gymnázium Omská, Praha Abstrakt
ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE. Matematika 0A1. Cvičení, zimní semestr. Samostatné výstupy. Jan Šafařík
 Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Vysoké učení technické v Brně Stavební fakulta ÚSTAV MATEMATIKY A DESKRIPTIVNÍ GEOMETRIE Matematika 0A1 Cvičení, zimní semestr Samostatné výstupy Jan Šafařík Brno c 2003 Obsah 1. Výstup č.1 2 2. Výstup
Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 1 Mapové podklady
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA MAPOVÁNÍ A KARTOGRAFIE název předmětu TOPOGRAFICKÁ A TEMATICKÁ KARTOGRAFIE číslo úlohy název úlohy 1 Mapové podklady
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
Kartografie 1 - přednáška 2 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Kartografické zobrazení kartografické zobrazení vzájemné přiřazení polohy bodů na dvou různých referenčních
Odchylka ekliptiky od roviny Galaxie
 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy, Plasy 2 Gymnázium Botičská, Praha 3 Gymnázium Nad Štolou, Praha Týden Vědy, 2010 Jiří Kapr 1, Jakub Fuis 2, Tomáš Bárta 3 1 Gymnázium Plasy,
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání U1-U2/190-4 název úlohy Připojovací
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ OBOR GEODÉZIE A KARTOGRAFIE KATEDRA SPECIÁLNÍ GEODÉZIE název předmětu Geodézie v podzemních prostorách 10 úloha/zadání U1-U2/190-4 název úlohy Připojovací
9.1 Definice a rovnice kuželoseček
 9. Kuželosečky a kvadriky 9.1 Definice a rovnice kuželoseček Kuželosečka - řez na kruhovém kuželi, množina bodů splňujících kvadratickou rovnici ve dvou proměnných. Elipsa parametricky: X(t) = (a cos t,
9. Kuželosečky a kvadriky 9.1 Definice a rovnice kuželoseček Kuželosečka - řez na kruhovém kuželi, množina bodů splňujících kvadratickou rovnici ve dvou proměnných. Elipsa parametricky: X(t) = (a cos t,
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Kartografie 1 - přednáška 1 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 Úvod přednášky, cvičení, zápočty, zkoušky Jiří Cajthaml (přednášky, cvičení) potřebné znalosti: vzorce
Insolace a povrchová teplota na planetách mimo sluneční soustavu. Michaela Káňová
 Insolace a povrchová teplota na planetách mimo sluneční soustavu Michaela Káňová Obsah Extrasolární planety Insolace Rovnice vedení tepla v 1D a 3D Testy Výsledky Závěr Extrasolární planety k 11.6. potvrzeno
Insolace a povrchová teplota na planetách mimo sluneční soustavu Michaela Káňová Obsah Extrasolární planety Insolace Rovnice vedení tepla v 1D a 3D Testy Výsledky Závěr Extrasolární planety k 11.6. potvrzeno
Kinematika tuhého tělesa. Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb
 Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Kinematika tuhého tělesa Pohyb tělesa v rovině a v prostoru, posuvný a rotační pohyb Úvod Tuhé těleso - definice všechny body tělesa mají stálé vzájemné vzdálenosti těleso se nedeformuje, nemění tvar počet
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Historie sledování EOP (rotace)
") Historie sledování EOP (rotace) 1895 IAG > ILS, 7 ZT na 39 s.š., stejné hvězdy, stejné přístroje. 1962 IPMS (Mizusawa, JPN), až 80 přístrojů. FK4, různé metody, různé přístroje, i jižní polokoule. 1921
Historie sledování EOP (rotace) 1895 IAG > ILS, 7 ZT na 39 s.š., stejné hvězdy, stejné přístroje. 1962 IPMS (Mizusawa, JPN), až 80 přístrojů. FK4, různé metody, různé přístroje, i jižní polokoule. 1921
III. MKP vlastní kmitání
 Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
Jiří Máca - katedra mechaniky - B325 - tel. 2 2435 4500 maca@fsv.cvut.cz III. MKP vlastní kmitání 1. Rovnice vlastního kmitání 2. Rayleighova Ritzova metoda 3. Jacobiho metoda 4. Metoda inverzních iterací
1. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v
 Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z 3 3xy 8 = 0 v") . a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
. a) Určete parciální derivace prvního řádu funkce z = z(x, y) dané rovnicí z xy 8 = v bodě A =, ]. b) e grafu funkce f najděte tečnou rovinu, která je rovnoběžná s rovinou ϱ. f(x, y) = x + y x, ϱ : x
Otázku, kterými body prochází větev implicitní funkce řeší následující věta.
 1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
1 Implicitní funkce Implicitní funkce nejsou funkce ve smyslu definice, že funkce bodu z definičního oboru D přiřadí právě jednu hodnotu z oboru hodnot H. Přesnější termín je funkce zadaná implicitně.
Shodnostní Helmertova transformace
 Shodnostní Helmertova transformace Toto pojednání ukazuje, jak lze určit transformační koeficienty Helmertovy transformace za požadavku, aby představovaly shodnostní transformaci. Pro jednoduchost budeme
Shodnostní Helmertova transformace Toto pojednání ukazuje, jak lze určit transformační koeficienty Helmertovy transformace za požadavku, aby představovaly shodnostní transformaci. Pro jednoduchost budeme
Praktikum z astronomie 0. Měření refrakce. Zadání
 20. února 2007 Praktikum z astronomie 0 Zadání Astronomická refrakce Úkolem je určit polohu zapadajícího nebo vycházejícího nebeského tělesa měřením a výpočtem. str. 48 Teodolitem změřte polohu známého
20. února 2007 Praktikum z astronomie 0 Zadání Astronomická refrakce Úkolem je určit polohu zapadajícího nebo vycházejícího nebeského tělesa měřením a výpočtem. str. 48 Teodolitem změřte polohu známého
CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I
 Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Informačné a automatizačné technológie v riadení kvality produkcie Vernár,.-4. 9. 005 CITLIVOSTNÍ ANALÝZA DYNAMICKÝCH SYSTÉMŮ I KÜNZEL GUNNAR Abstrakt Příspěvek uvádí základní definice, fyzikální interpretaci
Kreslení elipsy Andrej Podzimek 22. prosince 2005
 Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Kreslení elipsy Andrej Podzimek 22. prosince 2005 Kreslení elipsy v obecné poloze O co půjde Ukázat přesný matematický model elipsy Odvodit vzorce pro výpočet souřadnic důležitých bodů Nalézt algoritmus
Kristýna Bémová. 13. prosince 2007
 Křivky v počítačové grafice Kristýna Bémová Univerzita Karlova v Praze 13. prosince 2007 Kristýna Bémová (MFF UK) Křivky v počítačové grafice 13. prosince 2007 1 / 36 Pojmy - křivky a jejich parametrické
Křivky v počítačové grafice Kristýna Bémová Univerzita Karlova v Praze 13. prosince 2007 Kristýna Bémová (MFF UK) Křivky v počítačové grafice 13. prosince 2007 1 / 36 Pojmy - křivky a jejich parametrické
Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice
 Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice Kartografie přednáška 5 Referenční plochy souřadnicových soustav slouží k lokalizaci bodů, objektů
Referenční plochy a souřadnice na těchto plochách Zeměpisné, pravoúhlé, polární a kartografické souřadnice Kartografie přednáška 5 Referenční plochy souřadnicových soustav slouží k lokalizaci bodů, objektů
2D transformací. červen Odvození transformačního klíče vybraných 2D transformací Metody vyrovnání... 2
 Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Výpočet transformačních koeficinetů vybraných 2D transformací Jan Ježek červen 2008 Obsah Odvození transformačního klíče vybraných 2D transformací 2 Meto vyrovnání 2 2 Obecné vyjádření lineárních 2D transformací
Vzorce a recepty nebeské mechaniky
 Vzorce a recepty nebeské mechaniky Verze 3.0 Petr Scheirich, 2004 http://nebmech.astronomy.cz Obsah 1 Úvod 1 2 Souřadnice na obloze 1 3 Pohyb po kuželosečce 4 4 Elipsa 6 5 Pohybpoelipse 7 6 Parabola 10
Vzorce a recepty nebeské mechaniky Verze 3.0 Petr Scheirich, 2004 http://nebmech.astronomy.cz Obsah 1 Úvod 1 2 Souřadnice na obloze 1 3 Pohyb po kuželosečce 4 4 Elipsa 6 5 Pohybpoelipse 7 6 Parabola 10
Matematika 1 pro PEF PaE
 Tečny a tečné roviny 1 / 16 Matematika 1 pro PEF PaE 7. Tečny a tečné roviny Přemysl Jedlička Katedra matematiky, TF ČZU Tečny a tečné roviny Tečny a normály grafů funkcí jedné proměnné / 16 Tečny a normály
Tečny a tečné roviny 1 / 16 Matematika 1 pro PEF PaE 7. Tečny a tečné roviny Přemysl Jedlička Katedra matematiky, TF ČZU Tečny a tečné roviny Tečny a normály grafů funkcí jedné proměnné / 16 Tečny a normály
Obr. 4 Změna deklinace a vzdálenosti Země od Slunce v průběhu roku
 4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
4 ZÁKLADY SFÉRICKÉ ASTRONOMIE K posouzení proslunění budovy nebo oslunění pozemku je vždy nutné stanovit polohu slunce na obloze. K tomu slouží vztahy sférické astronomie slunce. Pro sledování změn slunečního
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C)
") VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
VZOROVÝ TEST PRO 3. ROČNÍK (3. A, 5. C) max. 3 body 1 Zjistěte, zda vektor u je lineární kombinací vektorů a, b, je-li u = ( 8; 4; 3), a = ( 1; 2; 3), b = (2; 0; 1). Pokud ano, zapište tuto lineární kombinaci.
Prostorové a časové referenční systémy v GNSS. Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 3.
 Prostorové a časové referenční systémy v GNSS Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 3. Osnova přednášky Prostorové referenční systémy v GNSS Inerciální x terestrický
Prostorové a časové referenční systémy v GNSS Ing. Michal Kačmařík, Ph.D. Pokročilé metody zpracování GNSS měření přednáška 3. Osnova přednášky Prostorové referenční systémy v GNSS Inerciální x terestrický
Přednášející: Ing. M. Čábelka Katedra aplikované geoinformatiky a kartografie PřF UK v Praze
 Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Seminář z geoinformatiky Úvod do geodézie Seminář z geo oinform matiky Přednášející: Ing. M. Čábelka cabelka@natur.cuni.cz Katedra aplikované geoinformatiky a kartografie PřF UK v Praze Úvod do geodézie
Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci)
 spojité parciální derivace v bodě a, pak lineární formu (funkci)") 2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
2. Diferenciál funkce, tečná rovina. Diferenciál funkce dvou proměnných. Má-li funkce f = f(x, y) spojité parciální derivace v bodě a, pak lineární formu (funkci) df(a, h) = x (a)h + (a)h 2, h = (h, h
Nebeská mechanika. U3V 1
 Nebeská mechanika Prof. Ing. Miroslav Kasal, CSc. Ústav radioelektroniky FEKT VUT v Brně SD6.97 E-mail kasal@feec.vutbr.cz http://www.urel.feec.vutbr.cz/esl/ http://www.urel.feec.vutbr.cz/esl/files/othact/u3v/3pr.pdf
Nebeská mechanika Prof. Ing. Miroslav Kasal, CSc. Ústav radioelektroniky FEKT VUT v Brně SD6.97 E-mail kasal@feec.vutbr.cz http://www.urel.feec.vutbr.cz/esl/ http://www.urel.feec.vutbr.cz/esl/files/othact/u3v/3pr.pdf
EXPERIMENTÁLNÍ METODY I. 2. Zpracování měření
 FSI VUT v Brně, Energetický ústav Odbor termomechanik a technik prostředí prof. Ing. Milan Pavelek, CSc. EXPERIMENTÁLNÍ METODY I OSNOVA. KAPITOLY. Zpracování měření Zpracování výsledků měření (nezávislých
FSI VUT v Brně, Energetický ústav Odbor termomechanik a technik prostředí prof. Ing. Milan Pavelek, CSc. EXPERIMENTÁLNÍ METODY I OSNOVA. KAPITOLY. Zpracování měření Zpracování výsledků měření (nezávislých
pohyb hvězdy ve vesmírném prostoru vlastní pohyb hvězdy pohyb, změna, souřadné soustavy vzhledem ke stálicím precese,
 Změny souřadnic nebeských těles pohyb hvězdy ve vesmírném prostoru vlastní pohyb hvězdy vlastní pohyb max. 10 /rok, v průměru 0.013 /rok pohyb, změna, souřadné soustavy vzhledem ke stálicím precese, nutace,
Změny souřadnic nebeských těles pohyb hvězdy ve vesmírném prostoru vlastní pohyb hvězdy vlastní pohyb max. 10 /rok, v průměru 0.013 /rok pohyb, změna, souřadné soustavy vzhledem ke stálicím precese, nutace,
4. Statika základní pojmy a základy rovnováhy sil
 4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
4. Statika základní pojmy a základy rovnováhy sil Síla je veličina vektorová. Je určena působištěm, směrem, smyslem a velikostí. Působiště síly je bod, ve kterém se přenáší účinek síly na těleso. Směr
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu VÝUKA V TERÉNU Z GEODÉZIE 1, 2 - VY1 kód úlohy název úlohy K PŘÍMÉ
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA STAVEBNÍ, OBOR GEODÉZIE A KARTOGRAFIE KATEDRA GEODÉZIE A POZEMKOVÝCH ÚPRAV název předmětu VÝUKA V TERÉNU Z GEODÉZIE 1, 2 - VY1 kód úlohy název úlohy K PŘÍMÉ
7. Gravitační pole a pohyb těles v něm
 7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
7. Gravitační pole a pohyb těles v něm Gravitační pole - existuje v okolí každého hmotného tělesa - představuje formu hmoty - zprostředkovává vzájemné silové působení mezi tělesy Newtonův gravitační zákon:
Metodika převodu mezi ETRF2000 a S-JTSK varianta 2
 Výzkumný ústav geodetický topografický a kartografický v.v.i. Stavební fakulta ČVUT v Praze Metodika převodu mezi ETRF a S-JTSK varianta Jan Kostecký Jakub Kostecký Ivan Pešek GO Pecný červen 1 1 Úvod
Výzkumný ústav geodetický topografický a kartografický v.v.i. Stavební fakulta ČVUT v Praze Metodika převodu mezi ETRF a S-JTSK varianta Jan Kostecký Jakub Kostecký Ivan Pešek GO Pecný červen 1 1 Úvod
Základní vlastnosti ploch
 plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
plocha zpravidla se definuje jako výsledek spojitého pohybu jisté tvořící křivky podél zadané trajektorie lze obohatit o možnost spojitých změn tvaru tvořící křivky x v průběhu pohybu podél trajektorie
[0] ÚVOD: [0.1] Stručná historie. [0.2] Systém GPS-NAVSTAR
![[0] ÚVOD: [0.1] Stručná historie. [0.2] Systém GPS-NAVSTAR](/thumbs/23/1990126.jpg "[0] ÚVOD: [0.1] Stručná historie. [0.2] Systém GPS-NAVSTAR") [] ÚVOD: [.] Stručná historie Zde bych rád napsal několik málo řádek o budování systému GPS NAVSTAR. To začalo v roce 973 a bylo koncipováno jako obranný navigační sytém Spojených Států Amerických. Vedením
[] ÚVOD: [.] Stručná historie Zde bych rád napsal několik málo řádek o budování systému GPS NAVSTAR. To začalo v roce 973 a bylo koncipováno jako obranný navigační sytém Spojených Států Amerických. Vedením
Úvod do předmětu geodézie
 1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
1/1 Úvod do předmětu geodézie Ing. Hana Staňková, Ph.D. IGDM, HGF, VŠB-TU Ostrava hana.stankova@vsb.cz A911, 5269 1 Geodézie 1/2 vědní obor o měření části zemského povrchu, o určování vzájemných vztahů
Úvod do nebeské mechaniky
 OPT/AST L09 Úvod do nebeské mechaniky pohyby astronomických těles ve společném gravitačním poli obecně: chaotický systém nestabilní numerické řešení speciální případ: problém dvou těles analytické řešení
OPT/AST L09 Úvod do nebeské mechaniky pohyby astronomických těles ve společném gravitačním poli obecně: chaotický systém nestabilní numerické řešení speciální případ: problém dvou těles analytické řešení
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek v letech
 MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
T a c h y m e t r i e
 T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
T a c h y m e t r i e (Podrobné měření výškopisu, okolí NTK) Poslední úprava: 2.10.2018 9:59 Úkolem je vyhotovit digitální model terénu pomocí programového systému Atlas DMT (úloha U_7, vztažné měřítko
ČASOMÍRA ROTAČNÍ ČASY FYZIKÁLNĚ DEFINOVANÉ ČASY JULIÁNSKÉ DATUM
 ČASOMÍRA ROTAČNÍ ČASY FYZIKÁLNĚ DEFINOVANÉ ČASY JULIÁNSKÉ DATUM Hynčicová Tereza, H2IGE1 2014 ČAS Jedna ze základních fyzikálních veličin Využívá se k určení časových údajů sledovaných jevů Časovou škálu
ČASOMÍRA ROTAČNÍ ČASY FYZIKÁLNĚ DEFINOVANÉ ČASY JULIÁNSKÉ DATUM Hynčicová Tereza, H2IGE1 2014 ČAS Jedna ze základních fyzikálních veličin Využívá se k určení časových údajů sledovaných jevů Časovou škálu
III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce. a = (x 0, y 0 ), h = (h 1, h 2 ).
, h = (h 1, h 2 ).") III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce = f(x 0 + h 1, y 0 + h 2 ) f(x 0, y 0 ) f u (x 0, y 0 ), kde u = (h 1, h 2 ). ( ) = f(x 0 + h 1, y 0 ) f(x 0, y 0 ) x (x 0,
III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce = f(x 0 + h 1, y 0 + h 2 ) f(x 0, y 0 ) f u (x 0, y 0 ), kde u = (h 1, h 2 ). ( ) = f(x 0 + h 1, y 0 ) f(x 0, y 0 ) x (x 0,
Iterační metody řešení soustav lineárních rovnic. 27. prosince 2011
 Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Iterační metody řešení soustav lineárních rovnic Michal Čihák 27. prosince 2011 Přímé metody řešení soustav lineárních rovnic V přednáškách z lineární algebry jste se seznámili s několika metodami řešení
Jiří Cajthaml. ČVUT v Praze, katedra geomatiky. zimní semestr 2014/2015
 Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
Kartografie 1 - přednáška 7 Jiří Cajthaml ČVUT v Praze, katedra geomatiky zimní semestr 2014/2015 válcové konformní zobrazení v transverzální poloze někdy také nazýváno transverzální Mercatorovo nebo Gauss-Krügerovo
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ITO. Semestrální projekt. Fakulta Informačních Technologií
 ITO Semestrální projekt Autor: Vojtěch Přikryl, xprikr28 Fakulta Informačních Technologií Vysoké Učení Technické v Brně Příklad 1 Stanovte napětí U R5 a proud I R5. Použijte metodu postupného zjednodušování
ITO Semestrální projekt Autor: Vojtěch Přikryl, xprikr28 Fakulta Informačních Technologií Vysoké Učení Technické v Brně Příklad 1 Stanovte napětí U R5 a proud I R5. Použijte metodu postupného zjednodušování
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Semestrální projekt. Vyhodnocení přesnosti sebelokalizace VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ. Fakulta elektrotechniky a komunikačních technologií
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Fakulta elektrotechniky a komunikačních technologií Semestrální projekt Vyhodnocení přesnosti sebelokalizace Vedoucí práce: Ing. Tomáš Jílek Vypracovali: Michaela Homzová,
+ 2y y = nf ; x 0. závisí pouze na vzdálenosti bodu (x, y) od počátku, vyhovuje rovnici. y F x x F y = 0. x y. x x + y F. y = F
 od počátku, vyhovuje rovnici. y F x x F y = 0. x y. x x + y F. y = F") Příkad 1 ( y ) Dokažte, že funkce F (x, y) = x n f x 2, kde f je spojitě diferencovatelná funkce, vyhovuje vztahu x F x + 2y F y = nf ; x 0 Ukažte, že každá funkce F (x, y), která má spojité parciální
Příkad 1 ( y ) Dokažte, že funkce F (x, y) = x n f x 2, kde f je spojitě diferencovatelná funkce, vyhovuje vztahu x F x + 2y F y = nf ; x 0 Ukažte, že každá funkce F (x, y), která má spojité parciální
2. Kinematika bodu a tělesa
 2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
2. Kinematika bodu a tělesa Kinematika bodu popisuje těleso nebo také bod, který se pohybuje po nějaké trajektorii, křivce nebo jinak definované dráze v závislosti na poloze bodu na dráze, rychlosti a
[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2
![[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2](/thumbs/102/153207878.jpg "[obrázek γ nepotřebujeme, interval t, zřejmý, integrací polynomu a per partes vyjde: (e2 + e) + 2 ln 2. (e ln t = t) ] + y2") 4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
4.1 Křivkový integrál ve vektrovém poli přímým výpočtem 4.1 Spočítejte práci síly F = y i + z j + x k při pohybu hmotného bodu po orientované křivce, která je dána jako oblouk ABC na průnikové křivce ploch
4. Dynamika letu umělých družic Aleš Bezděk
 4. Dynamika letu umělých družic Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Úvod do astrodynamiky Astrodynamika je studium pohybu umělých objektů v kosmickém prostoru, na které působí jak
4. Dynamika letu umělých družic Aleš Bezděk Teoretická geodézie 4 FSV ČVUT 2017/2018 LS 1 Úvod do astrodynamiky Astrodynamika je studium pohybu umělých objektů v kosmickém prostoru, na které působí jak
GEODETICKÉ VÝPOČTY I.
 SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
SPŠS Č.Budějovice Obor Geodézie a Katastr nemovitostí 2.ročník GEODETICKÉ VÝPOČTY I. TABELACE FUNKCE LINEÁRNÍ INTERPOLACE TABELACE FUNKCE Tabelace funkce se v minulosti často využívala z důvodu usnadnění
3. Souřadnicové výpočty
 3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
3. Souřadnicové výpočty 3.1 Délka. 3.2 Směrník. 3.3 Polární metoda. 3.4 Protínání vpřed z úhlů. 3.5 Protínání vpřed z délek. 3.6 Polygonové pořady. 3.7 Protínání zpět. 3.8 Transformace souřadnic. 3.9 Volné
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
Pokyny k hodnocení MATEMATIKA
 Pokyny k hodnocení MTEMTIK Pokyny k hodnocení úlohy Je dán číselný výraz: 6 4 8 Výraz zapište jako mocninu čísla. SPRÁVNÉ ŘEŠENÍ, resp. SPRÁVNÉ ŘEŠENÍ S TOLERNCÍ NEDOSTTEČNÉ ŘEŠENÍ, resp. 4 99 3 0, resp.3
Pokyny k hodnocení MTEMTIK Pokyny k hodnocení úlohy Je dán číselný výraz: 6 4 8 Výraz zapište jako mocninu čísla. SPRÁVNÉ ŘEŠENÍ, resp. SPRÁVNÉ ŘEŠENÍ S TOLERNCÍ NEDOSTTEČNÉ ŘEŠENÍ, resp. 4 99 3 0, resp.3
11MAMY LS 2017/2018. Úvod do Matlabu. 21. února Skupina 01. reseni2.m a tak dále + M souborem zadané funkce z příkladu 3 + souborem skupina.
 11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
11MAMY LS 2017/2018 Cvičení č. 2: 21. 2. 2018 Úvod do Matlabu. Jan Přikryl 21. února 2018 Po skupinách, na které jste se doufám rozdělili samostatně včera, vyřešte tak, jak nejlépe svedete, níže uvedená
GEODETICKÁ ASTRONOMIE A KOSMICKÁ GEODEZIE I
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ JAN FIXEL, RADOVAN MACHOTKA GEODETICKÁ ASTRONOMIE A KOSMICKÁ GEODEZIE I MODUL 01 SFÉRICKÁ ASTRONOMIE STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ JAN FIXEL, RADOVAN MACHOTKA GEODETICKÁ ASTRONOMIE A KOSMICKÁ GEODEZIE I MODUL 01 SFÉRICKÁ ASTRONOMIE STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU FORMOU
Integrace. Numerické metody 7. května FJFI ČVUT v Praze
 Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Integrace Numerické metody 7. května 2018 FJFI ČVUT v Praze 1 Úvod Úvod 1D Kvadraturní vzorce Gaussovy kvadratury Více dimenzí Programy 1 Úvod Úvod - Úloha Máme funkci f( x) a snažíme se najít určitý integrál
Michal Zamboj. December 23, 2016
 Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Meziřádky mezi kuželosečkami - doplňkový materiál k přednášce Geometrie Michal Zamboj December 3, 06 Pozn. Najdete-li chybu, neváhejte mi napsat, může to ušetřit tápání Vašich kolegů. Pozn. v dokumentu
Triangulace a trilaterace
 Výuka v terénu z vyšší geodézie Triangulace a trilaterace Staré Město pod Sněžníkem 2015 1 Popis úlohy V rámci úlohy Triagulace budou metodami klasické geodézie (triangulace, trilaterace, astronomické
Výuka v terénu z vyšší geodézie Triangulace a trilaterace Staré Město pod Sněžníkem 2015 1 Popis úlohy V rámci úlohy Triagulace budou metodami klasické geodézie (triangulace, trilaterace, astronomické
1.2 Sluneční hodiny. 100+1 příklad z techniky prostředí
 1.2 Sluneční hodiny Sluneční hodiny udávají pravý sluneční čas, který se od našeho běžného času liší. Zejména tím, že pohyb Slunce během roku je nepravidelný (to postihuje časová rovnice) a také tím, že
1.2 Sluneční hodiny Sluneční hodiny udávají pravý sluneční čas, který se od našeho běžného času liší. Zejména tím, že pohyb Slunce během roku je nepravidelný (to postihuje časová rovnice) a také tím, že